控制系统调试手册要点
CS5000控制系统现场安装调试使用手册

2
杭州奥立达电梯有限公司
电气部资料----CS5000 控制系统现场使用手册
1、 操作面板的外观及各功能区说明
①、操作面板外观如图 1:
功能指示灯说明:
RUN 灯亮时表示 NICE3000 电梯一体化控
制器处于运转状态。LOCAL/REMOT 保留。
FWD/REV 电梯上下行指示灯:灯亮表示电
梯下行,灯灭表示电梯上行。
TUNE/TC 调谐指示灯,灯亮表示处于调
谐状态。
②、数码显示区:5 位 LED 显示,可显
示运行速度、母线电压等参数。
单位指示灯说明:
所点亮指示灯所对应的单位既表示数 码显示区所显示数值的单位,当两灯同时亮
杭州奥立达电梯有限公司
电气部资料----CS5000 控制系统现场使用手册
CS5000 控制系统现场安装调试使用手册
一、安装注意事项: 1、注意主板上的输入、输出点状态
输入点 X1 X2 X3 X4 X5 X6 X7 X8 X9 X10 X11 X12 X13 X14 X15 X16 X17 X18 X19 X20 X21 X22 X23 X24 Y1
3、通过移位键 >> 切换状态显示参数的操作方法: 通过移位键 >> 切换停机状态参数的显示示例如下:
4
杭州奥立达电梯有限公司
额定 >> 速度
母线 >> 电压
电气部资料----CS5000 控制系统现场使用手册
输入端 >> 输入端 >>
子低位
湖北某电梯厂电梯控制系统调试手册

湖北某电梯厂电梯控制系统调试手册1. 调试准备在进行电梯控制系统的调试之前,首先需要做好准备工作。
确保所有的电梯部件都已经安装完毕,电梯系统的线路已经连接正确,以及所有的控制器和传感器都已经安装好并且通电。
2. 控制系统连接在进行控制系统的调试之前,需要确保所有的电梯部件都已经正确连接到控制器上。
检查所有的电缆连接是否牢固,以及控制器的接线是否正确。
同时,还需要检查所有的传感器和按钮是否能够正确地触发控制器的相应动作。
3. 程序设定在控制系统的调试过程中,需要对控制器的程序进行设定。
确保控制器能够正确地识别楼层位置,根据乘客的选择来控制电梯的运行方向和停靠层。
同时,还需要设定故障和紧急情况下的应对措施。
4. 系统测试完成以上步骤后,即可进行控制系统的测试。
通过模拟乘客的操作,测试控制系统是否能够正确地响应操作,并且能够达到设计要求的运行效果。
同时还需要测试系统在紧急情况下的应对措施,确保系统的安全性能。
5. 故障排查在进行控制系统的调试过程中,可能会遇到一些故障和问题。
对于这些问题,需要及时进行排查和解决。
应该依次检查连接线路、程序设定、传感器和按钮等部件,找出问题所在并进行修复。
6. 完善调试最后,在所有的故障和问题都得到解决后,需要对控制系统进行最后的调试和完善。
确保系统的运行效果和安全性能达到设计要求,同时进行系统参数的调整和设定,使控制系统能够更好地适应不同的运行环境和需求。
总之,电梯控制系统的调试是一个重要的工作,需要对系统的各个部分进行细致的检查和调试,以确保系统能够正确地运行并且具有良好的安全性能。
同时,还需要及时解决控制系统中出现的各种故障和问题,使系统能够更加稳定可靠地运行。
由于电梯控制系统的特殊性和对安全的严格要求,电梯的调试工作至关重要。
在进行调试过程中,需要对控制系统的每个细节都进行深入的检查和测试,以确保电梯能够稳定、安全地运行。
下面我们将详细介绍电梯控制系统的调试工作。
新时达F板串行控制系统调试手册
3
新时达 F 板串行控制系统调试手册
★ JP4.1-JP4.4(CAN1) 接外呼板和轿厢板,必须采用双绞线 TXV+和 TXV-用一对双绞线,TXA1+和 TXA1-用另一对双绞线, 推荐线径 0.75 平方毫米,双绞线的绞合节距 25-35 毫米 JP4.1: TXA1JP4.2: TXA1+ JP4.3: TXV- (0V 电源输出) 不接 不接
JP4.4: TXV+ (+24V 电源输出)
为避免电源干扰,要求 24V 通讯电源从开关电源直接供电。 ★ JP5.1-JP5.4(CAN2) 作并联或群控用,作并联时只要连接对应两台主机的 JP5.2,JP5.3,JP5.4 三根线 JP5.1: TXA2JP5.2: TXA2+ JP5.3: TXV- (0V 电源输出) 不用接线
2
新时达 F 板串行控制系统调试手册
JP1.10: 输入 X9,上平层干簧
(输入类型可更改,出厂值是常开触点)
JP2.1: JP2.2: JP2.3: JP2.4: JP2.5: JP2.6: JP2.7: JP2.8: JP2.9:
输入 X10,下平层干簧 输入 X11,调速器故障输出信号 输入 X12, 消防开关 输入 X13, 安全回路继电器检测 输入 X14, 门锁回路继电器检测 输入 X15,调速器进线接触器检测 输入 X16,调速器出线接触器检测 输入 X17,抱闸继电器检测
★与标准 MODEM 的连线方法: ① SmarTRF1MII 为 9 孔插头,MODEM 端为 9 针插头 SmarTRF1M MODEM
6
新时达 F 板串行控制系统调试手册
1 ------------- 1 2 ------------- 2 3 ------------- 3 4 ------------- 4 5 ------------- 5 ② SmarTRF1MII 为 9 孔插头,MODEM 端为 25 针插头 SmarTRF1M MODEM
洗衣机电子控制系统的设计与调试手册

洗衣机电子控制系统的设计与调试手册洗衣机已经成为了现代家庭中不可或缺的家电之一。
随着科技的进步和人们生活水平的提高,洗衣机的功能不断完善,其中电子控制系统起到了关键作用。
本手册将详细介绍洗衣机电子控制系统的设计与调试方法,帮助您更好地了解和掌握洗衣机的工作原理和调试技巧。
一、洗衣机电子控制系统概述洗衣机电子控制系统是基于微处理器的自动化控制系统,通过集成电路芯片和传感器等元件,实现洗衣机不同工作模式的控制和调节。
其功能主要包括水位控制、水温控制、洗涤程序控制、电机控制、故障检测等。
二、洗衣机电子控制系统设计流程1. 系统需求分析:根据用户需求和产品特性,确定洗衣机电子控制系统的设计目标和功能要求。
2. 系统框架设计:根据需求分析,设计洗衣机电子控制系统的硬件框架和软件架构。
3. 电路设计:设计电子电路,包括传感器信号放大、模数转换、数字信号处理等。
4. 程序设计:编写嵌入式软件程序,实现各种洗衣模式的控制和调节。
5. 系统测试与调试:通过硬件和软件的联合调试,验证洗衣机电子控制系统的功能和性能。
三、洗衣机电子控制系统的关键技术1. 传感器技术:利用水位传感器、温度传感器、压力传感器等,实时监测洗衣机内部环境参数,为控制系统提供准确的反馈信号。
2. 微处理器技术:选用高性能的微处理器芯片,实现洗衣机电子控制系统的数据处理、控制算法和用户界面设计。
3. 通信技术:利用串行通信或无线通信技术,实现洗衣机与用户移动设备的互联互通,提供远程控制和智能化管理功能。
4. 安全保护技术:通过设计合理的电路保护和故障检测机制,保证洗衣机在工作过程中的安全性和可靠性。
四、洗衣机电子控制系统调试方法1. 硬件调试:检查电路连接是否正确,测量各个元件的电压和电流,确保电路工作正常。
对传感器进行校准,调整控制电路的参数,确保系统的准确性和稳定性。
2. 软件调试:通过编程调试工具,对嵌入式软件程序进行单步调试和断点调试,查找和解决程序中的错误和异常。
优迈系统调试指导书

