力矩控制器原理与接线
foc控制力矩
foc控制力矩
FOC(Field-Oriented Control,场向量控制)是一种用于电机控制的技术,
其中控制目标是将电机转子磁场的方向与电机的电流方向保持一致,从而实现对电机的精确控制。
FOC控制力矩是指通过调节电机的电流来实现所需转矩输出的控制策略。
FOC
通过将电机的定子电流和转子位置信息输入到控制器中,来计算所需的转子电流,以实现期望的转矩输出。
在FOC中,首先将电机的三相电流转换为一个旋转坐标系(通常为dq坐标系),其中d轴与电机的磁场方向对齐,q轴与磁场的垂直方向对齐。
然后,通过控
制d轴电流和q轴电流,可以实现对电机的转矩和转速的精确控制。
FOC控制力矩的基本原理是通过控制电机的磁场方向和大小,使得电机的转子磁场与控制器期望的转子磁场之间保持一致,从而实现所需的力矩输出。
具体的控制方法和算法涉及到电机模型、转子位置估计、PID控制器等技术。
总结而言,FOC控制力矩是一种通过调节电机的电流来实现所需转矩输出的控
制策略,在电机控制中具有广泛的应用。
交流力矩电机控制器的电路原理与检修
交流力矩电机控制器的电路原理与检修一、电路原理1.电源电路:电源电路主要是为控制器提供电源。
一般情况下,电源电路包括变压器、整流器和滤波器。
变压器将输入电压调整到合适的工作范围内,整流器将交流电转换为直流电,滤波器则用于过滤电源中的杂散信号,保证控制器正常工作。
2.传感器电路:传感器电路用于检测电动机的运行状态,将信号传递给控制电路。
常见的传感器包括电压传感器、电流传感器和速度传感器。
电压传感器用于检测电机的电压,电流传感器用于检测电机的电流,速度传感器用于检测电机的转速。
传感器将检测到的信号转换为电压信号,并传递给控制电路进行处理。
3.控制电路:控制电路主要是接收传感器电路传递过来的信号,并根据信号调节电机的电压、频率和相位。
控制电路包括比较器、计数器和逻辑控制器等。
比较器用于比较传感器信号和预设值,计数器用于计算电机的转速,逻辑控制器用于根据计数器的数值决定调节电压、频率和相位的方式。
4.驱动电路:驱动电路用于控制电机的转速和转矩。
驱动电路一般包括功率放大器和电机接口电路。
功率放大器将控制信号放大到合适的电平,电机接口电路将放大器的输出信号传递给电机,从而实现对电机的控制。
二、检修方法1.检查电源电路:检查电源电路的连接是否正常,变压器是否工作正常,整流器和滤波器是否损坏。
如果发现问题,应及时更换故障部件。
2.检查传感器电路:检查传感器电路的连接是否正常,传感器是否工作正常。
可以使用万用表或示波器对传感器输出的信号进行测量,并与预设值进行对比,判断传感器是否工作正常。
3.检查控制电路:检查控制电路的电路连接是否正常,比较器和计数器是否工作正常。
可以使用示波器对控制电路的输出信号进行测量,并与预设值进行对比,判断控制电路是否工作正常。
4.检查驱动电路:检查驱动电路的连接是否正常,功率放大器和电机接口电路是否工作正常。
可以使用示波器对驱动电路的输出信号进行测量,并与预设值进行对比,判断驱动电路是否工作正常。
力矩电机控制器原理

力矩电机控制器原理力矩电机控制器是一种用于控制力矩电机的设备,它通过对电机的电流进行精确调节,实现对电机的速度、转矩和位置的精准控制。
在工业生产和自动化领域,力矩电机控制器被广泛应用,其原理和工作方式对于了解力矩电机的控制和应用具有重要意义。
力矩电机控制器的原理主要包括电流控制、速度控制和位置控制。
在电流控制方面,控制器通过对电机施加不同的电流,来调节电机的转矩和输出功率。
电流控制是力矩电机控制的基础,也是实现电机精准控制的关键。
在速度控制方面,控制器通过对电机施加不同的电压和频率,来调节电机的转速。
速度控制可以实现对电机转速的精确调节,适用于需要频繁变速的场合。
在位置控制方面,控制器通过对电机施加不同的脉冲信号,来控制电机的位置和运动轨迹。
位置控制可以实现对电机位置的精确控制,适用于需要高精度定位的场合。
力矩电机控制器的原理基于电磁学和控制理论,通过对电机的电流、电压和脉冲信号进行精确控制,实现对电机的速度、转矩和位置的精准调节。
在实际应用中,力矩电机控制器通常与传感器、编码器和控制算法配合使用,实现对电机的闭环控制。
闭环控制可以实时反馈电机的状态信息,对电机进行更精准的控制,提高系统的稳定性和响应速度。
力矩电机控制器的原理对于理解力矩电机的控制和应用具有重要意义。
掌握力矩电机控制器的原理,可以帮助工程师和技术人员更好地设计和应用力矩电机控制系统,提高系统的性能和可靠性。
同时,了解力矩电机控制器的原理,也有助于对电机控制技术的深入理解,为相关领域的研究和应用提供理论支持。
总之,力矩电机控制器是一种重要的电机控制设备,其原理包括电流控制、速度控制和位置控制。
掌握力矩电机控制器的原理,对于理解电机控制技术和应用具有重要意义,有助于提高系统的性能和可靠性,推动相关领域的发展和进步。
交流力矩电机控制电路

更换损坏晶闸管器件,在三相供电回路中串入了 3 只由 XD1-25 扼流圈代作的三相电抗器,交付用 户使用后,晶闸管击穿的故障率大为降低。
二、TYPE TMA-4B 力矩电机控制器 TYPE TMA-4B 系列力矩电机控制器,额定电压 3 相 380V±10%;输出电压 70V~365V,输出电压不
晶闸管调压电路中,发现 1000V 以下截止电压的器件,较易发生击穿损坏故障。BT139 为截止电 压 600V 的管子,处于交流电压峰值 500V 的边缘,虽然实际上有 200V 的截止电压余量(标定击穿电 压值尚有 100V 富裕量),若用于优质电网(未被污染,电压呈较好的正弦波),一般没有问题。但问题 是现在的电网,因非线性整流设备的大量安装和应用,好多地区电网波形畸变已相当严重,这使得晶闸 管调压设备的运行(电气)环境变得恶劣,设备本身的应用,又反过来加剧了电网的劣变。用户和供应 厂商,往往又出于成本的考虑,省掉了安装该类设备必须追加的输入电抗器!所以导致晶闸管调压设备 的高故障率,表现为耐电压稍低的晶闸管模块屡被击穿!
