fpv使用教程
无人机VR主视角飞行PPT课件
VR主视角飞行 参考任务2: 无人机穿越
驾驶无人机,主视 角穿过呼啦圈,体 验无人机竞技的难 度。
VR主视角飞行 参考任务3: 无人机搜索
在大地图上寻找指 定的地点,锻炼飞 行技能的同时更熟 悉地理。
VR主视角飞行 参考任务4: 无人机观测
利用无人机观察拍 摄户外高大的树木, 观察植物。
课堂总结
VR眼镜的简单原理
左右眼分屏
日常生活中,我们的两只眼睛位置不同会以不同的角度观看物体, 所以两眼看到的影像会有所不同。
小实验:闭上一只眼睛,用“套住”一 个目标,再换另一只眼睛看,目标有没 有“跑出去”?分别显示左右眼看到的影响,让观 赏者产生错觉,可看到具有深度、层次和立体感的影像。
VR主视角飞行
手机连接无人机,打开TELLO APP,点设置
VR主视角飞行
打开手柄和手机蓝牙,点“蓝牙手柄设置”连接
VR主视角飞行
点“VR”切换到双屏显示模式,将手机放入VR眼镜
VR主视角飞行
蓝牙手柄
向上 左转
向下
右转 向左
向前 向右
向后
VR主视角飞行
参考任务1: 无人机观光
练习无人机、手柄、VR眼镜的连接。熟悉主视 角飞行的操控,探索一下周围的环境,体会不同 的视角。
本节课我们了解了主视角飞行(FPV)和应 用,学习了VR眼镜的原理。
1.7 无人机连接VR眼镜 ——无人机主视角飞行
学习目标
1. 了解主视角飞行(FPV)和应用 2. 学习VR眼镜的原理 3. 掌握无人机连接VR眼镜及手柄操控 4. 练习无人机主视角飞行
什么是第一人称视角 (FPV) ?
• FPV是基于无人机摄像头回传和头戴显示器实现的.
什么是第一人称视角 (FPV) ?
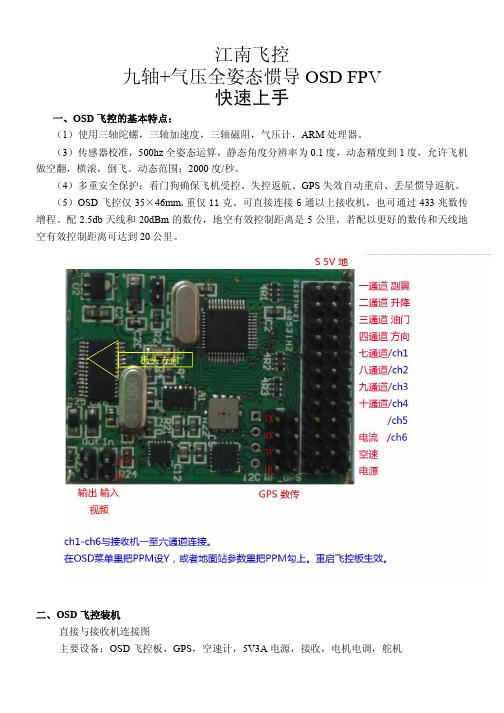
OSD FPV版使用指南
把新的参数保存后,再次起飞,飞到一定的高度后,把六通道打到高,进入定高飞行模式。 如果高度、速度能维持,说明参数设置 OK 了,就可把六通道打到中,五通道打到高,测试自动 返航了。如果有意外,或者是返航完成后,把五通道打到 低 ,退出自主模式,六通道保持 中 ,以 辅助模式降落。 七、电子指南针
通道接右副翼。 5.通道正反:把遥控器的一二四居中,三打到最低。把六通道打到中,切到辅助模式。
抬起左翼时,左副翼应上抬。否则改变参数中通道一的正反状态。 抬起尾部时,升降舵应上抬。否则改变参数中通道二的正反状态。 机尾顺时针摆动,尾舵应顺时针转动。否则改变参数中通道四的正反状态。 上面三步设置好飞机内部的控制逻辑后,再动遥控器的摇杆,设置遥控器的正反。除三通道外, 遥控器的一二四都应该是 NORMAL。 6.通讯:选择 GPS 和数传的通讯速率。保存,重启飞控板生效。
二、各参数的说明:
序号
名称
0,1,2,3 ,4,6
各通道增益值
5
联动系数
7
方向限定值
8
油门最大值
9 10 11 12 13
14,15
油门平飞值 电压校正系数 安全高度 加速度系数 接近距离 俯仰和倾斜限 定值
17,18 副翼和升降 D
19
偏航 P
20
偏航 D
21
空速校正系数
22
速度设定值
23
气压计修正系 数
36
调整气压计的读数与实际海拨值一致,取值范围为 -200…+200,单位为 m
0
与各飞行模式相关的参数:
FPV Freerider—Taranis设置指南
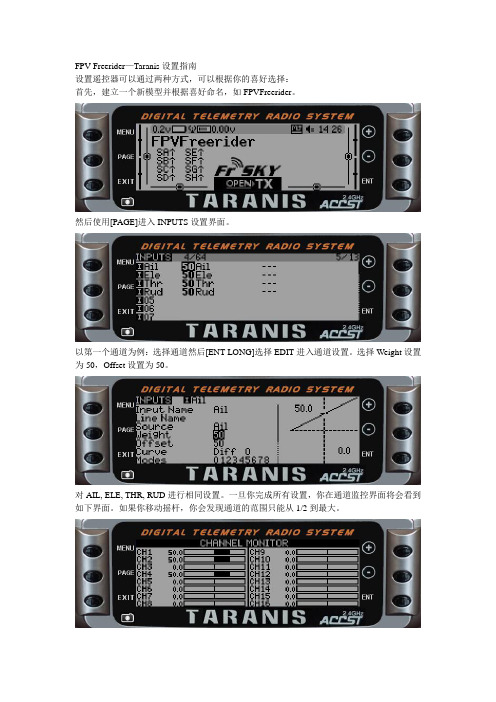
FPV Freerider—Taranis设置指南
设置遥控器可以通过两种方式,可以根据你的喜好选择:
首先,建立一个新模型并根据喜好命名,如FPVFreerider。
然后使用[PAGE]进入INPUTS设置界面。
以第一个通道为例:选择通道然后[ENT LONG]选择EDIT进入通道设置。
选择Weight设置为50,Offset设置为50。
对AIL, ELE, THR, RUD进行相同设置。
一旦你完成所有设置,你在通道监控界面将会看到如下界面。
如果你移动摇杆,你会发现通道的范围只能从1/2到最大。
另外一个方法是使用曲线来实现相同的事情。
在新建模型后使用[PAGE]来到CURVES设置界面。
选择一个曲线CV1然后[ENT LONG]进入编辑模式。
按下列图片设置0, 25, 50, 75, 100,个点的值。
然后进入INPUTS界面。
[ENT LONG]进入编辑模式,并设置曲线为自定义的CV1,如下图。
所有通道使用相同的曲线设置。
完成后退出设置,在通道监视器界面查看设置效果。
现在你只需要在FPVFreerider主菜单校准遥控器设置,去实践吧。
Flysight Falcon FPV 头盔说明书
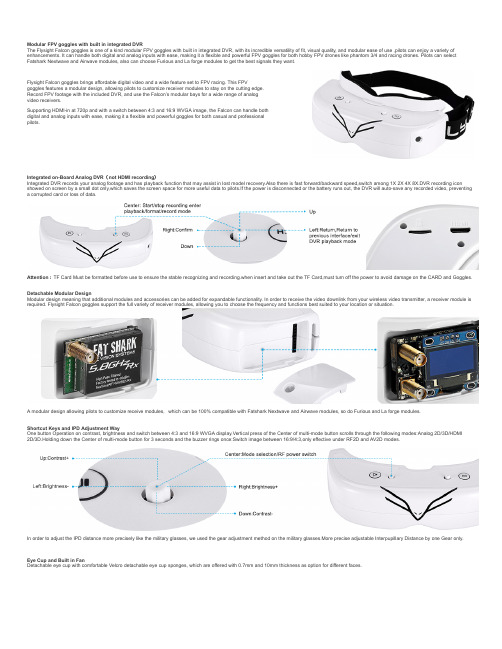
Modular FPV goggles with built in integrated DVRThe Flysight Falcon goggles is one of a kind modular FPV goggles with built in integrated DVR, with its incredible versatility of fit, visual quality, and modular ease of use ,pilots can enjoy a variety of enhancements. It can handle both digital and analog inputs with ease, making it a flexible and powerful FPV goggles for both hobby FPV drones like phantom 3/4 and racing drones. Pilots can select Fatshark Nextwave and Airwave modules, also can choose Furious and La forge modules to get the best signals they want.Flysight Falcon goggles brings affordable digital video and a wide feature set to FPV racing. This FPVgoggles features a modular design, allowing pilots to customize receiver modules to stay on the cutting edge.Record FPV footage with the included DVR, and use the Falcon’s modular bays for a wide range of analogvideo receivers.Supporting HDMI-in at 720p and with a switch between 4:3 and 16:9 WVGA image, the Falcon can handle bothdigital and analog inputs with ease, making it a flexible and powerful goggles for both casual and professionalpilots.Integrated on-Board Analog DVR(not HDMI recording)Integrated DVR records your analog footage and has playback function that may assist in lost model recovery.Also there is fast forward/backward speed,switch among 1X 2X 4X 8X.DVR recording icon showed on screen by a small dot only,which saves the screen space for more useful data to pilots.If the power is disconnected or the battery runs out, the DVR will auto-save any recorded video, preventing a corrupted card or loss of data.Attention:TF Card Must be formatted before use to ensure the stable recognizing and recording.when insert and take out the TF Card,must turn off the power to avoid damage on the CARD and Goggles. Detachable Modular DesignModular design meaning that additional modules and accessories can be added for expandable functionality. In order to receive the video downlink from your wireless video transmitter, a receiver module is required. Flysight Falcon goggles support the full variety of receiver modules, allowing you to choose the frequency and functions best suited to your location or situation.A modular design allowing pilots to customize receive modules,which can be 100% compatible with Fatshark Nextwave and Airwave modules, so do Furious and La forge modules.Shortcut Keys and IPD Adjustment WayOne button Operation on contrast, brightness and switch between 4:3 and 16:9 WVGA display.Vertical press of the Center of multi-mode button scrolls through the following modes:Analog 2D/3D/HDMI2D/3D.Holding down the Center of multi-mode button for 3 seconds and the buzzer rings once:Switch image between 16:9/4:3,only effective under RF2D and AV2D modes.In order to adjust the IPD distance more precisely like the military glasses, we used the gear adjustment method on the military glasses.More precise adjustable Interpupillary Distance by one Gear only. Eye Cup and