(完整版)测试装置的基本特性
2测试装置的基本特性

第二节 测试装置的静态特性
测试装置的静态特性是指静态测量情况下描述实际测试 装置与理想定常线性系统的接近程度。 •线性度 •灵敏度 •分辨力 •回程误差 •漂移
一、线性度
定义:测量装置输出、输入之间的关系与理想比例关系 的偏离程度。 线性误差的两种表达形式: * 静态标定所得输入、输出数据点与理想直线的最大偏差Δmax * 百分数表达
2 n H ( s) 2 2 s 2n s n
二、一阶、二阶系统的特性 (1)一阶系统
+ u i(t ) - R + C u o(t ) -
dxo RC xo xi dt
dy t a0 y t b0 x t 一般形式的一阶微分方程式: a1 dt dy t 改写为: T y t Sx t dt
(4)脉冲响应函数
已知: 若装置的输入为单位脉冲函数 由于 ,则有 。
对上式两边取拉氏逆变换,且令 则有
上式表明,单位脉冲函数的响应同样可描述测量系统的动态特性,它同 传递函数是等效的,不同的是一个在复频域 ,一个是在时间域,通常称 h(t) 为脉冲响应函数。脉冲响应函数可视为系统特性的时域描述。
T=a1/a0-系统时间常数 ; S=b0/a0-系统静态灵敏度 ; 为了分析方便,令S=1,
dy t T y t x t dt
一阶系统的特性
•传递函数: H ( s ) •频响函数:H ( )
1 Ts 1
1 jT 1
1 1 (T ) 2
x(t) 0 t0 t
测量装置实现测量不失真的频率特性
时域条件
y(t)= A0 x(t- t0)
式中:A0、t0均为常数。
第二章测试装置的基本特性
输入输出(响应)系统第二章 测试装置的基本特性第一节 概述测试是具有试验性质的测量,是从客观事物取得有关信息的过程。
在此过程中须借助测试装置。
为实现某种量的测量而选择或设计测量装置时,就必须考虑这些测量装置能否准确获取被测量的量值及其变化,即实现准确测量,而能否实现准确测量,则取决于测量装置的特性。
这些特性包括动态特性、静态特性、负载特性、抗干扰性等。
测量装置的特性是统一的,各种特性之间是相互关联的。
1、测试装置的基本要求通常工程测试问题总是处理输入量)(t x 、装置(系统)的传输特性)(t h 和输出量)(t y 三者之间的关系。
图2-1系统、输入和输出1)当输入、输出是可测量的(已知),可以通过它们推断系统的传输特性。
(系统辨识)。
2)当系统特性已知,输出可测量,可以通过它们推断导致该输出的输入量。
(反求)。
3)如果输入和系统特性已知,则可以推断和估计系统的输出量。
(预测) 。
测试装置的基本特性主要讨论测试装置及其输入、输出的关系。
理想的测试装置应该具有单值的、确定的输入——输出关系。
即对应于某一输入量,都只有单一的输出量与之对应 。
知道其中的一个量就可以确定另一个量。
以输出和输入成线性关系为最佳。
一般测量装置只能在较小工作范围内和在一定误差允许范围内满足这项要求。
2、测量装置的静态特性测试系统的静态特性就是在静态测量情况下,描述实际测试装置与理想定常线性系统的接近程度。
测量装置的静态特性是通过某种意义的静态标定过程确定的。
静态标定是一个实验过程,这一过程是在只改变测量装置的一个输入量,而其他所有的可能输入严格保持为不变的情况下,测量对应得输出量,由此得到测量装置的输入输出关系。
3、测量装置的动态特性测量装置的动态特性是当被测量即输入量随时间快速变化时,测量输入与响应输出之间的动态关系得数学描述。
研究测量装置动态特性时,认为系统参数不变,并忽略迟滞、游隙等非线性因素,可用常系数线性微分方程描述测量装置输入与输出间的关系。
第三章 测试装置的基本特性

S=y/x
如果是线性理想系统,则
y
1——标定曲线
2——拟合直线
S y y b0 常数 x x a0