平衡度<±2%;输出最大电流 6~80A;转矩调节比:10:1。 1、TYPE TMA-4B 力矩电机控制器的电路分析: 〔交流调压主电路〕采用 BTA40 三只 40A600V 双向塑封三端晶闸管器件,担任三相交流调压输出
的任务,晶闸管器件的两端并联有压敏电阻,以吸收有害尖峰电压。U、W 接有 450V 量程的电压表, 便于监控输出电压的高低。U、W 输出端还接输出电压反馈变压器(见图 3),将输出电压信号反馈回 控制电路,实现电压闭环控制,达到稳定输出电压的目的。
〔末级触发电路〕末级触发电路为三路脉冲变压器 TB1~TB3,由前级电路的功率放大管驱动(见 图 3),D3、D6、D9 用于吸收放大管截止期间脉冲变压器产生的反峰电压,D1/D2、D4/D5、D7/D8, 用于限制触发电流的方向,使晶闸管只承受正向触发电路。末级触发电路的供电,由非稳压电源+15V 供给。
ZCLJ型力矩电机控制器说明书
ZCLJ-
一. 简述
ZCLJ-有轴流冷却风机,二. 主要技术指标
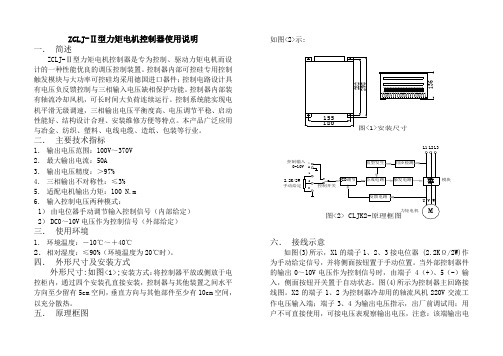
1. 输出电压范围:100V ~370V 2. 最大输出电流:50A 3. 输出电压精度:>97% 4. 三相输出不对称性:≤3% 5. 适配电机输出力矩:6. 输入控制电压两种模式:
1) 2) DC0~10V 三. 使用环境
1. 环境温度:-10℃~+40℃ 2. 相对湿度:≤90%四. 外形尺寸及安装方式
外形尺寸:如图<1>;控柜内,方向至少留有5cm 空间,以充分散热。
五. 原理框图
作电压输入端;端子3、4为输出电压指示,出厂前调试用;用户不可直接使用,可接电压表观察输出电压,注意:该端输出电
长时工作散热不良而烧毁控制器。
七.简单故障判别
1.通电后电机不转:
a) 检查有无控制信号输入
b) 检查控制器侧面开关是否置于正确位置
C) 检查电机是否由于负载过大,发生堵转
2.通电后电机立即高速运行
a) 检查是否为控制信号已加在最大
b) 检查是否把端子“3”的+10V接入了控制输入端。
3.通电,电机抖动
a) 检查是否为控制信号线接头松动
b) 检查是否为三相电源缺相。
●控制信号双切换、控制简单●带负荷能力强
常州中驰电器设备有限公司。
力矩控制器原理与接线
力矩控制器一.概述力矩控制器为代替三相自耦变压器,而专门设计的一种先进的全电子化控制装置,能工作在电阻、电感性负载。
此控制器广泛应用于五金机械塑料、电线、电缆、绳网、印刷、造纸、纺织、印染、化疑纤、橡绞、电影胶皮等各种机械、机电行业。
与三相自藕调压器相比较,本控制器由于采用了电子调节,无触点磨损,电压调节平衡,起动性能好,本控制器具有体积小、重量轻、效率高、发热小、节约能源(经测定平均节能17%以上),使用寿命长、安装、维修方便。
二.技术参数1.输入电压:三相交流电压 380V±10%2.输出电压:三相交流电压 0-380V3.额定电流:标称电流(面板上标称的电流)4.输出电压可以无极调节,从而使电机实现无极调速5、频率50~60HZ。
三.工作环境1、环境温度:-25℃~+55℃。
2、空气相对湿度:≤85%(20℃±5℃)。
3、无显著冲击震动。
四.工作原理三相调压器调速控制器主回路采用进口双向可控硅,改变可控硅的开放角大小,就能使电机或其它负载的工作电压从0至380V连续可调,也就实现了平衡地调压调速过程,以满足不同生产的工艺要求。
在可控硅控制电路中采用了先进的集成电路,加入了电流回馈, 构成一个循环控制系统。
既提高了力矩电机的机械性硬度,又改善性能,同时还提高了力矩电机的超载能力,扩大了力矩电机的使用范围。
为了使调速过程尽快进入稳定状态,在控制回路中还加入了电压回馈以提高控制器的技术性能。
五.使用方法1. 接线说明:请严格按以下接线示意图接线:D1、D2、D3三点为 控制器的输出端,接力矩电机;A 、B 、C 、为输入端接三相380V 电源。
N 为零线接口,接零线。
2.旋钮旋至零位。
3.总电源。
(指示灯亮)4.控制开关,调节调速电位器旋钮,使电机达到你所需的速度。
5. 电位器为精密长寿电位器。
六.注意事项1.严禁输出短路。
2.严禁使用中,负载电流超过过面板标称电流值。
3、严禁零线N 接入电机星点.4、若控制器出现问题务必请专业人员检修,以免使故障范围扩大.六.接线图A B C D1D2D3ABC 输入 380V 输出 0~380V V 1U1W1W2V 2U2力矩电机A B C D1D2D3A B C输入 380V 输出 0~380VV 1U1W1W2V 2U2力矩电机N。
关于力矩限制器的原理分析及结构介绍
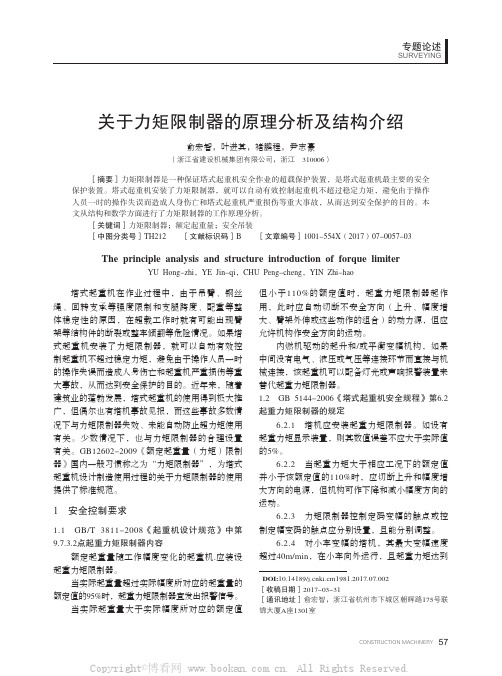
57CONSTRUCTION MACHINERY关于力矩限制器的原理分析及结构介绍俞宏智,叶进其,褚鹏程,尹志豪(浙江省建设机械集团有限公司,浙江 310006)[摘要]力矩限制器是一种保证塔式起重机安全作业的超载保护装置,是塔式起重机最主要的安全保护装置。
