轻量化高效索驱动并联机器人装备
delta高速并联机器人关键技术的

通过先进的视觉系统和运动控制技术, Delta机器人能够实现高精度的定位和操作 ,确保产品质量和生产效率。
并联结构
易于编程和集成
采用并联结构设计,使得机器人具有较高 的刚性和稳定性,能够应对各种复杂作业 场景。
Delta高速并联机器人支持多种编程语言和 通信协议,方便与现有生产线和设备进行 集成,降低改造成本。
高精度传感与检测技术
提升机器人的感知能力是实现更高精度和更稳定运动的关键。未来,高 精度传感与检测技术将成为高速并联机器人领域的重要研究方向。
技术创新与应用拓展思考
融合新技术
探索将新技术如深度学习、强化学习等引入高速并联机器人的控制和决策系统,以提高机器人的智能 水平和适应能力。
拓展应用领域
除了传统的制造业领域,可以进一步拓展高速并联机器人在医疗、航空航天、救援等领域的应用,以 满足更多复杂任务的需求。
delta高速并联机器人关 键技术的
汇报人: 日期:
contents
目录
• Delta高速并联机器人概述 • 关键技术之:机构设计与优化 • 关键技术之:运动规划与控制 • 关键技术之:感知与交互 • 关键技术之:系统集成与应用 • 技术挑战与发展趋势
01
Delta高速并联机器人概述
机器人定义与分类
环境感知与适应
动态环境建模:通过传感器数据实时构建环境模 型,为机器人的路径规划和动作执行提供准确依 据。
障碍物检测与规避:通过距离传感器和视觉传感 器实时检测障碍物,实现机器人的自主避障功能 。
自适应控制策略:根据环境变化实时调整机器人 的控制策略,确保机器人在复杂环境中的稳定性 和高效性。
通过以上关键技术的研究和应用,可以提高Delta 高速并联机器人的感知能力和交互性能,使其更 好地适应各种复杂应用场景,推动机器人技术的 进一步发展。
一种基于3-RPC6-UPS并联机构的自动钻铆机器人

一种基于3-RPC/6-UPS并联机构的自动钻铆机器人覃哲姜守帅(桂林航天工业学院机械工程学院,广西桂林541004)摘要提出一种基于3-RPC/6-UPS并联机构的自动钻铆机器人,旨在完成飞机壁板的钻铆加工任务。
执行钻铆加工时,机器人相当于一台固定式并联机床;步行时,机器人可以视为一个足式机器人。
建立了控制机器人钻铆执行器的6-UPS并联机构逆运动学模型,采用数值搜索方法得到钻铆执行器末端的工作空间。
建立了控制机器人行走的3-RPC并联机构逆运动学模型,采用数值搜索方法绘制出3-RPC并联机构上、下平台的工作空间,使用五次多项式对控制机器人行走的驱动杆进行位移轨迹规划,在虚拟软件中实现了机器人样机的平稳行走。
该研究工作可为设计新型的面向大型结构件加工的移动式机器人奠定理论基础。
关键词并联机构飞机壁板3-RPC6-UPS钻铆An Automatic Drilling and Riveting Robot based on3-RPC/6-UPS Parallel MechanismQin Zhe Jiang Shoushuai(College of Mechanical Engineering,Guilin University of Aerospace Technology,Guilin541004,China)Abstract An automatic drill and riveting robot based on3-RPC/6-UPS parallel mechanism is proposed to complete the drilling and riveting task of aircraft panel.The robot is equivalent to be a fixed parallel machine tool when performing drilling and riveting,and it also can be seen as a standing robot while walking.The in‐verse kinematics model of6-UPS parallel mechanism in charge of controlling the robot drilling and riveting ac‐tuator is established.The working space for the end of drilling and riveting actuator is obtained by numerical search method.The inverse kinematics model of3-RPC parallel mechanism in charge of controlling the robot walking is established.The working space of the upper and lower platform of the3-RPC parallel mechanism is drawn by numerical search method.The displacement trajectory of the driving rod controlling the robot walking is planned by quintic polynomials,and the smooth walking of the robot prototype is realized in the virtual soft‐ware.The research work could lay a theoretical foundation for the design of a new type of mobile robot for large-scale structural parts processing.Key words Parallel mechanism Aircraft pane3-RPC6-UPS Drilling and riveting0引言飞机壁板的连接质量对飞机的气动外形及其疲劳寿命有着至关重要的影响,而自动钻铆技术被广泛应用于飞机壁板的制孔和铆接,铆接的质量直接关乎着飞机的飞行安全[1-3]。
一种新型柔索驱动并联机器人的模型样机
P 点位置 确定 , 端执行 器接 口 尺 位置 随之 确 定 . 末
收 稿 日期 :2 0 .31 0 20 .9
基金项 目:国家 自然科学 基金资助项 目(9 3 0 0 . 5 8 5 5 ) 作者简介 :刘 杰 (9 4一) 男 , 14 , 辽宁沈阳人 , 东北大学 教授 , 士生导师 ;赵 明扬 ( 9 8一) 男 , 博 15 , 江苏扬 州人 , 中国科学 院沈阳 自动 化研究 所研 究员 , 博士生导师 .
( 东北 大 学 机 械 工 程 与 自 动 化学 院 ,辽 宁 沈 阳 10 0 ;2 1 10 4 .中 国 科 学 院 沈 阳 自动 化研 究 所 , 宁 沈 阳 10 1 ) 辽 10 5
摘
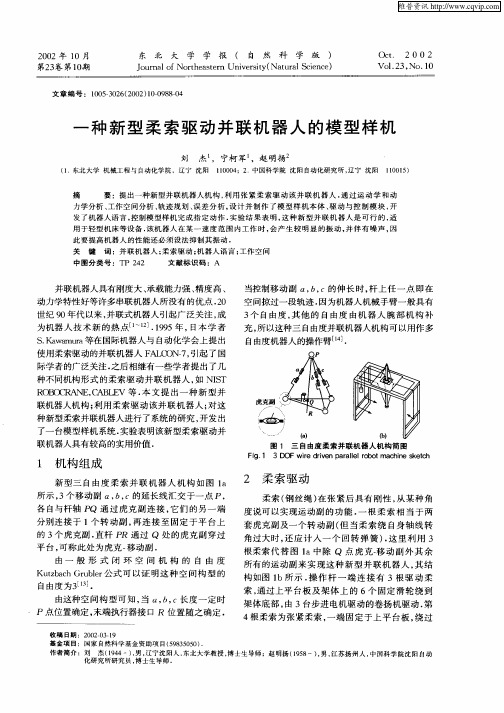
要 :提 出 一 种 新 型 并 联 机 器 人 机 构 , 用 张 紧 柔 索 驱 动 该 并 联 机 器 人 . 过 运 动 学 和 动 利 通
所有 的运动 副 来 实 现 这 种 新 型 并 联 机 器 人 , 结 其 构 如图 l b所 示 . 作 杆 一 端 连 接 有 3根 驱 动 柔 操
各 自与杆 轴 P 通 过 虎 克 副 连 接 , 们 的另 一 端 O 它 分 别连 接 于 1 转 动 副 , 连 接 至 固定 于平 台上 个 再 的 3个 虎克 副 . 直杆 P 通过 Q 处 的 虎 克 副穿 过 尺 平 台, 可称 此 处 为虎 克 一 移动 副 .
