旋转轴绝对尺寸
激光打标机旋转轴配置参数【大全】

大家知道激光打标机旋转轴怎么配置参数吗?下面小编为大家简单介绍一下,希望对各位有所帮助。
打开“激光打标机旋转轴标刻”选项后软件会弹出如下图所示对话框:其中需注意的参数:工件直径:左键选定后会弹出对话框,需按照工件直径填入。
焦距:左键选定后会弹出对话框,需按照F-θ透镜的焦距填入。
注:这2个参数直接影响打标的效果。
标刻幅面有两种设定方式: 1使用均匀分割,通过设定分割尺寸来控制每次标刻幅面的大小。
(注意不要勾选“按分割线分割”栏,否则软件将按照分割线分割。
) 2使用分割线分割。
勾选后,软件会按照分割线进行打标。
在打标内容栏中左键连击2次会绘制分割线,在分割线附近点击右键会取消该分割线。
分割线与旋转轴方向相同。
“运动步长”相对于平台运动来说指的是当用户每一次按键盘移动扩展轴时要移动的距离,相对于转轴运动来说指的是运动的圆周距离。
按Pageup键可以增加运动步长,按Pagedown键可以减小运动步长。
当扩展轴为X轴时,按键盘CTRL+Left键一次可以使扩展轴X向左移动一个当前步长的距离;按键盘CTRL+Right键一次可以使扩展轴X向右移动一个当前步长的距离。
当扩展轴为Y轴时,按键盘CTRL+Down键一次可以使扩展轴Y向下移动一个当前步长的距离;按键盘CTRL+Up键一次可以使扩展轴Y向上移动一个当前步长的距离。
当扩展轴为Z轴时,按键盘CTRL+Down键一次可以使扩展轴Z向下移动一个当前步长的距离;按键盘CTRL+Up键一次可以使扩展轴Z向上移动一个当前步长的距离。
“零件”:显示框为灰色,即不可人为更改的显示,它表示当前加工工件的数目,是随计算机自动变化的。
它后面的“R”按钮为清零按钮。
“总数”:在使用“选择加工时,限定加工的总数,当加工数目达到要求时,软件自动停止加工。
“连续加工”勾选此项表示软件会不停的加工,直到人为停止。
“选择加工”勾选此项表示软件只加工在显示框中选中的内容。
点击参数后将出现对话框8-31。
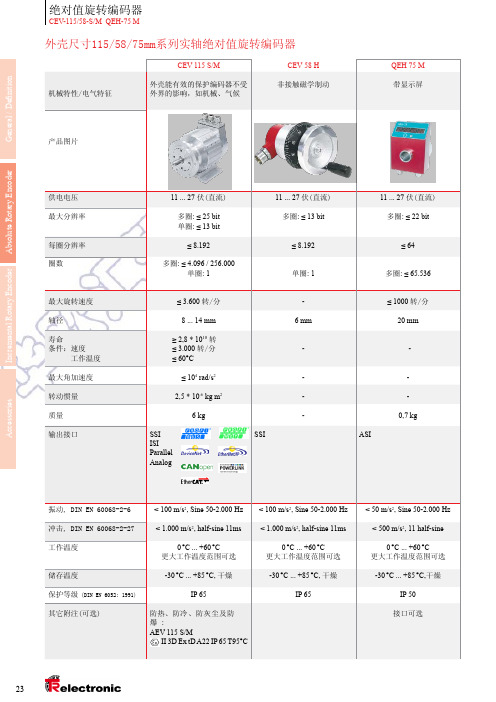
德国TR产品介绍
16 ... 27 mm ≥ 2,8 * 1010 ≤ 3.000 转/分 ≤ 60°C
≤ 104 rad/s2
67 * 10-6 kg m2
0,7 kg
SSI
11 ... 27 伏(直流)
多圈: ≤ 25 bit 单圈: ≤ 13 bit
≤ 8.192
多圈: ≤ 4.096 / 256.000 单圈: 1
冲击, DIN EN 60068-2-27
< 1.000 m/s2, half-sine
< 1.000 m/s2, half-sine
工作温度
0 °C ... +60 °C 更大工作温度范围可选
0 °C ... +60 °C 更大工作温度范围可选
储存温度
-30 °C ... +85 °C, 干燥
-30 °C ... +85 °C, 干燥
Incremental Rotary Encoder Absolute Rotary Encoder
绝对值旋转编码器
C_H-80-S/M QEH-80-S/M
外壳尺寸80mm系列空心轴轴绝对值旋转编码器
机械特性/电气特征
CEH 80 S/M
多种接口,空心轴尺寸大于 16mm
COH 80 S/M 高分辨率和精度
≤ 2.048 (4.096 optional)
多圈: ≤ 4.096 单圈: 1
≤ 6.000 转/分
8 ... 12 mm
≥ 3,9 * 1010 转 ≤ 6.000 转/分 ≤ 60°C
≤ 104 rad/s2
2,5 * 10-6 kg m2
0,3 kg ... 0,5 kg
数控铣床编程
模块八:数控铣床编程
单元一
数控铣床编程基础
2、数控铣床的加工工艺范围 (2)变斜角类零件 直纹曲面类零件是指由直线依某种规律移动所产生的曲面类零件。
Exit 7 GDGM 2005 © 2005 GDGM 机电
模块八:数控铣床编程
单元一
数控铣床编程基础
2、数控铣床的加工工艺范围 (3)曲面类零件 加工面为空间曲面的零件。采用两种加工方法:行切加工法、三 坐标联动加工法。
图1 行切加工法
图2
三坐标联动加工法
Exit
8
GDGM 2005
© 2005 GDGM 机电
模块八:数控铣床编程
单元一
数控铣床编程基础
1、夹具
(1)在选用夹具时应综合考虑产品的生产批量、生产效率、质量保证及经济性等问题。 (2)零件定位、夹紧的部位应不妨碍各部位的加工、刀具更换以及重要部位的测量。 (3)夹紧力应力求通过靠近主要支撑点或在支撑点所组成的三角形内。 (4)零件的装卡、定位要考虑到重复安装的一致性,以减少对刀时间,提高同一批零件 加工的一致性。