塔式起重机安装了力矩限制器,就可以自动有效控制起重机不超过稳定力矩,避免由于操作人员一时的操作失误而造成人身伤亡和塔式起重机严重损伤等重大事故,从而达到安全保护的目的。
本文从结构和数学方面进行了力矩限制器的工作原理分析。
[关键词]力矩限制器;额定起重量;安全吊装[中图分类号]TH212 [文献标识码]B [文章编号]1001-554X (2017)07-0057-03The principle analysis and structure introduction of forque limiterYU Hong -zhi ,YE Jin -qi ,CHU Peng -cheng ,YIN Zhi -hao塔式起重机在作业过程中,由于吊臂、钢丝绳、回转支承等强度限制和支腿跨度、配重等整体稳定性的原因,在超载工作时就有可能出现臂架等结构件的断裂或整车倾翻等危险情况。
如果塔式起重机安装了力矩限制器,就可以自动有效控制起重机不超过稳定力矩,避免由于操作人员一时的操作失误而造成人身伤亡和起重机严重损伤等重大事故,从而达到安全保护的目的。
近年来,随着建筑业的蓬勃发展,塔式起重机的使用得到极大推广,但偶尔也有塔机事故见报,而这些事故多数情况下与力矩限制器失效、未能自动防止超力矩使用有关。
少数情况下,也与力矩限制器的合理设置有关。
GB12602-2009《额定起重量(力矩)限制器》国内一般习惯称之为“力矩限制器”,为塔式起重机设计制造使用过程的关于力矩限制器的使用提供了标准规范。
1 安全控制要求1.1 GB/T 3811-2008《起重机设计规范》中第9.7.3.2点起重力矩限制器内容额定起重量随工作幅度变化的起重机.应装设起重力矩限制器。
力矩电机控制器 原理

力矩电机控制器原理
力矩电机控制器是一种电动机控制设备,用于控制力矩电机的运行和性能。
该控制器通过调整电机的电源电压和频率,来实现对电机转动的控制。
力矩电机控制器的工作原理基于电机中的电磁学原理。
力矩电机通过电流在电磁场中产生力矩,从而转动电机。
通过改变电源电压和频率可以改变电流的大小和方向,从而实现对电机的力矩调节。
力矩电机控制器通常由电源模块、控制逻辑模块和功率放大模块组成。
电源模块负责为电机提供稳定的电源电压和频率。
控制逻辑模块通过传感器获得电机的转速和负载信息,并根据预设值进行计算。
功率放大模块根据控制逻辑模块的输出信号,控制电源电压和频率的变化,从而改变电机的力矩输出。
在运行过程中,力矩电机控制器根据需要调节电压和频率,以达到所需的转速和力矩。
通过控制电源电压的调节,可以改变电机的输出转矩,从而实现负载的控制。
同时,控制器还可以对电机进行保护,如过载保护、过热保护等,以确保电机的安全运行。
总之,力矩电机控制器通过调节电压和频率,控制力矩电机的转速和力矩输出。
它是电机系统中的重要组成部分,可以应用于各种领域,如工业生产、交通运输、家电等。
三相力矩电机控制器原理
三相力矩电机控制器原理
三相力矩电机控制器,主要用于将三相交流电压转变成直流电压的电子设备,是工业控制中的核心部件,广泛应用于电力、冶金、化工、石油等各个行业。
一般用于各种工业自动化的控制系统中。
三相力矩电机控制器由交流接触器和电动机两部分组成。
电动机是一个磁场中的旋转磁极,由一套机械系统驱动,在其中产生旋转磁场,其速度与磁极对数有关。
在电动机中,交流接触器可在两种情况下工作:当负载转矩很小时(如轻负载),电动机处于空载状态;当负载转矩很大时(如重负载),电动机处于负载状态。
交流接触器的一个重要特性是它可以在两种情况下均能保持额定转矩;同时,它也可以在一个工作周期内自动地改变其吸合电压和释放电压。
在实际使用中,这种特性主要是通过改变其工作周期的长短来实现的。
在电动机启动过程中,一般采用低速挡工作以减少电流冲击,以减小电动机的温升;当电动机处于低速运行时(如轻负载),一般采用高速挡工作以提高其功率因数。
—— 1 —1 —。
力矩控制器原理

力矩控制器原理
力矩控制器是一种用于控制机械系统中的力矩的设备。
其基本原理是通过对输入的电流或电压进行调节,控制输出的力矩大小和方向。
力矩控制器通常由两个主要部分组成:传感器和执行器。
传感器用于测量系统中的力矩,并将这些测量结果发送到控制器。
执行器根据控制器的指令,产生相应的力矩输出。
在力矩控制器中,控制算法起着关键作用。
它通过对测量到的力矩信号进行分析和处理,生成相应的控制信号。
常见的控制算法包括比例-积分-微分(PID)控制器和模糊控制器。
这些
算法可以根据系统的需求进行调节,以实现更精确的力矩控制。
在实际应用中,力矩控制器常常用于机械臂、机床和风力发电机等设备中。
它们可以在系统运行时对外界干扰进行补偿,提供精确的力矩控制能力。
此外,力矩控制器还可以实现力矩和位置的联合控制,以满足对系统运动的复杂要求。
