坐标系转换c语言作业
三点法 平面坐标转换 c语言
三点法平面坐标转换 c语言平面坐标转换可以使用三点法进行计算。
三点法的基本原理是通过已知的三个点的坐标来确定一个平面的转换方程,然后通过该方程将其他点的坐标转换到该平面上。
以下是使用C语言实现三点法平面坐标转换的示例代码:```c#include <stdio.h>// 定义二维坐标结构体typedef struct Point {double x;double y;} Point;// 三点法平面坐标转换函数void convert(Point A, Point B, Point C, Point P, Point *Q) {double a, b, c, d, e, f;double k, l, m;// 计算转换方程的系数a = A.x - B.x;b = A.y - B.y;c = A.x - C.x;d = A.y - C.y;e = P.x - C.x;f = P.y - C.y;// 计算转换方程的常数k = (e * (a * a + b * b) - a * (c * e + d * f)) / (a * d - b * c); l = (f * (a * a + b * b) - b * (c * e + d * f)) / (a * d - b * c); m = -(a * k + b * l + a * A.x + b * A.y);// 根据转换方程计算转换后的坐标Q->x = P.x + k;Q->y = P.y + l;}int main() {// 定义三个已知点和待转换点Point A = {1, 1};Point B = {2, 3};Point C = {4, 2};Point P = {3, 4};// 定义转换后的坐标点Point Q;// 进行坐标转换convert(A, B, C, P, &Q);// 输出转换后的坐标printf("转换后的坐标为:%lf, %lf\n", Q.x, Q.y);return 0;}```在上述代码中,我们首先定义了一个包含x和y坐标的二维坐标结构体Point。
矿区坐标七参数转换的C语言程序实现
矿区坐标七参数转换的C语言程序实现作者:李海艳李超来源:《科学与财富》2011年第09期[摘要] GPS测量得到的是WGS-84坐标,而在矿区施工中通常使用地方独立坐标,因此只有将其转换到地方坐标系下的高斯平面坐标,才能便于实际的应用。
为了寻求适合于矿区坐标转换的可靠方法,本文介绍了WGS-84坐标与地方独立坐标之间的七参数转换的C语言程序实现与方法。
[关键词] WGS-84 地方坐标七参数 C语言1、平面坐标转换1.1WGS—84坐标WGS—84坐标的几何定义是:原点位于地球质心,Z轴指向国际时间局(BIH)1984.0定义的协议地极(CTP)方向,X轴指向BIH1984.0的协议子午面和CTP赤道的交点,Y轴与Z 轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系。
1.2地方独立坐标系在城市测量和工程测量中,若直接在国家坐标系中建立控制网,有时会使地面长度的投影变形较大,难以满足实际或工程上的需要。
为此,往往需要建立地方独立坐标系,尤其在大部分矿区,控制网采用的是地方坐标系,它的中央子午线一般选在该矿区的中心,有的选在矿区的平均高程面,坐标定向在当地的正北方向。
这样形成的当地坐标系使测量和绘制在地形图上的结果和实际地形相一致,使投影形变为最小。
所以利用GPS做矿山控制测量或工程测量时,为了适应测量的要求,必须将获得的WGS—84坐标转换为当地的独立坐标,这就需求定变换参数和进行相应的坐标转换。
2、七参数转换模型2.1WGS—84空间直角坐标转换到地方独立坐标的基本思路是:3、七参数转换C语言程序编写定义坐标系结构体,用矩阵zq实现数据的储存和读取,进行转换4、实例分析利用淮南某矿的实测坐标数据对程序进行分析:从七个控制点中选取三个同名点进行坐标参数的计算,相应的数据如下表1。
相应的地方独立坐标及误差见表2。
5、结论1)计算得到WGS—84坐标系与地方独立坐标系转换七参数,转换精度高,已经运用到淮南矿区测量的工程中,具有良好的可靠性。
大地坐标转换c代码
以下是一个大地坐标转换的C代码示例,它可以将经度、纬度和高程转换为笛卡尔坐标系中的x、y和z坐标。
```c#include <stdio.h>#include <math.h>#define RADIUS_EARTH 6371000.0 // 地球半径,单位为米void cartesian_coords(double longitude, double latitude, double height, double *x, double *y, double *z) {double r = RADIUS_EARTH + height; // 计算半径double sin_lat = sin(latitude * M_PI / 180.0);double cos_lat = cos(latitude * M_PI / 180.0);double sin_lon = sin(longitude * M_PI / 180.0);double cos_lon = cos(longitude * M_PI / 180.0);*x = r * cos_lon * cos_lat;*y = r * sin_lon * cos_lat;*z = r * sin_lat;}int main() {double longitude = 120.0; // 经度double latitude = 30.0; // 纬度double height = 0.0; // 高程,单位为米double x, y, z; // 笛卡尔坐标系中的x、y和z坐标cartesian_coords(longitude, latitude, height, &x, &y, &z);printf("经度:%lf\n", longitude);printf("纬度:%lf\n", latitude);printf("高程:%lf\n", height);printf("x坐标:%lf\n", x);printf("y坐标:%lf\n", y);printf("z坐标:%lf\n", z);return 0;}```该代码使用了地球半径和球面三角学公式将大地坐标转换为笛卡尔坐标系中的x、y和z坐标。
gcj2和wgs84坐标系之间的转换公式c语言版
gcj2和wgs84坐标系之间的转换公式c语言版位于地球上的每一个点都可以用经度和纬度来表示其位置。
经度和纬度是地球表面上的坐标系统,被用于导航、地图制作和各种其他应用程序。
然而,由于地球并非完全规则的球体,而是稍微偏扁的椭圆体,所以在实际使用中需要考虑到这种不规则性。
为了更准确地表示地球表面上的位置,人们开发了不同的坐标系统,其中包括gcj2和wgs84。
这两种坐标系统在其表示方式和精度上略有不同,因此需要进行转换。
在实际应用中,尤其是在地图和导航应用中,经常需要将gcj2和wgs84之间进行转换,以确保准确性和一致性。
gcj2是中国国家测绘局制定的一种坐标系统,通常用于中国境内地图。
而wgs84是世界大地测量系统标准使用的坐标系统,用于全球定位系统(GPS)等全球性应用中。
由于这两种坐标系统之间存在微小的差异,因此在使用时需要进行转换以确保数据的准确性。
在实际应用中,进行gcj2和wgs84之间的转换通常会使用特定的数学公式和算法。
其中,最常用的是基于数学原理和地球椭球体模型来计算经度和纬度之间的转换关系。
这些公式可以用不同的程序语言来实现,包括C 语言。
为了实现gcj2和wgs84坐标系之间的转换,可以编写一个简单的C语言程序。
该程序可以接受输入的gcj2坐标,并将其转换为wgs84坐标,或者接受wgs84坐标并将其转换为gcj2坐标。
通过使用合适的数学公式和算法,可以实现较高精度的坐标转换,并确保数据的准确性和一致性。
在实际开发和应用中,gcj2和wgs84坐标系之间的转换是一个非常重要的问题。
它涉及到地图制作、导航系统、地理信息系统等广泛的领域,对于确保位置数据的准确性和一致性具有重要意义。
因此,对于gcj2和wgs84坐标系之间转换的研究和实践具有重要的理论和实际意义。
梳理一下本文的重点,我们可以发现,gcj2和wgs84坐标系之间的转换是一个重要且复杂的问题,需要对数学原理和地球椭球体模型有深入的了解,同时需要通过程序实现具体的转换算法。
机械优化设计坐标轮换发c语言

/*多维黄金分割法子程序*/
