Isight与simulink联合优化设置流程精编WORD版
simulink模块属性设置及功能介绍
第 7 章 Simulink的应用
图7.2库模块浏览器
图7.3 新建的空白模块窗口
第 7 章 Simulink的应用
7.2
Simulink的仿真原理
7.2.1 Simulink仿真模块
通常,Simulink仿真系统包括输入(Input)、状态(states)和输出(Output)三个部分。
· 输入模块:即信号源模块,包括常数字信号源和用户自定义信号; · 状态模块:即被模拟的系统模块,是系统建模的核心和主要部分; · 输出模块:即信号显示模块,它能够以图形方式、文件格式进行显示。 注意:在设计一个模型时,必须先确定这三个部分的意,以及它们之间的联系; Simulink的仿真模型并非一定要完全包括这三个部分,它可以缺少其中一个或者两个;
MATLAB-simulink建模与sisotool校正word版本
M A T L A B-s i m u l i n k建模与s i s o t o o l校正
以下步骤为matlab7.5.0 (R2007b)的步骤。
建立原系统的框图,开始不考虑TL,.所以设TL为零,并封装为下图Gm(s).封装参数如下;
在子系统Gm(s)的两端通过选中连线,右击,设置线性输入输出点。
再TOOLS—control design—linear analysis。
浮现对话框:
单击标记处:
单击file——export,出现下面对话框:
选中model,单击export to workspace:
再在命令窗口:输入 sisotool,回车,出现下面对话框:
单击标记处,进入矫正传函参数的设置。
在单击file——import,出现下框:
单击标记处,再单击browse,进入
按标记操作,
再单击OK,进入:
这是没有矫正系统的零极点图,和BODE图。
单击analysis——response to step command,出现原系统单位反馈的step响应。
在原系统中任意加入一个实极点和实零点。
进入下面的对话款,设置相应的增益,零点和极点值
如图:
单位阶跃响应为:
此时。
Bode图为
在对上图,作如下操作,file——export:
作上图操作
可得矫正环节的:
其中校正环节方框图为:
总连线图:
最终仿真结果:。
ISIGHT里面的优化方法
ISIGHT里面的优化方法大致可分为三类:1 数值优化方法数值优化方法通常假设设计空间是单峰值的,凸性的,连续的。
iSIGHT中有以下几种:(1)外点罚函数法(EP):外点罚函数法被广泛应用于约束优化问题。
此方法非常很可靠,通常能够在有最小值的情况下,相对容易地找到真正的目标值。
外点罚函数法可以通过使罚函数的值达到无穷值,把设计变量从不可行域拉回到可行域里,从而达到目标值。
(2)广义简约梯度法(LSGRG2):通常用广义简约梯度算法来解决非线性约束问题。
此算法同其他有效约束优化一样,可以在某方向微小位移下保持约束的有效性。
(3)广义虎克定律直接搜索法:此方法适用于在初始设计点周围的设计空间进行局部寻优。
它不要求目标函数的连续性。
因为算法不必求导,函数不需要是可微的。
另外,还提供收敛系数(rho),用来预计目标函数方程的数目,从而确保收敛性。
(4)可行方向法(CONMIN):可行方向法是一个直接数值优化方法,它可以直接在非线性的设计空间进行搜索。
它可以在搜索空间的某个方向上不断寻求最优解。
用数学方程描述如下:Design i = Design i-1 + A * Search Direction i方程中,i表示循环变量,A表示在某个空间搜索时决定的常数。
它的优点就是在保持解的可行性下降低了目标函数值。
这种方法可以快速地达到目标值并可以处理不等式约束。
缺点是目前还不能解决包含等式约束的优化问题。
(5)混合整型优化法(MOST):混合整型优化法首先假定优化问题的设计变量是连续的,并用序列二次规划法得到一个初始的优化解。
如果所有的设计变量是实型的,则优化过程停止。
否则,如果一些设计变量为整型或是离散型,那么这个初始优化解不能满足这些限制条件,需要对每一个非实型参数寻找一个设计点,该点满足非实型参数的限制条件。
这些限制条件被作为新的约束条件加入优化过程,重新优化产生一个新的优化解,迭代依次进行。
