第六章 图像分割
合集下载
数字图像处理-第六章图像分割与分析
设平面上有若干点,过每点的直线族分别对应于极坐标上的 一条正弦曲线。若这些正弦曲线有共同的交点(ρ′,θ′),如图 (e),则这些点共线,且对应的直线方程为 ρ′=xcosθ′+ysinθ′
这就是Hough变换检测直线的原理。
y
A 60
B
F E
C
G 60
D 120
x
x-y空间的边缘点
D
120
C
w1 w 2 w3
可以指定模板为:
w
4
w5
w
6
w 7 w 8 w 9
9
模板响应记为: R | w i z i | i1
输出响应R>T时对应孤立点。
888 8 128 8 888
图像
-1 -1 -1 -1 8 -1 -1 -1 -1
模板
R = (-1 * 8 * 8 + 128 * 8) / 9 = (120 * 8) / 9 = 960 / 9 = 106
3、阈值分割法(相似性分割)
根据图像像素灰度值的相似性
通过选择阈值,找到灰度值相似的区域 区域的外轮廓就是对象的边
阈值分割法(thresholding)的基本思想: 确定一个合适的阈值T(阈值选定的好坏是此方法成败 的关键)。 将大于等于阈值的像素作为物体或背景,生成一个二值 图像。
f(x0,y0) T
2h
r2 2 4
exp
r2 2 2
是一个轴对称函数:
2h
-σ
σ
0
由图可见,这个函数 在r=±σ处有过零点,在 r │r│<σ时为正,在│r│>σ 时为负。
由于图像的形状,马尔算子有时被称为墨西哥草帽函数。 用▽2h对图像做卷积,等价于先对图像做高斯平滑,然后再用▽2对 图像做卷积。 因为▽2h的平滑性质能减少噪声的影响,所以当边缘模糊或噪声较 大时,利用▽2h检测过零点能提供较可靠的边缘位置。
视频监控与视频分析第六章 图像分割2

9 1. Find path from source to sink with positive capacity 2. Push maximum possible flow through this path 3. Repeat until no path can be found
2 1
v1
5
2
v2
Solve the dual maximum flow problem
Source
Compute the maximum flow between Source and Sink
9
Constraints Edges: Flow < Capacity
2 1
v1
5
2
v2
Nodes: Flow in = Flow out
0 1
v1
3
2
v2
0
Sink
Algorithms assume non-negative capacity
Maxflow Algorithms
Flow = 6
Source
Augmenting Path Based Algorithms
5 1. Find path from source to sink with positive capacity 2. Push maximum possible flow through this path 3. Repeat until no path can be found
(流值,容量)
(0,5)
v1 (6,10) v0 (0,3) (0,2) v5 (0,3) (0,4) v4 (0,5) (6,6) v2
例
(0,3)
2 1
v1
5
2
v2
Solve the dual maximum flow problem
Source
Compute the maximum flow between Source and Sink
9
Constraints Edges: Flow < Capacity
2 1
v1
5
2
v2
Nodes: Flow in = Flow out
0 1
v1
3
2
v2
0
Sink
Algorithms assume non-negative capacity
Maxflow Algorithms
Flow = 6
Source
Augmenting Path Based Algorithms
5 1. Find path from source to sink with positive capacity 2. Push maximum possible flow through this path 3. Repeat until no path can be found
