伺服电子齿轮计算
伺服电机电子齿轮比的算法

伺服电机电子齿轮比的算法The final edition was revised on December 14th, 2020.伺服电机电子齿轮比的算法一般来说主要由三大因素组成:1、要知道电机转一圈雕刻机的X/Y/Z走多少距离;2、上位机脉冲当量的单位:“毫米/脉冲”还是“脉冲/毫米”;3、伺服电机电子齿轮比的分子与分母。
而分子的基数一般是固定的,只需输入此值就行,而常见的国内分体的伺服电机,它的分子的值与编码器精度有关,精度说法不外乎有两种:一、讲多少线的,比如常见的为2500线,那么它的分子的值为2500的四倍,即10000,如我司分体的就是这样算的。
二、讲多少位,位是指2的幂次方,比如安川的17位、20位就是2的17或20次方。
第1个:要知道电机转一圈雕刻机的X/Y/Z走多少距离1、丝杆机:这个简单,只要知道丝杆的导程(现场一般叫螺距,但书面上来说两者的是不一样的概念。
我们可从它们的相同点来说只要是单头螺纹的丝杆这两者的说法就无区别),然后知道传动比(这又分为减速的传动比还是加速的传动比),然后按以下算法:电机转一圈距离=导程X传动比注:减速传动比一般分子比分母小,如1/3、1/5等等,加速传动比般为分子比分母大,如3/1、5/1等等。
2、齿轮齿条机;按以下算法:电机转一圈距离=齿轮模数X齿轮齿数传动第2个:“毫米/脉冲”与“脉冲/毫米”转换关系如下:“毫米/脉冲”转“脉冲/毫米”:脉冲/毫米=1 /输入的“毫米/脉冲”数值,比如输入值为,那么就等于100脉冲/毫米。
“脉冲/毫米”转“毫米/脉冲”:毫米/脉冲=1 //输入的“脉冲/毫米”数值,比如输入值为100,那么就等于毫米/脉冲第3个:电子齿轮比的分母或脉冲当量(单位为毫米/脉冲)的算法电子齿轮比的分母=电机转一圈距离/脉冲当量从这个算法公式可看出,电子齿轮比的分母或脉冲当量这两者必须有一个是人为任意设置一个数值(只要不超过说明书的许可范围,一般电子齿轮比的分母不超过分子,脉冲当量不超过),另一个才可能求出。
伺服电机电子齿轮比计算公式

速度<mm/s>
2000 200000 2042.553191
OK OK
2000
2447.916667
伺服电机电子齿轮比计算公式
直径<mm> 圆周长计算<mm>
周长取整数 比率结果校验
OK 400 235 CMX计算公式 CDV计算公式
最大速mm/min 最大速mm/min
依输出脉冲最大和电 机额定转速计算出的
电子齿轮比
CMX CDV 比率
200000 416666.6667
0.48
由此计算出的脉冲当量<mm/p>
0.012239583
服电机电子齿轮比计算公式
75 235.619449
235
*圆周长计算及取整数公式,输入直径,计算周长、取整数;
*下面部分自动对电子齿轮比约分(因为电子齿轮比分子、分母输入最大数不能超过编码 器分辨率),所以要约分后输入驱动器,公式做的还不完整,有时需人工干预一下!
*根据输入的位移速度计算出PLC输出脉冲频率及当前电机转速;
120000 146875
最大速 m/min
最大速 m/min
120 146.875
电机速度 r/min
2000
*根据最大输出脉冲频率和电机最大转速计算出脉冲当量,可使输出脉冲和电机转速同时 达到最大值,但使用设定时还是将每mm脉冲数调整为整数为宜,便于程序计算输出脉冲 时都是整数,不会造成累积误差;
奇数
1
1
1
1
1
奇数
1
1
1
1
1
=编码器分辨率<p/r>*设定脉冲当量<mm/p>*10^3*减速比分母/减速比分子
伺服控制中电子齿轮比

