FOC电流环控制代码分析
foc双电阻采样代码 -回复
foc双电阻采样代码// 磁场定向控制(FOC)双电阻采样代码示例// 设置电机参数float Rs = 0.1; // stator 电阻float Ls = 0.001; // stator 电感float Ts = 0.001; // 采样时间间隔// 定义当前电流和电压float Is_alpha = 0.0; // α轴电流float Is_beta = 0.0; // β轴电流float Us_alpha = 0.0; // α轴电压float Us_beta = 0.0; // β轴电压// 定义目标电流和电压float Id_ref = 0.5; // α轴目标电流float Iq_ref = 0.3; // β轴目标电流float Ud_ref = 0.0; // α轴目标电压float Uq_ref = 0.0; // β轴目标电压// FOC 控制算法void FOC_Control(){// 计算电流误差float Id_error = Id_ref - Is_alpha;float Iq_error = Iq_ref - Is_beta;// 计算电压参考值Ud_ref = Rs * Id_ref + Ls * (Id_error / Ts);Uq_ref = Rs * Iq_ref + Ls * (Iq_error / Ts);// 更新电压误差float Ud_error = Ud_ref - Us_alpha;float Uq_error = Uq_ref - Us_beta;// 更新电压输出Us_alpha += Ud_error;Us_beta += Uq_error;// 更新电流Is_alpha = (Us_alpha - Ls * (Id_error / Ts)) / Rs;Is_beta = (Us_beta - Ls * (Iq_error / Ts)) / Rs;}// 主循环void loop(){// 获取电流采样值float Is_sampled_alpha = analogRead(A0);float Is_sampled_beta = analogRead(A1);// 转换为实际电流值Is_alpha = (Is_sampled_alpha - 2048) / 2048.0 * 10.0; Is_beta = (Is_sampled_beta - 2048) / 2048.0 * 10.0;// 执行FOC控制算法FOC_Control();// 输出电流和电压Serial.print("Is_alpha: ");Serial.println(Is_alpha);Serial.print("Is_beta: ");Serial.println(Is_beta);Serial.print("Us_alpha: ");Serial.println(Us_alpha);Serial.print("Us_beta: ");Serial.println(Us_beta);// 延时采样时间间隔delay(Ts * 1000);}void setup(){// 初始化串口通信Serial.begin(9600);// 设置电流采样引脚为输入模式pinMode(A0, INPUT);pinMode(A1, INPUT);}void loop(){// 主循环while (true){// 执行FOC控制算法FOC_Control();// 采样和更新电流值float Is_sampled_alpha = analogRead(A0);float Is_sampled_beta = analogRead(A1);// 将采样值转换为实际电流值Is_alpha = (Is_sampled_alpha - 2048) / 2048.0 * 10.0;Is_beta = (Is_sampled_beta - 2048) / 2048.0 * 10.0;// 输出电流和电压Serial.print("Is_alpha: ");Serial.println(Is_alpha);Serial.print("Is_beta: ");Serial.println(Is_beta);Serial.print("Us_alpha: ");Serial.println(Us_alpha);Serial.print("Us_beta: ");Serial.println(Us_beta);// 延时采样时间间隔delay(Ts * 1000);}}void setup(){// 初始化串口通信Serial.begin(9600);// 设置电流采样引脚为输入模式pinMode(A0, INPUT);pinMode(A1, INPUT);}。
