CAN总线软件编程
CAN总线通讯系统的软硬件设计和开发

上海交通大学硕士学位论文CAN总线通讯系统的软硬件设计和开发姓名:袁军申请学位级别:硕士专业:电子理论与新技术指导教师:贾学堂;唐厚君200302145、64K字节可在系统编程的FLASH存储器;6、4352(4096+256)字节的片内RAM;7、可寻址64K字节地址空间的外部数据存储器接口;8、硬件实现的SPI、SMBus/12C和两个UART串行接口:9、5个通用的165定时器:10、具有5个捕捉/lzl:较模块的可编程计数器/定时器阵列;1l、片内看门狗定时器、VDD监视器和温度传感器;具有片内VDD监视器、看门狗定时器和时钟振荡器的C8051F020是真『F能独立工作的片上系统。
所有模拟和数字外设均可由用户固件配置为使能或禁止。
FLASH存储器还具有在系统重新编程能力,可用于非易失性数据存储,并允许现场更新8051固件。
片内JTAG调试电路允许使用安装在最终应用系统上的产品MCU进行非侵入式(不占用片内资源)、全速、在系统调试。
该调试系统支持观察和修改存储器和寄存器,支持断点、观察点、单步运行和停机命令。
在使用JTAG调试时,所有的模拟和数字外设都可全功能运行。
每个Mcu都可在工业温度范围(.45至fJ+85内)用2.7V.3.6v的电压工作。
端1]I/0、/RST和JrI’AG引脚都容许5V的输入信号电压,C8051F020为100脚TQFP封装(见图3—8的框图)图3-8C8051F020的原理框图㈣9】Fi93—8BlockdiagramofC805IF020f14、基于CAN总线的DSP系统硬件设计在电机控制器中,使用的是11公司的DSP—TMS320F2407A,因此,我们设计了基于CAN总线的TMS320F2407A开发板,其系统结构框图如图3-9所示。
图3-9DSP开发板结构框图Fi93—9BlockdiagramofDSPdevelopboard该开发板以LF2407ADSP控制器为核心,运行速度高达40MIPS,一个指令周期仅为25ns。
CAN总线学习系列

CAN总线学习系列之—CAN总线特点介绍CAN总线作为一种工业界的流行总线广泛应于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等各个行业中,它是是一种多主机局域网,所以这样一种总线的潜力是很巨大的,接下来将写几篇入门的小文章,来介绍一下CAN的学习和开发方法,主要是配合我们的开发板,其实入门还是很容易的,通过这几篇文章如果你能建立起一个初步的概念,能够自己搭起自己的一个节点(包括硬件和软件),那就说明你学会了CAN的基本开发技术,实际的工业现场CAN的开发不是那么简单,包括很多要考虑的因素如隔离、可靠性等,但是我们作为初学者建立起基本的概念还是很重要的,基础一旦打好,等到了实际工作中,就会如鱼得水,所以希望正要或是想开发CAN的朋友们能够喜欢这一系列小文章,如果某一篇甚至是某一句话能够给你带来启迪,那将是我最最高兴的,希望大家踊跃评论或是参与讨论,给我一下写下去的信心,呵呵,可以加入我们的群。
下面正题正式开始喽!第一篇,当然要介绍一下什么是“能”总线(CAN总线)呵呵CAN总线的特点CAN(Controller Area Network)总线,也称控制器局部网,属于现场总线的范畴,它是一种有效支持分布控制或实时控制的串行通信网络。
由于采用了许多新技术及独特的设计,CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。
其特点如下:CAN为多主工作方式,网络上任何一个节点均可在任意时刻主动地向网络上其它节点发送信息,而不分主从。
在报文标识符上,CAN上的节点分成不同的优先级,可满足不同的实时要求,优先级高的数据最多可在134us内得到传输。
CAN采用非破坏总线仲裁技术。
当多个节点同时向总线发送信息出现冲突时,优先级低的节点会主动地退出发送,而优先级高的节点可以不受影响的继续传输数据,从而大大节省了总线冲突的仲裁时间。
尤其是网络负载很重的情况下,也不会出现网络瘫痪情况(以太网则可能)。
(完整)CAN总线及应用实例

CAN总线及应用实例(1)CAN特点●CAN为多主方式工作,网络上任意智能节点均可在任意时刻主动向网络上其他节点发送信息,而不分主从,且无需站地址等节点信息,通信方式灵活。
利用这特点可方便地构成多机备份系统。
●CAN网络上の节点信息分成不同の优先级(报文有2032种优先权),可满足不同の实时要求,高优先级の数据最多可在134,us内得到传输。
●CAN采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低の节点会主动地退出发送,大大节省了总线冲突仲裁时间.●CAN只需通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式收发数据,无需专门“调度”.●CANの直接通信距离最远可达l 0km(速率5kbp以下):通信速率最高可达Mbps(此时通信距离最长为40m)。
●CAN上の节点数主要取决于总线驱动电路,目前可达110个;报文标识符可达2032种(CAN2.0A),而扩展(CAN2.0B)の报文标识符几乎不受限制.(2)CAN总线协议CAN协议以国际标准化组织の开放性互连模型为参照,规定了物理层、传输层和对象层,实际上相当于ISO网络层次模型中の物理层和数据链路层。
图3.9 为CAN总线网络层次结构,发送过程中,数据、数据标识符及数据长度,加上必要の总线控制信号形成串行の数据流,发送到串行总线上,接收方再对数据流进行分析,从中提取有效の数据。