伺服控制中电子齿轮比是什么伺服系统的精度由编码器的线数决定,而通过电子齿轮设定可以使指令脉冲设为任意值.怎么理解??答:伺服系统的精度是编码启的线数决定,这个不假,但这个仅仅是伺服电机的精度在实际运用中,连接不同的机械结构,如滚珠丝杠,蜗轮蜗杆副,螺距、齿数等参数不同,移动最小单位量所需的电机转动量是不同的电子齿轮比是匹配电机脉冲数与机械最小移动量的举个例子:车床用10mm丝杠,那么电机转一圈机械移动10mm,每移动0.001mm就需要电机旋转1/10000圈而如果连接5mm丝杠,且直径编程的话,每0.001的移动量就需要1/5000转这个是电子齿轮的作用。
电子齿轮设置的是驱动给电机的,编码器精度是电机反馈给驱动的。
假如电子齿轮比设为3,上位控制器发出100个脉冲,经过伺服驱动器后实际发给伺服电机的脉冲数应该为100*3=300个脉冲.同样,上位控制器发出的脉冲速度和脉冲加速度都要乘以这个比例电子齿轮功能是指可将相当于指令控制器输入指令1脉冲的工件移动量设定为任意值的功能,分为电子齿轮(分子)Pn 202、电子齿轮(分母)Pn 203两部分参数。
在无减速比条件下设定时,根据当前电机的编码器规格把相对应的编码器脉冲数13位:2048P/R 16位:16384P/R 17位:32768P/R乘以分频比4后,写入Pn 202。
将负载轴旋转一圈的脉冲数写入Pn 203。
例如:电机的编码器规格为16位时,把16384*4=65535写入电子齿轮(分子)Pn 202想要36000个脉冲转一圈的话,在电子齿轮(分母)Pn 203中写入36000 注:Pn 202/ Pn 203的值必须在[0。
01,100],并且当Pn 202或Pn 203内的值超过65535后,请进行约分。
电子齿轮就电机编码器反馈脉冲与指令脉冲的一个比值简单实用地介绍伺服电子齿轮比的计算方法电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子齿轮设置方面的2个小例子,供大家参考下.例子1:已知伺服马达的编码器的分辨率是131072 P/R,额定转速为3000r/min,上位机发送脉冲的能力为200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少?来源于:528工控网http://www。
伺服电子齿轮比的计算方法

伺服电子齿轮比的计算方法电子齿轮比主要功能:1、可以任意地设置每单位指令脉冲对应的电机的速度和位移量(脉冲当量);2、当上位控制器的脉冲发生能力(最高输出频率)不足以获得所需速度时,可以通过电子齿轮功能(指令脉冲倍频)来对指令脉冲进行×N倍频。
当伺服电机用在电脑绣花机的框架上时,控制上的要求为主控发送1个脉冲框架得移动0.1mm。
对电子齿轮比的计算有影响的主要为以下几个因素:电机编码器的分辨率;机械装置的二级传动比;框架皮带齿轮大小。
电机编码器的分辨率:伺服电机的编码器一般为2000线或者是2500线,也就是转一圈能产生2000或者2500个脉冲,而伺服驱动器对此脉冲进行4倍频处理,所以电机转一圈就能产生8000或者10000个脉冲,也就是分辨率为8000或者10000。
电机型号编码器线数电机编码器的分辨率三洋P2、P5电机20008000大豪伺服250010000以三洋伺服电机为例:当控制器给驱动器发送一个脉冲时,伺服电机转过的角度为经过二级传动装置后,框架运动的角度折算到电机上角度和二级传动比是成反比的,比如二级传动比为1/4,那么电机转过的角度就是传动轴转过的4倍。
框架齿轮大小:目前市场上主要有两种齿轮:绣框移动0.1mm时所需转过的角度为0.36°和0.45°。
大部分机器都是采用0.36°的齿轮。
综上所述可以得知电子齿轮比的公式如下采用丝杆结构的话,电子齿轮比的计算方式稍微有些不同因为一般的,电机和丝杆轴之间是1:1的皮带传动,丝杆的螺距为M毫米/圈,那么计算公式为框架伺服电机“电子齿轮比”的计算方法电子齿轮比主要功能:1、可以任意地设置每单位指令脉冲对应的电机的速度和位移量(脉冲当量);2、当上位控制器的脉冲发生能力(最高输出频率)不足以获得所需速度时,可以通过电子齿轮功能(指令脉冲倍频)来对指令脉冲进行×N倍频。
当伺服电机用在电脑绣花机的框架上时,控制上的要求为主控发送1个脉冲框架得移动0.1mm。
伺服电机电子齿轮比的算法

