拟牛顿法
拟牛顿算法

拟牛顿算法
拟牛顿算法是一种求解现代机器学习中复杂优化问题的数值解法,又称为增量式牛顿方法或增量算法。
拟牛顿算法是一种迭代优化算法,它是由美国物理学家Isaac Newton发明的牛顿法的改进版本,并被用于优化复杂的函数。
拟牛顿算法的主要思想是使用一组特定的校正器来更新牛顿法中的参数,从而实现更高效的迭代优化。
拟牛顿算法的基本原理是:拟牛顿算法从一个初始状态开始,通过迭代的方式,不断地更新参数,使目标函数最小化。
首先,使用梯度下降法确定一个起始状态,并计算出目标函数的梯度值,即梯度偏导数。
然后,根据牛顿法构建拟牛顿算法,即在更新参数时,使用牛顿法计算出增量向量,从而实现梯度下降,使目标函数尽可能小。
拟牛顿算法可以用于大多数优化问题,如拟合数据、优化机器学习模型等。
它与牛顿法的速度相比非常快速,大大提高了收敛速度,并具有更好的收敛性能。
另外,拟牛顿算法也可以方便地适用于正则化情况,使优化效率更高。
拟牛顿算法不仅可以用于优化机器学习模型,还可以用于一些复杂的优化问题,如现实世界中的优化问题,例如非线性系统优化、智能机器人的行为优化等。
与牛顿法相比,拟牛顿算法具有空间收敛性更强、更少的迭代次数和更快的收敛速度的优势。
拟牛顿算法的缺点也是显而易见的,它的计算量比传统的牛顿法大,而且它需要一些复杂的算法来更新参数,这也是它不能广泛应用的原因之一。
总而言之,拟牛顿算法是一种求解现代机器学习中复杂优化问题的有效数值解法,它具有高效率和更快的收敛速度的优势。
但是,由于它计算量大,需要较复杂的算法,因此不能广泛应用。
牛顿法拟牛顿法

牛顿法拟牛顿法牛顿法是一种求解非线性方程的方法,其原理是在迭代中使用方程的导数来近似方程的根。
虽然牛顿法非常有效,但它往往需要非常精准的初始猜测才能保证收敛性。
另一种类似于牛顿法的方法是拟牛顿法,它可以通过逐步调整矩阵B来近似牛顿法的矩阵Hessian。
本文将介绍牛顿法和拟牛顿法的原理和应用。
一、牛顿法假设有一个n维非线性方程系统f(x)=0,其中x是一个n维向量。
牛顿法中的每个迭代都是通过以下公式来更新当前估计xk的:xk+1=xk-Hk^(-1)fk其中Hk是f(x)的Hessian矩阵在xk处的值,假设Hk是可逆的。
牛顿法的优点是它快速收敛,并且可以通过适当选择初始估计来实现收敛。
另一个好处是它可以直接用于求解大型系统,因为它只涉及二次导数的计算。
然而,牛顿法的缺点是它需要计算Hessian矩阵,这通常是一个费时且复杂的任务。
另一个问题是当Hessian矩阵的条件数(即最大特征值与最小特征值之比)很大时,牛顿法的收敛可能会变得很慢。
二、拟牛顿法拟牛顿法的思想是利用一个矩阵Bk来代替牛顿法中的Hk矩阵。
Bk是一个正定对称的矩阵,其初值通常为单位矩阵In。
在每个迭代中,Bk被更新为一个近似的Hessian逆矩阵。
最常用的拟牛顿法算法之一是BFGS算法,其更新规则如下:Bk+1=Bk+(yk^Tyk)/(yk^Ts)+(BkSkS^TBk)/(sk^TBksk)其中sk=xk+1-xk,yk=g(xk+1)-g(xk),g表示f的梯度,^T表示矩阵转置。
该公式是基于以下观察得出的:Bk+1应该满足以下性质:Bk+1是正定对称的。
Bk+1应该近似于Hk+1的逆,其应该满足以下方程:Bk+1sk=yk另外,BFGS算法的收敛速度也相对比牛顿法要慢,因为BFGS算法需要逐步修正矩阵Bk,直到其逼近Hessian矩阵的逆。
三、应用牛顿法和拟牛顿法在许多实际问题中应用广泛,特别是在数学、物理、金融和工程领域。
牛顿法和拟牛顿法
解:
f x1
26
x1
x2
22
3 x1
3 x2
x1 x2 3
x2
f x2
26
x1
x2
2 2 3 x1
3x2
x1 x2 3
x1
故
f x1 x 4,6T
344,
f x2
x 4,6T
56,
f
(
x1
)
344 56
.
2 f x12
2 23
x2 2 ,
2 f x22
在确定拟牛顿方程式的Hk+1时,若矩阵Hk+1对称,则需 要待定(n+n2)/2个未知数,n个方程,所以拟牛顿方程 一般有无穷个解,故由拟牛顿方程确定的一族算法,通 常称之为拟牛顿法
拟Newton算法
1、给定初始点x0,正定矩阵H0,精度ε>0,k=0 2、计算搜索方s向k Gk f(x k ) 3、令xk+1=xk+tk.sk,其中
当H 可逆时, k
若 f(x k 1)
,停止x*
xkx+k11=;否xk则-H,k-令1.hk k
k
1,转step2
Step4:
例1. 设 f x 6 x1 x2 2 + 2 3 x1 3 x2 x1 x2 2
求在点 x1 (4, 6)T 处的搜索方向.
分析: 搜索方向
故需要写出 f ( x), 2 f ( x) 的表达式.