Built in FanDetachable eye cup with comfortable Velcro detachable eye cup sponges, which are offered with 0.7mm and 10mm thickness as option for different faces.Built in fan keep good cooling for the goggles and is easily operated by power on/off button. No more fogging up, even if for the Fatshark size multiple diopter lens such as -2,-4,-6.Button Operation InstructionWhat’s Included?1x Modular FPV goggles with integrated DVR1x Detachable face plate2x Velcro eye cup sponges(0.7mm/10mm)1x Adapter cable(DC F to XT60M,10cm)1x Adapter cable(DC F to XT60M,1.5m)1x Charging cable(DC M to XT60M F,10cm)1x 18650 battery case1x AV cable1x Head strap1x Cleaning cloth1x User manualEverything you need is included in the goggles,goggles bring affordable digital video and a widefeature set to FPV racing.Pilots can set up the goggles basing on their different applications withthe above useful accessoriesMore Instruction on 18650 Battery CasePortable battery case with 2 pieces of 18650 batteries to work and show battery status by the LED lights,it can offer 150 minute working time for the Falcon goggles.。
为帮助新手,特作了一份FPV入门
为帮助新手,特作了一份FPV入门为帮助新手,特作了一份FPV入门固定翼FPV入门航模固定翼FPV一般飞得比较远,因此多数情况下会超出视距超视距的意思就是你肉眼看不到飞机了一般情况下,2米以内翼展的飞机,飞出去400-500米已经看不到视力不佳者,飞机飞出去300米距离已经看不到基于是入门,再解释一下什么叫翼展翼展,简单的讲就是翅膀的长度,载机的大小,一般讲翼展而不是讲从机头到机尾的长度1:飞控篇那么既然飞到看不见了,你就无法从姿态上来操控飞机了。
这时需要飞控来帮你稳住飞机飞控的全称,可以理解为:飞行控制器它的作用是:当你不动遥控器时,它帮你让飞机平稳的飞行不会低头冲下来炸机,也不会抬头乱爬高,也不会左右翻滚。
如果你选用定高定向模式时,它还会让飞机保持高度,一直飞下去直到人为干预改变。
当你分不清东南西北,找不到回家的路时,它还可以帮你返航飞回你头顶,然后让你接手操控降落。
当你的遥控器失灵,即失控时,它也可以帮你把飞机飞回头顶,防止炸鸡、丢鸡;注:鸡=机。
当然这些都是要进行设置的。
市场上消费级的飞控有:果子(MFD)飞控,Arkbird飞控(A控),飞宇飞控,切糕飞控,APM飞控,PIX飞控,H飞控,非凡飞控等。
不要问我哪个好,不要叫我推荐,合适自己的就是最好的。
另:没有列出的飞控品牌请不要骂我。
2:图传篇飞机既然飞到看不见了,那么我们就给飞机装上一双眼睛---摄像头让我们通过摄像头来了解飞机前方甚至四周的环境那么摄像头拍摄到的实时图像,需要通过无线电发送回地面,因为我们不可能连着一条视频线在飞机上,一路飞出去。
把图像传送回来的设备叫图传,全称应该叫:无线图像传输器。
图传的工作原理如下图:来说一下什么叫OSD,OSD就是一些飞行数据,比如说距离多远高度多少,速度多少、电池还有多少电,飞机的实时姿态,飞得平不平,是抬头飞还是低头飞,飞机往哪个方向飞等等、再等等。
OSD一般为飞控产生,也有独立的OSD模块,飞控将OSD信息水印在摄像头的图像上,然后让图传发送回地面,以便飞手掌握飞机信息,作出相应操控。
FuriousFPV Smart Power Case 用户手册说明书

SMART POWER CASEUSER MANUAL VERSION 1.0CONTENTSFeatures (2)Product Layout (2)How To Use Smart Power Case? (3)Battery types (3)How to charge Smart Power Case via Balance jack? (4)How to turn ON/OFF Smart Power Case? (4)Usage (5)Status Screen (5)Load Screen (6)Settings Menu (6)LOW VOL – Low Voltage Warning (6)HV ENA – Battery High Voltage Selection (6)Imax (Current Max) – Overload Warning (6)ALARM – The Time Warning (7)CALL SIGN – Pilot Name Display (7)CUT OFF – Critical Voltage Warning (7)UNITS – Temperature Display (7)Troubleshooting With The Warning (8)Support (9)Features-Smart ON/OFF power button-OLED Display with call sign, time warning, current, voltage, used capacity and temperature-Configurable low-voltage/overload warning buzzer-Short Circuit Protection-Auto Power OFF to protect batteries from under-discharge damage-Rapidly Attach/Detach System with magnetic system-Ability to directly charge the batteries inside the case via balance Jack (including an adapter for XT60 type chargers) or charge in separate charger-Easily & Rapidly swap batteries-Designed for 18650 rechargeable batteries-Fits Perfectly on FatShark battery strap-Temperature display-Designed to work with all types of gogglesProduct LayoutHow To Use Smart Power Case?Battery types-Compatible with all 18650 lithium-ion batteries.-Recommended Battery: https://goo.gl/QEwDN3How to charge Smart Power Case via Balance jack?-Recommended charging current: 1.0A – 1.5A-Directly charge the batteries inside the case via balance Jack-Directly charge the batteries inside the case via balance Jack and an adapter cable. Video Tutorial: https://goo.gl/p4WScuHow to turn ON/OFF Smart Power Case?-ON: Press then press + hold the button until Load Bar on the OLED is full OFF: At the Load Screen, press then press + hold the button until Load Bar on the OLED is empty. Also, while in setting or on “Status Screen” mode if no button is pressed , it will auto turn off.UsageThe Smart Power Case’s diagram :*Note: When you are at “Settings Menu” and want to go to Load Screen . Please select Exit to come back to Status Screen . Then, press + hold button to go to Load Screen. Status ScreenShow Voltage remaining and the running texts to guide into the Settings mode.Voltage RemainingThe running texts to guide into Settings modeLoad ScreenShow Voltage Remaining, Current Draw, Used Time, Call Sign, Temperature and Used Capacity. Also, show information when having a warning. *Note: Select this mode to turn on your deviceSettings Menu*Note: When you turn on the Smart Power Case anddon’t plug it into your device.After 2 minutes, the buzzer will give a warning and then shut down. LOW VOL –Low Voltage Warning-Warning by buzzer and OLED displays“LOW VOL!”when voltage remaining is lower than the configured low voltage level.