matlab仿真实例
matlab电气仿真实例
matlab电气仿真实例MATLAB电气仿真实例在本文中,我们将探讨MATLAB在电气仿真领域中的应用。
通过一个具体的实例,我们将展示如何使用MATLAB进行电气系统的建模、分析和仿真。
1. 引言电气系统的建模和仿真对于设计和分析电路、控制系统、电力系统等具有重要意义。
传统的电气仿真方法需要手动编写大量的数学方程,并且计算过程繁琐。
而MATLAB提供了一种快速、简便且高效的方式来实现电气仿真。
2. 问题描述假设我们有一个简化的直流电机系统。
系统包括一个直流电机、一个电阻和一个电压源。
我们想要分析在给定电压下电机的转速以及电机周围的电压和电流的变化情况。
3. 建立电气系统模型首先,我们需要建立电气系统的数学模型。
在本例中,我们使用电路定律(基尔霍夫定律和欧姆定律)来建立模型。
根据基尔霍夫定律,我们可以得到电路的电流方程:I = \frac{V}{R}其中,I是电流,V是电压,R是电阻。
根据欧姆定律,我们可以得到电机的速度与电压之间的关系:\omega = \frac{V}{K}其中,ω是电机的角速度,V是电压,K是电机的转速常数。
基于这些方程,我们可以进一步建立系统的状态空间模型:\begin{bmatrix} \dot{\omega} \\ \dot{I} \end{bmatrix} =\begin{bmatrix} 0 & \frac{-1}{K} \\ 0 & \frac{-1}{R}\end{bmatrix} \begin{bmatrix} \omega \\ I \end{bmatrix} +\begin{bmatrix} \frac{1}{K} \\ 0 \end{bmatrix} V其中,\dot{\omega}和\dot{I}分别表示电机速度和电流的导数。
4. MATLAB仿真现在我们可以使用MATLAB进行仿真了。
首先,我们需要定义系统的参数和初始条件。
例如,我们可以选择电压源电压为12V,电阻为1Ω,转速常数为10。
模糊控制的Matlab仿真实例
其他例子
模型Shower.mdl―淋浴温度调节模糊控制系统仿真; 模型slcp.mdl―单级小车倒摆模糊控制系统仿真; 模型 slcp1.mdl―变长度倒摆小车模糊控制系统仿
真; 模型 slcpp1.mdl—定长、变长二倒摆模糊控制系
统仿真; 模型slbb.mdl―球棒模糊控制系统仿真; 模型sltbu.mdl―卡车智能模糊控制倒车系统仿真; 模型sltank2.mdl ― 用子系统封装的水箱控制仿
为简单起见,我们直接利用系统里已经编辑好的 模糊推理系统,在它的基础上进行修改。这里我 们采用与tank . fis中输入输出变量模糊集合完 全相同的集合隶属度函数定义,只是对模糊规则 进行一些改动,来学习模糊工具箱与仿真工具的 结合运用。对于这个问题,根据经验和直觉很显 然可以得到如下的模糊度示 波器
冷水阀子系统
这个仿真模型的输出是用示波器来表示的,如 图所示。通过示波器上的图形我们可以清楚地 看到温度和水流量跟踪目标要求的性能。
水温示波器
水流示波器
水温偏差区间模糊划分及隶属度函数
水流量偏差区间模糊划分及隶属度函数
输出对冷水阀控制策略的模糊化分及隶属度函数
选Edit菜单,选择Rules, 弹出一新界面Rule Editor. 在底部的选择框内,选择相应的 IF…AND…THEN 规则,点击Add rule 键,上部 框内将显示相应的规则。本例中用9条左右的规 则,依次加入。如下图所示:
模糊逻辑工具箱仿真结果
模糊规则浏览器用于显示各条模糊控制规则对 应的输入量和输出量的隶属度函数。通过指定 输入量,可以直接的显示所采用的控制规则, 以及通过模糊推理得到相应输出量的全过程, 以便对模糊规则进行修改和优化。
这样的结果与实际情况还是有些不符。通常顾客都是给15%的 小费,只有服务特别好或特别不好的时候才有改变,也就是说, 希望在图形中间部分的响应平坦些,而在两端(服务好或坏) 有凸起或凹陷。这时服务与小费是分段线性的关系。例如,用 下面 MATLAB 语句绘出的下图的情况。
matlab-SIMULINK仿真实例

二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析)对动平台4:受力分析如图4F24x+F43x=m4*Ac4x (1)F24y+F43y=m4*Ac4y (2)F24y*rc4-F43y*rc4=0 (3)图4动平台4的受力分析对并联杆2:受力分析如图5F12x+F24x=-m2*Ac2x (4)F12y+F24y=-m2*Ac2y (5)F12x*rc2*S2+F12y*rc2*C2-F24x*rc2*S2-F24y*rc2*C2=I2*α2 (6)图5并联杆2的受力分析对直线电机滑块1:受力分析如图6Fm+F12x=m1*r1_dot_dot (7)Fy=F12y (8)图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R1+R2=R3+R4将上述矢量方程分解为x和y方向,并分别对方程两边对时间t求两次导数得:r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12)r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13)三)质心加速度的矢量方程F13x+F43x=-m3*Ac3x (9)F13y+F43y=-m3*Ac3y (10)F43x*r3*C3+F43y*r3*S3= I3*α3 (11)图9质心加速度的矢量示意图矢量关系:Ac3=Rc3_dot_dotAc4=R3_dot_dot+ Rc4_dot_dotAc2=R3_dot_dot+ R4_dot_dot+ Rc2_dot_dot (_dot_dot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm 引入的加速度有:α2,α3,r1_dot_dot ,Ac3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式1010000000000200000010100000000002002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----300000000101000000003000000333300003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅003300001000000000000033000001000000000000330001rc C r S r C ⎛⎫⎪ ⎪⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα••⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
matlab连续时间系统的建模与仿真实例

【标题】Matlab中连续时间系统的建模与仿真实例【正文】1. 概述在工程领域中,连续时间系统的建模与仿真是非常重要的环节。
Matlab作为一款强大的工程计算软件,提供了丰富的工具和功能,可以帮助工程师们高效地完成系统建模与仿真的工作。
本文将以连续时间系统的建模与仿真为主题,通过实例的方式,从简到繁地探讨Matlab中的相关应用。
2. 相关概念解释在开始具体的实例之前,我们先来了解一下什么是连续时间系统的建模与仿真。
连续时间系统是指系统的输入和输出都是连续的,可以用连续函数来描述。
而建模与仿真则是指利用数学模型和计算机软件,对系统进行描述和分析,并用计算机模拟系统的行为。
Matlab提供了Simulink等工具,可以方便地进行连续时间系统的建模与仿真。
3. 实例展示接下来,我们将通过一个简单的实例来演示Matlab中连续时间系统的建模与仿真。
假设我们要建立一个受控物体的连续时间系统模型,并对其进行仿真。
在Matlab中,我们可以首先使用Simulink工具搭建系统模型,包括输入信号、系统传输函数等。
通过设置仿真参数和运行仿真,我们可以得到系统的输出响应,进而进行分析和评估。
4. 实例分析在实例展示中,我们可以逐步扩展系统模型的复杂度,加入更多的控制器、传感器等元素,以更贴近实际工程应用场景。
利用Matlab强大的数据处理和分析功能,可以对仿真结果进行详细的分析和评估,验证系统性能和稳定性。
5. 总结与回顾通过本文的实例演示,我们了解了Matlab中连续时间系统建模与仿真的基本流程和方法。
在工程实践中,合理使用Matlab工具,可以极大地提高系统设计与分析的效率和准确性。
值得注意的是,系统建模与仿真需要结合实际情况进行灵活应用,才能更好地发挥其作用。
6. 个人观点个人认为,Matlab提供的工程计算工具具有很高的实用性和适用性,尤其对于连续时间系统的建模与仿真来说,其优势尤为突出。
希望工程师们能够深入学习和应用Matlab工具,不断提升自己在系统设计与分析领域的能力。
matlab通信仿真实例

matlab通信仿真实例通信仿真在工程领域中具有广泛的应用,MATLAB作为一种强大的数学建模工具,能够帮助工程师进行通信系统的仿真设计和分析。
在本文中,我们将通过一个具体的MATLAB通信仿真实例来展示如何使用MATLAB进行通信系统的建模和仿真。
首先,我们需要定义一个简单的通信系统,假设我们要设计一个基于QPSK调制的数字通信系统。
我们可以按照以下步骤进行仿真实例的设计:1. 生成随机比特序列:首先我们需要生成一组随机的比特序列作为发送端的输入。
我们可以使用MATLAB的randi函数来生成随机的二进制比特序列。
2. QPSK调制:接下来,我们需要将生成的二进制比特序列进行QPSK调制,将比特序列映射到QPSK星座图上的相应点。
我们可以使用MATLAB的qammod 函数来进行QPSK调制。
3. 添加高斯噪声:在通信信道中,往往会存在各种噪声的干扰,为了模拟通信信道的实际情况,我们需要在信号上添加高斯噪声。
我们可以使用MATLAB的awgn函数来添加高斯噪声。
4. QPSK解调:接收端接收到信号后,需要进行QPSK解调,将接收到的信号映射回比特序列。
我们可以使用MATLAB的qamdemod函数来进行QPSK解调。
5. 比特误码率计算:最后,我们可以计算仿真的比特误码率(BER),用来评估通信系统的性能。
我们可以通过比较发送端和接收端的比特序列来计算比特误码率。
通过以上步骤,我们就可以完成一个基于QPSK调制的数字通信系统的MATLAB仿真实例。
在实际的通信系统设计中,我们可以根据具体的需求和系统参数进行更加复杂的仿真设计,例如考虑信道编码、信道估计等因素,以更加准确地评估通信系统的性能。
MATLAB的强大数学建模和仿真功能,为工程师提供了一个非常有用的工具,可以帮助他们设计和分析各种通信系统。
通过不断的实践和学习,工程师可以更加熟练地运用MATLAB进行通信系统的仿真设计,为通信系统的性能优化提供有力的支持。
MATLAB实现通信系统仿真实例
补充内容:模拟调制系统的MATLAB 仿真1。
抽样定理为了用实验的手段对连续信号分析,需要先对信号进行抽样(时间上的离散化),把连续数据转变为离散数据分析。
抽样(时间离散化)是模拟信号数字化的第一步.Nyquist 抽样定律:要无失真地恢复出抽样前的信号,要求抽样频率要大于等于两倍基带信号带宽.抽样定理建立了模拟信号和离散信号之间的关系,在Matlab 中对模拟信号的实验仿真都是通过先抽样,转变成离散信号,然后用该离散信号近似替代原来的模拟信号进行分析的。
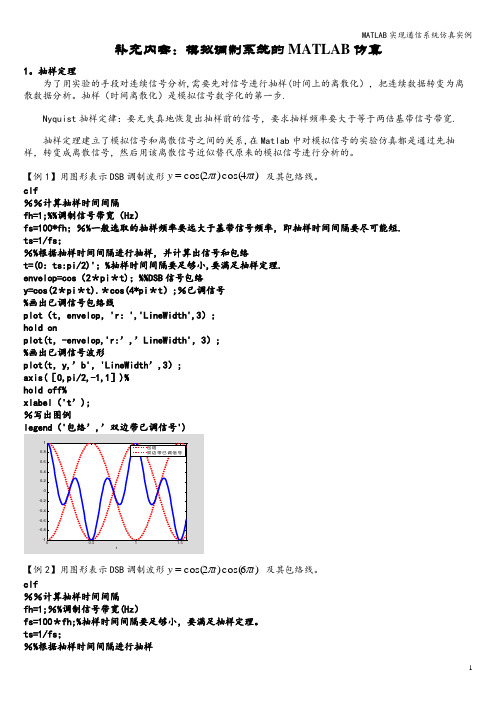
【例1】用图形表示DSB 调制波形)4cos()2cos(t t y ππ= 及其包络线。