总之,力矩控制器通过对输入的电流或电压进行调节,控制输出的力矩大小和方向。
它是机械系统中重要的控制设备,可以实现精确的力矩控制和运动控制。
基于力矩控制的电动助力车控制器的设计

毕业设计(论文)学院名称学院名称专业名称专业名称学生学号学生学号学生姓名学生姓名指导教师教授姓名助理指导老师老师姓名202 年月基于力矩控制的电动助力车控制器的设计摘要这几年来,燃油交通工具由于尾气排放的问题已经对城市的空气造成了严重的污染。
社会在大力发展经济的同时,由于燃油车在耗油量上越来越大,环境污染问题以及资源短缺问题越来越严重了。
因此,发展“绿色”交通工具是一个很好且很重要的课题。
电动助力车便是在这样的背景下发展和兴起起来。
但是就目前而言,大部分的电动助力车产品的控制装置都是采用低集成度的元件,这样导致了功能太过简单,从而无法充分发挥系统的潜力和处理一些特殊的控制问题。
然而我的控制器的控制芯片是采用了ATMEL公司51系列单片机AT89C51,通过力矩式助力传感器来智能的调节无刷直流电机的转速。
在硬件方面,进行了微控制单元电路设计、以MC33033芯片为核心的三相全桥驱动电路设计、以DS12887芯片为核心的时钟电路设计、系统硬件保护电路设计和显示电路设计。
在软件方面,采用了模块化编程的思想,给出了本控制系统的软件设计思路。
根据无刷直流电机的控制原理,对系统的控制部分进行了详细分析。
同时,系统具有过流保护、欠压报警及过热保护功能。
我的控制器提高了无刷直流电机的利用率以及维护的方便性。
这样的控制系统的电动助力车,具有零空气污染、低噪音、高效率,运行性能良好的特点,做到了真正意义上的“绿色”交通工具,有着广阔的发展潜力以及巨大的市场潜力。
关键词:“绿色”交通工具;电动助力车;力矩式助力传感器;无刷直流电机Design Of Controller For Electronic Power Bicycle Based On Torque ControlAbstractOver the past few years, fuel transportation as the exhaust problem has caused serious air pollution of the city. With the development of economy, the traditional fuel vehicles sharp increase in fuel consumption, environmental problems and energy crisis problem become increasingly serious, therefore, development of "green" transport is a very good and very important topic. Electric moped is under the background of the development and rise up. But for now, most of the electric moped product control device with low integration element, this led to a function is too simple, to bring into full play the potential of the system and deal with some special control problem. However my controller control chip is used the ATMEL company 51 series single chip microcomputer AT89C51, through the torque type power sensors to intelligent control of brushless dc motor speed. In terms of hardware, the micro control unit circuit design, MC33033 chip as the core of three-phase full bridge drive circuit design, DS12887 chip as the core of clock circuit design, design of system hardware protection circuit and display circuit design. In the aspect of software, adopts the modular programming ideas, the control system software design are given. According to the principle of