伺服电机电子齿轮比的算法
1.齿轮比计算:
1.1确定速度要求:
通过分析系统要求,确定所需的速度范围和精度。
可以考虑最大速度、最小速度、加速度和减速度等。
1.2确定实际系统参数:
确定伺服电机的最大速度和最大加速度。
这些参数通常可以从电机的
技术规格中获得。
1.3计算电子齿轮比:
通过将速度要求和实际系统参数进行比较,可以计算出电子齿轮比。
一种常见的方法是使用比例关系,例如:
电子齿轮比=(速度要求/实际系统参数)*缩放系数
缩放系数是一个因素,用于根据具体应用的需求进行调整。
例如,如
果需要更高的精度,则可以降低缩放系数。
2.控制器实现:
2.1设计控制器:
根据具体的应用需求,选择适当的控制器类型,例如PID控制器。
根
据传感器反馈和电机输出的误差,调整控制器参数以实现所需的控制性能。
2.2实现控制算法:
将电子齿轮比应用到控制算法中,以实现所需的速度控制。
例如,如果输入速度是1000rpm,而电子齿轮比是2,则输出到伺服电机的速度应是2000rpm。
2.3评估和调整:
实施控制算法后,通过实际测试和分析系统响应,评估控制性能并进行必要的调整。
这可能涉及到调整电子齿轮比、控制器参数或其他系统参数。
以上是一个基本的伺服电机电子齿轮比算法的框架。
具体的实现细节会因应用的不同而有所差异。
为了实现更高的精度和性能,可能需要考虑更复杂的算法和控制器设计。
三菱伺服电子齿轮比算法
三菱伺服电子齿轮比算法内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.三菱MR-J2S 伺服放大器电子齿轮比电子齿轮比的分子是电机编码器分辨率(反馈脉冲)CMX,分母是电机旋转一圈所需要的脉冲数(指令脉冲)CDV。
电子齿轮比就是电机编码器反馈脉冲与指令脉冲的一个比值。
电子齿轮比是通过更改电子齿轮比的分倍频,来实现不同的脉冲当量。
举例公式计算解析:已知伺服电机编码器分辨率是131072,额定转速为3000R/MIN,上位机发出脉冲能力为200Kp/S,那么电子齿轮设置为多少?如果不设置电子齿轮比,用默认值,速度是:200×1000×60 ∕131072 = 91.55 r/min200×1000×(CMX/CDV)= (3000∕60)×131072 ,CMX/CDV = 4096 /125200×1000×60:题中上位机发送脉冲的能力为200Kpuise(脉冲)/s ,所以每秒发出脉冲数是200×1000,60是一分钟60s 。
一分钟上位机发送200×1000×60个脉冲。
131072 p/r:三菱MR-J2S伺服放大器编码器的分辨率。
也就是说三菱MR-J2S伺服电机接受到131072个脉冲转一圈。
200×1000×60 ∕131072 = 91.55 r/min :上位机每分钟发出的脉冲除以三菱MR-J2S伺服放大器编码器的分辨率等于伺服电机每分钟的旋转圈数(速度)。
200×1000×(CMX/CDV)= (3000∕60)×1310723000 ∕60 :伺服电机的额定转速是3000 r / min ,每秒的转速则:(3000∕60)r / s ,因为上位机发出的脉冲是200X1000 puise / s ,所以计算时都要用相同的计量单位。
伺服电机电子齿轮比计算公式

伺服电机电子齿轮比计算公式
伺服电机电子齿轮比计算公式是用来计算伺服电机的电子齿轮比,也称为“系数”。
电子齿轮比也被称作“减速比”,是伺服电
机的重要参数,可以定义伺服电机传动系统的功率和运动性能。
电子齿轮比是一个重要的特性,它可以确定转子转速和输出轴转速之间的比例。
电子齿轮比计算公式可以表示为R = N1/N2,其中R表示伺服
电机的电子齿轮比,N1表示伺服电机的自转速度,N2表示伺
服电机的输出轴速度。
本公式可以用来计算比较简单的伺服电机的电子齿轮比,也可以用来计算复杂的伺服电机的电子齿轮比。
在实际的应用中,在计算伺服电机的电子齿轮比时,多以电流和转矩为准则,以电流作为参考参数,以转矩来衡量电机的输出能力及传动系统的效率。
要算出电子齿轮比,首先定义好电机要输出的转矩(T), 要求驱动轴转速(N2)和电机电压(V),然后根据关系T=KVnN2可以求出电机的自转速度
(N1),最后可以得出电子齿轮比 R = N1 / N2。
伺服电机的电子齿轮比的计算公式是由电流、功率和转速,三个参数之间的关系推导而来的,是对电机及其传动系统进行参数设计的重要工具。
它在伺服电机的设计中具有重要的意义,可以确定伺服电机的转矩、电流、起动等行为,为提高伺服电机的工作效率和性能作出重要贡献。
电子齿轮比计算公式