clf%%计算抽样时间间隔fh=1;%%调制信号带宽(Hz )fs=100*fh ;%%一般选取的抽样频率要远大于基带信号频率,即抽样时间间隔要尽可能短. ts=1/fs ;%%根据抽样时间间隔进行抽样,并计算出信号和包络t=(0:ts:pi/2)';%抽样时间间隔要足够小,要满足抽样定理.envelop=cos (2*pi *t);%%DSB 信号包络y=cos(2*pi *t).*cos(4*pi *t );%已调信号%画出已调信号包络线plot (t ,envelop ,'r :','LineWidth',3);hold onplot(t ,-envelop,'r:’,’LineWidth',3);%画出已调信号波形plot(t ,y,’b','LineWidth ’,3);axis([0,pi/2,-1,1])%hold off%xlabel ('t ’);%写出图例【例2】用图形表示DSB 调制波形)6cos()2cos(t t y ππ= 及其包络线。
clf%%计算抽样时间间隔fh=1;%%调制信号带宽(Hz )fs=100*fh;%抽样时间间隔要足够小,要满足抽样定理。
基于matlab的车辆工程仿真实例 -回复
基于matlab的车辆工程仿真实例-回复一个基于MATLAB的车辆工程仿真实例是车辆悬挂系统的分析与优化。
在汽车设计中,悬挂系统起着至关重要的作用,影响着车辆的舒适性、稳定性和操控性。
使用MATLAB可以通过建立车辆的动力学模型,对悬挂系统进行仿真分析和优化。
以下是一个可能的仿真实例步骤:1. 建立车辆的动力学模型:使用MATLAB 建立车辆的多体动力学模型,包括车体、车轮、悬挂系统等。
模型可以考虑车辆的质量分布、悬挂系统的刚度和阻尼等参数。
2. 仿真悬挂系统的响应:在建立好动力学模型后,可以通过输入不同的激励,如车速、道路条件等,模拟悬挂系统的动态响应。
通过仿真可以了解车辆在不同工况下的悬挂系统行为,如车身姿态、轮胎力等。
3. 分析悬挂系统参数的影响:在模拟悬挂系统的响应之后,可以通过改变悬挂系统的参数,如刚度和阻尼,来分析这些参数对悬挂系统响应的影响。
通过分析可以确定最优的悬挂系统参数,以满足特定的需求,如舒适性、稳定性等。
4. 优化悬挂系统设计:基于分析结果,可以对悬挂系统的设计进行优化。
通过MATLAB的优化工具箱,可以使用不同的优化算法,如遗传算法、粒子群算法等,来搜索最优的悬挂系统参数组合。
5. 评估优化结果:在优化过程中,评估优化结果的有效性是必要的。
可以使用MATLAB的仿真工具再次运行优化后的悬挂系统模型,并进行性能评估。
性能评估可以包括悬挂系统的响应、车辆稳定性、舒适性等方面。
通过以上步骤,可以使用MATLAB对车辆悬挂系统进行仿真分析和优化,以改善车辆的悬挂系统性能。
这个实例展示了MATLAB 在车辆工程中的应用,可以帮助工程师更好地理解和优化车辆的悬挂系统。
matlab连续时间系统的建模与仿真实例
matlab连续时间系统的建模与仿真实例标题:深入探讨matlab连续时间系统的建模与仿真实例一、引言在工程领域中,连续时间系统的建模与仿真是非常重要的一环。
使用matlab作为工具可以帮助工程师们更好地理解和分析连续时间系统的行为。
本文将深入探讨matlab在连续时间系统建模与仿真中的实际应用,帮助读者更好地掌握这一领域的知识。
二、连续时间系统建模与仿真概述连续时间系统建模与仿真是指利用数学方法和计算机工具对连续时间系统进行抽象化描述和模拟。
在工程实践中,这一过程可以帮助工程师们更好地理解系统的动态特性、分析系统的稳定性和性能,并设计控制策略以满足特定的需求。
1.连续时间系统建模方法连续时间系统建模的方法有很多种,常用的包括微分方程描述、传递函数描述、状态空间描述等。
在matlab中,可以利用Simulink工具箱来快速构建系统的模型,并进行仿真分析。
2.连续时间系统仿真实例下面我们将以一个简单的例子来展示如何使用matlab对连续时间系统进行建模和仿真。
假设有一个带有阻尼的弹簧质量系统,其运动方程可以描述为:\[ m \frac{d^2 x(t)}{dt^2} + c \frac{dx(t)}{dt} + kx(t) = F(t) \]其中,m为质量,c为阻尼系数,k为弹簧常数,F(t)为外部作用力。
我们希望利用matlab对这个系统进行建模,并仿真系统的动态响应。
三、matlab建模与仿真实例1.建立模型在matlab中打开Simulink工具箱,我们可以直接从库中选择弹簧质量阻尼系统的模块进行快速搭建。
将质量、阻尼、弹簧和外部作用力连接起来,即可构建出系统的模型。
2.参数设定设定系统的参数:m=1kg, c=0.5N/m/s, k=2N/m, 外部作用力F(t)=sin(t)。
3.仿真分析设置仿真时间为10s,运行仿真,观察系统的位移-时间和速度-时间响应。
四、实验结果分析通过matlab进行仿真,我们可以得到系统的位移和速度随时间的变化曲线。
matlab通信仿真实例
matlab通信仿真实例在Matlab中进行通信系统的仿真,可以涉及到多种不同的通信技术和协议,包括调制解调、信道编码、多址接入等。
以下以OFDM系统为例,介绍Matlab 中通信仿真的实例。
OFDM(正交频分复用)是一种常用于现代通信系统中的技术,它将高速数据流分割成多个较低速的子流,并将每个子流分配到不同的子载波上。
优点是能够抵抗多径效应和频率选择性衰落,并提供高数据速率。
首先,我们需要创建一个包含OFDM系统参数的结构体。
例如:ofdmParam.M = 16; % 子载波数量ofdmParam.K = 4; % 用于混合多路复用的用户数量ofdmParam.N = ofdmParam.M * ofdmParam.K; % 总子载波数量ofdmParam.CP = 16; % 循环前缀长度接下来,我们可以生成用于OFDM仿真的数据流。
例如,我们可以使用随机整数生成器生成一系列整数,并将其转换为复数形式的调制符号:data = randi([0, ofdmParam.M-1], 1, ofdmParam.N);dataMod = qammod(data, ofdmParam.M);然后,我们可以创建一个包含OFDM信号的函数。