void mhjfgf(int n,float a[],float b[],float flag,float x[]) { int i; float x1[m],x2[m],f1,f2,sum; for(i=0;i<n;i++) /*计算初始两试点*/ x1[i]=b[i]-(float)0.618*(b[i]-a[i]); f1=f(x1); for(i=0;i<n;i++) x2[i]=a[i]+(float)0.618*(b[i]-a[i]); f2=f(x2); do { if(f1=f2) /*判断消去区间*/ { /*消去右*/ for(i=0;i<n;i++) b[i]=x2[i]; for(i=0;i<n;i++) x2[i]=x1[i]; f2=f1; for(i=0;i<n;i++) x1[i]=b[i]-(float)0.618*(b[i]-a[i]); f1=f(x1); } else { /*消去左*/ for(i=0;i<n;i++) a[i]=x1[i]; for(i=0;i<n;i++) x1[i]=x2[i]; f1=f2; for(i=0;i<n;i++) x2[i]=a[i]+(float)0.618*(b[i]-a[i]); f2=f(x2); } sum=0; for(i=0;i<n;i++) sum+=(b[i]-a[i])*(b[i]-a[i]); }while(sqrt(sum)>flag); /*判断是否未达到精度要求,若未达到则返回继续缩小区间*/ for(i=0;i<n;i++) x[i]=(float)0.5*(b[i]+a[i]); /*已达到,输出极小点*/
用C怎样进行坐标转换啊
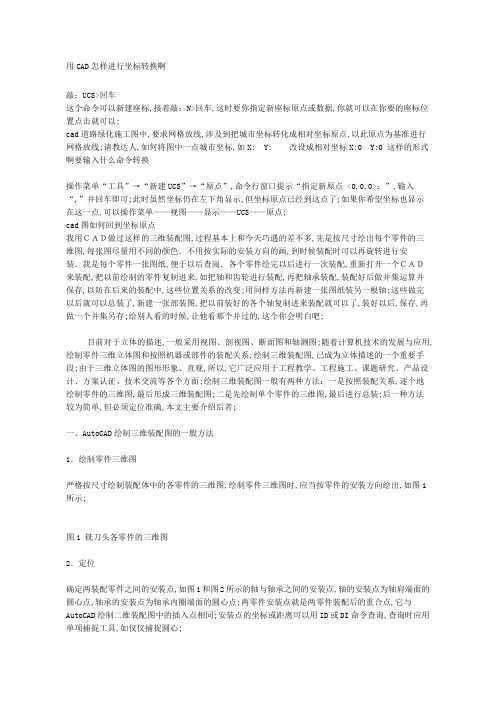
用CAD怎样进行坐标转换啊敲:UCS>回车这个命令可以新建座标,接着敲:N>回车,这时要你指定新座标原点或数据,你就可以在你要的座标位置点击就可以;cad道路绿化施工图中,要求网格放线,涉及到把城市坐标转化成相对坐标原点,以此原点为基准进行网格放线;请教达人,如何将图中一点城市坐标,如X: Y: 改设成相对坐标X:0 Y:0 这样的形式啊要输入什么命令转换操作菜单“工具”→“新建UCS”→“原点”,命令行窗口提示“指定新原点 <0,0,0>:”,输入“,”并回车即可;此时虽然坐标仍在左下角显示,但坐标原点已经到这点了;如果你希望坐标也显示在这一点,可以操作菜单——视图——显示——UCS——原点;cad图如何回到坐标原点我用CAD做过这样的三维装配图,过程基本上和今天巧遇的差不多,先是按尺寸绘出每个零件的三维图,每张图尽量用不同的颜色.不用按实际的安装方向的画,到时候装配时可以再旋转进行安装.我是每个零件一张图纸,便于以后查阅.各个零件绘完以后进行一次装配,重新打开一个CAD来装配,把以前绘制的零件复制进来,如把轴和齿轮进行装配,再把轴承装配,装配好后做并集运算并保存,以防在后来的装配中,这些位置关系的改变;用同样方法再新建一张图纸装另一根轴;这些做完以后就可以总装了,新建一张部装图,把以前装好的各个轴复制进来装配就可以了,装好以后,保存,再做一个并集另存;给别人看的时候,让他看那个并过的,这个你会明白吧;目前对于立体的描述,一般采用视图、剖视图、断面图和轴测图;随着计算机技术的发展与应用,绘制零件三维立体图和按照机器或部件的装配关系,绘制三维装配图,已成为立体描述的一个重要手段;由于三维立体图的图形形象、直观,所以,它广泛应用于工程教学、工程施工、课题研究、产品设计、方案认证、技术交流等各个方面;绘制三维装配图一般有两种方法:一是按照装配关系,逐个地绘制零件的三维图,最后形成三维装配图;二是先绘制单个零件的三维图,最后进行总装;后一种方法较为简单,但必须定位准确,本文主要介绍后者;一、AutoCAD绘制三维装配图的一般方法1.绘制零件三维图严格按尺寸绘制装配体中的各零件的三维图,绘制零件三维图时,应当按零件的安装方向绘出,如图1所示;图1 铣刀头各零件的三维图2.定位确定两装配零件之间的安装点,如图1和图2所示的轴与轴承之间的安装点,轴的安装点为轴肩端面的圆心点,轴承的安装点为轴承内圈端面的圆心点;两零件安装点就是两零件装配后的重合点,它与AutoCAD绘制二维装配图中的插入点相同;安装点的坐标或距离可以用ID或DI命令查询,查询时应用单项捕捉工具,如仅仅捕捉圆心;图2 将三维视点调整到装配主干线的顶视图方向,确定安装点1、2轴的安装点 3、7端盖的安装点 4、6轴承的安装点 7垫圈的安装点8带轮的安装点 9座体的安装点 10铣刀的安装点3.总装用AutoCAD安装零件和装配零件实物一样,首先应确定装配主干线和装配顺序;再应用移动命令Move 将零件移到安装位置; 移动的基点为一个零件的安装点,如轴承内圈端面的圆心点, 移动的第二个点为另一零件的安装点,如轴肩端面圆心点,这样便可将零件逐个装配好;用移动命令Move进行安装时,安装点的座标可以用DI命令查询后输入,但应用捕捉工具捕捉安装点更为准确快捷;三、举例现以图1所示的铣刀头为例介绍三维装配图绘制方法;1.绘制零件的三维图首先严格按尺寸绘制所有零件的三维图;如轴、轴承、座体等;键可以和轴一起绘出;应当注意:1三维装配图剖切表示方法与二维装配图表示方法的区别;如图1中铣刀头座体、轴承、端盖等零件的三维图,仅旋转270°;2各零件应按装配位置的方向绘制三维图,如图1中轴的轴线方向与轴承的轴线方向为同一方向; 2.将三维视点调整到装配主干线的顶视图方向,如图2所示的方向;3.根据两装配零件间的装配关系确定各零件的安装点,如图2中的文字说明;4.铣刀头三维装配图安装过程Command: 点取View工具条中的Top view图标,显示装配主干线径向的顶视图Command: Move↙回车Select object: 选取图2中下面的轴承↙Specify base point or displacement:捕捉轴承的内圈上端面的圆心点,即轴承的安装点Specify second point of displacement or :捕捉轴φ44轴肩下端面的圆心点,即轴的安装点执行结果,轴承便可准确地装配在轴上;用同样的方法安装另一个轴承,如图3所示;图3 将轴承安装在轴上其他零件安装过程与轴安装在轴上的过程相同,简述如下:Command:Move→选取安装零件→捕捉安装点Base Point→捕捉另一零件的安装点Second Point,完成一个零件的安装→……;图4为装配完毕的铣刀头顶视图;图5为经喧染后的铣刀头三维装配图;。
空间直角坐标系与空间大地坐标系的相互转换及其C++源程序
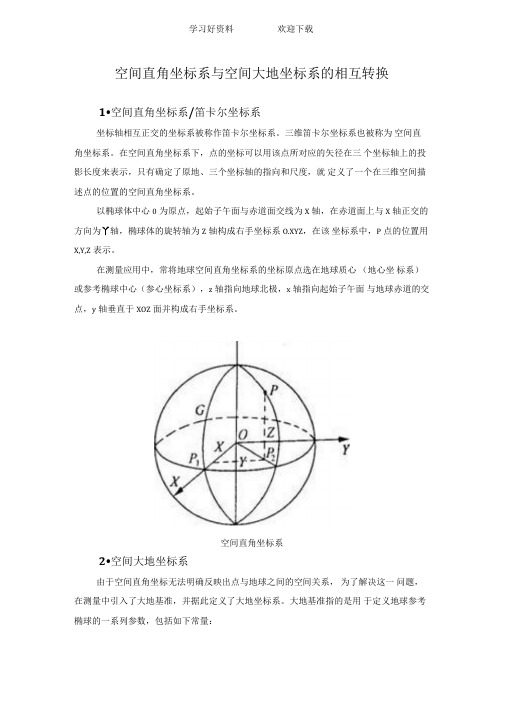
空间直角坐标系与空间大地坐标系的相互转换1.空间直角坐标系/笛卡尔坐标系坐标轴相互正交的坐标系被称作笛卡尔坐标系。
三维笛卡尔坐标系也被称为空间直角坐标系。
在空间直角坐标系下,点的坐标可以用该点所对应的矢径在三个坐标轴上的投影长度来表示,只有确定了原地、三个坐标轴的指向和尺度,就定义了一个在三维空间描述点的位置的空间直角坐标系。
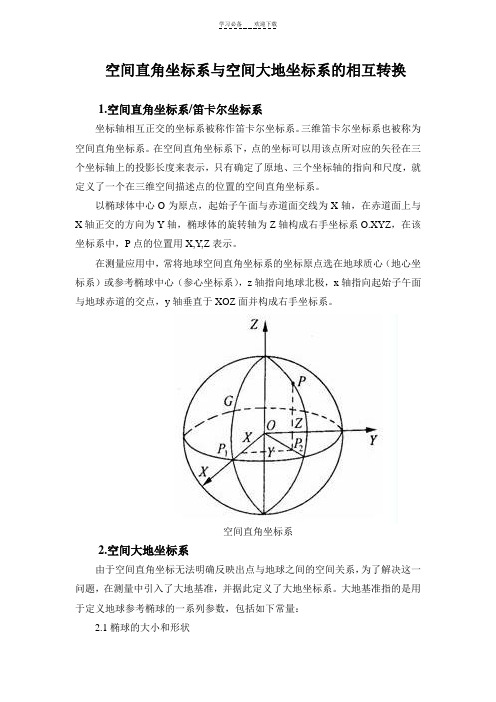
以椭球体中心O为原点,起始子午面与赤道面交线为X轴,在赤道面上与X轴正交的方向为Y轴,椭球体的旋转轴为Z轴构成右手坐标系O.XYZ,在该坐标系中,P点的位置用X,Y,Z表示。
在测量应用中,常将地球空间直角坐标系的坐标原点选在地球质心(地心坐标系)或参考椭球中心(参心坐标系),z轴指向地球北极,x轴指向起始子午面与地球赤道的交点,y轴垂直于XOZ面并构成右手坐标系。
空间直角坐标系2.空间大地坐标系由于空间直角坐标无法明确反映出点与地球之间的空间关系,为了解决这一问题,在测量中引入了大地基准,并据此定义了大地坐标系。
大地基准指的是用于定义地球参考椭球的一系列参数,包括如下常量:2.1椭球的大小和形状2.2椭球的短半轴的指向:通常与地球的平自转轴平息。
2.3椭球中心的位置:根据需要确定。
若为地心椭球,则其中心位于地球质心。
2.4本初子午线:通过固定平极和经度原点的天文子午线,通常为格林尼治子午线。
以大地基准为基础建立的坐标系被称为大地坐标系。
由于大地基准又以参考椭球为基准,因此,大地坐标系又被称为椭球坐标系。
大地坐标系是参心坐标系,其坐标原点位于参考椭球中心,以参考椭球面为基准面,用大地经度L、纬度B 和大地高H表示地面点位置。
过地面点P的子午面与起始子午面间的夹角叫P 点的大地经度。
由起始子午面起算,向东为正,叫东经(0°~180°),向西为负,叫西经(0°~-180°)。
过P点的椭球法线与赤道面的夹角叫P点的大地纬度。
由赤道面起算,向北为正,叫北纬(0°~90°),向南为负,叫南纬(0°~-90°)。
大地坐标与空间直角坐标转换_C程序

scanf("%lf",&y);
printf("请输入Z:\n");
scanf("%lf",&z);
l=atan2(y,x);
do{m=(z+a1*e*e*g/sqrt(1+g*g-e*e*g*g))/sqrt(x*x+y*y);
m1=atan(m);
b=HD(a,b1,c);
printf("请输入H:\n");
scanf("%lf",&h);
w=sqrt((1-e*e*sin(b)*sin(b)));
n=a1/w;
x=(n+h)*cos(b)*cos(l);
y=(n+h)*cos(b)*sin(l);
z=(n*(1-e*e)+h)*sin(b);
void lbhxyz(double a1,double e)
{double l,b,h,x,y,z,a,b1,c,n,w;
printf("请输入L:\n");
scanf("%lf%lf%lf",&a,&b1,&c);
l=HD(a,b1,c);
printf("请输入B:\n");
scanf("%lf%lf%lf",&a,&b1,&c);
e=sqrt(e2);
if (b==1)lbhxyz(a1,e);
else if(b==2)xyzlbh(a1,e);}
大地坐标与空间直角坐标的转换程序代码
