K60-flash-FMC(中文)
BenQ K60 说明书

用户手册版权和商标明基电通有限公司 2010 年版权所有,并保留所有权利。
未经本公司事前书面之许可,本文的任何部分皆不得以任何形式或任何方法,包括电子、机械、磁性、光学、化学、手写或任何方式予以重制、传输、转译、储存于检索系统或翻译成任何文字或计算机语言。
要获得最新的用户手册,请访问。
本手册中提及的所有其它标志、产品或公司名称可能是其各自相应公司的注册商标或版权,在此仅作信息参考用途。
免责声明对于本文之任何明示或默示内容,明基电通有限公司不做任何保证,亦拒绝对任何特殊目的之商用性或适用性目的予以保证。
此外,明基电通有限公司保留修改或变更本文之权利,并且修改或变更内容将不另行通知。
因安装了非原厂软件、部件和/ 或非原装附件而导致的问题(例如数据丢失和系统故障),所有责任由用户自行承担。
目录简介 (8)快速入门 (9)为设备充电 (9)设备开机 (10)熟悉设备 (11)正面 (11)背面 (15)使用触摸屏 (16)点击 (16)滑动 (17)移动 (19)屏幕方向 (20)使用软键盘 (20)主要功能简介 (22)我的书柜 (24)书籍排序 (25)阅读书籍 (26)选择阅读模式 (26)屏幕缩放 (27)使用选项菜单 (29)书签和注记 (31)添加书签和作注记 (31)查看书签和注记 (32)删除书签 (33)删除或编辑注记 (34)删除书籍 (34)显示书籍信息 (34)跳至指定页 (35)显示目录 (35)调整屏幕方向 (36)我的注记 (37)档案总管 (38)图片 (39)配置播放设置 (40)幻灯片方式播放 (41)缩放图片 (43)音乐 (44)播放音频文件 (45)书城 (47)设置 (48)Wi-Fi 设置 (49)开启 Wi-Fi (49)连接到可用网络 (50)添加新连接 (52)语言 (53)当前日期和时间 (53)屏幕保护 (54)连接计算机 (54)高级设置 (55)软件升级 (55)恢复默认设置 (55)装置状态 (55)输入法 (56)用户手册 (57)常见问题和故障排除 (58)电池和电源 (58)连接 (60)系统 (61)显示屏 (63)带孔 (64)清洁与电池维护 (67)电池维护 (67)清洁 nReader (67)服务与支持 (68)BenQ nReader 全球在线服务 (68)规格 (69)附录 (71)一般安全信息 (71)有关电池的安全信息 (72)有关电源的安全信息 (72)有关无线网络的安全信息 (73)安全预防措施 (73)简介感谢您选用 nReader。
K60(Rev6-Ch55-TSI)(中文)
第55 章触屏输入(Touch senseinput ,TSI)55.1 引言触摸感应输入(TSI)模块具有高灵敏和强鲁棒性的电容触摸感应检测能力。
通过独立的可编程的检测阈值和结果寄存器,TSI模块可以完成电容的测量。
TSI 模块在带有超低电流加法的低功耗模式下运行,能以一个触摸事件唤醒CPU。
它是一种稳定的电容测量模块,能够实现键盘触摸,旋转和滑动。
55.2 特点(1)具有多达16个输入的电容触摸感应式引脚和独立结果寄存器(2)具有可编程的阈值上下限,自动检测电极电容量的改变(3)在运行模式和低功耗模式下,自动周期扫描单元会有不同的占空比(4)为了实现键盘触摸,旋转,滑动,完全支持FSL触摸感应SW库(TTS)。
(5)运行在所有低功耗模式下:Wait, Stop, VLPR, VLPW, VLPS,LLS,VLLS{3,2,1}(6)能够从低功耗模式中唤醒MCU(7)配置中断:a.扫描结束中断或者超出范围中断b.TSI错误中断:电极板和VDD/VSS短路或者转换运行超时(8)补充温度和提供电压变化(9)在低功耗模式下,支持不需要外部晶体的操作,(10)每个电极电容量测量可以整合从1到4096次(11)可编程的电极振荡器和TSI参考振荡器可以实现模块灵敏度高,扫描时间短和功耗低的功能(12)在不需要外部硬件时,实现每个电极电容测量只需要使用一个引脚55.3 总述这部分是对TSI模块的总述。
下图给出了简化了的TSI模块结构图。
图55-1 触摸感觉输入结构图55.3.1 电极电容测量单元电极电容测量单元能感应一个TSI引脚的电容量变化和输出一个16位结果。
这个模块基于双振荡器架构。
其中一个振荡器和外部电极阵列连接,根据电极电容器震荡;而其他振荡器则根据内部参考电容器进行振荡。
在可配置的外部电极振荡器振荡期间,参考振荡器的周期计数值可以衡量引脚的电容量。
图55-2 TSI电容衡量单元结构图为了适应电极电容量的不同大小,电极振荡器使用一个可编程的电流源对引脚电容进行充电和放电,该电流源由SCANC[EXTCHRG]位进行选择。
k60在KEIL中的使用手册
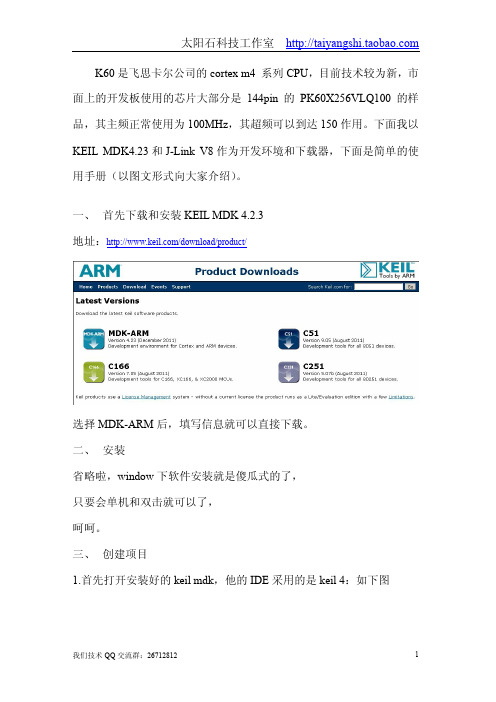
K60是飞思卡尔公司的cortex m4系列CPU,目前技术较为新,市面上的开发板使用的芯片大部分是144pin的PK60X256VLQ100的样品,其主频正常使用为100MHz,其超频可以到达150作用。
下面我以KEIL MDK4.23和J-Link V8作为开发环境和下载器,下面是简单的使用手册(以图文形式向大家介绍)。
一、首先下载和安装KEIL MDK4.2.3地址:/download/product/选择MDK-ARM后,填写信息就可以直接下载。
二、安装省略啦,window下软件安装就是傻瓜式的了,只要会单机和双击就可以了,呵呵。
三、创建项目1.首先打开安装好的keil mdk,他的IDE采用的是keil4:如下图2.选择项目菜单Project,点击New uVision Project。
3.选择存储路径,写好项目名称test,点击保存。
4.选择CPU型号,我们这里使用的是飞思卡尔公司的MK60系列CPU,所以我们选择如下图所示。
5.点击ok,点击是。
出现如下图所示,其中startup_MK60DZ10.s为K60系列CPU的启动文件的汇编源代码。
6.设置J-LINK下载器,点击Flash中的Configure Flash Tool…如图所示。
(1)、Utilties选项卡中的Use Taget Driver for Flash Programming选择Cortex-M/R J-LINK/J-Trace。
(2)、Debug选项卡中的Use选择Cortex-M/R J-LINK/J-Trace。
(3)、C/C++选项卡中的Include Paths点击后面按钮。
添加K60头文件路径C:\Keil\ARM\INC\Freescale\Kinetis。
红色为安装目录。
7.下面我们新建个文件,点击File中的New,然后保存为main.c。
然后右键Source Group1添加TYS_system_k60.c和main.c文件到项目中。
k60介绍(中文)

第2章简介2.1 概要本章提供了Kinetis组合和K60系列产品的概述。