- The options are as follow: from 6.0V to 7.2V (Step Size: 0.1V) and NONEHV ENA – Battery High Voltage Selection- Select the highest voltage to display voltage level at Load Screen. - The options are as follow: EN-8.7V/ DIS-8.4V.Imax (Current Max) – Overload Warning- Warning by buzzer and OLED displays “OVER LOAD!” when current draw is higher than the configured current level and then auto shut down module. - The options are as follow: from 0.6A to 2.0A (Step Size: 0.1A)TemperatureUsed CapacityCall SignVoltage Remaining Current DrawUsed TimeALARM – The Time Warning-Plug it into your device, set a time for the alarm and the buzzer will beep a few times when time comes. Then, auto shut down-The options are as follow: None/ 30min/ 60min/ 90min/ 120min.CALL SIGN – Pilot Name Display-Configure call sign/pilot name or text to be displayed on your Smart Power Case. You may utilize up to 10 alphanumeric characters and symbols.-To change Call Sign: Click button to change characters and press button to move through characters.CUT OFF – Critical Voltage Warning-Warning by buzzer and OLED displays “VOL TOO LOW!”when voltage remaining is lower than the configured voltage (if it passes this level, it may harm your battery lifespan).-The options are as follow: from 5.0V to 6.0V (Step Size: 0.1V) and NONEUNITS – Temperature Display-Show temperature (℃/℉) on your moduleTroubleshooting With The WarningCase 1: Short Circuit warning when devices connected to Smart Power Case have issues with electric short when getting wet or short circuit happens when screw drivers accidentally touch the power leads, the Smart Power Case will automatically turns off the power to prevent battery damage and also prevents damages to other connected devices.Case 2: Overload warning when current draw above the programmable threshold, the Smart Power Case utilizes an audible Overload warning when current draw above the designated threshold. Able to be programmed with Imax settings that range from 0.6A to 2.0A.Case 3:Low Voltage warning or Critical Voltage warning when voltage drops below the programmable threshold, the Smart Power Case utilizes an audible low voltage warning when power drops below the designated threshold. Able to be programmed with voltage settings that range from 6.0V to 7.2V with Low Voltage and from 5.0V to 6.0V with Critical Voltage.Case 4: Power drops below the designated threshold when you press button to turn on the Smart Power Case. OLED displays “LOW VOL! – CANNOT OPEN LOAD!”or “CRITICAL LOW VOL! – PLEASE RECHARGE ME!” then you cannot go to Load Screen to turn on your device. Please recharge battery to use.Case 5: Try to t urn on Smart Power Case but it doesn’t power o n. Please check battery polarity or make sure that battery cells are workingSupportThe reseller you purchased your product from handles the first line of support. If you encounter any problems with your Furious FPV products, please contact them first on issues involving equipment from other brands and general support for Furious FPV products.Please contact us if you need further assistance:Tech support: *******************Sales support: ********************Thanks for using our product。
FPVI编程手册

1.FPVI101.1.FPVI10()FPVI10(BYTE byChannel)ParameterschannelFPVI10逻辑通道号Remarks定义一路FPVI10,并指定使用的逻辑通道号。
逻辑通道号用于软件编程,不同工位下的相同逻辑通道同步并行工作。
Example/*假设系统配置为4块FPVI10(8个物理通道),四工位并行工作,每个工位有两个通道,定义可使用的FPVI10 */FPVI10 fpvi0(0); //使用逻辑通道0FPVI10 fpvi1(1) ; //使用逻辑通道11.2.Set ()int Set(VIMode fvimode, double setValue, FPVI10_VRNG vRng, FPVI10_IRNG iRng, OUT_RELAY enableRelay = RELAY_HOLD,int transTime = 0); ParametersfvimodeFPVI10工作模式,有两种模式。
FV:选择恒压模式FI:选择恒流模式setValue设置恒压或者恒流值。
选择恒压模式时,该参数为恒压值,单位为V;选择恒流模式时,该参数为恒流值,单位为A。
FPVI10_VRNG vRngFPVI10电压量程。
FPVI10_100mV:100mV量程档FPVI10_1V:1V量程档FPVI10_2V:2V量程档FPVI10_5V:5V量程档FPVI10_10V:10V量程档FPVI10_20V:20V量程档FPVI10_50V:50V量程档FOVI_IRNG iRngFPVI10测流量程。
FPVI10_100UA:100uA量程档FPVI10_1MA:1MA量程档FPVI10_10MA:10MA量程档FPVI10_100MA:100MA量程档FPVI10_1A:1A量程档FPVI10_10A:10A量程档enableRelay设置输出继电器如何动作,分为三种情况:RELAY_ON:闭合输出继电器;RELAY_OFF:断开输出继电器;RELAY_HOLD:输出继电器状态保持,即保持之前输出继电器的状态,如果之前为RELAY_ON,则保持闭合状态;如果之前为RELAY_OFF,则保持断开状态。
fpv形式验证 用法

fpv形式验证用法
FPV(Formally Verified)形式验证是一种用于验证数字电路或软件设计是否符合其规格或需求的验证方法。
在FPV中,设计被表示为数学模型,然后使用形式验证工具进行验证,以确定模型是否满足其规格。
FPV的使用方法通常包括以下步骤:
编写RTL(Register Transfer Level)代码或高级描述语言的代码来表示设计。
使用形式验证工具对设计进行建模,将其转换为可验证的数学模型。
定义规格或需求,以描述设计应该满足的条件。
使用形式验证工具对规格进行建模,将其转换为可验证的数学模型。
使用形式验证工具对设计模型和规格模型进行比较,以检查设计是否符合规格。
根据验证结果,如果设计符合规格,则可以得出结论说该设计是正确的;如果设计不符合规格,则可以找到可能的问题并进行修复。
FPV相对于传统的仿真验证方法,具有更高的可靠性和精确度,因为它使用数学证明来验证设计的正确性。
然而,FPV也有一些挑战和限制,例如需要精确建模和定义规格,以及可能需要
进行大量的计算和时间来得出验证结果。
因此,在使用FPV时需要仔细考虑其适用性和可行性。
FPV摄像头说明书

使用说明书Field of View(FOV)Lens Thread Size Video Resolution Video File Format Image Resolution TV Mode InterfaceMax Micro SD Card Supported WiFi Module Dimensions Power Input Working Current Net WeightFPV FOV 4:3@140°, 16:9@170°/HD Recording 170°M12*0.51080@60fps/1080@50fps /1080@30fps/720@60fps MOV 2 MegapixelsNTSC (720*480)/PAL (720*576) Switchable Micro USB / UART64G(need Class 6 or above,recommend Class 10/UHS-I/UHS-II/UHS-III)Support (Removable)PCB 38*38mm/Lens Module 19*19mm DC 5-15V / DC 5V(USB)650mA @5V / 270mA @12V 19g注意:默认开机自动录像,录像状态下V1.0系列版本固件,短按WIFI/模式切换 键,为暂停/开始录像。