2 柔 索 驱 动
柔索 ( 丝 绳 ) 张 紧后 具 有 刚 性 , 某 种 角 钢 在 从 度说 可 以 实现 运 动副 的功 能 . 根 柔 索 相 当 于两 一 套 虎克 副 及一 个 转 动 副 ( 当 柔 索 绕 自身 轴 线 转 但 角过 大 时 , 应 计 入 一 个 回转 弹簧 ) 这 里 利 用 3 还 . 根柔 索 代 替 图 l 除 移
基于绳索驱动的并联康复机器人的研究

现代 设计 与 先进 制造 技术 ・
王卫 东
陈
柏
王
鹏 等
基 于绳 索驱 动 的并 联 康复 机 …… 3 1
基 于 绳 索 驱 动 的 并 联 康 复 机 器 人 的 研 究
王卫 东 陈 , 柏 王 , 鹏 陈 , 笋
( . 京航 空航 天 大学 机 电学 院 , 1南 江苏 南京
3 2
21 02年 6月 中 国制 造业 信息 化
第4 1卷
第 1 期 1
( 以右脚足跟着地 的瞬间开始计算 ) T为步态周 ; 期。 在一 个步 态周 期 内 , 盆左右 摆 动 1 , 下起 骨 次 上
工程 学 院和 医学 院联 合 研 制 的具 有 重力 平 衡 系 统 的 下肢外 骨 骼步 态矫 形器 , 过减 轻或 消 除腿部 重 通 力对 步行 的影 I [J I 3。上 述 机器 人 大 多 是 以杆 件 驱  ̄ 动, 在康 复 训 练 过 程 中 较 易 造 成 患 者 的不 适 与 不
(. 2 上海 交通 大学 医 学 院 附属新华 医院 , 海 上
201) 106
20 9 ) 0 0 2
摘 要 : 对腰 部康 复训 练过程 中如何协调控 制 患者骨盆 运动轨 迹 的 问题 , 计 了 由 6根 绳 索 牵引的 针 设
四 自由度 并联机 器人 。采 用封 闭矢量 四边形 法 和 Ne tn aho 代 法建立 了该 绳 索驱 动 并联 w o —R p sn迭
时辅 以其 他绳 索用 于躯 干运 动 的测量 , 空间绳 索 布
置复 杂 , 本 昂贵 _ 。 成 4 J 本 文 结合 骨盆 的运动规 律 , 设计 了一套 重力 平
收 稿 日期 :0ห้องสมุดไป่ตู้1 1 2 2 1 ~1 —0
新型球面3rrr并联机器人的构建及其性能
结构设计
01
结构设计
新型球面3rrr并联机器人采用独特的三环三杆结构,具有高刚度、高精
度和良好的动态性能。通过优化设计,实现了轻量化、紧凑化的结构特
点,便于搬运和安装。
02
运动学分析
基于并联机器人运动学理论,对新型球面3rrr并联机器人的运动学特性
进行了详细分析。通过建立运动学模型,对其工作空间、奇异性、运动
新型球面3rrr并联机器人的构 建及其性能
汇报人: 2024-01-03
目录
• 新型球面3rrr并联机器人简介 • 新型球面3rrr并联机器人的构
建 • 新型球面3rrr并联机器人的性
能
目录
• 新型球面3rrr并联机器人的优 势与局限性
• 新型球面3rrr并联机器人在实 际应用中的案例
01
新型球面3rrr并联机器人简介
材料加工
根据结构设计的要求,对所选材料进行精密加工,确保各部件的尺寸和形位公 差符合设计要求。对于关键承重部件,采用先进的热处理工艺以提高其机械性 能。
制造工艺
制造工艺
采用先进的数控加工中心进行精密加工,确保各部件的制造 精度。关键承重部件采用焊接工艺进行组装,以提高整体结 构的稳定性。在装配过程中,采用高精度测量仪器进行检测 ,确保机器人的装配精度。
汽车工业
可以用于汽车车身焊接、零部 件装配等生产线上,提高生产 效率和产品质量。
医疗器械
由于其高精度和高稳定性的特 点,可以用于手术机器人、康 复机器人等领域,提高医疗服 务的水平。
其他领域
新型球面3rrr并联机器人还可以 应用于智能制造、物流运输、 服务等领域,具有广泛的应用 前景。
02
新型球面3rrr并联机器人的构建
刚柔耦合动力学———轻量化协作机器人设计与控制的力学基础———解读机器人刚柔耦合动力学

第29卷第24期中国机械工程V o l .29㊀N o .242018年12月C H I N A M E C HA N I C A LE N G I N E E R I N Gp p.3020G3023导语传统机器人采用厚实的结构来保证其具有足够的刚度,以减小机器人的结构振动,但是这种 粗笨 结构的机器人存在高能耗㊁适应性差等问题.为了提高机器人的节能性,要对机器人的结构进行轻量化设计,但轻量化设计又会导致其柔性结构振动,这就需要对机器人进行动态控制,以提高其动态刚度来减小结构振动.另外,能感知人协作意图㊁适应环境与目标变化的机器人因具有柔顺结构而适应性能良好,也存在柔性结构振动的可能.因此,利用柔性结构带来轻量节能与适应能力的前提是减小柔性结构振动,这需要研究柔性结构的动态控制,这些动态控制的力学基础都是刚柔耦合动力学.刚柔耦合动力学 轻量化协作机器人设计与控制的力学基础解读«机器人刚柔耦合动力学»尹海斌武汉理工大学湖北省数字制造重点实验室,武汉,430070收稿日期:201808081㊀机器人技术的发展趋势1.1㊀背景与现状随着技术的发展㊁社会的进步,人们越来越意识到人与自然和谐相处的重要性,其中最重要的一条就是减少对大自然的索取与排放,为此,人们提出了工业发展的节能减排约束机制.机器人技术的发展也应该遵循这一工业化发展的大趋势,向节能化方向发展.另外,随着用工成本的上升㊁社会老龄化的加剧,机器人越来越被看好,它是一个可以替代人工去做很多繁重和重复性工作的工具;要提高机器人的人工替代率,机器人必须具有一定的智能.因此,节能与智能是机器人技术发展的两大趋势.现有的绝大多数机器人结构设计是结构刚度最大化,以减小机器人结构的振动而实现精确的运动定位.但是,这种最大化刚度结构的机器人用材多㊁不经济,结构笨重不节能,惯量大而动态性能差,生产效率低.况且,不存在绝对的刚性结构,一定条件的输入会激励出一定频率的振动,即使设计成最大化刚度结构,机器人在高速重载的工作条件下同样面临着结构振动的问题.