西门子300PLC编程指南
S7-300 PLC课件- 03 STEP 7编程方法

存储器标志
存储器位 存储器字节 存储器字 存储器双字
I/Q 外部输入/输出
I/Q 字节, 外设 I/Q 字, 外设 I/Q 双字, 外设
定时器 计数器 数据块 数据块
定时器 (T) 计数器 (C)
数据块 (DB) 用OPN DB打开 位, 字节, 字, 双字 用OPN DI打开 位, 字节, 字, 双字
外部输入字 节 外部输入字 外部输入双 字 外部输出字 节 外部输出字
外部输出双字
PIB PIW PID PQB PQW PQD
0~65 535 0~65 534 0~65 532 0~65 535 0~65 534 0~65 532
定时器(T)
访问此区域可 以得到定时剩 余时间
0~255 T
定时器(T)
故障
FB
FB
Байду номын сангаас
SFC
OB FB FC SFB SFC
= 组织块 = 功能块 = 功能 = 系统功能块 = 系统功能
阴影:
FB 带背景数据块
SIEMENS
用户定义的块
块类型 组织块 (OB) 特性 - 操作系统和用户程序的接口 - 各层次的优先级 (1 ~ 26) - 局部数据堆栈中的特殊启动信息
功能块 (FB)
32.0 to 35.7
36.0 to 39.7
40.0 to 43.7
44.0 to 47.7
48.0 to 51.7
52.0 to 55.7
56.0 to 59.7
60.0 to 63.7
PS 机架 0 槽 1
CPU
IM
(发送)
0.0 to 3.7 4
4.0 to 7.7 5
s7-300PLC编程语句手册汇总

s7-300PLC编程语句手册汇总S7-300是一种可编程控制器,它有自己的编程语言和指令系统。
在使用S7-300进行编程时,需要了解其语言和指令系统的特点和用法。
S7-300的编程语言包括LAD(梯形图)、FBD(功能块图)和STL(结构化文本语言)。
其中,LAD是最常用的一种语言,它使用梯形图形式来表示程序的逻辑关系。
FBD则是一种图形化的编程语言,它使用不同的功能块来表示程序的逻辑关系。
STL则是一种类似于C语言的文本语言,它使用结构化的语法来表示程序的逻辑关系。
S7-300的指令系统包括基本指令和扩展指令。
基本指令包括逻辑指令、算术指令、移位指令等,用于实现程序的基本功能。
扩展指令则是在基本指令的基础上进行扩展,用于实现更加复杂的功能。
在使用S7-300进行编程时,需要根据具体的应用场景选择合适的编程语言和指令。
同时,还需要注意编程的规范和标准,以确保程序的可靠性和稳定性。
总之,S7-300的编程语言和指令系统是其核心功能之一,掌握其特点和用法对于进行编程工作非常重要。
在实际应用中,需要根据具体的需求和要求,选择合适的编程语言和指令,以实现程序的优化和效率提升。
STEP 7编程语言介绍STEP 7是一种用于编程可编程逻辑控制器(PLC)的工具。
它被广泛应用于自动化控制系统中,包括工厂自动化、机器人控制、物流自动化、建筑自动化等领域。
数据类型在STEP 7中,有多种数据类型可供使用,包括整型、浮点型、布尔型、字符型等。
这些数据类型可用于存储和处理不同类型的数据,以满足不同的应用需求。
参数数据类型在编写PLC程序时,需要指定参数的数据类型。
这些参数可以是输入、输出或内部数据。
参数的数据类型决定了它们可以存储的数据类型,以及它们可以执行的操作。
PLC用户存储区的分类及功能PLC用户存储区是用于存储程序和数据的区域。
它可以分为程序存储区和数据存储区。
程序存储区用于存储PLC程序,而数据存储区用于存储程序中使用的数据。
西门子 s7-300 s7-400编程语句表(stl)参考手册

美国(约翰森城) 技术支持和授权 当地时间:星 期一到星 期五 08:00:00 - 17:00 电话:+1 (0) 770 740 3505 传真:+1 (0) 770 740 3699 E-Mail:isd-callcenter@sea. GMT: -5:00
亚洲/ 澳大利亚(北京) 技术支持和授权 当 地 时 间:星期一到星期五 8:30 - 17:30 电话:+86 10 64 75 75 75 传真:+86 10 64 74 74 74 E-Mail: @ GMT: +8:00
SIMAT IC 热线和授权服务和技术支持 除了纸文件资料以外,我们在网上还提供有在线资料: /automation/service&support (英文网站) /service (中文网站) 在网上你可以找到: • • • • • 北 大 上 广 成 新闻列表可以向你提供不断更新的最新产品信息。 通过网上服务和技术支持部分的搜索功能,可以找到所需文件。 在论坛部分,全世界的用户和专家都可交流其经验。 通过我们在网上的代表处数据库, 你可以找到当地的自动化与驱动集团代表 处。 有关现场服务、修理、备件等更多信息,可参见“服务”。 京:(010) 6471 9990 连:(0411) 369 9760 - 40 海:(021) 5879 5255 州:(020) 8732 3967 都:(028) 6820 0939
vii
前言
viii
目录
前言…………………………………………………………………………………………………...iii 目录…………………………………………………………………………………………………..ix 1 位逻辑指令…………………………………………………………………………………….1-1 1.1 位逻辑指令概述 ...................................................................................... 1-1 1.2 A “ 与”................................................................................................. 1-3 1.3 AN “ 与非” ........................................................................................... 1-4 1.4 O “ 或”................................................................................................. 1-5 1.5 ON “ 或非”........................................................................................... 1-6 1.6 X “异或” ........................................................................................... 1-7 1.7 XN “ 异或非” ........................................................................................ 1-8 1.8 O 先“ 与” 后“ 或”................................................................................... 1-9 1.9 A( “ 与” 操作嵌套开始.......................................................................... 1-10 1.10 AN( “ 与非” 操作嵌套开始 .................................................................... 1-11 1.11 O( “ 或” 操作嵌套开始 ............................................................................ 1-11 1.12 ON( “ 或非” 操作嵌套开始.................................................................... 