foc(电机矢量控制)程序分块细解

foc(电机矢量控制)程序分块细解下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!电机矢量控制(FOC)是一种用于控制交流电机的先进技术,它能够精确控制电机的速度和位置,提高电机的效率和性能。
stm32 foc电流环计算
STM32 FOC电流环计算1. 引言FOC(Field Oriented Control)电流环控制是一种广泛应用于交流电机和永磁同步电机控制的技术。
它通过将三相交错的交流电流转换为直流电流,再利用电流环控制实现对电机的精准控制。
在STM32单片机上实现FOC电流环计算是一项复杂但重要的任务,本文将从基本原理和具体计算方法等方面来介绍STM32 FOC电流环计算的相关知识。
2. 基本原理FOC电流环控制的基本原理是将三相交错的交流电流转换为直流电流,然后再通过PID控制器等方式对直流电流进行控制,从而实现对电机的精准控制。
在FOC电流环控制中,需要对交流电流进行坐标变换和逆变换,以及通过空间矢量调制技术来实现对电机的控制。
在STM32单片机上实现FOC电流环控制,需要充分理解FOC的基本原理,并且掌握相关的数学知识和编程技巧。
3. FOC电流环计算3.1 dq坐标变换在FOC电流环控制中,需要将三相交错的交流电流转换为直流电流,这就需要进行dq坐标变换。
dq坐标变换即是通过正弦变换和余弦变换,将三相交错的交流电流转换为直流电流,这里的变换矩阵即是Park变换矩阵和Clarke变换矩阵。
在STM32单片机上实现dq坐标变换,需要通过数学计算和定点运算来实现。
3.2 逆变换在FOC电流环控制中,还需要将控制好的直流电流逆变换为三相交错的交流电流,这就需要进行逆变换。
逆变换即是通过逆Park变换和逆Clarke变换,将控制好的直流电流逆变换为三相交错的交流电流。
在STM32单片机上实现逆变换,同样需要通过数学计算和定点运算来实现。
3.3 空间矢量调制在FOC电流环控制中,还需要通过空间矢量调制技术来实现对电机的控制。
空间矢量调制即是通过计算合适的PWM波形,来控制电机的转矩和速度等参数。
在STM32单片机上实现空间矢量调制,同样需要通过数学计算和定点运算来实现。
4. STM32 FOC电流环计算的实现在STM32单片机上实现FOC电流环控制,需要充分理解FOC的基本原理,并且掌握相关的数学知识和编程技巧。
foc 电流环 增量式pi 绝对式pi

增量式PI和绝对式PI控制都是电流环中常见的控制方式,它们各有优劣,适用于不同的场合。在电力系统中,选择合适的控制方式可以提高系统的稳定性和控制效果,从而更好地保证电力设备的安全运行。希望通过本文的介绍,能够对增量式PI和绝对式PI控制有更深入的了解,为电力系统的控制和运行提供一定的参考。
让我们来看看绝对式PI控制。绝对式PI控制是一种最基本的PID控制器形式,其输出只依赖于控制器的输入和输出。在绝对式PI控制中,控制器的输出是由控制器输入和积分项的乘积得到的,即:
\[u(t) = K_p e(t) + K_i \int_{0}^{t} e(\tau)d\tau\]
\(u(t)\)为控制器的输出,\(e(t)\)为被控对象的偏差值,\(K_p\)为比例增益,\(K_i\)为积分增益。绝对式PI控制通过比例项和积分项的调节来实现对被控对象的控制,适用于对控制品质要求不高的场景。