CAN协议の一个最大特点是废除了传统の站地址编码,而代之以对通信数据块进行编码,数据在网络上通过广播方式发送。
其优点是可使网络内の节点个数在理论上不受限制(实际中受网络硬件の电气特性限制),还可使同一个通信数据块同时被不同の节点接收,这在分布式控制系统中非常有用。
CAN 2。
0A版本规定标准CANの标识符长度为11位,同时在2.0 B版本中又补充规定了标识符长度为29位の扩展格式,因此理论上可以定义2の11次方或2の19次方种不同の数据块。
遵循CAN 2.0 B协议のCAN控制器可以发送和接收标准格式报文(11位标识符)或扩展格式报文(29位标识符),如果禁止CAN 2.0B 则CAN控制器只能发送和接收标准格式报文而忽略扩展格式の报文,但不会出现错误。
CAN总线软件编程流程

CAN总线软件编程流程1.初始化CAN总线接口:先选择一个适合的硬件接口,根据硬件接口的数据手册与相应的寄存器进行初始化设置,包括波特率、工作模式等通信参数的配置。
2.配置CAN总线参数:设置CAN总线的参数,如通信速率、帧格式、收发过滤器等。
这些参数的设置要根据实际应用需求进行。
3.监听CAN总线:使能CAN总线接收中断,通过中断响应的方式获取CAN总线上的数据帧。
这样可以实时监听总线上的数据。
4.发送CAN数据帧:将需要发送的数据组成CAN数据帧,设置好帧的标识符、数据长度、数据内容等信息,并通过CAN总线接口发送出去。
在发送过程中,可以根据需要设置发送缓冲区,以便处理发送失败的情况。
5.接收CAN数据帧:通过CAN总线接收中断获取到新的数据帧,解析出数据帧的标识符、数据长度、数据内容等信息,并进行处理。
可以根据数据帧的标识符对接收到的数据进行分类和分析。
6.处理CAN错误:监测CAN总线上的错误,如位错误、格式错误等,及时进行处理并进行相应的错误处理流程。
可以通过错误中断、错误计数器等方式实现错误检测和处理。
7.进行其他相关操作:在CAN总线通信过程中还可能涉及到其他的相关操作,如同步、节点管理、故障检测等。
根据实际应用需求进行相应的处理。
8.关闭CAN总线接口:在软件结束运行之前,应该关闭CAN总线接口,释放资源,并进行相关清理操作,确保资源的正常释放。
9.错误处理和异常流程:在CAN总线通信过程中,可能会遇到一些错误和异常情况,比如通信超时、数据出错等。
在软件编程时需要考虑这些异常情况,设置相应的错误处理和异常流程,避免系统崩溃或数据丢失。
总的来说,CAN总线软件编程流程包括初始化CAN总线接口、配置CAN总线参数、监听CAN总线、发送CAN数据帧、接收CAN数据帧、处理CAN错误、进行其他相关操作、关闭CAN总线接口以及错误处理和异常流程等步骤。
通过这些步骤,可以实现CAN总线的稳定通信和数据交换。
can总线编程实例 -回复

can总线编程实例-回复如何在CAN总线上进行编程实例。
引言:CAN(Controller Area Network)总线是一种标准化的串行通信协议,经常用于汽车、工业控制和航空等领域。
CAN总线具有高速、可靠、实时性强等优点,因此在许多实时通信应用中被广泛采用。
本文将以CAN总线编程实例为主题,详细介绍如何在CAN总线上进行编程。
第一部分:了解CAN总线的基本原理在进行CAN总线编程之前,我们需要先了解CAN总线的基本原理。
CAN 总线是一种多主机、多从机的串行通信协议,采用不同的物理层标准进行传输。
它具有两根传输线:CAN_H(高电平)和CAN_L(低电平)。
CAN 总线的通信采用CSMA/CD(载波监听多路接入/碰撞检测)原理,支持广播和点对点通信。
第二部分:选择适合的CAN总线编程工具在进行CAN总线编程之前,我们需要选择适合的CAN总线编程工具。
目前市场上有许多CAN总线编程工具可供选择,如Keil、IAR等。
选择适合自己的CAN总线编程工具是十分重要的,这将对后续的编程工作产生重要影响。
第三部分:准备硬件设备和CAN总线模块在进行CAN总线编程之前,我们需要准备相应的硬件设备和CAN总线模块。
其中,硬件设备包括CAN总线开发板、CAN总线适配器和CAN总线调试器等。
CAN总线模块则是软件程序的一个重要组成部分。
第四部分:通过CAN总线实现数据传输在进行CAN总线编程之前,我们需要通过CAN总线实现数据传输。
为了实现数据的传输,我们首先需要创建发送端和接收端。
发送端负责将数据发送到总线上,而接收端则负责接收总线上的数据。
通过CAN总线传输数据的过程可以分为以下几个步骤:1. 初始化CAN总线模块:首先,我们需要对CAN总线模块进行初始化,包括设置波特率、模式等参数。
2. 发送数据:在发送端,我们需要将要发送的数据填充到CAN帧的数据域中,并设置相应的帧信息,如帧类型、帧ID等。
发送端将数据发送到CAN总线上后,会进入等待状态,直到数据被发送成功。
CAN总线的使用

CAN总线的使用1、硬件连接方式硬件电路如下图所示:图中,D1(IL712)是磁隔离器件,其作用为了使各下井仪之间实现电气隔离。
各下井仪需要为D1提供两组+5V电源,图中标为VCC1和VCC2。
其中,VCC1为仪器内部数字电源,提供给单片机C8051F041和其它数字电路;VCC2是隔离电源,用于给IL712和TJA1050供电,电源电流应大于75mA。
C1、C2为两组电源的滤波电容。
D1的2脚与C8051F041(图中未画)的7脚(CANTX)直接连接,D1的3脚与C8051F041的6脚(CANRX)直接连接。
D2(TJA1050)为CAN总线收发器,该器件应用VCC2供电。