因此,要提高机器人运动的精度(降低柔性结构振动),往往会以牺牲其性能指标(节能经济㊁动态性㊁效率㊁工作条件)为代价.机器人大量应用于工农业生产,但其人工替代率仍不足1%,这是因为机器人还不能够如人一般自主适应外界环境和目标的变化,进行自主安全的运动和操作.柔顺结构或柔顺关节具有很好的适应性能,能够适应环境和目标的变化,能够感知操作者的动作意图,但同时也会存在结构振动从而带来运动控制精度的问题.柔性机器人轻量节能,对环境和目标的变化具有适应性,但也存在因为结构刚度较低而导致的结构振动的问题.要想充分利用柔性结构的优点,关键是要解决柔性结构带来的振动问题.为此,国内外许多研究人员对柔性机器人的各种关键技术进行了大量研究.1.2㊀发展概述对柔性机器人关键技术的研究就是对其共性问题刚柔耦合动力学综合问题的研究.首先,需要建立一个能代表真实系统的精确模型来预测分析其动态行为.在这一研究领域,有大量的关于柔性臂动态建模与分析的研究,D w i v e d y 发表了一篇这个领域的评论文章,分析了1974-2005年间的主要研究成果.根据这些已发表的研究论文,用于计算柔性机器人动力学的柔性描述方法可以归纳为3种.最常见㊁应用最广泛的方法是线性的弹性变形描述,大量的文献中都采用了这种最常见的线性描述方法来建立柔性机器人的动力学模型.近20年来,也有一些研究论文讨论了二次变形描述方法,它考虑了轴向缩短和横向弯曲;在连续柔性结构的离散计算中,二次变形描述中只有横向弯曲被认为是柔性位移.2005年,L e e 提出了一种新的变形描述方法推导柔性梁的动态方程,这个新的变形描述方法基本上等效于二次变形描述方法,不同的是横向弯曲与轴向缩短被综合为一个向量来用作柔性位移.这个新方法很少被用于柔性机器人的动态建模与分析,«机器人刚柔耦合动0203力学»(下称 本专著 )中详细讨论了如何用这个方法建立柔性机器人动态模型.除此之外,柔性机器人的动态控制也是一个很重要的研究课题.在过去的数十年中,许多研究人员对柔性机器人的动态控制进行了研究.2004年,B e n o s m a n 提出了柔性机器人动态控制的综述文章,分析总结出4类目标和20种方法(表1).这些动态控制方法一般基于具体的柔性机器人动态模型与分析,因此,采用上述新的变形描述方法建立柔性机器人动态模型,需要研究与之相应的动态控制器设计方法.这些相关的研究成果是机器人刚柔耦合动力学发展过程的体现,也是本专著的主要内容.表1㊀柔性机器人动态控制目标与方法4类控制目标20种控制方法(1)无时间限制的点到点运动(2)有时间限制的点到点运动(3)关节空间内的轨迹跟踪(4)工作空间内的轨迹跟踪前馈轨迹规划输入整形技术,优化轨迹规划主动控制P D /P I D 控制,二次型最优控制,滑模变结构控制,奇异摄动控制,逆动态控制,力矩控制被动控制控制G结构优化设计,耦合结构智能控制神经网络控制,自适应控制,鲁棒控制,基于动态反馈的精确线性化特殊控制方法边界控制,机械波法,代数控制,输出再定义,超前滞后控制,极点配置2㊀«机器人刚柔耦合动力学»主要内容2.1㊀内容涵盖范围机器人种类繁多,从构型上看,可以归纳为机器人手臂㊁移动机器人以及人形机器人.机器人手臂又分为串联式和并联式,移动机器人可分为陆地移动型和空中飞跃型,人形机器人是前两者的集大成,是可以移动的机械臂或四肢.因此,在机器人构型研究中,机械臂和移动机器人是典型的代表.本专著中所介绍的机器人也主要指这两类机器人,其结构中采用了柔性单元,分别为柔性机械臂和柔性悬挂移动机械臂.2.2㊀内容介绍表2详细列出了本专著的主要内容,包括3个部分和8个章节.第一部分是概述,介绍了机器人动力学研究的意义;第二部分主要介绍柔性机械臂的研究成果,共四章;第三部分主要介绍柔性悬挂移动机械臂的研究成果,共三章.为了便于读者对专著有一个大致了解,下面主要对柔性机械臂与柔性悬挂移动机械臂的研究内容及研究关系做一个介绍.表2㊀«机器人刚柔耦合动力学»主要内容概述(1)机器人动力学研究意义柔性机械臂(2)刚柔耦合机械臂的建模与分析(3)刚柔耦合机械臂动态控制器设计(4)刚柔耦合机械臂动态控制仿真与实验(5)旋转刚柔耦合系统动力学建模方法的比较研究柔性悬挂移动机械臂(6)悬挂轮式移动机械臂的振动控制(7)多要素作用下的移动机械臂跟踪控制(8)路面激励下移动机械臂的动态稳定性控制㊀㊀本专著中,柔性机械臂的研究成果主要涉及柔性机械臂的动态建模与分析㊁动态控制与实验㊁建模方法的比较研究等内容.柔性机械臂建模时,采用了一种新的变形描述方法计算柔性变形.在模型分析计算时,一种情况认为,柔性臂关节轨迹的角度函数与其柔性状态之间保持独立;另外一种情况认为,驱动关节刚度不足时,柔性臂关节轨迹的角度函数将会受到其柔性状态的影响.因此,前者不用考虑关节柔性,后者需要考虑关节柔性.上述动态模型分析指出,柔性臂的动力学模型是一个强非线性系统且系统惯量矩阵的逆存在奇异.为了避免计算惯量矩阵的逆时出现奇异,并减小高阶复杂模型的计算难度,全阶的动力学模型被分解为一个柔性子系统和一个刚性子系统.基于这两个动力学子系统,提出了一个分解的动态控制方法,它由柔性动态控制模块(F D C )和刚性动态控制模块(R D C )组成.F D C 模块旨在寻找期望的轨迹,尽可能减小激励振动;R D C模块的任务则是跟踪期望的轨迹并补偿不确定的动态.控制器设计后,实验证明了分解的动态控制是有效的.前期的研究表明,柔性机械臂动态模型仍不够准确,会造成动态控制器的设计更加复杂.为了更加准确地预测动态行为㊁降低动态控制的设计难度,建立一个更加准确的柔性机械臂动态模型是非常必要的.通过柔性机械臂动态建模方法的比较研究发现,建模中采用的柔性梁边界条件比柔性变形描述方法对柔性机械臂动态模型的精度影响更明显;研究提出了一种用于精确建立柔性机械臂动态模型的边界条件的辨识方法.另外,柔性悬挂移动机械臂的研究成果涵盖柔性悬挂移动平台振动控制㊁移动机械臂轨迹规划㊁移动机械臂稳定性研究等内容.