同时,本章提供了本文件所包涵设备的高水准的描述。
2.2 Kinetis组合Kinetis是低功耗可扩展和在工业上使用混合信号ARM®Cortex™-M4系列MCU的最好的组合。
第一部分介绍超过200引脚、外围设备和软件兼容性的5个MCU系列。
每个系列提供了优良的性能,与普通外设内存,内存映射,并提供内部和系列之间轻松迁移包和功能可扩展性。
Kinetis MCUs使用了飞思卡尔的新的90nm带有独特FlexMemory的薄膜存储器(TFS)闪存技术。
Kinetis系列MCU结合了最新的低功耗革新技术和高性能,高精密混合信号功能与连通,人机界面,安全及外设广泛。
Kinetis MCUs使用了飞思卡尔和ARM第三方合作伙伴的市场领先的捆绑模式。
表示低功耗混合信号USB 段LCD以太网加密和篡改检测DDR所有Kinetis系列都包涵强大的逻辑、通信和时序阵列和带有伴随着闪存大小和I/O数量的集成度等级的控制外围部件。
所有的kinetis系列包涵一下共同特征:· 内核:· ARM Cortex-M4内核提供1.25 DMIPS / MHz的DSP指令(浮点单元在kinetis系列可用)。
· 高达32位的DMA,同时尽可能减小CPU干预。
· 提供50MHz、72MHz和100MHz几种CPU频率(120MHz和150MHz在kinetis可用)。
· 超低功耗:· 10种低功耗操作模式通过优化外设执行和唤醒时间来延长电池寿命。
· 为了增加低功耗的灵活性,增加了低漏唤醒单元、低功耗定时器和低功耗RTC。
· 业界领先的快速换醒时间。
· 内存:· 从32 KB闪存/ 8 KB的RAM可扩展为1 MB闪存/128 KB的RAM。
同时使空白的独立闪存执行代码和固件更新。
K60快速使用手册

K60核心开发板快速使用说明1、K60连接方式:K 60的JTAG的10pin线插接方式,miniUSB也是要插上去的,送的miniUSB是供电给K60的转接板的插线方式,10pin是连接K60的,20pin是连接Jlink V8或者ulink2的标准JTAG接口K60和JlinkV8连接后的图K60和JlinkV8连接后的图如果要查看串口的输出信息,可以使用TTL转串口的板子,例程的串口使用的是K60的串口3,串口3可以输出很多调试信息和例程的相关信息。
K60板子上的插针C16和C17就是串口的RXD和TXD。
波特率是115200K60核心板供电方式可以使用USB接口供电,也可以使用插针位置供电,请注意插针位置供电的选择:2开发软件的安装:Kinetis_K60(客户资料)\开发软件这个文件夹下有相关的开发软件,一般推荐IAR开发软件。
IAR-EWARM-EV-CD-6307安装这个开发软件IAR_Kegen_PartB,这个是注册机,用来生成IAR的注册码的,win7下使用的时候的,请使用管理员模式运行,否则无法生成正确的注册码。
例如图中已经生成了一个注册码使用注册机的时候,第一步:先选择对应版本的IAR软件,第二步,点获取注册码,然后根据顺序,将生成的license number复制后,粘贴到IAR的安装要求输入对话框中,下一步将生成的license key复制,贴到IAR的安装下一步要求输入对话框中,继续点下一步完成安装。
注意:win7下使用的时候的,请使用管理员模式运行,否则无法生成正确的注册码。
我们的开发例程都是IAR的请先安装IAR软件,IAR软件在光盘我们已经配备了\Kinetis_K60-100(客户资料)\开发软件工具\IAR开发软件及注册机在这里找到要安装IAR软件:IAR-EWARM-EV-CD-6307启动后,选择如下图所示的目录,启动IAR软件的安装。
启动安装后,直接点“next”就行了。
逐飞科技K60库配置信息

库默认的内核频率为150M (超频),总线频率为75M ,flash 频率为25M 。
默认频率使用150M 目的在于总钻风摄像头可以实现无黑边图像采集。
如果不需要超频到150M 可以到system_MK60D10.c 文件修改SYSCLK_MODE 的值为0即可。
接下来进行工程的配置右击工程(也就是图中1所在的方框),然后选择options 。
第一步检查,单片机的型号选择是否正确,根据自己使用的单片机进行选择,当然如果使用的单片机不是例程所支持的话,那么这里设置为自己使用的单片机例程也无法使用的。
下图展示了如何选择单片机型号,这里需要注意的是,由于飞思卡尔公司被NXP 收购了,因此在新版中没有freescale 选项了,freescale 公司的单片机归纳在了NXP 选项下面了。
将char 释意成有符号的类型,这个如果有特殊需求的可以按照自己的需求设置,一般用户按照图中设置即可。
S EE KF R E E路径包含信息与宏定义设置 包含目录信息$PROJ_DIR$\..\..\USER\inc $PROJ_DIR$\..\..\USER\src$PROJ_DIR$\..\..\..\Libraries\startup\CoreSupport$PROJ_DIR$\..\..\..\Libraries\startup\DeviceSupport\IAR-ARM $PROJ_DIR$\..\..\..\Libraries\startup\DeviceSupport $PROJ_DIR$\..\..\..\Libraries\drives\inc $PROJ_DIR$\..\..\..\Libraries\seekfree $PROJ_DIR$\..\..\..\Libraries\FatFs $PROJ_DIR$\..\..\..\Libraries\FatFs\option宏定义信息(这里的宏定义用于预编译处理)_DLIB_FILE_DESCRIPTOR$PROJ_DIR$\linker\MK60xN512_10.icfS EE KF R E ESEEKFREE。
K60系统时钟模块

14.2 电源管理模块
电源模式组成
电源管理控制器为用户提供了多达10种电源模式。分别是: RUN、WAIT、VLPR、VLPW STOP、VLPS、LLS、VLLS3、VLLS2、 VLLS1。
电源模式功能 • 1 电源模式切换
任意时刻的芯片复位都会使芯片转到正常的运行状态。 在运行、等待和停止模式的不同转换过程中,必须开启电 源调节器的功能。
系统时钟功能(续)
SIM模块能对系统的各种时钟进行配置,它的SCGCx寄 存器可以对每个模块的时钟进行单独的开启和关闭,该寄 存器在复位时被清零,从而使得相应模块的时钟被关闭。
14.1 时钟系统
时钟系统的框图
14.1 时钟系统
时钟设置方法 对时钟的设置,必须满足一定的要求。 1)内核和系统时钟频率必须在 100MHz以内。 2)总线时钟频率不大于50MHz,且必 须是内核时钟的整数分频。 3)Flash模块时钟频率不大于25MHz, 且必须是总线时钟的整数分频。 4)FlexBus时钟频率不大于总线时钟。
14.3 端口控制与中断模块