1-12 1.13 X( “异或”操作嵌套开始...................................................................... 1-12 1.14 XN( “ 异或非” 操作嵌套开始 ................................................................. 1-13 1.15 ) 嵌套闭合 .......................................................................................... 1-14 1.16 = 赋值 ............................................................................................... 1-15 1.17 R 复位 ............................................................................................... 1-16 1.18 S 置位 ................................................................................................. 1-17 1.19 NOT RLO 取反 ................................................................................. 1-18 1.20 SET RLO 置位(=1 ) ........................................................................ 1-18 1.21 CLR RLO 清零(=0 )....................................................................... 1-19 1.22 SAVE 把 RLO 存入 BR 寄存器........................................................... 1-20 1.23 FN 下降沿 .......................................................................................... 1-21 1.24 FP 上升沿 .......................................................................................... 1-23 比较指令……………………………………………………………………………………….2-1 2.1 比较指令概述..........................................................................................2-1 2.2 ? I 比较两个整数(16 位).....................................................................2-2 2.3 ? D 比较两个双整数(32 位) ...............................................................2-3 2.4 ? R 比较两个浮点数(32 位)................................................................2-4 转换指令………………………………………………………………………………………3-1 3.1 转换指令概述..........................................................................................3-1 3.2 BTI BCD 转成整数(16 位) .................................................................3-2 3.3 ITB 整数(16 位)转成 BCD.................................................................3-3 3.4 BTD BCD 转成整数(32 位)..............................................................3-4
西门子S7-300可编程控制器应用教程
Page: 5 返回本节
§1.2 PLC的定义和分类
PLC的定义
经历:可编程逻辑控制器(PLC)→可编程控制器(PC)
通用叫法:可编程序控制器(Programmable Controller, PC),是一台专为工业环境应用而设计制造的计算机。它 具有丰富的输入/输出接口,并且具有较强的驱动能力。 但由于PC容易和个人计算机(Personal Computer)混 淆,所以人们还沿用PLC作为可编程控制器的英文缩写。
Date: 2019/10/11
Page: 15 返回本节
§1.4 PLC的结构和工作过程
PLC的基本结构
编程器 计算机
其他设备 按钮
继电器触点
传感器
设备通讯接口
BUS
输 入 单 元
PLC
中央处理单元(CPU)
电源适配器
交流电源
系统程序存储器 RAM
I/O扩展接口
I/O扩展单元
接触器
输
出
电磁阀
Date: 2019/10/11
Page: 11 返回本节
PLC的功能
通信、联网功能
PROFIBUS DP
PROFIBUS PA (Ex)
PROFIBUS PA
Date: 2019/10/11
Page: 12 返回本节
PLC的功能
人机界面功能
Date: 2019/10/11
Page: 13 返回本节
输出刷新 输出刷新阶段
驱动
Date: 2019/10/11
Page: 18 返回本节
PLC的I/O系统
第(n-1)个扫描周期 输出刷新
第 n 个扫描周期
输入采样
西门子300系列PLC指令学习
所支持的PLC编程语言非常丰富。该软件的标准版支
持STL(语句表)、LAD(梯形图)及FBD(功能块
图)3种基本编程语言,并且在STEP 7中可以相互转
换。专业版附加对GRAPH(顺序功能图)、SCL
(结构化控制语言)、HiGraph(图形编程语言)、
CFC(连续功能图)等编程语言的支持。不同的编程
LAD(梯形图)是一种图形语言,比较形象直观,容 易掌握,用得最多,堪称用户第一编程语言。梯形图与继 电器控制电路图的表达方式极为相似,适合于熟悉继电器 控制电路的用户使用,特别适用于数字量逻辑控制。
返回本节
➢ FBD(功能块图)
FBD(功能块图)使用类似于布尔代数的图形逻辑符 号来表示控制逻辑,一些复杂的功能用指令框表示。FBD 比较适合于有数字电路基础的编程人员使用。
返回上级
4.日期和时间(DATE_AND_TIME)
用于存储年、月、日、时、分、秒、毫秒和星期,占用 8个字节,用BCD格式保存。星期天的代码为1,1~6的 代码为2~7。例如:
返回上级
5.用户定义的数据类型(UDT)
用户定义数据类型表示自定义的结构,存放在UDT块中 (UDT1~UDT65535),在另一个数据类型中作为一个 数据类型“模板”。当输入数据块时,如果需要输入几个 相同的结构,利用UDT可以节省输入时间。
返回本节
§4.3 S7-300指令基础
指令是程序的最小独立单位,用户程序是由若干条顺序 排列的指令构成。指令一般由操作码和操作数组成,其中 的操作码代表指令所要完成的具体操作(功能),操作数 则是该指令操作或运算的对象。
✓§4.3.1 PLC用户存储区的分类及功能 ✓§4.3.2 指令操作数 ✓§4.3.3 寻址方式 ✓§4.3.4 状态字
西门子300PLC程序创建+CPU设置

西门子300P L C程序创建+C P U设置(总24页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March本文档只是个人总结笔记,可能存在错误的地方,他人查看请慎重——潘一:程序的创建(2种方式)方式一第一步进入软件,在“File”中选择“New Project Wizard~(新项目向导)”会弹出对话框“STEP 7 Wizard:New Project”,在该对话框里用鼠标左键点击“Preview<<(事先查看)”,会在该对话框下面出来个如图1的状态。
