电机与拖动基础及MATLAB仿真习题答案(第四章)
电机与拖动基础及MATLAB仿真习题答案(第四章)
电机与拖动基础及MATLAB仿真习题答案(第四章)4-14 ⼀台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=87.5%,求电动机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-15 ⼀台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-16 已知⼀台直流电机极对数p=2,槽数Z 和换向⽚数K 均等于22,采⽤单叠绕组。
试求:(1)绕组各节距;(2)并联⽀路数。
解:(1)第⼀节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第⼆节距415y 12=-=-=y y(2)并联⽀路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,⽓隙每极磁通Φ=2.1×10-2Wb ,试求:(1)采⽤单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持⽀路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联⽀路对数a=p=3,电磁转矩 m N I a pN T a ?==Φ=38.1310021.0314.3240032π如果把电枢绕组改为单波绕组, 保持⽀路电流a i 的数值不变,则电磁转矩也不变,仍为 13.369m N ?,因为⽆论是叠绕组还是波绕组,所有导体产⽣的电磁转矩的⽅向是⼀致的, 保持⽀路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
也可以⽤计算的⽅法: 单叠绕组时并联⽀路数为6,⽀路电流 A I i a a 6106==改为单波绕组, 保持⽀路电流a i 的数值不变,仍为A 610,⽽并联⽀路数为2 (a=1), 电枢电流A i I a a 3102== 电磁转矩 m N T ?==38.13310021.0114.324003。
matlab语言与控制系统仿真参考答案第4章
4.5 控制系统的数学模型MATLAB 实训1.练习并掌握TF 模型、ZPK 模型、SS 模型的建立方法。
2.练习并掌握TF 模型、ZPK 模型、SS 模型间的转换方法。
3.练习并掌握求取多个模块串联、并联、反馈后总的模型的方法。
4.练习并掌握模型数据的还原方法。
1.写出以下系统的多项式模型,并将其转换为零极点模型;(1)2153173261552115.35291)(23452341++++++-+-=s s s s s s s s s s G >> n1=[91,-52,3.5,-11,52];d1=[1,15,26,73,31,215];sys1=tf(n1,d1)[z1,p1,k1]=tf2zp(n1,d1)sys1zp=zpk(z1,p1,k1)运行结果如下:Transfer function:91 s^4 - 52 s^3 + 3.5 s^2 - 11 s + 52-------------------------------------------s^5 + 15 s^4 + 26 s^3 + 73 s^2 + 31 s + 215z1 =0.7705 + 0.5468i0.7705 - 0.5468i-0.4848 + 0.6364i-0.4848 - 0.6364ip1 =-13.4656-1.3473 + 1.9525i-1.3473 - 1.9525i0.5801 - 1.5814ik1 =91Zero/pole/gain:91 (s^2 - 1.541s + 0.8927) (s^2 + 0.9697s + 0.6401)--------------------------------------------------------------------------(s+13.47) (s^2 - 1.16s + 2.837) (s^2 + 2.695s + 5.627)(2)21.311395.2251315239.5621.635.711017.38)(23456723452++-+-++++-+-=s s s s s s s s s s s s s G >> n2=[1,-38.7,101,-71.5,63.1,562.39];d2=[1,2,5,-31,51,-22.5,39,311.21];sys2=tf(n2,d2)[z2,p2,k2]=tf2zp(n2,d2)sys2zpkmx=zpk(z2,p2,k2)Transfer function:s^5 - 38.7 s^4 + 101 s^3 - 71.5 s^2 + 63.1 s + 562.4---------------------------------------------------------------------------s^7 + 2 s^6 + 5 s^5 - 31 s^4 + 51 s^3 - 22.5 s^2 + 39 s + 311.2z2 =35.94372.95890.5590 + 1.9214i0.5590 - 1.9214i-1.3206p2 =-2.5015 + 3.1531i-2.5015 - 3.1531i1.9492 + 1.0027i1.9492 - 1.0027i0.2072 - 1.7349i-1.3097k2 =1Zero/pole/gain:(s-35.94) (s-2.959) (s+1.321) (s^2 - 1.118s + 4.004)--------------------------------------------------------------------------------------------------(s+1.31) (s^2 - 3.898s + 4.805) (s^2 - 0.4143s + 3.053) (s^2 + 5.003s + 16.2)2.写出以下系统的零极点模型,并将其转换为多项式模型,并将其展开成为部分分式形式;(1))11.5)(9.4)(5.3)(6.2)(3.1()02.6)(5.0(36)(1+++++++=s s s s s s s s s G >> z=[-0.5;-6.02];>> p=[0;-1.3;-2.6;-3.5;-4.9;-5.11];>> k=36;>> sys=zpk(z,p,k)Zero/pole/gain:36 (s+0.5) (s+6.02)--------------------------------------------------s (s+1.3) (s+2.6) (s+3.5) (s+4.9) (s+5.11)>> [n,d]=zp2tf(z,p,k)n =0 0 0 0 36.0000 234.7200 108.3600d =1.0000 17.4100 116.1430 367.5889 544.8325 296.2114 0>> systfxs=tf(n,d)Transfer function:36 s^2 + 234.7 s + 108.4-------------------------------------------------------------------------------s^6 + 17.41 s^5 + 116.1 s^4 + 367.6 s^3 + 544.8 s^2 + 296.2 s>> [r,p,k]=residue(n,d);>> [r';p']ans =9.1407 -14.8730 17.4236 -14.7227 2.6656 0.3658-5.1100 -4.9000 -3.5000 -2.6000 -1.3000 0即部分分式分解结果为 s s s s s s s G 3658.03.16656.26.27227.145.34236.179.4873.1411.51407.9)(++++-+++-+=(2))6)(5)(4)(2()5.3)(3)(1(15.9)(22+-++-++=s s s s s s s s s G >> z=[-1;-3;3.5];>> p=[0;0;-2;-4;5;6];>> k=9.15;>> sys=zpk(z,p,k)Zero/pole/gain:9.15 (s+1) (s+3) (s-3.5)-------------------------------s^2 (s+2) (s+4) (s-5) (s-6)>> [n,d]=zp2tf(z,p,k)n =0 0 0 9.1500 4.5750 -100.6500 -96.0750d =1 -5 -28 92 240 0 0>> systfxs=tf(n,d)Transfer function:9.15 s^3 + 4.575 s^2 - 100.7 s - 96.08---------------------------------------------------s^6 - 5 s^5 - 28 s^4 + 92 s^3 + 240 s^2>> [r,p,k]=residue(n,d);>> [r';p']ans =0.5004 -0.4183 0.0715 0.1123 -0.2659 -0.40036.0000 5.0000 -4.0000 -2.0000 0 0即部分分式分解结果为 24003.02659.021123.040715.054183.065004.0)(s s s s s s s G --++++---= 3.已知系统的状态空间表达式,写出其SS 模型,并求其传递函数矩阵(传递函数模型),若状态空间表达式为⎩⎨⎧+=+=DuCx y Bu Ax x ,则传递函数矩阵表达式为: D B A sI C s G +-=-1)()(。
电机与拖动基础及MATLAB仿真习题答案(第四章)

4-14 一台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=%,求电动机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-15 一台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-16 已知一台直流电机极对数p=2,槽数Z 和换向片数K 均等于22,采用单叠绕组。
试求:(1)绕组各节距;(2)并联支路数。
解:(1)第一节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第二节距415y 12=-=-=y y(2)并联支路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,气隙每极磁通Φ=×10-2Wb ,试求:(1)采用单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持支路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联支路对数a=p=3,电磁转矩 m N I a pN T a ⋅=⨯⨯⨯⨯⨯=Φ=38.1310021.0314.3240032π 如果把电枢绕组改为单波绕组, 保持支路电流a i 的数值不变,则电磁转矩也不变,仍A U P I N N N N 79.207875.022010403=⨯⨯==ηkWI U P N N 71.4579.2072201=⨯=⨯=A U P I N N N 5.35623010823=⨯==KW P P N 11.911==η为m N ⋅,因为无论是叠绕组还是波绕组,所有导体产生的电磁转矩的方向是一致的,保持支路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
《电机原理及拖动基础》习题参考答案[最新]