在OFDM系统中,生成的数据符号将分配到不同的子载波上,然后在时域中通过插入循环前缀进行叠加:function[ofdmSignal] = createOFDMSignal(dataMod, ofdmParam) ofdmSignal = [];for k = 0:ofdmParam.K-1% 提取相应的数据符号,并进行IFFTofdmData =ifft(dataMod(k*ofdmParam.M+1:(k+1)*ofdmParam.M));% 添加循环前缀ofdmDataWithCP = [ofdmData(end-ofdmParam.CP+1:end), ofdmData];% 将OFDM符号添加到OFDM信号中ofdmSignal = [ofdmSignal, ofdmDataWithCP];endend将OFDM信号传输到信道中,我们可以使用加性高斯白噪声(AWGN)信道模型来模拟实际通信环境:EbNo = 10; % 信噪比snr =10*log10(ofdmParam.N*ofdmParam.M/(ofdmParam.N*ofdmParam.M+1 )*(10^(EbNo/10)));ofdmSignalNoisy = awgn(ofdmSignal, snr, 'measured');最后,我们可以对接收到的OFDM信号进行解调和信号恢复。
MATLAB在仿真与模拟方面的应用实例

MATLAB在仿真与模拟方面的应用实例一、简介MATLAB是一款强大且广泛应用于科学计算和工程设计领域的软件工具。
它提供了丰富的函数库和工具箱,方便用户进行数据分析、数值计算、信号处理以及模拟仿真等工作。
本文将介绍MATLAB在仿真与模拟方面的应用实例,分别从电子电路设计、通信系统仿真以及控制系统设计等方面展开。
二、电子电路设计电子电路设计是电子工程领域中一项重要的工作。
MATLAB提供了一系列丰富的工具箱,例如Simulink和Simscape等,可以用于电子电路的建模和仿真。
以放大器设计为例,我们可以使用MATLAB进行仿真。
首先,我们可以使用Simulink建立电路模型,包括信号源、滤波器、放大器等组件,并设置相应的参数。
然后,通过添加信号源以及观察输出信号的方式,可以对放大器的性能进行评估,并通过实时仿真结果进行调整和优化。
此外,MATLAB还提供了各种仿真工具和函数,如电路分析工具箱和电路设计工具箱等,可以用于分析电路参数以及进行设计和优化。
通过MATLAB的电子电路设计工具,工程师们能够更加高效地进行电子电路的仿真和设计工作。
三、通信系统仿真通信系统是一种用于传输和接收信息的系统。
MATLAB提供了用于建模和仿真通信系统的工具箱,例如通信工具箱和信号处理工具箱等。
通过使用MATLAB的通信工具箱,我们可以建立和仿真各种通信系统,如数字调制解调、信道编码解码以及误码率分析等。
我们可以设置发送端和接收端的参数,并使用各种信号处理算法进行仿真。
通过调整参数和算法,可以评估和优化通信系统的性能。
此外,MATLAB还提供了用于处理和分析信号的函数和工具箱,如滤波器设计、频谱分析和信号重构等。
这些工具有助于工程师们更好地理解信号特性,并进行通信系统的仿真和设计。
四、控制系统设计控制系统是一种用于控制和调节系统行为的系统。
MATLAB提供了用于建模和仿真控制系统的工具箱,例如控制系统工具箱和优化工具箱等。
matlab仿真实例100题

matlab仿真实例100题Matlab是一种强大的数学软件,广泛应用于科学计算、数据分析和工程仿真等领域。
在学习和使用Matlab的过程中,通过实例的方式进行仿真练习是一种非常有效的学习方法。
下面将给出100个Matlab仿真实例题目,帮助读者更好地掌握Matlab的使用。
1. 编写一个程序,计算并输出1到100之间所有奇数的和。
2. 编写一个程序,计算并输出1到100之间所有偶数的乘积。
3. 编写一个程序,计算并输出1到100之间所有素数的个数。
4. 编写一个程序,计算并输出1到100之间所有整数的平方和。
5. 编写一个程序,计算并输出1到100之间所有整数的立方和。
6. 编写一个程序,计算并输出1到100之间所有整数的阶乘和。
7. 编写一个程序,计算并输出1到100之间所有整数的倒数和。
8. 编写一个程序,计算并输出1到100之间所有整数的平均值。
9. 编写一个程序,计算并输出1到100之间所有整数的中位数。
10. 编写一个程序,计算并输出1到100之间所有整数的标准差。
11. 编写一个程序,计算并输出1到100之间所有整数的方差。
12. 编写一个程序,计算并输出1到100之间所有整数的最大值。
13. 编写一个程序,计算并输出1到100之间所有整数的最小值。
15. 编写一个程序,计算并输出1到100之间所有整数的平方根和。
16. 编写一个程序,计算并输出1到100之间所有整数的立方根和。
17. 编写一个程序,计算并输出1到100之间所有整数的对数和。
18. 编写一个程序,计算并输出1到100之间所有整数的指数和。
19. 编写一个程序,计算并输出1到100之间所有整数的正弦和。
20. 编写一个程序,计算并输出1到100之间所有整数的余弦和。
21. 编写一个程序,计算并输出1到100之间所有整数的正切和。
22. 编写一个程序,计算并输出1到100之间所有整数的双曲正弦和。
23. 编写一个程序,计算并输出1到100之间所有整数的双曲余弦和。
MATLAB仿真实例

MATLAB仿真实例通信原理是研究信息在传输中的传递、编码、解码、调制、解调、信道等各个方面的原理和技术。
MATLAB是一种基于数值计算和可视化的高级计算语言和交互式环境,常用于科学计算、算法开发、数据分析和可视化等领域。
下面将介绍一个基于MATLAB的通信原理仿真实例。
实例描述:假设有一个发送端和一个接收端,通过一个信道进行通信。
发送端生成了一个数字信号序列,将其通过一种调制技术转换为模拟信号,经过信道传输到接收端后,接收端需要对接收到的模拟信号进行解调,得到原始的数字信号序列,并与发送端生成的数字信号序列进行比较,评估通信系统的性能。
实例步骤:1.生成数字信号序列:使用MATLAB生成一个随机的二进制数字信号序列。