图1第二步鼠标左击该图中“Next(下一步)”,进入选择CPU型号和CPU的MPI地址,一般MPI的地址都默认为2。
第三步在完成第二步后,用鼠标左击该对话框里的“Next”,来进行OB块的选择,这里OB1必须选择,其他的OB块要根据实际的需要再添加,也可以先不添加,等程序创建完后再添加。
第四步在第三步的该页面中有“Language For Selected Blocks(选择块语言)”,这里有3个项目,只能选择其中的一个(STL语句表,LAD梯形图,FBD 功能图),根据个人喜好的编程语言选择其中一项。
然后点击该页面中的“Next”。
第五步完成第四步后进入的是为新创建的程序命名,命完名后点击该页面的“Finish(完成)”即可。
方式二第一步进入软件,点击软件中图标,该图标是新建项目的意思。
会弹出“New Project(新建项目)”对话框。
第二步在对话框里有设置新程序的名字和保存的地址,完成后点击该对话框里的“OK”。
第三步完成第二步后进入程序界面,把鼠标放在新程序名字上,并用鼠标右键选择里面的“Insert New Project(插入新项目)”,在里面选择实际的PLC类型。
第四步然后进入硬件组态,发现硬件组态中是空的,需要自己编辑硬件组态。
先要插入机架,注释:配置机架的原则——1号槽为电源模块(在S7-300中,可以不配置电源模块)。
西门子S7-300PLC模拟量编程
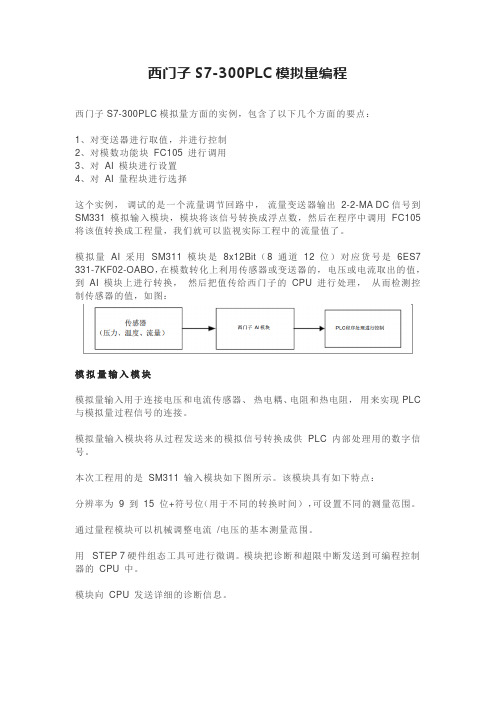
西门子S7-300PLC模拟量编程西门子S7-300PLC模拟量方面的实例,包含了以下几个方面的要点:1、对变送器进行取值,并进行控制2、对模数功能块FC105 进行调用3、对AI 模块进行设置4、对AI 量程块进行选择这个实例,调试的是一个流量调节回路中,流量变送器输出2-2-MA DC信号到SM331 模拟输入模块,模块将该信号转换成浮点数,然后在程序中调用FC105将该值转换成工程量,我们就可以监视实际工程中的流量值了。
模拟量AI 采用SM311 模块是8x12Bit(8 通道12 位)对应货号是6ES7 331-7KF02-OABO,在模数转化上利用传感器或变送器的,电压或电流取出的值,到AI 模块上进行转换,然后把值传给西门子的CPU 进行处理,从而检测控制传感器的值,如图:模拟量输入模块模拟量输入用于连接电压和电流传感器、热电耦、电阻和热电阻,用来实现PLC 与模拟量过程信号的连接。
模拟量输入模块将从过程发送来的模拟信号转换成供PLC 内部处理用的数字信号。
本次工程用的是SM311 输入模块如下图所示。
该模块具有如下特点:分辨率为9 到15 位+符号位(用于不同的转换时间),可设置不同的测量范围。
通过量程模块可以机械调整电流/电压的基本测量范围。
用STEP 7硬件组态工具可进行微调。
模块把诊断和超限中断发送到可编程控制器的CPU 中。
模块向CPU 发送详细的诊断信息。
模拟量输入模块的接线方式两线制电流和四线制电流都只有两根信号线,它们之间的主要区别在于:两线制电流的两根信号线既要给传感器或者变送器供电,又要提供电流信号;而四线制电流的两根信号线只提供电流信号。
因此,通常提供两线制电流信号的传感器或者变送器是无源的;而提供四线制电流信号的传感器或者变送器是有源的。
因此,当PLC 的模板输入通道设定为连接四线制传感器时,PLC 只从模板通道的端子上采集模拟信号,如图2-3,而当PLC 的模板输入通道设定为连接二线制传感器时,如图2-2,PLC 的模拟输入模板的通道上还要向外输出一个直流24V的电源,以驱动两线制传感器工作。
3_S7-300PLC的编程(西门子s7-300授课资料)

本文由yyiixxster贡献ppt文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
S7-300/400PLC的编程技术的编程技术刘美俊编程语言与数据类型1 编程语言STEP-7是S7-300/400系列PLC的编程软件. 梯形图,语句表(即指令表)和功能块图是标准的STEP-7软件包配备的3种基本编程语言,这3种语言可以在STEP-7中相互转换.1 顺序功能图顺序功能图(SFC)这是一种位于其他编程语言之上的图形语言,用来编制顺序控制程序,STEP-7中的S7 Graph顺序控制图形编程语言属于可选的软件包.在这种语言中,工艺过程被划分为若干个顺序出现的步,步中包含控制输出的动作,从一步到另一步的转换由转换条件控制.用Graph表达复杂的顺序控制过程非常清晰,用于编程及故障诊断更为有效, 使PLC程序的结构更加易读,它特别适合于生产制造过程. S7 Graph具有丰富的图形,窗口和缩放功能.系统化的结构和清晰的组织显示使S7 Graph对于顺序过程的控制更加有效.2 梯形图(LAD)梯形图是使用得最多的PLC图形编程语言.梯形图与继电器电路图很相似,具有直观易懂的优点, 特别适合于数字量逻辑控制.梯形图由触点,线圈和用方框表示的指令框组成.触点代表逻辑输入条件,例如外部的开关,按钮和内部条件等.线圈通常代表逻辑运算的结果,常用来控制外部的指示灯, 交流接触器和内部的标志位等.指令框用来表示定时器,计数器或者数学运算等附加指令. 使用编程软件可以直接生成和编辑梯形图,并将它下载到PLC.触点和线圈等组成的独立电路称为网络(Network),如下图所示,编程软件自动为网络编号.梯形图中的触点和线圈可以使用物理地址,例如I0.1, Q0.3等.如果在符号表中对某些地址定义了符号,例如令I0.1的符号为"起动",在程序中可用符号地址"起动"来代替物理地址I0.0,这样使程序易于阅读和理解. 用户可以在网络号右边加上网络的标题,在网络号的下面为网络加上注释.还可以选择在梯形图下面自动加上该网络中使用的符号的信息. 在分析梯形图中的逻辑关系时,为了借用继电器电路图的分析方法,可以想象在梯形图的左有两侧垂直"电源"之间有一个左正右负的直流电源电压,有一个假想的"能流"(PowerFlow)流过线圈.利用能流这一概念,可以很好地理解和分析梯形图,能流只能从左向右流动.3 语句表(STL)S7系列PLC将指令表称为语句表(Statement List),它是一种类似于微机的汇编语言中的文本语言,多条语句组成一个程序段.语句表比较适合经验丰富的程序员使用,可以实现某些不能用梯形图或功能块图表示的功能.4)功能块图(FBD) 功能块图(FBD)使用类似于布尔代数的图形逻辑符号来表示控制逻辑.一些复杂的功能用指令框来表示,功能块图用类似于与门,或门的方框来表示逻辑运算关系. 5)结构文本(ST) 结构文本(ST)是为IEC61131-3标准创建的一种专用的高级编程语言. STEP-7的S7 SCL(结构化控制语言)是符合lEC61131-3标准的高级文本语言.它的语言结构与编程语言Pascal和C相似,所以特别适合于习惯使用高级编程语言的人使用.6)S7 HiGraph编程语言图形编程语言S7 HiGraph属于可选软件包,它用状态图(State Graphs)来描述异步,非顺序控制过程的编程语言. 7)S7 CFC编程语言可选软件包CFC(Continuous Function Chart,连续功能图)用图形方式连接程序库中以块的形式提供的各种功能,包括从简单的逻辑操作到复杂的闭环和开环控制等领域.编程时将这些块复制到图中并用线连接起来即可.基本数据类型(1)基本数据类型;(2)用户通过组合基本数据类型生成的复合数据类型; (3)可用来定义传送FB(功能块)和FC(功能)参数的参数类型. 下面介绍STEP7的基本数据类型: 1)位(bit) 位数据的数据类型为BOOL(布尔)型,在编程软件中BOOL 变量的值1和0常用英语单词TURE(真)和FALSE(假)来表示. 位存储单元的地址由字节地址和位地址组成,例如I3.2中的区域标示符"I"表示输入(Input),字节地址为3,位地址为2,如图所示.这种存取方式称为"字节.位"寻址方式.输入字节IB3(B是Byte的缩写)由I3.0~I3.7这8位组成.位数据的表示2)字节(Byte) 8位二进制数组成1个字节(Byte,如下图,其中的第0位为最低位(LSB),第7位为最高位(MSB).3)字(Word) 相邻两个字节组成一个字,字用来表示无符号数.MWl00是由MB1OO和MB1O1组成的1个字,如图5.4.3,MB00为高位字节.MW100中的M为区域标示符,W表示字,100为字的起始字节MB1O0的地址.