电子齿轮比计算公式:已知编码器分辨率131072,脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
代入以下公式:马达转速(3000rpm)/60=脉冲频率(200000Hz)*(分子/分母)/伺服分辨率(131072)约分下来电子齿轮分子4096,电子齿轮分母125。
这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM的转速。
将伺服马达编码器的分辨率设为分子,马达转一圈所需的脉冲数设为分母。
如果再装减速器的话,PLC原来所发脉冲数再乘以减比。
举个例子:伺服马达编码器的分辨率131072,我设计为PLC每发一个脉冲伺服马达转0.5度,那么伺服马达转一圈(360。
)需要720个脉冲。
电子齿轮就设为131072/720化简分数后为8192/45这样PLC 每次发720个脉冲伺服马达转一圈。
如果还想接个减速器,举个例子接个减比为5比1的减速器时,原来电子齿轮所设分数不变,PLC原来所发脉冲数再乘以5(720*5=3600),即现在伺服马达转一圈PLC发3600个脉冲就可以了。
简单的说,比如说电子齿轮比是1(系统默认),脉冲当量是1mm(就是物体在你发1个脉冲时运行的距离,注意是控制脉冲,就是你PLC发给伺服放大器的脉冲),当你把电子齿轮比改为2时,对应的脉冲当量就变成2mm。
可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
伺服电机旋转时,速度表现重于精度表现时候,希望将电机速度性能完全表现出来;而对于旋转分辨率要求较低的时。
已知编码器分辨率131072脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
电子齿轮比计算公式

电子齿轮比计算公式齿轮比:齿轮比,两个直径不同的齿轮啮合在一起转动,直径大的齿轮转速自然会比直径小的齿轮转慢一些,它们的转速比例其实和齿轮直径大小成反比,汽车内发动机的转速经过变速器内的齿轮组改变转速后才输往车轮,变速箱内就是有几组不同齿轮比的齿轮让驾驶人选择,以配合车速及负荷,开车时转档就是选择不同齿轮比的组合。
电子齿轮比计算公式:已知编码器分辨率131072,脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
代入以下公式:马达转速(3000rpm)/60=脉冲频率(200000Hz)*(分子/分母)/伺服分辨率(131072)约分下来电子齿轮分子4096,电子齿轮分母125。
这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM的转速。
将伺服马达编码器的分辨率设为分子,马达转一圈所需的脉冲数设为分母。
如果再装减速器的话,PLC原来所发脉冲数再乘以减比。
举个例子:伺服马达编码器的分辨率131072,我设计为PLC每发一个脉冲伺服马达转0.5度,那么伺服马达转一圈(360。
)需要720个脉冲。
电子齿轮就设为131072/720化简分数后为8192/45这样PLC 每次发720个脉冲伺服马达转一圈。
如果还想接个减速器,举个例子接个减比为5比1的减速器时,原来电子齿轮所设分数不变,PLC原来所发脉冲数再乘以5 (720*5=3600),即现在伺服马达转一圈PLC发3600个脉冲就可以了。
简单的说,比如说电子齿轮比是1(系统默认),脉冲当量是1mm(就是物体在你发1个脉冲时运行的距离,注意是控制脉冲,就是你PLC发给伺服放大器的脉冲),当你把电子齿轮比改为2时,对应的脉冲当量就变成2mm。
可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
伺服电子齿轮比的计算方法

伺服电子齿轮比的计算方法电子齿轮比主要功能:1、可以任意地设置每单位指令脉冲对应的电机的速度和位移量(脉冲当量);2、当上位控制器的脉冲发生能力(最高输出频率)不足以获得所需速度时,可以通过电子齿轮功能(指令脉冲倍频)来对指令脉冲进行×N倍频。
当伺服电机用在电脑绣花机的框架上时,控制上的要求为主控发送1个脉冲框架得移动0.1mm。
对电子齿轮比的计算有影响的主要为以下几个因素:电机编码器的分辨率;机械装置的二级传动比;框架皮带齿轮大小。
电机编码器的分辨率:伺服电机的编码器一般为2000线或者是2500线,也就是转一圈能产生2000或者2500个脉冲,而伺服驱动器对此脉冲进行4倍频处理,所以电机转一圈就能产生8000或者10000个脉冲,也就是分辨率为8000或者10000。
电机型号编码器线数电机编码器的分辨率三洋P2、P5电机20008000大豪伺服250010000以三洋伺服电机为例:当控制器给驱动器发送一个脉冲时,伺服电机转过的角度为经过二级传动装置后,框架运动的角度折算到电机上角度和二级传动比是成反比的,比如二级传动比为1/4,那么电机转过的角度就是传动轴转过的4倍。
框架齿轮大小:目前市场上主要有两种齿轮:绣框移动0.1mm时所需转过的角度为0.36°和0.45°。
大部分机器都是采用0.36°的齿轮。
综上所述可以得知电子齿轮比的公式如下采用丝杆结构的话,电子齿轮比的计算方式稍微有些不同因为一般的,电机和丝杆轴之间是1:1的皮带传动,丝杆的螺距为M毫米/圈,那么计算公式为框架伺服电机“电子齿轮比”的计算方法电子齿轮比主要功能:1、可以任意地设置每单位指令脉冲对应的电机的速度和位移量(脉冲当量);2、当上位控制器的脉冲发生能力(最高输出频率)不足以获得所需速度时,可以通过电子齿轮功能(指令脉冲倍频)来对指令脉冲进行×N倍频。
当伺服电机用在电脑绣花机的框架上时,控制上的要求为主控发送1个脉冲框架得移动0.1mm。
伺服驱动器电子齿轮比计算公式推导