另一种常见的PI控制器是绝对式PI控制器,在FOC电流环中也有着广泛的应用。绝对式PI控制器与增量式PI控制器相比,它的主要特点在于计算误差时是直接根据期望值和当前值之间的差值进行计算,而不是根据误差的变化率。这种控制方式可以更加精准地调节电机的电流响应,但是对系统的稳定性和鲁棒性要求也更高。
在实际的FOC电流环控制中,选择增量式PI控制器还是绝对式PI控制器取决于具体的应用环境和性能需求。对于一些要求电机控制效果更加稳定和精准的场合,可以选择绝对式PI控制器,而对于一些要求系统对外部扰动具有更好抵抗能力的场合,可以选择增量式PI控制器。在实际应用中也可以根据具体情况进行优化和调整,以获得最佳的控制效果。
无刷电机开环foc代码

无刷电机开环foc代码无刷电机开环FOC代码无刷电机是一种常见的电机类型,它不依赖于碳刷与电刷之间的摩擦来实现转动,因此具有高效率、低噪音和长寿命的特点。
FOC (Field-Oriented Control,场向量控制)是一种常用的控制算法,可以提高无刷电机的性能和稳定性。
在无刷电机开环FOC代码中,我们主要关注如何使用FOC算法来控制无刷电机的转速和转矩。
开环FOC代码的实现主要分为以下几个步骤:1. 初始化:首先,我们需要初始化无刷电机的相关参数,包括电机的极对数、电机的电磁参数等。
这些参数将用于后续的控制算法中。
2. 速度测量:为了实现无刷电机的速度控制,我们需要测量电机的转速。
常用的方法是使用霍尔效应传感器来测量电机的转子位置,然后计算出电机的转速。
3. 电流控制:在FOC算法中,我们需要控制无刷电机的电流。
首先,我们需要将输入的电流转换为电机的abc坐标系下的电流。
然后,我们使用PI控制器来控制电机的电流,使其达到期望值。
4. 转速控制:在FOC算法中,我们需要控制无刷电机的转速。
首先,我们需要将输入的转速转换为电机的abc坐标系下的转速。
然后,我们使用PI控制器来控制电机的转速,使其达到期望值。
5. 空间矢量PWM控制:在FOC算法中,我们使用空间矢量PWM 控制来控制无刷电机的转矩。
首先,我们需要根据电机的abc坐标系下的电流和转速,计算出空间矢量PWM的占空比。
然后,我们根据占空比来控制电机的转矩。
以上就是无刷电机开环FOC代码的主要实现步骤。
通过这些代码,我们可以实现对无刷电机的速度和转矩的精确控制。
当然,为了更好地控制无刷电机,我们还可以添加一些其他功能,比如过流保护、过压保护等。
总的来说,无刷电机开环FOC代码是一种常用的控制算法,可以实现对无刷电机的精确控制。
通过合理的参数调节和控制算法的优化,我们可以使无刷电机达到更高的性能和稳定性。
无刷电机开环FOC 代码的实现不仅可以应用于无刷电机驱动系统,还可以应用于其他需要精确控制的领域,比如机器人、自动化设备等。
foc电流环pi调试方法
foc电流环pi调试方法
FOC(Field Oriented Control)电流环PI调试方法如下:
1. 把速度环的PI都设定为0。
2. 把Q轴的PI也都先设定为0。
3. 把速度环的输出也设定为0(其实把速度环的PI设定为0估计就不需要这一步了,但是为了保险还是这样设定了)。
4. 电流环输出的Ud使用反馈回来的Ud,Uq自己手动给定。
5. 给定D轴的P,慢慢调试I(当然不合理的话P也要适当调整)。
6. 检验调试成功标准:查看反馈的id是否在0附近波动,注意是很小的波动。
上述步骤完成后,应确保调试成功,如果仍有问题,可以请教专业人士获取帮助。
FOC电流环控制代码分析
(2^15 )*4 = 32768* 4 = 13 1072 #define T (PWM _PERIO D * 4)
,这里 有一个
4倍的
放大。 然后电 流采用
了Q15
表示( 左对齐
),2^ 15 = 3 2768。
所以最 后计算 需要除
以1310 72。 #define divSQR T_3 (int 32_t)0 x49E6 / * 1/sqrt (3) in q 1.15 for mat=0. 577331 5*/ Q15,
去掉小数点就是18918 = ox49E6
Park变 换 :