Exit 5 GDGM 2005 © 2005 GDGM 机电
模块八:数控铣床编程
单元一
数控铣床编程基础
2、数控铣床的加工工艺范围 (1)平面类零件 平面类零件是指加工面平行或垂直于水平面,以及 加工面与水平面的夹角为定角的零件,这类加工面可展开为 平面。
Exit 6 GDGM 2005 © 2005 GDGM 机电
四、数控铣床的工艺性分析
Exit 13 GDGM 2005 © 2005 GDGM 机电
模块八:数控铣床编程
单元一
数控铣床编程基础
四、数控铣床的工艺性分析 2、加工工序的划分 (1)刀具集中分序法 (2)粗、车加工分序法 (3)按加工部位分序法
翻译

"面角量","amount of divergence"
"放大电路","amplifier circuit"
"美国国家标准协会","AMSI(American National Standards Institute)"
"分析","analysis"
"近似曲线","approximate curve"
"八圆心近似椭圆","approximate eightcentered ellipse"
"四圆心近似椭圆","approximate fourcentered ellipse"
"近似长度","approximate length"
"近似值","approximation"
"分析图表","analytical chart"
"分析线图","analytical diagram"
"分析图","analytical graph"
"锚,固定器","anchor"
"固定螺栓","anchor bolt"
"固定板","anchor plate"
FANUC 0I参数
1010 1020 1022 1023
9988.4 9990.3
903#2 903#3 903#4 903#5 903#6 903#7 904#0 904#1 904#2 904#3 904#4 904#5 904#6 904#7 905#0 905#1 905#2 905#3 905#4 905#5 905#6 905#7 906#0 906#1 906#2 906#3 906#4 906#5 906#6 906#7 907#0 907#1 907#2
1420 1410
527
1422
1430 1431
1432
534
1425
533
1421
559-562
1423
518-521
1424
A6 关于加减速控制
522-525
1620
529
1622
635 952-954
1622 1621 1623
1624
1625
A7 关于SERVO
10.2
1800.1 CVR
A17 关于远 程诊断
A18 其他
2#0 201#0 201#1 201#2
203 204 211 212 213 221 222 223
RDG SB2 ASC NCR
0系列与0I系列参数对照表 目录 设定 传输0 传输1 传输2 行程极限 进给率 加减速控制
最新数控机床常用英语词汇

数控机床常用英语词汇------------------------------------------作者xxxx------------------------------------------日期xxxx数控机床常用英语词汇计算机数值控制 (Computerized Numerical Control, CNC)用计算机控制加工功能,实现数值控制。
2)轴(Axis)机床的部件可以沿着其作直线移动或回转运动的基准方向。
3)机床坐标系( Machine Coordinate Systern )固定于机床上,以机床零点为基准的笛卡尔坐标系。
4)机床坐标原点( Machine Coordinate Origin )机床坐标系的原点。
5)工件坐标系( Workpiece Coordinate System )固定于工件上的笛卡尔坐标系6)工件坐标原点( Wrok-piexe Coordinate Origin)工件坐标系原点。
7)机床零点( Machine zero )由机床制造商规定的机床原点。
8)参考位置( Reference Position )机床启动用的沿着坐标轴上的一个固定点,它可以用机床坐标原点为参考基准9)绝对尺寸(Absolute Dimension)/绝对坐标值(Absolute Coordinates)距一坐标系原点的直线距离或角度。
10)增量尺寸( Incremental Dimension ) /增量坐标值(Incremental Coordinates)在一序列点的增量中,各点距前一点的距离或角度值。
11)最小输人增量(Least Input Increment)在加工程序中可以输人的最小增量单位。