XGM1 控制系统产品说明书调试指导手册目录1 控制系统概述 (4)1.1 总体框图 (4)2 调试指导 (4)2.1 检查控制柜 (5)2.2 接线检查 (5)2.3 绝缘检查 (5)2.4 检查输入电压 (5)2.5 检查控制变压器输出电压 (5)3 检修模式A LMCB 上电检查 (5)3.1 检查A LMCB 的输入输出电压 (5)3.2 上电检查LMCB 的状态 (6)4 A LMCB 驱动部分参数设置 (8)5 LMCB 驱动部分调试 (15)5.1 运行状态设置 (15)5.2 使用同步电机的主机 (16)5.3 使用异步电机的主机 (18)6 电梯运行方向检查 (19)7 点动运行模式 (19)7.1 紧急电动运行(ERO ) (19)7.2 轿顶检修运行(TCI ) (19)8 位置参考系统调整 (20)8.1 极限开关的调整 (20)8.2 调整轿顶光电开关和井道隔光板 (20)9 首次正常运行准备 (21)9.1 安全、门锁回路检查 (21)9.2 确认井道信号 (21)10 井道位置自学习 (21)11 DCS (门检测运行)操作 (21)12 正常运行 (22)13 正常运行的平层位置的调整 (22)14 起动力矩调整 (23)15 振动性能调整 (23)16 故障排除 (24)1控制系统概述新XGM1系统引用了A LMCB (逻辑控制板)作为电梯控制系统的核心,充分吸收了先进技术可靠性的串行通讯系统,将电梯的各个部件紧密的连在一起。
驱动部分则采用高精度的矢量变频技术,使电梯的运行更加平稳舒适,同时其流畅简洁的外观也令人赏心悦目。
ALMCB内部包括四个部分:逻辑控制部分、运动控制部分、门机部分、驱动控制部分,见图图1逻辑控制功能框图1.1总体框图XGM1控制系统的基本框图和信号流程图,见图2。
2调试指导提示:在动慢车之前,所有的机械部件都已经调试完成,具体请参考相关安装指导书。
西继迅达电梯SM5600 V2控制系统说明书调试手册
目录目录 (1)第一章SM 5600串行控制系统功能介绍 (7)1.1. 基本功能列表 (7)1.2. 特殊功能列表 (9)1.3. 安全保护功能列表 (12)1.4. 可选功能列表 (12)第二章SM 5600串行控制系统板类产品型号 (13)2.1. 产品型号命名方法 (13)1. 基本规则 (13)2. 主控电脑板、轿顶电脑板、轿厢电脑板、轿厢扩展板、外呼板命名 (13)2.2. SM5600串行系统板类产品型号列表 (13)第三章SM 5600串行控制系统构成与部件介绍 (14)3.1. 系统结构框图 (14)3.2. 系统主要部件性能指标 (14)3.2.1. 性能特点 (15)3.2.2. 适用范围 (15)3.2.3. 参照标准 (15)3.2.4. 电源规格 (15)3.2.5. 工作温度 (15)3.2.6. 检测指标 (15)3.3. 系统主要部件分类介绍 (16)3.3.1. 主控电脑板SM 5600-V2 (16)3.3.2. 人机交互界面SM5600HMI (19)3.3.3. 轿顶电脑板SM 5600-02A (20)3.3.4. 轿厢电脑板SM 5600-02B (23)3.3.5. 轿厢扩展板SM 5600-02C (25)3.3.6. 外召及显示电脑板SM5600-04A (26)第四章SM 5600串行控制系统的安装 (29)4.1. 重要提示 (29)4.2. 检查 (29)4.3. 系统安装 (29)4.3.1. 安装技术要求 (29)4.3.2. SM 5600系列部件安装 (29)4.3.3. 系统其它部件安装 (30)4.3.4. 控制系统接地 (31)第五章SM 5600串行控制系统参数设置 (32)5.1. 概述 (32)5.2. 系统菜单结构与流程 (33)5.2.1. 主菜单 (34)5.2.2. 通讯状态菜单 (34)5.2.3. 密码校验界面 (34)5.2.4. 监视菜单与参数设置菜单 (34)5.2.5. 菜单设置操作提示 (35)5.3. 监视参数菜单设置与操作 (35)5.3.1. 监视参数表 (35)5.3.2. 设置与操作 (35)1. 选层信息 (35)2. 层站信息 (36)3. 井道开关位置 (36)4. 输入输出 (37)5. 速度反馈 (37)6. 运行记录 (38)7. 故障记录 (38)8. 呼梯测试 (38)9. 输入信号 (39)10. 输出信号 (39)11. 轿厢信号 (39)12. 开/关门输入 (40)13. 通讯测试 (40)14. 软件版本号 (40)5.4. 基本参数菜单设置与操作 (40)5.4.1. 基本参数表 (40)1. 初始步骤 (40)2. 基本参数表 (41)5.4.2. 设置与操作 (41)1. 总楼层数设定 (41)2. 待梯层设定 (42)3. 系统时间设定 (42)4. 自动开门保持时间设定 (42)5. 开门延长时间设定 (42)6. 返基站时间设定 (43)7. 自动开梯时间设定 (43)8. 自动关梯时间设定 (43)9. 消防层设置 (43)10. 锁梯层设定 (43)11. 主控板输入类型 (44)12. 轿顶输入类型 (45)13. 保修时间 (46)14. 层站显示设置 (46)15. 停靠层设置 (46)16. 多段速方式设定 (47)17. 开门延长使能设定 (47)18. 抱闸反馈检测使能设定 (47)19. 开门选择设定 (47)20. 关灯时间 (48)21. F参数 (48)5.5. 运行参数菜单设置与操作 (48)5.5.1. 运行参数表 (48)5.5.2设置与操作 (50)1. 电梯额定速度设定 (50)2. 电机额定转速设定 (50)3. 编码器脉冲数设定 (50)4. 检修运行速度 (50)5. 爬行速度 (51)6. 开门速度 (51)7. 开门超限速度 (51)8. 开门平层速度 (51)9. 单层运行速度 (51)10. 延时开闸 (52)11. 启动速度曲线 (52)12. 抱闸延时 (52)13. 加速斜率A1设定 (52)14. 减速斜率A2设定 (52)15. S时间1——P1设定 (53)16. S时间2——P2设定 (53)17. S时间3——P3设定 (53)18. S时间4——P4设定 (53)19. 零速设置 (53)20. 零速时间 (53)21. 延时抱闸 (54)22. 平层调整 (54)23. 试运行 (54)5.6. 特殊参数菜单设置与操作 (54)5.6.1. 特殊参数表 (54)5.6.2. 设置与操作 (55)1. 开/关门继电器保持时间设定 (55)2. 运行超时时间设定 (55)3. 并联使能设定 (56)4. 群控使能设定 (56)5. 远程监控设定 (56)6. 消防方式 (57)7. 远程梯号 (57)8. 并联梯号设定 (57)9. 恢复出厂值 (57)10. 多段速度值设定 (58)11. 减速距离设定 (60)12. 贯通门 (60)13. 开关门到位检测 (61)14. Inventer (61)5.7. 其它参数菜单设置与操作 (61)5.7.1. 保存参数 (61)5.7.2. 井道自学习 (62)5.7.3. 密码设置 (63)5.7.4. 参数拷贝 (63)第六章SM5600串行控制系统调试与运行 (64)6.1. 重要提示 (64)6.2. 通电前检查 (64)6.3. 通电和检查 (65)6.3.1. 通电前确认 (65)6.3.2. 通电后检查 (65)6.4. 系统参数设定 (66)6.5. 电机参数自学习及原点整定 (66)6.5.1. 富士G11UD(异步)具体步骤 (66)6.5.2. 西威A VY(永磁同步)电机参数自调谐及原点自学习 (66)6.6. 慢车试运行 (67)6.6.1. 机房检修运行 (67)6.6.2. 轿顶及轿厢检修运行 (68)6.7. 井道自学习 (68)6.7.1. 井道自学习前的检查 (68)6.7.2. 井道自学习 (69)6.7.3. 井道自学习故障信息的查看 (69)6.8. 快车试运行 (69)6.9. 轿厢及外呼显示板地址的设定方法 (69)6.10. 终端电阻的跳接及测量 (70)6.11. 多段速设置 (71)6.11.1. 电梯运行控制时序的调整 (71)1. Inverter Type (71)2. 延时开闸 (71)3. 