步进电机接线图
L298N的详细资料驱动直流电机和步进电机

L298N的详细资料驱动直流电机和步进电机电机驱动电路;电机转速控制电路(PWM信号)主要采用L298N,通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,输入引脚与输出引脚的逻辑关系图为驱动原理图--------------------------------------------------------L298N电机驱动模块图•••1.1 实物图••1.2 原理图•••1.3 各种电机实物接线图•••1.4 各种电机原理图•••1.5 模块接口说明•••L298N电机驱动模块图1.1 实物图正面背面1.2 原理图1.3 各种电机实物接线图直流电机实物接线图4相步进电机实物接线图3相步进电机实物接线图1.4各种电机原理图直流电机原理图步进电机原理图1.5 模块接口说明+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
1和15和8引脚直接接地,4管脚VS接2.5到46的电压,它是用来驱动电机的,9引脚是用来接4.5到7V的电压的,它是用来驱动L298芯片的,记住,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的6和11引脚是它的使能端,一个使能端控制一个电机,至于那个控制那个你自己焊接,你可以把它理解为总开关,只有当它们都是高电平的时候两个电机才有可能工作,5,7,10,12是298的信号输入端和单片机的IO口相连,2,3,13,14是输出端,输入5和7控制输出2和3, 输入的10,12控制输出的13,14L298N型驱动器的原理及应用L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。
步进电机接线图
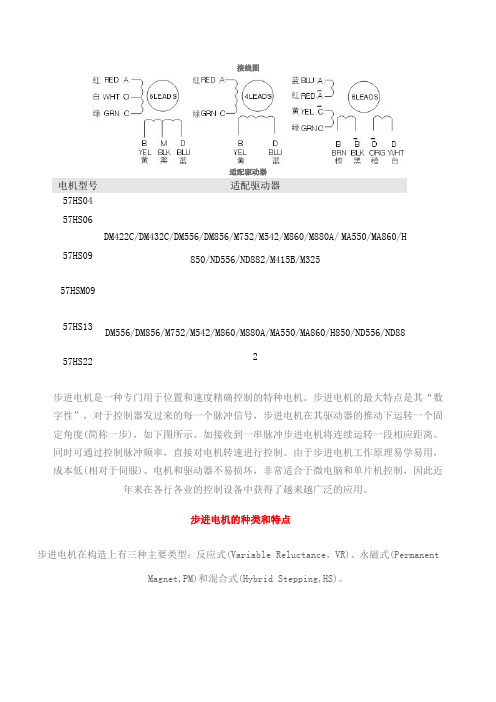
接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M32557HS0657HS0957HSM0957HS13DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88257HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(PermanentMagnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
步进电机原理接线

2相四线,四相五线,四相六线步进电机接线及驱动方法分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
步进马达
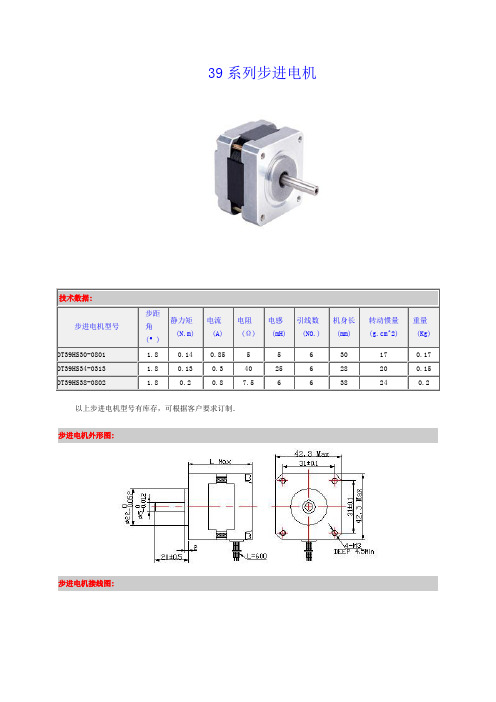
技术数据:
步进电机型号
步距角
(°)
静力矩
(N.m)
电流
(A)
电阻
(Ω)
电感
(mH)
引线数
(NO.)