brushless dc motor control, the control parts of the system are analyzed in detail. At the same time, the system has over current protection, under-voltage alarm and overheating protection function. I raise the utilization rate of brushless dc motor controller and maintenance convenience. Such a control system of electric moped, with zero air pollution, low noise, high efficiency, good running performance, the characteristics of did in the true sense of "green" transport, with wide development potential and huge market potential.Keywords: “Green” vehicles;Electric power Bicycle;Torque type power sensor;BLDC motor目录摘要 (II)ABSTRACT (III)1绪论 (1)1.1研究背景和意义 (1)1.2电动助力车的原理和组成结构及其特点 (1)1.3电动助力车领域在国内外的现状 (2)1.4本设计的主要工作 (2)2智能型电动助力车控制器方案的确定 (4)2.1电动助力车的控制方式 (4)2.2力矩传感器的基本原理及方案选定 (4)2.3电动助力车控制器的总体方案 (4)3无刷直流电机及其驱动控制电路 (6)3.1无刷直流电机的特点 (6)3.2无刷电机的驱动控制电路 (6)4单片机及其外围硬件电路的设计 (10)4.1单片机概述及AT89C51简介 (10)4.2单片机外围硬件电路的选择与设计 (12)4.2.1模数与数模转换模块 (12)4.2.2时钟芯片 (15)4.2.3温度传感器和液晶显示模块 (17)5系统相关技术及软件设计 (20)5.1控制系统相关技术 (20)5.2系统软件设计 (22)5.2.1主程序的设计 (22)5.2.2部分模块的软件设计 (22)结论 (28)致谢 (29)参考文献 (30)1 绪论1.1 研究背景和意义二十一世纪最为突出的两大主题,一个是保护环境,另一个便是节约能源。
力矩电机控制器工作原理
力矩电机控制器工作原理首先,了解力矩电机的工作原理对于理解力矩电机控制器的工作原理至关重要。
力矩电机是一种基于电磁原理的电机,它的根本原理是通过电流激励电磁线圈,在电磁力的作用下产生转矩。
转矩的大小与电磁线圈内部的磁场强度成正比。
在力矩电机中,转子是由永磁体或电磁线圈组成的,配以感应线圈作为定子,电流通过感应线圈后产生磁场,与转子磁场相互作用,从而产生力矩。
首先是信号生成部分。
在力矩电机控制器中,通常会使用传感器来检测力矩电机的转矩、速度和位置等参数。
常见的传感器包括编码器和霍尔传感器。
编码器通过检测转矩电机转子位置的变化,确定转子的角度和速度。
而霍尔传感器则通过检测磁场的变化,确定转子的位置和速度。
通过传感器测量得到的参数可以反馈给控制器,作为控制信号的输入。
控制器接收到这些参数之后,可以根据设定的控制算法进行处理,并产生相应的控制信号。
其次是信号驱动部分。
信号驱动部分主要由功率放大器和电源组成。
功率放大器负责将控制信号放大,并转换为适合驱动力矩电机的电流和电压输出。
电源则提供所需的电能,保证力矩电机正常运行。
在力矩电机控制器中,常见的驱动方式有电压控制和电流控制两种。
电压控制方式是通过控制输出电压的大小和方向来实现对力矩电机的控制。
电流控制方式则是通过控制输出电流的大小和方向来实现对力矩电机的控制。
具体采用哪种控制方式,需要根据实际应用场景来确定。
力矩电机控制器的工作过程可以简单描述为:首先,传感器检测力矩电机的转矩、速度和位置等参数,并将其反馈给控制器。
其次,控制器根据设定的控制算法处理这些参数,并产生相应的控制信号。
接着,控制信号经过功率放大器放大,并转换为适合驱动力矩电机的电流和电压输出。
最后,力矩电机接收到这些电流和电压,并根据其大小和方向产生相应的转矩,实现精确的控制。
总结起来,力矩电机控制器通过信号生成和信号驱动两部分的工作,实现对力矩电机的精确控制。
通过控制电流和电压的大小和方向,可以实现对转矩电机的转矩、速度和位置等参数的控制。
力矩控制器的原理

力矩控制器的原理力矩控制器是一种广泛应用于机器人和自动化系统中的控制方案。
其原理是通过测量和控制机械系统中的力矩,实现对系统运动的控制和稳定。