字的取值范围为W#16#0000~W#16#FFFF. 4) 双字(Double Word) 两个字组成1个双字,双字用来表示无符号数.MD100是由MB100~MB103组成的1个双字,(见上图),MB100为高位宇节, D表示双字,100为双字的起始字节MB100的地址.双字的取值范围为DW#16#0000_0000~DW#16#FFFF_FFFF.常数的表示方法常数值可以是字节,字或双字,CPU以二进制方式存储常数,常数也可以用十进制,十六进制,ASCII 码或浮点数形式来表示.B#16#,W#16#,DW#16#分别用来表示十六进制字节,字和双字常数.2#用来表示二进制常数,例如2#1101_1010. L#为32位双整数常数,例如L# +5. P#为地址指针常数,例如P#M2.O是M2.0的地址. S5T#是16位S5时间常数,格式为S5T# aD_bH_cM_dS_eMS.其中a,b,c,d,e分别是日, 小时,分,秒和毫秒的数值.输入时可以省掉下划线, 例如S5T#4S30MS=4s30ms,S5T#2H15M30S=2小时15分30秒. C#为计数器常数(BCD码),例如C#250.状态字状态字用于表示CPU执行指令时所具有的状态.某些指令可否执行或以何种方式执行可能取决于状态字中的某些位,指令执行时也可能改变状态字中的某些位,可以用位逻辑指令或字逻辑指令访问并检测状态字.状态字的结构如图所示.逻辑操作结果(RLO) 状态字的第1位称为逻辑操作结果(Result of Logic Operation, RLO).该位存储逻辑操作指令或比较指令的结果.在逻辑串中,RLO位的状态表示有关信号流的信息,RLO的状态为1, 表明有信号流(通),RLO的状态为0,表明无信号流(断).可用RLO触发跳转指令. 溢出位(OV) 状态字的第4位称为溢出位.当算术运算或浮点数比较指被置1,如果执行结果正常,该位被清0. 令执行时出现错误(溢出,非法操作,不规范格式)时,OV位条件码l(CCl)和条件码0(CC0) 状态字的第7位和第6位称为条件码1和条件码0.这两位结合起来用于表示在累加器1中产生的算术运算结果与0的大小关系,表1 算术运算后的CC1和CC0表2 比较,移位,字逻辑指令后的CCl和CC0寻址方式所谓寻址方式是指指令得到操作数的方式,可以直接或间接给出操作数的地址.STEP-7有4种寻址方式:立即寻址,存储器直接寻址,存储器间接寻址和寄存器间接寻址. 1 立即寻址立即寻址是对常数或常量的寻址万式,其特点是操作数直接包含在指令中,或者指令的操作数是惟一的.例如: SET AW W#16#117 // 将RLO置1 辑运算L 43 //将整数43装入累加器1中//将常数W#16#117与累加器1进行"与"逻2 存储器直接寻址存储器直接寻址的特点是直接给出操作数的存储单元地址.例如O I0.2 //对输入位I0.2进行"或"逻辑运算R Q4.0 = Ml.1 L Cl //将输出位Q4.0清"0" //使Ml.1的内容等于RLO的内容//将计数器Cl中的计数值装入累加器1 T MW6 //将累加器1中的内容传送给MW63 存储器间接寻址存储器间接寻址的特点是用指针进行寻址.操作数存储在由指针给出的存储单元中,根据要描述的地址复杂程度,地址指针可以是字或双字的,存储指针的存储器也应是字或双字的.对于T,C,FB,FC, DB,由于其地址范围为0~65535,可使用字指针; 对于I,Q,M等,可能要使用双字指针.使用双字指针时,必须保证指针中的位编号为"0".存储器间接寻址的指针格式如图所示.存储器间接寻址的指针格式例存储器间接寻址的指针格式及寻址L +6 T WM1 OPN T MD5 //将整数6装入累加器1//将累加器1的内容传送给存储器MWl //打开由MWl 指出的数据块,即打开数据块DB6//将累加器1的内容传送到存储器MD5A I[MDl] //对输入位I8.7进行逻辑"与"操作= Q[MD5] //将RLO赋值给输出位Q12.74 寄存器间接寻址寄存器间接寻址的特点是通过地址寄存器寻址.S7中有两个地址寄存器:ARl和AR2, 地址寄存器的内容加上偏移量形成地址指针,指向操作数所在的存储单元. 寄存器间接寻址有两种形式:区域内寄存器间接寻址和区域司寄存器间接寻址.寄存器间接寻址的指针格式如图所示.寄存器间接寻址的指针格式地址指针区域标识位的含义使用寄器指针格式访问一个字节,字或双字时,必须保证指针中位地址的编号为0.下面是区间间接寻址的例子: L P#5.0 LAR1 //将间接寻址的指针装入累加器1 //将累加器1中的内容送到地址寄存器1A M[AR1,P#2.3] //AR1中的P#5.0加偏移量P#2.3,实际上是对M7.3进行操作= Q[AR1,P#0.2] //逻辑运算结果送Q5.2 L DBW[AR1,P#18.0] //将DBW23装入累加器1 下面是区域间间接寻址的例子: L P#M6.0 LAR1 //将存储器位M6.0的双字指针装入累加器1 //将累加器1中的内容送到地址寄存器1 T W[AR1,P#50.0] //将累加器1的内容传送到存储器字MW56基本指令及其编程1,位逻辑指令位逻辑指令状态寄存器触点在S7-300/400PLC中,CPU中有一个专门用于存储指令执行状态的16位状态寄存器,状态寄存器以二进制位的形式保存指令的执行结果与中间状态等,在梯形图编程时,这些标志可以用触点的形式在梯形图中使用与编程,S7300/400PLC可以使用的状态寄存器触点如下表所示.状态寄存器触点1,"与"(A),"与非"(AN)A:"与"指令适用于单个常开触点串联,完成逻辑"与"运算. AN:"与非"指令适用于单个常闭触点串联,完成逻辑"与非" 运算."与"(A),"与非"(AN)指令由图可知,触点串联指令也用于串联逻辑行的开始.CPU 对逻辑行开始第1条语句如I1.0的扫描称为首次扫描.首次扫描的结果(I1.0的状态)被直接保存在RLO(逻辑操作结果位)中; 在下一条语句,扫描触点Q5.3的状态,并将这次扫描的结果和RLO中保存的上一次结果相"与"产生的结果,再存入RLO中,如此依次进行.在逻辑串结束处的RLO可作进一步处理. 如赋值给Q4.2(=Q4.2).2 ,"或"(O),"或非"(ON) )," ), 或非" )O:"或"指令适用于单个常开触点并联,完成逻辑"或"的运算. ON:"或非"指令适用于单个常闭触点并联,完成逻辑"或非"运算."或"(O),"或非"(ON)指令由图可知,触点并联指令也用于一个并联逻辑行的开始.CPU对逻辑行开始第1条语句如I4.0的扫描称为首次扫描.首次扫描的结果(I4.0的状态)被直接保存在RLO(逻辑操作结果位)中,并和下一条语句的扫描结果相"或",产生新的结果再存入RLO中,如此一次进行.在逻辑串结束处的RLO 可用作进一步处理,如赋值给Q8.0(=Q8.0). 此外,还有"异或"(X),"异或非" (XN),嵌套指令等等.3,输出线圈,输出线圈指令即逻辑串输出指令,又称赋值指令,该指令把RLO中的置赋给指定的位地址,当RLO变化时,相应位地址信号状态也变化,在LAD中,只能将输出指令放在触点电路的最右端,不能将输出指令单独放在一个空网络中.下图是两个应用举例.4,中间输出如图所示,中间输出指令被安置在逻辑串中间,用于将其前面的位逻辑操作结果(即本位置的RLO值)保存到指定地址,所以有时也称为"连接器"或"中间赋值元件".它和其他元件串联时, "连接器"指令和触点一样插入.连接器不能直接连接母线,也不能放在逻辑串的结尾或分支结尾处.5 置位指令,复位指令置位指令,置位/复位指令也是一种输出指令.使用置位指令时,如果RLO =1,则指定的地址被置为1,而且一直保持,直到被复位为0.使用复位指令时,如果RLO=1,则指定的地址被复位为0,而且一直保持,直到被置位为1,如图所示.6 触发器指令触发器有置位复位触发器(SR触发器)和复位置位触发器(RS 触发器)两种,这两种触发器指令均可实现对指定位地址的置位或复位.触发器可以用在逻辑串最右端,结束一个逻辑串;也可用在逻辑串中,当作一个特殊触点,影响右边的逻辑操作结果.置位优先型RS触发器如下图所示.7 边沿检测指令当信号状态变化时就产生跳变沿:从0变到1时,产生一个上升沿(也称正跳沿);从1变到0时,产生一个下降沿(也称负跳变). 跳变沿检测的方法是:在每个扫描周期(OB1循环扫描一周),把当前信号状态和它在前一个扫描周期的状态相比较,若不同,则表明有一个跳变沿.