![《电机原理及拖动基础》习题参考答案[最新]](https://img.taocdn.com/s3/m/7e167eefbb0d4a7302768e9951e79b8969026840.png)
教 材《电机原理及拖动基础》方荣惠 邓先明 上官璇峰 编著中国矿业大学出版社,2001,12习题参考答案第一章 第二章 第三章 第四章 第五章第六章 第七章 第八章 第九章第一章1-5 解:cm /A 98H ,T 1002.0002.0AB ====φ(1) F=Hl=98A/cm ⨯30cm=2940A;I=F/N=2940/1000=2.94A.(2) 此时,F 总=H 铁l 铁+H δδ其中:H 铁l 铁=98A/cm ⨯29.9cm=2930.2A;H δδ=δ⨯B/μ0=0.001/(4π⨯10-7)=795.8A;所以:F 总=2930.2+795.8=3726A1-6 解:(1);5.199sin Z x ;1407.0200cos Z r 2005.0100Z 1111111ΩϕΩϕΩ===⨯====(2);66.8sin Z x ;55.010cos Z r 1010100Z 1221222ΩϕΩϕΩ===⨯====1-7 解:每匝电势为:匝744884.036N ;V 4884.00022.05044.4f 44.4e m 1===⨯⨯==φ 第二章2-13 解:作直线运动的总质量为:Kg 63966.128022m )1m m (2m =⨯⨯+++⨯=总转动惯量为:22L kg 63964D m m J ⋅=⨯==总ρ系统折算后总转动惯量为:2M 2m L eq mkg 74.49J i J J 2J J ⋅=+++=总负载静转矩为:Nm127792/D g )Hq m (T 2L =⨯⨯+=折算后负载转矩为:Nm 710i T T L'L ==η电动机转速加速度等于:5.95dtdvD 60i dt dn idtdnm ===π由运动方程的启动转矩:Nm 4.12075.9555.974.49710dt dn 55.9J T T eq 'L k =⨯+=+=第三章3-12 解:因为:n 60NpE a φ=(1)单叠:a=2;6004.02602N 230⨯⨯⨯⨯=;N=5750。
电机与拖动课后习题答案
《电机与拖动》参考答案 2-1(1) 切削功率:WFV P s m d n V r j j j n n L f f 38009.1*2000/9.1215.0*6067.241*22*602min/67.2412*5.1*21450321=========ππ (2) 电动机输出功率:W P P L6.52129.0*9.0*9.038003212===ηηη(3) 系统总飞轮转矩:222222223222122221221222.55.425.03.05.05.32*5.1*295.1*27.2225.3mN j j j GD j j GD j GD GD GD d c b a =+++=+++=+++=(4) 电动机电磁转矩:M N j j j FD T T L.29.349.0*9.0*9.0*2*5.1*22/15.0*20002/3213213212====ηηηηηη(5) 不切削时的电动机电磁转矩: 忽略损耗时的电动机电磁转矩M N j j j FD T .252*5.1*22/15.0*20002/'3212===传动机构阻转矩:M N T T T .29.92529.34'220=-=-=加速时电动机转矩:M N dt dn GD T T .19800*37555.429.937520=+=+= 2-2(a ) 减速dtdnGD T T L 3752=-(b ) 减速dtdnGD T T L 3752=--(c ) 加速dtdnGD T T L 3752=+(d ) 减速dtdnGD T T L 3752=--(e )匀速dtdnGD T T L 3752=+-2-3(a) 稳定 ;(b )稳定;(c) 稳定; (d) 稳定; (e) 不稳定;第三章3-1 直流发电机通过电刷和换向器将导体中的交流电势整流成直流输出。
如果没有换向器输出的将是交流电势。
3-2 直流电动机通过电刷和换向器将外部输入直流电压,逆变成导体中的交流电压和电流。
电机与拖动基础 第2版 (许建国 著) 高等教育出版社 第四章 课后答案

第四章4 .1 如果电源频率是可调的,当频率为50 Hz 及40 Hz 时,六极同步电动机的转速各 是多少? 解: n =1n =pf 160六极同步电动机P=3,当1f =50HZ 时,min /100035060r n =⨯=; 当1f =40HZ 时,min /80034060r n =⨯=4 . 2 同步电动机在正常运行时,转子励磁绕组中是否存在感应电动势?在起动过程中 是否存在感应电动势?为什么?答: 同步电动机在正常运行时,转子励磁绕组中不存在感应电动势。
正常运行时转子的转速等于定子旋转磁场的转速,转子励磁绕组与定子旋转磁场之间没有相对切割运动,所以转子励磁绕组中不会产生感应电动势。
在起动过程中转子励磁绕组中存在感应电动势,因为起动时转子的转速低于定子旋转磁场的转速,转子励磁绕组与定子旋转磁场之间有相对切割运动,所以转子励磁绕组中会产生感应电动势。
4 . 3 为什么异步电动机不能以同步转速运行而同步电动机能以同步转速运行?答: 若异步电动机以同步转速运行,则转子的转速等于定子旋转磁场的转速,两者之间没有相对切割运动,在转子绕组中不会产生感应电动势,没有电流,没有电磁转矩,异步电动机不能运行,所以异步电动机不能以同步转速运行。
同步电动机的定子绕组通入三相交流电产生旋转磁场,而转子励磁绕组通入直流电产生恒定磁场,只有当转子转速等于同步转速时,同步电动机才能产生固定方向的电磁转矩,从而带动负载运行;如果转子转速不等于同步转速,则产生的电磁转矩的方向是交变的,时而是顺时针方向,时而是逆时针方向,平均电磁转矩为零,所以同步电动机只能以同步转速运行。
4 . 4 为什么要把凸极同步电动机的电枢磁动势aF 和电枢电流I 分解为直轴和交轴两个分量?答: 凸极同步电动机结构上的特点是转子具有明显突出的磁极,使得定、转子之间的气隙是不均匀的,这给分析工作带来困难。
为便于分析,在转子上放置垂直的两根轴,即直轴和交轴,直轴与转子轴线重合,交轴与转子轴线垂直,这样使得沿直轴或交轴方向的磁路是对称的,同时由于直轴与交轴互相垂直,计算直轴方向的磁通时不必考虑交轴磁动势的影响,同样,计算交轴方向的磁通时也不必考虑直轴磁动势的影响,可使计算工作简化,所以常把凸极同步电动机的电枢磁动势aF 和电枢电流I 分解为直轴和交轴两个分量。
matlab第四章课后答案

%Exerc ise 1(1)r oots([1 11])%Exer cise1(2)roots([3 0 -4 0 2 -1])%Exerc ise 1(3)p=zero s(1,24);p([1 17 1822])=[5 -6 8 -5];ro ots(p)%E xerci se 1(4)p1=[2 3];p2=conv(p1,p1);p3=co nv(p1, p2);p3(end)=p3(en d)-4; %原p3最后一个分量-4r oots(p3)%Exer cise2fun=inli ne('x*log(sqrt(x^2-1)+x)-sqrt(x^2-1)-0.5*x');fzer o(fun,2)%Exer cise3fun=inli ne('x^4-2^x');fplot(fun,[-2 2]);gr id on;fze ro(fu n,-1),fzer o(fun,1),f minbn d(fun,0.5,1.5)%Exe rcise 4fu n=inl ine('x*sin(1/x)','x');fp lot(f un, [-0.10.1]);x=z eros(1,10);fori=1:10, x(i)=fz ero(f un,(i-0.5)*0.01);end;x=[x,-x]%Ex ercis e 5f un=in line('[9*x(1)^2+36*x(2)^2+4*x(3)^2-36;x(1)^2-2*x(2)^2-20*x(3);16*x(1)-x(1)^3-2*x(2)^2-16*x(3)^2]','x');[a,b,c]=fso lve(f un,[0 0 0])%E xerci se 6fun=@(x)[x(1)-0.7*si n(x(1))-0.2*cos(x(2)),x(2)-0.7*cos(x(1))+0.2*sin(x(2))]; [a,b,c]=fsolv e(fun,[0.5 0.5])%E xerci se 7clear; clo se; t=0:p i/100:2*pi;x1=2+sqr t(5)*cos(t); y1=3-2*x1+sq rt(5)*sin(t);x2=3+s qrt(2)*cos(t);y2=6*sin(t);pl ot(x1,y1,x2,y2); gri d on; %作图发现4个解的大致位置,然后分别求解y1=fsolv e('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[1.5,2])y2=fsolv e('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[1.8,-2])y3=fsol ve('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[3.5,-5])y4=fso lve('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[4,-4])%Exerc ise 8(1)c lear;fun=inlin e('x.^2.*(x.^2-x-2)');fp lot(f un,[-2 2]);grid on;%作图观察x(1)=-2;x(2)=fminb nd(fu n,-1,-0.5);x(4)=fmi nbnd(fun,1,2);fun2=inlin e('-x.^2.*(x.^2-x-2)');x(3)=f minbn d(fun2,-0.5,0.5);x(5)=2feval(fun,x)%答案: 以上x(2)(4)是局部极小,x(1)(3)(5)是局部极大,从最后一句知道x(1)全局最大, x(4)最小。
34125《电机与拖动基础及MATLAB仿真》陈亚爱(程序代码)书中仿真实例Matlab程序代码