力矩控制器的核心思想是在实时测量机械系统中的力矩,并根据测量值进行反馈控制。
在力矩控制器中,力矩传感器通常被用于测量机械系统中的力矩大小。
传感器中的负载细节、电容感应力矩传感器和应变传感器等是测量力矩的常用传感器。
力矩控制器中的控制算法根据测量到的力矩值计算出控制输出信号,以实现对机械系统的控制。
常见的控制算法包括比例控制、积分控制和微分控制等。
这些控制算法基于力矩误差,即实际测量到的力矩值与期望力矩值之间的差异。
通过调整控制算法中的参数,可以优化控制器的性能,实现更好的控制效果。
力矩控制器的原理可以分为两个部分:力矩计算和力矩反馈控制。
力矩计算部分根据物理特性和机械结构,将输入信号转换为力矩值。
力矩反馈控制部分根据力矩误差,调整输出信号,以控制机械系统。
下面将详细介绍这两个部分的原理。
力矩计算是力矩控制器的一个重要环节。
力矩计算部分通常包括力矩传感器和信号处理器。
力矩传感器负责测量机械系统中产生的力矩。
常见的力矩传感器包括电容感应力矩传感器和应变传感器等。
电容感应力矩传感器是一种基于电容变化原理的传感器。
它通过测量电容量的变化,来间接测量力矩大小。
电容感应力矩传感器内部包含一个固定的电容,当受力物体施加在传感器上时,电容量会发生变化。
传感器通过测量电容量的变化,从而获取力矩的大小。
应变传感器是一种常见的力矩传感器。
它基于应变原理来测量力矩。
应变传感器通过在机械系统中安装应变片来测量应变。
当施加力矩时,应变片会发生形变。
应变传感器通过测量应变片的形变,来估计力矩的大小。
除了测量力矩大小,力矩计算部分还要对原始测量值进行滤波和校准等处理。
滤波可以去除测量误差和噪声,提高测量精度。
校准可以消除传感器的非线性和偏差,提高控制精度。
力矩反馈控制是力矩控制器的另一个重要环节。
力矩控制原理

力矩控制原理力矩控制是机械工程中的重要概念,它在机械设计、控制系统和工程实践中都扮演着重要角色。
力矩控制原理是指在机械系统中,通过对力矩的控制来实现对系统运动的精确控制。
在本文中,我们将深入探讨力矩控制的原理、应用和相关概念,帮助读者更好地理解和应用力矩控制技术。
力矩控制的基本原理是通过施加力矩来控制物体的转动或平衡状态。
在机械系统中,力矩可以由外部力或内部力矩产生,它们可以改变物体的角动量,从而实现对物体运动状态的控制。
在实际应用中,力矩控制可以通过控制电机、液压系统或气动系统来实现,从而实现对机械系统的精确控制。
在力矩控制中,有几个重要的概念需要理解。
首先是力矩的概念,力矩是由施加在物体上的力和力臂(力作用点到旋转轴的距离)共同决定的。
其次是力矩的方向,力矩可以使物体产生顺时针或逆时针的转动,其方向由右手定则确定。
最后是力矩的平衡,当物体受到的力矩平衡时,物体将保持静止或匀速转动。
在实际工程中,力矩控制有着广泛的应用。
例如在机械臂控制中,通过控制各关节的力矩,可以实现机械臂的精确运动和操作。
在航天器和卫星的姿态控制中,力矩控制也扮演着重要角色,通过对姿态控制系统的力矩进行精确控制,可以实现航天器和卫星的稳定飞行和定位。
此外,在工业自动化和机器人领域,力矩控制也被广泛应用,通过对电机和液压系统的力矩进行精确控制,可以实现工业生产线的自动化操作和机器人的精确运动。
在力矩控制中,控制系统的设计和参数调节是非常重要的。
合理的控制系统设计可以保证力矩控制的稳定性和精确性,而合适的参数调节可以使控制系统具有良好的动态性能和鲁棒性。
在实际工程中,通常会采用PID控制器、模糊控制器或神经网络控制器来实现力矩控制,通过对控制器的参数进行调节,可以实现对力矩的精确控制。
总之,力矩控制原理是机械工程中的重要概念,它在机械设计、控制系统和工程实践中都有着广泛的应用。
通过对力矩的理解和控制,可以实现对机械系统的精确控制,从而提高机械系统的性能和稳定性。
塔式起重机回转机构极限力矩限制器
塔式起重机回转机构极限力矩限制器塔式起重机回转机构极限力矩限制器是一种用于保护起重机回转机构安全运行的重要装置。
它的作用是监测回转机构所受的力矩,并在超过设定值时自动停止运行,以防止机械故障和事故的发生。
塔式起重机是一种常用的建筑起重设备,其回转机构负责实现起重机的回转运动。
回转机构通常由电机、减速器、回转支架、行星齿轮、回转齿圈等组成。
在起重作业过程中,回转机构承受着巨大的力矩,如果超过其承载能力,可能导致机械损坏、设备失灵甚至事故发生。
为了保证塔式起重机回转机构的安全运行,需要安装极限力矩限制器。
极限力矩限制器的原理是通过感应和检测回转机构所受的力矩,一旦力矩超过设定值,就会发出信号,使起重机停止回转。
这样可以有效地避免超载运行,保护回转机构的安全运行。
极限力矩限制器通常由传感器、控制器和停止装置组成。
传感器负责监测力矩的大小,将信号传递给控制器。
控制器通过与回转机构的控制系统连接,一旦接收到传感器发出的超过设定值的信号,就会触发停止装置,使起重机停止回转。
这样,即使操作人员没有及时察觉力矩超载的情况,也能及时停止起重机的运行,避免事故的发生。