启动运行曲线 (71)4. 抱闸延时 (71)5. 零速设置 (71)6. 零速时间 (71)6.11.2. 多段速方式调整 (71)1. 多段速度值设置 (71)2. 多段速度指令输出逻辑 (72)6.12. 平层精度调整 (72)6.13. 功能测试 (73)6.14. 故障查询 (73)第七章提前开门/再平层 (74)7.1. 提前开门安全电路板(SM5000-05) (74)7.2. 提前开门安全电路板(SM5000-05)原理图 (74)7.3. 提前开门安全电路板(SM5000-05)接口定义 (75)7.4. 提前开门安全电路板(SM5000-05)与主控板的接线图 (75)7.5. 再平层门区感应器及门区感应器的安装方法 (75)7.6. 参数设置 (76)第八章SM5600串行控制系统的并联与群控 (77)8.1. SM5600并联控制的说明 (77)8.1.1. 简述 (77)8.1.2. 并联运行的参数设置及要求 (77)1. 参数的设置 (77)2. 并联接线示意图 (77)3. 并联运行的要求 (78)4. 功能确认 (78)8.2. SGC5000群控系统介绍 (78)8.2.1. SGC5000群控板 (78)8.2.2. SGC5000群控板的基本特点 (78)8.2.3. SGC5000群控电脑板显示信息及端子定义 (79)1. SGC5000群控主板端子定义 (79)2. SGC5000-02群控扩展端子定义 (80)3. SGC5000群控板显示信息 (80)8.2.4. SGC5000接线图 (81)8.2.5. SM5000群控运行的参数设置及要求 (81)第九章SM5600串行控制系统故障分析 (82)9.1. 检修运行条件 (82)9.2. 检修运行速度低、电流大 (82)9.3. 主控电脑板显示的速度不正确 (82)9.4. 通讯不正常检查 (82)9.5. 开关电源(5V/24V)异常 (83)9.6. 没有方向及抱闸输出信号的检查 (83)9.7. 电梯不关门 (83)9.8. 安全回路接触器(KAS)触点状态与线圈状态不一致(ER02) (84)9.9. KMY接触器输出与反馈结果不一致(ER04) (84)9.10. 抱闸接触器检测故障(ER05) (84)9.11. 脉冲数过少或A、B方向错误(ER11) (84)9.12. 门联锁继电器触点状态与线圈状态不一致(ER16,ER17) (85)9.13. 抱闸反馈检测故障(ER18) (85)9.14. 主控电脑板未收到变频器运行信号反馈(ER21) (85)9.15. 不能快车运行(ER25) (85)9.16. 楼层位置计数器错误(ER28) (85)9.17. 电梯运行方向与指令方向相反(ER30) (85)9.18. 低速度换速距离大于单层间距(ER41) (86)附录 (87)附录1. 同步电机控制配西威变频连接图与时序图 (87)1. 变频器连接图 (87)2. SM5600+西威时序图 (88)附录2. 同步电机控制配CT变频连接图与时序图 (89)1. 变频器连接图 (89)2. SM5600+CT时序图 (90)附录3. 系统故障代码表 (91)附录4. 自学习故障代码表 (98)附录5. 层站显示字符表 (100)第一章SM 5600串行控制系统功能介绍1.1. 基本功能列表外呼显示“”后,按慢上或慢下按钮,电梯会以检修速1.2. 特殊功能列表1.3. 安全保护功能列表1.4. 可选功能列表第二章 SM 5600串行控制系统板类产品型号2.1. 产品型号命名方法1. 基本规则SM 5600—□□2. 主控电脑板、轿顶电脑板、轿厢电脑板、轿厢扩展板、外呼板命名⑴主控电脑板: SM 5600-V2⑵轿顶电脑板: SM 5600-02A -V2 ⑶轿厢通信板: SM 5600-02B -V2 ⑷轿厢扩展板: SM 5600-02C ⑸外呼板: SM 5600-04A ⑹提前开门板: SM 5000-05 ⑺其它请参见产品型号列表。
西继迅达电梯SM5600 V2控制系统说明书调试手册
目录目录 (1)第一章SM 5600串行控制系统功能介绍 (7)1.1. 基本功能列表 (7)1.2. 特殊功能列表 (9)1.3. 安全保护功能列表 (12)1.4. 可选功能列表 (12)第二章SM 5600串行控制系统板类产品型号 (13)2.1. 产品型号命名方法 (13)1. 基本规则 (13)2. 主控电脑板、轿顶电脑板、轿厢电脑板、轿厢扩展板、外呼板命名 (13)2.2. SM5600串行系统板类产品型号列表 (13)第三章SM 5600串行控制系统构成与部件介绍 (14)3.1. 系统结构框图 (14)3.2. 系统主要部件性能指标 (14)3.2.1. 性能特点 (15)3.2.2. 适用范围 (15)3.2.3. 参照标准 (15)3.2.4. 电源规格 (15)3.2.5. 工作温度 (15)3.2.6. 检测指标 (15)3.3. 系统主要部件分类介绍 (16)3.3.1. 主控电脑板SM 5600-V2 (16)3.3.2. 人机交互界面SM5600HMI (19)3.3.3. 轿顶电脑板SM 5600-02A (20)3.3.4. 轿厢电脑板SM 5600-02B (23)3.3.5. 轿厢扩展板SM 5600-02C (25)3.3.6. 外召及显示电脑板SM5600-04A (26)第四章SM 5600串行控制系统的安装 (29)4.1. 重要提示 (29)4.2. 检查 (29)4.3. 系统安装 (29)4.3.1. 安装技术要求 (29)4.3.2. SM 5600系列部件安装 (29)4.3.3. 系统其它部件安装 (30)4.3.4. 控制系统接地 (31)第五章SM 5600串行控制系统参数设置 (32)5.1. 概述 (32)5.2. 系统菜单结构与流程 (33)5.2.1. 主菜单 (34)5.2.2. 通讯状态菜单 (34)5.2.3. 密码校验界面 (34)5.2.4. 监视菜单与参数设置菜单 (34)5.2.5. 菜单设置操作提示 (35)5.3. 监视参数菜单设置与操作 (35)5.3.1. 监视参数表 (35)5.3.2. 设置与操作 (35)1. 选层信息 (35)2. 层站信息 (36)3. 井道开关位置 (36)4. 输入输出 (37)5. 速度反馈 (37)6. 运行记录 (38)7. 故障记录 (38)8. 呼梯测试 (38)9. 输入信号 (39)10. 输出信号 (39)11. 轿厢信号 (39)12. 开/关门输入 (40)13. 通讯测试 (40)14. 软件版本号 (40)5.4. 基本参数菜单设置与操作 (40)5.4.1. 基本参数表 (40)1. 初始步骤 (40)2. 基本参数表 (41)5.4.2. 设置与操作 (41)1. 总楼层数设定 (41)2. 待梯层设定 (42)3. 系统时间设定 (42)4. 自动开门保持时间设定 (42)5. 开门延长时间设定 (42)6. 返基站时间设定 (43)7. 自动开梯时间设定 (43)8. 自动关梯时间设定 (43)9. 消防层设置 (43)10. 锁梯层设定 (43)11. 主控板输入类型 (44)12. 轿顶输入类型 (45)13. 保修时间 (46)14. 层站显示设置 (46)15. 停靠层设置 (46)16. 多段速方式设定 (47)17. 开门延长使能设定 (47)18. 抱闸反馈检测使能设定 (47)19. 开门选择设定 (47)20. 关灯时间 (48)21. F参数 (48)5.5. 运行参数菜单设置与操作 (48)5.5.1. 运行参数表 (48)5.5.2设置与操作 (50)1. 电梯额定速度设定 (50)2. 电机额定转速设定 (50)3. 编码器脉冲数设定 (50)4. 检修运行速度 (50)5. 爬行速度 (51)6. 开门速度 (51)7. 开门超限速度 (51)8. 