因此,前一个周期里的信号状态必须被存储,以便能和新的信号状态相比较. S7-300/400PLC有两种边沿检测指令:一种是对逻辑串操作结果RLO的跳变沿检测的指令;另一种是对单个触点跳变沿检测的指令. (1) RLO跳变沿检测指令RLO跳变沿检测可分别检测正跳沿和负跳沿.①当RLO从0到1时,正跳沿检测指令在当前扫描周期以RLO=0表示其变化,而在其他扫描周期均为0.在执行RLO正跳沿检测指令前,RLO的状态存储在位地址中. ②当RLO从1到0时,负跳沿检测指令在当前扫描周期以RLO=1表示其变化,而在其他扫描周期均为0.在执行RLO 负跳沿检测指令前,RLO的状态存储在位地址中. RLO跳变沿检测指令和操作数见下表.RLO跳变沿检测指令和操作数(2) 触点跳变沿检测指令触点跳变沿检测可分别检测正跳沿和负跳沿. ①触点正跳沿检测指令FP:在LAD中以功能框表示,它有两个输入端,一个直接连接要检测的触点,另一个输入端M_BIT所接的位存储器上存储上一个扫描周期触点的状态.有一个输出端Q,当触点状态从0到1时,输出端Q接通一个扫描周期.②触点负跳沿检测指令FN:在LAD中以功能框表示,它有两个输入端,一个直接连接要检测的触点,另一个输入端M_BIT所接的位存储器上存储上一个扫描周期触点的状态.有一个输出端Q,当触点状态从1到0时,输出端Q接通一个扫描周期.触点跳变沿检测指令和操作数LAD(a)程序行要检测的是逻辑串I1.0,I1.1的运算结果的跳变边沿,即图中①点处的RLO的边沿变化情况,同时用M1.0来存储RLO①的状态.程序的工作过程如时序图:当程序运行到图中a点时,当前RLO值是1,而上次RLO值(存放在M1.0中)是0, 于是FP指令判断到一个RLO的正跳沿,就将②点处的M1.0置1, 并且输出给M8.0;当程序经过1个扫描周期,运行到波形图中b点时,当前RLO值和前一个RLO 值均为1,相同(RLO在相邻两个扫描周期中相同,可全为1或0),那么FP指令将②点处M1.0置0, 并输出给M8.0.这样M8.0为1的时间仅一个周期.图中虚线箭头指的是两个相邻扫描周期RLO的比较. 对RLO下降沿的检测,读者可自行分析c点,d点时的情况,FN 指令检测到一个RLO①的负跳沿时将M8.1置1,M8.1为1的时间也是一个周期.位逻辑指令的应用举例机床的工作台运动示意图工作台由交流电动机驱动,改变电动机的旋转方向就可以改变工作台的运动方向.按下启动按钮SBl后,电动机驱动工作台运动,如果工作台运动到极限位置时,由行程开关SQl或SQ2检测并发出停止前进指令,同时自动发出返回指令.只要不按停止按钮SB2,工作台将继续这种自动往复运动.工作台驱动电动机通过热继电器做过载保护.I/O地址分配表系统梯形图程序二,定时器指令S7-300/400PLC提供了多种型式的定时器,定时器的语句表指令如表1所示,梯形图指令与操作数如表2所示.不同类型定时器的编号是统一的,如CPU314为T0~T127(共128个),究竟它属于哪种定时器类型由对它所用的指令决定. 定时器的语句表指令定时器的梯形图指令与操作数1,脉冲定时器(SP)这是一种产生一个"长度脉冲",即接通一定时间的定时器,图中当I0.0闭合(RLO有正跳沿),SP定时器T4启动并运行,T4触点立即动作,T4常开触点闭合,只要I0.0保持闭合,T4继续运行,T4常开触点保持闭合.当定时时间到(图中为3s), T4常开触点断开.所以只要I0.0维持足够长的时间(超过设定时间)及无复位信号(I0.1未接通) 两个条件成立,定时器就能接通一固定时间(所设定时间).2,延时脉冲定时器(SE) ,延时脉冲定时器( )图中当I0.0闭合(RLO有正跳沿),SE定时器T4启动运行,T4触点立即动作,其常开触点闭合,此时即使I0.0断开,T4仍将继续运行,T4 常开触点也一直保持闭合直至所设定的时间.只要I0.0不在设定时间内反复短时通断,T4均可设定长时间的接通.如果出现I0.0短时反复通断, 导致T4的反复响应,会使总接通时间大于设定时间(图中t>3s处).I0.1闭合,启动复位信号, 定时器T4立即复位(停止运行).启动延时接通定时器(SD)控制中,有些控制动作要比输入信号滞后一段时间开始,但和输入信号一起停止,为了满足这样的要求, 可采用启动延时接通定时器,其工作过程如下图所示. 图中,当I0.0闭合(RLO有正跳沿),SD定时器T4 启动运行,当设定的延时时间3s到后,T4触点动作, T4的常开触点闭合,直至I0.0断开,T4运行随之停止, T4常开触点断开.I0.0闭合时间小于定时器T4设定延时时间,T4触点不会动作.I0.1闭合,启动复位信号, 定时器T4立即复位(停止运行).4 启动保持型延时接通定时器(SS)如果希望输入信号接通后(接通短时即断开,或持续接通), 在设定延迟时间后才有输出,就需要用启动保持型延时接通定时器.其工作过程如下图. 图中当I0.0闭合一下或闭合较长时间(RLO有正跳沿),SS 定时器T4启动运行,当设定的延时时间3s到后,T4线圈得电, T4常开触点就闭合,此后一直闭合,直至I0.1闭合,复位指令使T4复位.只有复位指令才能令动作了的SS定时器复位,因此使用SS定时器必须编写复位指令(R),其他定时方式可根据需要而定. 在设定延时时间内,如果I0.0反复通断,会影响定时器触点延迟接通时间.5, 启动延时断开定时器(SF)图中I0.0闭合,SF定时器T4启动,其触点立即动作, 常开触点T4立即闭合.当I0.0断开(RLO有负跳沿)时开始计时,在定时的延时时间未到之前,其触点不会动作,常开触点T4不会断开.当延时时间到,常开触点T4 才会断开.在延时时间内I0.1闭合,复位信号可令T4立即复位,常开触点立即断开.不在定时延时时间内,复位(R)信号对SF定时器不起作用. 在I0.0断开的时刻,如果存在复位信号,则SF定时器立即复位.计数器指令在生产过程中常常要对现场事物发生的次数进行记录并据此发出控制命令,计数器就是为了完成这一功能而开发的用线圈表示的计数器指令用功能块表示的计数器指令及操作数减计数器的使用当输入I0.1从0跳变为1时,CPU将装入累加器1中的计数初值(此处为BCD数值127)置入指定的计数器C20 中.计数器一般是正跳沿计数.当输入I0.3由0跳变到1, 每一个正跳沿使计数器C20的计数值减1(减计数),若I0.3没有正跳沿,计数器C20的计数值保持不变.当I0.3 正跳变127次,计数器C20中的计数值减为0.计数值为0 后,I0.3再有正跳沿,计数值0也不会再变.计数器C20 的计数值若不等于0,则C20输出状态为1,Q4.0也为1; 当计数值等于0时,C20输出状态亦为0,Q4.0为0.输入I0.4若为1,计数器立即被复位,计数值复位为0,C20输出状态为0.可逆计数器的使用..I0.2CUI0.3 I0.1CDS C#5 I0.4 5 当前计数值MW10 MW12 4 3 2 1 0 PV R Q4.0. .图中当S(置位)输入端的I0.1从0跳变到1时,计数器就设定为PV端输入的值,PV输入端可用BCD码指定设定值,也可用存储BCD数的单元指定设定值,本图中指定BCD数为5.当CU (加计数)输入端I0.2从0变到1时,计数器的当前值加1(最大999).当CD(减计数)输入端I0.3从0变到1时,计数器的当前值减1(最小为0).如果两个计数输入端都有正跳沿,则加, 减操作都执行,计数保持不变.当计数值大于0时输出Q上的信号状态为1;当计数值等于0时,Q上的信号为0,图中Q4.0也相应为1或0.输出端CV和CV_BCD分别输出计数器当前的二进制计数值和BCD计数值,图中MW10存当前二进制计数值,MW12 存当前BCD计数值.当R(复位)输入端的I0.4为1,计数器的值置为0,计数器不能计数,也不能置位.下面介绍常用的功能指令的使用方法.1 装载与传送指令数据装载与传送指令用于在各个存储区之间交换数据及存储区与过程输入/输出模板之间交换数据.CPU在每次扫描中无条件执行数据装载与传送指令,而不受RLO的影响. L T T T L (1)对累加器1的装载和传输指令+8 //将立即数装载人累加器1中//将累加器1的内容传输给输出QBl0 //将累加器1的内容传输给存储字MWl4 //将累加器1的内容传输给数据双字DBD2IB[DID8] //将数据双字DID8所指的输入字节装载入累加器1中QBl0 MWl4 DBD2(2)读取或传输状态宇L T STW STW //将状态字中的内容装入累加器1 中//将累加器1中的内容传输到状态字中(3)装载时间值或计数值LC L Tl Cl //将定时器Tl中的时间值以BCD码格式装入累加器1中//将计数器Cl中的二进制格式的计数值装入累加器的低字中传输指令的应用传输指令EN端为允许输入端;ENO端为允许输出端.当输入I0.0 为"1"时,传输指令将MWl0中的字传输给MW20.如果指令正确执行,则输出Q4.0为"1".否则,如果输入I0.0为"0",则数据不传输.如果希望MWl0无条件传输给MW20,则EN端直接连接至母线即可.整数比较指令的使用输入信号I0.0的RLO为"1"时,比较整数MW0的值是否大于等于MW2的值,如果是,则输出Q4.0为"1".1。