(流值,容量)
(0,5)
v1 (6,10) v0 (0,3) (0,2) v5 (0,3) (0,4) v4 (0,5) (6,6) v2
例
(0,3)
Dip-6
p( z ) =
P 1 e 2π σ 1
−
( z − µ1 )2
2 2σ 1
+
P2 e 2π σ 2
−
( z − µ 2 )2
2 2σ 2
将该方程用于(6-1-1-1)得下列门限T的解:
AT 2 + BT + C = 0
其中
2 A = σ 12 − σ 2 2 B = 2 µ1σ 2 − µ 2σ 12
图像分割—门限法
将一个背景点当作目标点进行分类时,错误概率为:
E 1 (T
) = ∫− ∞
T
p 2 ( z )dz
将一个目标点当作背景点进行分类时,错误概率为:
E 2 (T
) = ∫T
∞
p 1 ( z )dz
出错率的整体概率是:
E (T ) = P2 E1 (T ) + P1 E 2 (T )
对E(T)求导并令导数为0,得
最优门限的选取 多数情况下,目标和背景的灰度分布有重叠。若二者的 灰度分布的概率密度函数已知,则可以选择门限使得错误概 率最小(统计最优)。
背景
图像中两个区域的灰度级概率密 度函数
目标
图像整体灰度级变化的总概率密度函数:
p ( z ) = P1 p 1 ( z ) + P2 p 2 ( z )
(P1和P2是两类象素出现的概率)
P p1 (T ) = P2 p2 (T ) 1
——(6-1-1-1)
解出的T即为最佳门限。如果P1=P2,则最佳门限位于P1(z)和P2(z) 的交点处。
图像分割—门限法
从T的表达式知,为了求取T,需要知道两个概率密度。在现实中 并不是总可以对这两个密度进行估计。通常的做法是利用参数化 模型。例如常考虑使用高斯密度:
数字图像处理 第6章 图像分割 北邮出版社 2008 10

T
表示3×3模板的不同方格上的加权值,
与模板紧扣着的图像上的像素灰度值为 X x1,x2,x3, ,x9 T ,
则上述求和的过程就可以看成是图像与模板的卷积过程, 相当于求模板矢量和图像矢量的内积。
W X 1 x1 2 x2 3 x3 9 x9 i xi
b
分别是目标和背景区域的均方差。
对式(6.10)求导数,有
T o
2 2 o
2
T b
2 b2
2
b ln (1 ) o
16
化简成标准的二次式,其系数为:
2 A b2 o 2 2 B 2 b o o b 2 2 2 2 2 2 C o b b o 2 b o ln o / (1 ) b
i z 1
K 1
K 1
C1类的均值为
1= i Pi 1
i z 1
10
图像的总平均灰度为:
=0 0 11
定义类间方差为:
2 2 =0 0 1 1
(6.5)
从最小灰度值到最大灰度值遍历所有灰度K,使得式(6.5)中
T n 1
9
设置阈值T,则检测到有别于周围像素的像素点为:
WT X T
25
把3×3模板推广到n×n模板,有:
W X i xi T
T i 1 nn
(6.30)
线检测模板如图6.9所示,它由多个不同的模板组成。 设W1、W2、W3、W4分别是图6.9中四个3×3模板的加权矢量,与模板紧扣 着的图像上的像素灰度为 X x ,x ,x , ,x T 1 2 3 9 则线模板的各个响应为 WiT X ,i=1,2,3,4。如果第i个模板响应最大,则可 以认为X与第i个模板最接近。或者说,如果对所有的j值,除j=i外,有:
第6章图像分割

2Gx,y
1 22
2 exp
x2 y2 22
1 x2 y2
x2 y2
24
2 2exp 22
▽2 G的平均值为零, 当它与图像f(x,y)卷 积时并不会改变图像 的整体动态范围,但 会使得图像平滑,其 平滑程度正比于σ。 因此能有效较少噪声 对图像的影响。
从频域角度来看,使用高斯函数卷积相当 于一个低通滤波过程,其后的拉普拉斯运 算相当于高通滤波过程,因此LOG算子 总体上为一个带通滤波过程。
6.1.1 阈值分割法基本原理
◆阈值化图像分割基本原理是选取一个或多 个处于图像取值范围之中的灰度阈值,然 后将图像中各个像素的灰度值与阈值进行 比较,并根据比较结果将图像中的对应像 素分成两类或多类,把图像划分成互不交 叉重叠的区域的集合,达到图像分割的目 的。