#include "stdio、h"#include "math、h"#include "stdlib、h"#include "iostream"#define PI 3、14323double a,b,c,e2,ep2;int main(){int m,n,t;double RAD(double d,double f,double m);void RBD(double hd);void BLH_XYZ();void XYZ_BLH();void B_ZS();void B_FS();void GUS_ZS();void GUS_FS();printf(" 大地测量学\n");sp1:printf("请选择功能:\n");printf("1、大地坐标系到大地空间直角坐标的转换\n");printf("2、大地空间直角坐标到大地坐标系的转换\n");printf("3、贝塞尔大地问题正算\n");printf("4、贝塞尔大地问题反算\n");printf("5、高斯投影正算\n");printf("6、高斯投影反算\n");printf("0、退出程序\n");scanf("%d",&m);if(m==0)exit(0);sp2:printf("请选择椭球参数(输入椭球序号):\n");printf("1、克拉索夫斯基椭球参数\n");printf("2、IUGG_1975椭球参数\n");printf("3、CGCS_2000椭球参数\n");printf("0、其她椭球参数(自行输入)\n");scanf("%d",&n);switch(n){case 1:a=6378245、0;b=6356863、0188;c=6399698、9018;e2=0、297;ep2=0、468;break;case 2:a=6378140、0;b=6356755、2882;c=6399596、6520;e2=0、959;ep2=0、947;break;case 3:a=6378137、0;b=6356752、3141;c=6399593、6259;e2=0、290;ep2=0、547;break;case 0:{printf("请输入椭球参数:\n");printf("长半径a=");scanf("%lf",&a);printf("短半径b=");scanf("%lf",&b);c=a*a/b;ep2=(a*a-b*b)/(b*b);e2=(a*a-b*b)/(a*a);break;}default:printf("\n\n输入错误!\n请重新输入!\n\n");goto sp2 ;}while(1){switch(m){case 1:BLH_XYZ();break;case 2:XYZ_BLH();break;case 3:B_ZS();break;case 4:B_FS();break;case 5:GUS_ZS();break;case 6:GUS_FS();break;default:printf("\n\n输入错误!\n请重新输入!\n\n");goto sp1 ;}printf("就是否继续进行此功能计算? \n\n");printf("( 若继续进行此功能计算,则输入1;\n 若选择其她功能进行计算,则输入2;\n 若退出, 则输入0、)\n");scanf("%d",&t);switch(t){case 1:break;case 2:goto sp1;case 0:exit(0);}}}double RAD(double d,double f,double m) {double e;double sign=(d<0、0)?-1、0:1、0;if(d==0){sign=(f<0、0)?-1、0:1、0;if(f==0){sign=(m<0、0)?-1、0:1、0;}}if(d<0)d=d*(-1、0);if(f<0)f=f*(-1、0);if(m<0)m=m*(-1、0);e=sign*(d*3600+f*60+m)*PI/(3600*180);return e;}void RBD(double hd){int t;int d,f;double m;double sign=(hd<0、0)?-1、0:1、0;if(hd<0)hd=fabs(hd);hd=hd*3600*180/PI;t=int(hd/3600);d=sign*t;hd=hd-t*3600;f=int(hd/60);m=hd-f*60;printf("%d'%d'%lf'\n",d,f,m);}void BLH_XYZ(){double B,L,H,N,W;double d,f,m;double X,Y,Z;printf(" 请输入大地坐标(输入格式为角度(例如:30'40'50')):\n");printf(" 大地经度L=");scanf("%lf'%lf'%lf'",&d,&f,&m);L=RAD(d,f,m);printf(" 大地纬度B=");scanf("%lf'%lf'%lf'",&d,&f,&m);B=RAD(d,f,m);printf(" 大地高H=");scanf("%lf",&H);W=sqrt(1-e2*sin(B)*sin(B));N=a/W;X=(N+H)*cos(B)*cos(L);Y=(N+H)*cos(B)*sin(L);Z=(N*(1-e2)+H)*sin(B);printf("\n\n 转换后得到大地空间直角坐标为:\n\n");printf("X=%lf\nY=%lf\nZ=%lf\n\n",X,Y,Z);}void XYZ_BLH(){double B,L,H,N,W;double X,Y,Z;double tgB0,tgB1;printf(" 请输入大地空间直角坐标:\n");printf(" X=");scanf("%lf",&X);printf(" Y=");scanf("%lf",&Y);printf(" Z=");scanf("%lf",&Z);printf("\n\n 转换后得到大地坐标为:\n\n");L=atan(Y/X);printf(" 大地经度为: L=");RBD(L);printf("\n");tgB0=Z/sqrt(X*X+Y*Y);tgB1=(1/sqrt(X*X+Y*Y))*(Z+a*e2*tgB0/sqrt(1+tgB0*tgB0-e2*tgB0*tgB0));while(fabs(tgB0-tgB1)>5*pow(10,-10)){tgB0=tgB1;tgB1=(1/sqrt(X*X+Y*Y))*(Z+a*e2*tgB0/sqrt(1+tgB0*tgB0-e2*tgB0*tgB0));}B=atan(tgB1);printf(" 大地纬度为:B=");RBD(B);printf("\n");W=sqrt(1-e2*sin(B)*sin(B));N=a/W;H=sqrt(X*X+Y*Y)/cos(B)-N;printf(" 大地高为:H=%lf\n\n",H);}void B_ZS(){double L1,B1,A1,s,d,f,mi;double u1,u2,m,M,k2,alfa,bt,r,kp2,alfap,btp,rp;double sgm0,sgm1,lmd,lmd1,lmd2,A2,B2,l,L2;printf("请输入已知点的大地坐标(输入格式为角度(例如:30'40'50'),下同):\nL1=");scanf("%lf'%lf'%lf'",&d,&f,&mi);L1=RAD(d,f,mi);printf("\nB1=");scanf("%lf'%lf'%lf'",&d,&f,&mi);B1=RAD(d,f,mi);printf("请输入大地方位角:\nA1=");scanf("%lf'%lf'%lf'",&d,&f,&mi);A1=RAD(d,f,mi);printf("请输入该点至另一点的大地线长:\ns=");scanf("%lf",&s);u1=atan(sqrt(1-e2)*tan(B1));m=asin(cos(u1)*sin(A1));M=atan(tan(u1)/cos(A1));m=(m>0)?m:m+2*PI;M=(M>0)?M:M+PI;k2=ep2*cos(m)*cos(m);alfa=(1-k2/4+7*k2*k2/64-15*k2*k2*k2/256)/b;bt=k2/4-k2*k2/8+37*k2*k2*k2/512;r=k2*k2/128-k2*k2*k2/128;sgm0=alfa*s;sgm1=alfa*s+bt*sin(sgm0)*cos(2*M+sgm0)+r*sin(2*sgm0)*cos(4*M+2*sgm0); while(fabs(sgm0-sgm1)>2、8*PI/180*pow(10,-7)){sgm0=sgm1;sgm1=alfa*s+bt*sin(sgm0)*cos(2*M+sgm0)+r*sin(2*sgm0)*cos(4*M+2*sgm0); }sgm0=sgm1;A2=atan(tan(m)/cos(M+sgm0));A2=(A2>0)?A2:A2+PI;A2=(A1>PI)?A2:A2+PI;u2=atan(-cos(A2)*tan(M+sgm0));lmd1=atan(sin(u1)*tan(A1));lmd1=(lmd1>0)?lmd1:lmd1+PI;lmd1=(m<PI)?lmd1:lmd1+PI;lmd2=atan(sin(u2)*tan(A2));lmd2=(lmd2>0)?lmd2:lmd2+PI;lmd2=(m<PI)?