12)命令增量(Least command Increment)从数值控制装置发出的命令坐标轴移动的最小增量单位。
13)插补(InterPolation)在所需的路径或轮廓线上的两个已知点间根据某一数学函数(例如:直线,圆弧或高阶函数)确定其多个中间点的位置坐标值的运算过程。
西门子840D编程学习资料

对于一般的铣削和钻削机床,轴的线性运动具有下列方式:对于 5 轴机床,切削头也可以作旋转运动。
1.1.2 直线运动轴的命名a. A 轴:围绕X 轴的旋转运动b. B 轴:围绕Y 轴的旋转运动c. C 轴:围绕Z 轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X、Y、Z 轴构成的直角坐标系来描述。
按照标准DIN 66217 的规定,机床刀具运动为了定义一个位置,假定沿着坐标轴遵循一定的规则。
那幺现在就可以用指定的坐标方向(X、Y、Z 向)及三个资料描述坐标系上的每一点。
原点坐标为X0、Y0、Z0。
例如:例:图中的P1 至P3 点在这个例子中用下列坐标定义:在绝对坐标系中,所有点的坐标都是参考坐标系原点而来的,适用于刀具的运动。
它的含义为:用绝对坐标值描述的位置是刀具将要到达的位置。
例如:图中的P1 点至P3 点的绝对坐标为:X20 Y35(相对于原点的坐标X50 Y60(相对于原点的坐标X50 Y60 (相对于原点的坐标在加工图样中,经常用到相对坐标。
X20 Y35 (相对于原点的坐标值)X30 Y20 (相对于P1 点的坐标值)X20 Y-35(相对于P2 点的坐标值)坐标轴垂直于这个平面,决定刀具进给的方d. 当前零件坐标系在机械运动学中,编程中常用到坐标系的转换。
机床坐标系的设定与机床的类型有关,坐标轴的方向遵循右手的“三手指规则”(根据标准DIN 66217 )。
这些变换功能可以单独运用,也可以综合运用。
零件坐标系的位置与基本坐标系(或机床坐标系)的关系通过矩阵变换编程来决定。
在NC 程序中通过如G54 等指令调出或激活零件坐标系。
主坐标轴定义一个右手坐标系,刀具在这个坐标系中通过编程实现运动。
在数控加工技术中,主坐标轴被称为几何轴。
在这本编程手册中常用这种说法。
mach3 G代码和M代码说明

MACH3 G代码和M代码说明代码说明G代码代码G00 快速定位G01 直线切削G02 顺时针圆弧/螺旋切削G03 逆时针圆弧/螺旋切削G04 暂停G10 设定坐标原点G12 顺时针圆切削G13 逆时针圆切削G15/G16 极坐标指令G17 选择XY平面G18 选择XZ平面G19 选择YZ平面G20/G21 英制单位/公制单位G28 返回基准点G28.1 定义轴基准G30 返回第二基准点G31 直探头G32 切螺纹G40 取消刀具半径补偿G41/G42 启用刀具半径补偿左/右G50 重新设定缩放比例为1G51 设置轴数据输入缩放比例G52 选择临时坐标偏移G53 选择机床绝对坐标系G54 使用夹具偏移量1G55 使用夹具偏移量2G56 使用夹具偏移量3G57 使用夹具偏移量4G58 使用夹具偏移量5G59 使用夹具偏移量6/使用同样夹具偏移量G61/G64 精确停止模式/恒速模式G76 螺纹切削循环G77G80 取消移动模式(包括固定循环)G81 镗孔固定循环G82 可暂停镗孔固定循环G83 深孔钻削固定循环G84 右螺旋切削固定循环G85/G86/G88/G89 镗孔固定循环G90 绝对尺寸G91 增量尺寸G92 设置偏移量及参数G92.x 取消G92命令G94 每分钟仅给模式G95 每转进给模式G98 返回固定循环起始点G99 返回固定循环R点1、快速直线移动 - G00对于快速直线移动,程序G00X~Z~中的所有功能字,除了至少选用其中的一个外其它都为可选,如果当前移动模式为G00那么G00也是可选的,刀具可以以协调线性移动的方式以最大进给到达目的点,执行G00命令不会有切削动作发生。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有G53命令,刀具的移动也同与上述不同(见绝对坐标系)。
2、进给直线切削 - G01对于以进给直线切削来说,程序G01X~Z~中的所有功能字,除了必须至少使用的之外其它的轴功能字都为可选。
数控铣编程
线性轴
旋转轴
英制(G20)
英寸
度
公制(G21)
毫米
度
脉冲当量(G22)
移动轴脉冲当量
旋转轴脉冲当量
表4 尺寸输入制式及其单位
这3个G代码必须在程序的开头坐标系设定之前用单独的程序段指令。 G20,G21,G22不能在程序的中途切换。
二、数控铣床基本编程指令
二、数控铣床基本编程指令