柔性悬挂移动平台振动控制研究了两种情况下的问题:一是机械臂静止而柔性悬挂平台运动时,最优的多输入整形法能有效抑制振动;二是机械臂和柔性悬挂平台都运动时,混沌粒子群优化1203 刚柔耦合动力学 轻量化协作机器人设计与控制的力学基础 解读«机器人刚柔耦合动力学»尹海斌算法可以通过寻找时间与加加速度的综合最优路径来有效地减小振动.柔性悬挂移动机械臂的轨迹追踪问题考虑了多种因素:理想的轮子纯滚动,非理想的轮子滑动,柔性悬挂移动平台与机械臂之间的相互作用.为了让多要素作用下移动机械臂的动态控制器都能精确地追踪轨迹,使用了模糊补偿器来减少不确定性因素的影响.为了解决柔性悬挂移动机械臂在通过不平路面时的稳定性问题,提出了一种半主动的变阻尼器,建立了与半主动悬架的变量相关的振动微分方程,最后得出封闭形式的移动机器人稳定性计算方法,并通过引入机器人小车的重量与不平路面引起的重心位置变化量,对动态稳定性计算方法进行了改进.3㊀机器人刚柔耦合动力学研究的科学意义3.1㊀刚柔耦合动力学研究的本质问题刚柔耦合动力学的研究包罗万象,但本质上是柔性机器人系统动力学综合优化问题.为了理解其研究的意义,我们首先来回顾一下动力学的概念及其任务.动力学源于力学的研究,它是理论力学的分支学科,主要研究物体的运动与力之间的关系.后来,动力学的概念被引申用于更多学科的研究,出现了系统动力学的概念:系统动力学主要研究系统输入与系统状态之间的关系.比如经济动力学,海洋环流动力学㊁气象动力学及生物动力学等.可见,动力学不再局限于物体的运动与力之间的关系,而是一个应用广泛的概念.图1所示为机电系统动力学问题的一般描述,在一个系统上有一定的输入作用,就会有一定的输出响应.系统的输入㊁输出及系统本身是一个系统动力学的三要素.系统动力学的研究就是对这三个要素进行研究.图1㊀机电系统动力学三要素动力学三要素对应动力学的3个任务.如图2所示,当系统未知或待求解时,需要进行系统建模或者系统辨识(m o d e l i n g o r i d e n t i f i c a t i o n ),这是第一个研究任务;当系统输出未知或需要分析系统输出状态时,需要进行系统仿真(s i m u l a t i o n )研究;当系统输入未知㊁需要确定输入时,需要研图2㊀系统动力学三任务究系统动态控制问题(c o n t r o l).对于较高要求的机电系统设计,这3个任务是相互关联的,需要整体考虑.假定某一系统动力学模型可描述如下:M (s ,K ,X )=u其中,u 和X 为系统输入和输出状态;s 和K 为结构参数和动态控制参数.在系统输入u 的作用下,有输出状态X 的响应,该响应将受到结构参数s 与控制参数K 的影响.要想获取期望的输出响应,可以设计输入u ㊁结构参数s 和控制参数K ,三者之间是相互关联的.例如,机械臂系统设计中,期望的性能指标是要求快速并精确定位,结构轻量化设计(调整结构参数s )能提高快速性,但这又会导致刚度不足,降低定位精度.我们可以通过规划输入轨迹u 来减小激励振动,或者调整反馈控制参数K 来抑制振动.因此,柔性机器人动态控制实质上是一个统筹考虑机械臂动力学的输入㊁系统结构和反馈参数的综合优化问题,涉及到机器人动力学的建模㊁分析与控制等内容.3.2㊀机器人刚柔耦合动力学研究的意义机器人刚柔耦合动力学的研究有助于我们理解如下几类工程实践问题.对于刚性机械臂,追踪期望的轨迹时,基于动力学模型的位置控制能够提高轨迹跟踪的实时性和精度,通过内环力矩控制模式实现外环轨迹的跟踪(图3a).对于柔性机械臂,比如轻型机械臂㊁细长机械臂㊁高速重载机械臂等都属于柔性臂的范畴,它们都面临柔性结构振动的共性问题.对柔性臂进行研究就是要研究如何减小柔性结构振动㊁提高机械臂的动态性能.我们可以把这些研究归纳为两类问题:一类是性能提升(图3b ),主要是针对现有的机械臂,通过反馈控制提高机械臂动态刚度来减小因系统输入性能的提升而出现的结构振动,比如要提高某一机械臂的工作速度或负载质量;另一类是轻量优化设计(图3c),就是利用现2203 中国机械工程第29卷第24期2018年12月下半月代设计方法,依据动力学模型,设计满足约束条件和目标要求的轻型机械臂.因此,柔性机械臂动力学研究的意义在于:能够提高机械臂的轻量化程度㊁提高工作空间范围㊁提升工作性能等.对于移动机器人,纯刚性设计会出现较差的平顺性能和较弱的环境适应能力,因此,要提升移动机器人的平顺性和对环境的适应性,就要有针对性地设计具有柔顺机构的移动机器人,研究柔顺机构移动机器人平台的刚柔耦合动力学问题,确定其结构刚度与动态刚度的关系.这也可以归类为图3c中的优化设计问题.在人机动态交互过程中,刚性关节不能感知交互意图;利用机器人柔顺关节对力矩敏感的特征能够感知人机交互的意图,但是柔顺关节在运动过程中也会存在柔性结构振动的问题(图3d),协作机器人柔顺关节的阻抗控制需要跟踪力矩目标和振动控制.总之,机器人刚柔耦合动力学的研究能够提升机器人的动态性能和适应能力,具有重要的科学意义和工程实践价值.4㊀结语«机器人刚柔耦合动力学»一书对柔性机器人的建模㊁仿真与动态控制等方面的内容作了较全面的分析和介绍,主要介绍了两种典型的机器人:柔性机械臂和柔性悬挂移动机械臂.柔性机械臂的研究内容有刚柔耦合动力学建模方法㊁动力学分析与动态控制器设计,这些研究为机械臂的振动控制提供了理论与方法.柔性悬挂移动机械臂的研究内容有柔性悬挂移动机器人振动控制方法㊁多要素作用下移动机械臂的跟踪控制和路面激励下移动机器人的动态稳定性控制,这些方法为柔性悬挂移动机器人动态控制奠定了理论基础.图3㊀机器人刚柔耦合动力学研究原理图作者力图总结在机器人刚柔耦合动力学研究领域取得的一些研究成果.这些研究成果的总结能够为提高机器人的性能与品质提供理论基础和实践方法,使读者能够借鉴并用于机电设备的减振降噪㊁机器人的精确控制和性能提升㊁机械臂的轻量优化设计㊁细长等特种机械臂的设计㊁柔顺平台的开发和人机协作机器人柔顺关节的动态控制等方向.该书可以作为机械工程㊁自动化与控制工程等相关学科方向的教师㊁研究人员的参考资料,也可以作为机器人技术领域的广大工程技术人员,特别是产品开发技术人员学习和工作的参考书.(编辑㊀王旻玥)作者简介:尹海斌,男,1979年生,副教授㊁博士.«机器人刚柔耦合动力学»第一作者.3203刚柔耦合动力学 轻量化协作机器人设计与控制的力学基础 解读«机器人刚柔耦合动力学» 尹海斌。