S7-300编程手册

一、S7-300硬件说明S7-300主要支持的硬件有:(1)电源(PS)电源模块提供了机架和CPU内部的供电电源,置于1号机架的位置。
(2)中央处理器(CPU)CPU存储并处理用户程序,为模块分配参数,通过嵌入的MPI总线处理编程设备和PC、模块、其它站点之间的通讯,并可以为进行DP主站或从站操作装配一个集成的DP接口。
置于2号机架。
(3)接口模块(IM)接口模块将各个机架连接在一起。
不同型号的接口模块可支持机架扩展或PROFIBUS DP连接。
置于3号机架,没有接口模块时,机架位置为空。
(4)信号模块(SM)通常称为I/O(输入/输出)模块。
测量输入信号并控制输出设备。
信号模块可用于数字信号和模拟信号,还可用于进行连接,如传感器和启动器的连接。
(5)功能模块(FM)用于进行复杂的、重要的但独立于CPU的过程,如:计算、位置控制和闭环控制。
(6)通讯处理器(CP)模块化的通讯处理器通过连接各个SIMATIC站点,如:工业以太网,PROFIBUS或串行的点对点连接等。
后三个模块在机架上可以任意放置,系统可以自动分配模块的地址。
需要说明的是,每个机架最多只能安装8个信号模块、功能模块或通讯模块。
如果系统任务超过了8个,则可以扩展机架(每个带CPU的中央机架可以扩展3个机架)。
各个模块的性能具体如下:(1)电源模块(PS)电源模块用于将SIMATIC S7-300 连接到120/230V AC电源。
(2)接口模块接口模块用于多机架配置时连接主机架(CR)和扩展机架 (ER)。
S7-300通过分布式的主机架(CR)和3个扩展机架(ER),可以操作多达32个模块。
运行时无需风扇。
(3)CPU模块各种CPU 有各种不同的性能,例如,有的CPU 上集成有输入/输出点,有的CPU上集成有PROFI- BUS-DP通讯接口等。
以上只是列出了部分指标,设计时还要参看相应的手册。
(4)信号模块信号模块用于数字量和模拟量输入/输出,又分DI/DO(数字量输入/输出)和AI/AO(模拟量输入/输出)模块。
西门子S7-300 PLC编程及应用教程PPT

1.3 位逻辑指令
二、输出指令(= 、(#)) 输出线圈:
输出线圈(又称赋值指令),将计算出来的逻辑结果写到输出 线圈指定的地址区域。
示例:
1.3 位逻辑指令
二、输出指令(= 、(#)) 中间输出:
中间输出指令是存储逻辑流的中间赋值单元,它可以记录梯形 图中某点的逻辑状态而不影响整个逻辑流的逻辑关系,其符号为线 圈输出的包括里加一“#”字符,即为(#)。
1.1 PLC简介
五、300 PLC的硬件模块 314C型CPU:
3、MCC卡
1.1 PLC简介
五、300 PLC的硬件模块 接口模块:
接口模块用于多机架配置时连接主机架(CR)和扩展机架(ER)。使用 IM360/361接口模块可以扩展3个机架,主机架使用IM360,扩展机架使用IM361, 各相邻机架之间的电缆最长为10m。
1.3 位逻辑指令
四、异或和同或指令(X、XN) 异或:
异或指令是指两个指令位逻辑状态相异时逻辑结果为 “1”, 否则为“0”,异或指令用助记符X表示。
示例:
1.3 位逻辑指令
四、异或和同或指令(X、XN) 同或:
同或指令是指两个指令位逻辑状态相同时逻辑结果为“1”, 否则为“0”,同或指令用助记符XN表示。
示例:
1.3 位逻辑指令
五、取反指令(NOT) 讲解:
能流取反指令是将取反指令前的逻辑串运算结果RLO进行取反, 并将取反后的值保存在逻辑位RLO,能流取反触点中间标有“NOT”。
示例:
1.3 位逻辑指令
六、置复位和触发器指令(S、R、SR、RS) 置复位:
置位指令(S、Set)是当逻辑运算结果RLO为“1”时,将指 定的位地址置位(置为1状态并保持),当逻辑运算结果RLO为 “0”时,该指令对指定的地址状态没有影响。
第6章S7-300PLC指令系统及编程(1).
二、字逻辑指令
(一)字逻辑STL指令 字逻辑STL指令是可带操作 数(常数)或不带操作数 的指令。对于STL形式的字 逻辑运算指令,字逻辑运 算是将二个16位的字或32 位双字逐位进行逻辑运算 的指令。
又如图6-13所示中的LAD(2)中,SAVE指令将当前RLO状态 (上一程序块的最后一个RLO,而不是I1.5的状态)存入BR位中, 下面用检测BR位(此处为Q4.0的状态)来重新检查保存的RLO。
执行图6-13中的STL(3)程序,SET的指令使RLO为1,赋值 M10.0~M10.2为1;CLR指令使RLO为0,赋值M11.5、Q4.2为0.
2、对单个触点跳变沿检测指令 单个触点跳变沿检测指令用于检测单个触点跳变沿,它使用梯形
图方块指令,该方块指令同触发器一样可看做是一个特殊的常开触 点。其指令格式及功能如表6-9所示。
表6-9
说明:①〈位地址1〉为被检测触点,该地址存储被检测触点的状态,可供CPU 检测该地址的当前状态。 ②〈位地址2〉与〈位地址1〉状态一样,该地址也存储被检测触点的状态,可供 CPU检测〈位地址1〉上一个扫描周期的状态,以便与〈位地址1〉当前状态相比 较,来判断被检测触点是正跳沿还是负跳沿。 ③在有正负跳沿时,Q输出一个正脉冲,脉宽为一个OB1扫描周期(即Q只能在 一个扫描周期内保持为1,故Q又称为单稳输出)。 ④该方块指令同触发器方块指令一样,可看做是一个特殊的常开触点,当Q=1, 触点闭合(仅闭合一个扫描周期),若Q=0,则触点断开。
S7-300PLC编程技术及基本指令

值范围为DW#16#0000_0000~DW#16#FFFF_FFFF。
S7-300PLC编程技术及基本指令
S7-300PLC编程技术及基本指令
•逻辑操作结果(RLO) 状态字的第1位称为逻辑操作结果(Result of Logic Operation, RLO)。该位存储逻辑操作指令或比较指令的结果。在逻辑串 中,RLO位的状态表示有关信号流的信息,RLO的状态为1, 表明有信号流 (通),RLO的状态为0,表明无信号流(断)。可
•常数的表示方法 • 常数值可以是字节、字或双字,CPU以二进制方式存储常数, 常数也可以用十进制、十六进制、ASCII码或浮点数形式来表示。
S7-300PLC编程技术及基本指令
• B#16#,W#16#,DW#16#分别用来பைடு நூலகம்示十六进制 字节、字和双字常数。2#用来表示二进制常数,例如 2#1101_1010。 L#为32位双整数常数,例如L# +5。
使用编程软件可以直接生成和编辑梯形图,并将 它下载到PLC。 S7-300PLC编程技术及基本指令
触点和线圈等组成的独立电路称为网络(Network),如下图所 示,编程软件自动为网络编号。
S7-300PLC编程技术及基本指令
梯形图中的触点和线圈可以使用物理地址,例如I0.1, Q0.3等。如果在符号表中对某些地址定义了符号,例如令I0.1的
S7-300/400PLC编程技术及基本指令
S7-300PLC编程技术及基本指令
编程语言与数据类型
西门子 SIMATIC S7-300 可编程控制器 说明书

模块
总线连接器
DIN导轨
DIN导轨
PS CPU (选件) (选件) S7-300 结构
IM SM SM SM SM SM SM
Siemens ST 70.2C·2003
3
综述
SIMATICห้องสมุดไป่ตู้S7-300
结构 简单的结构使得 S7-300 灵活 而易于维护 • DIN 标准导轨安装 只需简单地将模块钩在 DIN标准的安装导轨上, 转动到位,然后用螺栓锁 紧。 • 集成的背板总线 背板总线集成在模块上, 模块通过总线连接器相 连,总线连接器插在机壳 的背后。 • 更换模块简单并且不会 弄错 更换模块时,只需松开 安装螺钉。很简单地拔 下已经接线的前连接 器。在连接器上的编码 防止将已接线的连接器 插到其他的模块上。 可靠的接线端子 对于信号模块可以使用 螺钉型接线端子或弹簧 型接线端子 • TOP 连接 采用一个带螺钉或夹紧连 接的 1 至 3 线系统进行预 接线。或者直接在信号模 块上进行接线。 确定的安装深度 所有的端子和连接器都在 模块上的凹槽内,并有端 盖保护,因此所有的模块 都有相同的安装深度。 没有槽位的限制 信号模块和通讯处理模块 可以不受限制地插到任何 一个槽上, 系统自行组态。