开门平层速度 (51)9. 单层运行速度 (51)10. 延时开闸 (52)11. 启动速度曲线 (52)12. 抱闸延时 (52)13. 加速斜率A1设定 (52)14. 减速斜率A2设定 (52)15. S时间1——P1设定 (53)16. S时间2——P2设定 (53)17. S时间3——P3设定 (53)18. S时间4——P4设定 (53)19. 零速设置 (53)20. 零速时间 (53)21. 延时抱闸 (54)22. 平层调整 (54)23. 试运行 (54)5.6. 特殊参数菜单设置与操作 (54)5.6.1. 特殊参数表 (54)5.6.2. 设置与操作 (55)1. 开/关门继电器保持时间设定 (55)2. 运行超时时间设定 (55)3. 并联使能设定 (56)4. 群控使能设定 (56)5. 远程监控设定 (56)6. 消防方式 (57)7. 远程梯号 (57)8. 并联梯号设定 (57)9. 恢复出厂值 (57)10. 多段速度值设定 (58)11. 减速距离设定 (60)12. 贯通门 (60)13. 开关门到位检测 (61)14. Inventer (61)5.7. 其它参数菜单设置与操作 (61)5.7.1. 保存参数 (61)5.7.2. 井道自学习 (62)5.7.3. 密码设置 (63)5.7.4. 参数拷贝 (63)第六章SM5600串行控制系统调试与运行 (64)6.1. 重要提示 (64)6.2. 通电前检查 (64)6.3. 通电和检查 (65)6.3.1. 通电前确认 (65)6.3.2. 通电后检查 (65)6.4. 系统参数设定 (66)6.5. 电机参数自学习及原点整定 (66)6.5.1. 富士G11UD(异步)具体步骤 (66)6.5.2. 西威A VY(永磁同步)电机参数自调谐及原点自学习 (66)6.6. 慢车试运行 (67)6.6.1. 机房检修运行 (67)6.6.2. 轿顶及轿厢检修运行 (68)6.7. 井道自学习 (68)6.7.1. 井道自学习前的检查 (68)6.7.2. 井道自学习 (69)6.7.3. 井道自学习故障信息的查看 (69)6.8. 快车试运行 (69)6.9. 轿厢及外呼显示板地址的设定方法 (69)6.10. 终端电阻的跳接及测量 (70)6.11. 多段速设置 (71)6.11.1. 电梯运行控制时序的调整 (71)1. Inverter Type (71)2. 延时开闸 (71)3. 启动运行曲线 (71)4. 抱闸延时 (71)5. 零速设置 (71)6. 零速时间 (71)6.11.2. 多段速方式调整 (71)1. 多段速度值设置 (71)2. 多段速度指令输出逻辑 (72)6.12. 平层精度调整 (72)6.13. 功能测试 (73)6.14. 故障查询 (73)第七章提前开门/再平层 (74)7.1. 提前开门安全电路板(SM5000-05) (74)7.2. 提前开门安全电路板(SM5000-05)原理图 (74)7.3. 提前开门安全电路板(SM5000-05)接口定义 (75)7.4. 提前开门安全电路板(SM5000-05)与主控板的接线图 (75)7.5. 再平层门区感应器及门区感应器的安装方法 (75)7.6. 参数设置 (76)第八章SM5600串行控制系统的并联与群控 (77)8.1. SM5600并联控制的说明 (77)8.1.1. 简述 (77)8.1.2. 并联运行的参数设置及要求 (77)1. 参数的设置 (77)2. 并联接线示意图 (77)3. 并联运行的要求 (78)4. 功能确认 (78)8.2. SGC5000群控系统介绍 (78)8.2.1. SGC5000群控板 (78)8.2.2. SGC5000群控板的基本特点 (78)8.2.3. SGC5000群控电脑板显示信息及端子定义 (79)1. SGC5000群控主板端子定义 (79)2. SGC5000-02群控扩展端子定义 (80)3. SGC5000群控板显示信息 (80)8.2.4. SGC5000接线图 (81)8.2.5. SM5000群控运行的参数设置及要求 (81)第九章SM5600串行控制系统故障分析 (82)9.1. 检修运行条件 (82)9.2. 检修运行速度低、电流大 (82)9.3. 主控电脑板显示的速度不正确 (82)9.4. 通讯不正常检查 (82)9.5. 开关电源(5V/24V)异常 (83)9.6. 没有方向及抱闸输出信号的检查 (83)9.7. 电梯不关门 (83)9.8. 安全回路接触器(KAS)触点状态与线圈状态不一致(ER02) (84)9.9. KMY接触器输出与反馈结果不一致(ER04) (84)9.10. 抱闸接触器检测故障(ER05) (84)9.11. 脉冲数过少或A、B方向错误(ER11) (84)9.12. 门联锁继电器触点状态与线圈状态不一致(ER16,ER17) (85)9.13. 抱闸反馈检测故障(ER18) (85)9.14. 主控电脑板未收到变频器运行信号反馈(ER21) (85)9.15. 不能快车运行(ER25) (85)9.16. 楼层位置计数器错误(ER28) (85)9.17. 电梯运行方向与指令方向相反(ER30) (85)9.18. 低速度换速距离大于单层间距(ER41) (86)附录 (87)附录1. 同步电机控制配西威变频连接图与时序图 (87)1. 变频器连接图 (87)2. SM5600+西威时序图 (88)附录2. 同步电机控制配CT变频连接图与时序图 (89)1. 变频器连接图 (89)2. SM5600+CT时序图 (90)附录3. 系统故障代码表 (91)附录4. 自学习故障代码表 (98)附录5. 层站显示字符表 (100)第一章SM 5600串行控制系统功能介绍1.1. 基本功能列表外呼显示“”后,按慢上或慢下按钮,电梯会以检修速1.2. 特殊功能列表1.3. 安全保护功能列表1.4. 可选功能列表第二章 SM 5600串行控制系统板类产品型号2.1. 产品型号命名方法1. 基本规则SM 5600—□□2. 主控电脑板、轿顶电脑板、轿厢电脑板、轿厢扩展板、外呼板命名⑴主控电脑板: SM 5600-V2⑵轿顶电脑板: SM 5600-02A -V2 ⑶轿厢通信板: SM 5600-02B -V2 ⑷轿厢扩展板: SM 5600-02C ⑸外呼板: SM 5600-04A ⑹提前开门板: SM 5000-05 ⑺其它请参见产品型号列表。
默纳克调试手册
编 号:GCJ12-023版本号:01广日默纳克一体化控制系统调试手册编 制 蔡欣正校 对 黄国邦标准化 宋锦洪审 定 刘森荣批 准 覃炳乐广州广日电梯工程有限公司2013年6月工修13-0028 蔡欣正 2013年6月更改文件号 签字 日期 更改文件号 签字 日期说明:本使用说明所列的全部内容仅适用于广日工程改造默纳克控制系统调试。
目 录(一) 调试操作面板操作说明 (2)(二) 电机自学习说明 (6)(三) 电梯调试 (7)(四) 功能参数表说明(其中F1~F6,F8为主要参数,其余无必要不需更改) (12)(五) 功能参数说明 (23)(六) 故障说明 (37)图1-1-1 操作面板示意1.调试操作面板操作说明1.1 操作面板的外观及各功能区说明操作面板外观如图1-1-1: ¾ 功能指示灯说明:RUN 灯亮时表示NICE3000电梯一体化控制器处于运转状态。
LOCAL/REMOT 保留。
FWD/REV 电梯上下行指示灯:灯亮表示电梯下行,灯灭表示电梯上行。
TUNE/TC 调谐指示灯,灯亮表示处于调谐状态。
¾ 数码显示区:5位LED 显示,可显示运行速度、母线电压等参数。
¾ 单位指示灯说明:所点亮指示灯所对应的单位既表示数码显示区所显示数值的单位,当两灯同时亮时表示两灯下方中间处的单位值。