伺服驱动器电子齿轮比计算公式推导一、按伺服电机额定转速的电子齿轮比公式推导过程一般在用的PLC的最高脉冲频率是100KHZ,即100000(脉冲数/秒),假设伺服电机的额定转速是2000(转/分钟),即2000/60=33.33(转/秒),伺服电机编码器是13bit,即分辨率为2^13=131072(脉冲数/转)。
那么在电子齿轮比1:1的情况下,PLC能让伺服电机旋转的最大转速是多少呢?通过单位的换算,我们要得到:转/秒,这个单位(思想重点),那么我们可以将脉冲数/秒÷脉冲数/转,就能得到单位:转/秒。
这里大家可以在纸上换算下就能得出。
那么我们就可以用最高脉冲频率÷伺服电机编码器分辨率,也就是100000÷131072=0.763(转/秒),也就是说,在电子齿轮比1:1的情况下,伺服电机所能达到的最大转速是0.763×60=45.78(转/分)。
这个数值显然低于伺服电机的额定转速2000(转/分)。
因此,我们需要将伺服驱动器每秒接收到的脉冲数提高2000÷45.78=43.687倍才能发挥伺服电机能力。
而伺服驱动器的电子齿轮比就是将PLC发出的脉冲数成倍数放大后,再来驱动伺服电机,从而提高伺服电机的转速。
所以,这里的电子齿轮比就要设成43687:1。
但是我们这样的话,就会出现误差。
我们在计算过程中,不要除尽,要带分数去计算。
整个过程是:100000÷131072×(分子÷分母)=2000÷6,得到分子:分母=16384:375。
把驱动器的分子参数设为16384,分母参数设置为375,这样就能达到2000(转/分)的目的了。
总结:分子÷分母=(转速÷60)×(编码器分辨率÷PLC最高脉冲频率)二、传动比我们实际项目中,由于伺服电机本身的转矩限制,或者出于成本考虑,一般会给伺服电机配个减速机,或者在为了提高/降低终端速度,就会配套大小齿轮。
伺服电子齿轮计算

3)工件的移动速度=螺距×丝杆的转速×1/60
= 10mm×585.9r/min×1/60s
= 97.65mm/s
5、脉冲当量
脉冲当量=工件的移动速度/上位机额定频率
=97.65/(200×1000)
6)上位机工作频率=2048/2=1.024 KHz
7)运行时间 1800mm÷(1/3)mm/s =5400s,运行时间大于5400s
8)指令脉冲单位1/(1024×3)(mm)
9)定位精度 0.01mm
丝杆控制精度=0.01mm÷10/3mm=0.003周
电机控制精度= 0.003周×5=0.015周
7)定位精度 0.01mm
解
1)电子齿轮比=1048576/65536=16;
2)丝杆转一周的时间=絲桿螺距 10/3mm÷線速度(1/3)mm/s=10s
3)电机转一周的时间=10s÷5=2s ,要求电机转速=0.5r/s
4)上位机工作频率= 0.5r/s×65536=32.768khz
求:
1、如果电子齿轮比是1,伺服电机的转速?
2、伺服电机的额定转速时,编码器反馈脉冲数=?
3、电子齿轮比?
4、上位机额定频率工作时,工件的移动速度=?
5、脉冲当量=?
6、工件移动准确到0.01mm
解:
1、如果电子齿轮比是1:
1)编码器输出检测反馈脉冲131072;
2)電機用三菱 20位 ,编码器解析度=131072×8=1048576;
3)最高線速度 20m/min , (1/3)mm/s
4)絲桿螺距 10/3mm
5)減速比 5
6)行程 1.8m
电子齿轮比的计算方法