6.1.1 阈值分割法基本原理
0 0 255
0
Pi
i0
z
C0的数学期望为 0 k
iPi
i0
C0均值
z
0
iPi / 0
i0
K1
C1类的概率和为 1
Pi
i z1
C1的数学期望为 1 k
K1
iPi
i z1
C1均值
K1
1
iPi / 1
i z1
图像的总平均灰度为μ=ω0μ0+ω1μ1则 定义类间方差为
2
2
00
11
σ最大时的z就是最佳分割阈值T
σ越大表示两部分差 别越大,判错概率越
二、Canny算子
图像边缘检测的条件:
1、能够有效抑制噪声,具有较高的信噪 比,信噪比越大,检测的边缘质量越高;
2、必须尽量精确确定边缘的位置,要使 检测出的边缘在真正的边界上。
第六章 图像分割2012

6.2.2
1.根据直方图谷点选取
阈值选取方法
会受到噪声干扰,可以采用曲线拟合的方法来滤除噪声 干扰。
• 有些情况下,图像中目标和背景的灰度分布过于分散或者 它们的分布有部分交错,这使得图像直方图没有明显的双 峰一谷现象,很难找出合适的阈值。 • 可以采用统计学知识,在某种评价的标准下寻优,找出相 应意义下的最优阈值。
方法分类
• 分为基于区域特征的方法、基于边界特征的方法和基于相 关匹配的方法三大类。 • 基于区域特征的方法所依据的是灰度、颜色、纹理等某些 一定空间范围内的图像局部特征,在这些特征下目标和背 景区域内部具有一定程度的相似性; • 基于边界的方法认为不同区域之间往往在灰度上存在着较 快的过渡和跃变,因而会有一条或多条分界线存在,如果 能够找到这个边界,也可以实现分割; • 基于匹配的方法则根据已知目标的特征建立相应的模板将 特殊目标分离出来。
Canny算子
• 用高斯滤波器平滑图像; • 用一阶偏导的有限差分来计算梯度的幅值和方向; • • 对梯度幅值进行非极大值抑制。 • 用双阈值算法检测和连接边缘。
6.3.3 基于二阶导数法的边缘检测
•图像中的边缘也可以通过检测二阶导数 的过零点得到。 • 拉氏算子
拉氏算子是一种二阶导数算子,对图像 中的噪声相当敏感。而且它检测出的边 缘常常是双像素宽、没有方向信息。
LOG算子(高斯---拉普拉斯滤波器) 首先使图像f (x,y)与高斯函数卷积,然后再运用拉氏算子。
由于它的形状像个草帽,因此也称为“墨西哥草帽”
6.3.4 基于曲面拟合的边缘检测
• 基本思路是用一个平面或曲面去逼近图像中的局部灰度表 面,然后用这个平面或曲面的梯度代替点的梯度,从而实 现边缘检测。 (从而可以抑制噪声干扰)
数字图像处理-图像分割课件

差分定义:
xfi,jfi,jfi1,j yfi,jfi,jfi,j1
梯度算子 梯度是图像处理中最为常用的一次微分方法。
图像函数 fx,y在点 x, y 的梯度幅值为
f 2 x
fy2
其方向为 arctgf y
f x
图像经过梯度运算能灵敏地检测出边界, 但是梯度运算 比较复杂。
对于数字图像,可用一阶差分替代一阶微分:
非连续性分割: 首先检测局部不连续性,然后将它们 连接起来形成边界,这些边界把图像分以不同的区域。 这种基于不连续性原理检出物体边缘的方法称为基于 点相关的分割技术
两种方法是互补的。有时将它们地结合起来,以求 得到更好的分割效果。
人眼图像示例
分类—连续性与处理策略 连续性: 不连续性: 边界 相似性: 区域 处理策略: 早期处理结果是否影响后面的处理 并行: 不 串行: 结果被其后的处理利用 四种方法 并行边界;串行边界;并行区域;串行区域
n
(1) Ri
i1
(2)对所有的 i和j, i j, 有Ri R j
(3)对i 1,2,..., n, 有P ( Ri ) true (4)对i j, 有P ( Ri R j ) false (5)对i 1,2,..., n, Ri 是连通的区域
分类—分割依据
相似性分割: 将相似灰度级的像素聚集在一起。形成 图像中的不同区域。这种基于相似性原理的方法也称 为基于区域相关的分割技术
高斯拉普拉斯(LOG)
高斯拉普拉斯(Laplacian of Gaussian, LOG, 或 Mexican hat, 墨西哥草帽)滤波器使用了Gaussian 来进行噪声去除并使用 Laplacian来进行边缘检测
高斯拉普拉斯举例
xfi,jfi,jfi1,j yfi,jfi,jfi,j1
梯度算子 梯度是图像处理中最为常用的一次微分方法。