Sk
-H
1 k
hk
k 1
其中
H k 2f(x(k )) hk f(x(k ))
1.牛顿法几何解释
几何直观解释:最密切的二次曲线逼近
牛顿法和拟牛顿法

重置 否
x (1 ) = x ( n + 1 )
例4.13:用DFP方法求解 min 2 x + x − 4 x1 + 2
2 1 2 2
初始点x
(1)
2 1 0 = , H1 = 1 0 1
λ1 =
5 18
2 1
8 9 4 9
SQP方法
• 良好的性质 • 广泛应用 • 与Lagrange-Newton 法的关系
总结
简单的“拟”可以 是革命性的进步!
1 v
( k )T
q (k )
∆H k =
p
(k )
⋅p
( k )T (k )
p
( k )TΒιβλιοθήκη q−Hkq q
(k )
⋅q
( k )T
Hk
( k )T
Hkq
(k )
计 算 步 骤:
x (1 ) , ε > 0
H1 = I n , d (1) = −∇f ( x(1) ), k = 1
∇f ( x ( k ) ) < ε
p ( k ) := x ( k +1) − x ( k ) ⇓ q ( k ) := ∇f ( x ( k +1) ) − ∇f ( x ( k ) ) q
(k )
≈ ∇ f (x
2
( k +1)
)p
(k )
p ( k ) = H k + 1q ( k )
p ( k ) ≈ ∇ 2 f ( x ( k +1) ) −1 q ( k )
FletcherDavidon(1959), Fletcher-Powell(1963) DFP 方法
数学优化中的牛顿法和拟牛顿法

数学优化中的牛顿法和拟牛顿法在数学中,优化是一个非常重要的研究领域,其目的是找到使某个函数达到最大或最小值的变量集合。
在实际应用中,很多问题都可以转化为优化问题,如机器学习、经济学、物理学等。
在优化领域中,牛顿法和拟牛顿法是两种常见的方法。
本文将介绍这两种优化方法的基本原理、优缺点以及应用场景。
一、牛顿法牛顿法(Newton's method)是由数学家牛顿发明的非线性优化方法,其思想是利用函数的泰勒级数展开进行逼近。
具体来说,牛顿法先求出目标函数的一阶和二阶导数,然后使用二阶导数来逼近目标函数本身,进而得到近似最优解。
牛顿法的数学公式如下:$$\boldsymbol{x}_{k+1}= \boldsymbol{x}_{k} -{\boldsymbol{\nabla}^2 f(\boldsymbol{x}_k)^{-1}}\boldsymbol{\nabla} f(\boldsymbol{x}_k)$$其中,$\boldsymbol{x}_k$ 表示第 $k$ 次迭代的解,$\boldsymbol{\nabla} f(\boldsymbol{x}_k)$ 和$\boldsymbol{\nabla}^2 f(\boldsymbol{x}_k)$ 分别表示目标函数在$\boldsymbol{x}_k$ 处的一阶和二阶导数。
牛顿法的优点是收敛速度非常快,通常只需要很少的迭代次数即可达到最优解。
另外,牛顿法适用于连续可微、二阶可导的函数,因此适用范围广。
然而,牛顿法也存在一些缺点,例如无法处理不可导或一阶可导但二阶不可导的函数。
此外,牛顿法需要计算目标函数的二阶导数,因此在大规模问题上计算成本很高。
二、拟牛顿法拟牛顿法(quasi-Newton method)是一类基于牛顿法的优化算法,它通过逼近目标函数的海森矩阵来求解。
拟牛顿法没有计算海森矩阵的显式表达式,而是通过估计海森矩阵的变化来逼近。
最简单和最流行的拟牛顿法是BFGS算法和L-BFGS算法。
拟牛顿法
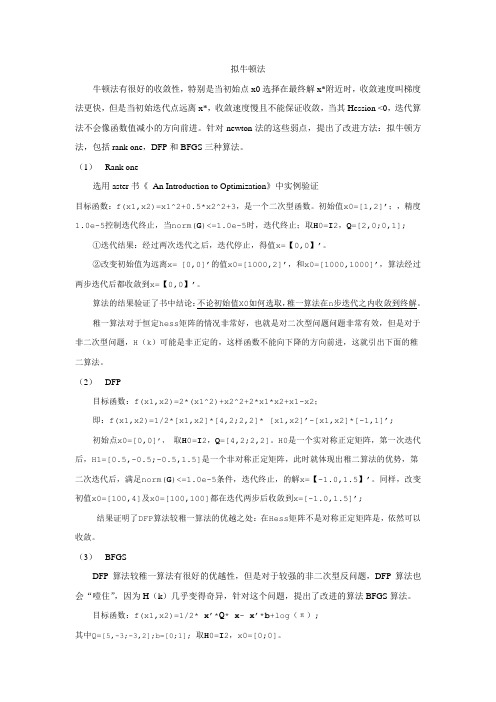
拟牛顿法牛顿法有很好的收敛性,特别是当初始点x0选择在最终解x*附近时,收敛速度叫梯度法更快,但是当初始迭代点远离x*,收敛速度慢且不能保证收敛,当其Hession <0,迭代算法不会像函数值减小的方向前进。
针对newton法的这些弱点,提出了改进方法:拟牛顿方法,包括rank one,DFP和BFGS三种算法。
(1)Rank one选用aster书《An Introduction to Optimization》中实例验证目标函数:f(x1,x2)=x1^2+0.5*x2^2+3,是一个二次型函数。
初始值x0=[1,2]’;,精度1.0e-5控制迭代终止,当norm(G)<=1.0e-5时,迭代终止;取H0=I2,Q=[2,0;0,1];①迭代结果:经过两次迭代之后,迭代停止,得值x=【0,0】’。
②改变初始值为远离x= [0,0]’的值x0=[1000,2]’,和x0=[1000,1000]’,算法经过两步迭代后都收敛到x=【0,0】’。
算法的结果验证了书中结论:不论初始值X0如何选取,稚一算法在n步迭代之内收敛到终解。
稚一算法对于恒定hess矩阵的情况非常好,也就是对二次型问题问题非常有效,但是对于非二次型问题,H(k)可能是非正定的,这样函数不能向下降的方向前进,这就引出下面的稚二算法。
(2)DFP目标函数:f(x1,x2)=2*(x1^2)+x2^2+2*x1*x2+x1-x2;即:f(x1,x2)=1/2*[x1,x2]*[4,2;2,2]* [x1,x2]’-[x1,x2]*[-1,1]’;初始点x0=[0,0]’,取H0=I2,Q=[4,2;2,2]。