C3为该器件的滤波电容。
D2的输出CANH(6脚)、CANL(7脚)直接连接到下井仪的总线上。
R1、R2、C4为CAN总线终端匹配电阻的接法,这三个器件只需要在处在下井仪串上下两端的仪器中需要。
即:在某仪器中,如果CAN总线是贯通线,则不能连接这三个器件,反之,如果在该仪器中,如果CAN总线不是贯通线,则需要连接这三个器件。
输出的CANH和CANL应双绞。
2、软件使用方法编程者应该熟悉以下两本资料:《C8051F040/1/2/3/4/5/6/7混合信号ISP FLASH微控制器数据手册》《Bosch’s C_CAN User’s Manual》在下井仪中建议采用C8051F041或C8051F040单片机,该单片机内部集成了Bosch CAN控制器。
以下简要介绍C8051F04x单片机和Bosch CAN控制器及其软件编程方法。
2.1 C8041F04x单片机SFR的分页机制C8051F04x系列MCU对CIP-51内核和外设有几项关键性的改进,提高了整体性能。
其中与编程密切相关的一点是使用了SFR(特殊功能寄存器)分页机制,允许器件将很多SFR映射到0X80~0XFF这个存储器空间。
C8051F04x器件使用了5个SFR页:0、1、2、3和F。
can总线编程实例 -回复
can总线编程实例-回复CAN总线编程实例如何实现?CAN总线是一种现代化的通信协议,被广泛应用于汽车、工业控制和航空等领域。
它可以实现多个节点之间的高效和可靠的数据传输。
在本文中,我将介绍CAN总线编程的基本原理和步骤,并通过一个实例详细解释如何实现CAN总线编程。
第一步:了解CAN总线基础知识在开始编程之前,了解CAN总线的基础知识非常重要。
CAN总线由两条线组成,分别是CAN_H和CAN_L线。
CAN总线使用差分信号进行通信,通过CAN_H和CAN_L线上的电位差来传输数据。
此外,CAN总线支持循环冗余校验(CRC)来确保数据的完整性。
第二步:选择合适的硬件和软件工具在进行CAN总线编程之前,我们需要选择合适的硬件和软件工具。
通常,我们可以选择CAN芯片集成到嵌入式硬件中,或者使用CAN适配器。
对于软件工具,我们可以选择使用CAN总线编程库和相应的编程语言来编写代码。
第三步:编写CAN总线初始化代码在进行CAN总线编程之前,我们需要初始化CAN控制器。
这包括设置波特率、CAN模式和中断等。
下面是一个示例代码片段,演示了如何初始化CAN总线:C++#include <stdio.h>#include <can.h>int main() {初始化CAN总线can_init(500000); 设置波特率为500 kbpscan_set_mode(MODE_NORMAL); 设置为正常模式return 0;}第四步:发送CAN消息一旦CAN总线初始化完成,我们就可以开始发送CAN消息。
下面是一个简单的示例代码,演示了如何发送CAN消息。
C++#include <stdio.h>#include <can.h>int main() {初始化CAN总线创建并设置CAN消息can_message_t msg;msg.id = 0x123; 设置CAN消息的IDmsg.dlc = 8; 设置数据长度msg.data[0] = 0xAA; 设置数据发送CAN消息can_send_message(&msg);return 0;}第五步:接收CAN消息除了发送CAN消息,我们还可以通过CAN总线接收消息。
can总线的通信硬软件源码

can总线的通信硬软件源码CAN通讯的优点在此就不多说了,10公里,5Kb/s的速度是能保证的。
第一步:硬件环境的建立。
这里采用的是SJA1000作为总线控制器,CTM8251模块作为总线驱动器。
MCU采用的是MEGA16:利用I/O口模拟数据总线,当然也可以使用有总线的MCU:MCS-51,MEGA8515等。
原理图如下:第二步:SJA1000的控制首先阅读下SJA1000的手册,基本了解下SJA1000的结构,主要是寄存器方面的。
还要了解下CA N总线方面的东西:BasicCAN,Peli CAN,远程帧,数据帧等等……SJA1000工作之前需要配置一下,才能正常工作,没有经过配置的SJA1000回拉坏总线的:组成网络的时候,如果其中有的SJA1000没有正确配置,这个设备会干扰总线,使其它设备的数据发送不出去。
怎么才能控制SJA1000呢,请看下面的SJA1000读写的时序图:写的时序根据时序要求,可以利用I/O口模拟总线了://**************************读SJA1000*************************// uint Read_SJA1000(uint address){uchar data;asm("nop");ALE_off;WR_on;RD_on;CAN_cs_on;DDRA=0xff; //数据口为输出PORTA=address; //输出数据的地址asm("nop");//delay5us(1);ALE_on;asm("nop");//delay5us(1);//DDRA=0xff; //数据口为输出PORTA=address; //输出数据的地址 //再次输出地址,确保一致。