图像函数 fx,y在点 x, y 的梯度幅值为
f 2 x
fy2
其方向为 arctgf y
f x
图像经过梯度运算能灵敏地检测出边界, 但是梯度运算 比较复杂。
对于数字图像,可用一阶差分替代一阶微分:
非连续性分割: 首先检测局部不连续性,然后将它们 连接起来形成边界,这些边界把图像分以不同的区域。 这种基于不连续性原理检出物体边缘的方法称为基于 点相关的分割技术
两种方法是互补的。有时将它们地结合起来,以求 得到更好的分割效果。
人眼图像示例
分类—连续性与处理策略 连续性: 不连续性: 边界 相似性: 区域 处理策略: 早期处理结果是否影响后面的处理 并行: 不 串行: 结果被其后的处理利用 四种方法 并行边界;串行边界;并行区域;串行区域
n
(1) Ri
i1
(2)对所有的 i和j, i j, 有Ri R j
(3)对i 1,2,..., n, 有P ( Ri ) true (4)对i j, 有P ( Ri R j ) false (5)对i 1,2,..., n, Ri 是连通的区域
分类—分割依据
相似性分割: 将相似灰度级的像素聚集在一起。形成 图像中的不同区域。这种基于相似性原理的方法也称 为基于区域相关的分割技术
高斯拉普拉斯(LOG)
高斯拉普拉斯(Laplacian of Gaussian, LOG, 或 Mexican hat, 墨西哥草帽)滤波器使用了Gaussian 来进行噪声去除并使用 Laplacian来进行边缘检测
高斯拉普拉斯举例
数字图像处理与应用(MATLAB版)第6章 图像的分割

是边缘;
➢ 使用双阈值算法检测和连接边缘。即使用直方图计
算两个阈值,凡是大于高阈值的一定是边缘;凡是
小于低阈值的一定不是边缘。如果检测结果大于低
阈值但又小于高阈值,那就要看这个像素的邻接像
素中有没有超过高阈值的边缘像素,如果有,则该
像素就是边缘,否则就不是边缘。
0 -1 0 -1 4 -1 0 -1 0
B A
6.1 图像分割的定义和分类
图像分割:是指根据灰度、彩色、纹理等特征把图像 划分成若干个互不相交的区域,使得这些特征在同一区 域内,表现出一致性或相似性,而在不同区域间表现出 明显的不同。
图像分割的作用
图像分割是图像识别和图像理解的前提,图像分 割质量的好坏直接影响后续图像处理的效果。
图像
具体步骤:
➢ 首先用2D高斯滤波模板进行卷积以平滑图像;
➢ 利 用 微 分 算 子 ( 如 Roberts 算 子 、 Prewitt 算 子 和
Sobel算子等),计算梯度的幅值和方向;
➢ 对梯度幅值进行非极大值抑制。即遍历图像,若某
个像素的灰度值与其梯度方向上前后两个像素的灰
,
度值相比不是最大,那么这个像素值置为0,即不
第六章 图像的分割
内 容 1、图像分割的定义和分类; 提 2、基于边缘的图像分割方法;
要 3、基于区域的分割;
4、基于运动的图像分割 ; 5、图像分割技术的发展。
基
本 要
通过对图像分割技术的学习,掌
求 握基于边缘、区域、运动的图像
重
分割技术。
点
难 点
图像分割的定义、分类 基于边缘的图像分割方法
基于区域、运动的图像分割方法
G(i, j) Px Py
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六章
6.1 图像分割 引言 6.2 灰度阈值分割法 6.3 基于边界的分割 6.4 面向区域的分割
图像割
第六章
6.1 图像分割 引言
图像分割
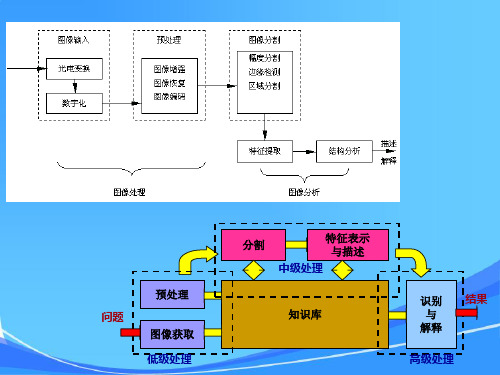
人类视觉在观察和分析一幅图像时,总是首先将注意力集中在图像中 的感兴趣的物体或区域,即将其从其他景物中分离开来,然后对其进 行特征分析,再根据其特征和大脑中对其的认识进行识别 。 计算机进行图像处理、识别的过程也是类似的过程,一个典型的图像 处理与识别过程如图所示。
1~ M
,第 i 级象素 ni 个,总象素 N = ∑ ni ,则第 i 级灰度 i =1 Pi = ni 。 N
C 0 = { ,2, L, k } 1
M
· 设灰度门限值为 k ,则图像像素按灰度级被分为两类:
C1 = {k + 1,L, M }
第六章
图像分割
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最大类间差(OTSU)
第六章
图像分割