V1.1及以后版本固件,录像状态下短按WIFI/模 式切换键为停止录像启动WIFI;待机状态下,WIFI/模式切换键 功能不变。
·指示图A面LED 1:蓝色 WiFi状态灯LED 2:绿色 拍照状态灯LED 3:蓝色 录像状态灯LED 4:橙色 OSD设置状态灯LED 5:红色 电源状态灯(通电后常亮)TX RX GNDVCC+ (DC 5-15V)GND VideoLED 1LED 2LED 3LED 4LED 5麦克风蜂鸣器B面Micro-USBWiFi/模式切换键电源/快门键WiFi模块连接器Sensor连接器·5.8G 图传连接示意图5-17V GND VideoPower in GNDTransmitterPDB·PWM连接示意图·飞控设置准备工作· 固件:CleanFlight(≥2.1.0) or BetaFlight Firmware (coming soon)· 飞控上任意一个可用的uart的接口例如RunCam Split连接到飞控上的UART3接口:将飞控连接电脑,打开飞控调参软件(根据飞控固件的类型,选择对应的调参软件CleanFlight Configurator或者BetaFlight Configurator),在UART3这一行里的Peripherals列里,选择RunCam Device,然后点击Save And Reboot。
2024版年度FPV航模头追制作教程
2024/2/2
03
头追功能设置与优化
11
设置头追跟随模式
选择合适的头追设备
根据航模类型和需求,选择兼容 的头追设备,如摄像头、图像传
输设备等。
2024/2/2
安装头追设备
按照设备说明书,将头追设备正 确安装在航模上,确保设备稳固 且视线不受阻挡。
连接头追设备
将头追设备与航模的控制系统连 接,确保数据传输畅通。
提高航模稳定性
优化航模的飞行稳定性,可以减少头追设备的误判和抖动。 调整航模的重心、增加阻尼或采用更稳定的飞行控制算法等 方法可以提高稳定性。
2024/2/2
练习和技巧
通过练习和掌握一些飞行技巧,可以更好地利用头追功能提 高飞行体验。例如,学会如何平稳地控制航模、合理利用头 追视角进行拍摄等。
14
2024/2/2
设置头追模式
在航模控制系统中,找到头追设 置选项,选择合适的头追跟随模 式,如头部跟随、视角跟随等。
12
调整头追灵敏度及响应速度
2024/2/2
调整头追灵敏度 根据飞行环境和个人喜好,调整头追设备的灵敏度。较高 的灵敏度可以提高头追的响应速度,但也可能增加误判的 风险。
调整响应速度 在航模控制系统中,找到头追响应速度设置选项,根据实 际需求进行调整。较快的响应速度可以使头追更加迅速地 跟随目标,但也可能导致不稳定或抖动。
04
头追与飞行控制系统集成
15
了解飞行控制系统基本原理
飞行控制系统(Flight Control System,简称飞控)是航模的核心部分, 负责接收遥控器信号并根据预设算法控制航模的姿态和飞行轨迹。
飞控系统通过内置的传感器(如加速度计、陀螺仪、GPS等)感知航模 的状态,并通过控制电机等执行机构实现航模的稳定飞行和精确控制。
鹰眼说明书
连接电脑:
支持静置2min后则自动关闭TFT屏,进入省电模式。 省电模 式 下,视频正常录制
连接电视:
用TV线连接摄录机和电视,将所拍文件从摄录机转移到电K EYE鹰眼FPV高清录像机 说明书
FPV&航拍专用
前言:
感谢您购买本机,在使用前,请仔细阅读说明书,并妥善保管以备日后之需。
注意事项:
*请不要试图拆开本产品。 *避免在高温环境中使用,避免阳光直射。 *请将录像机放置于干燥、通风的地方,不能将录像机放在高温、潮湿的环境中。 *请不要用手触摸镜头。 *请不要将金属物或其它异物进入录像机的TF卡槽。 * USB供电范围:4.5V-5.5V; 请不要使用外部不稳定的降压/升压模块对鹰眼进行供 电,否则容易造成不可修复之损坏。 *不按使用说明书进行操作机而导致伤害或机器的损坏,均由用户自己负责。
图片,再次按下拍照/录影键,停止录像,所拍摄的片段会以MOV格式自动保存到TF卡 中。
操作指南:
这款摄录机有3种模式,可通过3档模式转换键进行切换。 拍照模式 按下电源开关开机后,将模式键推到最上瑞进入拍照模式,通过LCD屏取景,通过下 图中的功能按键编辑所要拍照的照片,按下拍照/录影键,照片会以JPEG格式自动保 存到TF卡中。
照片尺寸 JPEG 显示屏 变焦 防抖动 以上所有模式中出现的图标,绿色代表可触屏点击选择。 扬声器 文件格式 视频格式 1、可移动硬盘功能:用USB线将摄录机与电脑连接,此时机器会自动开机,选择 “Mass Storage”进入U盘模式,同时蓝色LED灯点亮,摄录机进入充电状态。 “我的电脑”中会出现可移动硬盘,之前拍摄的图片/摄影片段在路径:”可移动 硬盘”:\DCMI\110MEDIA中,通过电脑操作可将这文件移除摄录机的TF卡。 2、PC CAM功能:用USB线将摄录机与电脑连接,此时机器会自动开机,选择“PC Camera”进入摄像机模式,此时可当视频摄像头使用。 电池 连接端口 工作温度 关屏
GEPRC Cinebot30 商业用FPV机器人说明书

User ManualCatalogUser Manual (1)Overview (3)Specifications: (4)Features: (5)Warranty Policy: (6)PS: (6)DJI Digital FPV System: (7)Bind FrSky R-XSR: (8)Bind TBS NanoRX: (9)Bind ELRS: (10)Install Betaflight: (11)ARM(DJI Transmitter): (12)OpenTX Transmitter (13)IRC Tramp: (15)Install Silicone Pad,Landing pad: (17)Install Propellers: (18)Quick disassembly scheme (19)Pre-flight Check: (20)Includes: (21)Contact Details: (21)OverviewTaking your drone photography to the next level,the new series Cinebot30,take you to the real world,shooting extreme footage.Cinebot30is a new generation of Cinematic FPV drone developed by GEPRC team. The high-strength7075aircraft-grade aluminum alloy bracket for FPV camera escort, the combination of classic engineering and aesthetics.The newly polished gimbal damping module can easily fix high-frequency vibration and jello issues.It can be mounted with GEPRC Naked GoPro Hero8and GoPro Black Bones,Insta360GO2 and other cameras.The image is stable and clear,and it’s easy to film.Adopts high-strength one-piece injection-molded propeller guard and high-toughness and impact-resistant PC material for injection molding.A ring-shaped Cob light strip is embedded in the propeller guard,and the light effect is carefully tuned.High-strength grain-cut carbon fiber sheet,the overall strength of the fuselage is upgraded again! Cinebot30will be equipped with a powerful1804motor with optimized motor magnetic circuit and surging torque,which can easily cope with ultra-low altitude shooting.With HQ prop T76mm*3propeller,it gets the lowest noise effect in its ingGEP-F722-45A AIO v2flight controller,higher performance redundancy,and easy handling of unexpected situations.Finely polished frame design,only6screws need to be removed to separate the aircraft top plate and protection frame.Easy to cope with the urgent need to replace the accessories,at any time to restore the state. Tuned by GEPRC professionals,the Cinebot30is a Cinematic FPV that performs both indoor and outdoor flights equally well.The Cinebot30explores endless possibilities for your drone shots!Specifications:Model:Cinebot30HD QuadcopterBrand:GEPRCFrame:GEP-CT30Wheelbase:127mmTop plate thickness:2mmMain plate thickness:3mmBase plate thickness:1.5mmFC:GEP-F722-45A AIO V2MCU:STM32F722IMU:ICM-42688-PVTX:Vista Nebula Pro/Runcam Link/Walksnail Avatar/GEPRC RAD1W/DJI O3air unit Propeller:Hq prop T76mmAntenna:5.8GBattery Interface:XT60H-MMotor:SPEEDX21804-2450KV(6S Version)/SPEEDX21804-3450KV(4SVersion)Weight:222g(vista HD pnp)/Nebula Pro version222.5g/Avatar version221g/Analog version209.2g/Link Wasp version222.5g(excluding the battery,the above are TBS RXnano version)Receiver:PNP,Frsky R-XSR,TBS Nano915M