三、进给控制指令 1、快速定位指令G00 格式:G00 X_Y_Z_A_ 其中,X、Y、Z、A为快速定位终点, G90时为终点在工件坐标系中的坐标; G91时为终点相对于起点的位移量。 G00为模态功能,可由G01、G02、G03或G33功能注销。
二、数控铣床基本编程指令
二、数控铣床基本编程指令
一、有关坐标和坐标系的指令 1、绝对值编程G90与相对值编程G91 格式: G90 G X Y Z G91 G X Y Z G90为绝对值编程,每个轴上的编程值是相对于程序原 点的。 G91为相对值编程,每个轴上的编程值是相对于前一位 置而言的,该值等于沿轴移动的距离。
一、数控机床编程基本知识 二、数控铣床基本编程指令 三、数控铣床常用编程指令 四、数控铣床编程实例 五、简化编程指令 六、宏指令编程 七、例题
数控机床编程基础
1、机床坐标轴 2、机床原点、参考点、机床坐标系 3、工件原点和工件坐标 4、绝对、增量编程 5、直径、半径编程 6、程序格式
一、数控编程基本知识
二、数控铣床基本编程指令
3、线性进给指令G01 格式: G01 X _Y_Z_A_F_ 其中,X、Y、Z、A、为终点, G90时为终点在工件坐标系中的坐标; G91时为终点相对于起点的位移量。 G01和F都是模态代码,G01可由G00、G02、G03或G33功能注销。
【精选】轴、轴承座与轴承配合公差
内圈m6 n6 p6 外圈H7 G7K7这是正常内圈旋转的配合外圈旋转时内圈h6 k6外圈M6 N6双H配合一般不要采用因为国内加工能力不行孔和轴尺寸和形状达不到要求的话会跑外圈①当轴承内径公差带与轴公差带构成配合时,在一般基孔制中原属过渡配合的公差代号将变为过赢配合,如k5、k6、m5、m6、n6等,但过赢量不大;当轴承内径公差代与h5、h6、g5、g6等构成配合时,不在是间隙而成为过赢配合。
②轴承外径公差带由于公差值不同于一般基准轴,也是一种特殊公差带,大多情况下,外圈安装在外壳孔中是固定的,有些轴承部件结构要求又需要调整,其配合不宜太紧,常与H6、H7、J6、J7、Js6、Js7等配合。
附:一般情况下,轴一般标0~+0。
005 如果是不常拆的话,就是+0。
005~+0。
01的过盈配合就可以了,如果要常常的拆装就是过渡配合就可以了。
我们还要考虑到轴材料本身在转动时候的热胀,所以轴承越大的话,最好是-0。
005~0的间隙配合,最大也不要超过0。
01的间隙配合还有一条就是动圈过盈,静圈间隙0 前言滚动轴承是一种标准化部件,具有摩擦力小、容易起动及更换简便等优点。
我们在日常维修或从事机械设计时,合理、正确选择轴承配合是至关重要的。
1 轴承配合的选择方法正确选择轴承配合,对保证机器正常运转、提高轴承的使用寿命和充分利用轴承的承载能力关系很大。
滚动轴承配合的选择主要是根据轴承套圈承受负荷的性质和大小,并结合轴承的类型、尺寸、工作条件、轴与壳体的材料和结构以及工作温度等因素综合考虑。
(1)套圈是否旋转当轴承的内圈或外圈工作时为旋转圈,应采用稍紧的配合,其过盈量的大小应使配合面在工作负荷下不发生“爬行”,因为一旦发生爬行,配合表面就要磨损,产生滑动,套圈转速越高,磨损越严重。
轴承工作时,若其内圈或外圈为不旋转套圈,为了拆装和调整方便,宜选用较松的配合。
由于不同的工作温升,将使轴颈或外壳孔在纵向产生不同的伸长量。
编程镗铣类

西门子810D/840D编程(镗铣类)第一节西门子系统编程基础一、数控系统的功能编程语言符合DIN66025标准1、准备功能代码(G代码)准备功能代码是地址字母G后加数字表示。
(见下表:略)G代码按功能分为若干组。
G代码有两种模态:模态式G代码和非模态式G代码。
模态式G代码具有延续性,在后续程序块中,只要同组其他G代码未出现之前一直有效。
非模态式G代码,只限定在被指定的程序块中有效。
2、辅助代码(M代码)M代码是指用于机床控制的指令,如主轴起停,液压系统的控制等。
已径由控制器制造商分派给某些M功能(见下表)。
预先指定的M功能清单:M0* 编程停止M1* 任意停止M2* 主程序结束,返回程序开头部分M30* 程序结束,效果同M2M17* 子程序结束M3 主轴右转M40 自动换齿轮M4 主轴左转M41 齿轮1档M5 主轴停止M42 齿轮2档M6 换刀(系统设定)M43 齿轮3档M70 主轴接通坐标轴方式M44 齿轮4档程序块中最多5个M功能3、杂功能代码(F,S,T,D)(1)进给功能代码F表示进给速度,单位为mm/min(公制)或in/min(英制)。
如F80在米制时表示进给速度为80mm/min(2)主轴功能代码S表示主轴转速,单位是rev/min。
如S250表示主轴转速为250rev/min。
(3)刀具功代码T表示刀具选择代码。
如T5表示第5号刀具。
(4)刀具补偿功能代码D表示刀具补偿号。
如D6表示刀具补偿量用第6号。