端口控制与中断模块简述
端口控制与中断模块支持外部中断、数字滤波和端口 控制等功能。
端口控制
若启动端口功能,端口的数字滤波器功能在所有数字 引脚复用功能有效。 对于32位的端口的每个引脚都可以独立地配置其功能。 同一端口的所有数字滤波器以时钟为单位的滤波带宽 相同, 只有当这个端口的数字滤波器功能被禁用时才能 更改带宽值。
14.4 看门狗
计算机正常运行(COP)看门狗
当应用软件与期望的运行不相符时,COP看门 狗试图强制系统复位。 任何复位之后,COP计数器都会被激活。 服务于(清除)COP计数器的写SRS操作不应 被放置在中断服务例程(ISR)中,因为即使主要 的应用程序失败,ISR也可能继续被周期地执行。 当MCU在激活后台模式,COP计时器暂时停用。
飞思卡尔K60入门资料课件

将JTAG调试器连接到计算 机,并下载和安装相应的 驱动程序。
打开Keil MDK-ARM软件 ,创建一个新项目,选择 正确的芯片型号(K60), 并配置项目属性,如工作 空间、工具链等。
使用串口通信线将开发板 与计算机连接起来,以便 在开发过程中进行调试和 数据传输。
使用Keil MDK-ARM软件 编写代码,并进行编译和 调试。
K60在图像处理中的应用
K60芯片具有高速的图像处理能力,可以用于实现各种图像处理算 法,如图像增强、目标检测、人脸识别等。
图像处理实例代码
提供一些基于K60芯片的图像处理实例代码,包括图像增强、目标 检测等。
通信系统实例
通信系统概述
通信系统是实现信息传输和交换的技术体系,包括无线通信、有 线通信、卫星通信等。
软件问题及解决方案
总结词
软件问题通常涉及到编程环境、编译错误、烧录程序等,需要检查软 件配置和代码错误。
编程环境配置
确保你使用的编程环境(如IAR Embedded Workbench、Keil uVision等)已正确配置,包括驱动程序安装、工具链设置等。
编译错误
检查代码是否有语法错误或逻辑错误,仔细阅读编译器给出的错误提 示,定位并修复问题。
K60在通信系统中的应用
K60芯片具有高速的通信接口和强大的数据处理能力,可以用于实 现各种通信系统,如无线通信网络、卫星通信系统等。
通信系统实例代码
提供一些基于K60芯片的通信系统实例代码,包括无线通信网络协 议栈的实现、卫星通信系统的数据处理等。
05
K60芯片常见问题及解决方案
硬件问题及解决方案
开发环境常见问题及解决方案
1. Keil MDK-ARM软件安装问题:确保从官方网 站下载正确的版本,并按照安装向导进行操作。 如果遇到问题,可以查阅Keil官方文档或寻求技 术支持。
K60功能介绍
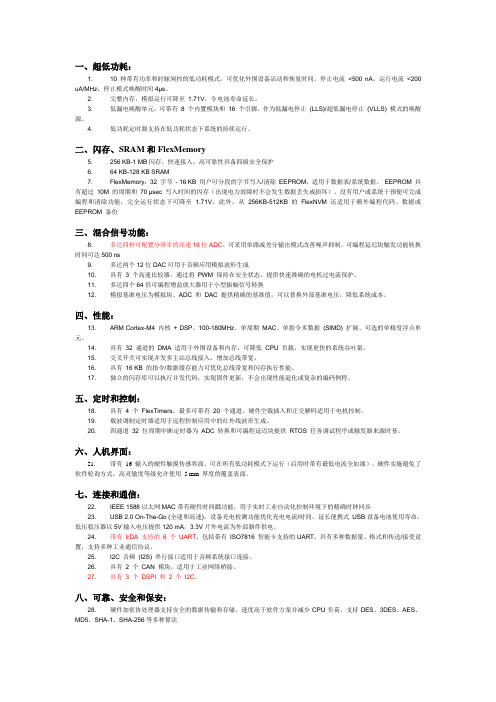
一、超低功耗:1. 10 种带有功率和时脉闸控的低功耗模式,可优化外围设备活动和恢复时间。
停止电流<500 nA,运行电流<200 uA/MHz,停止模式唤醒时间4μs。
2. 完整内存,模拟运行可降至1.71V,令电池寿命延长。
3. 低漏电唤醒单元,可带有8 个内置模块和16 个引脚,作为低漏电停止(LLS)/超低漏电停止(VLLS) 模式的唤醒源。
4. 低功耗定时器支持在低功耗状态下系统的持续运行。
二、闪存、SRAM和FlexMemory5. 256 KB-1 MB闪存。
快速接入、高可靠性具备四级安全保护6. 64 KB-128 KB SRAM7. FlexMemory:32 字节- 16 KB 用户可分段的字节写入/清除EEPROM,适用于数据表/系统数据。
EEPROM 具有超过10M 的周期和70 μsec 写入时间的闪存(出现电力故障时不会发生数据丢失或损坏)。
没有用户或系统干预便可完成编程和清除功能,完全运行状态下可降至 1.71V。
此外,从256KB-512KB 的FlexNVM 还适用于额外编程代码、数据或EEPROM 备份三、混合信号功能:8. 多达四种可配置分辨率的高速16位ADC。
可采用单路或差分输出模式改善噪声抑制。
可编程延迟块触发功能转换时间可达500 ns9. 多达两个12位DAC可用于音频应用模拟波形生成10. 具有3 个高速比较器,通过将PWM 保持在安全状态,提供快速准确的电机过电流保护。
11. 多达四个64倍可编程增益放大器用于小型振幅信号转换12. 模拟基准电压为模拟块、ADC 和DAC 提供精确的基准值,可以替换外部基准电压,降低系统成本。
四、性能:13. ARM Cortex-M4 内核+ DSP。
100-180MHz、单周期MAC、单指令多数据(SIMD) 扩展、可选的单精度浮点单元。
14. 具有32 通道的DMA 适用于外围设备和内存,可降低CPU 负载,实现更快的系统吞吐量。
k60 舵机控制
k60 舵机控制第一章:引言舵机是一种常见的电动机械设备,用于控制机械系统的位置和方向。
它在自动化系统、机器人技术和无人驾驶等领域得到了广泛应用。
舵机的控制主要涉及到控制信号的生成和舵机电机的驱动。
近年来,K60控制器在舵机控制中得到了广泛应用。
本文将研究和分析K60控制器在舵机控制中的应用,并进行实验验证。
第二章:K60控制器的原理与实现2.1 K60控制器的基本原理K60控制器是一种高性能的嵌入式系统,具有强大的计算和通信能力。
它采用ARM Cortex-M4内核,配备了丰富的外设接口,可以用于舵机控制、传感器接口和通信等应用。
K60控制器通过中断、定时器和GPIO等功能来生成控制信号,并驱动舵机电机。
2.2 K60控制器在舵机控制中的应用K60控制器可以通过PWM(脉宽调制)信号来控制舵机电机的位置和方向。
PWM信号是一种周期性的方波信号,通过改变方波的高电平时间和低电平时间来改变舵机电机的输出位置。
K60控制器可以根据输入的控制信号,通过调节PWM信号的占空比来控制舵机的转动角度。
此外,K60控制器还支持多路PWM输出,可以同时控制多个舵机电机。
第三章:实验与结果分析3.1 实验设计本实验设计了一个简单的舵机控制系统,使用K60控制器和舵机电机,通过改变控制信号来控制舵机的转动角度。
实验中,分别测试了不同的舵机控制信号和PWM占空比对舵机转动角度的影响。
3.2 实验结果分析实验结果表明,K60控制器可以有效地生成舵机的控制信号,并驱动舵机电机实现预期的转动角度。
同时,PWM占空比的改变可以精确地控制舵机电机的位置和方向。
实验还发现,使用K60控制器可以同时控制多个舵机电机,实现复杂的动作控制。
第四章:总结与展望4.1 总结本文研究了K60控制器在舵机控制中的应用,并设计了一系列实验验证了其有效性和可行性。
实验结果表明,K60控制器可以实现精确的舵机控制,并具有较强的扩展性和稳定性。
4.2 展望尽管K60控制器在舵机控制中已经取得了不错的成果,但仍有一些挑战需要克服,例如动力系统的稳定性和控制算法的优化。
K60(Rev6-Ch25-OSC)(中文)
第25章振荡器(Oscillator,OSC)25.1 概述OSC模块是一个晶体振荡器,此模块同一个外部石英晶体或谐振器相连,为MCU产生一个参考时钟。