扩展机架(CR)
max.10m 368连接电缆 主机架(CR)
CPU 24V DC
IM 365
扩展能力(水平排列,CPU 314 以上)
4
Siemens ST 70.2C·2003
综述
SIMATIC S7-300
结构(续) 如果用户的自控系统任务需 要多于 8 个信号模块或通讯 处理器模块时,则可以扩展 S7-300 机架(CPU314 以上) • 在 4 个机架上最多可安装 32 个模块 最多3个扩展机架(ER) 可 以接到中央机架(CR) 上 每个机架 (CR/ER) 可以插 入8个模块 • 通过接口模块连接 每个机架上 (CR/ER) 都有 它自己的接口模块。它总 是插在CPU旁边的槽内, 负责与其他扩展机架自 动地进行通讯。 - 通过 IM365 扩展 可扩展 1 个机架, 最长 1 米,电源也是由此扩 展提供。 - 通过 IM360/361 扩展 可扩展 3 个机架, 中央 机 架 (CR) 到 扩 展 机 架 (ER) 及 扩 展 机 架 之 间 的距离最大为 10 米。 • 独立安装 每个机架可以距离其他 机架很远进行安装,两 个机架间(主机架与扩展 机架,扩展机架与扩展 机 架 ) 的 距 离 最 长 为 10 米。 灵活布置 机 架 (CR/ER) 可 以 根 据 最佳布局需要,水平或 垂直安装。
西门子plc_s7-300编程规则

一、程序结构1、程序结构统一OB1:主程序;OB100:初始化程序(无需主程序调用);OB35:100ms(可修改)中断(无需主程序调用),可以调用PID模块;OB80、OB82、OB85、OB86、OB87、OB121、OB122:故障诊断模块(无需主程序调用、无需编程);FC1:系统模式;FC2:输入处理;FC3:输出处理;FC4:运行处理;FC5:停止处理;FC6:手自动切换;FC7:。
FC100:之后用来建立一些可以循环调用的子程序;FC105:系统自带,模拟量输入子程序(可以循环调用);FC106:系统自带,模拟量输出子程序(可以循环调用);modbus通讯(CP341):FB7:P_RCV_RK,FB8:P_SND_RK;通讯CP340:FB2:P_RCV,FB3:P_SND;一般PID:用FB41;温、湿度PID:用FB58;如果程序块与系统块重复,请避让。
2、数据块DB1:AI数据,类型:REAL,与上位机接口;DB2:AO数据,类型:REAL,与上位机接口;DB3:DI数据,类型:BOOL,与上位机接口;DB4:DO数据,类型:BOOL,与上位机接口;DB5:设备运行时间及流量累计,类型:REAL,与上位机接口;DB6:报警消息,类型:BOOL,与上位机接口;DB7:类型:REAL,中间寄存器;DB8:类型:INT,中间寄存器;DB9:类型:WORD,中间寄存器;DB10:类型:BOOL,中间寄存器;DB11:之后用作与设备通讯用,例如:MODBUS通讯等;DB100:之后用作调用FB块时的背景数据块;M区:也作为中间变量。
3、DP从站故障诊断DP从站必须做故障诊断,故障报警,用FB125即可。
二、控制模式1、系统设置远程/本地/手动按钮、远程:只能通过上位机对系统进行自动启/停控制,单台设备就地控制优先,在程控时,可以通过上位机对设备进行软手操/自动切换,软手操启/停;、本地:只能通过触摸屏对系统进行自动启/停控制,单台设备就地控制优先,在程控时,可以通过触摸屏对设备进行软手操/自动切换,软手操启/停;、手动:手动控制时,上位机/触摸屏失效,只能通过手动控制设备的启/停。
西门子S7-300的编程
紧凑型设计
40mm
无风扇
S7-300 通讯处理器(CP)-CP342-5
PROFIBUS 通讯处理器
DP主站
DP从站 S7通讯, 最多16个连接 S5兼容通讯(Send/Receive), 最 多16个连接 PG/OP通讯, 最多16个
124个DP从站 每从站数据量
DP从站功能 智能从站 数据量 240byt e输入 240byt e输出
有8点输入,16点输入,32点输入。 可以是DC 24V,也有AC120V/230V SM 322 数字量输出模块
有8点、16点、32点输出。输出负载 可以是DC 24V,也有AC120V/230V
SM 323 数字量输入/ 输出模块
具体选型参考手册
有8点输入、8点输出型 有16点输入、16点输出型
同步应用
驱动装置类型 异步电机 步进电机 伺服电机
位置控制
功能
开环 高/低速定位 定位控制 高/低速定位 步进电机控制
产品
CPU 314C, C7-635 Easy motion control FM 351, 451 EM253
解决方案
内置功能 功能块 功能模板 功能模板 运动控制 T-CPU
最高20kHz 计数范围 32位无符号 31位有符号 可连接的传感器 RS422增量编码器 24V增量编码器 工作方式 连续计数,单向计数, 循环计数 频率测量, 速度测量, 周期测量 过程中断 达到基准值 超限
位置控制
选型条件 位置控制模式 高/低速运动控制 定位 运动轨迹控制
计数及测量-FM350-1
S7-300编程手册

S7-300编程⼿册⼀、S7-300硬件说明S7-300主要⽀持的硬件有:(1)电源(PS)电源模块提供了机架和CPU内部的供电电源,置于1号机架的位置。
(2)中央处理器(CPU)CPU存储并处理⽤户程序,为模块分配参数,通过嵌⼊的MPI总线处理编程设备和PC、模块、其它站点之间的通讯,并可以为进⾏DP主站或从站操作装配⼀个集成的DP接⼝。
置于2号机架。
(3)接⼝模块(IM)接⼝模块将各个机架连接在⼀起。
不同型号的接⼝模块可⽀持机架扩展或PROFIBUS DP连接。
置于3号机架,没有接⼝模块时,机架位置为空。
(4)信号模块(SM)通常称为I/O(输⼊/输出)模块。
测量输⼊信号并控制输出设备。
信号模块可⽤于数字信号和模拟信号,还可⽤于进⾏连接,如传感器和启动器的连接。
(5)功能模块(FM)⽤于进⾏复杂的、重要的但独⽴于CPU的过程,如:计算、位置控制和闭环控制。
(6)通讯处理器(CP)模块化的通讯处理器通过连接各个SIMATIC站点,如:⼯业以太⽹,PROFIBUS或串⾏的点对点连接等。
后三个模块在机架上可以任意放置,系统可以⾃动分配模块的地址。
需要说明的是,每个机架最多只能安装8个信号模块、功能模块或通讯模块。
如果系统任务超过了8个,则可以扩展机架(每个带CPU的中央机架可以扩展3个机架)。
各个模块的性能具体如下:(1)电源模块(PS)电源模块⽤于将SIMATIC S7-300 连接到120/230V AC电源。
(2)接⼝模块接⼝模块⽤于多机架配置时连接主机架(CR)和扩展机架 (ER)。
S7-300通过分布式的主机架(CR)和3个扩展机架(ER),可以操作多达32个模块。
运⾏时⽆需风扇。
(3)CPU模块各种CPU 有各种不同的性能,例如,有的CPU 上集成有输⼊/输出点,有的CPU上集成有PROFI- BUS-DP通讯接⼝等。
以上只是列出了部分指标,设计时还要参看相应的⼿册。
(4)信号模块信号模块⽤于数字量和模拟量输⼊/输出,⼜分DI/DO(数字量输⼊/输出)和AI/AO(模拟量输⼊/输出)模块。
西门子S7-300可编程控制器应用教程
SIMATIC S7-300系统结构
SIMATIC S7-300 在S7家族中的定位
S7-300系统组成 S7-300系统结构
Date: 2016/5/23
Page: 22
返回本章
§2.1.0 SIMATIC S7-300 在S7家族中的定位
中高端应用 S7-400 中低端应用 S7-300 编程设备 STEP7软件 通讯 人机界面
Date: 2016/5/23
SIMATIC S7-300系统特性
SIMATIC S7-300系统结构 S7-300 CPU模块 信号模块 (SM) 电源模块 (PS) 接口模块(IM) 其他模块(IM) SIMATIC S7-300的硬件组态 思考与练习
Page: 21
返回首页
§2.1
§2.1.0
通信服务(外设、C P U 、总线服务)
PLC正常?
更新时钟、特殊寄存器
扫描 过程
Y
扫描 过程
N
存放自诊断错误结果
STOP
CPU运行方式?
RUN
致命错误?