4、固定循环代码第一类:钻镗循环CYCLE81~CLCLE89第二类:铣削循环CYCLE71~CLCLE72,SLOT1~ SLOT2,POCKET1~ POCKET4等第二节基本编程方法一、定位指令1.绝对/增量尺寸,G90/91绝对尺寸G90(模态)或X=AC(...)Y=AC(...)Z=AC(...)绝对尺寸(非模态)增量尺寸G91(模态)或X=IC(...)Y=IC(...)Z=IC(...)增量尺寸(非模态)参数解释X Y Z 要移动轴线名=AC=IC功能G90/91命令和非模态尺寸AC/IC用于指定坐标系作接近设定点运动。
几何量公差与检测第十版甘永立主编期末复习提纲

一、绪论1.互换性用公差来保证2.在满足功能要求的前提下,公差应该尽量规定的大一些,以获得最佳的技术经济效益3.互换性优点:缩短设计周期,降低成本,提高寿命等。
4.互换性不是在任何情况下都适用5.完全互换性简称互换性,以零部件装配或更换时不需要挑选或修配为条件6.不完全互换性简称有限互换性,可以用分组装配法,调整法或其他来实现7.分组装配时对应组零件可以互换,非对应组不能互换,零件互换围有限8.调整法是在装配或使用中,对某一零件按所需的尺寸进行调整,以达到装配精度要求9.标准化是互换生产的基础10.规定10进等比数列为优先数列,规定了5个系列(4个基本系列,1个补充系列):R5(),R10(),R20,R40,R8011.派生系列Rr/p(R10/3)公比,自1以后隔(3-1)个数从R10取一个优先数系(1与10合并)1.00 2.00 4.00 8.00 16.0 32.0…12.派生系列Rr/p(R5/2)公比,自1以后隔(2-1)个数从R5取一个优先数系(1与10合并)1.00 2.50 6.30 16.0 40.0 100…二、几何量测量基础1.完整的测量包括被测对象,计量单位,测量方法和测量精度四个要素2.量块和线纹尺都是量值传递媒介3.量块除了传递媒介之外,还可以用来检定和调整设备,也可以直接测量工件4.量块分级,量块的制造精度分为五级:K,0,1,2,3,K最高,3最低。
5.量块分等,量块的检定精度分为五等:1,2,3,4,5,1最高,5最低6.按“级”:量块的标称长度作为工作尺寸,按“等”:量块中心长度的实际尺寸作为工作尺寸7.“等”>“级”等级8.组合量块时为减少误差,一般使用不超过4块,从消去工作尺寸的最小尾数开始,逐一选取9.间接测量常用于受条件限制而无法进行直接测量的场合10.相对测量的测量精度比绝对测量精度要高11.综合测量适用于只要求判断合格与否,而不要得到具体误差值的场合12.绝对误差:评定或比较大小相同的被测几何量的测量精度13.相对误差:评定或比较大小不相同的被测几何量的测量精度,常用百分比表示三、孔/轴公差与配合1.孔大写,轴小写2.孔的公称尺寸D,上/下极限尺寸D max/D min;轴的上/下极限尺寸d max/d min。
数控编程基础系列教程
一、数控机床的坐标系关于数控机床的坐标轴和运动方向,ISO组织对作了统一的规定,并制订了ISO841标准;这与我国有关部门制定的相应标准JB3051-82相当。
(一)坐标轴及运动方向的规定1.机床上一个直线进给运动或一个圆周进给运动定义一个坐标,其中直线进给运动坐标轴为X、Y、Z轴,称为基本坐标轴,它们之间符合右手定则;围绕X、Y、Z轴旋转的圆周进给坐标轴分别为A、B、C轴,它们之间符合右手螺旋定则。
2.刀具相对运动,工件相对静止原则不同机床的进给运动部件不同,有的机床是刀具做实际的进给运动,如车床;有的是工作台带着工件做实际的进给运动,如铣床。
机床坐标轴的正向规定前提:假定工件静止,刀具相对于工件作进给运动;如要表示刀具固定,工件运动的坐标,则用X′ Y′ Z′ A′ B′ C′来表示。
按相对运动关系,由于工件运动方向与刀具运动方向相反,所以有:+X= -X′+Y= -Y′ +Z= -Z′+A= -A′ +B= -B′ +C= -C′3.附加坐标轴X 、Y、 Z 基本坐标系又称第一坐标系,它表示最靠近主轴的坐标系。
此外,若有平行于基本坐标系、稍远于主轴的坐标系称为第二坐标系,其坐标轴用U、V、W轴表示,称为扩展轴,它们分别平行于X 、Y、 Z轴。
若还有平行于基本坐标系、更远于主轴的坐标系称为第三坐标系,其坐标轴用P、 Q、R轴表示,它们也分别平行于X 、Y、 Z轴。
同理,A、B、C 称为第一回转坐标系;若有其它回转运动轴则用D轴、E 轴、F轴表示。
(二)数控机床坐标轴的确定:1. Z坐标轴A.对于有且只有一个主轴的机床,则规定平行于机床主轴的坐标轴为Z坐标轴;Z轴正方向是假定工件不动,刀具远离工件的方向;B.若机床上没有主轴,则规定垂直于工件装夹面的坐标轴为Z轴;C.若机床上有几根主轴:则规定选垂直于工件装夹面的一根主轴作为主要主轴,Z轴即为平行于主要主轴的坐标轴。