6.3 基于边界的分割——不连续性——线的检测
线的检测 – 通过比较典型模板的计算值,确定一个点是否在某个方向的线上
-1 -1 -1 2 2 2 -1 -1 -1
水平模板
-1 -1 2 -1 2 -1 2 -1 -1
45度模板
-1 2 -1 -1 2 -1 -1 2 -1
垂直模板
2 -1 -1 -1 2 -1 -1 -1 2
第六章
6.1 图像分割 引言
图像分割
图像分割是按照某些特性(如灰度级,频谱,纹理等)将 图像划分成一些区域,在这些区域内其特性是相同的 或者说是均匀的,两个相邻区域彼此特性则是不同 的,其间存在着边缘或边界。 边缘 边界 图像分割从本质上来说是将图像中的象素按照特性的 不同进行分类的过程——像素分类。
可以用单一门限和多门限进行分割的灰度直方图
第六章
6.2 灰度阈值分割法——相似性
图像分割
通过直方图得到阈值 – 取值的方法: 取直方图谷底(最小值)的灰度值为阈值T – 缺点:会受到噪声的干扰,最小值不是预期的阈值,而偏离期望 的值; – 改进: 1)取两个峰值之间某个固定位置,如中间位置上。由于峰值代 表的是区域内外的典型值,一般情况下,比选谷底更可靠,可排 除噪声的干扰 2)对噪声的处理 对直方图进行平滑处理。
135度模板
图像
1 1 1 1 1 1 1 1 1 5 5 5 5 5 5 5 5 5 1 1 1 1 1 1 1 1 1
用4种模板分别计算 R水平 = -6 + 30 = 24 R45度 = -14 + 14 = 0 R垂直 = -14 + 14 = 0 R135度 = -14 + 14 = 0
第六章
第六章
6.1 图像分割 引言
图像分割的基本思路 1. 2. 3.
图像分割
从简到难,逐级分割 控制背景环境,降低分割难 度 把焦点放在增强感兴趣对 象,缩小不相干图像成分的 干扰上
第六章
6.1 图像分割 引言
图像分割
图像分割的基本思路 1. 从简到难,逐级分割 – 分割矩形区域 – 定位牌照 – 定位文字 2. 控制背景环境,降低分割难度 – 背景环境: 路面、天空 3. 把焦点放在增强感兴趣对象,缩 小不相干图像成分的干扰上 – 感兴趣的对象:汽车牌照 – 不相干图像成分:非矩形区域
第六章
图像分割
6.2 灰度阈值分割法——相似性-基本全局门限
(a)原图 (b)图像的直方图 (c) 通过迭代估计的门限 对图像进 行分割的结果
第六章
图像分割
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最大类间差(OTSU)
最佳全局和自适应门限 -包括 最大类间差(OTSU)算法和最小误差分割算法 · OTSU算法以最佳门限将图像灰度直方图分割成两部分,使两部分类间 方差取最大值,即分离性最大。 · 设图像灰度级 出现的概率为
第六章
6.2 灰度阈值分割法——相似性
图像分割
阈值分割法 – 阈值分割法的基本思想: • 确定一个合适的阈值 T(阈值选定的好坏是此方法成败 的关键)。 • 将大于等于阈值的像素作为物体或背景,生成一个二 值图像。 0 0 If f(x,y) ≥ T set 255 Else set 0 0 255
当 σ 12 = σ 22 = σ 2 时
T=
μ1 + μ2
2
+
σ2 μ2 − μ1
ln
θ
1−θ
(6-2)
T=
若先验概率已知,例如 : θ=1/2 时,有
μ1 + μ 2
2
(6-3)
这表示正态分布时,最佳阈值可按(6-2)、(6-3)式求得,若不是正态分布时, 则可用(6-1)式确定最小误差的阈值 。
第六章
6.1 图像分割 引言
图像分割
把图象空间按照一定的要求分成一些“有意义”的区域 的技术叫图象分割。 图象分割 例如: (1)要确定航空照片中的森林、耕地、城市区域等, 首先需要将这些部分在图象上分割出来。 (2)要辨认文件中的个别文字,也需先将这些文字分 选出来。
第六章
6.1 图像分割 引言
第六章
6.1 图像分割 引言
图像分割
图像分割是计算机进行图像处理与分析中的一个重要环节,是一种基 本的计算机视觉技术。 图像分割质量的好坏直接影响整个图像处理与分析系统的结果,关系 到目标识别与理解的成败,因此,图像分割的作用是至关重要的。 另外,图像的分割和目标的分离,用较少的数据量代表原始图像中的 目标,使得更高层的图像分析和理解成为可能。 图像分割的作用非常重要,多年来一直受到关注和重视,至今已提出 了上千种各种类型的图像分割算法,而且新的图像分割算法也在不断 的诞生。