Y
N
执行程序
出错 处理
CPU强制为STOP 处理程序
Date: 2016/5/23
Page: 17
返回本节
PLC的扫描过程
输
输
I0.0 Q4.1 M10.0 Q4.2 I0.1 I0.1 Q4.1 M10.0 Q4.2
CPU 316-2DP :具有大容量程序存储器和 PROFIBUS DP 主 / 从 接,可进行大规模的I/O配臵,比较适用于
具有分布式或集中式I/O配臵的工厂应用。
Date: 2016/5/23 Page: 33
西门子S7-300全教程第三章

第三章西门子PLC的指令系统3.1 S7-300/400的编程语言3.1.1 PLC编程语言的国际标准IEC 61131是PLC的国际标准,1992~1995年发布了IEC 61131标准中的1~4部分,我国在1995年11月发布了GB/T 15969-1/2/3/4(等同于IEC 61131-1/2/3/4)。
IEC 61131-3广泛地应用PLC、DCS和工控机、―软件PLC‖、数控系统、RTU等产品。
定义了5种编程语言1) 指令表IL(Instruction list):西门子称为语句表STL。
2) 结构文本ST(Structured text):西门子称为结构化控制语言(SCL)。
3) 梯形图LD(Ladder diagram):西门子简称为LAD。
4) 功能块图FBD (Function block diagram):标准中称为功能方框图语言。
5) 顺序功能图SFC(Sequential function chart):对应于西门子的S7 Graph。
3.1.2 STEP 7中的编程语言梯形图、语句表和功能块图是3种基本编程语言,可以相互转换。
1.顺序功能图(SFC) :STEP 7中的S7 Graph2.梯形图(LAD):直观易懂,适合于数字量逻辑控制。
―能流‖(Power flow)与程序执行的方向。
3. 语句表(STL):功能比梯形图或功能块图强。
4.功能块图(FBD):―LOGO!‖系列微型PLC使用功能块图编程。
5.结构文本(ST):STEP 7的S7 SCL(结构化控制语言)符合EN 61131-3标准。
SCL适合于复杂的公式计算、复杂的计算任务和最优化算法,或管理大量的数据等。
6.S7 HiGraph 编程语言图形编程语言S7 HiGraph 属于可选软件包,它用状态图(state graphs)来描述异步、非顺序过程的编程语言。
7.S7 CFC 编程语言可选软件包CFC(Continuous Function Chart,连续功能图)用图形方式连接程序库中以块的形式提供的各种功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 字符
• 时间 •日期
CHAR
TIME DATE
例:'A‘
例:T#20H_31M_23S 例:D#1990-1-1 (时基 1mS) (时基 1天)
•日期时间 TIME_OF_DAY 例:TOD#12:23:45.12
说明: S5TIME 为 SIMATIC时间 范围 S5T#0H_0M_0S_10MS~ S5T#2H_46M_39S_0MS TIME为 IEC时间 范围 T#0 0 0 . 0~ T#23 59 59.999 TIME-OF-DAY 为 日计时 范围 TOD#0:0:0.0~ TOD#23:59:59.999
2 过程映象
PII
字节 0 字节 1 字节 2 : : : 用户程序 1 : : I Q : : : : 字节 0 字节 1 字节 2 : : :
PIQ
1
A =
2.0 4.3
CPU 存储器区
CPU 存储器区
槽号
1
2
4
5
6
7
8
9
10
模块
PS
CPU
SM
SM
SM
SM
SM
SM
SM
地址 0.0 地址 0.7 地址 1.0 地址 1.7
2.2 逻辑操作指令
1. 位逻辑指令 (1)基本逻辑指令:与, 或
(2)基本逻辑指令:异或 (XOR)
• 异或 (XOR)指令练习:
(3)常开和常闭触点,传感器和符号
• 常开常闭触点练习
•与或非操作练习
(4)赋值,置位,复位
• 置位复位操作练习
(5)触发器的置位 / 复位
•置位复位触发器练习
三、复位存储器:
通电后从STOP位置扳到MRES位置,“STOP” LED熄灭1s,亮 1s,再熄灭1s后保持亮。放开开关,使它回到STOP位置,然后又回 到MRES,“STOP” LED以2Hz的频率至少闪动3s,表示正在执行复 位,最后“STOP” LED一直亮。
第二章 PLC编程基础
一、快速认识西门子PLC
0 --- 65,534
0 --- 65,532 0.0 --- 65,535.7 0 --- 65,535 0 --- 65,534 0 --- 65,532
说明:DB块包含由任意一个块存取的数据.DB块用“OPN DB”打开.
DI块用于存取与FB和SFB块的数据. DI块用“OPN DI” 打开. S7同时只能识别一个DB块和一个DI块的数据.
西门子PLC编程
一、状态故障判断
SF(系统出错/故障显示,红色):CPU硬件故障或软件错误时亮。
BATF(电池故障,红色):电池电压低或没有电池时亮。
DC5V(+5V电源指示,绿色):5V电源正常时亮。 FRCE(强制,黄色):至少有一个I/O被强制时亮。 RUN(运行方式,绿色):CPU处于RUN状态时亮;重新启动时以2Hz 的频率闪亮;HOLD(单步、断点)状态时以0.5Hz的频率闪亮。
• 字节
•字 • 双字 • 整数 • 双整数 • 实数 • 时间
BYTE
WORD DWORD INT DINT REAL S5TIME
例: B#16#0~FF
例: W#16#0~ FFFF 例:DW#16#0~FFFF_FFFF 例:-32768~32767 例:-214783648~ 214783647 例: 1.2 或 34.5E-12 例:S5T#2H5M (时基 10mS)
பைடு நூலகம்
3. STEP 7 的可能寻址范围
设计的地址区 访问区域 缩写 加在一起的最大区域
过程映象 I/Q
输入 /输出位
输入 /输出字 输入 /输出双字
I/Q
I/QW I/QD M MB MW
0.0 --- 65,535.7
I/QB 0 --- 65,534 0 --- 65,532 0.0 --- 255.7 0 --- 255 0 --- 254 0 --- 65,535
1.0 1.1 0.0 0.0 2.0 2.1 1.1 1.1 4.0
•中间输出操作练习
(7) RLO - 边沿检测 (检测确 >> I1.0与I1.1的边沿)
例如,有两个开关K1、K2。控制要求,只有两个开关都接通时小灯D1 才亮。当D1亮2秒钟后 小灯D2开始亮。当开关 K3切断时两个小灯就同 时熄灭。
1) 接线程序控制
2)存贮程序控制
(PLC控制)
二、 S7-300/400软件基础
2.1 S7-300的数据环境
1 数据类型 •位 BOOL 例: True 或 False (1 或0)
STOP(停止方式,黄色):CPU处于STOP,HOLD状态或重新启动时 常亮。
BUSF(总线错误,红色)。
二、模式选择开关
RUN-P(运行-编程)位置:运行时还可以读出和修改用户程序,改 变运行方式。
RUN(运行)位置:CPU执行、读出用户程序,但是不能修改用户程 序。
STOP(停止)位置:不执行用户程序,可以读出和修改用户程序。 MRES(清除存储器):不能保持。将钥匙开关从STOP状态扳到 MRES位置,可复位存储器,使CPU回到初始状态。
输入 /输出字节
存储器标志
存储器位 存储器字节 存储器字
存储器双字
I/Q 外部输入/输出 I/Q 字节, 外设 I/Q 字, 外设 I/Q 双字, 外设 定时器 计数器 定时器 (T) 计数器 (C)
MD
0 --- 252
PIB/PQB 0 --- 65,535 PIW/PQW 0 --- 65,534 PID/PQD T C 0 --- 65,532 0 --- 255 0 --- 255
设计的地址区 数据块 数据块
访问区域 数据块 (DB) 用OPN DB打开 位 字节
缩写 DB DBX DBB
加在一起的最大区域 0 --- 65,535 0.0 --- 65,535.7 0 --- 65,535
字
双字 用OPN DI打开 位 字节 字 双字
DBW
DBD DIX DIB DIW DID
(6)中间输出操作
LAD STL
I 1.0
I 1.1
M0.0
I 2.0
I 2.1 NOT
M 1.1
Q 4.0
( )
( )
( )
FBD
I 1.0 I 1.1
& M0.0 & I 2.0 I 2.1 M1.1 Q 4.0 =
A I A I = M A M A I A I NOT = M A M = Q