【仿真实例0-1】解:用M语言编写计算励磁电流程序如下:%磁路计算求解励磁电流问题clc%清除主程序窗口clear%清除变量空间的变量A=0.8*1e-3;%已知铁心截面积m2,1e-3表示10-3kFe=0.94;%已知铁心叠片系数Ph=1*1e-3;%需产生的磁通量Wbu0=4*pi*1e-7;%已知空气磁导率H/m,1e-7表示10-7 l1=0.08;l2=0.1;l3=0.034;l4=0.04;l5=0.1;%已知各段磁路长度mN=2000;%已知励磁绕组匝数d=0.006;%已知气隙长度mAk=kFe*A;%计算净截面积m2B=Ph/Ak;%计算铁心磁通密度uFe=1900*u0;%计算铁心磁导率Hc=B/uFe;%计算铁心磁场强度Fc=Hc*(l1+l2+l3+l4+l5);%计算铁心的磁压降Ha=Ph/u0/A;%计算气隙磁场强度Fa=Ha*d;%计算气隙的磁压降F=Fc+Fa;%计算总磁压降i=F/N;%计算励磁电流s=num2str(i);%将数字转换成字符串s1='励磁电流为:';%定义字符串s=strcat(s1,s,'A');%合并字符串disp(s);%显示计算结果程序运行结果为:励磁电流为:3.0827A【仿真实例0-2】解:计算电感系数的公式为L= μ0μr AN2/l,用M语言编写计算电感系数和绘制电感系数与相对磁导率之间关系曲线程序如下:%求解电感系数和绘制L=f(μr)曲线问题clc%清除主程序窗口clear%清除变量空间的变量u0=pi*4e-7;%已知空气磁导率H/m,1e-7表示10-7 N=400;l=0.3;d=0.005;A=8e-4;A0=8e-4;%已知匝数、铁心长度、气隙、截面积R0=d/(u0*A0);%求气隙磁阻for n=1:80;%for循环语句ur(n)=100+(10000-100)*(n-1)/100;%求相对磁导率Rm(n)=l/(ur(n)*u0*A);%求铁心磁阻R=R0+Rm(n);%求计算总磁阻L(n)=N^2/R;%求电感系数end%for循环语句的结束plot(ur,L)%绘制L=f(μr)曲线title('{\itL=f}({\it\mu}_r)关系曲线')%标题'L=f(μr)关系曲线'xlabel('铁心相对磁导率{\it\mu}_r')%设置x坐标标签“铁心相对磁导率μr”ylabel('电感系数{\itL}[H]')%设置y坐标标签“电感系数L[H]”【仿真实例0-3】解:用M语言编写拟合磁化曲线的MATLAB程序如下:%拟合与绘制磁化曲线问题clcclearHdata=[1.38,1.40,1.42,1.44,1.46,1.48,1.50,1.52,1.54,1.56,...1.58,1.60,1.62,1.64,1.66,1.69,1.71,1.74,1.76,1.78,...1.81,1.84,1.86,1.89,1.91,1.94,1.97,2.00,2.03,2.06,...2.10,2.13,2.16,2.20,2.24,2.28,2.32,2.36,2.40,2.45,...2.50,2.55,2.60,2.65,2.70,2.76,2.81,2.87,2.93,2.99,...3.06,3.13,3.19,3.26,3.33,3.41,3.49,3.57,3.65,3.74,...3.83,3.92,4.01,4.11,4.22,4.33,4.44,4.56,4.67,4.80,...4.93,5.07,5.21,5.36,5.52,5.68,5.84,6.00,6.16,6.33,...6.52,6.72,6.94,7.16,7.38,7.62,7.86,8.10,8.36,8.62,...8.90,9.20,9.50,9.80,10.1,10.5,10.9,11.3,11.7,12.1,...12.6,13.1,13.6,14.2,14.8,15.5,16.3,17.1,18.1,19.1,...20.1,21.2,22.4,23.7,25.0,26.7,28.5,30.4,32.6,35.1,...37.8,40.7,43.7,46.8,50.0,53.4,56.8,60.4,64.0,67.8];%磁场强度数据Bdata=0.40:0.01:1.69;%磁感应强度数据len=length(Hdata);%计算数组长度Hmax=Hdata(len);%提取数组最大值a=polyfit(Hdata,Bdata,13);%计算多项式拟合系数a for n=1:151%提取拟合数据Hfit(n)=Hmax*(n-1)/150;Bfit(n)=a(1)*Hfit(n)^13+a(2)*Hfit(n)^12+a(3)*Hfit(n)^11+...a(4)*Hfit(n)^10+a(5)*Hfit(n)^9+a(6)*Hfit(n)^8+a(7)*Hfit(n)^7+...a(8)*Hfit(n)^6+a(9)*Hfit(n)^5+a(10)*Hfit(n)^4+a(11)*Hfit(n)^3+...a(12)*Hfit(n)^2+a(13)*Hfit(n)+a(14);endplot(Hdata,Bdata,'*')%对原数据描点绘图hold on%保持当前坐标轴和图形plot(Hfit,Bfit)%绘制多项式拟合曲线hold on%保持当前坐标轴和图形title('磁化曲线')%标题'磁化曲线'xlabel('{\itH}[A/cm]')%x坐标标签“H[A/cm]”ylabel('{\itB}[T]')%y坐标标签“B[T]”【仿真实例0-4】解:用M语言编写绘制磁化曲线的MATLAB程序如下:%绘制磁化曲线问题clcclearHdata=[43,49,55,61,67,72.5,78,84,90,100,110,...123,137,155,173,192,210,240,300,395,...520,643,800,920,1100,1300,1800];%磁场强度H值Bdata=0.2:0.05:1.50;%磁感应强度B值ydata=0:0.001:1.6;%y坐标0~1.6xdata=interp1(Bdata,Hdata,ydata,'spline');%采用样条插值的方法分析数据plot(Hdata,Bdata,'*');%用'*'描点绘制磁化曲线hold on%保持当前坐标轴和图形plot(xdata,ydata);%绘制x,y坐标hold on%保持当前坐标轴和图形title('磁化曲线')%标题'磁化曲线'xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'ylim([0,1.80])%y坐标标注0~1.8【仿真实例0-5】解:用M语言编写绘制磁滞回线的MATLAB程序如下:%绘制磁滞回线问题clcclearBdata=[0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,...-0.9,-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0];%磁感应强度基本数据Hdata=[48,52,58,73,85,103,135,193,80,42,2,-18,...-29,-40,-45,-48,-52,-58,-73,-85,-103,-135,...-193,-80,-42,-2,18,29,40,45,48];%磁场强度基本数据plot(Hdata,Bdata)%绘制磁滞回线hold on%保持当前坐标轴和图形title('磁滞回线')%标题'磁滞回线'plot([-250,250],[0,0],'r-')%绘制红色x轴坐标线hold on%保持当前坐标轴和图形plot([0,0],[-1.5,1.5],'r-')%绘制红色y轴坐标线xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'grid on%显示网格【仿真实例0-6】解:用M语言编写绘制基于【仿真实例0-5】磁滞回线的平均曲线的MATLAB程序如下:%绘制磁滞回线的平均曲线问题clcclearBdata=[-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,...0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,-0.9,-1.0];%磁感应强度基本数据Hdata=[-193,-80,-42,-2,18,29,40,45,48,52,58,73,85,...103,135,193,80,42,2,-18,-29,-40,-45,...-48,-52,-58,-73,-85,-103,-135,-193];%磁场强度基本数据plot(Hdata,Bdata,'linewidth',1.5)%绘制磁滞回线hold on%保持当前坐标轴和图形Bdata1=[-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.7,0.8,0.9,1.0];Hdata1=[-193,-80,-42,-2,18,29,40,45,48,52,58,73,85,103,135,193];Bdata2=[-1.0,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.7,0.8,0.9,0.95,1.0];Hdata2=[-193,-135,-103,-85,-73,-58,-52,-48,-45,-40,-29,-18,2,42,80,193];%将数据分两组If=-1.0:.05:1.0;%重新设置磁感应强度参数Ean1=spline(Bdata1,Hdata1,If);Ean2=spline(Bdata2,Hdata2,If);%根据两组数据求If对应的样条差值plot((Ean1+Ean2)/2,If,':','linewidth',1.5)%绘制平均值曲线hold on%保持当前坐标轴和图形title('磁滞回线的平均曲线')%标题'磁滞回线的平均曲线'plot([-250,250],[0,0],'r-')%绘制红色x轴坐标线hold on%保持当前坐标轴和图形plot([0,0],[-1.5,1.5],'r-')%绘制红色y轴坐标线xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'grid on%显示网格【仿真实例1-1】解:用M语言编写绘制基本磁化曲线和磁路未饱和的磁化电流曲线的MATLAB程序如下:clcclearBdata=[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,1.1,...%磁通密度基本数据1.2,1.3,1.34,1.38,1.41,1.43,1.45,1.47,...1.48,1.49,1.495,1.5,1.55,1.6];Hdata=[5,10,20,25,40,50,60,70,90,110,150,...%磁场强度基本数据200,300,400,500,600,700,800,900,...1000,1100,1200,1700,5000,10000];B=[-Bdata,0,Bdata];%将磁通密度数据扩展为正负值H=[-Hdata,0,Hdata];%将磁场强度数据扩展为正负值B=sort(B);%对磁通密度数据进行排序H=sort(H);%对磁场强度数据进行排序subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=0:0.01:2*pi;%正弦函数自变量从0~2π,间隔0.01 Bsin=1.1*sin(Bx);%计算正弦磁通密度值,幅值为1.1 plot(Bx,Bsin);%绘制磁通密度正弦曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标范围为0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on%保持图形plot(H,B,'ro');%用红色'o'绘制原始数据点grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'mymodel=fittype('a*sinh(b*x)');%选择sinh为拟合模型opts=fitoptions(mymodel);%初始化设置set(opts,'Robust','LAR','Normalize','Off');%设置使用线性最小二乘法拟合Fit=fit(B',H',mymodel,opts);%拟合bt=B;%拟合曲线临时磁通密度数据ht=Fit.a.*sinh(Fit.b.*bt);%拟合曲线临时磁场强度数据plot(ht,bt);%在原始数据窗口绘制拟合曲线subplot(2,2,4);%将窗口划分2行2列使用第4子窗口hold on;%保持图形MX=1.6;%磁通密度最大值BI1=sin((-MX:0.01:MX)./MX.*pi).*MX;%磁通正弦变化HI1=Fit.a.*Fit.b.*BI1;%拟合曲线映射后的磁场强度XI1=1:length(BI1);%初始化x轴刻度XI1=XI1/length(BI1)*2*pi;%折算到0~2πplot(XI1,HI1);%绘制磁化电流曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标显示范围xlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例1-2】解:用M语言编写绘制基本磁化曲线和磁路未饱和的磁化电流曲线的MATLAB程序如下:clcclearBdata=[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,1.1,...