并联机器人 核心零部件
并联机器人核心零部件并联机器人是一种由多个独立的机器人组成的系统,每个机器人都有自己的核心零部件。
这些核心零部件是机器人的关键组成部分,决定了机器人的性能和功能。
一、传感器传感器是并联机器人的核心零部件之一,用于感知环境和获取外部信息。
常见的传感器包括视觉传感器、力传感器、触觉传感器等。
视觉传感器可以通过摄像头或激光扫描仪捕捉图像信息,用于目标识别、位置定位等;力传感器可以测量机器人施加的力或受到的力,用于控制机器人的力量和力度;触觉传感器可以模拟人类的触觉感知,实现机器人与环境的交互。
二、执行器执行器是并联机器人的另一个核心零部件,用于执行任务和控制机器人的动作。
常见的执行器包括电机、液压缸等。
电机可以转换电能为机械能,驱动机器人的运动;液压缸则利用液压原理将液体的压力转换为机械能,用于控制机器人的力和速度。
三、控制系统控制系统是并联机器人的大脑,用于控制机器人的运动和行为。
控制系统由计算机、控制器、传感器和执行器等组成。
计算机负责处理传感器获取的数据,确定机器人的位置和姿态;控制器根据计算机的指令,控制执行器的动作,使机器人完成各种任务。
四、通信系统通信系统是并联机器人的重要组成部分,用于实现机器人之间的信息传递和协同工作。
通信系统可以通过有线或无线方式进行通信,实现机器人之间的数据共享和协同控制。
五、机构设计机构设计是并联机器人的核心之一,决定了机器人的结构和运动能力。
机构设计可以根据机器人的应用需求进行优化,例如,柔性机器人可以采用柔性材料和连杆结构,实现灵活的运动和变形;并联机器人可以采用多个执行器和传感器,并通过联动控制实现高度精确的运动和协同工作。
六、能源系统能源系统是并联机器人的动力来源,为机器人提供能量供应。
常见的能源系统包括电池、燃料电池等。
电池可以为机器人提供电能,适用于小型机器人或室内应用;燃料电池则利用化学反应产生电能,适用于长时间工作和大功率需求的机器人。
七、安全系统安全系统是并联机器人不可或缺的部分,用于保障机器人的安全运行和防止事故发生。
并联变胞机器人机构及新型移动 和绳驱动并联机器人的研究
并联变胞机器人机构及新型移动和绳驱动并联机器人的研究题目:并联变胞机器人机构及新型移动和绳驱动并联机器人的研究引言:随着科技的不断进步,机器人技术也在迅速发展。
并联机器人是一种能够同时运动多个关节的机器人,其高度灵活和精准的动作控制让它成为工业、医疗和军事领域的热门研究方向之一。
其中,并联变胞机器人机构及新型移动和绳驱动并联机器人引起了广大研究人员的关注。
本文将一步一步介绍这些机器人的研究进展和应用前景。
一、并联变胞机器人机构1. 概述并联变胞机器人是一种模拟生物细胞的运动原理和结构,以实现机器人的多自由度运动。
其机构包括骨架结构、变胞模块和控制系统。
2. 骨架结构并联变胞机器人的骨架结构由多个可变形单元组成,每个单元包括伸缩杆、关节和连接器。
这种结构使机器人能够像生物细胞一样实现形态变化和自适应运动。
3. 变胞模块变胞模块是并联变胞机器人的关键组成部分,它由可伸缩杆和可变长度的连杆组成,通过改变杆件长度来实现机器人的变形和自由度控制。
4. 控制系统并联变胞机器人的控制系统采用先进的传感器和算法,实现机器人的准确控制和自主导航。
通过模仿生物细胞的运动原理和行为规律,使机器人能够更好地适应复杂环境和任务。
二、新型移动和绳驱动并联机器人的研究1. 移动机制新型移动并联机器人采用专门设计的轮子或履带来实现移动,同时结合并联机构来增强机器人的灵活性和运动能力。
这种移动机制可以使机器人在复杂的地形中移动,完成各种任务。
2. 绳驱动机构绳驱动并联机器人是一种利用细绳或钢索来驱动机器人运动的机构。
它具有简单、轻巧和高效的特点,可以实现高速、精确的运动控制,并在狭小环境中具有良好的灵活性。
3. 应用前景新型移动和绳驱动并联机器人在工业自动化、救援和探索等领域具有广阔的应用前景。
在工业自动化中,机器人能够代替人工完成危险或重复性工作,提高生产效率和质量。
在救援和探索中,机器人能够进入危险环境进行搜救和勘测,保护人员安全。
Delta系列并联机器人研究进展与现状

二、现状
目前,Delta系列并联机器人的研究主要集中在机构设计、运动学和动力学 分析、控制策略和实验研究等方面。在机构设计方面,研究人员通过对Delta机 器人的结构和运动特点进行分析和优化,提出了多种新型的Delta机器人机构。 在运动学和动力学分析方面,研究人员利用计算机进行模拟和仿真,对Delta机 器人的运动性能和动力学特性进行了深入探讨。
一、研究背景
并联机器人的研究可以追溯到20世纪60年代,当时美国科学家 J.C.Mckinstry提出了一种基于并联机构的机器人设计方法。到了20世纪90年代, 随着计算机技术和机械制造技术的不断发展,并联机器人的研究和应用开始受到 广泛。Delta系列并联机器人作为一种常见的并联机器人,具有高速度、高精度 和高效率等特点,因此在现代工业中得到了广泛应用。
在控制策略方面,研究人员采用各种先进的控制方法,如PID控制、鲁棒控 制和自适应控制等,以提高Delta机器人的控制精度和稳定性。在实验研究方面, 研究人员对Delta机器人的各种性能指标进行测试和评估,以验证其在实际应用 中的效果。
此外,Delta系列并联机器人还在许多领域得到了应用,如装配、搬运、包 装和检测等。由于Delta机器人具有高速度和高精度等特点,因此在生产线上可 以大大提高生产效率和产品质量。例如,在电子制造领域,Delta机器人可以快 速准确地装配和搬运电子部件,从而提高生产效率和质量。在食品包装领域, Delta机器人可以高效地包装各种食品,从而提高生产效率和市场竞争力。