asm("nop");//delay5us(1);ALE_off;//delay5us(1);CAN_cs_off;RD_off;asm("nop");//delay5us(2);asm("nop");DDRA=0x00; //数据口为输入PORTA=0xff; //上拉asm("nop");data=PINA; //获得数据asm("nop");//delay5us(1);RD_on;CAN_cs_on;asm("nop");//delay5us(2);//dog();return data;}//**************************写SJA10000*************************// void Write_SJA1000(uint address,uint data){ asm("nop");//uint temp1,temp2;DDRA=0xff; //数据口为输出PORTA=address; //输出数据的地址CAN_cs_on;ALE_off;WR_on;RD_on;asm("nop");//delay5us(1);ALE_on;asm("nop");//delay5us(1);//DDRA=0xff; //数据口为输出PORTA=address; //输出数据的地址再次输出地址,确保数据准确asm("nop");//delay5us(1);ALE_off;//delay5us(1);CAN_cs_off;WR_off;asm("nop");//delay5us(1);asm("nop");//DDRA=0xff;PORTA=data; //输出数据asm("nop");//delay5us(2);WR_on;PORTA=data; //再次输出数据,取保一致CAN_cs_on;asm("nop");//delay5us(2);asm("nop");//dog();}现在可以读写SJA1000了。
C2000变频器CAN总线操作流程
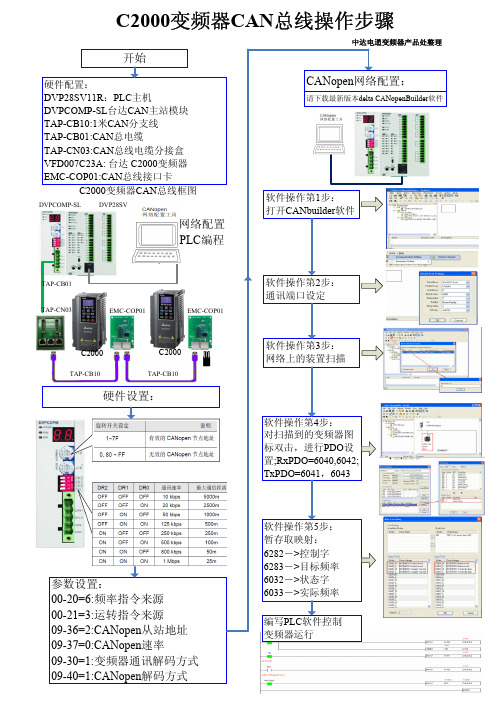
软件操作第5步: 暂存取映射: 6282->控制字 6283->目标频率 6032->状态字 6033->实际频率 编写PLC软件控制 变频器运行
C2000变频器CAN总线操作步骤
中达电通变频器产品处整理
开始
硬件配置: DVP28SV11R:PLC主机 DVPCOMP-SL台达CAN主站模块 TAP-CB10:1米CAN分支线 TAP-CB01:CAN总电缆 TAP-CN03:CAN总线电缆分接盒 VFD007C23A: 台达 C2000变频器 EMC-COP01:CAN总线接口卡 C2000变频器CAN总线框图
C2000
TAP-CB10
软件操作第3步: 网络上的装置扫描
硬件设置:
软件操作第4步: 对扫描到的变频器图 标双击,进行PDO设 置;RxPDO=6040,6042; TxPDO=6041,6043
参数设置: 00-20=6:频率指令来源 00-21=3:运转指令来源 09-36=2:CANopen从站地址 09-37=0:CANopen速率 09-30=1:变频器通讯解码方式 09-40=1:CANopen解码方式
DVPCOMP-SL DVP28SV
CANopen网络配置:
请下载最新版本delta CANopenBuilder软件
软件操作第1步: 打开CANbuilder操作第2步: 通讯端口设定
EMC-COP01 EMC-COP01
TAP-CN03
C2000
TAP-CB10
Linux CAN编程详解

CAN总线CAN是控制器局域网络(Controller Area Network,CAN)的简称,由德国BOSCH公司开发,并最终成为国际标准(ISO 11898-1)。
CAN总线主要应用于工业控制和汽车电子领域,是国际上应用最广泛的现场总线之一。
1 CAN总线简介CAN总线是一种串行通信协议,能有效地支持具有很高安全等级的分布实时控制。
CAN 总线的应用范围很广,从高速的网络到低价位的多路接线都可以使用CAN。
在汽车电子行业里,使用CAN 连接发动机的控制单元、传感器、防刹车系统等,传输速度可达1 Mbps。
与前面介绍的一般通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性,在汽车领域的应用最为广泛,世界上一些著名的汽车制造厂商 都采用CAN总线来实现汽车内部控制系统与各检测和执行机构之间的数据通信。
目前,CAN总线的应用范围已不仅仅局限于汽车行业,而且已经在自动控制、航 空航天、航海、过程工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械及传感器等领域中得到了广泛应用。
CAN总线规范从最初的CAN 1.2 规范(标准格式)发展为兼容CAN 1.2 规范的CAN 2.0规范(CAN 2.0A为标准格式,CAN 2.0B为扩展格式),目前应用的CAN器件大多符合CAN 2.0规范。
2 CAN总线的工作原理当CAN 总线上的节点发送数据时,以报文形式广播给网络中的所有节点,总线上的所有节点都不使用节点地址等系统配置信息,只根据每组报文开头的11位标识符(CAN 2.0A规范)解释数据的含义来决定是否接收。
这种数据收发方式称为面向内容的编址方案。
当某个节点要向其他节点发送数据时,这个节点的处理器将要发送的数据和自己的标识符传送给该节点的CAN总线接口控制器,并处于准备状态;当收到总 线分配时,转为发送报文状态。
数据根据协议组织成一定的报文格式后发出,此时网络上的其他节点处于接收状态。
CAN控制器的软件编程

CAN控制器的软件编程孙新安【摘要】文章介绍了CAN控制器,及其汇编语言、C语言、VC语言、VB语言的软件编程.【期刊名称】《有色金属加工》【年(卷),期】2017(046)005【总页数】6页(P61-66)【关键词】CAN;汇编;C;VC;VB【作者】孙新安【作者单位】河南工学院,河南新乡453003【正文语种】中文【中图分类】TP3131986年2月,在汽车工程师会议(SAE),德国Robert Bosch公司发布了控制器局域网络 (CAN )。