H0是一个实对称正定矩阵,第一次迭代后,H1=[0.5,-0.5;-0.5,1.5]是一个非对称正定矩阵,此时就体现出稚二算法的优势,第二次迭代后,满足norm(G)<=1.0e-5条件,迭代终止,的解x=【-1.0,1.5】’。
最优化方法-拟Newton法
0
1 4
0.25
2 X1 0.5,
f ( X1) 5.5
1 f ( X1) 2
(4)判 断 || f ( X 1 ) |,|转(5)
(5)第二次迭代采用DFP变尺度法,构造 E 0
1 0
G0 0
1
1 S0 X1 - X 0 - 0.5
min
f
(X
)
x2 1
2
x2 2
2 x1 x2
4x1
已知 X 0 [1,1]T , 0.1
解:(1)第一次迭代,实际上是沿负梯度方向进行一维搜索。
(2)
f
(
X
)
2x1 2
x1
2x2 4x2
4 ,
4
f ( X0) 2
,G0 I
➢ 5、DFP算法的收敛速度是超线性的。
Relax 做个题,轻松一下
例:用DFP变尺度算法求解无约束最优化问题
min
f
(X
)
x2 1
2
x2 2
2 x1 x2
4x1
已知 X 0 [1,1]T , 0.1
参照:拟Newton法的基本格式做题:
例:用DFP变尺度算法求解无约束最优化问题
三、对称秩1算法 2、对称秩1算法的性质
四、DFP算法(Davidon-Flether-P0well)
四、DFP算法
在DFP算法中,校正矩阵的构造公式为:
Ek
S
k
S
T k
S kTYk
拟牛顿法
•主页•专栏作家•量化基础理论•软件使用经验•量化软件•资源导航•资料下载•量化论坛搜索搜索用户登录用户名:*密码:*登录•创建新帐号•重设密码首页拟牛顿法及相关讨论星期三, 2009-06-17 00:24 —satchel1979使用导数的最优化算法中,拟牛顿法是目前为止最为行之有效的一种算法,具有收敛速度快、算法稳定性强、编写程序容易等优点。
在现今的大型计算程序中有着广泛的应用。
本文试图介绍拟牛顿法的基础理论和若干进展。
牛顿法(Newton Method)牛顿法的基本思想是在极小点附近通过对目标函数做二阶Taylor展开,进而找到的极小点的估计值[1]。
一维情况下,也即令函数为则其导数满足因此(1)将作为极小点的一个进一步的估计值。
重复上述过程,可以产生一系列的极小点估值集合。
一定条件下,这个极小点序列收敛于的极值点。
将上述讨论扩展到维空间,类似的,对于维函数有其中和分别是目标函数的的一阶和二阶导数,表现为维向量和矩阵,而后者又称为目标函数在处的Hesse矩阵。
设可逆,则可得与方程(1)类似的迭代公式:(2)这就是原始牛顿法的迭代公式。
原始牛顿法虽然具有二次终止性(即用于二次凸函数时,经有限次迭代必达极小点),但是要求初始点需要尽量靠近极小点,否则有可能不收敛。
因此人们又提出了阻尼牛顿法[1]。
这种方法在算法形式上等同于所有流行的优化方法,即确定搜索方向,再沿此方向进行一维搜索,找出该方向上的极小点,然后在该点处重新确定搜索方向,重复上述过程,直至函数梯度小于预设判据。
具体步骤列为算法1。
算法1:(1) 给定初始点,设定收敛判据,.(2) 计算和.(3) 若< ,则停止迭代,否则确定搜索方向.(4) 从出发,沿做一维搜索,令.(5) 设,转步骤(2).在一定程度上,阻尼牛顿法具有更强的稳定性。
拟牛顿法(Quasi-Newton Method)如同上一节指出,牛顿法虽然收敛速度快,但是计算过程中需要计算目标函数的二阶偏导数,难度较大。
求解非线性方程的三种新的迭代法

求解非线性方程的三种新的迭代法随着现代科学技术的发展,非线性方程在数学、物理、化学、工程等领域中应用广泛,因此求解非线性方程成为一个重要课题。
传统的求解非线性方程的方法包括二分法、牛顿法、割线法等,但这些方法在一些实际问题中效率不高,甚至可能无法求解出解。
研究人员不断提出新的迭代方法来解决这一问题。
本文将介绍三种新的迭代方法,分别为拟牛顿法、弦截法和混合迭代法。
拟牛顿法是一种经典的非线性方程迭代方法,它是基于牛顿法的改进版本。
牛顿法的迭代公式为:\[x_{n+1}=x_n-\frac{f(x_n)}{f'(x_n)}\]\(f(x)\)是非线性方程的函数,\(f'(x)\)是\(f(x)\)的导数,\(x_n\)是第n次迭代的解。
拟牛顿法的迭代公式为:\[x_{n+1}=x_n-\frac{f(x_n)}{f'(x_n)}+\frac{f(x_n)}{f'(x_n)}\]拟牛顿法相比牛顿法的优势在于不需要计算导数,而是通过近似导数的方式进行迭代。
这样可以减少计算量,提高求解效率。
但是拟牛顿法的收敛性和稳定性需要根据具体问题进行验证,因为在某些情况下可能会出现收敛不到解的情况。
弦截法的思路是通过连接两个不同点的切线来逼近方程的解,它不需要计算导数,而是通过两个不同点的函数值来逼近导数,因此也可以减少计算量。
但是弦截法需要使用两个初值进行迭代,初始值的选择对迭代的效果有很大影响。
在一些情况下,弦截法可能会出现跳过解的情况,因此需要谨慎选择初始值。
混合迭代法是将不同的迭代方法结合起来的一种求解非线性方程的方法。
混合迭代法的思路是通过将不同的迭代方法进行交替使用,来提高收敛速度和稳定性。
例如可以将牛顿法和弦截法结合起来,每次迭代使用不同的方法来求解方程。
混合迭代法的好处是可以充分利用不同迭代方法的优势,提高求解效率。
但是需要注意的是,混合迭代法需要根据具体问题来进行调整,选取合适的迭代策略来保证收敛性和稳定性。
10--拟牛顿法

一般约束问题的一阶最优性条件
考虑
min f (x)
x Rn
s.t.