机身长
(mm)
转动惯量
(g.cm^2)
重量
(Kg)
DT39HS30-0801
1.8
0.14
0.85
5
5
6
30
17
0.17
DT39HS34-0313
1.8
0.13
0.3
40
25
6
28
20
0.15
(g.cm^2)
重量
(Kg)
DT42HS30-0902
1.8
0.2
0.95
3.9
3.6
6
30
27
0.18
DT42HS40-0503
1.8
0.3
0.5
3
3
6
40
54
0.24
DT42HS40-0903
1.8
0.3
0.9
5.7
6.8
6
40
48
0.27
DT42HS48-1204
1.8
0.4
1.2
3.2
25
6
额定电流/相
(A)
相阻抗
(ohms±0%)
相感抗
(mH±20%)
长度
(mm)
转动
惯量
(g.cm^2)
重量
(Kg)
DT86HS65-4035
3.5
4.0
0.7
3.9
65
电机传动实验-PLC步进电动机控制实验

PLC步进电动机控制实验一、步进电机与步进电机驱动器的接线图步进电机驱动器与PLC连接,SH-2H042Ma步进电机驱动器的输入信号为CP+、CP-和DIR+、DIR-,其连接方式有三种:①共阳极方式:把CP+和DIR+接在一起作为共阳端OPTO(接外部系统的+5V),脉冲信号接入CP-端,方向信号接入DIR-端;②共阴极方式:把CP-和DIR-接在一起作为共阴端(接外部系统的GND),脉冲信号接入CP+端,方向信号接入DIR+端;③差动方式:直接连接。
二、PLC接线图PLC接线图(带驱动器)PLC 接线图(不带驱动器,输出电源电压应与步进电动机额定电压匹配) SB1为启动按钮,SB2为停止按钮,SB3为加速按钮,SB4为减速按钮。
三、按带驱动器的PLC 接线图的方式编写PLC 程序四、附录:采用西门子S7-300PLC 控制三相步进电机的过程例子电路说明:输出: A 相加电压:Q0.0B 相加电压:Q0.1C 相加电压:Q0.2 启动指示灯:Q0.3三相单三拍运行方式:Q0.4三相双三拍运行方式:Q0.5 三相单六拍运行方式:Q0.6 输出脉冲显示灯: Q0.7三相单三拍运行方式三相双三拍运行方式三相单六拍运行方式编程方法:1.使用定时器指令实现各种时序脉冲的要求:使用定器产生不同工作方式下的工作脉冲,然后按照控制开关状态输出到各相对应的输出点控制步进电机。
M0.0作为总控制状态位,控制脉冲发生指令是否启动。
一旦启动,采用T0、T1、T2以及它们的组合可以得到三相单三拍和三相双三拍的两种工作方式下,各相的脉冲信号。
如T0的状态为三相单三拍工作状态下A相的脉冲。
同理可使用类似程序得到三相单六拍时各相所需的脉冲信号。
2.使用移位指令实现各相所需的脉冲信号。
例如在MW10中进行移位,每次移位的时间为1秒钟。
如图为三相单六拍正向时序流程图,三相单三拍可利用相同的流程图,从M11.1开始移位,每次移两位,而三相双三拍从M11.2开始,每次移两位。
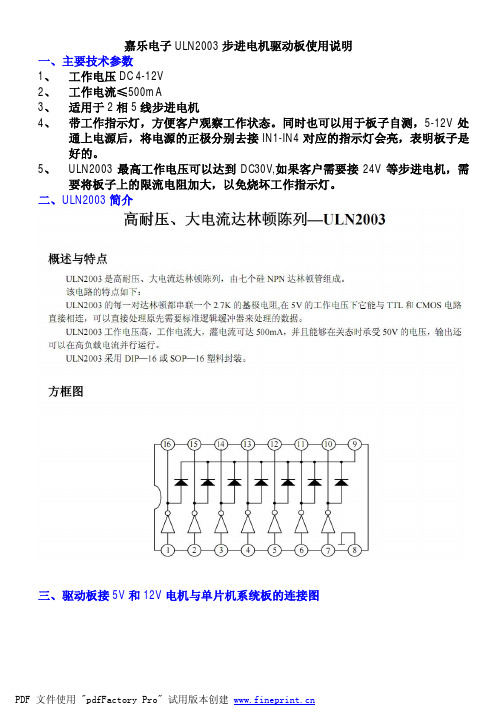
ULN2003步进电机接线图
void Delay(unsigned int i)//延时 { while(--i); }
main()
{
unsigned char i;
while(1)
{
for(i=0;i<4;i++)
//4 相
{
P1=F_Rotation[i]; //输出对应的相 可以自行换成反转表格
Delay(500);
//改变这个参数可以调整电机转速
//八拍方式驱动,顺序为 A AB B BC C CD D DA
unsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};