1. 一位移传感器,当位移变化为1mm时, 输出电压变化为300mV,则灵敏度
S=300/1 =300mV/mm
2.一机械式位移传感器,输入位移变化为 0.01mm时,输出位移变化为10mm,则 灵敏度(放大倍数) S=10/0.01=1000
无论你怎样地表示愤怒,都不要做出 任何无法挽回的事来。
——弗兰西斯·培根
Francis Bacon
英国 哲学家 1561-1626
第三章 测试装置的基本特性
§3.1 概述
▼
§3.2 测试装置的静态特性
▼
§3.3 测试装置的动态特性
▼
§3.4 实现不失真测量的条件
▼
§3.5 典型系统的频率响应特性
▼
输入和输出的各阶导数均等于零。
yy((tt))
静态输入
y b0 x Sx a0
➢ 理想测试装置的输入、输出之间呈单调、线性
线性段
比例关系。即输入、输出关系是一条理想的直
线,斜率为S= b0/a0 。
00
线性段
xx((tt))
理实想际线线性性
(1) 灵敏度
当测试装置的输入x有一增量x,引起输出 y 发生相应的 变化y时,则灵敏度定义:
实例
线性误差=Bmax/A×100%
y
1——)
Bi =2V
xi
y
1——标定曲线
2——拟合直线
2
1
yi
y(i)
Bi =2V
xi
10V 1000V
0
输入范围
测试装置的基本特性

P 1
P
1
2
(2) Bode 图 ---- 对数频率特性图 a)对数频率特性
lg G j lg A e
j
lg A
j lg e
对数频率特性由对数幅频特性图、对数相频特性图描述; b)对数频率特性图(Bode图)坐标系
x (t ) y (t )
x1 ( t ) x 2 ( t ) y1 ( t ) y 2 ( t )
⑵ 比例性 ax ( t ) ay ( t )
dx ( t ) dt dy ( t ) dt
(3)微分性
系统对原输入信号的微分等于原输出信号的微
分,即 若 x(t) → y(t),则 x’(t) → y’(t)
⑷ 积分:初始状态为零:t=0时,
x (t ) dx ( t ) dt y (t ) 0
t0
x ( t ) dt
0
t0
y ( t ) dt
0
⑸ 频率保持性:输入为某一频率的信号 输出必为同一频率的信号
若 x(t)=Acos(ωt+φx)
则 y(t)=Bcos(ωt+φy)
A
L
对数 幅频 100 特性 10 图
1
60 dB 40 20
L 20 lg A Q arctg P
1
10
100
对数 相频 特性 图
20 0
1
10
100
20
Bode图介绍
Bode图介绍
dx ( t )
3.1 测试装置的基本特性-测试装置概述
研究测试装置的目的 为实现某种物理量的测量而选择或设计 测量装置时, 测量装置时,就必须考虑该装置能否准确获 得被测量的量值及其变化, 实现准确测量, 得被测量的量值及其变化,即实现准确测量, 而是否能够实现准确测量,则取决于测量装 而是否能够实现准确测量,则取决于测量装 置的特性。 置的特性。
第三节 测量装置的动态特性
y y y
x
x
x
线性
线性
非线性
第一节 测试装置概述
测试技术与信号处理
1.测量装置的静态特性 1.测量装置的静态特性
当被测量不随时间变化或变化缓慢时, 当被测量不随时间变化或变化缓慢时,输出量 与输入量之间的关系成为静态特性 静态特性, 与输入量之间的关系成为静态特性,可以用代 数方程表示。 数方程表示。 过程确定的。 是通过某种意义的 静态标定 过程确定的。 是一个实验过程,这一过程是在只改变测量装置的 是一个实验过程, 一个输入量,而其他所有的可能输入量严格保持不 一个输入量,而其他所有的可能输入量严格保持不 的情况下,测量对应的输出量, 变的情况下,测量对应的输出量,由此得到测量装 置输入与输出之间的关系。 置输入与输出之间的关系。
环境变化或干扰输入的影响
...