在优化过程中,非实型变量为重点考虑的对象,直到所有的限制条件都得到满足,优化过程结束,得到最优解。
isight优化使用方法

0、proc文件中的几个重要的关键词*save_as_model D:\optiext\extrusion.mud yes*write_marc D:\optiext\extrusion.dat yes*quit yes1、Mentat的背景执行过程文件test.proc.命令行:mentat -pr test.proc(必须有文件全名)2、Marc的背景执行模型文件model.dat命令行:run_marc -jid mode l -ver no -back no(可以省略扩展名)3、提取Marc结果的python程序为MarcResult.py其目的是从marc输出t16文件extrusion.t16中提取结果,输出到extrusion.res中去。
(按照自己的需要进行修改)使用方法python ExtractMarcResult.py extrusion.t16 extrusion.res源程序:from py_post import *import stringimport sysimport timedef Extract(fname1,fname2):p=post_open(fname1)ninc=p.increments()p.moveto(ninc-1)nodes=p.nodes()elements=p.elements()xlist=[]ylist=[]for i in range(0,elements):el=p.element(i)for j in range(0,el.len):nodeid=el.item[j]nodeseq=p.node_sequence(nodeid)node=p.node(nodeseq)if (node.x,nodeid) not in xlist:xlist.append(node.x,nodeid)if (node.x,nodeid) not in ylist:ylist.append(node.y,nodeid)xlist.sort()ylist.sort()ylist.reverse()#get upper die cbody forceupdieforcex=p.cbody_force(1)[0]updieforcey=p.cbody_force(1)[1]out=open(fname2,'w',-1)str="%10g %10g %10g %10g\n" % (-xlist[0][0]+30,ylist[0][0]*2,-1*updieforcex,updieforcey)out.write(str)out.close()if __name__=='__main__':Extract(sys.argv[1],sys.argv[2])print '\a'4、对分析结果的备份如果希望备份每次执行的结果,可以运用下面这个程序BackFile.cpp。
iSIGHT优化技术

下面对每种优化技术进行一下介绍。
1.外点罚函数法(Exterior Penalty)
外点罚函数法广泛的用于含有约束条件的优化问题。在处理含有约束条件的优化问题 时,借助惩罚函数把约束问题转化为无约束的问题,进而用无约束的最优化方法求解。实现 这一目标的途径是由目标函数和约束函数组成辅助函数来完成的。如果该问题存在最优解, 其优化结果通常是可信的,并且相对来说更容易找到真正的最优解。当惩罚因子趋向∞
次的迭代中将原问题在 X i 处以一阶泰勒级数展开。如此反复,以线性规划问题去近似非线
性规划问题,希望每次迭代得到的新的设计点都比前一个设计点更接近原问题的最优点。而 在新的设计点上的近似子问题,也愈来愈接近原非线性问题最优点的附近区域。最终线性规 划问题的最优点可以以很高的精度接近原问题的最优点。
Φ(x) = F(x) + P(x)
转换出的无约束问题就是使 Φ(x) 最小化或最大化。
对于罚函数法的效率和鲁棒性和直接法比较的研究显示,直接法更加健壮,只需要很少 的函数评估。而当你使用一个罚函数法的时候,函数评估的次数会成倍增加。
罚函数法包括: l 外点罚函数法(Exterior Penalty) l Hooke-Jeeves直接搜索法(Hooke-Jeeves Direct Search Method)