注意:关于此模块的特定芯片实现实例详情请参见芯片配置章节。
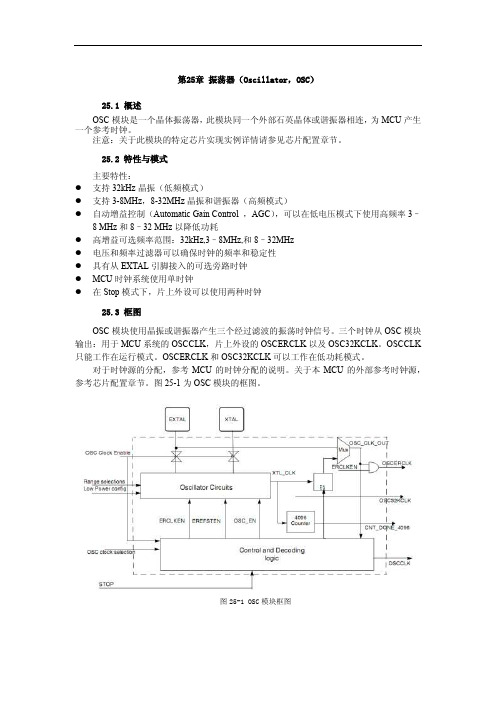
25.2 特性与模式主要特性:●支持32kHz晶振(低频模式)●支持3-8MHz,8-32MHz晶振和谐振器(高频模式)●自动增益控制(Automatic Gain Control ,AGC),可以在低电压模式下使用高频率3–8 MHz和8–32 MHz以降低功耗●高增益可选频率范围:32kHz,3–8MHz,和8–32MHz●电压和频率过滤器可以确保时钟的频率和稳定性●具有从EXTAL引脚接入的可选旁路时钟●MCU时钟系统使用单时钟●在Stop模式下,片上外设可以使用两种时钟25.3 框图OSC模块使用晶振或谐振器产生三个经过滤波的振荡时钟信号。
三个时钟从OSC模块输出:用于MCU系统的OSCCLK,片上外设的OSCERCLK以及OSC32KCLK。
OSCCLK 只能工作在运行模式。
OSCERCLK和OSC32KCLK可以工作在低功耗模式。
对于时钟源的分配,参考MCU的时钟分配的说明。
关于本MCU的外部参考时钟源,参考芯片配置章节。
图25-1为OSC模块的框图。
图25-1 OSC模块框图25.4 OSC信号说明25.5 外部晶振/谐振器连接晶振/谐振器频率的引用连接如表25-2所示。
当使用低频率,低功耗模式时,唯一的外部部件就是晶振或陶瓷谐振器本身。
在其它振荡器模式中还需要负载电容(Cx,Cy)和反25.6 外部时钟连接在外部时钟模式,引脚连接如图25-6所示。
注意:当GPIO替换功能配置成外部时钟连接时,XTAL可以用作GPIO。
25.7 存储器映射/寄存器定义一些振荡器模块寄存器位通常被复用到其他模块中,例如MCG或SIM。
25.7.1 OSC Control Register (OSC_CR)注意:在OSC被使能并且开始产生时钟之后,其它配置如低功耗和频率范围就不能被修改了。
K60各模块入门培训教程

北京理工大学智能车俱乐部程序培训K60各模块入门前言这个小文档是对k60单片机的各模块进行了初步的介绍,以便大家在之后车队的k60实际培训演示中能更好地理解,能更快的上手单片机,另外说一下车队用的K60单片机型号是MK60DN512ZVLL10,不同型号的k60单片机各模块基本操作有些小区别。
本文档是基于给大家实际演示的各模块功能来撰写的,里面讲的各个模块在以后的做车过程中基本上都会用到。
实际上一个智能车上所实现的功能都是由这些最基本的小模块组合而成的,把这些小模块各个击破了,都理解了,以后看智能车的整体程序也就容易得多了~另外注意:在我没实际操作讲解之前,大家看这些模块的时候可以不用纠结一些细节的问题,大致有个概念即可~在我讲的时候好好听我讲各个模块的例程,做好笔记,然后看实验现象,进行进一步的理解。
之后自己再回去仔细看例程、笔记和这个文档,并且自己可以对程序进行一些改动,然后烧写程序看现象仔细研究。
PS:我们第十届包括之前的学长们都没有进行这样专门的比较系统的单片机各模块的培训,也没有学长们亲自给我们写这些入门的学习文档,基本都是自己去查资料学习,所以你们这一届算是很走运的了!不要错失良机不好好学习哦~话说回来,毕竟车队是一年比一年进步嘛,培训会慢慢地变得更加有条理!还有你们明年培训下一届的时候也是哦学完了单片机各个模块后,以后你们要是想对车进行哪个模块的调试不会出现不知道程序在哪、不知道怎样去调试这些最基本、较Low的问题~你们对各个模块理解透了,智能车整体的程序架构你们会轻而易举的掌握。
以后想调那个模块调哪个,整个程序也不会乱,以后要在车上增加新模块新功能也会容易得多!所以......仓鼠们打起精神~好好学吧!!!第十届摄像头游清目录一、GPIO模块 (5)1、GPIO概述 (5)2、I/O口的使用方法 (6)二、FTM占空比(PWM)模块 (9)1、PWM概述 (9)2、PWM程序讲解 (10)三、中断模块 (13)1、中断概述 (13)2、GPIO(I/O)口外部中断 (13)2.1I/O口外部中断概述 (13)2.2I/O口外部中断程序讲解 (14)3、PIT定时器中断 (16)3.1PIT定时器中断概述 (16)3.2PIT定时器中断程序讲解 (16)四、A/D(模数)转换模块 (18)1、A/D模块概述 (18)2、A/D模块程序讲解 (19)五、串口通信(UART)模块 (21)1、串口(UART)模块概述 (21)1、串口(UART)模块程序讲解 (22)后记 (25)一、GPIO模块车队用的K60单片机有100个引脚,如下图:其中大部分引脚有GPIO模块的功能,GPIO模块可以输出指定的高低电平,或读入输入电平,在实际智能车上可以用于调试用的小灯、蜂鸣器、拨码开关和摄像头信号数据采集及外部中断等。
Ch06-RstBoot(k60中文)

第六章复位和启动6.1 简介MCU支持的复位源有:表6-1 复位源除了EzPort和MDM-AP复位之外,每个系统复位源在系统复位状态寄存器(SRSH和SRSL)都有相应的位。
详见模式控制器一章。
EZP_引脚决定的功能模式下选择单片(默认)模式或串行flash编程MCU在CS(EzPort)模式而退出复位状态。
详见启动选项。
6.2 复位此部分讨论基本的复位机制和复位源。
一些引发复位的模块可以配置为触发中断。
参见各独立外设章节获取更多信息。
6.2.1 上电复位(POR)当给MCU上电或提供的电压低于上电复位重置电压(V POR)时,POR电路会触发POR 复位。
当电压升高时,LVD电路保持MCU处于复位状态直到电压大于LVD低电压阈值(V LVDL)。
POR复位后SRSL寄存器的POR和LVD位亦重设。
6.2.2 系统复位MCU复位是一种可以使芯片回到初始状态的方法。
系统复位起始于全面监管的片上调节器和来自于内部参考的系统时钟发生器。
当芯片退出复位时,它按如下顺序操作:·从中断向量表0偏移开始读取开始SP(SP_main)·从中断向量表4偏移开始读取PC·LR设置为0xFFFF_FFFF片上外设模块和非模拟IO引脚最初都被置为禁止。
复位之后模拟引脚被默认为相应的模拟功能。
复位时,JTAG相应的输入引脚被配置为:·TDI上拉(PU)·TCK下拉(PD)·TMS上拉相应的输出引脚被配置为:TDO既不上拉也不下拉注意到nTRST初始被配置为禁止的,然而一旦被配置为JTAG功能时,它的相应输入引脚被配置为:·nTRST上拉6.2.2.1 外部引脚复位(PIN)RESET是一个专用引脚。
该引脚开漏和内部上拉。
RESET将芯片从任何模式唤醒。
在该引脚复位时,SRSL[PIN]被置位。
6.2.2.1.1复位引脚过滤RESET引脚在所有的模式中都支持数字过滤。
野火K60板子使用说明