RX,ELRS2.4GRecommended Battery:LiPo4S1100mAh-1300mAh(4S Version)/LiPo6S850mAh-1100mAh(6S Version)Features:1.Design that combines engineering and aesthetics.2.Quick-disassembly design,only need to remove6screws to upgrade or replace parts.3.Selected high-toughness and impact-resistant PC material for injection molding.4.Aviation7075aluminum alloy camera mounting bracket and fuselage aluminum column.5.Propeller guard embedded ring Cob light strip,carefully tuned light effect.Color brightness in the day and night can be clearly displayed.6.The newly developed gimbal shock absorption structure can disintegrate high frequency jitter and jello effect.Easily carry a variety of action cameras.7.Powerful1804motor,surging torque to deal with ultra-low altitude flight at will.8.With the new GEP-F722-45A AIO V2,stable performance,more secure flight9.Four kinds of FPV system with the program,choose to belong to your first-person view10.Tuned by GEPRC professionals,delicate and silky flying feelWarranty Policy:1.If Quadcopter is damaged or unknow issue,please contact GEPRC and send it back.We'll do our best to get this taken care of quickly for you.2.Any impact damage,product liquid damage,high temperature burn or other artificial damage is not covered by warranty.PS:1.All components has been strictly inspected and tested before shipping.2.If you have any problems,please cooperate with our engineers to figure out solutions. (E-mail:*****************.)DJI Digital FPV System:1.Turn the power of the FPV Goggles,DJI FPV Transmitter,andQuadcopter.Press the FPV Goggles bind button twice,and it will beep to indicate the binding state.2.Press the VISTA bind button,the indicator light turn red ,indicating that it is binding.Then the indicator light turns yellow,means the binding is successful,and the FPV Goggles will display the received picture.3.Press the C1custom button ,record button and right scroll wheel button of the remote controller,at the same time.The indicator light turns blue,and the remote controller sends a beep indicating that it is binding.4.Press the VISTA bind button,the indicator light turn red ,indicating that it is binding.Then the indicator light turns yellow,means the binding is successful.And the remote controller indicator light turnsGreen.BindingBindingSuccessfulBind Record Button C1CustomRight Scroll Wheel ButtonBinding Bind ButtonBindButtonBind FrSky R-XSR:1.For Taranis X9D/X9D Plus/X9E and Taranis QX7,turn on the transmitter,go to the MENU –MODEL SETUP –PAGE 2,choose Internal RF,and select BIND.2.Turn on the receiver while holding the bind button on the receiver,release the button and the bule,red,yellow LED on .3.When the red light flashes,it indicates that the binding is successful.Turn off the receiver,and then turn on the receiver.The blue light and yellow light of receiver are on,indicating that the link isnormal.123Binding ButtonBindingBinding SuccessfulBind TBS NanoRX:1.For Taranis X9D/X9D Plus/X9E and Taranis QX7,turn on the transmitter,go to the TOOLS –CROSSFIRE SETUP –XF Micro TX ,and select Bind.2.Turn on the receiver while holding the bind button on the receiver,release the button and the green LED on flash .and then holding the button for 8second ,and release.And the green light is off and the red light is flashing,‘update micro RX ?’will appear on the transmitter screen,and select ‘ENTER’.3.Wait for the update to complete,the binding is successful,and the receiver green light ison.123456Bind Button BindingBinding SuccessfulBind ELRS:GEPRC’s ELRS868MHz,ELRS915MHz and ELRS2.4G receivers have the same operation method for frequency alignment.1.When the receiver is powered on and off three times continuously(1second interval),the blue light of the receiver indicator will double flash continuously,indicating that the receiver has entered the frequency pairing status.2.For X9D/X9D Plus/X9E and Taranis QX7remote control,turn on the power of the remote control,press and hold the MENU key to enter TOOLS-ELRS and select Bind to enter the frequency pairing status.3.Wait for the blue light of the receiver indicator to change from continuous double flash to constant light,that is,the frequency pairing is successful.Turn off the receiver power,then turn on the receiver power,the blue light is always on,which means the receiver and remote control are connected normally.