2. X坐标轴: X坐标轴都是水平的A. 对于刀具旋转的机床若Z轴是垂直的(立式机床),则规定从主轴向立柱看去,X轴正方向指向右边;若Z轴是水平的(卧式机床),则规定从主轴(刀具)的后端向工件看去,X轴正方向指向右边。
艾迪科-绝对值系列 CANopen 编码器使用说明书

威海艾迪科电子科技股份有限公司多圈CANopen编码器使用说明书1.工作原理采用永久磁铁和磁感应元件,经过磁电转换,将轴的角度位移转换成电信号输出。
2.用途及特点本产品可以广泛用于各种自动控制、监控领域、测量领域,如机械制造、船舶、纺织、印刷、航空、军工、试验机、电梯等。
本产品具有抗震动、耐腐蚀、耐污染、体积小成本低、可靠性高、结构简单等特点。
3.产品型号说明法兰形式为半空心轴板簧安装,主尺寸为58mm;出线方式为电缆侧出,空心轴直径为12mm,多圈绝ADK-K58L12-MA12/13B4CLP3.1机械参数允许最大机械转速启动力矩(N·M)轴最大负荷转动惯量(Kg·m2)重量(Kg)轴向径向3000r/min9.8×10-429.4N19.6N8.0×10-70.23.2电气参数电源电压单圈分辨率多圈分辨率输出形式8-30V13位12位CANopen3.3环境参数工作温度储存温度最大湿度防护等级)-25℃~85℃-25℃~85℃85%无凝露IP54 3.4接线表(编码器接线颜色定义以编码器外壳标签为准)信号DC8~30V GND(0V)CAN-H CAN-L线色红黑白灰4.CANopen使用说明本类编码器遵循“编码器设备行规Class2”,一般都用作从设备。
对于本手册未涉及的内容,请参考文档“CiA标准规范301”和“CiA标准规范406”(这两个规范可以从网站得到)的相关部分。
4.1EDS文件EDS文件与CANopen编码器一起提供给客户,在试用CANopen编码器前请在CANopen主控制器上安装EDS文件。
4.2状态机该CANopen设备可以处于不同的工作状态,通过向它发送特定的NMT报文,可以在不同的工作状态之间切换。
状态图如下所示:序号描述(1)上电(2)初始化完成,自动发送启动信息(3)N MT报文“启动远程节点”(4)N MT报文“进行预运行”(5)N MT报文“关闭远程节点”(6)N MT报文“复位节点”或“复位通讯”4.2.1初始化这是上电或硬件复位后,CANopen设备首次进入的状态。
数控铣床编程代码及使用方法
图 1 机床坐标轴
一、数控机床编程基础
CJK6032坐标轴
+Z
+X
+
+
二、数控编程基本知识
ZJK-7532立式铣床轴的定义
+Z +X
+Y
图2 华中I型ZJK7532铣床坐标系统
二、数控编程基本知识
2、机床参考点、机床零点、机床坐标系
机床参考点:为了正确地在机床工作时建立机床坐标系,通 常在每个坐标轴的移动范围内设置一个固定的机械的机床 参考点(测量起点),(该点系统不能确定其位置)
10
15
70
100
N12 G01 X29
N13 G02 X19 Y24 R10
(N13 G02 X19 Y24 J10)
N14 G00 Z50
N15 X0 Y0
N16 M30
五、数控铣床常用编程指令
5、螺旋线进给
格GG式11:78 G19
G02 G03
X _Y _ Z _X _ Y_Z_
I _ J _
3、线性进给指令G01 ➢格式: G01 X _Y_Z_A_F_ 其中,X、Y、Z、A、为终点, G90时为终点在工件坐标系中的坐标; G91时为终点相对于起点的位移量。 G01和F都是模态代码,G01可由G00、G02、G03或 G33功能注销。
五、数控铣床常用编程指令
4、圆弧进给指令G02,G03
➢ 圆弧进给
格式:
GG1178 G19
G02 G03
X _Y _
X
_
Z
_
Y
_
Z
_
I _ J _
I _ K _
J _ K _
数控车床说明
第1章 数控机床加工程序编制基础数控机床是一种高效的自动化加工设备,它严格按照加工程序,自动的对被加工工件进行加工。
我们把从数控系统外部输入的直接用于加工的程序称为数控加工程序,简称为数控程序,它是机床数控系统的应用软件。
与数控系统应用软件相对应的是数控系统内部的系统软件,系统软件是用于数控系统工作控制的,它不在本教程的研究范围内。
数控系统的种类繁多,它们使用的数控程序语言规则和格式也不尽相同,本教程以ISO国际标准为主来介绍加工程序的编制方法。
当针对某一台数控机床编制加工程序时,应该严格按机床编程手册中的规定进行程序编制。
1.1 数控程序编制的概念在编制数控加工程序前,应首先了解:数控程序编制的主要工作内容,程序编制的工作步骤,每一步应遵循的工作原则等,最终才能获得满足要求的数控程序(如图1.1所示的程序样本)。