(((M+sgm0)<PI)?lmd2:lmd2+PI):(((M+sgm0)>PI)?lmd2:lmd2+PI);lmd=lmd2-lmd1;B2=atan(sqrt(1+ep2)*tan(u2));kp2=e2*cos(m)*cos(m);alfap=(e2/2+e2*e2/8+e2*e2*e2/16)-e2/16*(1+e2)*kp2+3*e2*kp2*kp2/128;btp=e2*(1+e2)*kp2/16-e2*kp2*kp2/32;rp=e2*kp2*kp2/256;l=lmd-sin(m)*(alfap*sgm0+btp*sin(sgm0)*cos(2*M+sgm0)+rp*sin(2*sgm0)*cos(4*M+2*sg m0));L2=L1+l;printf("\n\n得到另一点的大地坐标与大地线在该点的大地方位角为:\n\n");printf("L2=");RBD(L2);printf("\n");printf("B2=");RBD(B2);printf("\n");printf("A2=");RBD(A2);printf("\n");}void B_FS(){double L1,B1,L2,B2,s,A1,A2,du,f,mi,m0,m,M;double l,u1,u2,alfa,bt,r,lmd0,dit_lmd,lmd,sgm,dit_sgm,sgm0,sgm1,alfap,btp,rp,k2,kp2;printf("请输入第一个点大地坐标(输入格式为角度(例如:30'40'50'),下同):\n大地经度L1=");scanf("%lf'%lf'%lf'",&du,&f,&mi);L1=RAD(du,f,mi);printf("大地纬度B1=");scanf("%lf'%lf'%lf'",&du,&f,&mi);B1=RAD(du,f,mi);printf("\n请输入第二个点大地坐标:\n大地经度:L2=");scanf("%lf'%lf'%lf'",&du,&f,&mi);L2=RAD(du,f,mi);printf("大地纬度:B2=");scanf("%lf'%lf'%lf'",&du,&f,&mi);B2=RAD(du,f,mi);l=L2-L1;u1=atan(sqrt(1-e2)*tan(B1));u2=atan(sqrt(1-e2)*tan(B2));sgm0=acos(sin(u1)*sin(u2)+cos(u1)*cos(u2)*cos(l));m0=asin(cos(u1)*cos(u2)*sin(l)/sin(sgm0));dit_lmd=0、003351831*sgm0*sin(m0);lmd0=l+dit_lmd;dit_sgm=sin(m0)*dit_lmd;sgm1=sgm0+dit_sgm;m=asin(cos(u1)*cos(u2)*sin(lmd0)/sin(sgm1));A1=atan(sin(lmd0)/(cos(u1)*tan(u2)-sin(u1)*cos(lmd0)));A1=(A1>0)?A1:A1+PI;A1=(m>0)?A1:A1+PI;M=atan(sin(u1)*tan(A1)/sin(m));M=(M>0)?M:M+PI;k2=ep2*cos(m)*cos(m);alfa=(1-k2/4+7*k2*k2/64-15*k2*k2*k2/256)/b;bt=k2/4-k2*k2/8+37*k2*k2*k2/512;r=k2*k2/128-k2*k2*k2/128;kp2=e2*cos(m)*cos(m);alfap=(e2/2+e2*e2/8+e2*e2*e2/16)-e2/16*(1+e2)*kp2+3*e2*kp2*kp2/128;btp=e2*(1+e2)*kp2/16-e2*kp2*kp2/32;rp=e2*kp2*kp2/256;sgm0=acos(sin(u1)*sin(u2)+cos(u1)*cos(u2)*cos(l));sgm1=acos(sin(u1)*sin(u2)+cos(u1)*cos(u2)*cos(l+sin(m)*(alfap*sgm0+btp*sin(sgm0)*cos( 2*M+sgm0))));while(fabs(sgm0-sgm1)>1*PI/180*pow(10,-8)){sgm0=sgm1;sgm1=acos(sin(u1)*sin(u2)+cos(u1)*cos(u2)*cos(l+sin(m)*(alfap*sgm0+btp*sin(sgm0)*cos( 2*M+sgm0))));}sgm=sgm1;lmd=l+sin(m)*(alfap*sgm+btp*sin(sgm)*cos(2*M+sgm));s=(sgm-bt*sin(sgm)*cos(2*M+sgm)-r*sin(2*sgm)*cos(4*M+2*sgm))/alfa;A1=atan(sin(lmd)/(cos(u1)*tan(u2)-sin(u1)*cos(lmd)));A1=(A1>0)?A1:A1+PI;A1=(m>0)?A1:A1+PI;A2=atan(sin(lmd)/(sin(u2)*cos(lmd)-tan(u1)*cos(u2)));A2=(A2>0)?A2:A2+PI;A2=(m<0)?A2:A2+PI;printf("\n\n得到两点间大地线长S与大地正反方位角A1、A2如下:\n\n");printf("s=%lf\n",s);printf("A1=");RBD(A1);printf("\n");printf("A2=");RBD(A2);printf("\n");}void GUS_ZS(){double B,L,x3,x6,y3,y6,Y3,Y6,du,f,mi,X,N,n,t;double At,Bt,Ct,Dt,m3,m6,l3,l6,W,L03,L06;int DH3,DH6;printf("请输入大地坐标(输入格式为角度(例如:30'40'50')):\n大地经度L=");scanf("%lf'%lf'%lf'",&du,&f,&mi);L=RAD(du,f,mi);printf("\n大地纬度B=");scanf("%lf'%lf'%lf'",&du,&f,&mi);B=RAD(du,f,mi);At=1+3*e2/4+45*e2*e2/64+175*e2*e2*e2/256;Bt=3*e2/4+15*e2*e2/16+525*e2*e2*e2/512;Ct=15*e2*e2/64+105*e2*e2*e2/256;Dt=35*e2*e2*e2/512;X=a*(1-e2)*(At*B-Bt*sin(2*B)/2+Ct*sin(4*B)/4-Dt*sin(6*B)/6);W=sqrt(1-e2*sin(B)*sin(B));N=a/W;n=sqrt(ep2)*cos(B);t=tan(B);DH3=(L-(1、5*PI/180))/(3*PI/180)+1;DH6=L/(6*PI/180)+1;L03=DH3*(3*PI/180);L06=DH6*(6*PI/180)-(3*PI/180);l3=L-L03;l6=L-L06;m3=cos(B)*l3;m6=cos(B)*l6;x3=X+N*t*(m3*m3/2+(5-t*t+9*n*n+4*n*n*n*n)*m3*m3*m3*m3/24+(61-58*t*t+t*t*t*t)* m3*m3*m3*m3*m3*m3/720);x6=X+N*t*(m6*m6/2+(5-t*t+9*n*n+4*n*n*n*n)*m6*m6*m6*m6/24+(61-58*t*t+t*t*t*t)* m6*m6*m6*m6*m6*m6/720);y3=N*(m3+(1-t*t+n*n)*m3*m3*m3/6+(5-18*t*t+t*t*t*t+14*n*n-58*n*n*t*t)*m3*m3*m3 *m3*m3/120);y6=N*(m6+(1-t*t+n*n)*m6*m6*m6/6+(5-18*t*t+t*t*t*t+14*n*n-58*n*n*t*t)*m6*m6*m6 *m6*m6/120);Y3=DH3*1000000+500000+y3;Y6=DH6*1000000+500000+y6;printf("\n\n 得到的高斯平面坐标为:\n\n");printf(" 对于3度带:\n 纵坐标x=%、3lf\n 横坐标y=%、3lf(通用坐标Y=%、3lf)\n\n",x3,y3,Y3);printf(" 对于6度带:\n 纵坐标x=%、3lf\n 横坐标y=%、3lf(通用坐标Y=%、3lf)\n\n",x6,y6,Y6);}void GUS_FS(){double x,y,Y,B,B0,B1,Bf,Vf,tf,Nf,nf,L,At,Bt,Ct,Dt,L3,L6;long DH;printf(" 请输入高斯平面坐标:\n\n");printf(" 纵坐标X=");scanf("%lf",&x);printf("\n");printf(" 自然坐标y=");scanf("%lf",&y);printf("\n");printf(" 