第一节 测试装置概述
测试技术与信号处理
在静态标定的过程中,只改变一个被标定的量, 在静态标定的过程中,只改变一个被标定的量, 其他量只能近似保持不变,严格保持不变是不可能 其他量只能近似保持不变, 近似保持不变 用精密仪器测量输入量( 的→用精密仪器测量输入量(被测量)和被标定测 用精密仪器测量输入量 被测量) 量装置的输出的同时,还要用精密仪器测量若干环 量装置的输出的同时,还要用精密仪器测量若干环 境变量或干扰变量输入和输出。 境变量或干扰变量输入和输出。 输入变量-1 输入变量 标准仪器 输入(被测量) 输入(被测量) 标准仪器 输入变量-2 输入变量 标准仪器
第三章测试装置的基本特性
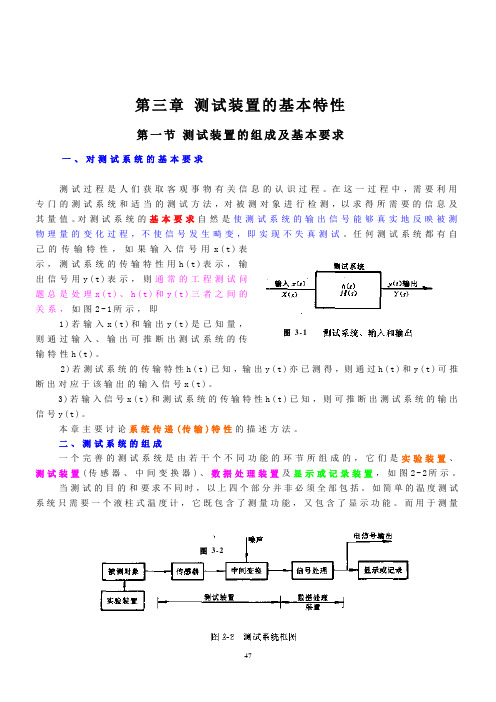
第三章测试装置的基本特性第一节测试装置的组成及基本要求一、对测试系统的基本要求测试过程是人们获取客观事物有关信息的认识过程。
在这一过程中,需要利用专门的测试系统和适当的测试方法,对被测对象进行检测,以求得所需要的信息及其量值。
对测试系统的基本要求自然是使测试系统的输出信号能够真实地反映被测物理量的变化过程,不使信号发生畸变,即实现不失真测试。
任何测试系统都有自己的传输特性,如果输入信号用x(t)表示,测试系统的传输特性用h(t)表示,输出信号用y(t)表示,则通常的工程测试问题总是处理x(t)、h(t)和y(t)三者之间的关系,如图2-1所示,即1)若输入x(t)和输出y(t)是已知量,图3-1则通过输入、输出可推断出测试系统的传输特性h(t)。
2)若测试系统的传输特性h(t)已知,输出y(t)亦已测得,则通过h(t)和y(t)可推断出对应于该输出的输入信号x(t)。
3)若输入信号x(t)和测试系统的传输特性h(t)已知,则可推断出测试系统的输出信号y(t)。
本章主要讨论系统传递(传输)特性的描述方法。
二、测试系统的组成一个完善的测试系统是由若干个不同功能的环节所组成的,它们是实验装置、测试装置(传感器、中间变换器)、数据处理装置及显示或记录装置,如图2-2所示。
当测试的目的和要求不同时,以上四个部分并非必须全部包括。
如简单的温度测试系统只需要一个液柱式温度计,它既包含了测量功能,又包含了显示功能。
而用于测量图3-2机械构件频率响应的测试系统,则是一个相当复杂的多环节系统,如图2-3所示。
实验装置是使被测对象处于预定状态下,并将其有关方面的内在特性充分显露出来,它是使测量能有效进行的一种专门装置。
例如,测定结构的动力学参数时,所使用的激振系统就是一种实验装置。
它由信号发生器、功率放大器和激振器组成。
信号发生器提供正弦信号,其频率可在一定范围内变化,此正弦信号经功率放大器放大后,去驱动激振器。
激振器产生与信号发生器的频率相一致的交变激振力,此力通过力传感器作用于被测对象上,从而使被测对象处于该频率激振下的强迫振动状态。
02测试装置的基本特性

※测试装置的静态特性: 就是在静态测量情况下描述实际测试装置 与理想时不变线性系统的接近程度。 (主要讨论在静态测量情况下,描述输入 与输出之间的关系)
测量装置的静态特性由通过某种意义的静态标定过程所确定。 静态标定:是一个实验过程。这一过程是在只改变测量装置的 一个输入量,而其他所有的可能输入严格保持不变 的情况下,测量对应的输出量,由此得到测量装置 输入与输出间的关系。
x(t ) x0 e jt,则
y(t ) y 0 e
j (t )