图1.1 程序样本1.1.1 数控程序编制的定义编制数控加工程序是使用数控机床的一项重要技术工作,理想的数控程序不仅应该保证加工出符合零件图样要求的合格零件,还应该使数控机床的功能得到合理的应用与充分的发挥,使数控机床能安全、可靠、高效的工作。
1、数控程序编制的内容及步骤数控编程是指从零件图纸到获得数控加工程序的全部工作过程。
如图1.2所示,编程工作主要包括:图1.2 数控程序编制的内容及步骤(1)分析零件图样和制定工艺方案这项工作的内容包括:对零件图样进行分析,明确加工的内容和要求;确定加工方案;选择适合的数控机床;选择或设计刀具和夹具;确定合理的走刀路线及选择合理的切削用量等。
这一工作要求编程人员能够对零件图样的技术特性、几何形状、尺寸及工艺要求进行分析,并结合数控机床使用的基础知识,如数控机床的规格、性能、数控系统的功能等,确定加工方法和加工路线。
(2)数学处理在确定了工艺方案后,就需要根据零件的几何尺寸、加工路线等,计算刀具中心运动轨迹,以获得刀位数据。
数控系统一般均具有直线插补与圆弧插补功能,对于加工由圆弧和直线组成的较简单的平面零件,只需要计算出零件轮廓上相邻几何元素交点或切点的坐标值,得出各几何元素的起点、终点、圆弧的圆心坐标值等,就能满足编程要求。
数控编程基础知识
3.2.2机床坐标系与工件坐标系
Hale Waihona Puke 机床坐标系是机床的硬件系统建立的坐标系统,是 固定于机床自身的光栅或者编码器的零点建立起来 的。数控机床中一般使用G53做为机床坐标系。 工件坐标系是在机床坐标系的基础上人为设置的, 就是在机床坐标系中建立新的坐标系统,常见的有 G54-G59,还有G54.1,G54.2等等。 工件坐标系是为了方便的进行工件加工而设置的临 时坐标系,可以通过系统的坐标系设置界面随时更 改。 数控机床使用哪个坐标系,要看加工程序中选择的 是哪个。
3.进给功能(F) 进给功能也称F功能,用于指定机床进给速度的大小,它由 地址码F和后面若干位数字组成。该指令是续效代码,一般 有两种表示方法: (1)代码法 F后面跟两位数字,表示机床进给速度数列的序号,它不直 接表示进给速度的大小。 (2)直接代码法 F后面的数字就是进给速度的大小。目前大多数数控机床采 用这种方法。 4.主轴转速功能(S) 用来指定主轴的转速,用字母S和其后的1—4位数字表示。 有恒转速和恒线转速两种指令。S代码只是设定主轴转速的 大小,并不会使主轴转动,必须用M03(主轴正转)指令或 M04(主轴反转)指令时,主轴才开始转动。该指令也为续 效代码。
5.刀具功能(T) 刀具功能也称T功能,主要用来选择刀具,也可用 来选择刀具偏置和补偿,由地址码和若干位数字组 成。 在自动换刀的数控机床中,该指令用于选择所需的 刀具,同时还用来指定刀具补偿值。一般加工中心 程序中T代码的数值直接表示选择的刀具号码。 例如T15表示15号刀。在数控车床中的T代码后面的 数字即包含所选刀具号,也包含刀具补偿号,例如 T0402表示选择04号刀,调用02号刀补偿参数进行 刀具长度和半径的补偿。 不同的数控系统有不同的指定方法和含义,具体应 用时应参照所用数控机床说明书中的有关规定进行。
西门子数控编程实例,工厂内部培训

目 录第一章 基础知识11.1西门子840D系统程序命名规则11.2 快速定位指令 G00(模态指令)11.3直线插补指令 G01(模态指令)21.4 圆弧/螺旋线插补 G02/G03(模态指令)TURN(非模态指令)21.5 暂停指令 G04 (模态指令)41.6 准确停止 G09 (非模态指令)、G60,G601, G602, G603(模态指令)41.7 G17、G18、G19 加工平面选择(模态指令)51.8 G40、G41、G42刀具半径补偿(模态指令)61.9 G53、G153、SUPA(非模态指令) G500(模态指令)61.10 G54~G57、G505~G599工件坐标系(模态指令)71.11 G64,G641,G642, G643, G644 连续路径加工(模态指令)81.12 G70/G71/G700/G710英制/公制(模态指令)91.13 G90/G91绝对/增量尺寸(模态指令)91.14 G94/G95 进给单位(模态指令)91.15 G110、G111、G112极坐标(非模态指令)91.16 FRAME框架指令(非模态指令)101.17 ABS绝对值(实数)121.18 ACC加速度倍率(模态指令)121.19 DC, ACP, ACN旋转轴绝对尺寸(非模态指令)131.20 ATAN2(Y,X)反正切(实数)141.21 CIP中间点圆弧插补(模态指令)141.22 