2012野火K60板子使用说明野火Kinetics 开发板教程最适合初学者入门Kinetis的教程freescale作者:野火野火嵌入式开发工作室野火K60板子使用说明目录野火K60板子使用说明 (1)目录 (1)K60板子与jlink转接板的连接 (2)板子供电方式 (2)Jlink供电 (3)PWM 驱动电机 (4)IO口能否输入5V电压? (4)最多可以输出多少个不同频率的 PWM? (5)K60在线调试查看变量值 (5)K60板子与jlink转接板的连接线两端都朝外接,一头接核心板,一头接转接板。
转接板直接插入jlink,不需要经过20pin的排线。
板子供电方式我们的板子,供电方式可选3种方法:5V供电,3V3供电,Jlink供电。
三种方式,可以任意选其中一种。
其中,5V供电,有两种5V转3V3方式,一种是利用外部的LDO芯片来转,默认不焊接的。
另外一种是利用K60内部自带的LDO来转。
(不要以为我们没有焊接外部LDO芯片就以为不支持5V供电)。
另外还有一个1.5V供电,是用于供电给RTC模块。
Jlink供电Jlink本身不供电,需要改装后才能供电。
我们发货时,是不会对jlink进行改装。
需要你们自行改装。
短接图上红色的两个孔就可以。
PWM 驱动电机Kinetis单片机输出PWM只有3.3V,不能驱动电机,需要转换电路。
方法由网友 dyt3020 提供:/thread-96566-1-1.html1.可用电平转换芯片 3.3-5v ,74 系列的 244、2452.可用三极管来转换电平。
成本最低电路做的不匹配的话有时还需要加个小电容3.用光耦隔离这样效果最好干扰基本没有也不会损坏单片机电磁组首选当然成本也高些要用高速光耦三极管电路图:IO口能否输入5V电压?支持,官方的资料里说的:最多可以输出多少个不同频率的 PWM?Kinetis 单片机,用 FTM 模块来输出 PWM 脉冲波,而同一个 FTM 模块,只能设置一个频率。
k60

• • • • •
通用寄存器R0~R12 堆栈指针R13 连接寄存器R14(LR) 程序计数寄存器R15 特殊功能寄存器(程序状态字、中断、控 制)
• 串行外设接口(SPI,Serial Peripheral Interface) 是Freescale公司推出的一种同步串行通讯接口, 用于微处理器和外围扩展芯片之间的串行连接。 SPI全双工主--从连接,四线同步传输。从机,主 机(串行时钟)。主入从出 ,主出从如。低功耗 模式。选择从机:主机将该从机的选择线拉低。 • I2C:在硬件上,二线制的I2C串行总线使得各IC 只需最简单的连接,而且总线接口都集成在IC中, 不需另加总线接口电路。支持多主控。主机提供 时钟信号,每个设备有独立地址。采用了独特的 寻址约定,规定了起始信号后的第一个字节为寻 址字节,用来寻址被控器件,并规定数据传送方 向。半双工。
• 控制器局域网CAN(Controller Area Network):CAN网络上的任何一个节点均 可作为主节点主动地与其他节点交换数据; CAN网络节点的信息帧可以分出优先级, 这为有实时性要求的控制提供了方便; CAN的物理层及数据链路层有独特的设计 技术,使其在抗干扰以及错误检测等方面 的性能大大提高。
K60可选择的芯片类型
芯片类型 CPU频 率 (MHz) 100 100 100 100 100 100 引脚 数 封装 Flash容 量(KB) 程序空间 (KB) EEPRO M(KB) SRAM(K B) GPIO
MK60N256VLQ100 MK60X256VLQ100 MK60N512VLQ100 MK60N256VMD100 MK60X256VMD100 MK60N512VMD100
144 144 144 144 144 144
K60固件库
-1文件版本:V2.4
超核电子
中国石油大学(华东)
(如有不详之处请参考源文件代码)
目
目 1.
录
KinetisK 系列固件库户手册................................................................................................. - 1 录..................................................................................................................................- 2 文档和库规范.................................................................................................................. 10 1.1 缩写................................................................................................................................ 10 1.2 命名规则........................................................................................................................ 10 1.3 编码规则........................................................................................................................ 11 1.3.1 变量......................................................................................................................... 11 1.3.2 布尔型..................................................................................................................... 11 1.3.3 功能状态类型........................................................................................................ 12 2. 固件函数库......................................................................................................................... 12 2.1 压缩包描述.................................................................................................................... 