三、测试和测试装置的若干术语 ※静态测量:测量期间被测量值可认为是恒定的测量量, 即被测量不随时间变化,则称为静态测量。
5
2.1 概述
※动态测量:是为确定值的瞬时值及其随时间变化的量所 进行的测量。 ※信噪比:信号功率与干扰噪声功率之比,记作 SNR 用分贝(dB)来表示,即 Ns SNR 10 lg Nn N s —信号功率
2.3 测试装置的动态特性(dynamic characteristics)
b频率响应函数的求法 方法二:通过实验测定 方法三:H()=Y()/X()(初始条件全为零的条件下) 说明:尽管频率响应函数对简谐信号而言,但是,任何信 号都可以分解为简谐信号的叠加。因而,在任何复杂信号 输入下,系统频率响应特性都适用。
x1 (t ) x2 (t ) y1 (t ) y2 (t )
※作用在定常系统的各个输入所产生的输出互不影响。 n个激励同时作用一个测试系统,其响应等于这n个激励单独 作用的响应和。复杂信号→系列谐波信号(付氏级数展开)
②比例特性/均匀性:对于任意常数
ax(t ) ay(t )
※灵敏度
单位输入引起输出的变化,即S=△y/△x。 通常用理想直线的斜率作为灵敏度值。(量纲) y △y △x
测试技术 第二章 测试装置的基本特性
四、分辨力
定义: 定义 引起测量装置输出值产生一个可察觉变化的 最小输入量(被测量) 最小输入量(被测量)变化值称为分辨力 表征测量系统的分辨能力 说明: 说明 1、分辨力 --- 是绝对数值,如 0.01mm,0.1g,10ms,…… 、 是绝对数值, , , , 2、分辨率 --- 是相对数值: 、 是相对数值: 能检测的最小被测量的 变换量相对于 满量程的 百分数, 百分数,如: 0.1%, 0.02%
y
(a) 端点连线法 端点连线法: 算法: 检测系统输入输出曲线的两端点连线 算法: 特点: 简单、方便,偏差大, 特点: 简单、方便,偏差大,与测量值有关 (b) 最小二乘法 最小二乘法: 算法: 计算: 算法: 计算:有n个测量数据 (x1,y1), (x2,y2), … , (xn,yn), (n>2) 个测量数据: 个测量数据 , 残差: 残差平方和最小: 残差:∆i = yi – (a + b xi) 残差平方和最小:∑∆2i=min
线性 y 线性 y 非线性y
x
x
x
非线性原因: 非线性原因
外界干扰 温 度 湿 度 压 力 冲 击 振 动 电 磁 场 场
输入 x
检测系统
输入 y = f(x)
摩 擦
间 隙
松 动
迟 蠕 滞 变
变 老 形 化
误差因素
严格的说,很多测试装置是时变的 因为不稳定因素的存 严格的说 很多测试装置是时变的(因为不稳定因素的存 很多测试装置是时变的 但在工程上认为大多数测试装置是时不变线性系统 在),但在工程上认为大多数测试装置是时不变线性系统 但在工程上认为大多数测试装置是 (定常线性系统 该类测试装置的输入与输出的关系可 定常线性系统).该类测试装置的输入与输出的关系可 定常线性系统 用常系数线性微分方程来描述. 用常系数线性微分方程来描述
第4章 测试装置的基本特性(教案)

动态测量—— 被测量本身随时间变化,而测量系统又能准确地跟 随被测量的变化而变化 例:弹簧秤的力学模型
4.3 测试系统的动态特性
无论复杂度如何,把测量装置作为一个系统来看待。问题 简化为处理输入量x(t)、系统传输特性h(t)和输出y(t)三者之 间的关系。
x(t)
h(t)
y(t)
输入量
系统特性
输出