极限力矩限制器的设置是根据起重机的设计参数和使用要求来确定的。
在安装过程中,需要仔细测量回转机构的力矩特性,并根据实际情况进行调整和校准。
同时,还需要定期检查和维护极限力矩限制器,确保其正常工作和准确可靠。
除了保护回转机构的安全运行,极限力矩限制器还可以提高起重机的工作效率和运行稳定性。
通过监测力矩的大小,可以及时发现起重机的负载情况,避免超载和过载运行,从而提高起重机的工作效率。
此外,极限力矩限制器还可以提供实时的力矩监测数据,为起重机的运行管理和维护提供参考依据。
塔式起重机回转机构极限力矩限制器是一项重要的安全装置,它可以有效地保护起重机回转机构的安全运行。
它的安装和使用要求严格,需要根据实际情况进行调整和校准。
通过合理设置和使用极限力矩限制器,可以提高起重机的工作效率和运行稳定性,确保起重作业的安全和高效进行。
交流力矩电机控制器说明书
交流力矩电机控制器说明书
力矩电机控制器是一种用于控制力矩电机运行的设备,它在工业自动化和机械控制领域起着非常重要的作用。
下面我将从多个角度对力矩电机控制器进行说明。
首先,从技术原理角度来看,力矩电机控制器通过控制电流和电压来实现对力矩电机的精准控制。
它通常包括电流传感器、电压传感器、控制算法和执行器等部件,通过对这些部件的协调运作,实现对电机的启动、停止、加速、减速以及转矩的精确控制。
其次,从功能特点方面来说,力矩电机控制器具有多种功能,例如速度闭环控制、位置闭环控制、电流限制保护、过载保护、过压保护、欠压保护等。
这些功能可以保证电机在各种工况下都能够稳定可靠地运行,提高了设备的安全性和稳定性。
再者,从应用领域来看,力矩电机控制器广泛应用于各种工业自动化设备和机械控制系统中,如数控机床、机器人、印刷设备、包装设备、输送机、起重机等。
它们在这些设备中起着至关重要的作用,提高了设备的精度、效率和稳定性。
此外,从市场发展趋势来看,随着工业自动化水平的不断提高,力矩电机控制器的需求也在不断增长。
未来,随着新材料、新工艺
和新技术的不断涌现,力矩电机控制器的性能将会得到进一步提升,功能将会更加丰富,应用领域也将会进一步扩大。
综上所述,力矩电机控制器作为一种用于控制力矩电机运行的
设备,在技术原理、功能特点、应用领域和市场发展趋势等方面都
具有重要意义。
希望以上说明能够对你有所帮助。
电机力矩控制原理

电机力矩控制原理咱先得知道啥是电机力矩呀。
你可以把电机想象成一个超级大力士,这个力矩呢,就像是大力士使出的力气大小。
电机在工作的时候,要根据不同的任务来调整自己的力气,这就是力矩控制的重要性啦。
那电机是怎么控制力矩的呢?这就像是一场精妙的魔术表演。
电机里面有很多小秘密哦。
从最基本的来说,电流可是个关键角色。
你想啊,电流就像是给电机这个大力士喝的能量饮料。
电流越大,电机就越有劲儿,产生的力矩也就越大。
就好比你给一个人吃很多很多的饭,他就会更有力气干活一样。
但是呢,这可不是随便加电流就行的,要是电流加得太猛,电机可能就会“撑坏”啦,就像人吃太多会肚子疼一样。
再说说磁场。
磁场对于电机就像是一个魔法场。
电机里有定子和转子,它们之间的磁场相互作用,就像两个好朋友在互相拉扯。
当我们想要改变电机的力矩时,我们可以调整磁场的强度或者方向。
比如说,我们把磁场变强,就好像是给电机的大力士朋友找了个更厉害的帮手,那电机产生的力矩自然就会变大啦。
这就像是两个人一起拉东西,肯定比一个人拉的力气大。
还有一个很有趣的点呢,就是电机的负载。
负载就像是电机要拉的东西。
如果负载很重,电机就得使出更大的力气,也就是产生更大的力矩。
这就好比你要搬动一个大石头,肯定得比搬小石头用更多的力气。
电机很聪明的,它能感觉到负载的大小,然后自动调整自己的力矩。
不过有时候,如果负载突然变得超级大,超过了电机的能力范围,电机可能就会转不动啦,就像小蚂蚁想搬大象一样,根本不可能嘛。
在实际的应用里呀,电机力矩控制到处都能看到。
比如说电动汽车。
电动汽车的电机要根据不同的路况和驾驶需求来调整力矩。
当汽车要爬坡的时候,电机就得加大力矩,就像人爬山的时候要更用力一样。
要是在平路上平稳行驶呢,电机就不需要那么大的力矩啦。
还有工厂里的那些机器,有些机器要精确地控制力矩来完成精细的加工任务。
比如说拧螺丝,如果力矩太大,螺丝可能会被拧坏,如果力矩太小,螺丝又拧不紧。
所以电机要像一个超级细心的工匠一样,精确地控制力矩。
力矩控制原理

力矩控制原理
力矩控制原理是指通过控制作用力矩来实现机械系统的运动控制。
力矩控制原理在许多工业领域中应用广泛,包括机器人、飞行器、汽车等。
在力矩控制中,通常使用电机或液压系统作为执行器来产生力矩。
控制系统通过对执行器施加不同的力矩来实现所需的运动。
力矩控制的基本原理是通过测量和比较实际力矩和期望力矩,以实现系统的闭环控制。
具体而言,控制器会测量执行器产生的力矩,并将其与期望力矩进行比较。