gi (x) 0, hj (x) 0,
起作用约束:
i 1,...,m j 1,...,l
gi
(i
I
)
;
hj ( j 1,...,l)
hj ( j 1,...,l)
定理(Fritz John条件) :
设x S, f (x)在x处可微,
wi 0
例min f (x) (x1 2)2 x22
s.t.
g1(x) x1 x22 0
g2 (x) x1 x2 0
验证下列两点
x (1)
00和x(2)
1 1
是否为K T点。
x(1)不是;x(2)是
例min f (x) (x1 1)2 x2
s.t.
g1(x) x1 x2 2 0 g2 (x) x2 0
Hkq(k ) )( p(k ) Hkq(k ) )T q(k)T ( p(k) Hkq(k) )
注释
• 在一定条件下,收敛且具有二次终止性。 • 无法保证Hk的正定性;即使能,也有可能导致
△Hk无界。
DFP算法
秩为
Hk k u(k) u(k)T kv(k) v(k)T
2
p(k ) H k1q(k )
2
f ( x) f ( x(k1) ) 2 f ( x(k1) )(x x(k1) )
f ( x(k) ) f ( x(k1) ) 2 f ( x(k1) )(x(k) x(k1) ) p(k ) : x(k 1) x(k ) q(k ) : f (x(k 1) ) f (x(k ) ) q(k ) 2 f (x(k 1) ) p(k )
例题是唐老师教材_1025_拟牛顿法(DFP算法)
)
Step4: 令 k
k 1,
返回Step2.
注: 第一步迭代与最速下降法相同.
三. 对称秩2算法(DFP校正公式)
设校正矩阵的形式为:
H k H k 1 k uk uk
T
Page 10
k vk vk
T
( II )
其中 k 0, uk = uk 1 , uk 2 , , ukn 0
x
k 1
x k d .
k k
Page 13
Step3: 计算
k 1 x
k 1
x
k 1
k
k 1 f ( x
) f ( x )
k T
H k 1 H k d
k 1
k 1 k 1 k 1 k 1
T k 1
)
H k k 1 k 1 H k
2
0 4 , 10 1
0 8
2 x1 f x , 8 x2
0
2 f x 0
2 2 0 0 f ( x ) , d f ( x ) 8 8
f
T
H1 H 0
1 1
T
T
1 1
H 0 1 1 H 0
T
1 H 0 1 Page 16
T
又
0.26154 1 x x 1.04 x
1
f x
0
0.52308 8.36923
1 0 0
Page 15
f
x 1.47692,
1
0.36923 ,
拟牛顿法的优缺点

拟牛顿法的优缺点拟牛顿法是一类求解非线性优化问题的数值优化方法,其通过近似计算目标函数的Hessian矩阵来提高收敛速度和稳定性。
在实际应用中,拟牛顿法具有以下优点和局限性。
1.优点:(1)收敛快速:与一阶方法相比,拟牛顿法利用了二阶信息,在迭代过程中能更准确地拟合目标函数的形状。
因此,它通常比梯度下降法等一阶方法收敛得更快。
这对于求解大规模问题和时间敏感的应用非常重要。
(2)不依赖于Hessian矩阵:拟牛顿法通过Hessian矩阵的逆或近似来指导优化过程。
但是,由于计算精度或计算复杂度的原因,很多时候无法直接获取或计算准确的Hessian矩阵。
拟牛顿法通过Broyden-Fletcher-Goldfarb-Shanno(BFGS)等方法来估计Hessian矩阵的逆矩阵,并且在实际应用中通常能得到很好的效果。
(3)适用性广泛:拟牛顿法在凸优化、非凸优化和约束优化等多种优化问题中都有广泛的应用。
而且,在处理非线性问题时,相对于一些特定的算法(如共轭梯度法)来说,拟牛顿法更具灵活性。
(4)稳定性较好:由于拟牛顿法综合考虑了目标函数的一、二阶信息,因此具有较好的稳定性。
即使在目标函数存在一定噪声或不光滑的情况下,拟牛顿法通常能找到一个较优解。
2.缺点:(1)计算开销较大:拟牛顿法的优势在于使用二阶信息来加快收敛速度。
然而,为了得到二阶信息,需要计算目标函数的梯度,以及近似的Hessian矩阵或其逆矩阵。
这些计算往往比一阶方法更加昂贵,特别是当问题规模很大时。
因此,在实际应用中,计算成本的考虑也是选择拟牛顿法的一个因素。
(2)内存占用较大:由于要存储梯度向量和Hessian矩阵(或其逆矩阵)的估计,拟牛顿法通常需要大量的内存空间来存储这些中间变量。
尤其是当问题规模很大时,内存限制可能成为使用拟牛顿法的一个障碍。
(3)全局收敛性问题:拟牛顿法是一种局部优化算法,其收敛到的极小值点可能只是局部最优解。
在一些情况下,特别是在目标函数存在多个局部最优解的情况下,拟牛顿法可能会陷入局部最优解,而无法收敛到全局最优解。
拟牛顿法算法步骤

拟牛顿法算法步骤拟牛顿法(quasi-Newton method)是一类用于非线性优化问题的迭代算法。
它通过使用一个矩阵来近似目标函数的Hessian矩阵,从而在每次迭代中更新解的位置。
相比于牛顿法,它避免了直接计算目标函数的二阶导数,因此更加高效且容易实现。
以下是拟牛顿法的一般步骤:Step 1: 初始化。
1.1选择初始解向量x0。