Hz 频率单位 A 电流单位 V 电压单位 RPM 转速单位 %百分数¾ 操作面板键盘按钮说明:按键 名称 功能PRG 编程键 一级菜单的进入和退出,快捷参数删除 ENTER 确认键 逐级进入菜单画面、设定参数确认 ∧ 递增键 数据或功能码的递增 ∨ 递减键 数据或功能码的递减>> 移位键 在停机状态和运行状态下,可以循环选择LED 的显示参数;在修改参数时,可以选择参数的修改位 RUN运行键 在键盘操作方式下,用于启动运行STOP/RESET 停止/复位 键盘操作运行状态时,按此键可用于停止运行操作;故障报警状态时,可用来复位操作QUICK 快捷键进入或退出快捷菜单的一级菜单 MF.K多功选择能键故障信息的显示与消隐1.1.4小键盘的功能及使用说明小键盘由3位数码管与3位按键组成,主要负责主控板MCB控制器的信息显示,以及简单的命令输入。
优迈系统调试指导书

优迈系统调试指导书(正文)优迈系统调试指导书1. 概述优迈系统是一个先进的自动化控制系统,用于实现各种工业过程的控制和监测。
本指导书旨在提供一份系统调试的详细指南,帮助用户顺利完成系统的安装和调试,并确保系统的正常运行。
2. 硬件安装2.1 安装控制器优迈系统的控制器是系统的核心部件,负责接收和处理各种信号,并输出控制指令。
在安装控制器之前,确保电源已经断开,并按照以下步骤进行操作:(1)将控制器的支架固定在合适的位置,并确保其稳固。
(2)将控制器插入支架,确保连接牢固。
(3)连接控制器和其他设备的信号线,确保接触良好。
2.2 连接传感器传感器是优迈系统的输入设备,用于采集各种物理量。
在连接传感器之前,请参考其产品手册,并按照以下步骤进行操作:(1)将传感器的引线连接到相应的接口上,确保连接牢固。
(2)检查传感器的供电是否正常,并调整传感器的参数以适应实际应用需求。
3. 软件设置3.1 安装软件在开始软件设置之前,请确保已经将优迈系统的软件正确安装到计算机上。
按照安装向导的指示进行操作,并确保安装过程顺利完成。
3.2 创建工程(1)打开优迈系统软件,并选择“新建工程”。
(2)根据实际需求,填写工程名称和相关信息,并选择适当的模板。
(3)点击“确定”按钮,创建工程。
3.3 配置硬件(1)打开新创建的工程,并选择“硬件配置”。
(2)在硬件配置界面,根据实际硬件设备的情况,选择合适的设备,并进行连接设置。
(3)保存配置,并退出硬件配置界面。
4. 系统调试4.1 信号检测在进行系统调试之前,请确保所有的信号源已经接入到系统中,并按照以下步骤进行检测:(1)进入优迈系统的信号检测界面。
(2)逐个检查每个信号源,并确认其信号是否正常。
(3)记录每个信号的数值,并与实际测量结果进行比对。
4.2 控制指令验证在进行系统调试之前,请确保已经定义了正确的控制策略,并进行以下验证步骤:(1)进入优迈系统的控制界面。
(2)手动修改某个控制参数,并观察系统的响应。
08-32捣固车作业控制系统调试手册

大型养路机械作业控制系统调试手册(一)08-32捣固车作业控制系统标定程序检查所有电路板、传感器正常或经过测试仪器检查调试后再进行,同时机器在标定线上进行标定。
一、GVA输出数据的检查GVA输入一条曲线,根据曲线要素,同时看GVA显示的数据量,测量以下数据的换算后的电压值是否一致。
如:设定曲线要素为:R=1000m L=100m H=120mm,让机械车在三点法的作业模式下,它的作业位置处于圆曲线中,测量以下的数据:1.拨道正矢E30(50mv/mm),Versine= 27.48mm,所以E30=1.374V2.基本起道量E31(69mv/mm)3.前理论超高E25(50mv/mm),C.ADJ.FR=120mm,所以E25=6V4.作业区理论超高F1F(50mv/mm),Cant=120mm,所以F1F=6V5.起道减少量E55(100mv/mm),LIFT=1.65mm,所以E55=0.165V二、拨道系统的标定拨道系统、GVA都要打开,并要加载(左或右)。
1.五路拨道显示板4u2的校准1.1 将“4u2”置于“4”档(人工给定偏移量FD),调动手动输入“4f4”的电位器,使得4u2中B输入为0,调4u2上的P7,使得拨道显示器“4g2”显示为“0”。
1.2 将“4u2”置于“5”档(人工给定正矢+GVA),调动手动输入“4f1”的电位器为0,使得4u2中A输入为0,调4u2上的P6,使显示器“4g2”显示为“0”。
1.3 将“4u2”置于“3”档(GVA),测量4u2中C输入为0,调4u2上的P8,使显示器“4g2”显示为“0”。
1.4 将“4u2”置于“2”档(人工给定偏移量+激光),测量4u2中D输入为0,调4u2上的P9,使显示器“4g2”显示为“0”。
1.5 “4u2”置于“1”档(总偏移量),测量4u2中E输入为0,调4u2上的P10,使显示器“4g2”显示为“0”。
1.6 将“4u2”置于“4”档(人工给定偏移量FD),调动手动提升输入“4f4”的电位器,使得4u2中B输入为9V,调4u2上的P2,使得拨道显示器“4g2”显示为“180”。
S90系列电梯控制系统调试手册-Ae8_2013.3
1. 现场机械装配的再次检查及确认.................................................................................................9 2. 电气装配的再次检查及确认.........................................................................................................9 3. 电梯井道层楼自学习...................................................................................................................10 4. 串行外呼板的调试方法:...........................................................................................................10
第六章 电梯平层及舒适感的调整..................................................................................................14
1. 平层位置的调整...........................................................................................................................14 2. 电梯起动舒适感的调整...............................................................................................................14 3. 电梯停止时舒适感的调整...........................................................................................................15
Pantec首次调试手册
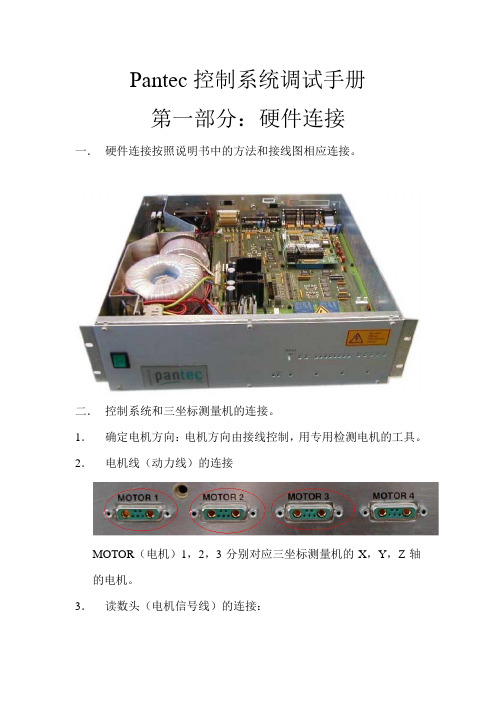
Pantec控制系统调试手册第一部分:硬件连接一.硬件连接按照说明书中的方法和接线图相应连接。
二.控制系统和三坐标测量机的连接。
1.确定电机方向:电机方向由接线控制,用专用检测电机的工具。
2.电机线(动力线)的连接MOTOR(电机)1,2,3分别对应三坐标测量机的X,Y,Z轴的电机。