脉冲当量与电子齿轮比的计算例1:控制器输出脉冲数为P ,丝杆螺矩为D ,编码器分辨率为P m ,求该伺服系统的脉冲当量δ。
设工作台行程为d ,丝杆在输入脉冲数p 时转动N s ,圈,则有d=D . N s :设电机圈数为N ,如图:N=N S ,而电机圈数为N=P/P m. 将上式分别代入下式,有:在例2:机械减速器的减速比为K :1,当电机转K 圈时,丝杆才转1圈:N S =工作台圈数 N =电机圈数 K =比例倍数 N S =N/K例3:控制圆盘转动的伺服定位系统,这时其所移动的是转动角度,脉冲当量为控制器每发出一个脉冲为圆盘转动角度值。
例4:驱动输送带或线材前进的伺服定位系统,这时其移动量为输送带或线材移动的距离;D=直径例5:齿轮传动机构,设齿轮的模数为m,齿数为z,这时齿条的位移d跟齿轮的分度圆有关,据机械常识有齿轮的分度圆直径为mz,则其分度圆周长为πmz:步进系统:步进电机通过丝杆带动工作台移动,设步进电机的步距θ,步进驱动的细分数为m,丝杆的螺距为D:角为则有步进电机一圈所要脉冲数P为:其脉冲当量δ为:电子齿轮:例:丝杆螺距D=10mm,编码器分辨率P m=4096,要求系统的脉冲当量δ=1mm/pls,试设置齿轮比:1mm=1000μmδ:先求固有的脉冲当量0再由系统脉冲当量δ求电子齿轮比:电子齿轮比设置:CMX=4096CDV=10000电子齿轮对电机转速调节作用例:电机额定转速为3000r/min,PLC最大输出频率为100KHZ,编码器分辨率P m=4096,如希望电机在额定转速下工作,则设定电子齿轮比:先求固有转速N m:再求设电子齿轮比:电机最大转速的核算:例:电机额定转速为n N=2000r/min,PLC最大输出频率为100KHZ,减速比为K=4,螺距D=10mm,编码器分辨率P m=8192,要求脉冲当量为1μm/pls,试设电子比:先求固有脉冲当量:代入电子齿轮公式:电子齿轮比设置:CMX=32768CDV=10000对电机最大转速进行核算:应用中最高输出脉冲频率fm为:。
小白伺服电子齿轮比计算方法

小白伺服电子齿轮比计算方法齿轮传动是机械传动中常用的一种方式,通过两个或多个相互啮合的齿轮,将动力和运动传递给其他机构,从而达到改变转速、扭矩和转向的目的。
在伺服系统中,齿轮传动是非常常见的一种传动方式,可以实现高速高精度运动。
伺服电机齿轮传动是指在伺服系统中,将电机的输出轴与执行机构连接,通过齿轮传动实现能量的传递和力量的放大。
在伺服电机齿轮传动中,一个关键的参数是齿轮比。
齿轮比是指两个齿轮之间的齿轮齿数的比值,通常表示为N1/N2,其中N1是传动齿轮的齿数,N2是被传动齿轮的齿数。
齿轮比可以决定输出齿轮的转速、扭矩和转向与输入齿轮的关系。
在计算伺服电机齿轮比时,首先需要明确两个关键参数:需要输出的转速和需要输出的扭矩。
对于转速的计算,可以通过下面的公式计算:输出转速=输入转速÷齿轮比其中,输入转速是伺服电机的转速,齿轮比是齿轮的压力角和啮合角的函数,可以通过齿轮参数手册或者设计手册查找到。
对于扭矩的计算,可以通过下面的公式计算:输出扭矩=齿轮比×输入扭矩其中,输入扭矩是伺服电机的扭矩。
通过以上两个公式,就可以轻松计算出伺服电机齿轮比。
此外,还需要注意一些其他因素。
首先,齿轮副的啮合是通过齿轮的齿数确定的,因此在选择齿轮比的时候需要注意齿轮的齿数以及模数等参数。
其次,选用适当的材料和齿轮传动方式(如齿轮、齿条、蜗杆等),以确保伺服系统的可靠性和耐久性。
通常情况下,伺服电机齿轮比的选择是一个工程问题,需要综合考虑多个因素,比如输出的机械特性、系统的要求、成本等等。
有时也会采用多级齿轮传动来实现更大的齿轮比。
总结起来,小白伺服电子齿轮比计算方法主要包括确定输入转速和输入扭矩,使用相应的公式进行计算,同时注意选择适当的齿轮和材料。
齿轮比是伺服电机齿轮传动系统中的一个重要参数,对于系统的性能和运行效果有着关键影响。
因此,合理选择齿轮比是伺服电机设计的关键一步。
伺服电机电子齿轮比计算公式