1.2 初始化一个矩阵B0作为目标函数Hessian矩阵的近似,通常选择单位矩阵或者其他对称正定矩阵。
Step 2: 迭代。
2.1 对于第k次迭代,计算目标函数在当前解xk处的梯度gk和Hessian矩阵的近似Bk。
2.2 求解线性方程式Bkδk=-gk,得到方向δk。
2.3选择一个步长αk,通过线确定使目标函数下降的最小步长。
2.4 更新解的位置:xk+1 = xk + αkδk。
Step 3: 终止判断。
3.1 如果满足终止条件,算法终止,输出当前解xk。
3.2 否则,返回Step 2进行下一次迭代。
下面是对拟牛顿法算法步骤的详细解释:Step 1: 初始化拟牛顿法的第一步是初始化。
选择一个初始解向量x0,并初始化一个矩阵B0作为目标函数Hessian矩阵的近似。
通常情况下,可以选择单位矩阵作为初始近似,也可以选择其他对称正定矩阵。
Step 2: 迭代在拟牛顿法中,通过迭代来逐步改进解的位置。
对于第k次迭代,我们需要计算目标函数在当前解xk处的梯度gk和Hessian矩阵的近似Bk。
2.1 计算梯度和Hessian矩阵的近似在每次迭代中,首先需要计算目标函数在当前解xk处的梯度gk。
这可以通过目标函数的偏导数来计算。
然后,根据Bk的近似,可以使用公式Bkdk = -gk来计算方向dk。
这个公式是拟牛顿法的核心,它实际上是在用近似的Hessian矩阵Bk乘以方向dk来得到一个近似的梯度-gk。
2.2线在拟牛顿法中,通过线确定在方向上使目标函数下降的最小步长。
具体而言,我们需要在方向上选择一个步长αk,使得目标函数满足一定的下降条件。
最优化算法(牛顿、拟牛顿、梯度下降)
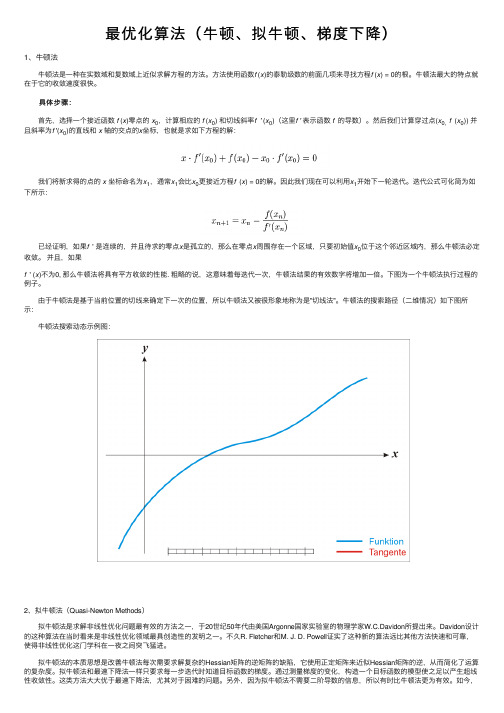
最优化算法(⽜顿、拟⽜顿、梯度下降)1、⽜顿法 ⽜顿法是⼀种在实数域和复数域上近似求解⽅程的⽅法。
⽅法使⽤函数f (x)的泰勒级数的前⾯⼏项来寻找⽅程f (x) = 0的根。
⽜顿法最⼤的特点就在于它的收敛速度很快。
具体步骤: ⾸先,选择⼀个接近函数f (x)零点的x0,计算相应的f (x0) 和切线斜率f ' (x0)(这⾥f ' 表⽰函数f 的导数)。
然后我们计算穿过点(x0, f (x0)) 并且斜率为f '(x0)的直线和x 轴的交点的x坐标,也就是求如下⽅程的解: 我们将新求得的点的x 坐标命名为x1,通常x1会⽐x0更接近⽅程f (x) = 0的解。
因此我们现在可以利⽤x1开始下⼀轮迭代。
迭代公式可化简为如下所⽰: 已经证明,如果f ' 是连续的,并且待求的零点x是孤⽴的,那么在零点x周围存在⼀个区域,只要初始值x0位于这个邻近区域内,那么⽜顿法必定收敛。
并且,如果f ' (x)不为0, 那么⽜顿法将具有平⽅收敛的性能. 粗略的说,这意味着每迭代⼀次,⽜顿法结果的有效数字将增加⼀倍。
下图为⼀个⽜顿法执⾏过程的例⼦。
由于⽜顿法是基于当前位置的切线来确定下⼀次的位置,所以⽜顿法⼜被很形象地称为是"切线法"。
⽜顿法的搜索路径(⼆维情况)如下图所⽰: ⽜顿法搜索动态⽰例图:2、拟⽜顿法(Quasi-Newton Methods) 拟⽜顿法是求解⾮线性优化问题最有效的⽅法之⼀,于20世纪50年代由美国Argonne国家实验室的物理学家W.C.Davidon所提出来。
Davidon设计的这种算法在当时看来是⾮线性优化领域最具创造性的发明之⼀。
不久R. Fletcher和M. J. D. Powell证实了这种新的算法远⽐其他⽅法快速和可靠,使得⾮线性优化这门学科在⼀夜之间突飞猛进。
拟⽜顿法的本质思想是改善⽜顿法每次需要求解复杂的Hessian矩阵的逆矩阵的缺陷,它使⽤正定矩阵来近似Hessian矩阵的逆,从⽽简化了运算的复杂度。
求解非线性方程组的牛顿法和拟牛顿法

求解非线性方程组的牛顿法和拟牛顿法解决非线性方程组是数学中的一个经典问题,其应用广泛,例如化学、物理、优化和金融等领域。
牛顿法和拟牛顿法是求解非线性方程组的常见方法之一,本文将详细介绍牛顿法和拟牛顿法的原理、优缺点以及实现步骤。
一、牛顿法牛顿法是一种高效的求解非线性方程组的方法,其基本思路是利用一阶泰勒展开式近似于原方程组,并以此构造一个更新方案,通过一步步迭代找到原方程组的解。
以二元非线性方程组为例,假设有方程组:f1(x1, x2) = 0f2(x1, x2) = 0根据泰勒展开式的一阶近似可得:f(x + Δx) ≈ f(x) + Jx Δx其中,Jx为函数f(x)在点x处的Jacobian矩阵,Δx是待求解的更新量,它满足:f(x + Δx) = 0将近似式带入上述方程组中,可得:Jx Δx = - f(x)由此可以推导出牛顿法的迭代式:x(k+1) = x(k) - [Jx(k)]⁻¹f(x(k))其中,k表示迭代次数,x(k)表示第k次迭代的解,[Jx(k)]⁻¹为Jx(k)的逆矩阵。
牛顿法的优点在于它的收敛速度很快,尤其是在初始值接近解时,收敛更加快速。
但是,牛顿法也有很大的局限性,一是它需要求解Jacobian矩阵,在高维情况下计算复杂度很高,二是它的收敛性依赖于初始值,有时候可能会陷入局部最优。
二、拟牛顿法为了克服牛顿法的局限,拟牛顿法被发明出来。
和牛顿法一样,拟牛顿法同样是基于泰勒展开式的近似思想,但是它避免了Jacobian矩阵的计算,从而提高了算法的计算效率。