通用坐标Y=");scanf("%lf",&Y);printf("\n");At=1+3*e2/4+45*e2*e2/64+175*e2*e2*e2/256;Bt=3*e2/4+15*e2*e2/16+525*e2*e2*e2/512;Ct=15*e2*e2/64+105*e2*e2*e2/256;Dt=35*e2*e2*e2/512;B0=x/(a*(1-e2)*At);B1=(x-a*(1-e2)*(-Bt*sin(2*B0)/2+Ct*sin(4*B0)/4-Dt*sin(6*B0)/6))/(a*(1-e2)*At);while(fabs(B1-B0)>1*pow(10,-8)){B0=B1;B1=(x-a*(1-e2)*(-Bt*sin(2*B0)/2+Ct*sin(4*B0)/4-Dt*sin(6*B0)/6))/(a*(1-e2)*At);}Bf=B1;nf=sqrt(ep2)*cos(Bf);tf=tan(Bf);Vf=sqrt(1+ep2*cos(Bf)*cos(Bf));Nf=c/Vf;B=Bf-Vf*Vf*tf/2*((y/Nf)*(y/Nf)-(5+3*tf*tf+nf*nf-9*nf*nf*tf*tf)*pow((y/Nf),4)/12+(61+90*tf *tf+45*tf*tf)*pow((y/Nf),6)/360);L=((y/Nf)-(1+2*tf*tf+nf*nf)*(y/Nf)*(y/Nf)*(y/Nf)/6+(5+28*tf*tf+24*pow(tf,4)+6*nf*nf+8*nf *nf*tf*tf)*pow((y/Nf),5)/120)/cos(Bf);DH=Y/1000000;L3=3*PI/180*double(DH)+L;L6=6*PI/180*double(DH)-3*PI/180+L;printf("\n\n 得到的大地坐标为:\n\n");printf(" 大地纬度B=");RBD(B);printf("\n");printf(" 若为6度带,大地经度L=");RBD(L6);printf("\n");printf(" 若为3度带,大地经度L=");RBD(L3);printf("\n"); }。
大地坐标与空间坐标转换c++程序
}
void kd()
{
double x,y,z,b1,b2,b,l,h;
cout<<"输入空间直角坐标X,Y,Z"<<endl;
cin>>x;
cin>>y;
cin>>z;
b1=atan(z/sqrt(x*x+y*y));
b2=atan(((A*E*sin(b1))/sqrt(1-E*pow(sin(b1),2))+z)/(sqrt(x*x+y*y)));
}
void dk()
{
double B,L,H,x,y,z;
cout<<"输入大地坐标B,L,H"<<endl;
cin>>B;
cin>>L;
cin>>H;
B=B*PAI/180;
L=L*PAI/180;
x=(A/sqrt(1-E*pow(sin(B),2))+H)*cos(B)*cos(L);
y=(A/sqrt(1-E*pow(sin(B),2))+H)*cos(B)*sin(L);
}
大地坐标与空间坐标转换c程序
#include<iostream>
#include<cmath>
#include<iomanip>
#include <math.h>
#define E 0.006693422 //E=e2
#define PAI 3.141592654
using namespace std;
int main()
c#坐标系互相转换
c#坐标系互相转换各种坐标系的各种转换public class TempGps{public double Tlng;public double Tlat;}public class GPS{public string oLng;//经度度分秒坐标public string oLat;//纬度度分秒坐标public double lng;//经度 WGS-84public double lat;//纬度 WGS-84public double gLng;//经度 GCJ-02 中国坐标偏移标准 Google Map、⾼德、腾讯使⽤public double gLat;//纬度 GCJ-02 中国坐标偏移标准 Google Map、⾼德、腾讯使⽤public double bLng;//经度 BD-09 百度坐标偏移标准,Baidu Map使⽤public double bLat;//纬度 BD-09 百度坐标偏移标准,Baidu Map使⽤public double PI = Math.PI;double xPI = Math.PI * 3000.0 / 180.0;public TempGps delta(TempGps t){var a = 6378245.0; // a: 卫星椭球坐标投影到平⾯地图坐标系的投影因⼦。
var ee = 0.00669342162296594323; // ee: 椭球的偏⼼率。
var dLat = this.transformLat(t.Tlng - 105.0, t.Tlat - 35.0);var dLng = this.transformLng(t.Tlng - 105.0, t.Tlat - 35.0);var radLat = t.Tlat / 180.0 * PI;var magic = Math.Sin(radLat);magic = 1 - ee * magic * magic;var sqrtMagic = Math.Sqrt(magic);return new TempGps() { Tlat = (dLat * 180.0) / ((a * (1 - ee)) / (magic * sqrtMagic) * PI), Tlng= (dLng * 180.0) / (a / sqrtMagic * Math.Cos(radLat) * PI) }; }//WGS-84 to GCJ-02public void gcj_encrypt(){if (this.outOfChina(lng, lat)){gLng = lng;gLat = lat;}var t = this.delta(new TempGps() { Tlng = lng, Tlat = lat });gLng = t.Tlng+lng;gLat = t.Tlat+lat;}//GCJ-02 to WGS-84public void gcj_decrypt(){if (this.outOfChina(gLng, gLat)){lng = gLng;lat = gLat;}var t = this.delta(new TempGps() { Tlng = gLng, Tlat = gLat });lng = gLng-t.Tlng;lat = gLat-t.Tlat;}//GCJ-02 to BD-09public void bd_encrypt(){double x = gLng;double y = gLat;double z = Math.Sqrt(x * x + y * y) + 0.00002 * Math.Sin(y * xPI);double theta = Math.Atan2(y, x) + 0.000003 * Math.Cos(x * xPI);bLng = z * Math.Cos(theta) + 0.0065;bLat = z * Math.Sin(theta) + 0.006;}//BD-09 to GCJ-02public void bd_decrypt(){double x = bLng - 0.0065;double y = bLat - 0.006;double z = Math.Sqrt(x * x + y * y) + 0.00002 * Math.Sin(y * xPI);double theta = Math.Atan2(y, x) - 0.000003 * Math.Cos(x * xPI);gLng = z * Math.Cos(theta);gLat = z * Math.Sin(theta);}//WGS-84 to 度分秒坐标public void wgs_decrypt(){oLng = TranDegreeToDMs(lng);oLat = TranDegreeToDMs(lat);}//度分秒坐标 to WGS-84public void wgs_encrypt(){lng = TranDMsToDegree(oLng);lat = TranDMsToDegree(oLat);}public double TranDMsToDegree(string _dms){string[] dms = _dms.Split('.');if (dms.Length > 2)return double.Parse(dms[0]) + double.Parse(dms[1]) / 60 + double.Parse(dms[2] + "." + dms[3] ?? "0") / 3600;elsereturn 0d;}private static string TranDegreeToDMs(double d){int Degree = Convert.ToInt16(Math.Truncate(d));//度d = d - Degree;int M = Convert.ToInt16(Math.Truncate((d) * 