①②Bind ButtonBindingBinding SuccessfulInstall Betaflight:Although your Quadcopter comes from the factory nearly completely ready to fly,you still need to install betaflight to facilitate your subsequent use of betaflight for debugging. Installation package download address:https:///betaflight/betaflight-configurator/releasesEnter the web page,pull to the bottom,and select the appropriate installation package to download.EXE suffix is Windows system,DMG suffix is MacOS system,RPM/DEB suffix is Linux system,APK suffix is Android system.Install Drivers:If you are on windows,you must install the driver manually.MacOS and Linux do not.CP210x Drivers:https:///products/development-tools/software/usb-to-uart-bridge-vcp-dri versSTM USB VCP Drivers:/en/development-tools/stsw-stm32102.htmlZadig:http://zadig.akeo.ie/ARM(DJI Transmitter):With DJI FPV Transmitter,the toggle switch is set at the factory.Thecorresponding functions of each switch are as follows:SA AUX1(ARM)SB AUX2(MODES)SC AUX3(BEEPER)SD AUX4(Vacancy)DJI toggle switches are all three sections.If you move the Yellow cursor ofthe corresponding aux channel of the switch,the corresponding functionwill be turned on when you move to the set range.OpenTX TransmitterThe transmitter of openTX system needs to check the AUX channel.For Taranis X9D/X9D Plus/X9E and Taranis Q X7,turn on the transmitter,go to the MENU–MIXS and view the current AUX channel settings.CH1-CH4corresponds to four channels of rocker CH5(SF)γAUX1(ARM)CH6(SG)γAUX2(MODES)CH7(SA)γAUX3(BEEPER)CH8(SB)γAUX4(Light strip switch)·FrSky X9D transmitter SF toggle switch are two sections.If you move the Yellow cursor of the corresponding aux channel of the switch,the corresponding function will be turned on when you move to the set range.Use the transmitter wheel to move the cursor to select the AUX channel,and then press and hold the wheel key to edit the channel.You can name the aux channel,or set the toggle switches you want,and exit and save it.IRC Tramp:1.Turn on the transmitter,THR middle,YAW left,PITCH up,enter the OSD menu.2.The PITCH moves the cursor up and down,and the ELE right to enter the next item. Now,save and exit.Frequency table:Install Silicone Pad,Landing pad:Install Propellers:CINEBOT30Although the propeller of cinebot30are installed in the factory,the direction of the propeller should be checked before taking off.Although the blades of the CINEBOT30have been installed in the factory,it is necessary to check the direction,positive and negative of the blades before takeoff.Quick disassembly schemeIt is only necessary to remove6screws of the arm plate to open theinternal space for easy maintenance and replacement.Pre-flight Check:In many cases,the cause of a Quadcopter crash is not checked before takeoff.For the sake of safety,we suggest that you check before every flight.The steps are as follows:1.Turn on the transmitter and select the correct mode.Please confirm that the arming switch on the transmitter is in the“disarmed”position and throttle is all the way down;2.Please perform a physical inspection of the Quadcopter for damage.If there is damage, please repair first;3.Please comfirm the propeller is in the right direction and the propeller nut is locked, otherwise there is a risk of crash;4.Check LiPo battery voltage.A fully-charged LiPo should be about4.2volts per cell,or about12.6volts for a3S,or16.8volts for a4S;5.Please comfirm the battery is securely attached to the aircraft by the strap.And secure the balance lead so that it can’t be struck by the props;6.Please Scan the flight area for any safety issues that might be present,such as people or animals;7.Verify that you have clean,strong video in your FPV goggles or screen.If you see interference or you see another pilot’s feed,resolve this issue before flying;8.Arm the quadcopter.Listen for the props hitting anything like an antenna or the battery wire;9.At this stage,take off and enjoy flying.Note:if you choose to fly close to water,please pay attention to the flight safety.It is difficult to salvage the Quadcopter when it falls into the water,and the water in the Quadcopter is not covered by the warranty.21/15Includes:1x Cinebot30Quadcopter 2x HQProp T76MM(pair)1x Battery strap M15*200mm 1x Battery strap M15*220mm 2x Battery Silicone Pads 1x Set of screws1x L-shaped screwdriver 1.5mm 1x L-shaped screwdriver 2mm 1x Antenna fixed tube(pair)1x Key Chain1x GoPro camera mount holder 1x Antenna mount holder 1x Naked GoPro 4S Version 1x Naked GoPro 6S Version Contact Details:Website:https:///。
超级独眼龙FPV ASSISTANT V1.0说明书(BETA版)
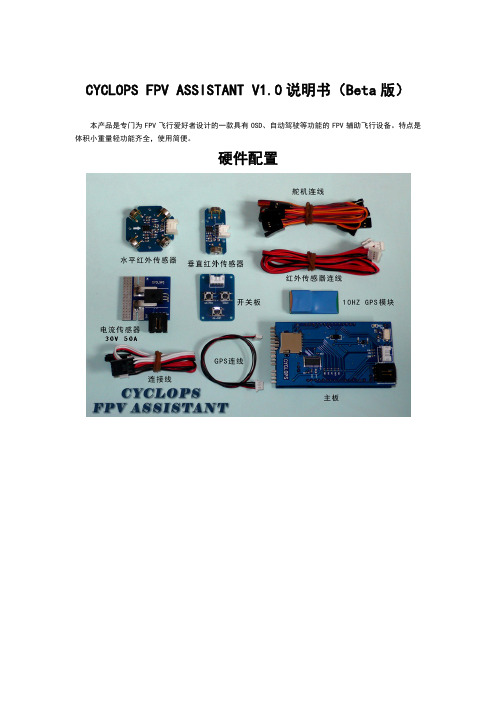
本产品是专门为 FPV 飞行爱好者设计的一款具有 OSD、自动驾驶等功能的 FPV 辅助飞行设备。特点是 体积小重量轻功能齐全,使用简便。
硬件配置
连线说明
电流传感器连线示意图(T 插头需另购)
表1
PCB 标注 功能
需连接设备
提示,PA(辅助手动驾驶模式)、AUTOPILOT(自动驾驶模式)、RTH(自动返航模式),当自动驾驶时, 将旋钮从 AUTOPILOT 切换至 PA 再迅速切回 AUTOPILOT 模式,系统会自动切换下一飞行航点。
4、 建议使用有失控保护功能(F/S 功能)的遥控设备,可将飞行模式切换通道的失控保护设置为自动返 航状态,这样当飞行中遥控器失控模型飞机可自动返航。
RETURN
返回设置主菜单
航点说明
选项
设定说明
备注
第一页、第二页
航点 A---G,H(Home)点
DIS
航点距离
航点与 Home 点的距离,设置范围:0-5000 米
ANG
航点角度
航点到 Home 点的连线与正北的夹角,设置范围:0-359 度
ALT
航点高度
设置范围 0-800 米
RAD
盘旋半径
以该航点为圆心的盘旋半径,设置范围 0-500 米
ELEVON
ROLL PITCH
设定说明
是否在飞行界面上显 示姿态角度参数 电池容量设定 电流传感器置零 空速数据置零 舵机中立点确认
正反舵设定 红外传感器微调
巡航空速设定
空速最大限制值 最低空速限制
升降副翼设定
滚转控制参数 俯仰控制参数
备注
穿越机科目训练

穿越机科目训练
穿越机(FPV竞速)科目训练主要包括以下内容:
1. 安全须知与器材检查:了解飞行场地、确保人员安全,检查穿越机的各个部件,如螺旋桨、电机、电池、遥控器等是否正常。
2. 飞行基础操作:学习如何正确握持遥控器、启动与关闭穿越机、进行基本的飞行操作,如升降、前进、后退、左右转等。
3. 飞行技巧训练:学习如何控制穿越机的飞行高度、速度和方向,进行简单的飞行轨迹训练。
4. FPV(第一人称视角)操作技巧:了解如何佩戴FPV眼镜,掌握FPV画
面的获取和观察,以及如何通过FPV眼镜判断穿越机的位置和方向。
5. 竞速基础训练:学习如何在地图上规划飞行路线,进行基础的竞速练习,如绕桩、穿越障碍等。
6. 实战演练:模拟实际比赛场景,进行多次飞行训练,提高飞行速度和技巧。
7. 故障处理与应急措施:学习如何处理常见的飞行故障,如失联、坠机等情况下的应急措施。