拟牛顿法的核心是对于迭代过程中的Jacobian矩阵的近似。
常见的近似方法有Damping BFGS(DBFGS)算法、DFP算法和Broyden-Fletcher-Goldfarb-Shanno(BFGS)算法等。
其中,BFGS算法是拟牛顿法的代表,其迭代步骤如下:1. 初始化矩阵B0 = I2. 对于第k次迭代,求出pk = -Bk-1gk,并更新xk+13. 计算sk = xk+1 - xk,yk = gk+1 - gk4. 更新矩阵Bk+1 = Bk + ΔB,其中ΔB = ρskskT - BkykT - ykBkρ = 1/ (ykT sk)其中ΔB称为BFGS修正子,它近似于Jacobian矩阵的逆。
拟牛顿算法范文
拟牛顿算法范文拟牛顿算法(quasi-Newton algorithm),也被称为拟牛顿方法,是一类优化算法,用于求解无约束最优化问题。
它通过使用近似的海森矩阵(Hessian matrix)来迭代地逼近最优解,并可以在一定程度上替代传统的牛顿法。
牛顿法是一种基于二阶导数信息的优化方法,它对目标函数进行二次近似,并以此更新方向和步长。
然而,牛顿法需要计算和存储目标函数的海森矩阵,它的计算复杂度为O(n^2),其中n是目标函数的维度。
当目标函数的维度很高时,计算和存储海森矩阵将变得非常耗时和困难。
为了解决这个问题,拟牛顿算法采用了一种近似的方法来估计海森矩阵。
它基于牛顿法的思想,但使用更简单的Hessian矩阵估计技术。
拟牛顿方法可以通过迭代更新当前点的近似Hessian矩阵,从而逐渐接近最优解。
最著名的拟牛顿算法之一是Broyden-Fletcher-Goldfarb-Shanno (BFGS)算法,它是由四位数学家分别独立提出的。
BFGS算法使用拟牛顿方式更新近似的Hessian矩阵,以此来求解目标函数的最小值。
BFGS 算法在求解大型优化问题和非线性最小二乘问题时表现出色,因为它避免了显式计算和存储原始Hessian矩阵,并使用矩阵乘法来近似它。
另一个常用的拟牛顿方法是L-BFGS(Limited-memory BFGS)算法,它是BFGS算法的一种改进。
L-BFGS算法在迭代过程中,只需要存储有限数量的历史信息,从而降低了内存使用量,并且适用于大型问题。
L-BFGS 算法被广泛应用于机器学习领域的训练模型和优化问题中。
要使用拟牛顿算法求解无约束最优化问题,通常需要考虑以下几个关键步骤:1.选择初始点:需要根据具体问题选择一个合适的初始点作为起点。
2. 选择近似Hessian矩阵:需要选择一种拟牛顿方法,并确定如何估计和更新近似Hessian矩阵。
3. 计算方向和步长:使用近似Hessian矩阵来计算方向,并使用线或其他方法确定步长。
拟牛顿法公式

拟牛顿法公式拟牛顿法是一种求解非线性方程的迭代算法,它通过逼近问题的局部线性模型来逼近方程的解。
拟牛顿法公式是该算法的核心表达式,用于更新迭代解的数值。
下面将对拟牛顿法公式进行详细介绍。
拟牛顿法公式的一般形式为:x(k+1) = x(k) - [H(k)]^(-1) * g(k)其中,x(k)表示第k次迭代的解向量,x(k+1)表示第k+1次迭代的解向量,g(k)表示第k次迭代的梯度向量,H(k)表示第k次迭代的拟牛顿矩阵。
拟牛顿法的关键是如何选择拟牛顿矩阵H。
常用的拟牛顿法有DFP 方法和BFGS方法。
这两种方法都是基于满足拟牛顿条件的逆Hessian矩阵的递推公式。
DFP方法的递推公式为:H(k+1) = H(k) + (s(k) * s(k)') / (s(k)' * y(k)) - (H(k) * y(k) * y(k)' * H(k)) / (y(k)' * H(k) * y(k))BFGS方法的递推公式为:H(k+1) = H(k) + (1 + (y(k)' * H(k) * y(k)) / (y(k)' * s(k)))* (s(k) * s(k)') / (y(k)' * s(k)) - (H(k) * y(k) * s(k)' - s(k) * y(k)' * H(k)) / (y(k)' * s(k))其中,s(k) = x(k+1) - x(k)表示迭代解的变化量,y(k) = g(k+1) - g(k)表示梯度的变化量。
通过不断迭代,拟牛顿法可以逐步逼近非线性方程的解。
每次迭代,根据拟牛顿法公式更新解向量,直到达到收敛条件为止。
收敛条件可以是解向量的变化量小于某个预设阈值,或者目标函数的梯度小于某个预设阈值。
需要注意的是,拟牛顿法并不一定能够收敛到全局最优解,而是局部最优解。
因此,在实际应用中,我们需要结合问题的特点选择合适的初值和拟牛顿矩阵的初始估计,以提高算法的收敛性和求解精度。
拟牛顿法
•主页•专栏作家•量化基础理论•软件使用经验•量化软件•资源导航•资料下载•量化论坛搜索搜索用户登录用户名:*密码:*登录•创建新帐号•重设密码首页拟牛顿法及相关讨论星期三, 2009-06-17 00:24 —satchel1979使用导数的最优化算法中,拟牛顿法是目前为止最为行之有效的一种算法,具有收敛速度快、算法稳定性强、编写程序容易等优点。
在现今的大型计算程序中有着广泛的应用。