3.读数头(电机信号线)的连接:EXE1,EXE2,EXE3分别对应电机信号线的X,Y,Z轴的信号线。
4.测针的连接:5.急停信号的的连接备注:线应可靠接地。
三.控制系统和计算机的接线连接:1.RS232通讯线的连接:另一端和计算机的9针通讯并口连接。
2.RS232/2信号输出连接另一端和计算机的通讯并口连接。
三.操纵杆(终端信号)的连接:终端信号分为两端,9针的一端连接计算机的9针通讯并口(做虚拟操纵杆用,一般不接),另一端连接操纵杆。
再仔细检查硬件连接,最后连接电源线。
四.硬件连接完毕。
五.通电。
六.硬件连接后应仔细检查线路,在确认无误的情况下通电,通电后控制系统前面的指示灯正常显示,显示状态为:五.伺服状态显示为:第二部分:软件调试一.Pantec调试软件的安装,软件安装完毕后会在桌面上生成如下两个图标:,。
二.启动调试软件,双击桌面上的调试软件图标:打开调试软件。
(1)控制系统初始化(注:只有新的控制系统需要初始化,一般情况下不对控制系统进行初始化):在Terminal….窗口中输入相应命令,按回车确认。
Terminal(仿真程序)窗口打开方法:Watch Window(观察窗口)窗口打开方法:Position(位置)窗口的打开方法:备注:在控制系统初始化的过程中在完成第一步骤后,关掉软件里面的Terminal和Watchwind窗口,打开在“属性“里将波特率改为38400并确认,点击”test”测试。
重新打开Terminal命令窗口,依次输入2——9步骤关闭此命令窗口,把波特率改回原来的115200并测试。
广日G12电梯控制系统调试手册
181********/16/2012编 号:SJG11-016版本号:01G12电梯控制系统调试手册编 制 潘 政校 对 李吴达标准化 黄展鹏审 定 夏嘉乐批 准 张 研广州广日电梯工业有限公司2012年 4月修改12-0285更改文件号 签字 日期 更改文件号 签字 日期1.2.2当G12控制系统增加微动平层功能时,需按下图安装隔磁板和光电开关,在平层位置时,MQG、MQ1、MQ2均插入在隔磁板的正中间。
注:SQG、MQG、XQG 光电开关插入隔磁板后是常开状态,MQ1、MQ2光电开关插入隔磁板后是常闭状态。
二、慢车、快车调试说明2.1现场调试准备2.1.1首先检查是否具备调试条件:1)用户有否按要求将电源提供到机房(正常或临时); 2)主机加油量是否合适,型号是否正确; 3)底坑缓冲器安装完成否;4)各层厅门、门锁是否安装完毕; 5)电梯接线是否已全部完成; 6)机房线槽是否已上好盖;7)井道引线的金属软管是否固定良好; 8)各层厅门门套是否已塞好;9)井道有否妨碍轿厢、对重架运行的物体; 2.1.2电气接线检查2.1.2.1机房电气接线检查 序号 检查的回路 测试点 测试标准方法1 盘车手轮开关 F8-1、F8-2正常为ON 用万用表测量测试点的阻值(ON 约为0Ω,OFF 为>0.5M Ω)2 底坑检修箱急停底坑入口箱急停F14-2、F14-3正常为ON 3 下极限限速器断绳开关 缓冲器F5-1、F5-3正常为ON 4 限速器开关 F8-3、F8-4 正常为ON 5 上极限 F6-1、F6-2 正常为ON 6 轿厢急停 F1-7、F1-8 正常为ON7 轿门锁 F1-8、F1-9 正常为ON8 厅门开关 F9-2、F9-3 所有厅门关上时为ON9限位开关上 F6-3、F6-5 打板未打到开关时开关状态为ON下F5-4、F5-5 10强迫减速开关上 SHK F6-3、F6-6SHK1F6-3、F6-7SHK2 F6-3、F6-8 下 XHK F5-4、F5-6XHK1F5-4、F5-7 XHK2 F5-4、F5-811消防开关 F9-4、F9-5 正常为OFF 12 照明AC220V F1-1、F1-3 接线正常 13 门机电源AC220V F1-4、F1-5接线正常 14 抱闸反馈开关F7-1、F7-2F7-4、F7-5抱闸合上时为ON15抱闸线圈KA-9、KA-10KA-10接抱闸线圈的正端,KA-9接抱闸线圈的负端 用万用表测量测试点的阻值2.1.2.2轿顶电气接线检查序号 检查回路 测试端子 测试标准 方法 1 主门轿门锁 D7-2、D7-3 主门轿门关上时ON 用手查线,用万用表测量2 副门轿门锁(若有) D8-2、D8-3 副门轿门关上时ON 3 安全钳开关 D5-1、D5-2 正常时ON 4 安全窗开关(若有) D6-1、D6-2 正常时ON5门区感应器装置 D9-1、D9-2、D9-3 用手查线微动平层装置(若有) D9-4、D9-5、D9-6D、9-7 用手查线6 主门安全触板开关 左 DL-14、DL-4常闭右 DL-4、DL-57 副门安全触板开关 (若有) 左DL-14、DL-7 常闭右 DL-7、DL-88 主门光电开关(若有) DL-15、DL-10、DL-5、DL-6用手查线 9 副门光电开关(若有) DL-15、DL-10、DL-8、DL-9用手查线 10 轿厢照明 D4-1、D4-2 至LED 灯 11 停电应急照明 D4-3、D4-4 至停电应急照明灯 12 轿厢风扇 D3-1、D3-2 至风扇 13 主门门机电缆 D1 用手查线 14 副门门机电缆 D2 用手查线 15 主门光幕 D12、D13 用手查线 16 副门光幕 D14、D15 用手查线 2.1.2.3轿厢通信板接线检查在安装小组确认插接电缆C1、C2、C3、C4、C5连接正确,用万用表在轿顶对各控制总线的接线进行测量。
电动阀门控制系统调试说明书

电动阀门控制系统调试说明书1.系统概述电动阀门控制系统是一种用于控制阀门开关的自动化设备。
本系统采用电动执行器与阀门相连,通过控制电动执行器的运行来实现阀门的开关控制。
本说明书将详细介绍系统的调试步骤与注意事项。
2.调试步骤2.1 系统参数设置在进行调试之前,首先需要设置系统参数。
包括电动执行器的动作速度、动作力矩以及开关程度等参数。
根据实际需求,合理设置这些参数能够保证阀门的准确控制。
参数设置的具体方法可以参考附带的使用手册。
2.2 电源连接与电气设备检查将电动阀门控制系统与电源连接,并确保电源电压符合设备要求。
注意检查电气设备的接线是否正确,避免短路等安全问题的发生。
2.3 信号源配置调试之前需要配置一个信号源,用于发送控制信号。
根据系统的通信协议,设置好信号源的参数,包括通信协议、通信地址等。
确保信号源与控制系统能够正常通信。
2.4 执行器定位执行器定位是调试的重要步骤之一。
通过控制信号发送到执行器,使执行器达到预定的位置。
调试人员可以通过观察执行器的位置反馈信号,来判断执行器的准确性。
2.5 动作测试在执行器定位之后,进行动作测试。
通过发送开闭指令,控制执行器的运行,观察阀门的开闭情况。
根据实际情况,调整参数以达到准确的阀门控制。
2.6 故障检测与排除如果在调试的过程中发现故障,应立即停止调试并进行故障检测与排除。
常见的故障包括执行器无法运行、阀门卡死等。
根据故障现象,进行逐步排除,确保系统正常运行。
3.注意事项3.1 安全注意在进行电动阀门控制系统的调试过程中,需注意电源的安全使用。
避免电源电压过高导致设备损坏或人身伤害的发生。
同时,注意阀门安装的稳固性,避免阀门脱落或松动造成安全隐患。
3.2 参数设置合理设置系统参数对于阀门的准确控制至关重要。
调试时应根据实际情况进行调整,并进行多次测试以验证参数的准确性。
3.3 故障处理在调试过程中,如果发生故障应及时停止操作,并进行故障检测与排除。
EH液压控制系统安装调试手册资料

EH液压控制系统安装调试手册新华控制工程有限公司二OO一年一月目录第一章 EH液压系统安装规程一、序言二、EH系统各部件的安装、就位三、清洗管子及各种三通、弯头、接头四、EH油管路的安装第二章 EH系统油冲洗规程一、油冲洗前的准备二、油冲洗时注意事项三、油冲洗四、油样化验第三章 EH系统调试规程一、液压部件的检查复装二、蓄能器的首次冲氮三、液压系统调试项目及要求附录:附录一、再生装置投运规程附录二、新EH油的典型特性参数附录三、冲洗材料明细表附录四、油循环冲洗记录表格第一章 EH液压系统安装规程一、序言EH液压系统的安装是一项重要的工作,安装时应仔细,不能马虎。