此外,Delta机器人的成本较高,对于一些中小型企业来说,引入Delta机器 人可能会增加生产成本。最后,Delta机器人的应用领域还需要进一步拓展,以 适应更多的生产环境和生产需求。
四、展望
2024年并联机器人市场分析现状

2024年并联机器人市场分析现状引言并联机器人是一种在机器人领域内逐渐崭露头角的技术,其具备高精度的运动控制能力和灵活多变的工作空间。
由于其在多个领域中的广泛应用,如制造业、医疗领域和服务行业等,使得并联机器人市场呈现出迅速发展的趋势。
本文将对并联机器人市场的现状进行分析,并探讨市场的发展趋势。
市场规模分析近年来,并联机器人市场呈现出良好的增长势头。
根据市场研究机构的数据显示,全球并联机器人市场规模在过去五年间以每年平均15%的速度增长。
预计到2025年,全球并联机器人市场规模将达到200亿美元。
应用领域分析制造业制造业是并联机器人市场的主要应用领域之一。
在制造业中,并联机器人可以实现高精度、高速度的零部件组装,提高生产效率和产品质量。
尤其是在汽车制造业和电子产品制造业中,并联机器人的应用已经取得了显著成果。
医疗领域并联机器人在医疗领域中也得到了广泛的应用。
例如,在手术领域中,通过使用并联机器人进行精细的手术操作,可以减小手术风险和创伤。
此外,医疗机器人还可以用于康复训练和辅助护理等方面。
服务行业随着人口老龄化问题的日益突出,服务行业对于并联机器人的需求也在增加。
并联机器人能够代替人工从事繁重、危险或重复性工作,如物流搬运、餐饮服务等。
这不仅提高了工作效率,还减轻了劳动力压力。
市场竞争格局分析并联机器人市场竞争格局相对较为集中,少数几家企业占据了市场的主导地位。
这些企业通常具备较强的技术研发实力和生产能力,在产品质量和性能上具备竞争优势。
此外,由于并联机器人技术的复杂性,进入门槛较高,新进入者在市场上的竞争力较弱。
市场发展趋势分析技术创新驱动市场发展随着科技的不断进步,新一代的并联机器人产品不断涌现。
新技术的应用,如人工智能、传感技术和虚拟现实等,为并联机器人市场带来了更多的机会和挑战。
技术创新将继续推动市场的发展。
个性化定制需求增加随着制造业的发展,个性化定制的需求日益增加。
并联机器人具备高度灵活性和可编程性,可以满足不同用户的个性化定制需求。
并联机器人简介介绍
医疗领域
并联机器人在医疗领域可用于 辅助手术、康复训练以及精确 的医疗设备定位等。
科研与教育
并联机器人还可用于科研机构 的实验研究以及教育领域的教
学和培训。
并联机器人的发展历程
初期探索
20世纪70年代,并联机器人概念开始萌芽,研究人员开 始探索其运动学和动力学特性。
技术突破
80年代至90年代,随着计算机技术和控制理论的发展, 并联机器人的设计、分析和控制技术取得了重要突破。
特点
高刚度、高精度、高负载能力、结构紧凑、动态响应快等。由于并联机器人的 这些特点,它们在许多领域都得到了广泛应用。
并联机器人的应用领域
制造业
并联机器人在制造业中用于高 精度装配、焊接、切割、打磨 等作业,提高生产效率和产品
质量。
航空航天
由于并联机器人具有高刚度和 高精度特点,它们在航空航天 领域被用于飞机和卫星的精密 装配与检测。
控制系统
并联机器人的工作原理基于先进 的控制系统,通过计算机或控制 器对各个关节进行精确的协调和
控制。
运动学逆解
在工作过程中,控制系统根据目 标位置和姿态,通过运动学逆解 算法计算出各个关节的需要到达
的位置。
动力学控制
控制系统根据机器人的动力学模 型,通过控制算法实现机器人平 稳、快速的运动,并确保机器人
并联机器人在汽车制造、重型机械等需要承受较大负载的行业中,能够发挥很好 的应用效果。
紧凑的结构设计
空间占用
并联机器人采用紧凑的结构设计,使得其在空间占用上相对 较小,有利于节省生产现场的空间资源。
灵活布局
紧凑的结构设计使得并联机器人能够灵活地适应各种生产布 局,提高生产线的整体效率和灵活性。
柔索牵引并联机器人的简介及发展概况
第一章绪论1.1 论文的研究背景及意义随着科学技术的发展以及人们对视频画面质量的要求不断提高,在进行电视转播时,经常需要摄影设备对空中全景进行拍摄,借助于摇臂摄像机、曲臂升降车和直升机航拍设备来完成上述任务是比较成熟的手段,但由于工作区域及拍摄角度等各种条件的限制,这些拍摄设备都不能很好的完成空中拍摄任务。
近年来,柔索牵引摄像机机器人的出现为上述问题提供了一个非常完美的解决方法。
柔索牵引摄像机器人在广场,大型演播室等三维空间内可达到无盲点旋动、悬停飞行等效果,从而为观众提供一场非同一般的视觉盛宴。
早在1983年就有学者提出柔索牵引摄像机器人的设计思想,不过受限于多根柔索间的协调运动控制与平台振动等方面的技术难题,柔索牵引摄像机器人的拍摄效果一直无法达到理想的要求,经过研究人员和相关领域学者的不断摸索与努力,直到最近几年这种摄像机器人才得到了广泛的应用[1-2]。
即使到现在,也很少见到关于摄像机器人机动性指标的最大速度、最大加速度、上升时间、运动变向响应时间等,以及关于稳定性指标的最大振幅、振动频率、调整时间等的深入研究报道,而仅仅是停留在最大运行速度为9m/s的运动性能的定量认识上[3-4],而这种运行速度相对于在两条平行空中索道上滑行的二维索道摄像机人的最大速度36m/s而言还是非常小的,基于此,如果能够更好的协调摄像机器人牵引索间的运动控制,提高驱动电机的转动精度以及减小其响应时间,柔索牵引摄像机器人的最大速度也还有提高的潜力。
目前该种柔牵引机构搭载摄像机系统有着广泛的应用前景,由于其自身的运动特性所带来的特殊视角能给观众带来前所未有的视觉体验,所以包括北京奥运会、南非世界杯、广州亚运会以及央视春晚等大型赛事的实况转播和综艺广播电视节目的录制都采用了该种产品类型的设备。