2) H(s)只反映系统传输特性而不拘泥于系统的物理 结构。即具有相似传递函数的不同系统, 物理性质完 全相同。 3)an、bn等系数的量纲将因具体物理系统和输入、 输出的量纲而异。 4) H(s)中的分母取决于系统的结构。
频率响应函数
频率响应函数是在频率域中描述和考察系 统特性的。
与传递函数相比较,频率响应的物理概念 明确,也易通过实验来建立;利用它和传递 函数的关系,由它极易求出传递函数。因此 频率响应函数是实验研究系统的重要工具。
h (t)
s=jω H (ω )
H(s)
3.激励源的选用:正弦信号、阶跃信号和冲击信号。
4.3.3 测试系统动态特性的数学描述
动态特性:测试系统在被测量随时间变化的条件下输入输出 关系
1 测试系统的一般数学描述
(1) 微分方程: 根据相应的物理定律(如牛顿定律、能量守恒定律、 基尔霍夫电路定律等),用线性常系数微分方程表示 系统的输入x与输出y关系的数字方程式
注意:测试装置的静态特性就是在静态测试情况下描述实 际测试装置与理想定常线性系统的接近程度
• • • •
线性度 灵敏度、分辨力 回程误差 零点漂移和灵敏度漂移
4.2.1线 性 度
• 定义:指测量装置输出、输入之间的关系与理想比例 关系的偏离程度;即校准曲线接近拟合直线的程度。
测试装置的基本特性
第二章 测试装置的基本特性一、知识要点及要求1) 了解测试装置的基本要求,掌握线性系统的主要性质;2) 掌握测试装置的静态特性,如线性度、灵敏度、回程误差、稳定度和漂移等; 3) 掌握测试装置的动态特性,如传递函数、频率响应函数、单位脉冲响应函数; 4) 掌握测试装置频率响应函数的测量方法; 5) 掌握一、二阶测试装置的动态特性及其测试。
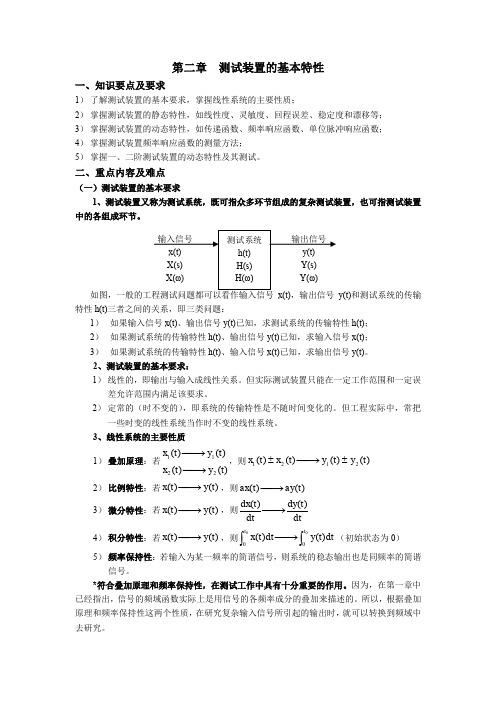
二、重点内容及难点(一)测试装置的基本要求1、测试装置又称为测试系统,既可指众多环节组成的复杂测试装置,也可指测试装置中的各组成环节。
如图,一般的工程测试问题都可以看作输入信号x(t),输出信号y(t)和测试系统的传输特性h(t)三者之间的关系,即三类问题:1) 如果输入信号x(t)、输出信号y(t)已知,求测试系统的传输特性h(t); 2) 如果测试系统的传输特性h(t)、输出信号y(t)已知,求输入信号x(t); 3) 如果测试系统的传输特性h(t)、输入信号x(t)已知,求输出信号y(t)。
2、测试装置的基本要求:1) 线性的,即输出与输入成线性关系。
但实际测试装置只能在一定工作范围和一定误差允许范围内满足该要求。
2) 定常的(时不变的),即系统的传输特性是不随时间变化的。
但工程实际中,常把一些时变的线性系统当作时不变的线性系统。
3、线性系统的主要性质 1) 叠加原理:若)()()()(2211t y t x t y t x −→−−→−,则)()()()(2121t y t y t x t x ±−→−± 2) 比例特性:若)()(t y t x −→−,则)()(t ay t ax −→− 3) 微分特性:若)()(t y t x −→−,则dtt dy dt t dx )()(−→− 4) 积分特性:若)()(t y t x −→−,则⎰⎰−→−0)()(t t dt t y dt t x (初始状态为0)5) 频率保持性:若输入为某一频率的简谐信号,则系统的稳态输出也是同频率的简谐信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章测试装置的基本特性本章学习要求1.建立测试系统的概念2.了解测试系统特性对测量结果的影响3.了解测试系统特性的测量方法为实现某种量的测量而选择或设计测量装置时,就必须考虑这些测量装置能否准确获取被测量的量值及其变化,即实现准确测量,而是否能够实现准确测量,则取决于测量装置的特性。