例如,一个200个比特的数字信号序列可以使用以下代码生成:```MATLABbits = randi([0 1], 1, 200);```2. 调制:在本例中,我们使用二进制相移键控(Binary Phase Shift Keying,BPSK)调制方式将数字信号序列转换为模拟信号。
将1映射为1,将0映射为-1、以下是BPSK调制的MATLAB代码实现:```MATLABmodulated_signal = 2*bits - 1;```3. 添加通道噪声:在信道传输过程中,由于各种原因(如传输损耗、多径效应等),信号可能会受到一定的噪声干扰。
在本例中,我们假设信道噪声为高斯白噪声。
可以使用MATLAB的awgn函数在模拟信号中添加高斯白噪声。
以下是添加高斯白噪声的MATLAB代码实现:```MATLABSNR_dB=10;%信噪比(信号功率与噪声功率之比)received_signal = awgn(modulated_signal, SNR_dB, 'measured');```4.解调:接收端需要对接收到的带有噪声的模拟信号进行解调,以恢复原始的数字信号序列。
对于BPSK调制,可以通过判断接收信号的正负性来解调。
第五章MATLAB在电力系统故障分析中的仿真实例精选全文

第五章MATLAB在电力系统故障分析 中的仿真实例
第五章MATLAB在电力系统故障分析 中的仿真实例
无阻尼绕组同步发电机三相短路电流计算
第五章MATLAB在电力系统故障分析 中的仿真实例
第五章MATLAB在电力系统故障分析 中的仿真实例
图5-13 发电机端突然发生三相短路的Simulink仿真模型
第五章MATБайду номын сангаасAB在电力系统故障分析 中的仿真实例
图5-14 同步发电机模块的参数设置
第五章MATLAB在电力系统故障分析 中的仿真实例
图5-15 升压变压器模块的参数设置
第五章MATLAB在电力系统故障分析 中的仿真实例
第五章MATLAB在电力系统故障分析 中的仿真实例
6)Transition status和Transition times用来设置转换状态和转换时间; 其中,Transition status表示故障开关的状态,通常用“1”表示闭合, “0”表示断开;Transition times表示故障开关的动作时间;并且 每个选项都有两个数值,而且它们是一一对应的。 7)Snubbers resistance和snubbers Capacitance用来设置并联缓冲电 路中的过渡电阻和过渡电容。 8)Measurements 用来选择测量量。
图5-16 利用Powergui模块的潮流计算和电机初始化窗口计算初始参数
第五章MATLAB在电力系统故障分析 中的仿真实例
•5.3 单相短路故障仿真
•当网络元件只用电抗表示时,不对称短路的序网络方程
第五章MATLAB在电力系统故障分析 中的仿真实例
如何使用Matlab进行系统建模和仿真

如何使用Matlab进行系统建模和仿真一、引言在现代科学和工程领域,系统建模和仿真是解决实际问题和优化设计的重要手段之一。
Matlab作为一种功能强大的工具,被广泛应用于系统建模和仿真。
本文将介绍如何使用Matlab进行系统建模和仿真的基本步骤,并通过实例演示其应用。
二、系统建模系统建模是将实际系统抽象成数学或逻辑模型的过程。
在Matlab中,可以使用符号表达式或差分方程等方式对系统进行建模。
1. 符号表达式建模符号表达式建模是一种基于符号计算的方法,可以方便地处理复杂的数学运算。
在Matlab中,可以使用符号工具箱来进行符号表达式建模。
以下是一个简单的例子:```matlabsyms xy = 2*x + 1;```在上述例子中,定义了一个符号变量x,并使用符号表达式2*x + 1建立了y的表达式。
通过符号工具箱提供的函数,可以对y进行求导、积分等操作,从而分析系统的特性。
2. 差分方程建模差分方程建模是一种基于离散时间的建模方法,适用于描述离散时间系统。
在Matlab中,可以使用差分方程来描述系统的行为。
以下是一个简单的例子:```matlabn = 0:10;x = sin(n);y = filter([1 -0.5], 1, x);```在上述例子中,定义了一个离散时间信号x,通过filter函数可以求得系统响应y,其中[1 -0.5]表示系统的差分方程系数。
三、系统仿真系统仿真是利用计算机模拟系统的运行过程,通过数值计算得到系统的输出响应。
在Matlab中,可以使用Simulink工具箱进行系统仿真。
1. 搭建系统框图在Simulink中,我们可以使用各种模块来搭建系统的框图。
例如,可以使用连续时间积分器模块和乘法器模块来构建一个简单的比例积分控制器:在上图中,积分器模块表示对输入信号积分,乘法器模块表示对输入信号进行放大。
(完整版)Matlab仿真实例-卫星轨迹

卫星轨迹一.问题提出设卫星在空中运行的运动方程为:其中是k 重力系数(k=401408km3/s )。
卫星轨道采用极坐标表示,通过仿真,研究发射速度对卫星轨道的影响。
实验将作出卫星在地球表面(r=6400KM ,θ=0)分别以v=8KM/s,v=10KM/s, v=12KM/s 发射时,卫星绕地球运行的轨迹。
二.问题分析1.卫星运动方程一个二阶微分方程组,应用Matlab 的常微分方程求解命令ode45求解时,首先需要将二阶微分方程组转换成一阶微分方程组。
若设 ,则有:2.建立极坐标如上图所示,初值分别为:卫星径向初始位置,即地球半径:y(1,1)=6400;卫星初始角度位置:y(2,1)=0;卫星初始径向线速度:y(3,1)=0;卫星初始周向角速度:y(4,1)=v/6400。
3.将上述一阶微分方程及其初值带入常微分方程求解命令ode45求解,可得到一定时间间隔的卫星的径向坐标值y (1)向量;周向角度坐标值y(2)向量;径向线速度y(3)向量;周向角速度y(4)向量。
4.通过以上步骤所求得的是极坐标下的解,若需要在直角坐标系下绘制卫星的运动轨迹,还需要进行坐标变换,将径向坐标值y (1)向量;周向角度坐标值y (2)向量通过以下方程转换为直角坐标下的横纵坐标值X,Y 。