l 能快速得到一个优化设计; l 能处理不等式和等式约束; l 在优化中能十分准确地满足约束。 下面是修正可行方向法的解决问题步骤:
1. q = 0, x = x0
2. q = q + 1
23
3. 求 F (x) 和 g j (x) 的值; j = 1,2,...., M
4. 确定临界的约束集,J
isight参数优化理论与实例详解
前言●Isight 5.5简介笔者自2000年开始接触并采用Isight软件开展多学科设计优化工作,经过12年的发展,我们欣喜地看到优化技术已经深深扎根到众多行业,帮助越来越多的中国企业提高产品性能和品质、降低成本和能耗,取得了可观的经济效益和社会效益。
作为工程优化技术的优秀代表,Isight 5.5软件由法国Dassault/Simulia公司出品,能够帮助设计人员、仿真人员完成从简单的零部件参数分析到复杂系统多学科设计优化(MDO, Multi-Disciplinary Design Optimization)工作。
Isight将四大数学算法(试验设计、近似建模、探索优化和质量设计)融为有机整体,能够让计算机自动化、智能化地驱动数字样机的设计过程,更快、更好、更省地实现产品设计。
毫无疑问,以Isight为代表的优化技术必将为中国经济从“中国制造”到“中国创造”的转型做出应有的贡献!●本书指南Isight功能强大,内容丰富。
本书力求通过循序渐进,图文并茂的方式使读者能以最快的速度理解和掌握基本概念和操作方法,同时提高工程应用的实践水平。
全书共分十五章,第1章至第7章为入门篇,介绍Isight的界面、集成、试验设计、数值和全局优化算法;第8章至第13章为提高篇,全面介绍近似建模、组合优化策略、多目标优化、蒙特卡洛模拟、田口稳健设计和6Sigma品质设计方法DFSS(Design For 6Sigma)的相关知识。
●本书约定在本书中,【AA】表示菜单、按钮、文本框、对话框。
如果没有特殊说明,则“单击”都表示用鼠标左键单击,“双击”表示用鼠标左键双击。
在本书中,有许多“提示”和“试一试”,用于强调重点和给予读者练习的机会,用户最好详细阅读并亲身实践。
本书内容循序渐进,图文并茂,实用性强。
适合于企业和院校从事产品设计、仿真分析和优化的读者使用。
在本书出版过程中,得到了Isight发明人唐兆成(Siu Tong)博士、Dassault/Simulia(中国)公司负责人白锐、陈明伟先生的大力支持,工程师张伟、李保国、崔杏圆、杨浩强、周培筠、侯英华、庞宝强、胡月圆、邹波等参与撰写,李鸽、杨新龙也为本书提供了宝贵的建议和意见,在此向所有关心和支持本书出版的人士表示感谢。
simulink操作流程
simulink操作流程Simulink操作流程。
一、啥是Simulink呢?Simulink呀,就像是一个超级好玩的积木搭建世界。
它是MATLAB里的一个超酷的工具,让咱们可以轻松地构建各种各样的系统模型呢。
比如说,你要是想模拟一个汽车的行驶过程,或者是一个电路的工作状态,Simulink就可以帮你搞定。
它就像一个万能的小助手,只要你有想法,就能在这个小天地里把想法变成模型。
二、打开Simulink的大门。
1. 先得打开MATLAB哦。
这就像是进入魔法世界得先找到入口一样。
打开MATLAB 之后呢,在它的主界面里,就能看到Simulink的图标啦,就像一个小宝藏的入口标志。
轻轻一点那个图标,就进入到Simulink的世界咯。
2. 刚进去的时候,可能会觉得有点眼花缭乱。
不过别担心,这就像你第一次走进一个超级大的游乐场,到处都是新鲜好玩的东西。
你会看到一个大大的空白区域,这就是咱们要大展身手的地方啦。
三、开始搭积木——构建模型。
1. 找模块。
- 在Simulink的左边有一个长长的库,这里面藏着各种各样的模块,就像一个个小零件。
比如说,如果你要构建一个数学计算的模型,就能在Math Operations这个库里找到加法、减法、乘法之类的模块。
这些模块长得都挺有趣的,就像一个个小方块,上面还有一些简单的标识,让你一眼就能看出来它是干啥的。
- 要是想做个信号处理的模型,Signal Processing库里的模块就派上用场啦。
你可以像在玩具箱里找玩具一样,在这些库里翻找你需要的模块。
2. 拖模块。