这些特性包括静态与动态特性、负载特性、抗干扰性等。
这种划分只是为了研究上的方便,事实上测量装置的特性是统一的,各种特性之间是相互关联的。
系统动态特性的性质往往与某些静态特性有关。
例如,若考虑静态特性中的非线性、迟滞、游隙等,则动态特性方程就称为非线性方程。
显然,从难于求解的非线性方程很难得到系统动态特性的清晰描述。
因此,在研究测量系统动态特性时,往往忽略上述非线性或参数的时变特性,只从线性系统的角度研究测量系统最基本的动态特性。
2.1 测试系统概论测试系统是执行测试任务的传感器、仪器和设备的总称。
当测试的目的、要求不同时,所用的测试装置差别很大。
简单的温度测试装置只需一个液柱式温度计,而较完整的动刚度测试系统,则仪器多且复杂。
本章所指的测试装置可以小到传感器,大到整个测试系统。
玻璃管温度计轴承故障检测仪图2.1-1在测量工作中,一般把研究对象和测量装置作为一个系统来看待。
问题简化为处理输入量x(t)、系统传输特性h(t)和输出y(t)三者之间的关系。
常见系统分析分为如下三种情况:1)当输入、输出能够测量时(已知),可以通过它们推断系统的传输特性。
-系统辨识2)当系统特性已知,输出可测量,可以通过它们推断导致该输出的输入量。
-系统反求3)如果输入和系统特性已知,则可以推断和估计系统的输出量。
-系统预测图2.1-2 系统、输入和输出2.1.1 对测试系统的基本要求理想的测试系统应该具有单值的、确定的输入-输出关系。
对于每一输入量都应该只有单一的输出量与之对应。
知道其中一个量就可以确定另一个量。
其中以输出和输入成线性关系最佳。
许多实际测量装置无法在较大工作范围内满足线性要求,但可以在有效测量范围内近似满足线性测量关系要求。
一般把测试系统定常线性系统考虑。
2.1.2 线性系统及其主要性质若系统的输入x(t)和输出y(t)之间的关系可以用常系数线性微分方程来描述a n y(n)(t)+a n-1y(n-1)(t)+…+a1y(1)(t)+a0y(0)(t) =b m x(m)(t)+b m-1x(m-1)(t)+b1x(1)(t)+b0x(0)(t) (2.1-1)则称该系统为线性定常系统。
其中a 0,a 1,…,a n 和b 0,b 1,…,b m 均为常数,既不随时间而变化,也不是自变量x 、因变量y 及它们各阶导数的函数。
一般在工程中使用的测试装置、设备都是线性定常系统。
线性定常系统有下面的一些重要性质:☆ 叠加性系统对各输入之和的输出等于各单个输入所得的输出之和,即若 x 1(t) → y 1(t),x 2(t) → y 2(t)则 x 1(t)±x 2(t) → y 1(t)±y 2(t)☆ 比例性常数倍输入所得的输出等于原输入所得输出的常数倍,即若 x(t) → y(t)则 kx(t) → ky(t)☆ 微分性系统对原输入信号的微分等于原输出信号的微分,即若 x(t) → y(t)则 x’(t) → y’(t)☆ 积分性当初始条件为零时,系统对原输入信号的积分等于原输出信号的积分,即若 x(t) → y(t)则 ∫x(t)dt → ∫y(t)dt☆ 频率保持性若系统的输入为某一频率的谐波信号,则系统的稳态输出将为同一频率的谐波信号,即若 x(t)=Acos(ωt+φx )则 y(t)=Bcos(ωt+φy )线性系统的这些主要特性,特别是符合叠加原理和频率保持性,在测量工作中具有重要作用。