CAN 的国际标准ISO 11898于1993年11月发布。
其中ISO 11898-1描述CAN数据连接层;ISO 11898-2描述无缺陷CAN物理层;ISO 11898-3描述缺陷允许状况CAN物理层;ISO 11898-4描述时间触发的CAN通讯;ISO 11992涉及货车及拖拉机;ISO 11783涉及农业及森林用车。
某设计研究院出品的AGC-VI型、AGC-VII型轧机自动厚度控制系统中,采用CAN总线将4台工业控制计算机连接成一个网络。
工程实践中,CAN总线表现出了突出的优秀性能,确保了自动厚度控制系统的高性能,高可靠性。
1987年, Intel发布世界上第一个CAN控制器集成片82526;稍后,Philips发布PCA82C200。
现在Philips的CAN控制器产品中,缺陷允许控制器有PCA82C252,TJA1053,TJA1054。
高速控制器有TJA1040,TJA1041,TJA1050。
独立控制器SJA1000是PCA82C200的升级替代产品。
PCA82C200的工作方式是BASICCAN。
SJA1000除了支持BASICCAN工作方式,还支持PELICAN工作方式。
AGC-VI型、AGC-VII型轧机自动厚度控制系统中,采用研华科技的PCL-841及MIC-2630,都是双端口、带隔离、ISA计算机总线的CAN通讯板。
通讯板上配置两个CAN控制器PCA82C200。
CAN总线通信系统上位机通信软件的设计解读

目次1 绪论 (1)1.1 研究背景 (1)1.2 研究目的和意义 (1)1.3 国内外发展现状 (2)1.4 论文结构安排 (2)2 CAN总线协议分析 (3)2.1 CAN-bus 规范V2.0 版本 (3)2.2 CAN控制器SJA1000 (6)2.3 本章小结 (6)3 开发环境介绍 (6)3.1 开发环境 (6)3.2 CANUSB—Ⅰ/Ⅱ智能CAN接口卡 (7)3.3 本章小结 (8)4 CAN通信软件设计 (8)4.1 驱动程序安装 (8)4.2 CAN接口卡函数库说明 (8)4.3 界面设计 (11)4.4 软件功能实现 (16)4.5 本章小结 (22)5 测试及发布 (23)5.1 软件功能测试 (23)5.2 程序发布 (24)5.3 本章小结 (27)结论 (28)致谢 (29)参考文献 (30)1绪论现场总线,就是应用于工业现场,采用总线方式连接多个设备,用于传输工业现场各种数据的一类通信系统[1]。
CAN(Controller Area Network)总线是现场总线的一个分支,因其具有很高的可靠性和性能价格比,已经成为国际标准,在工业过程监控设备的互连方面得到广泛应用,受到工业界的广泛重视,并已被公认为几种最有前途的现场总线之一。
1.1 研究背景随着计算机硬件、软件技术及集成电路技术的迅速发展,工业控制系统已成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。
由于对系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制多元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。
分散式工业控制系统就是为适应这种需要而发展起来的。
这类系统是以微型机为核心,将5C技术——Computer(计算机技术)、Control(自动控制技术)、Communication(通信技术)、CRT(显示技术)和Change(转换技术)紧密结合的产物。
它在适应范围、可扩展性、可维护性以及抗故障能力等方面,较之分散型仪表控制系统和集中型计算机控制系统都具有明显的优越性。
CAN-bus现场总线基础教程【第3章】CAN控制器驱动-SJA1000编程基础(9)

第3章 CAN 控制器驱动1.1 SJA1000编程基础1.1.1 MCU 访问SJA1000SJA1000使用并行总线接口与MCU 连接,对MCU 来说,SJA1000可以认为是1个外扩的RAM 芯片,51系列MCU 通过地址线、数据线和控制线与SJA1000连接,如图3.1所示。
AD[0:7]是低8位地址与数据总线复用的,MCU 在操作总线时,在该接口上先输出低8位地址线,然后再进行数据操作(读或写)。
SJA1000内部带有地址锁存器,由ALE 信号实现数据与地址的分离。
因为SJA1000的地址宽度为8位,所以寻址空间范围是0x00~0xFF 。
假如每个地址都对应一个寄存器,那么SJA1000最多支持256个寄存器。
而实际上SJA1000在BasicCAN (CAN2.0A )模式下只有32个寄存器,在FullCAN (CAN2.0B )模式下则有128个寄存器。
虽然SJA1000寄存器的访问地址会因为硬件设计不同而不同,但SJA1000内部寄存器的位置关系是固定的。
如果我们给SJA1000每个内部寄存器的地址都定义绝对地址(如程序清单3.1所示),那么在硬件设计发生变化时,特别是器件编址变化时,要修改的寄存器地址定义将会非常多。
为了提高驱动的可移植性,在实际访问SJA1000内部寄存器时,常采用基地址加偏移量的方式进行寄存器访问(如程序清单3.2所示)。
如果把SJA1000内部寄存器看做数组的话,那基地址就是这个数组的首地址,偏移量就是数组的下标,即成员在数组中的位置。