60));//分int S = Convert.ToInt16(Math.Round((d * 60 - M) * 60));if (S == 60){M = M + 1;S = 0;}if (M == 60){M = 0;Degree = Degree + 1;}string rstr = Degree.ToString() + ".";if (M < 10)rstr = rstr + "0" + M.ToString();elserstr = rstr + M.ToString();if (S < 10)rstr = rstr + "0" + S.ToString();elserstr = rstr + S.ToString();return rstr;}private bool outOfChina(double _lng, double _lat){if (lng < 72.004 || lng > 137.8347)return true;if (lat < 0.8293 || lat > 55.8271)return true;return false;}private double transformLat(double x, double y){double ret = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y + 0.1 * x * y + 0.2 * Math.Sqrt(Math.Abs(x));ret += (20.0 * Math.Sin(6.0 * x * PI) + 20.0 * Math.Sin(2.0 * x * PI)) * 2.0 / 3.0;ret += (20.0 * Math.Sin(y * PI) + 40.0 * Math.Sin(y / 3.0 * PI)) * 2.0 / 3.0;ret += (160.0 * Math.Sin(y / 12.0 * PI) + 320 * Math.Sin(y * PI / 30.0)) * 2.0 / 3.0;return ret;}private double transformLng(double x, double y){double ret = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x * y + 0.1 * Math.Sqrt(Math.Abs(x)); ret += (20.0 * Math.Sin(6.0 * x * PI) + 20.0 * Math.Sin(2.0 * x * PI)) * 2.0 / 3.0;ret += (20.0 * Math.Sin(x * PI) + 40.0 * Math.Sin(x / 3.0 * PI)) * 2.0 / 3.0;ret += (150.0 * Math.Sin(x / 12.0 * PI) + 300.0 * Math.Sin(x / 30.0 * PI)) * 2.0 / 3.0;return ret;}}调⽤GPS t = new GPS();t.oLng = dt.Rows[i][1].ToString();t.oLat = dt.Rows[i][2].ToString();t.wgs_encrypt();t.gcj_encrypt();t.bd_encrypt();cells[i+1, 3].PutValue(t.bLng);cells[i+1, 4].PutValue(t.bLat);。
坐标系转换c语言作业

《程序设计语言(C)》大作业报告题目:坐标系的转换完成人:小组构成及分工:*******独自完成程序的书写及调试.问题定义: 大地坐标和空间直角坐标系以及其他坐标系之间转换在卫星大地测量中经常用到的坐标系有,空间直角坐标系和大地直角坐标。
为了实现测量数据的快速高效的在不同的坐标系的转换,方便在学习及应用的中。
需要编写一程序实现数据的转换,实现空间直角坐标系与大地直角坐标之间在同一个系统中转换。
开发工具:Visual C++ 6.0数据结构描述:用不同的变量表示不同的坐标,变量选择时根据使用的习惯方便使用者的识别。
X:表示大地直角坐标的纵坐标;Y:表示大地直角坐标的横坐标;Z表示大地直角坐标的竖坐标L:表示空间直角坐标的经度;B:表示空间直角坐标的纬度;H:表示空间直角坐标的高度;算法描述:通过编写一个主函数描述出整个程序的主体不分,然后通过调用函数实现坐标的转换。
程序调试情况:坐标由大地直角坐标系中的转换为空间直角坐标系的坐标:大地直角坐标转换后空间直角坐标:B=60; X=2055059.130122;L=50; Y=2449123.986892;H=100; Z=5500477.615329;坐标由空间直角坐标系中的坐标转换为大地直角坐标系中的坐标;空间直角坐标转换后大地直角坐标;X=100; B=-127.103127844;Y=100; L=45.000000000;Z=10000; H=-6391994.685276;参考文献或网站:1.《控制测量学》(下册)第三版孔祥元郭际明主编武汉大学出版社;2. 《数字测图原理与方法》第二版潘正风程效军成枢王腾军宋伟东邹进贵编著武汉大学出版社;3.《C 程序设计语言》魏东平朱连章于广斌编著;电子工业出版社心得体会:写这个大作业确实让我收获了许多!1.写这次计算机大作业,让我经历了一个难忘的过程。
自己的是必须得自己独立自主的想办法去解决,没人会为与自己没多大关系的事分很多神的!2.经历了过程,让我学到了些东西也在解决困难的过程中认识了些学长,他们也教会了我许多学习经验。
空间直角坐标系与大地坐标系转换程序
、空间直角坐标系与大地坐标系转换程序#include<iostream>#include<cmath>#include<iomanip>using namespace std;#define PI *asin)void main(){ double a,b,c,d1,d2,f1,f2,m1,m2,B,L,H,X,Y,Z,W,N,e;}.B=atan(t);W=sqrt(1-e*e*sin(B)*sin(B));N=a/W;H=Z/sin(B) - N*(1-e*e);int i;for(i=1;fabs(B-B0)>10E-10;i++)//每一次新的B与上一次计算的B比较,误差小于10E-10 rad{B0=B;%n=t;t=m+P*n/sqrt(k+n*n);//迭代B=atan(t);}W=sqrt(1-e*e*sin(B)*sin(B));N=a/W;//if((X<0)&(Y>0))//L=atan(Y/X)+PI;~//if((X<0)&(Y<0))// L=atan(Y/X)+PI;// if((X>0)&(Y<0))//L=2*PI-atan(Y/X);L=atan2(Y,X);H=sqrt(X*X+Y*Y)/cos(B)-N;int Bd,Bf,Ld,Lf;double Bm,Lm;@B=180*B/PI;//B转化为度做单位Bd=B;Bf=(B-Bd)*60;Bm=((B-Bd)*60-Bf)*60;L=180*L/PI;//L转化为度做单位Ld=L;Lf=(L-Ld)*60;Lm=((L-Ld)*60-Lf)*60;{cout<<"大地坐标系中纬度,经度,大地高(国际单位)分别为"<<Bd<<" "<<Bf<<" "<<fixed<<setprecision(6)<<Bm<<endl<<Ld<<" "<<Lf<<" "<<fixed<<setprecision(6)<<Lm<<endl<<fixed<<setprecision(6)<<H<<endl;break;}}}运行结果。
用C语言实现地图坐标投影的转换

南昌工程学院毕业设计(论文)水利与生态工程学院系(院)测绘工程专业毕业设计(论文)题目高斯-克吕格投影变换的程序实现学生姓名卢浩桢班级测绘工程学号2008101405指导教师张红梅完成日期2012年 6 月1日高斯-克吕格投影的程序实现The conversion of Gauss-Kruger projection in C language总计毕业设计(论文)25 页表格 2 个插图 6 幅论文是对用C语言实现地图投影转换的详细论述,前两章是对C语言和地图投影的相关知识进行简单介绍,并将研究地图投影转换的目的、意义和研究现状进行阐述,让我们对相关知识有了深刻认识与了解;后两章是具体实现的程序代码,程序运行实现的截图以及具体数据进行计算对程序进行验证,说明其可行性与正确性,得出最后的结论。