根据比较的结果,控制器会根据一定的算法来调整执行器的输出力矩,以使实际力矩接近期望力矩。
在力矩控制中,通常会使用传感器来测量实际力矩。
这些传感器可以是力传感器、力矩传感器或扭矩传感器。
通过将传感器与执行器连接,可以实时测量力矩并反馈给控制器。
控制器通常会采用PID控制算法来调节执行器输出的力矩。
PID控制算法通过比较实际力矩和期望力矩的差异,以及力矩
的变化率和积分误差,来计算控制器的输出。
通过反复迭代调整输出,可以使实际力矩逐渐接近期望力矩,从而实现准确的力矩控制。
总的来说,力矩控制原理通过测量和调整执行器的力矩,以实现机械系统的精确控制。
它的应用范围广泛,并在许多工业领域中发挥着重要作用。
电机控制系统中的电机力矩闭环控制
电机控制系统中的电机力矩闭环控制电机力矩闭环控制是电机控制系统中的重要部分之一,它可以有效地提高电机系统的稳定性和控制精度。
在电机控制系统中,电机力矩闭环控制起着至关重要的作用,下面将详细介绍电机力矩闭环控制的原理、实现方法以及在实际应用中的重要性。
一、电机力矩闭环控制的原理电机力矩闭环控制是通过实时监测电机输出力矩与期望力矩之间的差异,然后根据这一差异来调整电机控制参数,使输出力矩逐渐接近期望力矩。
通过不断地调节电机的控制参数,使得系统能够在外部负载变化或其他干扰的情况下保持稳定的输出力矩,从而实现精确的控制。
二、电机力矩闭环控制的实现方法实现电机力矩闭环控制需要依靠传感器对电机输出力矩进行实时监测,通常采用编码器或负载细胞等装置来测量电机输出力矩。
通过将传感器获取的力矩信号与期望力矩信号进行比较,并通过控制器计算出调节参数,然后反馈至电机控制系统,实现闭环控制。
三、电机力矩闭环控制在实际应用中的重要性电机力矩闭环控制在实际应用中具有重要的作用。
首先,它可以提高电机系统的动态响应速度和稳定性,使得系统能够更快地响应外部输入信号并实现精确的力矩输出。
其次,电机力矩闭环控制可以有效地抑制系统中的振动和波动,提高系统的控制精度和稳定性。
最后,电机力矩闭环控制还可以在电机运行过程中实时监测系统状态,帮助运维人员及时发现故障并采取相应措施,保证系统的正常运行。
综上所述,电机力矩闭环控制在电机控制系统中起着至关重要的作用,通过实时监测和调节电机输出力矩,可以提高系统的稳定性、控制精度和可靠性,是电机控制系统中不可或缺的一环。
在今后的电机控制系统设计和应用中,我们应该充分重视电机力矩闭环控制,并不断改进和优化控制算法,以满足不同应用场景对控制精度和稳定性的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力矩控制器
一.概述
力矩控制器为代替三相自耦变压器,而专门设计的一种先进的全电子化控制装置,能工作在电阻、电感性负载。
此控制器广泛应用于五金机械塑料、电线、电缆、绳网、印刷、造纸、纺织、印染、化疑纤、橡绞、电影胶皮等各种机械、机电行业。
与三相自藕调压器相比较,本控制器由于采用了电子调节,无触点磨损,电压调节平衡,起动性能好,本控制器具有体积小、重量轻、效率高、发热小、节约能源(经测定平均节能17%以上),使用寿命长、安装、维修方便。
二.技术参数
1.输入电压:三相交流电压 380V±10%
2.输出电压:三相交流电压 0-380V
3.额定电流:标称电流(面板上标称的电流)
4.输出电压可以无极调节,从而使电机实现无极调速
5、频率50~60HZ。
三.工作环境
1、环境温度:-25℃~+55℃。
2、空气相对湿度:≤85%(20℃±5℃)。
3、无显著冲击震动。
四.工作原理
三相调压器调速控制器主回路采用进口双向可控硅,改变可控硅的开放角大小,就能使电机或其它负载的工作电压从0至380V连续可调,也就实现了平衡地调压调速过程,以满足不同生产的工艺要求。
在可控硅控制电路中采用了先进的集成电路,加入了电
流回馈, 构成一个循环控制系统。
既提高了力矩电机的机械性硬度,又改善性能,同时还提高了力矩电机的超载能力,扩大了力矩电机的使用范围。
为了使调速过程尽快进入稳定状态,在控制回路中还加入了电压回馈以提高控制器的技术性能。
五.使用方法
1. 接线说明:请严格按以下接线示意图接线:D1、D2、D3三点为 控制器的输出端,接力矩电机;A 、B 、C 、为输入端接三相380V 电源。
N 为零线接口,接零线。
2.旋钮旋至零位。
3.总电源。
(指示灯亮)
4.控制开关,调节调速电位器旋钮,使电机达到你所需的速度。
5. 电位器为精密长寿电位器。
六.注意事项
1.严禁输出短路。
2.严禁使用中,负载电流超过过面板标称电流值。
3、严禁零线N 接入电机星点.
4、若控制器出现问题务必请专业人员检修,以免使故障范围扩大.
六.接线图
A B C D1D2D3A
B
C 输入 380V 输出 0~380V V 1U1W1W2
V 2U2力矩电机A B C D1D2D3A B C
输入 380V 输出 0~380V
V 1U1W1W2V 2U2力矩电机
N。