但是国内还未掌握其核心技术,一些大型运动会及综艺转播节目的主办方若需要用到此技术。
除了租用了国外的设备包括专业人员外并无他法,但是其价格高昂,不但增加了运营成本,而且在沟通协调方面也有诸多不便。
绳索牵引并联机器人的结构优化与参数标定
随着技术的不断进步,绳索牵引并联机器人的应用领域将 进一步扩展,如进入核电站进行维修和检查,进入管道进 行检测等。
性能评估方法
1 2 3
评价指标
评价绳索牵引并联机器人的性能主要包括精度、 稳定性、响应速度、操作灵活性等指标。
评估方法
采用实验方法,通过给定不同的操作任务,记录 机器人的完成任务情况,并对各项指标进行评估 。
结论
根据实验结果得出结论,为进一步优化绳索牵引并联机器人的结构和 参数标定提供依据。
06
结论与展望
研究成果总结
完成了绳索牵引并联机器人的设 计与建模,揭示了其运动学和动
力学规律。
提出了基于优化算法的结构参数 标定方法,显著提高了机器人的
运动性能和轨迹跟踪精度。
针对实际应用场景,进行了实验 验证和对比分析,证明了所提方
优化算法选择与实现
基于遗传算法、模拟退火算法、粒子 群优化算法等常见的优化算法,选择 适合绳索牵引并联机器人的优化算法 。
优化算法的实现过程应考虑算法的收 敛速度、鲁棒性和可解释性等因素。
根据机器人的性能指标和约束条件, 构建优化模型,并利用所选的优化算 法进行求解。
结构优化实验及结果分析
通过实验验证结构优化后的绳 索牵引并联机器人的性能,包 括运动学和动力学性能的评估 。
参数标定实验结果分析
结果对比
将实验结果与理论预测结果进行对比,分析误差产生 的原因。
精度评估
对机器人参数标定后的精度进行评估,分析不同参数 对精度的影响。
可重复性验证
对同一台机器人进行多次参数标定实验,验证实验结 果的重复性。
04
绳索牵引并联机器人控制策略
控制策略设计
基于牛顿-欧拉方程
多驱动模式冗余并联机器人设计、多体动力学与控制

性。
轻量化和微型化
追求更轻巧、更微型的机器人设计, 以适应更广泛的应用场景。
物联网和云技术
将物联网和云技术应用于机器人控制 ,以实现更高效的信息处理和更智能 的远程监控。
多体动力学与控制
深入研究多体动力学与控制理论,以 实现更精确、更稳定的机器人运动控 制。
机器人性能评估
运动性能
评估机器人的移动范围、速度、加速度等指 标,反映机器人的运动能力。
稳定性
评估机器人在遇到干扰或故障时的表现,以 及恢复稳定的能力。
定位精度
评估机器人对目标位置的精确程度,是衡量 机器人性能的重要指标之一。
能耗效率
评估机器人在运动过程中的能源消耗,反映 机器人的节能性能。
04 机器人优化与未来发展
航空航天
应用多体动力学模拟和分 析飞行器的运动,优化飞 行器的气动性能和飞行控 制。
多体动力学控制
控制理论
应用控制理论设计多体系统的 控制器,实现系统的稳定性和
鲁棒性。
反馈控制
应用反馈控制方法,根据系统的输 出反馈调整控制输入,实现系统的 精确控制。
优化控制
应用优化方法,寻找最优的控制输 入,实现系统的最优控制。
感谢您的观看
弹性力学
研究弹性物体在力和变形 之间的相互作用,考虑材 料非线性和几何非线性。
接触与碰撞
研究物体之间的接触和碰 撞,考虑能量损失和动量 变化。
多体动力学应用
机器人学
应用多体动力学方法设计 、分析和控制机器人的运 动,提高机器人的运动性 能和稳定性。
制造业
应用多体动力学模拟和分 析制造过程,优化工艺流 程和提高产品质量。
并联机器人综述

并联综述并联综述1.简介1.1 背景并联是指由多个机械臂以并联的方式连接在一起,通过共享载荷、合作操作的一种系统。
其具有高刚性、高精度、高承载能力等特点,被广泛应用于工业自动化领域。
1.2 目的本文旨在介绍并联的基本概念、结构组成、工作原理以及应用领域,以便读者能够全面了解并联的特点和优势。
2.结构组成2.1 机械臂并联的核心部件是机械臂,通常由多个关节组成。
每个关节都装有驱动器和传感器,用于控制机械臂的运动和感知周围环境。
2.2 连杆和连杆驱动系统机械臂之间通过连杆连接,连杆驱动系统用于控制连杆的运动,从而实现机械臂的协同运动。
2.3 控制系统控制系统是并联的大脑,通过控制算法和传感器反馈信号,实现对机械臂的精确控制。
3.工作原理3.1 平台运动并联的机械臂通过连杆和关节传递力和运动,实现平台的运动。
平台的运动可以是平移或旋转,取决于机械臂的结构。
3.2 协作操作通过控制系统的协调控制,多个机械臂能够实现协作操作。
例如,可以通过分担负荷的方式,提高的承载能力;或者通过协同动作,完成复杂的任务。
4.应用领域4.1 制造业并联在制造业中被广泛应用于装配、焊接、喷涂等工序,能够提高生产效率和产品质量。
4.2 医疗领域并联在医疗领域中被用于手术操作,具有高精度、稳定性好的优点,减轻了医生的劳动强度。
4.3 物流领域并联在物流领域中能够完成货物的搬运、分拣等工作,提高了物流效率。
4.4 其他领域并联还可以应用于航空航天、冶金、矿山等领域,发挥更多的作用。
5.附件本文档涉及的附件详见附件部分。
6.法律名词及注释6.1 并联:由多个机械臂以并联的方式连接在一起,通过共享载荷、合作操作的一种系统。
6.2 关节:机械臂上的可转动连接部件,用于实现机械臂的运动。
6.3 传感器:用于感知机械臂周围环境的装置,能够提供位置、力量、力矩等信息。
并联机器人简介