本文试图介绍拟牛顿法的基础理论和若干进展。
牛顿法(Newton Method)牛顿法的基本思想是在极小点附近通过对目标函数做二阶Taylor展开,进而找到的极小点的估计值[1]。
一维情况下,也即令函数为则其导数满足因此(1)将作为极小点的一个进一步的估计值。
重复上述过程,可以产生一系列的极小点估值集合。
一定条件下,这个极小点序列收敛于的极值点。
将上述讨论扩展到维空间,类似的,对于维函数有其中和分别是目标函数的的一阶和二阶导数,表现为维向量和矩阵,而后者又称为目标函数在处的Hesse矩阵。
设可逆,则可得与方程(1)类似的迭代公式:(2)这就是原始牛顿法的迭代公式。
原始牛顿法虽然具有二次终止性(即用于二次凸函数时,经有限次迭代必达极小点),但是要求初始点需要尽量靠近极小点,否则有可能不收敛。
因此人们又提出了阻尼牛顿法[1]。
这种方法在算法形式上等同于所有流行的优化方法,即确定搜索方向,再沿此方向进行一维搜索,找出该方向上的极小点,然后在该点处重新确定搜索方向,重复上述过程,直至函数梯度小于预设判据。
具体步骤列为算法1。
算法1:(1) 给定初始点,设定收敛判据,.(2) 计算和.(3) 若< ,则停止迭代,否则确定搜索方向.(4) 从出发,沿做一维搜索,令.(5) 设,转步骤(2).在一定程度上,阻尼牛顿法具有更强的稳定性。
拟牛顿法(Quasi-Newton Method)如同上一节指出,牛顿法虽然收敛速度快,但是计算过程中需要计算目标函数的二阶偏导数,难度较大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
拟牛顿法牛顿法的收敛速度虽然较快,但要求海森矩阵要可逆,要计算二阶导数和逆矩阵,就加大了就算机计算量。
为了克服牛顿法的缺点,同时保持较快收敛速度的优点,就产生了拟牛顿法。
拟牛顿法是牛顿法的直接推广,通过在试探点附近的二次逼近引进牛顿条件来确定线搜索方向,它主要有DFP 和BFGS 两种形式,拟牛顿法的一般步骤为:(1) 给定初始点(0)x ,初始对称正定矩阵0H ,(0)0()g g x =及精度0ε>; (2) 计算搜索方向()k k k p H g =-;(3) 作直线搜索(1)()()(,)k k k xF x p +=,计算(1)(1)11(),()k k k k f f x g g x ++++==,(1)()1,k k k k k k S x x y g g ++=-=-(4) 判断终止准则是否满足;(5) 令1k k k H H E +=+置1k k =+,转步骤(2);不同的拟牛顿法对应不同的k E ,主要介绍DFP 和BFGS 两种拟牛顿法。
1. DFP 法(1) 算法原理DFP 算法中的校正公式为:1k kk kT T k k k kk k T T kk k S S H y y H H H S y y H y +=+-为了保证k H 的正定性,在下面的算法中迭代一定次数后,重置初始点和迭代矩阵再进行迭代。
(2) 算法步骤1) 给定初始点(0)x ,初始矩阵0n H I =及精度0ε>; 2) 若()(0)f xε∇≤,停止,极小点为(0)x ;否则转步骤3);3) 取()(0)(0)0p H f x =-∇,且令0k =; 4) 用一维搜索法求k t ,使得()()()()0()min ()k k k k k k t f Xt p f X tp α≥+=+,令(1)()()k k k x x tp +=+,转步骤5);5) ()(1)k f xε+∇≤,停止,极小值点为(1)k x +;否则转步骤6);6) 若1k n +=,令(0)()n x x =,转步骤3);否则转步骤7);7) 令()()()()()()()()()()()()()()()()()()(1)()(1)()1(1)()(1)()(1)()(1)()(1)()(1)()Tk k k k k k Tk k k k Tk k k k k kTk k k k kx x x x H H xx f x f x H f xf x f x f x H f x f x H f x f x +++++++++--=+-∇-∇∇-∇∇-∇-∇-∇∇-∇,取()()(1)1k k k p H f x ++=-∇,置1k k =+,转步骤4)。
(3) 算法的MATLAB 程序调用格式:[,min ]min (,0,var,)x f DFP f x eps = 其中,f :目标函数 0x :初始点var :自变量向量 eps :精度x :目标函数取最小值时的自变量值 min f :目标函数的最小值DFP 的MATLAB 程序代码如下:function [x,minf]=minDFP(f,x0,var,eps) %目标函数:f; %初始点:x0;%自变量向量:var;%目标函数取最小值时的自变量值:x; %目标函数的最小值:minf; format long; if nargin==3 eps=1.0e-6; endx0=transpose(x0); n=length(var); syms l; H=eye(n,n);gradf=jacobian(f,var); v0=Funval(gradf,var,x0); p=-H*transpose(v0); k=0; while 