%磁通密度基本数据1.2,1.3,1.34,1.38,1.41,1.43,1.45,1.47,...1.48,1.49,1.495,1.5,1.55,1.6];Hdata=[5,10,20,25,40,50,60,70,90,110,150,...%磁场强度基本数据200,300,400,500,600,700,800,900,...1000,1100,1200,1700,5000,10000];B=[-Bdata,0,Bdata];%将磁通密度数据扩展为正负值H=[-Hdata,0,Hdata];%将磁场强度数据扩展为正负值B=sort(B);%对磁通密度数据进行排序H=sort(H);%对磁场强度数据进行排序subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=0:0.01:2*pi;%正弦函数自变量从0~2π,间隔0.01 Bsin=1.5*sin(Bx);%计算正弦磁通密度值,幅值为1.5 plot(Bx,Bsin);%绘制磁通密度正弦曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标范围为0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on%保持图形plot(H,B,'ro');%用红色'o'绘制原始数据点grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)' mymodel=fittype('a*sinh(b*x)');%选择sinh为拟合模型opts=fitoptions(mymodel);%初始化设置set(opts,'Robust','LAR','Normalize','Off');%设置使用线性最小二乘法拟合Fit=fit(B',H',mymodel,opts);%拟合bt=B;%拟合曲线临时磁通密度数据ht=Fit.a.*sinh(Fit.b.*bt);%拟合曲线临时磁场强度数据plot(ht,bt);%在原始数据窗口绘制拟合曲线subplot(2,2,4);%将窗口划分2行2列使用第4子窗口hold on;%保持图形MX=1.6;%磁通密度最大值BI1=sin((-MX:0.01:MX)./MX.*pi).*MX;%磁通正弦变化HI1=Fit.a.*sinh(Fit.b.*BI1);%拟合曲线映射后的磁场强度XI1=1:length(BI1);%初始化x轴刻度XI1=XI1/length(BI1)*2*pi;%折算到0~2πplot(XI1,HI1);%绘制磁化电流曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标显示范围xlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例1-3】解:用M语言编写绘制磁滞回线的MATLAB程序如下:clcclearBdata=[0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,...-0.9,-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0];%输入磁感应强度基本数据Hdata=[0.24,0.26,0.29,0.365,0.425,0.515,0.675,...0.965,0.4,0.21,0.01,-0.09,-0.145,-0.2,...-0.225,-0.24,-0.26,-0.29,-0.365,-0.425,...-0.515,-0.675,-0.965,-0.4,-0.21,-0.01,...0.09,0.145,0.2,0.225,0.24];%输入磁场强度基本数据MX=1.39;%磁通密度最大值H=Hdata;B=Bdata;%磁滞回线数据H=H.*10;B=B.*MX;%调整B和H的显示比例subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=-pi/2:0.01:3*pi/2;%磁通密度数据范围-π/2~3π/2Bsin=1.5*sin(Bx);%计算正弦值扩大1.5倍以适应磁滞回线plot(Bx,Bsin);%绘制磁通密度正弦曲线hold on;%保持图形plot([-pi/23*pi/2],[00],'r-')%用红色实线绘制磁密曲线的x坐标轴plot([00],[-22],'r-')%用红色实线绘制磁密曲线的y坐标轴grid on;%显示网格线xlim([-pi/2,3*pi/2]);%限定横坐标显示范围-π/2~3π/2 xlabel('角度{\it\omegat}/rad');%在横坐标上标注'ωt'ylabel('磁通密度{\itB}/(T)');%在纵坐标上标注'磁通密度B/(T)' subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on;%保持图形plot(H,B,'ro');%用红色'o'绘制磁滞回线B1=B(1:8);H1=H(1:8);%第1象限数据B>0数据B2=B(8:15);H2=H(8:15);%第2象限数据B>0数据B3=B(16:23);H3=H(16:23);%第3象限数据B>0数据B4=B(23:30);H4=H(23:30);%第4象限数据B>0数据BB1=[B4,B1];HH1=[H4,H1];%磁滞回线的下分支XI1=-10:0.1:10;%设置横坐标值YI1=interp1(HH1,BB1,XI1,'spline');%用3次样条插值计算plot(XI1,YI1);%绘制插值后磁滞回线下分支BB2=[B2,B3];HH2=[H2,H3];%磁滞回线的上分支XI2=-10:0.1:10;%设置横坐标值YI2=interp1(HH2,BB2,XI2,'spline');%用3次样条插值计算plot(XI2,YI2);%绘制插值后磁滞回线上分支grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}/(T)');%在纵坐标上标注'磁通密度B/(T)'xlim([-1515])%设置横坐标范围subplot(2,2,4);%将窗口划分2行2列使用第4子窗口XI1=sin((0:0.01:MX)./MX.*pi./2).*MX;%磁通密度正弦变化(0~π/2)YI1=interp1(B1,H1,XI1,'spline');%用3次样条插值计算lengthX=length(XI1)-1;%计算先前波形的横坐标长度X1=(0:lengthX);%设置横坐标范围(0~π/2)X1=X1/lengthX*pi./2;plot(X1,YI1);%绘制0~π/2上的曲线hold on;%保持图形XI2=sin((MX:0.01:2*MX)./MX.*pi./2).*MX;%磁通密度正弦变化(π/2~π)YI2=interp1(B(8:16),H(8:16),XI2,'spline');%用3次样条插值计算lengthX=length(XI2)-1;%计算先前波形的横坐标长度X2=(lengthX:2*lengthX);%设置横坐标范围(π/2~π)X2=X2/lengthX*pi./2;plot(X2,YI2);%绘制π/2~π上的曲线XI3=sin((MX:0.01:1.5*MX)./MX.*pi).*MX;%磁通密度正弦变化(π~3π/2)YI3=interp1(B3,H3,XI3,'spline');%用3次样条插值计算lengthX=length(XI3)-1;%计算先前波形的横坐标长度X3=(2*lengthX:3*lengthX);%设置横坐标范围(π~3π/2)X3=X3/lengthX*pi./2;plot(X3,YI3);%绘制π~3π/2上的曲线XI4=sin((1.5*MX:0.01:2*MX)./MX.*pi).*MX;%磁通密度正弦变化(3π/2~2π)YI4=interp1(B4,H4,XI4,'spline');%用3次样条插值计算lengthX=length(XI4)-1;%计算先前波形的横坐标长度X4=(3*lengthX:4*lengthX);%设置横坐标范围(3π/2~2π)X4=X4/lengthX*pi./2;plot(X4,YI4);%绘制3π/2~2π上的曲线grid on;%显示网格线plot([0,2*pi],[00],'r-')%用红色实线绘制磁化电流曲线的x坐标轴xlim([0,2*pi]);%限定横坐标显示范围0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'ωt'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例2-1】解:用M语言编写绘制【例2-1】功角特性曲线的MATLAB程序如下:clcclearU1=6000/sqrt(3);%定子相电压I1=57.8;%定子相电流xd=64.2;%直轴电抗xq=40.8;%交轴电抗cosfain=0.8;%cosϕN=0.8fain=acos(cosfain);%求ϕNsinfain=sin(fain);%求sinϕNpsi=atan((U1*sinfain+xq)/(U1*cosfain));%求内功率因数角ψId=I1*sin(psi)*exp(1i*pi/2-psi);%计算直轴电流分量Iq=I1*cos(psi)*exp(-psi);%计算交轴电流分量E0=abs(U1*exp(-1i*fain)-1i*Id*xd-1i*Iq*xq);%计算励磁电动势th=0:0.01:pi;%x坐标轴0~π变化x=th./pi.*180;%换算成角度Pem1=3*U1*E0/xd.*sin(th);%求基本电磁功率Pem2=1.5*U1^2*(1/xq-1/xd).*sin(2.*th);%求附加电磁功率Pem=Pem1+Pem2;%凸极电磁功率hold on;%保持当前坐标轴和图形plot(x,Pem1,'b-',x,Pem2,'b-',x,Pem,'b-')%绘制各功角特性plot([0180],[00],'r-')%用红色实现绘制x坐标轴plot([9090],[-2e510e5],'r--')%用红色虚线绘制90°对应值text(50,9e5,'Pem')%在相应位置标注“Pem”text(130,7e5,'Pem1')%在相应位置标注“Pem1”text(70,1.5e5,'Pem2')%在相应位置标注“Pem2”xlabel('Angle[°]');%横坐标标注“Angle[°]”ylabel('Power[kW]');%纵坐标标注“Power[kW]”title('三相凸极同步电动机功角特性');%标题“三相凸极同步电动机功角特性”【仿真实例2-2】解:用M语言编写绘制【例2-2】矩角特性曲线的MATLAB程序如下:clcclearU1=3464;%定子相电压E0=6378;%励磁电动势xc=64;%同步电抗n1=1000;%同步转速th=0:.01:pi;%x坐标轴0~π变化x=th./pi.*180;%换算成角度T=90*U1*E0/(xc*pi*n1).