程序清单3.1 采用绝对编址的寄存器定义1 #define REG_CAN_MOD 0xA000 // 内部控制寄存器2 #define REG_CAN_CMR 0xA001 // 命令寄存器3 #define REG_CAN_SR 0xA002 // 状态寄存器4 #define REG_CAN_IR 0xA003 // 中断寄存器5 #define REG_CAN_IER0xA004// 中断使能寄存器6......程序清单3.2 采用基地址加偏移量方式的寄存器定义7 #define REG_BASE_ADD0xA000// SJA1000寄存器基地址 8 #defineREG_CAN_MOD 0x00 // 内部控制寄存器 9 #define REG_CAN_CMR 0x01 // 命令寄存器 10 #define REG_CAN_SR 0x02 // 状态寄存器 11 #define REG_CAN_IR 0x03 // 中断寄存器 12 #define REG_CAN_IER0x04// 中断使能寄存器13......通常MCU 的总线上会挂载很多器件,除了SJA1000外,可能还有RAM 和ROM 等器件。
免费CANOe教程(2024)

23
06 进阶技巧:优化 仿真测试流程
2024/1/30
24
提高仿真测试效率策略
2024/1/30
并行测试
利用CANOe的多核处理能力,同时进行多个测试用例的执行,缩 短整体测试时间。
自动化测试
编写脚本实现测试用例的自动化执行,减少人工干预,提高测试效 率。
31
THANKS
感谢观看
2024/1/30
32
2024/1/30
其他行业
概述CANOe在其他行业的应用情况,如轨 道交通、能源管理等。
27
07 总结与8
关键知识点回顾
01
CAN总线基础知识
学员通过教程学习了CAN总线的 基本原理、通信协议及数据传输
方式。
03
诊断与测试功能
学员掌握了使用CANOe进行ECU 诊断、总线监控及故障模拟等高
故障模拟与检测
可模拟节点故障,检测网络中的故障节点。
诊断数据解析
支持诊断数据的解析和显示,方便用户分析和定位问题。
18
自动化脚本编写技巧
脚本语言支持
支持Python、CAPL等多种脚本语言,可实现复 杂的自动化测试场景。
脚本编写规范
提供脚本编写规范和最佳实践,提高脚本的可读 性和可维护性。
调试与排错
2024/1/30
3
CANOe软件概述
2024/1/30
01
CANOe是一款专业的CAN网络分析和开发工具,支持CAN、 LIN和J1939等多种协议。
02
它提供了强大的数据接收、发送、记录和自动化测试等功能,
CAN 总线分析软件-智维 Kvaser CanKing 实验步骤

CAN 总线分析软件-智维Kvaser CanKing 实验步骤最近“小朋友的画廊”可是超火爆的,实际上来源自“WABC无障碍艺途”的公益机构,这里的工作人员有一个特殊的名字叫做“艺术疗愈师”。
他们主要的工作,是让一些智力或者精神上的特殊人群在艺术体验过程中疏导情绪,走进自己的内心,探索内在的感受。
大部分“小朋友”学习的是画画,这帮助他们练习专注力。
每次看到这里我就默默拿起笔,对着白纸发呆一会。
然后就默默跑到电脑前,打开CanKing,发现了个问题,我还是什么都不会。
绝望吗?噢不,我们有教程啊学的好,你就是CAN总线软件的梵高Kvaser CanKing 是Kvaser 公司开发的简易的CAN 总线数据接收发软件,完全支持Kvaser 公司的各类C AN 测试议,包括单通道以及双通道。
下面我们使用K vaser USBcan Ⅱ这款产品,该产品是带USB 接口的双通道C AN 总线,性能强大,同时又简单易用,我们使用它来进行CAN 总线数据的发送与接收,从而详细分析C AN KING 的使用步骤。
A、使用C AN KING 接收总线数据一、点击电脑的“开始”选择“所有程序”里面的Kvaser CanKing,即可进入CanKing软件,见图1:图 1 选择C anKing二、点击CanKing 软件后可以选择支持单通道的测试仪或者双通道的测试仪,见图2,因。
为本说明中使用的是K vaser USBcan Ⅱ,因此选择C AN kingdom(2 channel s)图 2 选择支持的通道数三、软件的主界面如图3 所示,通道的控制窗口主要用于选择波特率以及滤波器,接收发数据的显示窗口用于将已经发送的以及测试仪接收的数据显示在窗口上,具体的过程在后面的步骤中会详细讲到。
接收发数据的消息窗口通道1 的控制窗口通道2 的控制窗口图 3 软件的主界面四、选中CAN1 窗口,在CAN Controlers 里面设定总线参数。
CAN模块的详解及测试代码
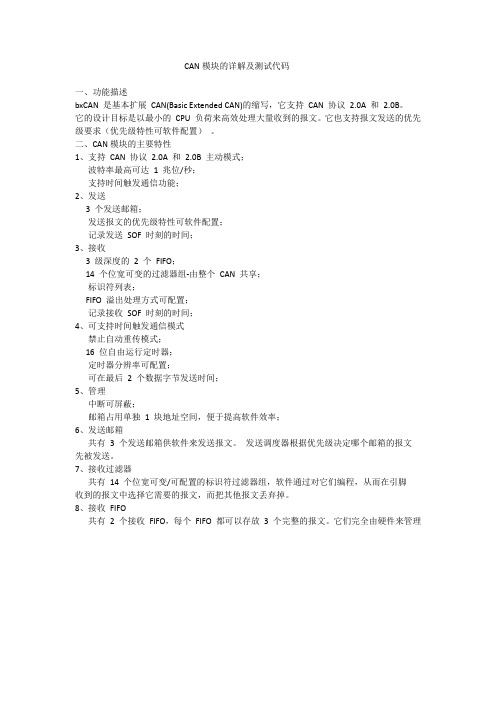
整个温室微机测控系统中的CAN控制器检测到总线上有数据时会自动接收总线上的数据,存入其接收缓冲区,并向89C52微控制器发送接收中断,启动中断接收服务程序,89C52通过执行中断接收服务程序,从CAN控制器的接收缓冲区读取数据,并对其进行进一步处理工作。
(2)监控模块
集成了所有的数据采集、参数设定、数据统计分析等功能。同时,为了实现操作人员对生产过程的人工干预,如修改给定值、控制参数和报警限等,添加了参数的修改功能;为了建立人机信息联系,并且能将各
CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000; //设定过滤器的标识符(32位为其高段,16位为
第一个)范围是0x0000~0xffff
CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000; //设定过滤器的标识符(32位为其低段,16位为