Curr_Input.qI_Component1 为 Ialpha, Curr_Input.qI_Component2 为 Ibeta , Theta为电角度 Iq= Curr_Output.qI_Component1 = Ialpha *cos(Theta)-Ibeta *sin(Theta) Id= Curr_Output.qI_Component2 = Ialpha *sin(theta)+Ibeta *cos(Theta)
反 Park变 换 :
Volt_Input.qV_Component1 为 Vq, Volt_Input.qV_Componen2 为 Vd , Theta为电角度 Valfa = Volt_Output.qV_Component1 =Vq*Coபைடு நூலகம்(Theta)+ Vd*Sin(Theta) Vbeta = Volt_Output.qV_Component2 =-Vq*Sin(Theta)+ Vd*Cos(Theta)
Clark变换:
MC_Math.c
Curr_Input.qI_Component1 为 Ias, Curr_Input.qI_Component2 为 Ibs Ialpha = Curr_Output.qI_Component1 = Ias
foc双环代码
foc双环代码
FOC(Field Oriented Control)双环控制代码是指采用磁场定向控制(FOC)技术的电机控制系统中的双环控制算法的代码实现。
FOC是一种先进的电机控制技术,通过磁场定向控制实现对电机的精确控制,广泛应用于无刷直流电机(BLDC)、永磁同步电机(PMSM)等电机控制领域。
FOC双环控制算法包括速度环和电流环两个控制环路,其中速度环用于控制电机的转速和方向,电流环用于控制电机的输出电流。
在双环控制算法中,首先通过速度环的调节器计算出电流指令,然后通过电流环的调节器将电流指令转换为PWM信号,最后通过PWM信号控制电机的输入电压,从而实现电机的精确控制。
具体的FOC双环控制代码实现会因不同的电机控制系统而有所不同,但基本的思路是相似的。
一般来说,FOC双环控制代码的实现需要使用到数字信号处理器(DSP)等硬件平台,以及相应的电机驱动芯片和传感器等硬件设备。
同时,还需要根据具体的电机参数和控制要求进行相应的参数设置和调试。
ST_FOC库问题解答

非常感谢购买我们套件的网友,下面是本人针对客户反映的使用ST马达库V2.0的问题解答如下,稍后时间我会再写个关于整个软件代码的运行分析给大家。
1. 你的代码与V2.0库的示例程序有哪些不同?有哪些新的函数定义,等等。
基本框架是一样的,主要是为了让初学者尽快上手,所以没有加过多的软件技巧,主要是为了清晰的实现FOC+SVPWM的算法,然后为了这个基本要求,同时也是为了以后开发工作的需要,增加了TFT汉字支持,图形显示,FAT文件支持,以上是为了实现HMI(人机界面的需要)必须的,同时对于大量数据储存的要求,增加了大容量的串行FLASH以及SD卡的支持,这是为了扩充以后对于大量输入输出数据的需要增加的。
然后增加了第二编码器支持,是为了增加POSITION(位置)模式的需要,因为现在一个基本的SERVO,都需要3-4个CONTROL LOOP(控制环),所以我们预留了一个输入TIMER作为该功能扩展需要(该功能硬件资源已经准备好,限于时间软件代码没有完善,需用户自己扩充)。
以上功能具体的实现函数,这里不好说,毕竟代码太庞大了,我们主要增加了4个源代码文件:SPI_FLASH.C、ILI932x.C、SD.C、tff.c,分别针对上面的2个功能模块,您可以参考,其他函数都直接做到代码库里面了。
如果想全面了解FOC和SVPWM实现细节,以及控制原理的数字化实现需要您通读代码,当然您也可以不用关注太多。
主要是理解整个程序的构架与流程,这些是最基本的,对于您以后把它移植到您自己的系统中绝对是必须要做的,细节可以大概知道就好了,关于软件基本流程我后边再写个详细的说明文档,建议您仔细阅读今年10月份ST在上海办的2.0版本马达库的培训班,我当时报名了,定金也都交了,但是临时有事情没有成行,所以很遗憾,事后主办方给我提供了电子版的讲义,我觉得仔细读读还是很有帮助的,我会一并把该讲义发给购买我们套件的网友,供您学习参考。
FOC电流环控制代码分析