*sin(th);%求电磁转矩plot(x,T)%绘制矩角特性xlabel('Angle[°]');%横坐标标注“Angle[°]”ylabel('Torque[N\cdotm]');%纵坐标标注“Torque[N ·m]”title('三相隐极同步电动机矩角特性');%标题“三相隐极同步电动机矩角特性”【仿真实例3-1】解:根据例题3-1的解得该电动机固有机械特性方程为1230123061972.ss ..s s s s T T mm m +=+=编制绘制该电动机固有机械特性的M 文件程序如下:clc clear n1=1500;%输入同步转速s=0:0.005:1;%转差率变化范围0~1,间隔0.005T=197.6./(0.123./s+s./0.123);%计算电磁转矩Subplot(1,2,1)%按照1行2列绘制子图1plot(s,T,'k-');%绘制机械特性xlabel('转差率{\its}');%横坐标标注“转差率s ”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T /(N·m)”title('异步电动机固有机械特性{\itT}={\itf}({\its})')%标注标题“T =f (s )”n=n1.*(1-s);%计算转速Subplot(1,2,2)%按照1行2列绘制子图2plot(T,n,'k-');%绘制机械特性xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T /(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n /(rpm)”title('异步电动机固有机械特性{\itn}={\itf}({\itT})')%标注标题“n =f (T )”hold on;%保持当前坐标轴和图形【仿真实例3-2】解:用M 语言编写绘制【例3-2】人为机械特性曲线的MATLAB 程序如下:clc clear m1=3;%异步电动机相数U1=220;%定子相电压n1=1000;%输入同步转速p=2;%极对数f1=50;%电源频率r1=2.08;%定子绕组电阻r2=1.53;%转子绕组电阻折算值w1=2*pi*f1/p;%计算同步角速度,单位:rad/sx1=3.12;%定子漏电抗x2=4.25;%转子漏电抗折算值s=0:0.005:1;%设定转差率变化范围:0~1,间隔0.005n=n1.*(1-s);%计算转速T=(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,1)%按2行2列绘制子图plot(s,T,'k');%绘制固有机械特性曲线xlabel('转差率{\its}');%横坐标标注“转差率s”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T/(N·m)”str_x=0.25;%标注字符的横坐标text(str_x,max(T),strcat('U1=',num2str(int16(U1)),'V'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电压值title('降低定子电压的人为机械特性')%标题“降低定子电压的人为机械特性”hold on;%保持当前坐标轴和图形subplot(2,2,2)%按2行2列绘制子图2plot(T,n,'k');%绘制固有机械特性曲线hold on;xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T/(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n/(rpm)”text(max(T)-20,500,strcat('U1=',num2str(int16(U1)),'V'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电压值title('降低定子电压的人为机械特性')%标题“降低定子电压的人为机械特性”str_y=500;%设定字符串的纵坐标初值for coef=0.75:-0.25:0.25;%设定降低定子电压的范围U1p=U1*coef;%降低定子电压T1=(m1*p*U1p^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,1)%按2行2列绘制子图1plot(s,T1,'k-');%绘制降低定子电压人为机械特性str=strcat('U1=',num2str(int16(U1p)),'V');%创建标注字符串text(str_x,max(T1)+5,str,'FontSize',9,'Color','black');%标记各曲线的电压值subplot(2,2,2)%按2行2列绘制子图2plot(T1,n,'k-');%绘制降低定子电压人为机械特性str=strcat('U1=',num2str(int16(U1p)),'V');%创建标注字符串str_y=str_y+100;%修改字符串的纵坐标值text(max(T1)-5,str_y,str,'FontSize',9,'Color','black');%标记各曲线的电压值endsubplot(2,2,3)%按2行2列绘制子图3plot(s,T,'k-');%绘制固有机械特性曲线xlabel('转差率{\its}');%横坐标标注“转差率s”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T/(N·m)”str_x=0.75;%标注字符的横坐标text(str_x,max(T)-45,strcat('r2=',num2str(r2),'\Omega'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电阻值title('改变转子电阻的人为机械特性')%标题“改变转子电阻的人为机械特性”hold on;%保持当前坐标轴和图形subplot(2,2,4)%按2行2列绘制子图4plot(T,n,'k-');%绘制固有机械特性曲线hold on;xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T/(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n/(rpm)”text(50,400,strcat('r2=',num2str(r2),'\Omega'),'FontSize',9,'Color','black');%标注固有机械特性曲线的电阻值title('改变转子电阻的人为机械特性')%标题“改变转子电阻的人为机械特性”r2p=r2;%设定改变的转子电阻的初值str_y1=400;%设定字符串的纵坐标初值for coef=1:4;%设定改变转子电阻的范围r2p=r2p+0.75;%改变转子电阻T1=(m1*p*U1^2*r2p)./s./(w1.*((r1+r2p./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,3)%按2行2列绘制子图3plot(s,T1,'k-');%绘制改变转子电阻人为机械特性str=strcat('r2=',num2str(r2p),'\Omega');%创建标注字符串str_y=T1(length(T1))-5;%标注字符串的纵坐标值text(str_x,str_y+11,str,'FontSize',9,'Color','black');%标记各曲线的电阻值subplot(2,2,4)%按2行2列绘制子图4plot(T1,n,'k-');%绘制改变转子电阻人为机械特性str=strcat('r2=',num2str(r2p),'\Omega');%创建标注字符串str_y1=str_y1-90;%修改字符串的纵坐标值text(50+coef*8,str_y1,str,'FontSize',9,'Color','black');%标记各曲线的电阻值end【仿真实例4-1】解:用M语言编写绘制直流发电机空载特性曲线的MATLAB程序如下:%绘制直流发电机空载特性曲线问题clcclearIfdata1=[0.0,0.5,0.7,0.8,1.0,1.2,1.5];Ifdata2=[0.0,0.5,0.7,0.8,1.0,1.2,1.5];%励磁电流I f值U0data1=[2,75,93.5,99,106,111.5,117];U0data2=[18,83.6,97.5,102.5,109.5,114,117];%空载电压U0值xdata=0:.1:1.5;%y坐标0~120ydata1=interp1(Ifdata1,U0data1,xdata,'spline');ydata2=interp1(Ifdata2,U0data2,xdata,'spline');%采用样条插值的方法分析数据plot(Ifdata1,U0data1,'*')%用'*'描点绘制空载特性hold on;%保持当前坐标轴和图形plot(Ifdata2,U0data2,'*')%绘制I f,U0坐标hold on;plot(xdata,ydata1);%绘制x,y坐标hold on;%保持当前坐标轴和图形plot(xdata,ydata2);%绘制x,y坐标hold on;%保持当前坐标轴和图形title('直流发电机空载特性')%标题'直流发电机空载特性' xlabel('{\itI}_f(A)')%x坐标标签'I f(A)'ylabel('{\itU}_0(V)')%y坐标标签'U0(V)'axis([0,2,0,120])【仿真实例4-2】解:用M语言编写绘制他励直流发电机外特性曲线的MATLAB程序如下:%绘制他励直流发电机外特性曲线问题clcclearIdata=[0,4.3,7,8.8,13,15,17];%负载电流I值Udata=[118,116,114,112.5,110,108.5,107];%负载电压U值xdata=0:1:17;%x坐标0~17ydata=interp1(Idata,Udata,xdata,'spline');%采用样条插值的方法分析数据plot(Idata,Udata,'*');%用'*'描点绘制外特性hold on%保持当前坐标轴和图形plot(xdata,ydata);%绘制x,y坐标hold on%保持当前坐标轴和图形title('他励直流发电机外特性')%标题'他励直流发电机外特性' xlabel('{\itI}(A)')%x坐标标签'I(A)'ylabel('{\itU}(V)')%y坐标标签'U(V)'axis([0,20,0,150])%设置轴线数据范围【仿真实例4-3】解:用M语言编写绘制并励直流发电机外特性曲线的MATLAB程序如下:%绘制并励直流发电机外特性曲线问题clcclearnN=1500;IfN=1.4;Rf=75;Ra=2.3;%输入发电机基本数据Ifdata=[0,0.5,0.7,0.8,1.0,1.2,1.5];%输入励磁电流U0data=[5,75,95,100,108,110,117];%输入空载电压If=0:0.01:12;%重新设置励磁参数P=polyfit(Ifdata,U0data,3);U0=polyval(P,If);%空载特性曲线拟合U=If*Rf;%计算电枢端电压Ia=(U0-U)/Ra;%计算电枢电流I=Ia-If;%计算负载电流plot(I,U)%绘制并励直流发电机外特性hold on%保持当前坐标轴和图形title('并励直流发电机外特性')%标题'并励直流发电机外特性'axis([0,20,0,120])%设置轴线数据范围xlabel('{\itI}(A)')%x坐标标签'I(A)'ylabel('{\itU}(V)')%y坐标标签'U(V)'【仿真实例4-4】解:用M语言编写仿真并励直流发电机自励过程和求稳态电压的MATLAB程序如下:%仿真并励直流发电机自励过程和求稳态电压问题%sh_ge_se_ex_ode函数的M文件function dydt=sh_ge_se_ex_ode(~,iff)%定义该M—函数为sh_ge_se_ex_ode,即%shunt_generator_self_excited_odeglobal a1a2a3a4Rf%指定全局变量Lf=40;Rf=75;%输入发电机基本数据Ifdata=[0,0.5,0.7,0.8,1.0,1.2,1.5];%输入励磁电流实验数据U0data=[5,75,95,100,108,110,117];%输入感应电动势数据a=polyfit(Ifdata,U0data,3);%曲线拟合dydt=1/Lf*(a(1)*iff^3+a(2)*iff^2+a(3)*iff^1+a(4))-Rf/Lf*iff;%列写标准形式微分方程并将感应电动势用%励磁电流的拟合多项式函数表示a1=a(1);a2=a(2);a3=a(3);a4=a(4);%给全局变量赋值%脚本M文件[t,iff]=ode23(@sh_ge_se_ex_ode,[010],[0]);%选择微分方程解算指令ode23()global a1a2a3a4Rf%指定全局变量subplot(3,1,1),%定义绘制仿真曲线1ea=a1*iff.