void Delay(unsigned int i)//延时 { while(--i); }
三、驱动板接 5V 和 12V 电机与单片机系统板的连接图
PDF 文件使用 "pdfFactory Pro" 试用版本创建
四、步进电机工作方式 电机可以使用单四拍、双四拍和八拍方式驱动 4.1 单四拍: A-B-C-D (0001、0010、0100、1000) #include <reg52.h>
}
}
}
4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001) #include <reg52.h>
unsigned char code F_Rotation[4]={0x03,0x05,0x0D,0x09};//正转表格
unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//反转表格
}
步进电机接线图

雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。
雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。
引线数
相电流
电阻(Ω)
电感(mH)
长度L(mm)
转子惯量(g.cm2)
重量(kg)
适配驱动器
串联
并联
二相ห้องสมุดไป่ตู้
35
35HS01
0.07
1.8
4
0.4
35
8.0
28
12
0.17
M415B/DM320/M325
39
39HS02
0.065
1.8
4
0.6
15
16
34
20
0.18
M415B/DM320/M325
42
76
460
1.0
57HS22
2.2
1.8
8
2.8
5.6
0.67
1.8
76
480
1.1
86
86HS35
3.0
1.8
8
2.0
4.0
1.4
3.9
65
800
2.0
DM556/DM856/M752/
M860/M880A/MA550/
MA860/H850/MA860H/
两相步进电机详细参数及接线图
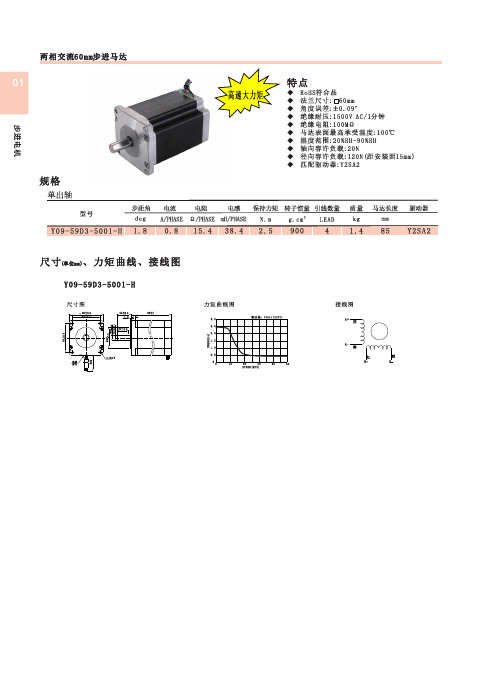
特点◆ 径向容许负载:90N(距安装面15mm)◆ RoHS 符合品◆ 安装孔距:47.14mm◆ 绝缘电阻:100MΩ◆ 匹配驱动器:Y2SD2◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:500V AC /1分钟◆ 角度误差:±0.09°◆ 轴向容许负载:20N◆ 法兰尺寸:□60mm规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 绝缘耐压:1500V AC /1分钟特点◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N◆ 径向容许负载:320N(距安装面20mm)◆ 湿度范围:20%RH-90%RH◆ RoHS 符合品◆ 匹配驱动器:Y2SD3 or Y2SA2◆ 法兰尺寸:□86mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。
步进电机控制PCI卡接线图
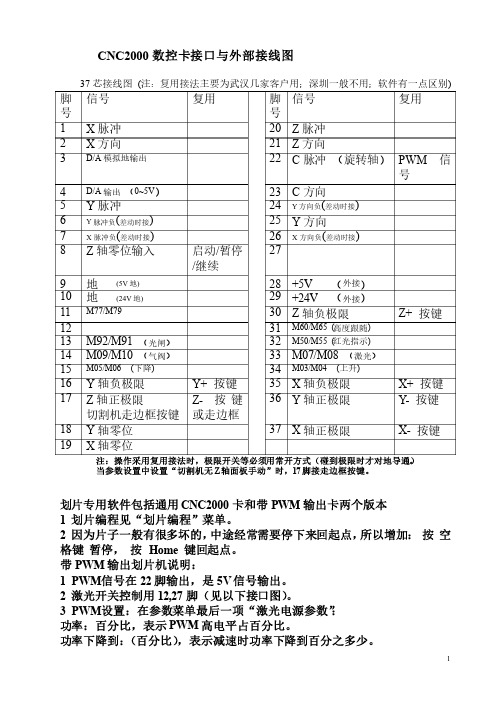