让石棉、焊渣、管子端面长毛刺、灰尘等进入油管路将会造成EH系统油路节流孔堵塞,液压元件卡死失灵。
特别是阀芯阀套配合间隙只有2um的伺服阀。
一旦卡死,蒸汽阀门就无法控制,机组不能正常运行。
另外安装时切实做好油管路的清洁工作,将来在油冲洗过程中可节省时间,尽快使油质颗粒度达到规定的SAE 2级或NAS 5级要求。
否则会因油质不合格不能正常启动,影响整个机组试运的进度。
在安装前应首先熟悉有关图纸资料,如 EH液压控制系统原理图、EH油管路系统、EH油管路系统布置图及有关其他安装接口图。
二、EH系统各部件的就位安装参见EH系统总图,EH系统由2只高压主汽阀执行机构、4只高压调节阀伺服机构、2只中压主汽阀执行机构、2只中压调节阀伺服机构,EH供油装置、再生装置及油管路系统、2只高压蓄能器组件、2只低压蓄能器组件、电磁阀组件和隔膜阀所组成。
安装前,应对各部件功能全面了解,并参阅系统说明书。
EH系统各伺服执行机构均随各蒸汽阀门已安装在汽门本体上,其它都需安装公司安装。
对于改造机组,阀门执行机构和弹簧操纵座需现场安装。
安装执行机构时,请参阅执行机构接口尺寸图,注意不能碰坏活塞杆、盖等,也不能将接油口的堵头拆下,以免灰尘进入,并严格确保在阀门全关状态时,油动机活塞与油缸底部保留图纸要求的缓冲区。
湖北某电梯厂电梯控制系统调试手册
湖北某电梯厂电梯控制系统调试手册1. 简介本手册旨在为湖北某电梯厂电梯控制系统的调试过程提供指导和说明。
通过本手册,调试人员将能够了解电梯控制系统的工作原理、调试步骤和注意事项,以确保系统能够正常运行。
2. 工作原理电梯控制系统利用电子元件和程序软件实现对电梯的控制和管理。
其主要组成部分包括电梯主机、乘客操作面板、电梯门控制器等。
电梯主机负责接收操作指令并控制电梯的行驶和停靠,乘客操作面板允许乘客选择楼层,门控制器负责控制电梯门的开闭动作。
系统的工作原理如下: 1. 当乘客按下相应的楼层数字,乘客操作面板将信号传送给电梯主机。
2. 电梯主机接收到信号后,对信号进行解析和处理,确定目标楼层,并发送相应的指令给电梯驱动系统。
3. 电梯驱动系统根据接收到的指令控制电梯的行驶和停靠。
4. 当电梯到达目标楼层时,电梯门控制器将接收到的指令传递给电梯门机械部分,控制电梯门的开闭动作。
3. 调试步骤步骤一:安装电梯主机和控制面板1.将电梯主机和乘客操作面板安装在电梯井内合适的位置,并连接相应的电源和通讯线路。
2.确保电梯主机和乘客操作面板与其他组件的连接正确无误。
步骤二:初始化电梯控制系统1.打开电梯主机的电源开关,确认系统正常开启。
2.初始化乘客操作面板,确保各个按钮和指示灯正常工作。
步骤三:调试电梯行驶功能1.在乘客操作面板中选择一个目标楼层,并观察电梯的行驶情况。
2.检查电梯主机是否正确接收到乘客操作面板的指令。
3.观察电梯驱动系统是否按照指令控制电梯的行驶和停靠。
步骤四:调试电梯门控制功能1.在乘客操作面板中选择一个目标楼层,观察电梯门的开闭动作。
2.检查电梯门控制器是否正确接收到电梯主机发送的指令。
3.观察电梯门机械部分是否按照指令控制电梯门的开闭动作。
4. 注意事项在进行电梯控制系统的调试过程中,调试人员需要注意以下事项:•确保所有电气连接正确无误,避免电路短路和电压过高等问题。
•在调试过程中,严禁随意更改系统参数和代码,避免对系统造成不可修复的损害。
S80、40控制系统调试说明书(V1.2).

西门子 sinumerik 801控制系统 安装调试手册

SINUMERIK 801资料结构SINUMERIK 801安装调试手册技术手册适用于控制系统SINUMERIK 8012005年11月SINUMERIK文献版本说明以下是当前版本及以前各版本的简要说明。
每个版本的状态由“附注”栏中的代码指明。
在“附注”栏中的状态码分别表示:A ... ... 新文件B ... ... 没有改动,但以新的订货号重印C ... ... 有改动,并重新发行版本订货号附注2005.11 6FC5598-1CC00-0RP0 A注册商标SIMATIC®,SIMATIC HMI®,SIMATIC NET®,SIMODRIVE ®,SINUMERIK®和SIMOTION®均为西门子公司的注册商标。
本文件中的其他名称也可能是商标,任何第三人擅自使用此商标将会侵犯注册商标所有人的权利。
标所有人的权利。
©西门子股份公司版权所有2005年没有明确的书面许可,任何人不得翻印、传播和使用本文献及其中的内容,违者将负责赔偿损失。
西门子公司享有所有版权及相关权利,包括专利权或实用新型的申请注册权。
责任免除经过审查,本文献的内容与其描述的软件和硬件相符合。
但是仍可能存在一些差异。
因此我们不能保证它们完全一致。
我们会定期审查本文献,并在下一个版本中作出必要的修改。
欢迎提出改进意见和建议。
© Siemens AG, 2005如有技术改动,恕不提前通知。
Siemens-Aktiengesellschaft. SINUMERIK 801®SINUMERIK 801I 安装调试手册 安全信息该手册中包含一些安全信息说明,在操作时必须遵照执行,以确保人身安全,保护产品和连接设备不受损坏。
在这些文字之前有三角形的警示符予以突出强调。
根据各自的危险程度不同,共有以下几种类别: 危险:表示有紧急危险。
如果不注意避免,将会导致人身伤亡或重大的财产损失。
LED显示屏灵星雨控制系统调试手册

目录第一章 701型、702型卡功能简介 (1)第二章第七代控制系统使用手册 (4)第三章国标网线制作方法 (20)IndexChapter I Model 701 and 702 functions and features (23)Chapter II Model 701 and 702 manual (25)Chapter III Communication cable making method (40)第一章 701型、702型卡功能简介一、千兆技术真正千兆技术,绝不抽帧。
单卡最大支持:701型卡1280×1024,702型卡2048×640,双卡级联最大支持2048×1152。
单网线支持:701型卡1024×640 、1280×512,702型卡1600×400、2048×320。
二、逐点校正、逐卡(箱体)校正功能逐点校正支持单点、2×2点、4×4点和8×8点四种校正模式,最大校正6144点/模块,红绿蓝各256级。
逐卡(箱体)校正用于显示屏各箱体间色差校正,红绿蓝各256级。
三、智能识别一卡通功能智能化的识别程序可识别双色、全彩、虚拟、灯饰等各种驱动板的各种扫描方式及各种信号走向,识别率达99%,一套卡在手,做屏无忧。
四、65536级(64K)灰度内任意设定功能客户可根据显示屏的情况从无灰度到65536级(64K)灰度之间任意调整,让你的显示屏达到最佳显示效果。
五、刷新率任意设置、锁相、同步功能刷新率可从10Hz-3000Hz任意设定,刷新率锁相功能使显示屏的刷新锁定在电脑显示器刷新率的整数倍上,杜绝图像撕裂,保证图像完美再现。
锁相同步范围为47Hz-76Hz。
六、双倍超大带载面积全彩4096级(4K)灰度180Hz刷新率,最大可带512×128,是第六代产品256×128的两倍,全彩静态16384级(16k)灰度300hz,可带160×64,是第六代80×64的两倍(注:需驱动板能上高时钟30MHz)。
广州广日G12调试手册
181********/16/2012编 号:SJG11-016版本号:01G12电梯控制系统调试手册编 制 潘 政校 对 李吴达标准化 黄展鹏审 定 夏嘉乐批 准 张 研广州广日电梯工业有限公司2012年 4月修改12-0285更改文件号 签字 日期 更改文件号 签字 日期1.2.2当G12控制系统增加微动平层功能时,需按下图安装隔磁板和光电开关,在平层位置时,MQG、MQ1、MQ2均插入在隔磁板的正中间。