关键词:地图投影 C语言高斯-克吕格投影高斯正反算This dissertation is to research the Issue of Map projection conversion achieved with c language in detail. The first two chapters introduce us the C language and the knowledge of map projection briefly, and show the purpose, meaning and situation of study of map projection transformation one by one, which give us a deep understanding of this knowledge; the last two chapters describe the programming source code, and the pictures and specific cases and data in order to make sure its feasibility and correctness, finally , draw a conclusion.Keywords: Map projection; C language; Gauss-Kruger projection; Gauss formula for the positive and negative摘要 (I)ABSTRACT (Ⅱ)第一章引言 (1)1.1地图投影简介 (1)1.2研究地图投影转换的目的和意义 (1)1.3地图投影研究概括及趋势综述 (1)1.4研究思路和技术方法 (2)1.5 C语言概述 (3)第二章高斯-克吕格投影(高斯投影) (4)2.1高斯投影的基本概念 (4)2.2高斯投影坐标正反算公式 (7)第三章 c语言程序代码 (13)3.1地图投影变换的计算程序流程图 (13)3.2 C语言程序源代码 (16)3.3程序运行截图 (19)第四章算例 (22)结语 (22)参考文献 (25)致谢 (26)南昌工程学院本科毕业论文第一章引言1.1地图投影简介地图投影,Map Projection.,按照一定的数学法则,把参考椭球面上的点、线投影到可展面上的方法。
坐标转换与VC编程

目录第一章绪论 (1)第一节坐标系统概述 (1)第二节Visual C++ 概述 (2)第二章坐标转换原理 (5)第一节常用坐标系统 (5)第二节常用的坐标转换方法 (6)空间大地直角坐标系与大地坐标系之间的转换 (6)大地坐标与高斯平面坐标系之间的转换 (7)高斯投影正算公式 (8)高斯投影反算公式 (9)不同空间大地直角坐标系之间的转换 (10)不同平面直角坐标系之间的转换 (12)第三章坐标转换在VC中的实现 (13)第一节坐标类(CCoordinate) (13)语汇表 (17)致谢 (17)第一章绪论随着现代科技的发展,计算机的广泛应用,GPS卫星定位技术、地理信息系统(GIS)以及遥感技术(RS)的不断成熟与发展,我们的测事业也正发生着翻天覆地的变化。
从传统的人工野外测量到现代高科技自动化数字成图,测绘科学经历了一次又一次的变革,然而在不同时期的测绘成果却也不尽相同。
尤其在我国,由于历史的原因,我们曾更换过几次大地坐标系统,因此要利用前人的测绘成果,就得进行坐标转换,坐标转换的精度将直接影响我们对先前测绘成果的利用。
在GPS卫星定位技术广泛应用的今天,由于世界各国所使用的椭球参数不同,在不同地区进行GPS测量也将涉及到不同坐标系统的转换,因而坐标转换在现代测量中已为一个值得研究的问题。
第一节坐标系统概述众所周知,我们所居住的地球是一个不规则的椭球体,百余年来不少科学家为研究地球椭球而奋斗,他们根据各自收集到的资料,曾先后推算出不同的地球椭球参数值a和α。
但是由于当时人们所用资料的局限性,所推算得到的结果只能表征某个国家或某个大陆的大地水准面形状,都还不能完善地接近整个地球的形状和大小,还不是总地球椭球。
所以现如今绝大多数的国家还只能沿用这些古老的椭球,经过定位后作为各自的参考椭球。
我国旧中国使用的是海福特椭球,解放后使用克拉索夫斯基椭球,费除了南京大地原点,使用前苏联原点,即我们常说的1954年北京坐标系;1980年又建立了国家大地坐标系,采用IAG-75的椭球参数,原点位于西安(即我们常说的全国80坐标系)。
空间直角坐标系与空间大地坐标系的相互转换及其C++源程序
空间直角坐标系与空间大地坐标系的相互转换1•空间直角坐标系/笛卡尔坐标系坐标轴相互正交的坐标系被称作笛卡尔坐标系。
三维笛卡尔坐标系也被称为空间直角坐标系。
在空间直角坐标系下,点的坐标可以用该点所对应的矢径在三个坐标轴上的投影长度来表示,只有确定了原地、三个坐标轴的指向和尺度,就定义了一个在三维空间描述点的位置的空间直角坐标系。
以椭球体中心0为原点,起始子午面与赤道面交线为X轴,在赤道面上与X轴正交的方向为丫轴,椭球体的旋转轴为Z轴构成右手坐标系O.XYZ,在该坐标系中,P点的位置用X,Y,Z表示。
在测量应用中,常将地球空间直角坐标系的坐标原点选在地球质心(地心坐标系)或参考椭球中心(参心坐标系),z轴指向地球北极,x轴指向起始子午面与地球赤道的交点,y轴垂直于XOZ面并构成右手坐标系。
空间直角坐标系2•空间大地坐标系由于空间直角坐标无法明确反映出点与地球之间的空间关系,为了解决这一问题,在测量中引入了大地基准,并据此定义了大地坐标系。
大地基准指的是用于定义地球参考椭球的一系列参数,包括如下常量:2.1椭球的大小和形状2.2椭球的短半轴的指向:通常与地球的平自转轴平息。
2.3椭球中心的位置:根据需要确定。
若为地心椭球,贝U其中心位于地球质心。
2.4本初子午线:通过固定平极和经度原点的天文子午线,通常为格林尼治子午线。
以大地基准为基础建立的坐标系被称为大地坐标系。
由于大地基准又以参考椭球为基准,因此,大地坐标系又被称为椭球坐标系。
大地坐标系是参心坐标系,其坐标原点位于参考椭球中心,以参考椭球面为基准面,用大地经度L、纬度B和大地高H表示地面点位置。
过地面点P的子午面与起始子午面间的夹角叫P 点的大地经度。
由起始子午面起算,向东为正,叫东经(0°~180°),向西为负,叫西经(0°~-180°)。
过P点的椭球法线与赤道面的夹角叫P点的大地纬度。
由赤道面起算,向北为正,叫北纬(0°~90°),向南为负,叫南纬(0°~-90°)。
c++坐标系之间的变换

c++坐标系之间的变换坐标系是计算机图形学和几何处理中常用的概念,它用于描述和表示空间中的点位置。
在坐标系之间进行变换是计算机图形学和几何处理中的一项重要任务。
本篇文章将介绍C语言中实现坐标系之间变换的方法和技巧。
一、坐标系的基本概念1. 坐标系表示坐标系通常用坐标轴、原点和单位长度来表示。
在平面直角坐标系中,x轴和y轴将平面分成四个象限,原点表示坐标系的原点,单位长度通常表示为1个单位长度。
在三维空间直角坐标系中,x轴、y轴和z轴将空间分成八个部分,原点表示坐标系的原点,单位长度通常表示为1个单位长度。
2. 坐标系变换坐标系变换包括平移、旋转、缩放、反射等操作。
这些操作可以通过矩阵变换或四元数等方法来实现。
矩阵变换是将一个坐标系转换到另一个坐标系的过程,通常使用齐次坐标表示。
四元数是一种表示三维空间中点的方法,它包含了点的位置、速度和方向的信息。
二、C语言实现坐标系变换的方法1. 矩阵变换矩阵变换是实现坐标系变换的一种常用方法。
在C语言中,可以使用矩阵来表示变换矩阵,通过矩阵运算来实现坐标系的变换。
具体实现过程如下:(1)定义一个4x4的矩阵,用于表示变换矩阵;(2)根据需要,设置矩阵中的元素值;(3)使用矩阵乘法,将原点和目标点进行变换。
下面是一个简单的示例代码,实现了平移变换:```c#include <stdio.h>#define SCALE 1.0 // 缩放因子void translate(double matrix[4][4], double tx, double ty) {matrix[0][0] = SCALE; matrix[0][1] = 0.0; matrix[0][2] = 0.0; matrix[0][3] = tx;matrix[1][0] = 0.0; matrix[1][1] = SCALE; matrix[1][2] = 0.0; matrix[1][3] = ty;matrix[2][0] = 0.0; matrix[2][1] = 0.0; matrix[2][2]= 1.0; matrix[2][3] = 0.0;}int main() {double origin[3]; // 原点坐标double target[3]; // 目标点坐标double matrix[4][4]; // 变换矩阵origin[0] = 0.0; origin[1] = 0.0; origin[2] = 0.0; // 原点坐标设置target[0] = 5.0; target[1] = 5.0; target[2] = 5.0; // 目标点坐标设置translate(matrix, 2.0, 3.0); // 平移距离为2个单位长度,方向为x轴向右和y轴向上// 将原点和目标点进行变换,并输出结果printf("Origin: (%f, %f, %f)\n", origin[0], origin[1], origin[2]);printf("Target: (%f, %f, %f)\n", target[0], target[1], target[2]);return 0;}```该示例代码中,定义了一个4x4的矩阵`matrix`,用于表示平移变换矩阵。
大地坐标与空间直角坐标地转换程序代码
d=sign*t;
hd=hd-t*3600;
f=int(hd/60);
m=hd-f*60;
printf("%d'%d'%lf'\n",d,f,m);
}
void BLH_XYZ()
{
double B,L,H,N,W;
double d,f,m;