^3+a2*iff.^2+a3*iff.^1+a4;%求感应电动势plot(iff,ea)%绘制e a=f(I f)曲线hold on%保持当前坐标轴和图形uf=Rf.*iff;%计算u fplot(iff,uf,'g')%用绿颜色绘制u f=f(i f)场阻线title('并励直流发电机自励过程')%标题'并励直流发电机自励过程'xlabel('{\itI}_f(A)')%曲线1x坐标标签'I f(A)'ylabel('{\itE}_a/{\itU}_f(V)')%曲线1y坐标标签'E a/U f(V)'axis([0,1.6,0,150])%设置x、y坐标值subplot(3,1,2)%定义绘制曲线2plot(t,iff);%绘制曲线2即i f=f(t)xlabel('{\itt}(s)')%曲线2x坐标标签't(s)'ylabel('{\itI}_f(A)')%曲线2y坐标标签'I f(A)'axis([0,5,0,2])subplot(3,1,3),%定义绘制曲线3plot(t,(a1*iff.^3+a2*iff.^2+a3*iff.^1+a4));%绘制e a曲线xlabel('{\itt}(s)')%曲线3x坐标标签't(s)'ylabel('{\ite}_a(V)')%曲线3y坐标标签'e a(V)'iff,a1*iff.^3+a2*iff.^2+a3*iff.^1+a4;%计算励磁电流和感应电动势的数值axis([0,5,0,150])【仿真实例4-5】解:用M语言编写绘制他励直流电动机工作特性的MATLAB程序如下:%绘制他励直流电动机工作特性问题clcclearUN=220;PN=22;IaN=115;Nn=1500;%输入电动机参数Ra=0.21;%输入电枢电阻CePhiN=(UN-Ra*IaN)/Nn;%计算电动势常数C eΦNCTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNIa=0:IaN;%电枢电流从0~额定电流I aNn=UN/CePhiN-Ra/(CePhiN)*Ia;%计算转速TN=CTPhiN*Ia;%计算电磁转矩TNP=TN*10;%为清楚起见,将电磁转矩扩大十倍显示plot(Ia,n,'b.-',Ia,TNP,'r.-');%绘制转速特性和转矩特性曲线xlabel('电枢电流{\itI}_a/A')%横坐标标签'电枢电流I a/A'ylabel('转速{\itn}/rpm,电磁转矩{\itT}/N.m')%纵坐标'转速n/rpm,电磁转矩T/N.m' text(30,1500,'转速{\itn}');%标记转速曲线text(50,500,'电磁转矩{\itT}(X10)');%标记转矩曲线【仿真实例4-6】解:用M语言编写绘制串励直流电动机工作特性的MATLAB程序如下:%绘制串励直流电动机工作特性问题clcclearUN=220;PN=22;IaN=115;Nn=1500;%输入电动机参数Ra=0.18;%输入电枢电阻Rf=0.31;%输入励磁电阻k=0.01;%输入比例常数CePhiN=(UN-(Ra+Rf)*IaN)/Nn;%计算电动势常数C eΦNCe=CePhiN/k/IaN;%计算电动势常数C eIa=0:IaN;%电枢电流从0~额定电流I aNn=UN./(Ce*k.*Ia)-(Ra+Rf)/(Ce*k);%计算转速start_p=30;%设置显示的起始点Ia_p=Ia(start_p:length(Ia));%截取电流显示区间n_p=n(start_p:length(n));%截取转速显示区间CTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNCT=CTPhiN/k/IaN;%计算电磁转矩常数C TTN=CT*k*Ia.*Ia;%计算电磁转矩TNP=TN*30;%为清楚起见,将电磁转矩扩大三十倍显示plot(Ia_p,n_p,'b.-',Ia,TNP,'r.-');%绘制转速特性和转矩特性曲线xlabel('电枢电流{\itI}_a/A')%横坐标标签'电枢电流I a/A'ylabel('转速{\itn}/rpm,电磁转矩{\itT}/N.m')%纵坐标标签'转速n/rpm,电磁转矩T/N.m' text(40,5500,'转速\itn');%标记转速曲线text(15,1000,'电磁转矩{\itT}(X30)');%标记转矩曲线【仿真实例5-1】解:用M语言编写绘制他励直流电动机机械特性的MATLAB程序如下:clcclearPN=22,UN=220,IN=115,nN=1500,Ra=0.21;%输入铭牌数据IaN=IN;%计算电枢电流CePhiN=(UN-Ra*IaN)/nN;%计算电动势常数C eΦNCTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNIa=0:IaN;%建立电枢电流数组n=UN/CePhiN-Ra/(CePhiN)*Ia;%计算转速T=CTPhiN*Ia;%计算电磁转矩figure(1);%建立1号图形窗口plot(T,n,'.-');%绘制固有机械特性曲线title('固有机械特性');%标题'固有机械特性'xlabel('电磁转矩{\itT}/N\cdotm');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpm');%纵轴标注'转速n/rpm'ylim([0,1800]);%限制纵轴显示范围figure(2);%建立2号图形窗口plot(T,n,'rd');%绘制固有机械特性曲线title('降低电枢电源电压的人为机械特性');%标题'降低电枢电源电压的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形for jy=1:-0.25:0.25;U=UN*jy;%改变电枢电源电压n=U/CePhiN-Ra/(CePhiN*CTPhiN)*T;%计算对应不同电枢电源电压的转速plot(T,n,'-');%绘制改变电枢电源电压的人为机械特性str=strcat('{\it U}=',num2str(U),'V');%显示字符串处理y=1700*jy;%显示字符串纵坐标text(60,y,str);%给曲线标注电压值endfigure(3);%建立3号图形窗口Rc=0;%临时变量n=UN/CePhiN-(Ra+Rc)/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'rd');%绘制固有机械特性曲线title('电枢回路串电阻的人为机械特性');%标题'电枢回路串电阻的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形Rc=0.02;%电枢串电阻值for Rc=0:0.5:1.9;n=UN/CePhiN-(Ra+Rc)/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'-');%绘制电枢回路串电阻的人为机械特性str=strcat('{\it R}=',num2str(Ra+Rc),'\Omega');%字符串处理y=400*(4-Rc*1.8);%显示字符串的纵坐标text(120,y,str);%给各曲线标记电阻值endylim([0,1700]);%限制纵轴显示范围figure(4);%建立4号图形窗口n=UN/CePhiN-Ra/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'rd');%绘制固有机械特性曲线title('减弱磁通的人为机械特性');%标题'减弱磁通的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形for ct=0.5:0.25:1.3;CePhi=CePhiN*ct;CTPhi=CTPhiN*ct;%改变磁通值n=UN/CePhi-Ra/(CePhi*CTPhi)*T;%计算转速plot(T,n,'-');%绘制改变磁通时的人为机械特性str=strcat('{\it\phi}=',num2str(ct),'*\phi_N');%显示字符串处理y=3600-1850*ct;%显示字符串纵坐标text(120,y,str);%给各曲线标记磁通endylim([0,3600]);%限制纵坐标的显示范围。
MATLAB原理及应用实验报告第四章答案
《MATLAB 原理及应用》实验报告三.课后练习题答案1.为 ⎪⎩⎪⎨⎧<-=>+=01001x x x xx x y 编写赋值程序。
程序如下:①建立如下的M 文件:x=input('x=');%让用户通过键盘输入数值、字符串或表达式if x>0y=x+1;elseif x==0y=x;else x<0y=x-1;e nd程序执行结果如下>> kh1 %在当前工作目录下,文件名为“kh.1.m ” x=1>> yy =22.使用for ... end循环的array向量编程求出1+3+5...+100 的值程序如下:sum=0;>> for k=1:2:100sum=sum+k;end>> sumsum =25003.计算1+3+5...+100 的值,当和大于1000时终止计算。
程序如下:sum=0;for m=1:2:100; %建立1 3 5….100的向量if sum<=1000 %如果sum小于1000则可以继续加sum=sum+m; %累加elsebreak; %若sum的结果不符合条件就跳出整个循环endend结果为:sum =1024k =653.1计算从1开始多少个自然数之和超过100。
程序如下:>> sum=0;n=0;>> while sum<=100n=n+1;sum=sum+n;end结果为:n =14sum =1054.求1!+2!+3!+……+8!的值程序如下:n=1;sum=1;for m=2:8; %循环7次使得得到各次阶乘n=n*m;sum=sum+n; %累加end结果为:sum =462335.写程序,判断一年是否为闰年,符合下面两条件之一:(1990~2014)A、能被4整除,不能被100整除B、能被400整除程序如下count=0;for y=1990:2014;if((rem(y,4)==0&rem(y,100)~=0)|(rem(y,4)==0&rem(y,400)~=0));count=count+1;endend结果为:count =5。
电机与拖动第4章

第4章 思考题与习题答案1.三相笼形异步电动机由哪些部件组成各部分的作用是什么答:三相笼形异步电动机由定子和转子两部分组成。
定子产生旋转磁场,转子产生电磁转矩2.为什么三相异步电动机定子铁芯和转子铁芯均用硅钢片叠压而成能否用钢板或整块钢制作为什么答:用硅钢片叠压而成是为了减小铁损。
铁心不能用钢板或整块钢制作,因为铁心损耗较大。
3.什么是旋转磁场旋转磁场是如何产生的答:三相定子绕组通入三相交流电,则在定子、转子与空气隙中产生一个沿定子内圆旋转的磁场,该磁场称为旋转磁场。
它是三相对称的定子绕组通入三相对称的交流电而产生的。
4.如何改变旋转磁场的转速和转向答:改变电源频率、磁极对数均可改变旋转磁场的转速。
将I A —I B —I C 中的任意两相A 、B 互换,均可改变旋转磁场的转向。