8. 考核与评估:完成各项训练后,进行考核和评估,确保学员具备参加穿越机竞速比赛的基本技能和安全意识。
建议在专业教练的指导下进行训练,以确保安全并取得最佳的训练效果。
固定翼fpv(航测)教程

Part
02
固定翼FPV飞行器介绍
固定翼FPV飞行器类型及特点
类型
固定翼FPV飞行器主要分为小型、中型和大型三种类型,根据任务需求和飞行环 境的不同进行选择。
特点
固定翼FPV飞行器具有飞行速度快、航程远、稳定性好等优点,适用于大范围、 高效率的航测任务。
飞行控制系统组成与功能
组成
飞行控制系统主要由飞控板、GPS模块、陀螺仪、加速度计 等组成,实现对飞行器的稳定控制、导航定位和自主飞行等 功能。
GPS/IMU设备
提供精确的位置和姿态信息,确 保数据采集的准确性。
无人机平台
稳定、可靠的飞行平台,搭载数 据采集设备进行航测任务。
数据预处理与格式转换方法
数据预处理
对原始数据进行去噪、畸 变校正等处理,提高数据 质量。
格式转换
将不同格式的数据转换为 统一格式,便于后续处理 和分析。
常用软件工具
Pix4D、Agisoft PhotoScan等,可实现数 据预处理和格式转换的自 动化处理。
详细阐述了固定翼FPV航测系统 的组成和工作原理,包括无人机 平台、控制系统、传感器、通信 系统等关键部分。
讲解了固定翼FPV航测的飞行原 理和技巧,包括起飞、巡航、降 落等过程中的注意事项和操作要 点。
分享个人学习心得和体会
通过本次学习,我深刻体会到了固定翼FPV航测技术的先进性和实用性,尤其是在 复杂环境下的高效作业能力。
数据准备
空中三角测量
影像匹配
DOM生成
收集航拍获取的原始影像数 据和相关的地理信息数据。
利用已知的地面控制点和航 拍影像进行空中三角测量, 解算出每张影像的外方位元
素。
基于特征点匹配算法,对相 邻影像进行匹配,获取同名
KYLIN250FPV调试指南

KYLIN 250FPV 调试指南版本号本指南主要是针对购买KYLIN 250FPV ARF版本的爱好者进行初步安装及设置而编写的首先爱好者购买了KYLIN 250FPV的ARF版本,需要连接到自己遥控器的接收机并进行CC3D的软件设置才能使用;一.将接收机用双面胶粘贴在机身的上板并插上连接线,首先要了解遥控器是什么类型的接收机,目前有四种接收机,如果不了解清楚,将会影响到后面的设置而无法使用;1.PWM接收机:遥控器都是用PPM的制式发送给接收机,接收机再把PPM信号转换为PWM分为N个通道输出,需要连接多根信号线,就是我们所用的标准接收机,这种接收机我们统称为PWM接收机;2.PPM接收机:直接输出PPM信号出来的这种接收机才能称之为PPM接收机,通常由一个通道输出,无需多根信号线,需要将信号线进行跳线,将随机配送的多线信号线的第一通道白红黑改为灰红黑即可,插线时只需要将第一条三线插头插入第一通道,其他的2-6通道不用插线,跳线如下图:跳线之前跳线之后3.SBUS接收机:是总线通信协议,使用两条线进行通信,一条是地线,一条信号线,这也是目前最流行使用的接收机;4.DSM接收机:这是JR遥控器使用的通信协议,在使用时设置上不同于FUTABA接收机,在后续的设置中要注意;二.连接线的插法有三种:1.如果是使用的普通PWM接收机,需要连接多条线的信号线(机体己自带),并将SBUS端口的信号线拆除,拆除时需手指用力压着插座,小心拔出SBUS端口信号线,否则容易拉坏端口插座,信号线插线顺身上的SBUS接口和遥控器的接收机(机体己自带),并将PWM端口的多线信号线拆除,同样需小心损坏端口插座;3.如果使用JR的DSM接收机,则需将接收机自带的信号线插到机身上的DSM插座,(连接前需要将信号线进行重新跳线,具体跳线方式参考下图说明)在以后的生产批次中则无需挑线,仅限此批生产的产品;DSM2/ DSMX卫星接收机挑线图1.原来的DSM2/ DSMX卫星接收接线2、使用小刀将插座卡扣挑开将黑和橙两条线拉出对调后重新插入3.挑线后视图二.把遥控器打开,设置成固定翼模式,并将第五通道设置成SWE的三档开关;三.当完成了接线并设置好遥控器后,下一步需要在您的电脑中安装CC3D设置软件并对机体内置的CC3D进行设置;四.CC3D软件和调试指南及说明书请登入以下链接进行下载:1.+software+downloads2.KDS官方网站说明书下载页面进行下载本机的软件版本是RELEASE-15.02.02 如爱好者需要其他版本可从CC3D 官网自行下载;1.注意下载时根据您电脑的系统选择相对应的软件:如果您的电脑OSX系统请下载如果您的电脑是windows系统2.当完成下载并安装后即可双击打开您桌面的上的软件图标显示如下页面:3.用USB连接线将电脑和FPV机体进行连接;4.点击软件中的安装向导图标,进入软件的设置向导页面如下图点击下一步出现更新固件页面下图:点击Upgrade等进度条满格并静止时再次点击下一步出现下图:无需更改直接再次点击下一步出现下图:这时会提示选择接收机类型:共4个选择,请对应前面介绍的接收机类型进行选择并点击下一步,此处如选择错误后续接收机将无法工作;点击下一步选择飞行器的种类如下图:有多轴飞行器,固定翼直升机,遥控车等等,这时我们应该默认选择多轴飞行器并点击下一步如下图:默认选择四轴X型;点击下一步选择进行电调的选择如下图:此时出现三个电调选择:标准电调,高速电调,oneshotESC本机自带的是oneshotESC电调,如使用PPM,SBUS,DSM等接收机时则上图中oneshotESC电调会显示蓝色,而不是上图的灰色,可选择oneshotESC并点击下一步;但如果使用PWM接收机时则不能使用,需对电调进行修改,修改方式如下:拆开FPV底板,将PCB电路板中电调中的OS标识处用烙铁将焊点去除,使原来连通的焊点分开无焊锡即可,这是将oneshotESC电调更改为高速电调;重新安装好FPV底板,在软件中选择高速电调并点击下一步出现下图;这时己基本完成了设备的配置,点击下一步出现下图:这时应将多轴置放在平稳的地方,点击Calculate键进行FPV的水平校准,当进度条满格时点击下一步出现下图:此时将上图中三个方框选项打勾,并保证正确按照三项要求操作,即拆桨,检查没有接电池通电,己理解安全注意事项;完成后按下列步骤进行电调校准1.确认所有安全须知2.点击开始扭钮,此时电池尚未连接3.接上电池4.等待电调通过电机发出的标准提示音5.点击停止6.等待校准确认提示音,油门行程进度条退回到900us7.断开电池点击下一步进行电调输出的校准如下图:点击下一步出现下图:现在向导将引导您校准上图中高亮显示的马达,请注意观察马达是否和图中所示的顺时针或逆时针方向旋转,如电机转动和图中相反,请将FPV机臂下电机线插头中的任意二根对调即可,为了帮助您找到该电机的怠速点,请点上图中的开始按钮,拖动滑动条直到电机开始以最低速稳定转动,完成后请点击停止按钮,这时完成了第一个马达的校准,点击下一步校准用同样的方式校准另外三个马达直到出现下图:此处默认即可,点击下一步出现下图:点击Save按钮保存之前所有的设置,直到出现下图:请点击下方完成按钮,回到主页面如下图:此时我们己完成了CC3D必需的所有基础设置,现在我们需要对接收机进行检查设置是否正确,请点击下方configuration后按以下说明操作:1.如果您在前面选择PWM接收机请检查设置项如下步骤:移动光标到左上角的Hardware图标并点击出现下图,并检查FlexiPort和main port端口和下图设置是否一致,如果不同,需更改和下图一样并点击Save键保存设置:2.如果您在前面选择PPM接收机请检查设置项如下步骤:移动光标到左上角的Hardware图标并点击出现下图,并检查FlexiPort和main port端口和下图设置是否一致,如果不同,需更改和下图一样并点击Save键保存设置:3.如果您在前面选择SBUS接收机请检查设置项如下步骤:移动光标到左上角的Hardware图标并点击出现下图,并检查Flexi Port和main port端口和下图设置是否一致,如果不同,需更改和下图一样并点击Save键保存设置:4.如果您在前面选择DSM接收机请检查二个设置项如下步骤:第一设置项:移动光标到左上角的Hardware图标并点击出现下图,并检查Flexi Port和main port端口和下图设置是否一致,如果不同,需更改和下图一样并点击Save键保存设置:第二设置项:移动光标到左侧的Input图标以及选择上方RC Input 选项出现下图,并检查Input channel configuation的内容和下图设置是否一致,如果不同,需更改和下图一样并点击Save键保存设置:请再次确认你选择的接收机和对应的参数是否正确;下面我们将对遥控器进行校准,请点击左侧Input图标:出现安全提示,点击上图中的OK即可出现下图:点击下一步如下图:再将光标移至左侧遥控器Input图标点击图后如下图,此处有二个选择,请选择固定翼和多轴飞行器后点击下一步:根据您的遥控器来选择左手还是右手油门,即传统中说的是日本手model1还是美国手model2;点击下一步即可按照图中动画所示方向拨动摇杆或控制钮直到完成最后的设置,最后进行解锁设置时一定要完全理解如果解锁和上锁,否则最后因为不明白而不知道如果解锁,误以为设置错误,这里是很多爱好者容易犯的错误;完成所有的设置以后请一定记得点击保存按钮。
OSD FPV版使用指南
建议装上。 2.PPM:当直接与接收机连接时,设 Y,保存,重启飞控板生效。 3.NTSC:如果是 NTSC 格式的视频,设 Y。保存,重启飞控板生效。 4.FlyWn:装备飞翼时,设 Y。保存生效。横滚增益与俯仰增益可适当调小,1 通道接左副翼,2
此值,20 以下为最好。超过 100 时,加速度传感器的有效信号因震动过大,导致放大器饱和而被
淹没。当用橡筋悬挂时,此值能小到 20 以下,可抗山寨 450 级别的震动。
可参考:757-2 装机实例.pdf
五、地面测试
测试前把飞机固定好或者把桨拨掉。
1、通过 SetAi(设置空速)(如果未安装空速计,跳过),设置空速传感器零位。这时,速度数
五、校准 仅用于设置飞控板的水平状态。点击前应保持飞控板的水平静止状态。点击后,应等数秒,直
到地面站收到新的姿态数据校准才结束。 六、空速
用于校准空速传感器和电流传感器的零位。 七、记录
二、各参数的说明:
序号
名称
0,1,2,3 ,Байду номын сангаас,6
各通道增益值
5
联动系数
7
方向限定值
8
油门最大值
9 10 11 12 13
14,15
油门平飞值 电压校正系数 安全高度 加速度系数 接近距离 俯仰和倾斜限 定值
17,18 副翼和升降 D
19
偏航 P
20
偏航 D
21
空速校正系数
22
速度设定值
23
气压计修正系 数
空速:当使用空速传感器时,打上勾。空速传感器在辅助定 高模式、自主都起到重要作用,建议装上。
kyfpv使用说明书
kyfpv使用说明书
1、本操作步骤,随飞行器箱子携带或自行打印。
每次飞行均按此步骤操作。
2、将箱子放在平整地面,将拉链拉至转角后末端。
(这步很重要,若未拉至转角后末端,易损坏拉链造成箱子损坏。
)
3、打开箱子,取出飞行器放置在平整的地面上。
4、将动力电池安装上机体上。
电池按钮短按一次长按一次2秒开启飞机电源。
5、遥控器短按一次再长按一次2秒开启遥控器电源
6。
待遥控器绿灯亮,快速拨动变形开关4次,将飞机运输模式转换为降落模式。
转换成功后,飞机电池按钮短按一二次长按--次2秒关团飞机电源(这个步骤很重要,切勿在通电的情况下安装云台相机)7。
将云台相机安装上飞机,并锁定。
(白线对齐后根据提示方向锁定)。
凤凰fpv遥控器操作方法
凤凰fpv遥控器操作方法