伺服电机电子齿轮比计算公式
电子齿轮系统是指将电机和齿轮结合在一起,允许电机快速响应驱动任务所需的机械惯性。
电子齿轮系统具有轻质化和去除机械运动特性的优势,可以实现可靠的高效率运行。
比率的计算是电子齿轮比的关键因素,用于确定动力传输系统的相对运行比率。
求电子齿轮比的公式为:
i=m2n2/m1n1
其中m1和n1指定原始电机和转轮转速,m2和n2指定输出转轮转速和电机转速,i指定电子齿轮比。
可以看出,电子齿轮比的公式可以用来计算电机的最佳输出转速,以优化振动干扰和最优运行性能。
电子齿轮比也可以用于提供恒定的机械扭矩,可以改善精密的转矩控制性能。
这是因为电子齿轮比可以控制输出转轮转速,从而获得较高的转矩和更好的功率效率。
此外,正确计算电子齿轮比还有助于更精确地计算齿轮系统的传动比,有助于改善运动原理图的准确性。
总之,电子齿轮比对于实现高效有效的电机驱动及其应用效能有着至关重要的作用。
通过有效计算电子齿轮比,可以使电机运行更加精确,使控制更加准确和安全,从而有效的提升系统的性能和运行可靠性。
伺服电机脉冲当量或电子齿轮的调整方法