- 当你找到想要的模块之后呢,就可以用鼠标把它拖到中间的空白区域啦。
这感觉就像从玩具箱里拿出一个小积木,然后放到搭建台上。
比如说,你拖了一个正弦波模块到中间,它就静静地待在那儿,等着和其他模块交朋友呢。
3. 连接模块。
- 光有孤零零的模块可不行,还得把它们连接起来。
这就像把小积木用小棍子连接起来一样。
用鼠标点住一个模块的输出口(一般是小箭头),然后拖到另一个模块的输入口上,就把它们连接起来啦。
iSIGHT优化设计—Optimization

iSIGHT优化设计—Optimization 1 概述1.1 传统劳动密集型的人工设计1.2 iSIGHT智能软件机器人驱动的设计优化1.3 优化问题特征(1)约束(3)非线性(6)组合问题(7)优化问题按特征分类对优化设计的研究不断证实,没有任何单一的优化技术可以适用于所有设计问题。
实际上,单一的优化技术甚至可能无法很好地解决一个设计问题。
不同优化技术的组合最有可能发现最优设计。
优化设计极大地依赖于起始点的选择,设计空间本身的性质(如线形、非线形、连续、离散、变量数、约束等等)。
iSIGHT 就此问题提供两种解决方案。
第一,iSIGHT 提供完备的优化工具集,用户可交互式选用并可针对特定问题进行定制。
第二,也是更重要的,iSIGHT 提供一种多学科优化操作模式,以便把所有的优化算法有机组合起来,解决复杂的优化设计问题。
2 优化算法概述iSIGHT 包含的优化方法可以分为四大类:数值优化、全局探索法、启发式优化法和多目标多准则优化算法。
数值优化(如爬山法)一般假设设计空间是单峰的,凸起的和连续的,本质上是一种局部优化技术。
全局探索技术则避免了局限于局部区域,一般通过评估整个设计空间的设计点来寻找全局最优。
启发式技术是按用户定义的参数特性和交叉影响方向寻找最优方案。
多目标优化则需要权衡,iSIGHT 正是提供了一种易于使用的多目标准则权衡分析框架。
另外自iSIGHT v9.0 开始新增加了Pointer 优化器,它是GA、MPQL、N-M 单纯形法以及线性单纯形法的组合。
iSIGHT 包含的具体算法按分类列表如下:2.1 数值方法iSIGHT 纳入了十二种数值优化算法。
其中八种是直接法,在数学搜索过程中直接处理约束条件。
而Exterior Penalty 方法和Hooke-Jeeves 方法是罚函数法,它们通过在目标函数中引入罚函数将约束问题转化为无约束问题。
2.2 全局探索法iSIGHT 全局探索法包括遗传算法和模拟退火算法,它们不受凸(凹)面性、光滑性或设计空间连续性的限制。
Isight 与ABAQUS 联合设置

Isight / ABAQUS 设置实例1)介绍在这个例子中,需要使用Isight对一个ABAUQS模型进行参数优化。
ABAQUS模型中使用到用户子程序。
后处理中使用到python语言提取odb中信息。
2)环境参数设置因为在ABAQUS中使用到了用户子程序,所以需要预先设置所需要的路径,不然在Isight 运行时会出现“Problem during compilation - ifort.exe not found in PATH. ”的错误。
设置的过程很简单,先找到“ifortvars.bat”,然后将里面的变量和路径复制到系统的环境变量中(右键我的电脑->属性->高级)。
如图设置好后需要重启Isight,这样环境变量和路径才会更新。
3)Isight优化流程介绍(版本Isight 5.5-1)a)输入变量为Inp文件中某些材料参数b)“Abaqus”:运行一个含有用户子程序的模型,并用python程序读取odb文件中某些信息c)“R2_Calculation”:运行一个python程序来进行一些拟合计算,保存在xls文件中。
d)“Excel”:定义输出变量。
4)输入变量的定义和提取这个优化只针对几个材料参数,不需要重写inp文件,所以就不使用userscript_cae_pre.py.首先在ABAQUS插件中的Input页面,选择好inp文件,然后点读取文件由于我需要提取的变量“User Material”不再默认变量中,所以一开始在变量列表中不会看到我需要的变量。
下图为inp文件这样的话就需要修改AbqConfig.txt ,默认在Isight安装目录下config目录。