5.说明三相异步电动机的工作原理,为什么电动机的转速总是小于旋转磁场的转速 答:三相异步电动机的工作原理:当定子本相绕组通人三相电流后,定子绕组产生旋转磁场。
该磁场以同步转速在空间顺时针方向旋转,静止的转子绕组被旋转磁场的磁力线所切割,产生感应电动势,在感应电动势的作用下,闭合的转子导体中就有电流转子电流与旋转磁场相互作用的结果便在转子导体上产生电磁作用力F ,电磁作用力F 对转轴产生电磁转矩M ,使转子转动。
当定子绕组接通三相交流电时,转子便逐步转动起来,但其转速不可能达到同步转速。
如果转子转速达到同步转速,则转子导体与旋转磁场之间就不再存在相互切割运动。
就没有感应电动势和感应电流,也没有电磁转矩,转子转速就会变慢。
因此在电动机运转状态下,转子转速总是低于其同步转速。
6.一台三相异步电动机,型号为Y2-160M2-2,额定转速为n =2?930r/min ,f 1=50Hz ,求转差率s 。
解:由Y2-160M2-2可知p=1,另外n 1=60f/p=60×50/1=3000 r/min而 S=(n 1- n 2)/ n 1=(3000-2930)/3000=。
机电系统仿真第四章习题答案1
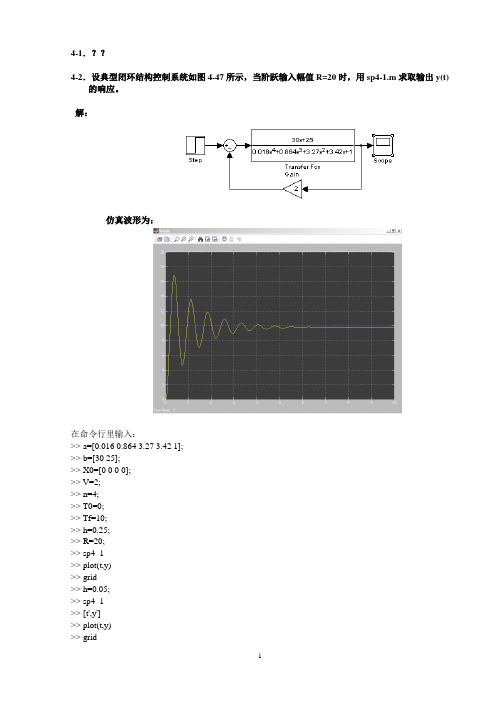
4-2.设典型闭环结构控制系统如图4-47所示,当阶跃输入幅值R=20时,用sp4-1.m求取输出y(t)的响应。
解:仿真波形为:在命令行里输入:>> a=[0.016 0.864 3.27 3.42 1];>> b=[30 25];>> X0=[0 0 0 0];>> V=2;>> n=4;>> T0=0;>> Tf=10;>> h=0.25;>> R=20;>> sp4_1>> plot(t,y)>> grid>> h=0.05;>> sp4_1>> [t',y']>> plot(t,y)>> grid“注意h值的选取,太大时将画不出波形!!”附:sp4_1.m函数为b=b/a(1);a=a/a(1);A=a(2:n+1);A=[rot90(rot90(eye(n-1,n)));-fliplr(A)];B=[zeros(1,n-1),1]';m1=length(b);C=[fliplr(b),zeros(1,n-m1)];Ab=A-B*C*V;X=X0';y=0;t=T0;N=round((Tf-T0)/h);for i=1:NK1=Ab*X+B*R;K2=Ab*(X+h*K1/2)+B*R;K3=Ab*(X+h*K2/2)+B*R;K4=Ab*(X+h*K3)+B*R;X=X+h*(K1+2*K2+2*K3+K4)/6;y=[y,C*X];t=[t,t(i)+h];end4-3.试说明系统中比例环节、纯微分环节对式(4-10)中Q阵的逆的存在有何影响.解:(1)若为比例环节,A(i)=常数,B(i)=0,C(i)=常数,D(i)=0,G(i)=B(i)/A(i)举例如下:00000000000a c e f g Bb D d W h i jk l ma ce cf cgQ B DW dh b di dj⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦---⎡⎤⎢⎥=-=---⎢⎥⎢⎥⎣⎦Q=不存在可逆矩阵(2)若为纯微分环节,A(i)=B(i)=0,C(i)=常数,D(i)=常数举例如下:,0a c e f g B b D d W h i j n k l m a ce cf cg Q B DW dh b di dj Q nk nl nm ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦---⎡⎤⎢⎥=-=---=⎢⎥⎢⎥---⎣⎦不定所以Q 可逆性质不定%只有当系统中有纯比例、纯微分环节时, Q 有可能存在全零行,导致不可逆%4-4.系统结构图如图4-48,写出该系统的联结矩阵W 和0W ,并写出联结矩阵非零元素阵IJ W 。
电机与拖动基础及MATALB仿真(陈亚爱 周京华编著)习题答案第4章

直流电机原理4.1试说出直流电机定、转子由哪些部件组成以及各部件的作用?(1)定子:定子由主磁极、换向极、电刷装置、机座等组成。
主磁极:主磁极铁心和励磁绕组组成,外套励磁绕组。
主磁极的作用是建立主磁场。
换向极:由铁心和绕组组成,作用是改善电机的换向。
电刷装置:电刷、刷握、刷杆、压紧弹簧等组成,作用是连接转动和静止之间的电路。
机座:固定主磁极等部件,同时也是磁路的一部分。
(2)转子(电枢):转子由电枢铁心、电枢绕组、换向器、转轴等组成。
电枢铁心:由硅钢片叠压而成,作用是嵌放电枢绕组,同时又是电机主磁路的一部分。
电枢绕组:由绝缘导线绕制成的线圈(元件),元件的两个出线端分别与两个换向片相连。
电枢绕组的作用是产生感应电动势和电磁转矩,是实现机电能量转换的枢纽。
换向器:由许多相互绝缘的换向片组成。
作用是将电枢绕组中的交流电整流成刷间的直流电或将刷间的直流电逆变成电枢绕组中的交流电。
(3)气隙:定子和转子之间的间隙,也是主磁路的一部分。
4.2直流电机换向器和电刷起什么作用?答:对直流电动机来说,换向器和电刷的共同作用:①将刷间的直流电逆变成线圈中的交流电;②把外面不转的电路与转动的电路连接起来。
对直流发电机来说,换向器和电刷的共同作用:①将线圈中的交流电动势整流成刷间的直流电动势;②把转动的电路与外面不转的电路联接。
4.3在直流发电机中电刷两端的电动势为直流,电枢绕组中的电动势为交流还是直流?为什么?答:电枢绕组中的电势为交流电。
电刷通过换向片与导体连接,一对电刷中的一个电刷总是与N极下的导体连接,另一个电刷总是与S极下的导体连接。
根据电磁感应定律,当电机的转轴朝某一方向旋转时,在N极的导体产生电势与S极下导体产生的电势方向总是相反,也就是绕组中的电势为交流电,但由于静止的电刷通过运动的换相片与导体相连,这样虽然导体中的电势是交流的,但从电刷两端引出的电势为直流的。
4.4在直流电动机中外加的刷间电压已是直流,为什么还需加装电刷和换向片?答:需要将外部答直流电转换成绕组内部需要的交流电,以产生电磁转矩和感生电动势。
电机与拖动基础 课件课后习题答案

260 Ea 85 110.5V 200
电压方程为: 110.5 Ia (50 4.3); Ia 2.035 A
2 负载功率为: P 2 Ia RL 207W
电机与拖动
3-21 并励直流发电机PN=16kW,UN=230V,IN=69.3A, nN=1600r/min,ηN =88.5%,Ra=0.128Ω,励磁回路 Rf=150Ω。求额定状态下If,Ia,Ea,pCua,pCuf,p0,输 入转矩T1,Tem,T0。 解:
m共 2 (m m1) m2 2 280 1.6 6396Kg
2 D 2 6396kg m 2 转动惯量为: JL m m共 4
电动机
系统折算后总转动惯量:
Jeq JL 2J Jm 2 J M 49.74kg m i2
H
4-9 一台500V直流发电机,nN=1000r/min,输出功率 50kW,Ia=0.4Ω。接至200V电网做电动机,磁通及Ia额定, 求:(1) 电动机转速。(2) Ia额定,n=1000r/min,磁通及 电磁转矩为额定时的多少倍?
解:发电机时电枢电压方程为: Eag U IaRa 540V 电动机时电枢电压方程为:Eam U IaRa 160V
100 10 10 r 2 Z 2 cos 1 10 0.5 5; x 2 Z 2 sin 1 8.66; Z2
(2)
电机与拖动
1-7:若1-6中漏磁可忽略,且铁心磁通Φ=0.0022sin314tWb, 计算线圈每匝感应电势?要获得36V的电压电源,铁心应绕 一个多少匝的线圈? 解:每匝电势为:
220 78.79 350 (0.032 Rc)
许晓峰《电机拖动》第四章习题

第四章三相异步电动机思考题与习题4.1 三相异步电动机为什么会旋转,怎样改变它得转向、4、2 什么就是异步电动机得转差率?如何根据转差率来判断异步电机得运行状态?4。
3 在三相绕线转子异步电动机中,如将定子三相绕组短接,并且通过滑环向转子绕组通入三相交流电流,转子旋转磁场若为顺时针方向, 问这时电动机能转吗?如能旋转,其转向如何?4.4 异步电动机为什么又称感应电动机?4.5 异步电动机中得空气隙为什么做得很小?4、6 假如有一台星形联结得三相异步电动机,在运行中突然切断三相电流,并同时将任意两相定子绕组(如U、V相)立即接入直流电源, 这时异步电动机得工作状态如何,试画图分析。
4、7 一台三相单层绕组电机,极数2 p=4,定子槽数Z=36,每相并联支路数a=2,试列出6 0。
相带得分相情况,并画出三相单层交叉式绕组展开图。
4、8 —台交流电机,Z = 36 , 2 p=4, y =7,a=2、试列出6 0°相带分相情况,并画出双层叠绕组得展开图。
4。
9 试述短距系数k y1与分布系数k q1得物理意义?4。
1 0 交流电机一相绕组电动势得频率、波形、大小与哪些因素有关?哪些由构造决定?哪些由运行条件决定?4。
1 1 一台三相双层绕组电机,Z=36,2p= 4角=50H z,y1=7/9T ,试求基波、五次谐波与七次谐波得绕组系数,若完全消除五次谐波分量,y i应取多少?实际中,本题采用短距得方法能否将五次谐波电动势完全消除?4.12 一台4极,Z =36得三相交流电机,采用双层叠绕组,a= 1,y i =7/ 9T ,每个线圈匝数N c= 20,每极气隙基波磁通①1 =7、5 X 10- 3W b,试求每相绕组基波电动势得大小?4、1 3 交流电机单相绕组基波磁动势得幅值大小、位置与脉动频率与哪些因素有关?其中哪些因素由构造决定?哪些由运行条件决定?4、14 交流电机三相绕组合成基波圆形旋转磁场得幅值、空间位置、转速与转向各与哪些因素有关?其中哪些因素由构造决定?哪些由运行条件决定?4。
电机及拖动基础第4版思考题与习题解答
思考题与习题解答《电机及拖动基础》(4版)第一章直流电机1-1 在直流电机中,电刷之间的电动势与电枢绕组某一根导体中的感应电动势有何不同?解:前者是方向不变的直流电动势,后者是交变电动势;前者由多个电枢元件(线圈)串联而成,电动势相对后者的绝对值要大。
1-2 如果将电枢绕组装在定子上,磁极装在转子上,则换向器和电刷应怎样放置,才能作直流电机运行?解:换向器放置在定子上,电刷放置在转子上,才能作直流电机运行1-3 直流发电机和直流电动机中的电磁转矩T 有何区别?它们是怎样产生的?而直流发电机和直流电动机中的电枢电动势,a E 又有何区别?它们又是怎样产生的?解:直流发电机的电磁转矩T 是制动性质的,直流电动机的电磁转矩T 是驱(拖)动性质的,它们都是由载流导体在磁场中受到的电磁力,形成了电磁转矩;直流发电机的电枢电动势E a 大于电枢端电压U ,直流电动机的电枢电动势E a 小于电枢端电压U ,电枢电动势E a 都是运动导体切割磁场感应产生的。
1-4 直流电机有哪些主要部件?各起什么作用?解:直流电机的主要部件有定子:主磁极(产生主极磁场)、机座(机械支撑和导磁作用)、换向极(改善换向)、电刷(导入或导出电量);转子:电枢铁心(磁路的一部分,外圆槽中安放电枢绕组)、电枢绕组(感应电动势,流过电流,产生电磁转矩,实现机电能量转换)、换向器(与电刷一起,整流或逆变)1-5 直流电机里的换向器在发电机和电动机中各起什么作用?解:换向器与电刷滑动接触,在直流发电机中起整流作用,即把线圈(元件)内的交变电整流成为电刷间方向不变的直流电。
在直流电动机中起逆变作用,即把电刷间的直流电逆变成线圈(元件)内的交变电,以保证电动机能向同一个方向旋转。
1-6 一台直流发电机,min,/1450,230,145r n V U kW P N N N ==-求该发电机额定电流。
解: A U P I N N N 43.630230101453=⨯==1-7 一台Z4-250-42他励直流电动机,min,/1000%,46.90,440,160r n V U kW P N N N N ===-η求其额定电流和额定负载时的输入功率。
电机与拖动第4章习题解答

虽然 Tst﹥TL,但 Ist﹥150A,故不可以带此负载直接起动.