例如,在稳态正弦激振试验时,响应信号中只有与激励频率相同的成分才是由该激励引起的振动,而其它频率成分皆为干扰噪声,应予以剔除。
根据叠加原理和频率保持性,研究复杂输入信号所引起的输出时,就可以转换到频域中去研究,研究输入频域函数所产生的输出的频域函数。
实际上在频域处理问题,往往比较方便和简捷。
2.1.3 有关测试装置的常用术语(学生自学)在今后的讨论中,将会遇到一些常用术语,在此作简单介绍。
此处所指的测试装置,是一个广义的概念,包括上节所示测试系统或环节。
1)量程和测量范围量程 是指测试装置示值范围的上、下之差;测量范围是指该装置在规定的极限误差范围内所能测量的被测量的范围,对于动态测试装置,要给出频率的测量范围。
2)测试装置的误差测试装置的误差 测试装置的指示值与被测量的真值的差值,称为装置的示值误差。
可简称为测试装置的误差。
即示值误差=指示值-真值在实际测量中,被测量的真值是不知道的,通常用实测量的算术平均值或满足规定准确度测量值作为真值。
如用一级精度压力表去检定二级精度压力表,那么一级精度压力表的测量值就作为二级精度的压力真值使用。
引用误差 在实际工作中,常使用反映测试装置质量的最常用的综合性指标是装置的引用误差;即%装置的满量程指示值-真值引用误差=100max 3)测量误差反映测量工作的最常用的一个指标是测量误差,即%真值装置指示值-真值测量误差=100⨯ 若有相同的示值误差,指示值愈小,相应的测量误差愈大。
例如测量100mm 和10mm 长度,如果示值误差都是0.01mm ,显然10mm 的测量误差大,也就是说,它的测量精度低。
因此在选用测试装置时应注意使它的量程与被测量的大小相适应,最好是被测量接近满量程处,至少也要在满量程的以上,才能得到较好测量精度。
4)信噪比信噪比 是信号功率与噪声功率之比,用SNR 表示,它的分贝数为)N n /N s lg(SNR 10=也常用信号电压和噪声电压来表示信噪比,其分贝数为)V n /V s lg(SNR 20=5)准确度准确度 表示测量结果与被测量真值之间的一致程度。
误差越小,测量结果愈准确。
2.2 测试装置的基本特性为了获得准确的测量结果,需要对测量系统提出多方面的性能要求。
这些性能大致包括四个方面的性能:静态特性、动态特性、负载效应和抗干扰特性。
对于那些用于静态测量的测试系统,一般只需衡量其静态特性、负载效应和抗干扰特性指标。
在动态测量中,则需要利用这四方面的特性指标来衡量测量仪器的质量,因为它们都将会对测量结果产生影响。
2.2.1静态特性测量装置的静态特性是通过某种意义的静态标定过程确定的。
静态标定是一个实验过程,这一过程是在只改变测量装置的一个输入量,而其他所有的可能输入严格保持为不变的情况下,测量对应的输出量,因此得到测量装置输入与输出间的关系。
通常以测量装置所要测量的量为输入,得到的输入与输出间的关系作为静态特性。
为了研究测量装置的原理和结构细节,还要确定其他各种可能输入与输出间的关系,从而得到所有感兴趣的输入与输出的关系。
如图2.2-1所示。
第三版P43图2-1测试装置的静态测量误差与多种因素有关,包括测量装置本身和人为的因素。
本章只讨论测量装置本身的测量误差。
有一些测量装置对静态或低于一定频率的输入没有相应,例如压电加速度计。
这类测量装置也需要考虑诸如灵敏度等类似于静态特性的参数,此时则是以特定频率的正弦信号为输入,研究其灵敏度。