CNC2000数控卡接口与外部接线图37芯接线图芯接线图 (注:注:复用接法主要为武汉几家客户用;复用接法主要为武汉几家客户用;复用接法主要为武汉几家客户用;深圳一般不用;深圳一般不用;深圳一般不用;软件有一点区别软件有一点区别) 脚号信号信号复用 脚号 信号 复用1 X 脉冲脉冲20 Z 脉冲脉冲2 X 方向方向21 Z 方向方向3 D/A 模拟地输出模拟地输出 22 C 脉冲脉冲 (旋转轴)(旋转轴) PWM信号4 D/A 输出输出 (0~5V )23 C 方向方向5 Y 脉冲脉冲24 Y 方向负(差动时接)6 Y 脉冲负(差动时接) 25 Y 方向方向7 X 脉冲负(差动时接)26 X 方向负(差动时接) 8 Z 轴零位输入轴零位输入 启动/暂停/继续继续27 9 地 (5V 地)28 +5V (外接)10 地 (24V 地)29 +24V (外接)11 M77/M79 30 Z 轴负极限轴负极限Z+ 按键按键 12 31 M60/M65 (高度跟随) 13 M92/M91 (光闸) 32 M50/M55 (红光指示) 14 M09/M10 (气阀) 33 M07/M08 (激光)15 M05/M06 (下降) 34 M03/M04 (上升) 16 Y 轴负极限轴负极限 Y+ 按键按键 35 X 轴负极限轴负极限X+ 按键按键 17 Z 轴正极限轴正极限切割机走边框按键切割机走边框按键 Z- 按键或走边框或走边框 36 Y 轴正极限轴正极限Y - 按键按键 18 Y 轴零位轴零位 37 X 轴正极限轴正极限 X- 按键按键 19 X 轴零位轴零位注:操作采用复用接法时,极限开关等必须用常开方式(碰到极限时才对地导通)。
当参数设置中设置“切割机无Z 轴面板手动”时,17脚接走边框按键。
划片专用软件包括通用CNC2000卡和带PWM 输出卡两个版本 1 划片编程见“划片编程”菜单。
2 因为片子一般有很多坏的,中途经常需要停下来回起点,所以增加: 按 空格键 暂停, 按 Home 键回起点。
步进电机接线图

∙o接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND882/M415B/M325 57HS06 57HS0957HSM0957HS13 DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND882 57HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
∙步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
雷赛步进42接线图

•步距精度+5%(整步、空载)温升80°CMax环境温度-10°C -- +50°C绝缘电阻100MΩmin.500VDC耐压500VAC for one minute 径向跳动0.06 Max.(450g-load) 轴向跳动0.08 max.(450g-load)•技术规格Model No.相数步距角保持转矩额定电流相电感相电阻引线数量转子惯量定位转矩电机重量机身长(°)N.M A mH Ohm g.cm2 Kg.cm Kg mm42HS02 2 1.8 0.22 0.4 21 12.5 4 57 0.15 0.24 40 42HSM02 2 0.9 0.24 0.87 7.5 3.1 4 38 0.15 0.23 34 42HS03 2 1.8 0.34 1 4 4.6 8 0.2 200 0.34 48•外形尺寸引线接法••接线图••步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
步进电机的接线

步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机接线图 Final revision by standardization team on December 10, 2020.