5.卫星发射速度速度的不同 将导致卫星的运动轨迹不同,实验将绘制卫星分别以v=8KM/s ,v=10KM/s ,v=12KM/s 的初速度发射的运动轨迹。
三.Matlab 程序及注释1.主程序v=input ('请输入卫星发射速度单位Km/s :\nv='); %卫星发射速度输入.axis ([—26400 7000 -10000 42400 ]); %定制图形输出坐标范围.%为了直观表达卫星轨迹,以下语句将绘制三维地球.[x1,y1,z1]=sphere(15); %绘制单位球。
x1=x1*6400;y1=y1*6400; ⎪⎪⎩⎪⎪⎨⎧-=+-=dt d dt dr r dt d dt d r r k dt r d θθθ2)(222222θ==)2(,)1(y r y ⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧**-=**+*-===)1(/)4()3(2)4()4()4()1()1()1()3()4()2()3()1(y y y dt dy y y y y y k dt dy y dt dy y dt dy ⎩⎨⎧*=*=)]2(sin[)1(Y )]2(cos[)1(X y y y yz1=z1*6400;%定义地球半径。
MATLAB仿真实例

一、实验目的 (1)二、实验题目 (1)三、实验内容 (1)3.1傅里叶变换与傅里叶反变换 (1)3.2题目一:正弦信号波形及频谱 (2)3.2.1仿真原理及思路 (2)3.2.2程序流程图 (3)3.2.3仿真程序及运行结果 (3)3.2.4实验结果分析 (5)3.3题目二:单极性归零(RZ)波形及其功率谱 (5)3.3.1仿真原理及思路 (5)3.3.2程序流程图 (6)3.3.3仿真程序及运行结果 (6)3.3.4实验结果分析 (8)3.4题目三:升余弦滚降波形的眼图及其功率谱 (8)3.4.1仿真原理及思路 (8)3.4.2程序流程图 (8)3.4.3仿真程序及运行结果 (8)3.4.4实验结果分析: (10)3.5题目四:完成PCM编码及解码的仿真 (11)3.5.1仿真原理及思路 (11)3.5.2程序流程图 (12)3.5.3仿真程序及运行结果 (12)3.5.4实验结果分析 (15)3.6附加题一:最佳基带系统的Pe~Eb\No曲线,升余弦滚降系数a=0.5,取样值的偏差是Ts/4 (16)3.6.1仿真原理及思路 (16)3.6.2程序流程图 (16)3.6.3仿真程序及运行结果 (16)3.6.4实验结果分析 (18)3.7附加题二:试作出Pe~Eb/No曲线。
升余弦滚降系数a=0.5,取样时间无偏差,但信道是多径信道,C(f)=|1-0.5-j2 ft|,t=T s/2 (18)3.7.1仿真原理及思路 (18)3.7.2程序流程图 (19)3.7.3仿真程序及运行结果 (19)3.7.4实验结果分析 (21)四、实验心得 (21)一、 实验目的⏹ 学会MATLAB 软件的最基本运用。
MATLAB 是一种很实用的数学软件,它易学易用。
MATLAB 对于许多的通信仿真类问题来说是很合适的。
⏹ 了解计算机仿真的基本原理及方法,知道怎样通过仿真的方法去研究通信问题。
⏹ 加深对通信原理课程有关内容的理解。
matlab通信仿真实例

matlab通信仿真实例Matlab通信仿真实例:频移键控(FSK)调制与解调引言:通信系统在现代社会的发展中起着关键作用,其性能的评估和优化是一个重要的研究方向。
Matlab作为通信仿真的强大工具,具有广泛的应用。
本文将以频移键控(FSK)调制与解调为例,介绍如何使用Matlab进行通信仿真实例。
我们将从FSK调制与解调的基本原理开始,逐步介绍Matlab编程实现。
第一节:FSK调制原理频移键控(FSK)是一种基于频率调制的数字调制技术。
在FSK调制中,数字数据被映射到不同的频率,即0和1分别对应不同的载波频率。
调制信号可以表示为:s(t) = Acos(2πf1t) ,当输入为0s(t) = Acos(2πf2t) ,当输入为1其中s(t)为调制信号,A为幅度,f1和f2分别为两个载波频率。
FSK信号的频谱包含这两个载波频率。
下面我们将使用Matlab实现FSK调制。
第二节:Matlab编程实现FSK调制在Matlab中,我们可以使用频率生成器函数freqgen来生成不同频率的信号。
首先,我们需要在Matlab中定义载波频率f1和f2,和待调制的数字数据序列x。
f1 = 1000; 第一个载波频率f2 = 2000; 第二个载波频率x = [0 1 0 1 0]; 待调制的数字数据序列接下来,我们可以根据以上公式,使用正弦函数生成相应的调制信号。
t = 0:0.0001:0.001; 时间间隔s = zeros(size(t)); 初始化调制信号为0for i = 1:length(x)if x(i) == 0s = s + cos(2*pi*f1*t);elses = s + cos(2*pi*f2*t);endend在上述代码中,我们使用for循环遍历输入数据序列的每个元素,根据输入数据的值选择不同的载波频率,并将调制信号叠加在一起。
最后,我们得到了FSK调制信号s。
接下来,我们将介绍FSK解调的原理和Matlab 的实现。
模糊控制的Matlab仿真实例

THANK YOU
中心平均值去模糊化
去模糊化过程
04
Matlab仿真实例
输入输出变量定义
根据被控对象的特性,定义模糊控制系统的输入输出变量,如温度、湿度、压力等。
模糊化函数设计
为每个输入输出变量设计对应的模糊化函数,将实际值映射到模糊集合上。
模糊规则制定
根据专家知识和实际经验,制定模糊控制规则,如“如果温度过高,则调整冷却阀”。
输入输出关系
基于模糊逻辑运算和模糊集合的性质,建立输入和输出之间的映射关系。
推理规则
基于专家知识和经验,制定一系列的推理规则,用于指导模糊推理过程。
推理方法
常用的模糊推理方法包括最大值推理、最小值推理和中心平均值推理等。
模糊推理系统
02
Matlab模糊逻辑工具箱简介
模糊逻辑工具箱的功能
为了将模糊输出转换为实际输出,工具箱提供了多种去模糊化方法,如最大值去模糊化、最小值去模糊化和中心平均值去模糊化等。