这种特性称为稳态特性。
2.2.2动态特性测试装置的动态特性是当被测量即输入量随时间快速变化时,测量输入与相应输出之间动态关系的数学描述。
在研究测量装置动态特性时,往往认为系统参数是不变的,并忽略诸如迟滞、死区等非线性因素,即用常系数线性微分方程描述测量装置输入与输出间的关系。
测量装置的动态特性也可用微分方程的线性变换描述,采用初始条件为零的Laplace 变换可得到传递函数,采用初始条件为零时Fourier 变换可得频响函数。
此外,测量装置的动态特性也可用单位脉冲输入的响应来表示。
测量装置的微分方程a n y (n)(t)+a n-1y (n-1)(t)+…+a 1y (1)(t)+a 0y (0)(t) =b m x (m)(t)+b m-1x (m-1)(t)+b 1x (1)(t)+b 0x (0)(t)(2.2-1) 传递函数(2.2-2)频响函数 aj a j a j a b j b j b j b j X j Y j H n n n n m m m m 01110111)()()()()()()()()(++++++++==----ωωωωωωωωωΛΛ (2.2-3)脉冲响应函数(后面介绍)在测量装置动态特性建模中,常常使用静态标定得到的灵敏度等常数。
然而,在某些情况下动态灵敏度不同于静态灵敏度,在要求高的动态特性精度时,则需要深入考虑这些问题。
确定测量装置动态特性的目的是为了了解其所能实现的不失真测量的频率范围。
2.2.3负载特性当传感器安装到被测物体上或进入被测介质,要从物体与介质中吸收能量或产生干扰,使被测物理量偏离原有的量值,从而不可能实现理想的测量,这种现象称为负载效应。
这种效应不仅发生在传感器与被测物体之间,而且存在于测量装置的上述各环节之间。
测量装置的负载特性是其固有特性,在进行测量或组成测量系统时,要考虑这种特性并将其影响降到最小。
2.2.4抗干扰特性测量装置在测量过程中要受到各种干扰,包括电源干扰、环境干扰(电磁场、声、光、温度、振动等干扰)和信道干扰。
这些干扰的影响决定于测量装置的抗干扰性能,并且与所采取的抗干扰措施有关。
对于多通道测量装置,理想的情况应该是各通道完全独立的或完全隔离的,即通道间不发生耦合与相互影响。
实际上通道间存在一定程度的相互影响,即存在通道间的干扰。
因此,多通道测量装置应该考虑通道间的隔离性能。
2.3 测试系统的静态响应特性如果测量时,测试装置的输入、输出信号不随时间而变化,则称为静态测量。
静态测量时,测试装置表现出的响应特性称为静态响应特性。
表示静态响应特性的参数,主要有灵敏度、非线性度和回程误差。
为了评定测试装置的静态响应特性,通常采用静态测量的方法求取输入-输出关系曲线;作为该装置的标定曲线。
理想线性装置的标定曲线应该是直线,但由于各种原因,实际测试装置的标定曲线并非如此。
因此,一般还要按最小二乘法原理求出标定曲线的拟合直线。
2.3.1非线性度标定曲线与拟合直线的偏离程度就是非线性度。
若在标称(全量程)输出范围A 内,标定曲线偏离拟合直线的最大偏差为B (图2.3-1 a 所示),则定义非线性度为非线性度=(B/A)×100% (2.3-1)拟合直线该如何确定,目前国内外还无统一的标准。
较常用的是最小二乘法。
图2.3-1 测试系统误差与灵敏度最小二乘法在许多实际问题中,往往需要根据实验测得两个变量x 与y 的若干组实验数据(x 1,y 1),…(x n ,y n )来建立这两个变量的函数关系的近似式,这样得到的函数近似式称为经验公式。