12 2.1.1 文件夹 FWLIB..........................................................................................................12 2.1.2 文件夹 HARDWARE................................................................................................ 12 2.1.3 文件夹 STARTUP..................................................................................................... 12 2.1.4 文件夹 USER........................................................................................................... 13 2.2 外设的初始化和设置................................................................................................... 13 2.3 位段(Bit-Banding).................................................................................................... 14 2.3.1 映射公式................................................................................................................ 14 2.3.2 应用实例................................................................................................................ 14 2.4 运行时间检测............................................................................................................... 15 3. 外设固件概述..................................................................................................................... 17 4. 通用输入输出模块(GPIO).............................................................................................. - 18 4.1 GPIO 模块主要寄存器结构...................................................................................... - 18 4.2 GPIO 库函数.............................................................................................................. - 18 4.2.1 GPIO_Init............................................................................................................. - 18 4.2.2 GPIO_WriteBit..................................................................................................... - 20 -
飞思卡尔K60入门课件

K60芯片内置硬件浮点单元,支持浮点运算 和数字信号处理。
外设接口丰富
可扩展性
K60芯片集成了多种外设接口,如UART、 SPI、I2C等,方便开发者进行硬件连接和 通信。
K60芯片支持多种外设扩展,可以根据不同 的应用需求进行功能扩展。
02 K60开发环境搭建
开发环境概述
嵌入式系统开发环境
用于编写、编译、调试嵌入式系统程序的环境。
飞思卡尔官方网站和开发者社区提供了丰富的教程资源,从入门到进阶,涵盖 了K60微控制器的各种应用场景和开发技巧。
参与开源项目
开源项目
参与开源项目是学习K60的一种有效 方式,可以了解其他开发者是如何使 用K60进行开发的,并从中获取灵感 和学习经验。
贡献社区
通过参与开源项目,不仅可以学习到 其他人的开发经验,还可以将自己的 经验和技巧分享给社区,与其他开发 者共同进步。
电平;在读操作时,可以读取引脚的电平状态。
中断编程
中断概述
中断是一种常见的硬件机制,用于处理紧急事件或异常情况。在微控制器中,中断可以由 外部事件或内部事件触发,打断当前正在执行的程序,转而执行相应的中断处理程序。
中断配置
配置中断的触发方式、优先级和中断处理程序。在飞思卡尔K60微控制器中,可以通过编 程配置中断的属性。
连接调试接口
将调试器正确连接到K60开发板的调试接口上, 确保物理连接稳定。
ABCD
驱动安装
根据调试器型号,安装相应的驱动程序,以便于 与开发环境进行通信。
配置调试参数
在开发环境或调试软件中设置调试参数,如波特 率、数据位、停止位等,确保通信正常。
系统烧写
准备烧写文件
根据K60的硬件配置和开发 需求,准备相应的系统烧写
K60(Rev6-Ch53-I2S)(中文)
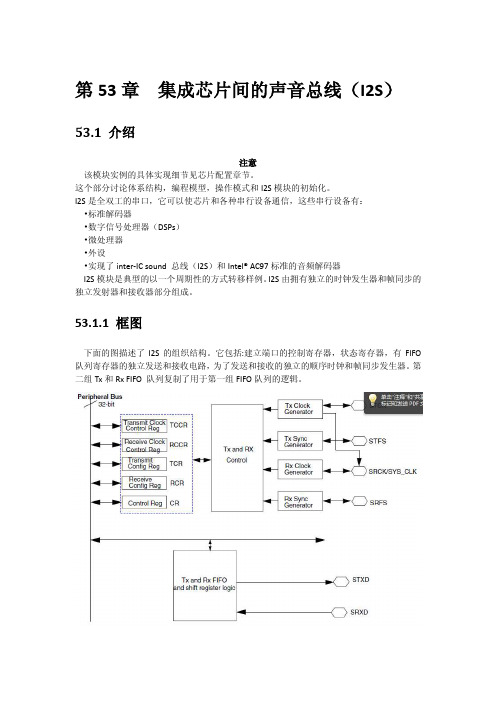
下面的图描述了 I2S 的组织结构。它包括:建立端口的控制寄存器,状态寄存器,有 FIFO 队列寄存器的独立发送和接收电路,为了发送和接收的独立的顺序时钟和帧同步发生器。第 二组 Tx 和 Rx FIFO 队列复制了用于第一组 FIFO 队列的逻辑。
图 53-1 面向用户的 I2S 框图
列可以用于网络模式从而为发送和接收提供两个独立的通道 •可编程数据接口模式,例如 I2S, lsb- and msb-aligned •可编程单词长度(8, 10, 12, 16, 18, 20, 22 or 24 位) •用于帧同步和时钟发生器的编程选项 •可编程的 I2S 模式(主,从,正常) •在 I2S 的主模式下过采样时钟作为 SRCK 的输出 •AC97 支持 •用于发送和接收部分的完全独立的时钟和帧同步选择。在 AC97 标准中时钟来自外部