引言并联机器人具有高刚度、高承载能力、高速度、高精度等特性,在许多领域得到了成功的应用.并联机器人采用的是一种“知识密集”型机构,其性能分析和设计是一项复杂而极富挑战性的问题.由于并联机器人与串联机器人相比具有一些独特的性能,如刚度高、承载能力高、速度高、驱动电机在机架上而使活动构件的质量轻,因此引起了国际上长期的关注,并给予了大量的研究.1938 年,Pollard 提出采用并联机构给汽车喷漆;1949 年,Gough 提出用一种并联机构的机器( 即后来的Stewart平台机构) 检测轮胎;之后,Stewart把这种机构推广应用到飞行模拟器的运动产生装置,并把这种机构命名为Stewart 机构,现在“Stewart Platform”已成为并联机器人领域使用最多的名词之一.并联机器人的拓扑结构中包含了一个或几个闭环,其定义是:有一个或几个闭环组成的关节点坐标相互关联的机器人称为并联机器人.1979年,MacCallion 和Pham建议把一并联装置用于装配线上;1983年,Hunt系统地考查了各种并联机器人的可能运动,提出了并联装置的各种新结构形式;之后,这些并联结构得到了详细地研究,如Yang 和Lee、Mohamed 与Duffy、Fichter、, Merlet 以及Huang 分别研究了空间六自由度并联机器人的运动学、动力学和力控制;Gosselin 和Angeles 讨论了平面、球面三自由度并联机器人的优化设计问题;Lee 和Shah 研究了空间三自由度并联机器人的设计;Inoue 在平行四边形机构的基础上,提出了一种六自由度并联机器人.在并联机器人家族中,Stewart (或称Stewart-Gough) 平台机器人是应用最早而较广的并联机器人之一,从结构上看,它是由上平台(动平台)通过六个相同的运动链与下平台联接形成的,每个运动链含有一个联接下平台的球铰、一个移动副和另一个联接上平台的球铰,这组成了6-SPS结构系统,为了避免自转运动,很多设计者往往用万向铰来代替每个分支中的一个球铰.与传统的串联式机器人相比,并联机器人的特点为:驱动装置可以安放在或接近机架的位置;机器人的运动部分重量轻、速度高、动态性能好、精度较高;运动平台通过几个运动链与机架相联接,因此其结构紧凑、刚性好、承载能力高、能重比高;并联机器人往往采用对称式结构,其各项同性好;动力学特性较好,甚至在尺寸增大时仍保持好的动力学特性;并联机器人的运动学反解简单,正解较麻烦;并联机器人的操纵能力低、工作空间较小.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轻量化高效索驱动并联机器人装备
一、所属领域
高性能机器人+拣选、理料、包装和码垛等物流领域
二、项目介绍
1.痛点问题
在食品、医药、新能源、物流及3C等诸多行业,需要大量对产品进行高速拣选、理料和包装的机器人。
高速机器人已成为分拣和包装领域中提高效率、降低成本和提升质量的核心装备。
国际机器人巨头ABB和FANUC等引入并联构型,凭借基础零部件优势,开发的DeIta高速并联机器人一直处于市场垄断地位。
国产机器人的高性能伺服驱动和减速器等依赖进口,面临中低端锁定的困局。
面向轻量化和智能化的发展趋势、及日益复杂多样的生产需求,刚性机器人在性能方面存在效率低、成本高、功耗高等亟待突破的瓶颈。
2解决方案
本项目引入高性能索驱动技术,建立了刚柔融合构型创新设计方法,发明了一类具有高效率、低成本、低功耗和高精度特性的高速索驱动并联机器人,实现了索驱动与刚性支链的并联融合;建立了运动学和动力学性能评价指标体系,形成了从构型设计到性能匹配的一体化优化设计理论和方法,保证了机器人本体的优异性能;突破了轨迹规划和精度保证等关键技术,研发了基于开放构架的高性能控制软硬件平台,形成系列化机器人装备。
基于本项目技术可以建立系列化索驱动并联机器人产品,突破刚性机器人面临的瓶颈问题,极大降低装备成本,推动国产机器人性能和市场占有率提升。
3.竞争优势分析
D产品性能优异,行业首创:高速索驱动并联机器人产品经机械工业机器人产品质量监督检测中心检测,关键技术指标超越进口同类产品,且具有突出的成本和能效优势(成本降低40%-70%,功耗降低30%-40%,详见下表)。
目前尚无索驱动并联机器人产品。
2)轻资产运营,个性化定制:索驱动并联机器人产品加工和装配简单,便于开展模块化设计和构型动态重构,能够经济高效的形成针对具体工况的个性化产品。
3)理论储备扎实,技术先进:依托清华大学机械工程系索驱动机器人实验室,专注于索驱动机器人产品的创新研发和应用研究。
4.市场应用前景
机器人是智能制造的主力军,是国家科技创新能力的重要标志。
我国已成为全球最大的工业机器人需求国和市场,全球占比超过1/3,然而国产机器人的国内市场份额不足l∕3
o
国内并联机器人市场规模已近百亿,且快速增长。
并联机器人企业较少,竞争格局未定,带来创新机遇。
索驱动并联技术可以演化出丰富的高性能机器人产品,支撑我国工业和服务业的智能化转型。
5.发展规划
本项目已成立产业化公司,产品开始在电子企业应用。
计划通过与自动化集成商合作,推动高速索驱动并联机器人产品的大规模应用。
预计2023年进行一次融资,用于机器人产品的系列化和标准化量产。
6.知识产权情况
本项目核心发明专利3项,软件著作权3项,新申请专利4项。
索驱动并联技术的相关专利在持续申请中。
图1机构三维模型图2第四代工程样机及部分结构
图4第六代样机工业设计模型
三、合作需求
1)市场对接:自动化系统集成公司、分拣码垛需求迫切的大型企业集团;
2)资本对接:具有高端装备和智能制造背景的投资机构,引导产业链整合;3)技术合作:具备轻量化高速、超大空间重载、接触力控制等工况需求的企业,可与本团队合作攻关或共同申报、承接国家和省部级项目。
四、团队介绍
本项目负责人为清华大学机械系邵珠峰副教授,特别研究员(博导)、国家产业基础专家委员会委员、中国工程院强基战略系列研究特聘专家、中国机械工程学会高级会员、全国专业标准技术委员会委员。
主要从事高性能机器人装备及智能制造方面的研究工作,已发表SCl论文37篇,El论文32篇,获授权中国发明专利42项,软件著作权12项。
主持研发了大型民机整机智能涂装系统和大型船舶分段非结构面自动化涂装系统。
牵头建设数控金属切削机床远程运维系统,已发布智能制造相关国家标准6项。
曾获中国专利银奖、“中国仪器仪表学会科学技术奖”技术发明一等奖。
研究成果应用于多个国家级重大工程。
五、联系方式
E-mail:
成果编号:注:所有成果发布内容未经授权,请勿转载!
授权请联系。