接线图
适配驱动器
电机型号 适配驱动器
57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H
850/ND556/ND882/M415B/M325
57HS06
57HS09
57HSM09
57HS13
DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88
2
57HS22
步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近
年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点
步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(Permanent
Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式
定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动
态性能差、效率低、发热大,可靠性难保证。
* 永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动
态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能
好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步距角为°/步,配上半步驱动器后,步距角减少为°,配上细分驱动器后其步距角可细分达256倍°/微步)。
由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进
电机可配不同细分的驱动器以改变精度和效果。
雷赛步进电机系列
雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35 -130范围。
具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。
可满足不同行业、不同环境下的使用需求。
雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。
两相步进电机命名规则
<>
上例表示机座号为57mm,两相混合式,步距角为度,扭矩,设计序号01,单边出轴的电机。
三相步进电机命名规则
<>
上例表示机座号为57mm,三相混合式,步距角为度,扭矩,设计序号01,单边出轴的电机。
两相步进电机选型列表
相数外型型号静扭
矩(N
M)
步距
角(o)
引线
数
相电流
电阻
(Ω)
电感
(mH)
长度L
(mm)
转子惯量
重量
(kg)
适配驱动器串联并联
二相35
35HS0
1
4 3
5 28 12
M415B/DM320/M
325
39
39HS0
2
4 1
5 1
6 34 20
M415B/DM320/M
325
42
42HS0
4 21 40 57
DM320/DM422C/
2 DM432C/ DM556
/DM856/ ND556
/ M415B/M325 42HS0
3
8 48 82
57 57HS0
6
8 55 145
DM422C/DM432C
/DM556/ DM856
/M752/M542/ M
860/M880A/MA5
50/ MA860/H85
0/ND556/ ND88
2/M415B/M325 57HS0
9
8 54 260
57HS1
3
8 76 460
57HS2
2
8 76 480
86 86HS3
5
8 65 800
DM556/DM856/M
752/ M860/M88
0A/MA550/ MA8
60/H850/MA860
H/ ND882/ND11
82/ND2282/ M5
35/MD2278 86HS3
8
8 71 1200
86HS4
5
8 1400
86HS8
5
8 118 2800
110 110HS
12
12 4 15 99 5500
MA860H/ND1182
/ND2282/MD227
8
110HS
20
20 4 150 11000
MA860H/ND1182
/ND2282/MD227
8
130 130HS
27
27 4 227 35000 13 ND2282/MD2278 130HS
45
45 4 283 48400 19 ND2282/MD2278
三相步进电机选型列表
相数外
型
型号
静扭
矩(N
M)
步距
角(o)
引
线
数
相电流
电阻
(Ω)
电感(m
H)
长度L
(mm)
转子惯量
重量(k
g)
适配驱动器
串
联
并联
三
相57
573S05 6 50 110
3DM683/3ND583
/3ND883 573S09 6 56 300
3DM683/3ND583
/3ND883 573S15 6 76 480 3DM683/3ND583
/3ND883
86 863S22 6 71 1100
3DM683/3ND583
/3ND883/ 3ND11
83/3ND2283 863S42 6 103 2320
863S68
H
6 33 135 3300
怎样选择步进电机和驱动器
判断需多大力矩:静扭矩是选择步进电机的主要参数之一。
负载大时,需采用大力矩电
机。
力矩指标大时,电机外形也大。
判断电机运转速度:转速要求高时,应选相电流较大、电感较小的电机,以增加功率输
入。
且在选择驱动器时采用较高供电电压。
选择电机的安装规格:如57,86,110等,主要与力矩要求有关。
确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。
根据电机的电流、细分和供电电压选择驱动器。