53.1.2 特性
I2S 包含以下特性: •有独立或共享的内/外部时钟和帧同步的独立(异步)或共享(同步)的发送和接收部
分,在主或从模式下工作。 •使用帧同步的正常操作模式 •允许多个设备共享端口多大三十二个时段的网络操作模式 •无需同步帧的门控时钟操作模式 •两组 FIFO 发送和接收队列。四组 FIFO 队列中每组都是 15x32 位。两组 Tx/Rx FIFO 队
寄存器位的详细信息和字段功能以位顺序紧跟寄存器图表。
I2S 内存映射
绝 对 地 址 寄存器名
宽 度 访 问 复位值
段/页
(hex)
(位) 权限
4002_F000 I2S 发送数据寄存器 0(I2S0_TX0) 32
R/W 0000_0000h 53.3.1/
1693
4002_F004 I2S 发送数据寄存器 1(I2S0_TX1) 32
K60(Rev6-Ch11-PORT)(中文)

11端口控制与中断11.1 简介有关此模块的特定芯片的应用详细信息实例,请参阅芯片配置章节。
11.1.1 概述端口控制与中断(PORT)模块支持外部中断、数字滤波和端口控制功能。
对于32位的端口的每个引脚都可以单独的配置其功能,大多数功能都能直接影响端口,而无需考虑多路复用状态。
本章描述是PORT模式的每个引脚的使用实例。
不是每个端口的所有引脚都在专用的设备上实现了这些功能。
11.1.2 特性1)引脚中断:(1)每个引脚有对应的中断标志位和使能寄存器;(2)可配置每个引脚为边沿触发(上升沿,下降沿)或电平触发(高电平,低电平)(3)支持配置每个引脚的中断和DMA请求;(4)支持低功耗模式下的异步唤醒;(5)在所有数字引脚的复用模式中可以使用引脚中断;2)数字输入滤波器:(1)每个引脚的数字滤波器可以被任何数组外围复用引脚使用;(2)每个引脚有独立的使能或屏蔽控制位;(3)数字输入滤波器的5位的可选时钟源决定滤波大小;(4)在所有数字引脚的复用模式的数字滤波器有效3)端口控制(1)独立的上拉电阻控制寄存器,选择上拉、下拉、不上拉;(2)独立的驱动能力寄存器,选择高驱动或低驱动;(3)独立的斜率寄存器,选择快速变化或缓慢变化;(4)独立的输入被动的过滤器寄存器,选择使能或禁止;(5)独立的开环寄存器,选择使能或禁止;(6)独立的复用控制功能寄存器,选择模拟量输入,GPIO等最多6个特殊的数字功能;(7)在所有数字引脚的复用模式中可以选择使用功能配置寄存器。
11.1.3 操作模式11.1.3.1 运行模式在运行模式下,PORT能正常工作。
11.1.3.2 等待模式在等待模式下,PORT仍正常工作。
而当检测到使能的中断时,可被配置退出低功耗模式。
DMA请求在等待模式下仍会产生,但不会退出低功耗模式。
11.1.3.3 停止模式在停止模式下,除非被配置成使用1kHz的LPO时钟源运行,否则数字输入过滤器功能将被屏蔽。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第27章FLASH存储控制器(FMC)27.1 介绍FLASH存储控制器(FMC)是一个存储加速单元,它提供下面的功能。
在设备和两块非易性存储器之间的一个接口,bank 0 由程序flash组成,bank 1由FlexNVM组成。
可以加速FLASH和FlexNVM数据传输的缓存。
27.1.1 概述FLASH存储控制器管理设备和双Flash存储器之间的接口。
FMC获取详细记录了存储器配置的状态信息,使用该信息可确保接口的正确。
下表显示了支持另外,对bank 0和bank 1来说,FMC提供了3个独立的机制,其作用是加速设备和Flash存储器之间的接口。
利用一个64位预缓冲可以预先得到下一个64位flash存储器的位置,利用两个4路,8级缓存和一个单端64位缓冲可以预先存储要访问的flash存储器或者FlexMemory数据。
27.1.2 特征FMC特征包括:●设备与双flash存储器和FlexMemory之间的一个接口:●当程序Flash和FlexNVM用作数据存储器时支持8位、16位、32位读操作。
●当FlexNVM和FlexRAM作为EEPROM时,支持8位,16位,32位读/写操作。
●对于bank 0和bank 1:读连续的32位空间返回第二个读的数据,没有等待状态。
存储器通过32位总线访问返回64位数据。
●交叉通路访问功能为每个交叉通路主机设置禁止访问,只读访问,只写访问,读/写访问功能。
●加速从程序flash存储器和FlexMemory到设备的数据传输:●带有主机和bank指令/数据访问控制的64位预测缓冲区●4路,8级,每行64位高速缓存,总共32个64位目录,带有替换算法和锁存方式。
●可以使能每个bank的单端缓冲区●可以禁止使用预缓冲和单端缓冲。
27.2 操作模式FMC只在设备访问flash存储器或者FlexMemory时工作。
就设备电源模式而言:FMC只在运行和等待模式下工作,包括VLPR和VLPW模式。
当FlexMemory或者flash存储器不能被访问时,对于任何模式,FMC禁止时27.3 外部信号描述FMC没有外部信号27.4 存储器映像和寄存器描述编程模块包括FMC控制寄存器和编程可见的高速缓存(数据和标签/有效条目)。
注意这些寄存器只有在Flash空闲时才能编程(比如:从RAM执行)。
在flash 访问的过程中改变配置设置可能导致非确定性的行为。
注意访问FMC 4KB地址空间范围内未实现的寄存器将导致没总线错误。
注意当任何flash缓存的段被编程时,系统软件需要保持存储器的一致性。
例如:所有重新编程的flash缓冲区数据应该是无效的。
相应地,高速缓存程序可见的写操作必须发生在一个编程或者擦除事件之后,且在一个新的存储器映像被访问之前。
高速缓存是一个4路(0~3路),8级缓存(0~7级)。
在下表详细描述了标签/有效性数据条目。
表27-3 程序可见缓存寄存器FMC存储映射27.4.1 Flash 访问保护寄存器(FMC_PFAPR )FMC_PFAPR 位描述27.4.2 Flash bank 0控制寄存器 (FMC_PFB0CR)FMC_PFB0CR 位描述27.4.3 flash Bank 1 控制寄存器(FMC_PFB1CR)该寄存器有一种格式类似PFB0CR,用来控制flash Bank 1的操作,而”全局”高速缓存控制字段为空。
\FMC_PFB1CR位描述27.4.4 缓存目录存储(FMC_TAGVDW0Sn)32条目缓存是一个4路,级联的8级缓存。
0-3路,0-7集。
在TAGVDWxSn,x 表示way,y表示集。
这部分给出了所有的8级(n=0-7)1路的标签/vld信息。