根据格式添加然后再读取文件,列表中就出现我所需要的变量了。
选中需要的参数作为输入变量。
5)ABAQUS命令行设置如下图,命令行内容为:“abq6101.bat input=DOE8_t97_original_v2.4.inp job=DOE8_t97_original_v2.4 interactive double user="C:\Documents and Settings\admin\Desktop\Isight\VUMAT_2.4.for" ”其中关键字不能缩写,用户子程序需要绝对路径,不然找不到。
【精品】SIMULINK仿真参数的设置
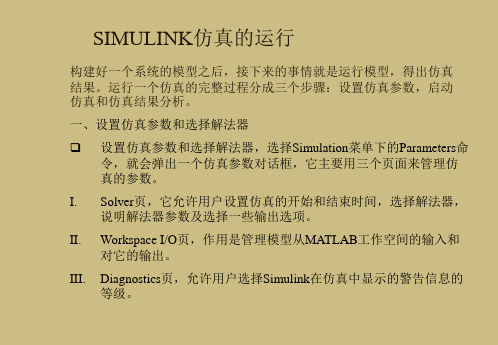
d) ode2:改进的欧拉法。 e) f) ode1:欧拉法。 discrete:是一个实现积分的固定步长解法器,它适合于离散无连续状 态的系统。
3) 步长参数:对于变步长模式,用户可以设置最大的和推荐的初始步长 参数,缺省情况下,步长自动地确定,它由值auto表示。
a) Maximum step size(最大步长参数):它决定了解法器能够使用的最 大时间步长,它的缺省值为“仿真时间/50”,即整个仿真过程中至少 取50个取样点,但这样的取法对于仿真时间较长的系统则可能带来取 样点过于稀疏,而使仿真结果失真。一般建议对于仿真时间不超过15s 的采用默认值即可,对于超过15s的每秒至少保证5个采样点,对于超 过100s的,每秒至少保证3个采样点。
3、Diagnostics页
此页分成两个部分:仿真选项和配置选项。配置选项下的列表框主要 列举了一些常见的事件类型,以及当SIMULINK检查到这些事件时给 予的处理。仿真选项options主要包括是否进行一致性检验、是否禁用 过零检测、是否禁止复用缓存、是否进行不同版本的SIMULINK的检 验等几项。 除了上述3个主要的页外,仿真参数设置窗口还包括real-time workshop 页,主要用于与C语言编辑器的交换,通过它可以直接从SIMULINK 模型生成代码并且自动建立可以在不同环境下运行的程序,这些环境 包括实时系统和单机仿真。
5) Mode(固定步长模式选择)
a) Multitasking:选择这种模式时,当simulink检测到模块间非法的采样 速率转换,它会给出错误提示。所谓的非法采样速率转换指两个工作 在不同采样速率的模块之间的直接连接。在实时多任务系统中,如果 任务之间存在非法采样速率转换,那么就有可能出现一个模块的输出 在另一个模块需要时却无法利用的情况。通过检查这种转换, Multitasking将有助于用户建立一个符合现实的多任务系统的有效模型。 使用速率转换模块可以减少模型中的非法速率转换。Simulink提供了 两个这样的模块:unit delay模块和zero-order hold模块。对于从慢速率 到快速率的非法转换,可以在慢输出端口和快输入端口插入一个单位 延时unit delay模块。而对于快速率到慢速率的转换,则可以插入一个 零阶采样保持器zero-order hold。
基于Isight平台DOE方法的并联机构多目标优化设计
基于Isight平台DOE方法的并联机构多目标优化设计杜岩锦;郭宗和;李泽众【摘要】以提高并联机构的整体性能为目的.以3-PUU并联机构为例,首先根据虚设机构法建立影响系数矩阵,包括雅可比矩阵和海塞矩阵,并通过Adams虚拟建模仿真验证影响系数矩阵的正确性,然后综合考虑工作空间、速度、加速度、惯性力等方面的需求建立并联机构的性能指标,根据性能指标多目标优化设计模型,最后基于Isight软件集成MATLAB,采用最优拉丁超立方法进行试验设计,通过NSGA-II 算法进行多目标优化设计.优化结果表明,基于Isight的多目标优化设计方法不仅高效而且可以得到Pareto解集,决策者可以根据并联机构的具体服役环境权衡选择整体性能最优解.【期刊名称】《制造业自动化》【年(卷),期】2017(039)007【总页数】7页(P99-105)【关键词】并联机构;影响系数矩阵;实验设计;多目标优化设计;Isight【作者】杜岩锦;郭宗和;李泽众【作者单位】山东理工大学机械工程学院,淄博 255049;山东理工大学机械工程学院,淄博 255049;山东理工大学机械工程学院,淄博 255049【正文语种】中文【中图分类】TH122并联机构以其运动精度高、刚性好、动态响应灵敏、承载能力强等优点被广泛应用于运动模拟器、工业机器人、虚拟轴机床、微动机械、医用机器人等多个领域[1]。