CT切线过渡的圆弧(模态指令)151.23具程序重复的子程序:P161.24模态子程序:MCALL161.25间接调用子程序:CALL161.26可切换的几何轴,GEOAX171.27运行定位轴, POS, POSA, POSP171.28等待直至完成移动WAITP(…)181.29等待设定通道中的标记WAITM181.30定位主轴:SPOS(模态指令), M19 和 SPOSA(模态指令)WAITS191.31内部预处理程序停止201.32算术参数R与程序跳转GOTO211.33子程序L、M17、RET231.34程序段重复REPEATB与REPEAT241.35 交换轴,交换主轴 (RELEASE, GET, GETD)271.36通过框架变量转换坐标291.37预定义框架变量 (¥P_BFRAME, ¥P_IFRAME, ¥P_PFRAME, ¥P_ACTFRAME)301.38预定义可设定框架¥P_UBFR321.39框架变量/框架赋值331.40读取和修改框架组件 (TR, FI, RT, SC, MI)341.41五轴转换功能TRAORI35第二章 测量与赋值362.1测量循环概要CYCLE977 、CYCLE978362.2供给参数372.3结果参数392.4参数的赋值¥P_UIFR42第三章 标准循环453.1钻通孔循环CYCLE81453.2钻盲孔循环CYCLE82453.3钻深孔循环CYCLE83463.4刚性攻丝螺纹循环CYCLE84463.5柔性攻丝螺纹循环CYCLE840473.6铰孔循环CYCLE85473.7精镗孔循环CYCLE86483.8镗孔循环CYCLE87(镗孔止孔底主軸和进给停止,按启动键退刀)483.9镗孔循环CYCLE88493.10铰盲孔循环CYCLE89493.11螺纹铣削循环CYCLE90493.12铣长形孔LONGHOLE503.13从圆心向外辐射长槽SLOT1513.14圆周槽SLOT2523.15钻矩阵孔循环HOLSE1533.16钻均等孔循环HOLES2533.17铣平面循环CYCLE7154第四章 基础篇编程实例554.1 G111极坐标平面钻孔实例554.2 G2/G3铣圆弧面加工574.3 CYCLE84攻丝编程实例594.4 CYCLE86精镗孔加工实例614.5 G2/G3整圆加工实例634.6 CYCLE83钻深孔加工实例654.7调用万能铣头加工674.8坐标轴旋转加工694.9 HOLSE1钻矩阵孔循环实例714.10 REPEAT程序段重复加工实例724.11 CHF倒角加工实例744.12 CHR倒角加工实例754.13 RND倒圆角加工实例774.14 MIRROR镜像加工实例79第五章 提高篇编程实例815.1有条件程序跳转编程815.2(R参数)椭圆加工实例825.3(R参数)圆柱表面加工845.4(R参数)凸轮加工实例865.5(R参数)腔体加工实例875.6(R参数)斜面加工实例885.7(R参数)球面加工实例895.8(R参数)椭圆球面加工实例905.9 B轴找正(高级编程)925.10 探测自动建立坐标(高级编程)945.11综合加工实例(一)975.12综合加工实例(二)995.13综合加工实例(三)1015.14综合加工实例(四)1035.15综合加工实例(五)1055.16综合加工实例(六)107附录111西门子840d出口版本111第四章课后练习题参考答案119M代码一览表125指令大全127书名《西门子840d数控编程实例》介绍:本书共156页,线圈装订。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转轴在绝对坐标系中以逆时针方向逼近程序所指定的位置。
注:0~360°旋转范围必须在机床数据中指定(模态记忆)。G91或IC必须在程序中指明,以使旋转轴在程序中以大于360°的角度旋转。你可以在前面的叙述中看到更多的有关说明。
注:旋转轴的正向旋转方向(顺时针或逆时针)可源自在机床数据中设定。 ACN
绝对尺寸,逆时针方向逼近终点位置
功能
利用上述参数你可以定义旋转轴按各种不同的方式逼近指定位置。
利用DC的绝对尺寸编程
旋转轴在绝对坐标系中以沿着最近的方向逼近程序指定的位置。旋转轴运动通过的区域不超过180°。
利用ACP的绝对尺寸编程
旋转轴在绝对坐标系中以顺时针方向逼近程序所指定的位置。
备注:
你也可以用DC、ACP、ACN将主轴定向到指定位置。
程序格式
A=DC(__) B=DC(__) C=DC(__)
或
A=ACP(__) B=ACP(__) C=ACP(__)
或
A=ACN(__) B=ACN(__) C=ACN(__)
参数说明
A B C
将要运动的旋转轴名称
DC
绝对尺寸,直接逼近终点位置
ACP
绝对尺寸,顺时针方向逼近终点位置