性能指标选择
根据所选性能指标,采用合适的方法对模糊控制系统的性能进行评估,如极差分析法、方差分析法等。
性能评估方法
将模糊控制系统的性能与其他控制方法进行比较,如PID控制、神经网络控制等,以验证其优越性。
性能比较
01
02
03
模糊控制系统的性能评估
05
结论与展望
模糊控制对模型误差和参数变化具有较强的鲁棒性,能够适应不确定性和非线性系统。
输出模糊化
将模糊集合的输出映射到实际输出量上,同样采用隶属函数进行模糊化处理。
模糊化过程
基于matlab的车辆工程仿真实例

基于matlab的车辆工程仿真实例基于MATLAB的车辆工程仿真实例MATLAB是一种强大的数学计算软件,广泛应用于各种领域,包括车辆工程。
在车辆工程中,MATLAB可以用于模拟和优化车辆的性能,例如加速、制动、悬挂、转向等。
本文将介绍一个基于MATLAB的车辆工程仿真实例,以展示MATLAB在车辆工程中的应用。
本实例是一个简单的车辆加速仿真,目的是评估车辆的加速性能。
仿真模型包括车辆、发动机、变速器和轮胎等组成部分。
车辆模型采用简化的二自由度模型,发动机模型采用简单的动力学方程,变速器模型采用离散化的传动比,轮胎模型采用简单的摩擦力模型。
仿真过程中,输入加速踏板位置信号,输出车辆速度和加速度信号。
下面是仿真的主要步骤:1. 定义车辆模型参数,包括质量、惯性、轮距、轴距、重心高度等。
2. 定义发动机模型参数,包括最大功率、最大扭矩、转速范围等。
3. 定义变速器模型参数,包括传动比、换挡时间等。
4. 定义轮胎模型参数,包括摩擦系数、轮胎半径等。
5. 编写仿真程序,包括车辆动力学方程、变速器控制逻辑、轮胎摩擦力计算等。
6. 运行仿真程序,输入加速踏板位置信号,输出车辆速度和加速度信号。
7. 分析仿真结果,评估车辆的加速性能,例如0-100km/h加速时间、最大加速度等。
通过这个实例,我们可以看到MATLAB在车辆工程中的强大应用。
MATLAB提供了丰富的数学计算和仿真工具,可以帮助工程师快速建立车辆模型、优化车辆性能、评估车辆安全性等。
同时,MATLAB还可以与其他工具和平台集成,例如Simulink、CANape 等,进一步扩展其应用范围。
MATLAB是车辆工程中不可或缺的工具之一,它可以帮助工程师更好地理解和优化车辆性能,提高车辆的安全性、舒适性和环保性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
matlab 仿真实例实验五MATLAB 及仿真实验一、控制系统的时域分析(一)稳定性1、系统传递函数为G(s),试判断其稳定性。
程序:>> nu m=[3,2,5,4,6];>> den=[1,3,4,2,7,2];>> sys=tf( nu m,de n);>> figure(1);>> pzmap(sys);>> title(' 零极点图')由图可知:在S 右半平面有极点,因此可知系统是不稳定的。
2、用MATLA 求 出 G(s)=(s A 2+2*s+2)/(s A 4+7*s A 3+5*s+2) 的极点。
程序及结果:>> sys=tf([1,2,2],[1,7,3,5,2]);>> p=pole(sys)矿'.赳 _■ —-6.65530.0327 + 0.8555i0.0327 - 0.8555i-0.4100(二)阶跃响应1、二阶系统G(s)=10/s A2+2*s+101)键入程序,观察并记录单位阶跃响应曲线:程序:>> sys=tf(10,[1,2,10]);>> step(sys);>> title('G(s)=10/sA2+2*s+10 单位阶跃响应曲线')2)计算系统闭环跟、阻尼比、无阻尼振荡频率,并记录程序及结果:>> sys=tf(10,[1,2,10]);>> p=pole(sys)p =-1.0000 + 3.0000i-1.0000 - 3.0000i>> [wn,z]=damp(sys)wn =3.16233.1623z =0.31620.31623)记录实际测取的峰值大小,峰值时间和过渡过程时间,并填表实际值理论值峰值Cmax 1.35s峰值时间tp 1.05s过渡时间+5% 3.54sts +2% 3.18s程序:>> sys=tf(10,[1,2,10]);>> step(sys);>> title('G(s)=10/sA2+2*s+10 单位阶跃响应曲线')4) 修改参数,分别实现 E =1和E =2的响应曲线,并记录E =1: 程序:>> zeta=1;>> wn=sqrtm(1O)wn =3.1623>> sys=tf(10,[1,2*w n*zeta,1O]);>> step(sys)>> title(' E =1 响应曲线')叨F 5 卩吋巧^川尹1 :百 性「詰1 $上产1 ”2匸临-1 UH T 撕"ft 丽吁胡曲 ----------------- 址 tmt [se^J : 1 ———| -------- --s------------------ 剧:dm " : •二 善'Tee.附,吕 伽 IWx 1可知时创寻 阳IF 他址骼| r 42T *(图见下页)E =2:程序:>> zeta=2;>> wn=sqrtm(10)wn =3.1623>> sys=tf(10,[1,2*w n*zeta,10]);>> step(sys)>> title(' E =2 响应曲线')(曲线见下页)5)修改参数,分别实现wn 1=wn/2和wn2=2*wn的响应曲线,并记录wn 1=w0/2:程序:>> wn=sqrtm(10)wn =3.1623>> zeta=2/(wn*2)zeta =0.3162>> wn1=wn/2wn1 =1.5811>> sys=tf((w n1F2,[1,2*w n1*zeta,(w 门1)八2]); >> step(sys)>> title('wn1=wn/2 响应曲线') ( 曲线见下页)£R k"n>*- I-.'Efijjfc二Time frecl:wn 2=2*w n:程序:>> wn=sqrtm(10)wn =3.1623>> zeta=2/(w n*2)zeta =0.3162>> wn 2=2*w nwn2 =6.3246>> sys=tf((w n2F2,[1,2*w n2*zeta,(w 门2)八2]); >> step(sys)>> title('wn2=wn*2 响应曲线')2、作出以下系统的阶跃响应曲线,并与原系统响应曲线进行比较,作出相应实验分析结果。