注:SQG、MQG、XQG 光电开关插入隔磁板后是常开状态,MQ1、MQ2光电开关插入隔磁板后是常闭状态。
二、慢车、快车调试说明2.1现场调试准备2.1.1首先检查是否具备调试条件:1)用户有否按要求将电源提供到机房(正常或临时); 2)主机加油量是否合适,型号是否正确; 3)底坑缓冲器安装完成否;4)各层厅门、门锁是否安装完毕; 5)电梯接线是否已全部完成; 6)机房线槽是否已上好盖;7)井道引线的金属软管是否固定良好; 8)各层厅门门套是否已塞好;9)井道有否妨碍轿厢、对重架运行的物体; 2.1.2电气接线检查2.1.2.1机房电气接线检查 序号 检查的回路 测试点 测试标准方法1 盘车手轮开关 F8-1、F8-2正常为ON 用万用表测量测试点的阻值(ON 约为0Ω,OFF 为>0.5M Ω)2 底坑检修箱急停底坑入口箱急停F14-2、F14-3正常为ON 3 下极限限速器断绳开关 缓冲器F5-1、F5-3正常为ON 4 限速器开关 F8-3、F8-4 正常为ON 5 上极限 F6-1、F6-2 正常为ON 6 轿厢急停 F1-7、F1-8 正常为ON7 轿门锁 F1-8、F1-9 正常为ON8 厅门开关 F9-2、F9-3 所有厅门关上时为ON9限位开关上 F6-3、F6-5 打板未打到开关时开关状态为ON下F5-4、F5-5 10强迫减速开关上 SHK F6-3、F6-6SHK1F6-3、F6-7SHK2 F6-3、F6-8 下 XHK F5-4、F5-6XHK1F5-4、F5-7 XHK2 F5-4、F5-811消防开关 F9-4、F9-5 正常为OFF 12 照明AC220V F1-1、F1-3 接线正常 13 门机电源AC220V F1-4、F1-5接线正常 14 抱闸反馈开关F7-1、F7-2F7-4、F7-5抱闸合上时为ON15抱闸线圈KA-9、KA-10KA-10接抱闸线圈的正端,KA-9接抱闸线圈的负端 用万用表测量测试点的阻值2.1.2.2轿顶电气接线检查序号 检查回路 测试端子 测试标准 方法 1 主门轿门锁 D7-2、D7-3 主门轿门关上时ON 用手查线,用万用表测量2 副门轿门锁(若有) D8-2、D8-3 副门轿门关上时ON 3 安全钳开关 D5-1、D5-2 正常时ON 4 安全窗开关(若有) D6-1、D6-2 正常时ON5门区感应器装置 D9-1、D9-2、D9-3 用手查线微动平层装置(若有) D9-4、D9-5、D9-6D、9-7 用手查线6 主门安全触板开关 左 DL-14、DL-4常闭右 DL-4、DL-57 副门安全触板开关 (若有) 左DL-14、DL-7 常闭右 DL-7、DL-88 主门光电开关(若有) DL-15、DL-10、DL-5、DL-6用手查线 9 副门光电开关(若有) DL-15、DL-10、DL-8、DL-9用手查线 10 轿厢照明 D4-1、D4-2 至LED 灯 11 停电应急照明 D4-3、D4-4 至停电应急照明灯 12 轿厢风扇 D3-1、D3-2 至风扇 13 主门门机电缆 D1 用手查线 14 副门门机电缆 D2 用手查线 15 主门光幕 D12、D13 用手查线 16 副门光幕 D14、D15 用手查线 2.1.2.3轿厢通信板接线检查在安装小组确认插接电缆C1、C2、C3、C4、C5连接正确,用万用表在轿顶对各控制总线的接线进行测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文件编号:GP-B06-C02
版本号:V1.0
编号:GP-E-T-CS-2007HD-001
受控状态:受控
调试手册
《1.5MW双馈风力发电机组控制系统》
编制部门:电气控制系统事业部技术部
编制人:董健编制日期:
审核人:审核日期:
批准人:批准日期:
国电联合动力技术有限公司
目录
一、测试目的 (3)
二、测试条件 (3)
三、测试方法和步骤 (3)
1、系统上电 (3)
2、软硬件连接与程序下装 (6)
3、静态信号状态检查 (9)
4、动态信号状态检查 (10)
5、模拟量信号状态检查 (15)
一、测试目的
1.5MW双馈风力发电机组的控制系统采用Beckhoff公司的嵌入式PC为核心控制器件,采集的传感器信号包括风速、风向、温度等模拟信号以及重要开关量信号,它们分别由各自的传感器通过不同的通道输入给控制器,控制器经过内部控制算法输出控制指令,通过执行机构达到控制目的。
为了保证整个控制系统的准确工作,必须进行通电测试。
通电测试可以验证1.5MW风机传感器是否正常工作以及信号输入输出的正确性,是下一步整机调试的基础工作。
调试人员应该严格遵守本说明书的指导规范。
二、测试条件
塔底柜和控制柜以及系统接线正确
PC机一台,内装Beckhoff公司的TwinCAT软件
网线一根
万用表
三、测试方法和步骤
1、系统上电
确认系统接线正确,塔筒柜与机舱柜通讯光缆连接无误。
上电顺序是先塔筒柜,后机舱柜,具体顺序如下表所示:
塔筒柜:
机舱柜:
233Q3 由233F3控制0
2、软硬件连接与程序下装
打开PC机,确认PC已与嵌入式PC通过网络互连或直连,打开TwinCAT 软件的system manager,进入如下界面
点击Choose Target,进入如下界面
点击Search,进入如下界面
点击Broadcast Search,选中要连接的嵌入式PC,点击Add Route,输入用户名和密码,点击ok确定,注意system manager右下角出现如下字符:
打开系统配置文件,配置文件为*.tsm。
依次点击generate mappings, check configuration, activate configuration, reset twincat to run mode
打开TwinCAT PLC control,打开软件源文件,点击project下拉菜单中的rebuild all,点击online下拉菜单中的login,完成软件下装。
创建引导启动项目(最后完成测试后再做)点击online下拉菜单中的create boot project
打开system manager,完成如下配置:
到此,嵌入式PC可以启动后自动运行程序。
3、静态信号状态检查
下装程序但不运行,在系统正确连线并上电的基础上,检查所有IO模块通道状态是否符合下表所示:(此时DO模块应全为0)
IO模块编号通道1 通道2 通道3 通道4 检查合格塔底柜ID11:4个KL1104;3个KL2134;1个KL1904;1个KL3204;1个KL3403 103DI1 1 0 0 1
103DI2 0 0 1 0
103DI3 0 0 1 1
103DI4 1 1 1 0
104DI5 通X 通通
机舱柜ID20:17个KL1104;10个KL2134;2个KL1904;1个KL2904 401DI1 1 1 1 1
401DI2 1 1 1 1
401DI4 1 1 1 1
401DI5 1 0 1 0
4、动态信号状态检查
下装程序并运行,本步骤的目的在于检验输出回路、执行机构是否正常工作。
可以通过在TwinCAT软件中对PLC中各输出点人为置1或清0,观察PLC 相应输出点的LED灯是否发生相应变化,并查看该输出通道的控制对象是否按照预定的方式动作或发生状态改变。
如果测试结果跟预期相同,则证明该信号通过了测试。
测试过程中应注意安全,每测试一个点后都应该相应的控制点及时复位,然后才可以继续去测试下一个点,这样可以避免在后面的操作过程中出现误操作等问题。
第11页共16页
第12页共16页
第13页共16页
第14页共16页
5、模拟量信号状态检查
前面对数字量输入和数字量输出通道都进行了检查,最后对模拟量输入通道进行检查。