Addresses: FMC_TAGVDW0S0 –4001_F000h base + 100h offset = 4001_F100hFMC_TAGVDW0S1 – 4001_F000h base + 104h offset = 4001_F104hFMC_TAGVDW0S2 – 4001_F000h base + 108h offset = 4001_F108hFMC_TAGVDW0S3 – 4001_F000h base + 10Ch offset = 4001_F10ChFMC_TAGVDW0S4 – 4001_F000h base + 110h offset = 4001_F110hFMC_TAGVDW0S5 – 4001_F000h base + 114h offset = 4001_F114hFMC_TAGVDW0S6 – 4001_F000h base + 118h offset = 4001_F118hFMC_TAGVDW0S7 – 4001_F000h base + 11Ch offset = 4001_F11ChFMC_TAGVDW0Sn位描述27.4.5 缓存标签存储(FMC_TAGVDW1Sn)32个条目缓存是一个4路,级联的8级缓存。
0-3路,0-7集。
在TAGVDWxSn,x 表示way,y表示集。
这部分给出了所有的8级(n=0-7)2路的标签/vld信息。
Addresses: FMC_TAGVDW1S0 –4001_F000h base + 120h offset = 4001_F120hFMC_TAGVDW1S1 – 4001_F000h base + 124h offset = 4001_F124hFMC_TAGVDW1S2 – 4001_F000h base + 128h offset = 4001_F128hFMC_TAGVDW1S3 – 4001_F000h base + 12Ch offset = 4001_F12ChFMC_TAGVDW1S4 – 4001_F000h base + 130h offset = 4001_F130hFMC_TAGVDW1S5 – 4001_F000h base + 134h offset = 4001_F134hFMC_TAGVDW1S6 – 4001_F000h base + 138h offset = 4001_F138hFMC_TAGVDW1S7 – 4001_F000h base + 13Ch offset = 4001_F13ChFMC_TAGVDW1Sn 位描述27.4.6 缓存标签存储(FMC_TAGVDW2Sn )32个条目缓存是一个4路,级联的8级缓存。
0-3路,0-7集。
在TAGVDWxSn,x 表示way ,y表示级。
这部分给出了所有的8级(n=0-7)2路的标签/vld 信息。
Addresses: FMC_TAGVDW2S0 – 4001_F000h base + 140h offset = 4001_F140hFMC_TAGVDW2S1 – 4001_F000h base + 144h offset = 4001_F144hFMC_TAGVDW2S2 – 4001_F000h base + 148h offset = 4001_F148hFMC_TAGVDW2S3 – 4001_F000h base + 14Ch offset = 4001_F14ChFMC_TAGVDW2S4 – 4001_F000h base + 150h offset = 4001_F150hFMC_TAGVDW2S5 – 4001_F000h base + 154h offset = 4001_F154hFMC_TAGVDW2S6 – 4001_F000h base + 158h offset = 4001_F158hFMC_TAGVDW2S7 – 4001_F000h base + 15Ch offset = 4001_F15ChFMC_TAGVDW2Sn位FMC_TAGVDW2Sn描述27.4.7 缓存目录存储(FMC_TAGVDW3Sn)32个条目缓存是一个4路,8级缓存。
0-3路,0-7级。
在TAGVDWxSn 中,x表示路,y表示级。
这部分给出了所有的8级(n=0-7)3路的标签/vld信息。
Addresses: FMC_TAGVDW3S0 –4001_F000h base + 160h offset = 4001_F160hFMC_TAGVDW3S1 – 4001_F000h base + 164h offset = 4001_F164hFMC_TAGVDW3S2 – 4001_F000h base + 168h offset = 4001_F168hFMC_TAGVDW3S3 – 4001_F000h base + 16Ch offset = 4001_F16ChFMC_TAGVDW3S4 – 4001_F000h base + 170h offset = 4001_F170hFMC_TAGVDW3S5 – 4001_F000h base + 174h offset = 4001_F174hFMC_TAGVDW3S6 – 4001_F000h base + 178h offset = 4001_F178hFMC_TAGVDW3S7 – 4001_F000h base + 17Ch offset = 4001_F17CFMC_TAGVDW3Sn位描述27.4.8 缓存数据存储(高字节)(FMC_DATAW0SnU)32个64-bit项的高速缓存是4路的,8组的组相连缓存。
路编号为0-3,级被编号为0-7.在DATAWxSyU和DATAWxSyL中,x表示路,y表示级,U和L分别代表高位字和低位字。
这一部分代表(【63:32】位)的所有8级0路的高位字。
Addresses: FMC_DATAW0S0U –4001_F000h base + 200h offset = 4001_F200hFMC_DATAW0S1U – 4001_F000h base + 208h offset = 4001_F208hFMC_DATAW0S2U – 4001_F000h base + 210h offset = 4001_F210hFMC_DATAW0S3U – 4001_F000h base + 218h offset = 4001_F218hFMC_DATAW0S4U – 4001_F000h base + 220h offset = 4001_F220hFMC_DATAW0S5U – 4001_F000h base + 228h offset = 4001_F228hFMC_DATAW0S6U – 4001_F000h base + 230h offset = 4001_F230hFMC_DATAW0S7U – 4001_F000h base + 238h offset = 4001_F238hFMC_DATAW0SnU位描述27.4.9 缓存数据存储(低字节)(FMC_DATAW0SnL)32个64-bit项的高速缓存是4路的,8级的级相连缓存。