4.3.3 解:(1) Tst=αstTN=1.8TN﹥TL =0.8TN Ist=αscIN=6×63=378A 变压器的额定电流
=
1.97
2
= 0.054或Ω)
200 ×103 I Nt = = = 303.88( A) 3U N 3 × 380 sN
虽然 Tst﹥TL,但 Tst﹥INt,故不可以直接起动. (2)
1 1 TstY = Tst = × 1.8TN = 0.6TN 3 3
由于 TstY﹤TL,故不可以采用星形-三角形起动.
2 2 (3) Tsta = K ATst =0.73 × 1.8TN = 0.96TN
αMT − αMT 2 −1 2.4 − 2.42 −1
2 T 85.75 85.75 2 TM M s=sM − −1 = 0.0916 × − −1 = 0.0227 T 40 40 T n=(1-s)n 0=(1 -0.0227) × 3000=2932 r/min) (
TN = 9.55
TM = α MT TN = 2.1 × 64.97 = 136.44( N m) sM =
α MT − α MT − 1
2
2 2 T 136.5 T 136.5 s=s M M − M − 1 = 0.0789 × − − 1 = 0.0183 T 60 T 60 n=(1- s)n 0= (1-0.0183 ) × 1500=1473 r/min) (
matlab课后习题答案第四章
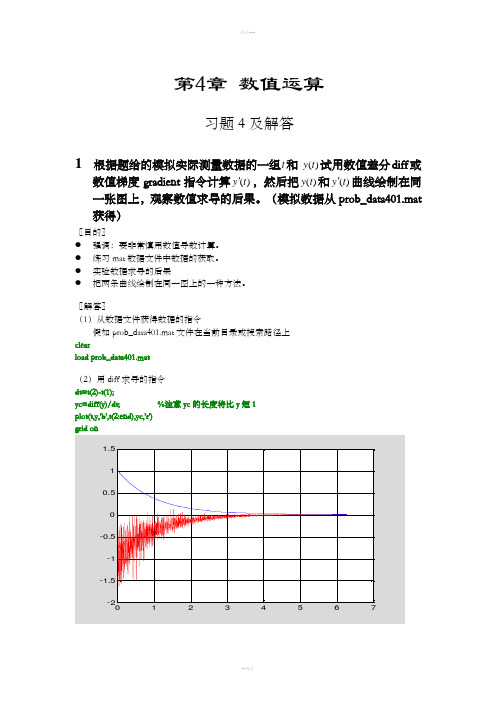
第4章数值运算习题 4 及解答1 根据题给的模拟实际测量数据的一组t和)(t y试用数值差分diff或数值梯度gradient指令计算)(t y',然后把)(t y和)(t y'曲线绘制在同一张图上,观察数值求导的后果。
(模拟数据从prob_data401.mat 获得)〖目的〗●强调:要非常慎用数值导数计算。
●练习mat数据文件中数据的获取。
●实验数据求导的后果●把两条曲线绘制在同一图上的一种方法。
〖解答〗(1)从数据文件获得数据的指令假如prob_data401.mat文件在当前目录或搜索路径上clearload prob_data401.mat(2)用diff求导的指令dt=t(2)-t(1);yc=diff(y)/dt; %注意yc的长度将比y短1plot(t,y,'b',t(2:end),yc,'r')grid on(3)用gradent 求导的指令(图形与上相似)dt=t(2)-t(1);yc=gradient(y)/dt;plot(t,y,'b',t,yc,'r')grid on〖说明〗● 不到万不得已,不要进行数值求导。
● 假若一定要计算数值导数,自变量增量dt 要取得比原有数据相对误差高1、2个量级以上。
● 求导会使数据中原有的噪声放大。
2 采用数值计算方法,画出dt tt x y x ⎰=0sin )(在]10 ,0[区间曲线,并计算)5.4(y 。
〖提示〗● 指定区间内的积分函数可用cumtrapz 指令给出。
● )5.4(y 在计算要求不太高的地方可用find 指令算得。
〖目的〗● 指定区间内的积分函数的数值计算法和cumtrapz 指令。
● find 指令的应用。
〖解答〗dt=1e-4;t=0:dt:10;t=t+(t==0)*eps;f=sin(t)./t;s=cumtrapz(f)*dt;plot(t,s,'LineWidth',3)ii=find(t==4.5);s45=s(ii)s45 =1.65413 求函数x ex f 3sin )(=的数值积分⎰=π0 )(dx x f s ,并请采用符号计算尝试复算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4-14 一台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=87.5%,求电动机的额定电流和额定负载时的输入功率? 解: (1)额定电流
(2)输入功率
4-15 一台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输入功率? 解: (1)额定电流 (2)输入功率
4-16 已知一台直流电机极对数p=2,槽数Z 和换向片数K 均等于22,采用单叠绕组。
试求:(1)绕组各节距;(2)并联支路数。
解:(1)第一节距54
24222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y
第二节距415y 12=-=-=y y
(2)并联支路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,气隙每极磁通Φ=2.1×10-2Wb ,试求:(1)采用单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持支路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联支路对数a=p=3,
电磁转矩 m N I a pN T a ⋅=⨯⨯⨯⨯⨯=Φ=38.1310021.03
14.3240032π 如果把电枢绕组改为单波绕组, 保持支路电流a i 的数值不变,则电磁转矩也不变,仍为 13.369m N ⋅,因为无论是叠绕组还是波绕组,所有导体产生的电磁转矩的方向是一致
的, 保持支路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
也可以用计算的方法: 单叠绕组时并联支路数为6, 支路电流 A I i a a 6106==
改为单波绕组, 保持支路电流a i 的数值不变,仍为
A 610,而并联支路数为2 (a=1), 电枢电流A i I a a 3
102== 电磁转矩 m N T ⋅=⨯⨯⨯⨯⨯=38.133
10021.0114.324003。
A U P I N N N N 79.207875.022010403
=⨯⨯==ηkW
I U P N N 71.4579.2072201=⨯=⨯=A U P I N N N 5.35623010823
=⨯==KW P P N 11.911==η
4-18 一台并励直流发电机额定数据如下:p=2,PN=46kW ,UN=230V , nN=1000r/min ,电枢回路电阻Ra=0.04Ω,励磁回路电阻Rf=30Ω。
若将发电机作电动机运行,所加电源电压UN=220V ,并保持电枢电流为发电机运行时的数值,试求:(1)设磁路不饱和时的电动机转速;(2)作电动机运行时的电磁转矩,并与原发电机运行时的电磁转矩比较大小。
解:(1)额定负载电流A A U P I N N N 200230
46000=== 励磁电流A A R U I f N f 67.730
230=== 电枢电流A I I I f N a 67.207=+=
2383.0=+=ΦN
a a N F n R I U C ε 作电动机运行时:A A R U I f N f 33.730220''===
则2278.02383.0*67
.733.7==
ΦD C ε 磁路不饱和时的电动机转速min)/(3.9292278.067.207*04.0220r n =-= (2)原发电机运行时的电磁转矩
N I C T a F T emF 6.47267.207*2383.0*55.9==Φ=
电动机运行时的电磁转矩N I C T a D D emD 8.45167.207*2278.0*55.9==Φ=
4-19 一台并励直流电动机额定数据如下: UN=220V ,IN=92A ,电枢回路电阻Ra=0.08Ω,励磁回路电阻Rf=89Ω,额定效率ηN=86%,电动机额定运行,试求:(1)输入功率;
(2)输出功率;(3)总损耗;(4)电枢回路铜损耗;(5)励磁回路铜损耗;(6)空载损耗。
解: ( 1 )输入功率 KW W I U P N N 24.2020240922201==⨯==
( 2 )输出功率KW P P 406.1786.024.2012=⨯==η
( 3 )总损耗 KW P P P 834.2406.1724.2021=-=-=∆
(4) A R U I f N f 47.289
220=== A I I I f N a 53.8947.292=-=-= 电枢回路铜损耗 W R I P a a cua 25.64108.053.8922=⨯==
( 5 )励磁回路铜损耗 W R I P f f cuf 98
.5428947.22
2=⨯== ( 6 )空载损耗:
KW P P P cuf 291.298.54228340=-=-∆=
4-20 一台他励直流电动机额定数据如下:PN=100kW ,UN=220V ,IN=517A ,
nN=1200r/min ,电枢回路电阻Ra=0.044Ω。
试求:(1)额定负载时的电枢电动势和电磁转矩;(2)固有机械特性方程;(3)实际空载运行时的电枢电流和空载转矩;(4)理想空载转速和实际空载转速;(5)当电动机轴上负载为75%TemN 时,电动机的转速。
解:(1)电枢电动势和电磁转矩分别为:
)
(8.1961200164.0V n C E N N e a =⨯=⋅=φ)
(7.809517164.055.955.9m N I C T a N e ⋅=⨯⨯=⋅=φ
(2)固有机械特性方程 164.01200
044.0517200=⨯-=⋅-=N a N N N e n R I U C φT T T C C R C U n N T e a N e N 17.01341164.055.9044.0164.022022-=⨯-=-=φφ
3)额定输出转矩和空载转矩
)(8.7951200
1010055.955.932m N n P T N N N ⋅=⨯⨯==)
(9.138.7957.80920m N T T T N ⋅=-=-= 实际空载运行时的电枢电流A C T I N T 87.8164
.0*55.99.1300a ==Φ=
4)理想空载转速和实际空载转速
min)/(13410r C U n N e N ==φ m in)/(6.13389.1317.0134117.013410'0r T n =⨯-=-=
5)负载为75%TemN 时,电动机的转速
min)/(4.1237027.10446.134175.0*)(55.92r T C R C U n N a N N =-=Φ-Φ=
εε。