电子齿轮的调整方法1 什么是脉冲当量或电子齿轮脉冲当量是数控系统控制精度的关键参数,每个脉冲信号机床运动部件的位移量称为脉冲当量,与电子齿轮的关系为:电子齿轮分子/分母比----脉冲当量X 1000,单位:毫米。
例:系统脉冲当量是0.008 毫米,其电子齿轮分子/分母 = 8/1 。
2 什么时候要调整脉冲当量或电子齿轮a机床安装调试或更换系统;b更换电子盘(DOM);c机床运行过程中加工精度不够;d进行参数初始化以后。
3 如何调整调整脉冲当量或电子齿轮电子齿轮比 = 丝杠螺距×1000/(360×细分数/步距角×传动比)。
为便于生产现场调整,可用如下简单方式进行调整:a 先粗设一个电子齿轮比,在系统主界面按参数设置,进入后选择机床参数,将电子齿轮值设为 8:1,按存储(无存储按钮的按 F1)b 在系统主界面下按 F1,进入自动方式,选择F8手动辅助,选择点动,输入点动增量1000c 在机床轨道上做好当前所在位置的标记,然后按下箭头,让机床向远离标志的方向行走一个点动增量;d 测量轨道上的实际行走距离;e 带入下面公式计算分子/分母=8×[测量值]/1×1000将上式化简成最简分数即可。
例:初设电子齿轮比,例:8:1,点动1000毫米,实际走650毫米分子/分母=8×650/1×1000=26/电子齿轮比与脉冲当量相关计算1、什么是机械减速比(m/n)答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。
在数控机床上为电机轴转速与丝杠转速之比。
2、什么是电子齿轮比答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。
如分子大于分母就是放大,如分子小于分母就是缩小。
例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。
电子齿轮之概念及伺服马达转一圈所需之pulse计算
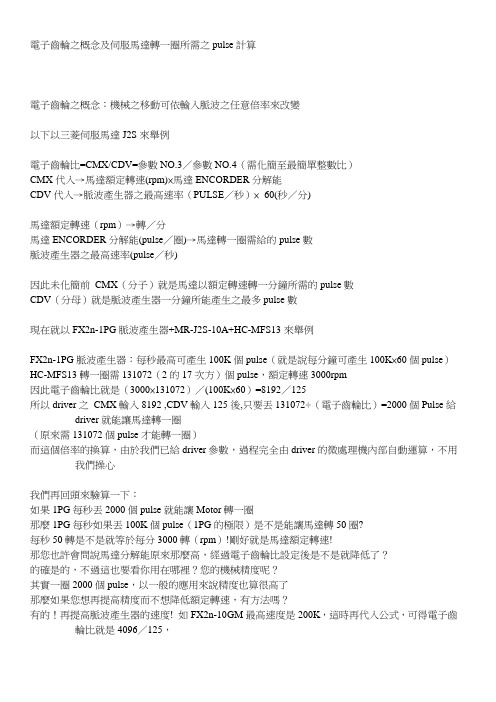
電子齒輪之概念及伺服馬達轉一圈所需之pulse計算電子齒輪之概念:機械之移動可依輸入脈波之任意倍率來改變以下以三菱伺服馬達J2S來舉例電子齒輪比=CMX/CDV=參數NO.3/參數NO.4(需化簡至最簡單整數比)CMX代入→馬達額定轉速(rpm)×馬達ENCORDER分解能CDV代入→脈波產生器之最高速率(PULSE/秒)×60(秒/分)馬達額定轉速(rpm)→轉/分馬達ENCORDER分解能(pulse/圈)→馬達轉一圈需給的pulse數脈波產生器之最高速率(pulse/秒)因此未化簡前CMX(分子)就是馬達以額定轉速轉一分鐘所需的pulse數CDV(分母)就是脈波產生器一分鐘所能產生之最多pulse數現在就以FX2n-1PG脈波產生器+MR-J2S-10A+HC-MFS13來舉例FX2n-1PG脈波產生器:每秒最高可產生100K個pulse(就是說每分鐘可產生100K×60個pulse)HC-MFS13轉一圈需131072(2的17次方)個pulse,額定轉速3000rpm因此電子齒輪比就是(3000×131072)/(100K×60)=8192/125所以driver之CMX輸入8192 ,CDV輸入125後,只要丟131072÷(電子齒輪比)=2000個Pulse給driver就能讓馬達轉一圈(原來需131072個pulse才能轉一圈)而這個倍率的換算,由於我們已給driver參數,過程完全由driver的微處理機內部自動運算,不用我們操心我們再回頭來驗算一下:如果1PG每秒丟2000個pulse就能讓Motor轉一圈那麼1PG每秒如果丟100K個pulse(1PG的極限)是不是能讓馬達轉50圈?每秒50轉是不是就等於每分3000轉(rpm)!剛好就是馬達額定轉速!那您也許會問說馬達分解能原來那麼高,經過電子齒輪比設定後是不是就降低了?的確是的,不過這也要看你用在哪裡?您的機械精度呢?其實一圈2000個pulse,以一般的應用來說精度也算很高了那麼如果您想再提高精度而不想降低額定轉速,有方法嗎?有的!再提高脈波產生器的速度! 如FX2n-10GM最高速度是200K,這時再代入公式,可得電子齒輪比就是4096/125,現在要讓馬達轉一圈需要從脈波產生器丟出4000個pulse,額定轉速依然不變是3000rpm 要再提高精度嗎?可以!還有500K的脈波產生器,甚至有更高的!只是這時,脈波產生器的預算,就不是很友善了!伺服馬達驅動器每輸出1 PULS 時,其移動之距離計算引用:(a)皮帶輪齒數比為2:1,即馬達旋轉2圈時,導螺桿只轉動1圈。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服电子齿轮计算
编码器分辨率F 脉冲当量p 螺距d机械速比(从动齿轮齿数)m机械数比(主动齿轮齿数)n 100000.001360101
1、 什么是机械减速比(m/n)
答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。
在数控与丝杠转速之比。
2、什么是电子齿轮比
答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。
放大,如分子小于分母就是缩小。
例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实的脉冲来进行。
上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉3、 怎样计算电子齿轮比(B/A)
明白几个概念:
编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。
看伺服电机的铭牌,在对驱动器说明书既可确定编码器的分每转脉冲数(f):丝杠转动一圈所需脉冲数。
脉冲当量(p):数控系统(上位机)发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是数控系统所这个值越小,经各种补偿后越容易到更高的加工精度和表面质量。
脉冲当量的设定值决定机床的最大进给速度,当要求的情况下,可以设定较小的脉冲当量。
螺距(d):螺纹上相邻两牙对应点之间的轴向距离。
电子齿轮分子B电子齿轮分母A SOMA(索玛)挤压丝锥 QQ582872501
100360
轮齿数的比值。
在数控机床上为电机轴转速
为分子,一个为分母。
如分子大于分母就是
分母设为2,那么伺服实际运行速度按照50HZ
运行速度按照200HZ的脉冲来进行
书既可确定编码器的分辨率。
度数,也是数控系统所能控制的最小距离。
机床的最大进给速度,当进给速度速度满足。