第六章
6.1 图像分割 引言
图像分割
图像
图像预处理
图像分割
特征提取
图像识别与理解
典型的图像处理与识别过程
如图所示,图像预处理可以通过前面介绍的图像变换、增强与滤 波、图像复原等进行。图像分割就是把图像分解成各具相同性质 的、互不交叠的、有意义的区域和目标的技术和过程,这里的性 质可以是灰度、颜色、纹理、轮廓等,目标可以是单个区域,也 可以是多个区域。
E 2 (T ) =
T
E1 (T ) = ∫ p1 ( z )dz
T
∞
则总错误概率为 : E (T ) = θE1 (T ) + (1 − θ )E 2 (T )
−∞
∫ p (z )dz
2
第六章
令:
∂E (T ) =0 ∂T
图像分割
− θp1 (T ) + (1 − θ ) p 2 (T ) = 0
图像分割
6.3 基于边界的分割——不连续性——线的检测
(a)二值电路接线模板 (b)使用-450线检测算子 后得到的绝对值 (c)设置门限得到的结果
第六章
线的检测——算法描述
图像分割
6.3 基于边界的分割——不连续性——线的检测
– 依次计算4个方向的典型检测模板,得到Ri i=1,2,3,4
– 如 |Ri| > |Rj| 对于所有的j = i,那么这个点被称为在方向上更接 近模板i 所代表的线
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最小误差分割算法
则:
(6-1)
(T − μ1 )2 − (T − μ 2 )2 θσ 2 − = ln 2 (1 − θ )σ 1 2σ 12 2σ 2
对正态分布 :
p1 ( z ) ~ N (μ1 , σ 1 ) p 2 ( z ) ~ N (μ 2 , σ 2 )
第六章
基本全局门限
图像分割
6.2 灰度阈值分割法——相似性-基本全局门限
– 基本思想:用阈值T,并产生一个二值图,区分出前景对象和背 景 – 算法实现: • 规定一个阈值T,逐行扫描图像。 • 凡灰度级大于T的,颜色置为255;凡灰度级小于T的,颜色 置为0 – 适用场合:明度图像是可以控制的情况,例如用于工业监测系 统中
M −1
K 从 1~M 变化,使 σ 2 (k ) 最大的 K* 即为所求之最佳门限。
在 Matlab里提供了graythresh函数,采用了OTSU方法计算阈值。
第六章
图像分割
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最小误差分割算法
设目标的像点数占图像总点数的百分比为θ,背景点占 1- θ ,混合概率密 度为: p ( z ) = θ p1 ( z ) + (1 − θ ) p2 ( z ) 当选定门限为 T 时,目标点错划为背景点的概率为: 把背景点错划为目标点的概率为:
255 255
255 255 255
第六章
6.2 灰度阈值分割法——相似性
图像分割
阈值分割法 – 阈值分割法的特点: • 适用于物体与背景有较强对比的情况,重要的是背景或物体的灰 度比较单一。(可通过先求背景,然后求反得到物体) • 这种方法总可以得到封闭且连通区域的边界。 灰度值 f(x0,y0)
第六章
基本全局门限 1) 试探性设置门限 T
图像分割
6.2 灰度阈值分割法——相似性-基本全局门限
(a)原图 (b)图像的直方图 (c) 使用全局门限 T 处理图像得到 的结果,门限 T 是灰度级最大值和 最小值的中间值
第六章
基本全局门限 1) 试探性设置门限 T 2) 自动地得到 T,算法:
图像分割
第六章
图像分割
6.3 基于边界的分割——不连续性——点的检测
边界分割法包括:点的检测、线的检测、边的检测 1)点的检测——算法描述 –用空域的高通滤波器来检测孤立点 例:
8 8
6.1 图像分割 引言 6.2 灰度阈值分割法 6.3 基于边界的分割 6.4 面向区域的分割
图像割
第六章
6.1 图像分割 引言
图像分割
人类视觉在观察和分析一幅图像时,总是首先将注意力集中在图像中 的感兴趣的物体或区域,即将其从其他景物中分离开来,然后对其进 行特征分析,再根据其特征和大脑中对其的认识进行识别 。 计算机进行图像处理、识别的过程也是类似的过程,一个典型的图像 处理与识别过程如图所示。