1) G1(s)=(2*s+10)/(s A 2+2*s+10)程序:>> sys=tf(10,[1,2,10]);>>step(sys)>>hold on>>sys=tf([2,10],[1,2,10]);>>step(sys)A斗百LT->> gtext('\leftarrow G(s)');>> gtext('\leftarrow G1(s)');>> title('G1(s) 与G(s)阶跃响应曲线')(曲线见下页)实验分析结果:G1(s)与原系统响应曲线相比,峰值增加,峰值时间、上升时间、调节时间提前,最终稳定值相等。
2)G2(s)=(s A2+0.5*s+10) /(s A2+2*s+10)程序:>> sys=tf(10,[1,2,10]);step(sys)>> sys=tf(10,[1,2,10]);>>step(sys)>>hold on>>sys=tf([1,0.5,10],[1,2,10]);>>step(sys)>>gtext('\leftarrow G(s)');>>gtext('\leftarrow G2(s)');>> title('G2(s) 与G(s)阶跃响应曲线')( 曲线见下页)实验分析结果:G2(s) 与原系统响应曲线相比,峰值减小,峰值时间增加、上升时间减小、调节时间增加,最终稳定值相等。
3)G3(s)=(s A2+0.5*s)/(s A2+2*s+10)程序:>> sys=tf(10,[1,2,10]);>> step(sys)>> hold on>> sys=tf([1,0.5],[1,2,10]);>> step(sys)>> gtext('\leftarrow G(s)');>> gtext('\leftarrow G3(s)')>> title('G3(s) 与G(s)阶跃响应曲线')(曲线见下页)实验分析结果:G3(s) 与原系统响应曲线相比,峰值减小,峰值时间减小、上升时间减小、调节时间增加,最终稳定值不相等。
* Hi - I . I4)G4(s)=s/(sH+2*s+10)程序:>> sys=tf(10,[1,2,10]); >> gtext('\leftarrow G(s)'); >>step(sys) >>gtext('\leftarrow G4(s)');>>hold on >> title('G4(s) 与G(s)阶跃响应>>sys=tf(1,[1,2,10]); 曲线>>step(sys)实验分析结果:G4(s)与原系统响应曲线相比,峰值减小,峰值时间、上升时间、调节时间都相等,最终稳定值不相等。
W (町I F,.: K F7F F--=:-■存与兰电仝4盘------------ 4~、单位阶跃响应:3C(s)/R(s)=25/(sA2+4*s+25) 求该系统单位阶跃响应曲线,并在所得图形上加网格和标题:程序:>> sys=tf(25,[1,4,25]);>> step(sys)>> grid on;>> title('C(s)/R(s)=25/(s A2+4*s+25) 单位阶跃响应曲线')(图见下页图一)(二)系统动态特性分析用MATLA求二阶系统G(s)=120/(sA2+12*s+120)和G(s)=0.01/(sA2+0.002*s+0.01) 的峰值时间tp上升时间tr调整时间ts超调%。
G(s)=120/(sA2+12*s+120):程序:>> sys=tf(120,[1,12,120]);>> step(sys)>> title('G(s)=120/(s A2+12*s+120) 单位阶跃响应曲线') ( 曲线见下页图二)峰值时间tp=0.34s 上升时间tr=0.158s 调整时间ts=0.532s 超调量(T %=12.8%G(s)=0.01/(sA2+0.002*s+0.01)程序:>> sys=tf(0.01,[1,0.002,0.01]);>>step(sys)>>title('G(s)=0.01/(sA2+0.002*s+0.01) 单位阶跃响应曲线') ( 图见图三)峰值时间tp=32s 上升时间tr=10.3s 调整时间ts=3.9e+003s超调量(T %=96.7%S申F対K ^0tu» 1 T3 6曲甜妣11峯T 123Ail™ 個ec] t J* _ - 一亠-Z I r 轲加^ 3yE5^1lrgTtr6.o? l:j- D 5^2Sy tletli 巧'昌fraiyduH 1■j: F ■- L■-■>■史'車抚hr•粧碉厅曲锚图一5ME島肚-■_ND# TiflM (MCI: 0 /■=™c——*I /\/ ttarai i ■■=■fl I 屯朮If 啊氏打均币-----11jp!L J '■ • i -.ii.fti-ji.---- —j. ------------ ------ _____--- -- ---------------- ------------------- = --- ------------------------------------------------------------------------------------------ =q/ / ■ ifr F 1 ■ 1 ■! ! 1 /f_事 , _, j ■ _______ ■ E . . . __________________Il 1 IM | |l 8 I rl^l 1 ■iPt-se -3np±ud& I 97 mtrahaol CM 967 出 ir^ttec) 32 ■<sLc O1 J :3nC-C-C01 Z1[V 心0昭已厂=:.-■ 5中I -rpiiv-aiuei i 咖: "►rrb-r i :□-;、 图三。