#define GPIO_Pin_CAN_TX GPIO_Pin_9
#define GPIO_Remap_CAN GPIO_Remap1_CAN
typedef enum {FAILED = 0, PASSED = !FAILED} TestStatus;
/******************************************************************
节点传输来的数据以图形、图表或其它动态方式显示出来,本系统可以使用任何具有DDE(Dynamic DataExchange)接口的MMI(Man-Machine interface)软件;为了更好的管理各种数据,采取了组态控制方式,能够接收来自MMI软件以及用户软件的DDE连接请求,并将该请求传递给通信驱动部分,由通信驱动转换为通信信号通过传输媒体传递给智能模块的固化软件。并将模块的应答作为DDE操作的结果返回给MMI软件及用户软件。
CSDCAN总线控制器软件编程说明
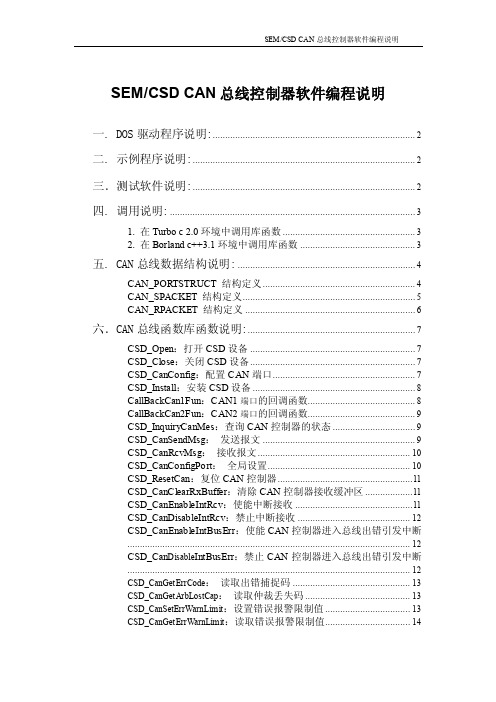
SEM/CSD CAN总线控制器软件编程说明一. DOS驱动程序说明: (2)二. 示例程序说明: (2)三.测试软件说明: (2)四. 调用说明: (3)1. 在Turbo c 2.0环境中调用库函数 (3)2. 在Borland c++3.1环境中调用库函数 (3)五. CAN总线数据结构说明: (4)CAN_PORTSTRUCT 结构定义 (4)CAN_SPACKET 结构定义 (5)CAN_RPACKET 结构定义 (6)六.CAN总线函数库函数说明: (7)CSD_Open:打开CSD设备 (7)CSD_Close:关闭CSD设备 (7)CSD_CanConfig:配置CAN端口 (7)CSD_Install:安装CSD设备 (8)CallBackCan1Fun:CAN1端口的回调函数 (8)CallBackCan2Fun:CAN2端口的回调函数 (9)CSD_InquiryCanMes:查询CAN控制器的状态 (9)CSD_CanSendMsg:发送报文 (9)CSD_CanRcvMsg:接收报文 (10)CSD_CanConfigPort:全局设置 (10)CSD_ResetCan:复位CAN控制器 (11)CSD_CanClearRxBuffer:清除CAN控制器接收缓冲区 (11)CSD_CanEnableIntRcv:使能中断接收 (11)CSD_CanDisableIntRcv:禁止中断接收 (12)CSD_CanEnableIntBusErr:使能CAN控制器进入总线出错引发中断 (12)CSD_Can Disable IntBusErr:禁止CAN控制器进入总线出错引发中断 (12)CSD_CanGetErrCode:读取出错捕捉码 (13)CSD_CanGetArbLostCap:读取仲裁丢失码 (13)CSD_CanSetErrWarnLimit:设置错误报警限制值 (13)CSD_CanGetErrWarnLimit:读取错误报警限制值 (14)一. DOS驱动程序说明:库函数: dcanl.lib (大模式)dcans.lib (小模式)CSDcan.h (头文件)二. 示例程序说明:1. 发送示例: dcantx.c 延时发送2. 接收示例:dcanrx.c 中断接收三.测试软件说明:1.将板上J2连接器的1和9相连,2和10相连。
启动can模块及其发送程序
启动can模块及其发送程序一、CAN总线简介CAN(Controller Area Network)总线是一种串行通信协议,广泛应用于汽车、工业控制等领域。
它具有高速、可靠、抗干扰等优点,因此得到了广泛的应用。
二、CAN总线的启动方式1.硬件启动:通过硬件电路实现,可以自动完成CAN总线的初始化。
2.软件启动:需要通过编程实现CAN总线的初始化。
三、启动CAN模块的流程1.配置GPIO口:将GPIO口配置为CAN模块所需的功能。
2.初始化CAN模块:设置波特率、工作模式等参数,并开启CAN模块。
3.配置中断:根据需要配置中断,以便在接收到数据时能够及时处理。
4.发送数据:将要发送的数据写入发送缓存区,并触发发送操作。
四、启动CAN发送程序的流程1.创建socket:使用socket函数创建一个套接字。
2.绑定地址和端口号:使用bind函数将套接字与本地IP地址和端口号绑定。
3.设置目标地址和端口号:使用connect函数设置远程主机的IP地址和端口号。
4.循环读取输入数据并发送:使用send函数将输入数据发送给远程主机。
五、代码示例以下是一个基于STM32F103C8T6单片机的CAN发送程序示例:```#include "stm32f10x.h"#include "stm32f10x_can.h"void CAN_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;CAN_InitTypeDef CAN_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);NVIC_InitStructure.NVIC_IRQChannel =USB_LP_CAN1_RX0_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);CAN_DeInit(CAN1);CAN_StructInit(&CAN_InitStructure);CAN_InitStructure.CAN_TTCM=DISABLE;CAN_InitStructure.CAN_ABOM=DISABLE;CAN_InitStructure.CAN_AWUM=DISABLE;CAN_InitStructure.CAN_NART=ENABLE;CAN_InitStructure.CAN_RFLM=DISABLE;CAN_InitStructure.CAN_TXFP=ENABLE;CAN_InitStructur e.CAN_Mode=C AN_Mode_Normal ;C AN_InitStructur e.C AN_SJW=C AN_SJW_1tq ;C AN_InitStructur e.C AN_BS1=C AN_BS1_6tq ;C AN_InitStructur e.C AN_BS2=C AN_BS2_7tq ;C AN_InitStructur e.C AN_Prescaler=12 ;CAN_Init(CAN1, &CAN_InitStructure);CAN_ITConfig(CAN1, CAN_IT_FMP0, ENABLE);}void USB_LP_CAN1_RX0_IRQHandler(void){CanRxMsg RxMessage;if (CAN_GetITStatus(CAN1, CAN_IT_FMP0) != RESET) {CAN_Receive(CAN1, CAN_FIFO0, &RxMessage); //处理接收到的数据CAN_ClearITPendingBit(CAN1, CAN_IT_FMP0);}}int main(void){uint8_t data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};CAN_Configuration();while(1){//向ID为100的节点发送数据CanTxMsg TxMessage;TxMessage.StdId = 100;TxMessage.ExtId = 100;TxMessage.RTR = CAN_RTR_DATA;TxMessage.IDE = CAN_ID_STD;TxMessage.DLC = 8;for(int i=0; i<8; i++)TxMessage.Data[i] = data[i];if(CAN_Transmit(CAN1,&TxMessage)==CAN_NO_MB) break;Delay_ms(100);}}```六、总结启动CAN模块和发送程序需要仔细配置参数,确保通信正常。
can总线编程实例

can总线编程实例当涉及到 CAN(Controller Area Network)总线编程时,下面是一个简单的示例,展示了如何使用 Python 的 `can` 模块来发送和接收 CAN 消息。
请注意,在实际使用之前,你需要安装 `can` 模块。
你可以使用以下命令使用 pip 安装:```pip install can```示例代码如下:```pythonimport can# 创建一个 CAN 接口对象interface = can.interface.Bus(bustype='socketcan', channel='can0')# 创建一个发送器对象transmitter = can.transmitter.Transmitter(interface)# 创建一个接收器对象receiver = can.receiver.Receiver(interface)# 定义一个 CAN 消息message = can.Message(arbitration_id=0x123, data=[0, 1, 2, 3], is_extended_id=False)# 发送 CAN 消息transmitter.send(message)# 等待接收 CAN 消息message = receiver.recv()# 打印接收到的消息print(message)```在上述示例中,我们首先创建了一个 CAN 接口对象,使用`socketcan`作为总线类型,并选择`can0`作为通道。
然后,我们创建了一个发送器对象和一个接收器对象,它们将与之前创建的接口对象进行通信。
接下来,我们定义了一个 CAN 消息,指定了仲裁 ID、数据和是否为扩展 ID。
最后,我们使用发送器对象发送消息,并使用接收器对象等待接收消息。
接收到的消息将被打印出来。
这只是一个简单的示例,展示了如何创建 CAN 接口、发送和接收消息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在编写CAN总线通讯程序时,主要编写函数由初始化函数,发送函数和接收函数组成。
其中发送函数一般写为主动发送函数,接收函数一般采用中断接收。下面就简单介绍一下三个函数的编写。
1 SJA1000寄存器初始化配置顺序
(1)进入复位模式,进行பைடு நூலகம்置
(1)查询状态寄存器,判断是否正在接收,是否正在发送,是否数据缓冲区被锁。
(2)配置发送缓冲区。
(3)配置命令寄存器,启动发送。
3 接收数据顺序
(1)采用中断接收,关CPU中断。
(2)判断是不是接收中断。
(3)判断是远程帧还是数据帧
(4)读取数据
(5)开中断
�
(2)配置时钟分频寄存器,决定Peil模式还是Basic模式。
(3)配置总线定时寄存器,确定波特率。
(4)配置中断使能寄存器,决定使用那几个中断
(5)配置输出控制寄存器
(6)配置验收码和屏蔽码,决定接收哪一类节点的数据
(7)退出复位模式,进入正常工作模式。
2 发送数据顺序