1v=Funval(gradf,var,x0); tol=norm(v); if tol<=eps x=x0;break; endy=x0+l*p;yf=Funval(f,var,y); [a,b]=minJT(yf,0,0.1); xm=minHJ(yf,a,b); x1=x0+xm*p;vk=Funval(gradf,var,x1); tol=norm(vk); if tol<=eps x=x1; break; endif k+1==n x0=x1; continue; elsedx=x1-x0; dgf=vk-v;dgf=transpose(dgf); dxT=transpose(dx); dgfT=transpose(dgf); mdx=dx*dxT; mdgf=dgf*dgfT;fz=H*(dgf*(dgfT*H));H=H+mdx/(dxT*dgf)-inv(dgfT*(H*dgf))*fz; p=-H*transpose(vk); k=k+1; x0=x1; end endminf=Funval(f,var,x); format short;2. BFGS 法(1) 算法原理BFGS 算法中的校正公式为()()()()()()()()()()()1()()()()()()()()()()11T Tk k k k k k k T T k k k k T T k k k k k k Tk k S S y H y H H S y S y S y H H y S S y +⎡⎤⎢⎥=++⎢⎥⎣⎦⎡⎤-+⎢⎥⎣⎦为了保证k H 的正定性,在下面算法步骤中迭代一定次数后,重置初始点和迭代矩阵再进行迭代。
(2) 算法步骤1) 给定初始点(0)x ,初始矩阵0n H I =及精度0ε>; 2) 若()(0)f xε∇≤,停止,极小点为(0)x ;否则转步骤3);3) 取()(0)(0)0p H f x =-∇,且令0k =; 4) 用一维搜索法求k t ,使得()()()()0()min ()k k k k k k t f Xt p f X tp α≥+=+,令(1)()()k k k x x tp +=+,转步骤5);5) ()(1)k f xε+∇≤,停止,极小值点为(1)k x +;否则转步骤6);6) 若1k n +=,令(0)()n x x =,转步骤3);否则转步骤7); 7) 令()()()()()()()()()()()1()()()()()()()()()()11T Tk k k k k k k T T k k k k T T k k k k k k Tk k S S y H y H H S y S y S y H H y S S y +⎡⎤⎢⎥=++⎢⎥⎣⎦⎡⎤-+⎢⎥⎣⎦其中:()()()(1)()()(1)()k k k k k k S x x y f x f x ++=-=∇-∇,取()()(1)1k k k p H f x ++=-∇,置1k k =+,转步骤4)。
(3) 算法的MATLAB 程序调用格式:[,min ]min (,0,var,)x f BFGS f x eps = 其中,f :目标函数 0x :初始点var :自变量向量 eps :精度x :目标函数取最小值时的自变量值 min f :目标函数的最小值BFGS 的MATLAB 程序代码如下:function [x,minf]=minBFGS(f,x0,var,eps) %目标函数:f; %初始点:x0;%自变量向量:var;%目标函数取最小值时的自变量值:x;%目标函数的最小值:minf;format long;if nargin==3eps=1.0e-6;endx0=transpose(x0);n=length(var);syms l;H=eye(n,n);gradf=jacobian(f,var);v0=Funval(gradf,var,x0);p=-H*transpose(v0);k=0;while 1v=Funval(gradf,var,x0);tol=norm(v);if tol<=epsx=x0;break;endy=x0+l*p;yf=Funval(f,var,y);[a,b]=minJT(yf,0,0.1);xm=minHJ(yf,a,b);x1=x0+xm*p;vk=Funval(gradf,var,x1);tol=norm(vk);if tol<=epsx=x1;break;endif k+1==nx0=x1;continue;elsedx=x1-x0;dgf=vk-v;dgf=transpose(dgf);dxT=transpose(dx);dgfT=transpose(dgf);mdx=dx*dxT;mdgf=dgf*dgfT;H=H+(1+dgfT*(H*dgf)/(dxT*dgf))*mdx/(dxT*dgf)-(dx*dgfT*H+H*dgf*dxT)/(dxT*dgf);p=-H*transpose(vk); k=k+1;x0=x1;endendminf=Funval(f,var,x); format short;欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书,学习资料等等打造全网一站式需求。