并联机构的多个需求性能之间存在着或相互制约、或相互耦合的的关系,某项性能指标的提高有可能是以其他性能指标的下降为条件,因此在并联机构整体性能的优化设计中,要把多个性能需求同时考虑在内,以多个性能指标为目标函数建立多目标优化设计模型,对并联机构进行多目标优化设计。
在传统的优化设计[2,3]过程中,设计者们大多数采用多目标优化算法进行繁琐的数学推导,理论性强,计算复杂,工作量大。
随着计算机技术的快速发展,计算机辅助优化软件Isight[4]在航空航天、飞行器的优化设计[5]中取得了显著成果。
iSIGHT优化设计—Optimization

iSIGHT 优化设计一Optimization1概述1.1传统劳动密集型的人工设计1.2iSIGHT 智能软件机器人驱动的设计优化icnciic c j illon---■Are ---Lksi^nr^quircHicnt^pl'licd '.'亠才人的叠和列話足够设il~{AdequateDesign)用井析和Mtt 评忻性能改变设it 变量改变设it 变量"Are ■---designrequirenientsplblksd '.'亠十理拝初崎设计首动化的过建足HttEf {AdequateDesign]|探索算法和优化第略1.3优化问题特征•设计变量数目•设计变量取值类型;/连续型、离散型、整数型、连续/离散混舎型♦有无约束条件•解空间线性、非线性•解空间的多峰性、凸性♦计算时间•计算精度(1)约束约耒1I:可芍区城—目标函数等值线©最优解車2 3)非线性5)离散取值gi(«)o6o◎釜粒弓邑最工归—_-曲木;坐^冶6)组合问题J孙阿旦W員込期1阳(归往斗雷弼题2分立宦界袪比如.X,領的的JMfcA.B,C-«利尺寸XI .M 3.E J-*Jj]>](A/jai') Jubf'.fr?琼舟宀一,耳)冬0j =1.2,...m■MS*E)N Q It =1,21{u J t.fl\刊书.Xj .Xj t Xj JWWW7)优化问题按特征分类对优化设计的研究不断证实,没有任何单一的优化技术可以适用于所有设计问题。
实际上,单一的优化技术甚至可能无法很好地解决一个设计问题。
不同优化技术的组合最有可能发现最优设计。
优化设计极大地依赖于起始点的选择,设计空间本身的性质(如线形、非线形、连续、离散、变量数、约束等等)。
iSIGHT就此问题提供两种解决方案。
第一,iSIGHT提供完备的优化工具集,用户可交互式选用并可针对特定问题进行定制。
Isight多学科、多目标设计优化
经过近30年的不断研发,Isight已经得到大量世界级客户 如波音、空客、NASA、洛-马等航空航天客户广泛使用并 认同。在2002年Isight进入中国市场之后,迅速获得了高 校、航空、航天、船舶、汽车等国内领先的高新技术研究 部门认可。
北京思易特科技有限责任公司
问题背景
柴油机性能的提高需要通过有效地组织整机的热力过程、合 理地选择工作过程的参数及与之有关的结构参数来实现。计 算机仿真和优化技术可以有效解除设计者的繁重劳动,同时 大幅度缩短研制周期。
优化问题描述
1.压缩比与喷油提前角的优化:优化目标为油耗最低,爆 压不超标 ;自变量参数为燃烧提前角、压缩比 2.进排气管管径优化:目标函数为多个计算点的充气效率 均值;设计变量为:进气管容积V1、排气管内径 3.气门定时优化:目标函数为多个计算点的充气效率均 值;设计变量为:进气管容积V1、排气管内径IVO、IVC、 EVO、EVC
f2
f1
近似模型
帮助用户快速拟合生成数学代理模型,从而 避免在需要多次迭代计算的优化工程中运行 大规模的CAE 分析模型。 包括:1~4阶响应面模型(RSM)、椭圆基神 经网络、径向基函数(RBF) 神经网络、 Kriging模型等。
质量设计
实现设计阶段的质量控制,提高产品可靠性和稳健性,降 低制造和维修成本。 包括:蒙特卡洛分析、田口设计、6Sigma稳健可靠性分析 和优化。
Isight多学科、多目标设计优化技术
缩短产品研制周期,提高性能和可靠性,助力中国 “智造”
北京思易特科技有限公司
SYTNA Technologies Corp., Ltd.