1~ M
,第 i 级象素 ni 个,总象素 N = ∑ ni ,则第 i 级灰度 i =1 Pi = ni 。 N
C 0 = { ,2, L, k } 1
M
· 设灰度门限值为 k ,则图像像素按灰度级被分为两类:
C1 = {k + 1,L, M }
第六章
图像分割
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最大类间差(OTSU)
第六章
图像分割
6.3 基于边界的分割——不连续性——线的检测
线的检测 – 通过比较典型模板的计算值,确定一个点是否在某个方向的线上
-1 -1 -1 2 2 2 -1 -1 -1
水平模板
-1 -1 2 -1 2 -1 2 -1 -1
45度模板
-1 2 -1 -1 2 -1 -1 2 -1
垂直模板
2 -1 -1 -1 2 -1 -1 -1 2
第六章
6.1 图像分割 引言
图像分割
图像分割是按照某些特性(如灰度级,频谱,纹理等)将 图像划分成一些区域,在这些区域内其特性是相同的 或者说是均匀的,两个相邻区域彼此特性则是不同 的,其间存在着边缘或边界。 边缘 边界 图像分割从本质上来说是将图像中的象素按照特性的 不同进行分类的过程——像素分类。
可以用单一门限和多门限进行分割的灰度直方图
第六章
6.2 灰度阈值分割法——相似性
图像分割
通过直方图得到阈值 – 取值的方法: 取直方图谷底(最小值)的灰度值为阈值T – 缺点:会受到噪声的干扰,最小值不是预期的阈值,而偏离期望 的值; – 改进: 1)取两个峰值之间某个固定位置,如中间位置上。由于峰值代 表的是区域内外的典型值,一般情况下,比选谷底更可靠,可排 除噪声的干扰 2)对噪声的处理 对直方图进行平滑处理。
135度模板
图像
1 1 1 1 1 1 1 1 1 5 5 5 5 5 5 5 5 5 1 1 1 1 1 1 1 1 1
用4种模板分别计算 R水平 = -6 + 30 = 24 R45度 = -14 + 14 = 0 R垂直 = -14 + 14 = 0 R135度 = -14 + 14 = 0
第六章
第六章
6.1 图像分割 引言
图像分割的基本思路 1. 2. 3.
图像分割
从简到难,逐级分割 控制背景环境,降低分割难 度 把焦点放在增强感兴趣对 象,缩小不相干图像成分的 干扰上
第六章
6.1 图像分割 引言
图像分割
图像分割的基本思路 1. 从简到难,逐级分割 – 分割矩形区域 – 定位牌照 – 定位文字 2. 控制背景环境,降低分割难度 – 背景环境: 路面、天空 3. 把焦点放在增强感兴趣对象,缩 小不相干图像成分的干扰上 – 感兴趣的对象:汽车牌照 – 不相干图像成分:非矩形区域
第六章
图像分割
6.2 灰度阈值分割法——相似性-基本全局门限
(a)原图 (b)图像的直方图 (c) 通过迭代估计的门限 对图像进 行分割的结果
第六章
图像分割
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最大类间差(OTSU)
最佳全局和自适应门限 -包括 最大类间差(OTSU)算法和最小误差分割算法 · OTSU算法以最佳门限将图像灰度直方图分割成两部分,使两部分类间 方差取最大值,即分离性最大。 · 设图像灰度级 出现的概率为
第六章
6.2 灰度阈值分割法——相似性
图像分割
阈值分割法 – 阈值分割法的基本思想: • 确定一个合适的阈值 T(阈值选定的好坏是此方法成败 的关键)。 • 将大于等于阈值的像素作为物体或背景,生成一个二 值图像。 0 0 If f(x,y) ≥ T set 255 Else set 0 0 255
当 σ 12 = σ 22 = σ 2 时
T=
μ1 + μ2
2
+
σ2 μ2 − μ1
ln
θ
1−θ
(6-2)
T=
若先验概率已知,例如 : θ=1/2 时,有
μ1 + μ 2
2
(6-3)
这表示正态分布时,最佳阈值可按(6-2)、(6-3)式求得,若不是正态分布时, 则可用(6-1)式确定最小误差的阈值 。
第六章
6.1 图像分割 引言
图像分割
把图象空间按照一定的要求分成一些“有意义”的区域 的技术叫图象分割。 图象分割 例如: (1)要确定航空照片中的森林、耕地、城市区域等, 首先需要将这些部分在图象上分割出来。 (2)要辨认文件中的个别文字,也需先将这些文字分 选出来。