double X,Y,Z;
printf("请输入坐标(输入格式为角度(例如:30'40'50')):\n");
printf("2.空间直角坐标到坐标系的转换\n");
printf("3.贝塞尔问题正算\n");
printf("4.贝塞尔问题反算\n");
printf("5.高斯投影正算\n");
printf("6.高斯投影反算\n");
printf("0.退出程序\n");
scanf("%d",&m);
if(m==0)exit(0);
printf("\n\n转换后得到坐标为:\n\n");
c=a*a/b;
ep2=(a*a-b*b)/(b*b);
e2=(a*a-b*b)/(a*a);
break;
}
default:printf("\n\n输入错误!\n请重新输入!\n\n");goto sp2 ;
}
while(1)
{
switch;break;
case 2:XYZ_BLH();break;
#include "stdio.h"
WGS84大地坐标和UTM投影互转C语言代码

/* Precalculate epsilon */
epsilon = (315.0 * pow(n, 4.0) / 512.0);
/* Now calculate the sum of the series and return */
result = alpha * (phi + (beta * sin(2.0 * phi)) + (gamma * sin(4.0 * phi)) + (delta * sin(6.0 * phi)) + (epsilon * sin(8.0 * phi)));
*
* Outputs:
* xy - A 2-element array containing the x and y coordinates
* of the computed point.
*
* Returns:
* The function does not return a value.
alpha = ((sm_a + sm_b) / 2.0) * (1.0 + (pow(n, 2.0) / 4.0) + (pow(n, 4.0) / 64.0));
/* Precalculate beta */
beta = (-3.0 * n / 2.0) + (9.0 * pow(n, 3.0) / 16.0) + (-3.0 * pow(n, 5.0) / 32.0);
/* Precalculate alpha_ (Eq. 10.22) */
/* (Same as alpha in Eq. 10.17) */
alpha_ = ((sm_a + sm_b) / 2.0) * (1 + (pow(n, 2.0) / 4) + (pow(n, 4.0) / 64));
gcj2和wgs84坐标系之间的转换公式 c语言版
gcj2和wgs84坐标系之间的转换公式 c语言版以下是基于公式的C语言版的gcj2和wgs84坐标系之间的转换代码:```c#include <math.h>#define EARTH_RADIUS 6378137.0 // 地球半径,单位为米double transformLat(double x, double y){double lat = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y +0.1 * x * y + 0.2 * sqrt(fabs(x));lat += (20.0 * sin(6.0 * x * M_PI) + 20.0 * sin(2.0* x * M_PI)) * 2.0 / 3.0;lat += (20.0 * sin(y * M_PI) + 40.0 * sin(y / 3.0 * M_PI)) * 2.0 / 3.0;lat += (160.0 * sin(y / 12.0 * M_PI) + 320 * sin(y * M_PI / 30.0)) * 2.0 / 3.0;return lat;}double transformLon(double x, double y){double lon = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x* y + 0.1 * sqrt(fabs(x));lon += (20.0 * sin(6.0 * x * M_PI) + 20.0 * sin(2.0* x * M_PI)) * 2.0 / 3.0;lon += (20.0 * sin(x * M_PI) + 40.0 * sin(x / 3.0 * M_PI))* 2.0 / 3.0;lon += (150.0 * sin(x / 12.0 * M_PI) + 300.0 * sin(x / 30.0 * M_PI)) * 2.0 / 3.0;return lon;}double transformLatLon(double lat, double lon){if (lat < 0.01 || lon < 0.01)return 0.0;double dLat = transformLat(lon - 105.0, lat - 35.0); double dLon = transformLon(lon - 105.0, lat - 35.0);double radLat = lat / 180.0 * M_PI;double magic = sin(radLat);magic = 1.0 - 0.00669342162296594323 * magic * magic;double sqrtMagic = sqrt(magic);dLat = (dLat * 180.0) / ((EARTH_RADIUS * (1.0 -0.00669342162296594323)) / (magic * sqrtMagic) * M_PI);dLon = (dLon * 180.0) / (EARTH_RADIUS / sqrtMagic *cos(radLat) * M_PI);double newLat = lat + dLat;double newLon = lon + dLon;return newLat * 1000000.0 + newLon;}```其中,transformLat和transformLon函数用于将gcj坐标系下的经纬度转换为国际标准的经纬度,transformLatLon函数则是将gcj坐标系下的经纬度转换为wgs84坐标系下的经纬度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《程序设计语言(C)》大作业报告
题目:坐标系的转换
完成人:
小组构成及分工:
*******独自完成程序的书写及调试.
问题定义: 大地坐标和空间直角坐标系以及其他坐标系之间转换在卫星大地测量中经常用到的坐标系有,空间直角坐标系和大地直角坐标。
为了实现测量数据的快速高效的在不同的坐标系的转换,方便在学习及应用的中。
需要编写一程序实现数据的转换,实现空间直角坐标系与大地直角坐标之间在同一个系统中转换。
开发工具:Visual C++ 6.0
数据结构描述:
用不同的变量表示不同的坐标,变量选择时根据使用的习惯方便使用者的识别。
X:表示大地直角坐标的纵坐标;
Y:表示大地直角坐标的横坐标;
Z表示大地直角坐标的竖坐标
L:表示空间直角坐标的经度;
B:表示空间直角坐标的纬度;
H:表示空间直角坐标的高度;
算法描述:
通过编写一个主函数描述出整个程序的主体不分,然后通过调用函数实现坐标的转换。
程序调试情况:
坐标由大地直角坐标系中的转换为空间直角坐标系的坐标:
大地直角坐标转换后空间直角坐标:
B=60; X=2055059.130122;
L=50; Y=2449123.986892;
H=100; Z=5500477.615329;
坐标由空间直角坐标系中的坐标转换为大地直角坐标系中的坐标;
空间直角坐标转换后大地直角坐标;
X=100; B=-127.103127844;
Y=100; L=45.000000000;
Z=10000; H=-6391994.685276;
参考文献或网站:
1.《控制测量学》(下册)第三版孔祥元郭际明主编武汉大学出版社;
2. 《数字测图原理与方法》第二版潘正风程效军成枢王腾军宋伟东
邹进贵编著武汉大学出版社;
3.《C 程序设计语言》魏东平朱连章于广斌编著;电子工业出版社
心得体会:
写这个大作业确实让我收获了许多!
1.写这次计算机大作业,让我经历了一个难忘的过程。
自己的是必须得自己独立自主的想办法去解决,没人会为与自己没多大关系的事分很多神的!
2.经历了过程,让我学到了些东西也在解决困难的过程中认识了些学长,他们也教会了我许多学习经验。
3.在自己调试程序的过程中也知道了点以前写程序时不知道的细节问题,如:数据的类型在计算时会起到一定的限制,计算三角函数时数值向角度的转换.....;这就是知识!
4.这次写的作业题目是出自本专业的题,这次写计算机作业的所有收获都是以后学习的经验、财富.....!
5.在本次作业的调试中真的是考验了我的耐性。
因为一个函数中的数据类型的错误,导致调了近两天。
6.知识水平的有限,所以让我学会了怎样以更好的方式去向别人请教学问!。