目录
第1页 第2-3页 第4页 Isight概述——缩短设计周期,节省研制成本,提高产品性能和质量 Isight核心功能 案例1:汽车动力传动系统优化匹配(长安汽车) 案例2:柴油发动机性能综合优化(玉柴机器) 第5页 案例3:白车身架构优化设计(泛亚汽车) 案例4:动力总成悬置系统的优化设计(一汽) 第6页 案例5:航空涡轮发动机(通用电气GE) 案例6:A380客机总体/结构/气动优化(空客) 第7页 案例7:空间望远镜光机热多学科优化(某航天单位) 案例8:小水线面双体船水下部分外形优化( NAVATEK ) 第8页 案例9:集成电力电子模块IPEM多学科设计优化(美国电力电子CPEC) 案例10:基于硬件在环(HIL)仿真的控制系统优化设计
达索系统SIMULIA平台多参多学科优化软件Isight

达索系统SIMULIA平台多参多学科优化软件Isight国内CAE仿真经过近二十年的发展,企业目前已不仅仅关注仿真本身,而是更多的考虑以下的三大领域:(1) 关注点从一般仿真分析向优化分析的过渡;(2) CAE仿真分析专业化,规范化和流程化;(3) CAE仿真分析问题的复杂化,涉及跨领域多学科复合问题。
我们将对上述三点分别进行解说。
1.1 从仿真分析到优化的过渡对于现今机械行业的从业人员来说,计算机辅助仿真分析方法已经被大家熟知并被广泛应用于各行各业,以实现仿真数字样机虚拟试验替代物理样机真实试验的最终目标。
随着国内CAE仿真分析水平的提升,在仿真分析方法和模式已经比较成熟的基础上,为了更有效的应用仿真分析结果,达到仿真分析结果指导产品设计的目的,优化方法和相应优化软件逐渐被引入到CAE部门的工作环节中。
如何应用优化软件搭建优化流程,以及通过什么样的优化方法和模式实现优化过程,成为很多企业CAE团队关注的问题。
根据上述需求,达索系统提供了Isight软件,作为多参数多学科优化工具平台,可以结合仿真分析工具(例如ABAQUS)实现仿真优化流程的搭建,解决产品设计与仿真联合优化的问题。
1.2 仿真规范化和流程化随着企业CAE团队的日益壮大与成熟,以及仿真数据的积累,这些企业都对仿真规范流程的搭建提出了迫切需求。
如今高性能计算资源极大丰富,并且可预见到在不久的将来量子计算机的发展和实用化将会带来计算资源的飞跃式增长。
对于CAE行业来说,计算机硬件将不再是仿真分析的瓶颈与桎梏,而大量的仿真模型处理任务和大量的待处理仿真数据将成为CAE团队的极大负担。
首先,如何将仿真流程规范化;其次,如何结合软件工具将相应流程固化;最终,如何尽可能使仿真流程自动化。
以上三点已经成为CAE行业想要发展壮大必须解决的问题。
在Isight中,我们可以通过有机的组合应用流程组件和应用组件创建仿真流程模板,通过源生应用组件和二次开发实现与第三方软件之间的调用和信息交互,通过Isight丰富的开发接口创建和开发仿真模板和定制模块。
isight软件集成基础流程
i s i g h t软件集成基础流程(总3页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March1、ISIGHT软件功能介绍(1)Isight主要功能有:流程集成自动化、试验设计、近似建模、多目标优化等(2)Isight应用领域:广泛应用于各种需要进行参数优化和集成优化的领域(3)isight目前的版本为,,,2016年以后采用年份编号,2016,2017,2016版以后必须需要ie10支持(4)需要集成的软件必须具有批处理的能力。
(5)采用软件进行优化的时候可以采用DOE获取内在的变化规律,根据规律进行改进,DOE优化确定初始点为优化提供基础。
(6)近似模型:实验数据的分析处理,且进行误差分析,模型的相关度不高不能用。
线性问题误差要求在以上,非线性的问题误差一般在以上。