第六章
6.1 图像分割 引言
第六章
6.1 图像分割 引言
图像分割
图像分割是计算机进行图像处理与分析中的一个重要环节,是一种基 本的计算机视觉技术。 图像分割质量的好坏直接影响整个图像处理与分析系统的结果,关系 到目标识别与理解的成败,因此,图像分割的作用是至关重要的。 另外,图像的分割和目标的分离,用较少的数据量代表原始图像中的 目标,使得更高层的图像分析和理解成为可能。 图像分割的作用非常重要,多年来一直受到关注和重视,至今已提出 了上千种各种类型的图像分割算法,而且新的图像分割算法也在不断 的诞生。
第六章
6.1 图像分割 引言
图像分割
图像
图像预处理
图像分割
特征提取
图像识别与理解
典型的图像处理与识别过程
如图所示,图像预处理可以通过前面介绍的图像变换、增强与滤 波、图像复原等进行。图像分割就是把图像分解成各具相同性质 的、互不交叠的、有意义的区域和目标的技术和过程,这里的性 质可以是灰度、颜色、纹理、轮廓等,目标可以是单个区域,也 可以是多个区域。
E 2 (T ) =
T
E1 (T ) = ∫ p1 ( z )dz
T
∞
则总错误概率为 : E (T ) = θE1 (T ) + (1 − θ )E 2 (T )
−∞
∫ p (z )dz
2
第六章
令:
∂E (T ) =0 ∂T
图像分割
− θp1 (T ) + (1 − θ ) p 2 (T ) = 0
图像分割
6.3 基于边界的分割——不连续性——线的检测
(a)二值电路接线模板 (b)使用-450线检测算子 后得到的绝对值 (c)设置门限得到的结果
第六章
线的检测——算法描述
图像分割
6.3 基于边界的分割——不连续性——线的检测
– 依次计算4个方向的典型检测模板,得到Ri i=1,2,3,4
– 如 |Ri| > |Rj| 对于所有的j = i,那么这个点被称为在方向上更接 近模板i 所代表的线
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最小误差分割算法
则:
(6-1)
(T − μ1 )2 − (T − μ 2 )2 θσ 2 − = ln 2 (1 − θ )σ 1 2σ 12 2σ 2
对正态分布 :
p1 ( z ) ~ N (μ1 , σ 1 ) p 2 ( z ) ~ N (μ 2 , σ 2 )
第六章
基本全局门限
图像分割
6.2 灰度阈值分割法——相似性-基本全局门限
– 基本思想:用阈值T,并产生一个二值图,区分出前景对象和背 景 – 算法实现: • 规定一个阈值T,逐行扫描图像。 • 凡灰度级大于T的,颜色置为255;凡灰度级小于T的,颜色 置为0 – 适用场合:明度图像是可以控制的情况,例如用于工业监测系 统中
M −1
K 从 1~M 变化,使 σ 2 (k ) 最大的 K* 即为所求之最佳门限。
在 Matlab里提供了graythresh函数,采用了OTSU方法计算阈值。
第六章
图像分割
6.2 灰度阈值分割法——相似性-最佳全局和自适应门限-最小误差分割算法
设目标的像点数占图像总点数的百分比为θ,背景点占 1- θ ,混合概率密 度为: p ( z ) = θ p1 ( z ) + (1 − θ ) p2 ( z ) 当选定门限为 T 时,目标点错划为背景点的概率为: 把背景点错划为目标点的概率为:
255 255
255 255 255
第六章
6.2 灰度阈值分割法——相似性
图像分割
阈值分割法 – 阈值分割法的特点: • 适用于物体与背景有较强对比的情况,重要的是背景或物体的灰 度比较单一。(可通过先求背景,然后求反得到物体) • 这种方法总可以得到封闭且连通区域的边界。 灰度值 f(x0,y0)
第六章
基本全局门限 1) 试探性设置门限 T
图像分割
6.2 灰度阈值分割法——相似性-基本全局门限
(a)原图 (b)图像的直方图 (c) 使用全局门限 T 处理图像得到 的结果,门限 T 是灰度级最大值和 最小值的中间值
第六章
基本全局门限 1) 试探性设置门限 T 2) 自动地得到 T,算法:
图像分割
第六章
图像分割
6.3 基于边界的分割——不连续性——点的检测
边界分割法包括:点的检测、线的检测、边的检测 1)点的检测——算法描述 –用空域的高通滤波器来检测孤立点 例:
8 8