1. 凤凰FPV遥控器开关启动:按下遥控器上的电源键,将遥控器开关启动。
指示灯将绿色闪烁,表示设备正在加载或连接中。
2. 连接凤凰FPV无人机:将凤凰FPV无人机的电池开关打开,同时按下无人机上的连接按钮,然后在遥控器上轻松按下配对键,就可以连接。
3. 加载室内位置或GPS系统:在飞行时,您可以选择使用遥控器上的不同按钮来加载您所在的位置或GPS系统。
4. 飞行模式选择:遥控器上有不同的飞行模式可供选择。
您可以通过按下遥控器上的不同按钮来切换模式。
5. 控制无人机:遥控器上有许多控制按钮和杆,在飞行时,您可以使用它们来控制无人机的方向、高度和速度。
6. 返回起飞点:您可以按下遥控器上的“返回”按钮来将无人机飞回起飞点。
无人机将自动返回到起飞点并降落。
7. 紧急情况急停:如果您遇到紧急情况,需要立即停止无人机的飞行,您可以按下遥控器上的“急停”按钮,停止无人机的运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
fpv 相册傻瓜式教程ByFPV 相册傻瓜式教程By Shine 2007-11-101fpv 相册傻瓜式教程ByFPV相册确实是一个很不错的相册。
但很多新手都刚开始都不知道怎么使用。
在论坛和群上也 有很多网友不断地问这儿怎么设置、那儿又怎么设置。
一次一次说,觉得有点累了。
还不如写个使用说明, 让那些新手们尽快入手。
不过在这儿声明:这并不是官方的说明书,只是把自己使用这个相册以来的心得 体会作一下总结而已。
刚开始部分也参考了官方网站的帮助说明。
如果你对FPV相册已经用得很熟悉了,你 就没有必要再往下看了,那样也许是浪费你的时间,说不定看完了还要骂我一通。
所以,本教程公适合新 手使用。
通过这本教程可以让新手们少走点弯路,也许我所讲的里面还存在一些问题,如果有谁发现了, 请及时向我提出。
演示相册:/fpv4/pic篇一 — 安装 FPV 和配置服务器QUOTE: 要使用 FPV 你首先要有自己的空间并确认空间支持以下功能: 1.支持 ASP 2.支持 FSO (File System Object) 文件读写 3.支持 ASPJPEG 组件,用于生成缩略图 4.目录具有读写权限 5.支持父目录 (以上五点服务器必须支持,如果不支持的话,以后可能会遇到很多莫名奇妙的问题) 小提示 如何让服务器支持以上 5 点? 1.需要 windows 系统,安装自带组件 IIS 即可 2.一般装了 IIS 的服务器都会开放此功能,如果未开,请联系服务器管理员或空间提供商开放此 功能 3.需在服务器上装一个名为 ASPJPEG 1.5 或以上版本的图片处理组件,下载地址: /redirect.php?tid=3422&goto=lastpost#lastpost. 注意:是在服 务器上装,不是在自己的电脑上装 4.一般购买的空间都会支持,如果是自己的服务器,将 fpv 目录的 guest 或 anyone 用户的可写 权限打开,不用怕,几乎所有服务器都是这样设置 5.windows 2003 会默认关闭此功能,在 IIS 设置选项里将 上级目录支持 打勾即可 ASP 探针下载地址:/download/asptest.rar2fpv 相册傻瓜式教程By篇二 — FPV v4 beta6 的详细使用方法 第一步 相册安装和配置下载压缩包后解压,并用记事本打开 fpv_admin/MyConfig.asp 文件,更改其中的参数 MyConfig.asp 中的参数说明(未在此列出的参数不允许修改,否则会出错): C_Login_User_Name : 后台管理用户名 C_Login_User_Password : 后台管理密码 C_MdbName : FPV 主数据库路径 C_exifMdbName : 储存图片 EXIF 信息的数据库路径 C_PhotosPath : 图片文件根目录,以 fpv_admin 为参考路径 C_SmallImageWidth : 生成的缩略图的最大宽 C_SmallImageHeight : 生成的缩略图的最大高 C_UseApplication : 是否使用缓存机制,如果使用缓存机制,自动读取本地目录速度会 很快,适用于目录图片不经常上传更新的情况,如使用此功能,则不能自动获取新上传的图 片,需要在后台更新前台 XML 才会更新缓存.如果使用此功能,等于将目录图片自动读取 到服务器缓存,前台需要时会自动从缓存直接读取,不用再次检索目录图片,速度与直接读 取 XML 文件差不多。
修改好管理密码等参数后,接着用记事本打开 index.asp (免费为 index.htm 或 index.html )将其中第四行的 <title> 标签的内容换为自己的相册或产品展示页标题 改好后将所有文件上传到服务器.第二步 后台管理下面就 FPV 相册后台的各个功能作一下具体的说明: 其实在上面 yellow 中给出的说明已经很详细了,但对于很多新手来说,可能还存在一些问题,下面 以图文兼并的方式来对 FPV 相册的各个功能作一下详细的说明。
如果你对 FPV 相册已经用得很熟悉了, 你就没有必要再看下面的部分了。
进入相册后台管理页面: http://localhost/pic/admin.html(我的自己改过),将进入到如下 界面。
3fpv 相册傻瓜式教程By输入你在 fpv_admin/MyConfig.asp 中设置的用户名和密码,就可以进入后台管理页面了。
中间可能要等待那么一点时间,有点耐心。
如下所示:FPV 有十一个功能按钮,下面我们来分别讨论他们的功能和使用方法: 1、总体设置 界面如下所示:4fpv 相册傻瓜式教程 网站名称:这就不用我说了吧。
By皮肤选择:FPV4 自带有两个皮肤可供选择,一个有小蛇的和一个没有小蛇的。
如下所示:其中:Black 是有小蛇的,也是默认的 Skin,Black Full Version 则是没有 Skin 的。
缩略图左右间距:是用于调整缩略图界面的图片的左右间距 缩略图上下间距:是用于调整缩略图界面的图片的上下间距 菜单 X 坐标(左边距):用于设置菜单栏的左边距离是多少 菜单 Y 坐标(上边距):用于设置菜单栏的上边距离是多少水印设置: 水印文件:设置你要在图片上加入水印的文件,放在 FPV 相册的根目录下。
通过设置水印位置可以 设置水印在图片的什么地方显示。
注意啦:如果你的水印文件找不到,将导到图片无法显示! 小图是否逐个显示?:如果选中该项,则小图将会逐个显示。
水印效果如下:5fpv 相册傻瓜式教程By默认为打开大图模式?:如果选中该项,则在你进入你相册的每个分类时,将会默认为打开大图。
如 果不选中该项,则以缩略图方式打开。
是否显示按钮鼠标提示?:随你的便吧!如果你是新手,对相册的功能不是很熟悉的话,见意选中 如果选中第一个,则你打开相册时,将进入你选择的默认分类。
如果你选中第二个,则进入相册首页时将默认为打开文件夹的形式。
如下所示:6fpv 相册傻瓜式教程By完成总体设置后,选择保存。
再点击:应用设置到前台 xml。
注意:相册中的所有修改完成后,都点击应用设置到前台 XML,前台刷新后才会应用刚才的设置。
否则 你的修改将不会在前台显示出来! 还有我们在添加分类比较多时,建议大家添加几个后就点一次保 存,尤其是在 3.5 版里面,经常添加了很多分类时想要保存时却保存不了了。
又得从头工始,因此, 养成一个经常保存的好习惯,可以给你省下很多不必要的麻烦。
2、分类添加、修改和删除 用于添加、删除和修改分类。
操作界面如下:7fpv 相册傻瓜式教程By选中一个分类,输入分类名称,再点击为当前节点添加子节点,则将该子节点添加进入了刚才选中的 分类中去了。
如果是要添加根节点,则选中添加根节点就可以了。
将目录结构转换为分类:是将 FPV 相册 中的目录转换成分类。
全部展开是将目录结构全部展开。
如果要对一个分类名称进行修改,你只需要选中 该目录,在下面要修改或删除的分类名称中进行修改或删除。
完成上述操作后,点击保存。
完成后,生成 xml。
3、分类详细设置 用于对分类进行一些具体的设置,操作界面如下:8fpv 相册傻瓜式教程By选中你要设置的分类,选中图片分类,再选择你的数据源,即你的图片是来源于列表还是本地目录。
这儿选中的来源于列表。
点击选择另一个,可以选列表文件。
选中你的数据源后,单击确定就 OK 了。
密码设置:单击密码设置可以设置该分类的访问密码。
分类标志图的使用:单击分类标志右边的编辑按键,进入分类标志图的选择从缩略图中选择你要显示的图片,单击即可在下面显示出来,前台显示效果如下:9fpv 相册傻瓜式教程By分类简介:上图没有分类简介,设置分类简介后效果如下:鼠标放在小图片上时的提示文字:用于缩略图时显示。
效果如下所示:10fpv 相册傻瓜式教程 4、图片列表编辑By用于在线编辑图片列表或在线生成图片列表。
完成编辑后,保存文件并生成 xml。
选择你要编辑的列表文件,该文件就会在中间的编辑区显示出来。
为图片制造缩略图,是用于为本地 上传图片制造缩略图用。
点击就会出现:也可以直接点击按键为上传的图片制造缩略图。
方法同上面的一样,这儿就不再演示了!注意:生成缩略图要求服务器支持 ASPJPEG 组件。
11fpv 相册傻瓜式教程By图形化列表化管理:是用于以图形化界面来编辑图片列表。
个人觉得这个功能非常好,但在设置中往 往又会出现一些问题!该界面如下所示:去除重复记录是用于去掉列表文件中相同的部分。
完成该设置后,保存并生成 xml。
5 本地图片信息设置 用于对本地图片进行设置。
操作界面如下:12fpv 相册傻瓜式教程By选择你要编辑的分类,在中间的编辑框中就会显示该目录中的所有图片,再选择你要编辑的图片,在 右边的方框中就会显示该图片的缩略片,以方便我们编辑。
在标题中输入该图片的标题,在介绍中,输入 你对该图片的说明。
完成后,保存并生成 xml。
在前台显示效果如下:注意,只有设置成“分类详细设置”中将图片来源于本地目录的分类才会有效,否则将显示6、评论管理 用于管理游客对图片的评论。
操作简单,我就不多说了。
界面如下:7、为图片制造缩略图 在前面已经说过了,这儿就无须再谈了。
8、上传文件 用于在线上传文件。
界面如下:13fpv 相册傻瓜式教程By单击从已设置的分类获取,选择要上传到的文件夹。
“添加文件”用于选择你要上传的文件,通过上 移和下移可以设置文件的排序。
删除可以删除已添加的文件,单击开始上传就可以将这些文件上传到你的 网站上了。
9、EXIF 信息编辑 用于编辑相片的 EXIF 信息。
界面如下:14fpv 相册傻瓜式教程By在左边的分类中选择你要编辑 EXIF 信息的图片,选中图片,则在右边的信息栏中将自动读取该相片 的 EXIF 相关信息。
完成后,单击保存并生成 xml。
10、应用设置到前台 用于在更改设置后,更新 xml 文件。
我们在更改每一个设置后,都必须点击该项,我们所做的设置 才能在前台显示出来!这对于很多新手来说,是特别容易忽略的地方,记住啦! 11、关于 FPV 用于显示 FPV 相册的更新信息……篇三 — FPV3.5 使用说明很多网友都觉得 FPV3.5 比 FPV V4 要好用,而且现在免费版的也只有 3.5,FPV4 目前还没有免费版,因些 下在对 FPV3.5 的使用作一下简单的说明,没有上面那么详细了,也就说说主要的吧…… FPV3.5 下载地址:/download/fpv3.5.rar FPV3.5 的一些常用 Skin 请下面这个地址:15fpv 相册傻瓜式教程By下面是全屏模式:用于显示 FPV 相册的更新信息…… 1、后台管理管理界面如下:16fpv 相册傻瓜式教程By2、总体设置和 FPV V4 差不多,就少了 Skin 的选择,但在 3.5 中有全屏模式这个选项。