2、软件集成的必要条件(常用软件集成的命令)(1)集成的软件必须支持批处理的能力(2)在集成的过程中不建议采用专用的软件接口(Adams/car等),建议采用simcode和oscommand 的格式,这样可以避免一些未知的问题产生。
(3)将需要软件集成的文件单独放入文件夹中且调试通过。
(以proe与ansys 的集成为例进行说明①首先建立runproe文件夹将PROE需要的文件单独放入该文件夹中,修改输入文件中的参数,双击bat文件,需要生成文件且文件是正确的②首先建立runansys文件夹将ANSYS需要的文件单独放入该文件夹中,修改输入文件中的参数,双击bat文件,需要生成文件且文件返回的结果是正确的③建立proe_ansys的文件夹,将上述的输入文件放在同一个,分别双击bat 文件,保证模型生成的正确性)(4)常用的软件批处理的命令如下所示:①abaqus:"D:\Software_instation\CAE_Tool\Abaqus\Commands\" input= job= model interactive②Adams/car"D:\adams\2012\common\" acar ru-standard -b③ANSYS"D:\Program Files\\ANSYS Inc\v160\ANSYS\bin\ winx64 \" -b -p -i -o④catia"D:\Software_instation \Catia\catia\win_b64\code\bin\" -batch -macro⑤Marccmd /c D:/Marc/ -bg -prcmd /c D:\\Marc\ -jid⑥UG"D:\Program Files\ Siemens\NX \UGII\"⑦NASTRSN"E:\ Nastran\20101\bin\"⑧LSDYNA"D:\LSDYNA\program\" i="D:\LSDYNA\program\"⑨CREOcmd /c "C:\Program Files\PTC\Creo \B000\Parametric\bin\" pro_waittaskkill /f /im⑩hyprmesh"D:\Program Files\Altair\\hm\bin\win32\" -tcl3、ISIGHT软件集成(1)打开isight软件,建立一个新的zmf文件,进行组件集成;(2)将建立好的zmf文件保存至工作目录下,并定义模型的路径为{modeldir},使所有的文件均存放在{modeldir}下面。
MATLAB-simulink建模与sisotool校正word版本
M A T L A B-s i m u l i n k建模与s i s o t o o l校正
以下步骤为matlab7.5.0 (R2007b)的步骤。
建立原系统的框图,开始不考虑TL,.所以设TL为零,并封装为下图Gm(s).封装参数如下;
在子系统Gm(s)的两端通过选中连线,右击,设置线性输入输出点。
再TOOLS—control design—linear analysis。
浮现对话框:
单击标记处:
单击file——export,出现下面对话框:
选中model,单击export to workspace:
再在命令窗口:输入 sisotool,回车,出现下面对话框:
单击标记处,进入矫正传函参数的设置。
在单击file——import,出现下框:
单击标记处,再单击browse,进入
按标记操作,
再单击OK,进入:
这是没有矫正系统的零极点图,和BODE图。
单击analysis——response to step command,出现原系统单位反馈的step响应。
在原系统中任意加入一个实极点和实零点。
进入下面的对话款,设置相应的增益,零点和极点值
如图:
单位阶跃响应为:
此时。
Bode图为
在对上图,作如下操作,file——export:
作上图操作
可得矫正环节的:
其中校正环节方框图为:
总连线图:
最终仿真结果:。