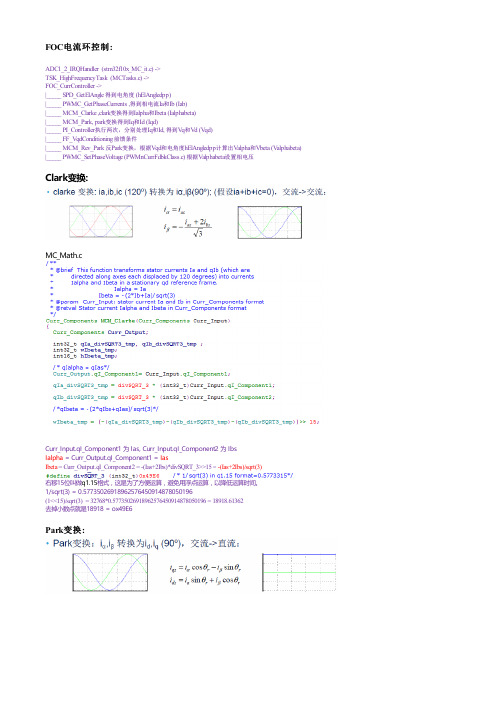
ADC1_2_IRQHandler (stm32f10x_MC_it.c) -> TSK_HighFrequencyTask (MCTasks.c) -> FOC_CurrController -> |_____ SPD_GetElAngle 得到电角度 (hElAngledpp) |_____ PWMC_GetPhaseCurrents ,得到相电流Ia和Ib (Iab) |_____ MCM_Clarke ,clark变换得到Ialpha和Ibeta (Ialphabeta) |_____ MCM_Park, park变换得到Iq和Id (Iqd) |_____ PI_Controller执行两次,分别处理Iq和Id, 得到Vq和Vd (Vqd) |_____ FF_VqdConditioning前馈条件 |_____ MCM_Rev_Park 反Park变换,根据Vqd和电角度hElAngledpp计算出Valpha和Vbeta (Valphabeta) |_____ PWMC_SetPhaseVoltage (PWMnCurrFdbkClass.c) 根据Valphabeta设置相电压
去掉小数点就是18918 = ox49E6
Park变 换 :
Curr_Input.qI_Component1 为 Ialpha, Curr_Input.qI_Component2 为 Ibeta , Theta为电角度 Iq= Curr_Output.qI_Component1 = Ialpha *cos(Theta)-Ibeta *sin(Theta) Id= Curr_Output.qI_Component2 = Ialpha *sin(theta)+Ibeta *cos(Theta)
永磁同步电动机Foc闭环控制详解
永磁同步电动机FOC闭环控制详解一、概述在学习FOC控制前,我对于FOC控制完全不懂,只知道中文叫做磁场定向控制,因公司产品开发需要用到对永磁同步电机(PMSM)进行精确的位置控制,才开始从网上了解什么是FOC,有哪些数学公式,控制的过程是怎么样的,但由于公司没有人知道这一块的知识,所以只能一个人慢慢找资料学习,网上有不少关于FOC的资料,不过讲的都不全面,而且有的还会存在错误,但是不懂的时候也无法分辨对错,所以走了不少弯路。
所以将个人的学习心得记录于此,与大家分享,由于需要对电机进行位置控制,所以使用了14位分辨率的磁编码器。
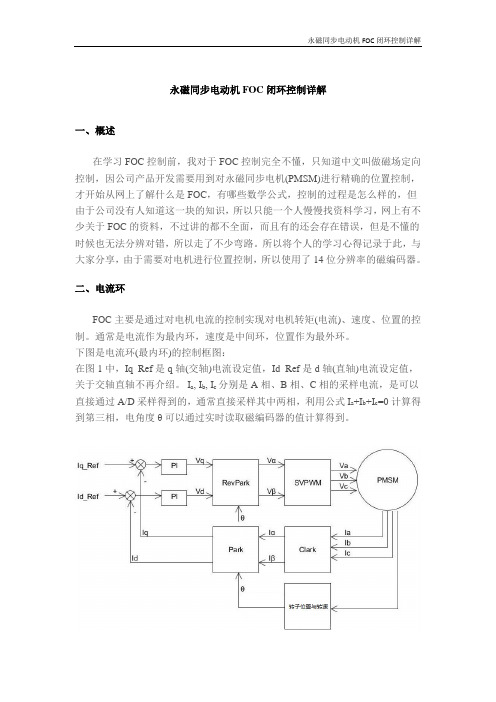
二、电流环FOC主要是通过对电机电流的控制实现对电机转矩(电流)、速度、位置的控制。
通常是电流作为最内环,速度是中间环,位置作为最外环。
下图是电流环(最内环)的控制框图:在图1中,Iq_Ref是q轴(交轴)电流设定值,Id_Ref是d轴(直轴)电流设定值,关于交轴直轴不再介绍。
I a, I b, I c分别是A相、B相、C相的采样电流,是可以直接通过A/D采样得到的,通常直接采样其中两相,利用公式I a+I b+I c=0计算得到第三相,电角度θ可以通过实时读取磁编码器的值计算得到。
图1:电流环在得到三相电流和电角度后,即可以进行电流环的执行了:三相电流I a, I b, I c 经过Clark变换得到Iα, Iβ;然后经过Park变换得到I q, I d;然后分别与他们的设定值Iq_Ref, Id_Ref计算误差值;然后分别将q轴电流误差值代入q轴电流PI环计算得到V q,将d轴电流误差值代入d轴电流PI环计算得到V d;然后对V q, V d 进行反Park变换得到Vα, Vβ;然后经过SVPWM算法得到V a, V b, V c,最后输入到电机三相上。
这样就完成了一次电流环的控制。
三、转速环当对PMSM进行速度控制时,需要在电流环外面加一个速度环,控制框图如下:图2转速环在图2中,Speed_Ref是速度设定值,ω是电机的转速反馈,可以通过电机转子位置传感器(光电编码器)计算得到。
峰岹科技 FU68XX-无霍尔-FOC 调试说明文档-V1.0.0说明书
峰岹科技FU68xx-无霍尔-FOC调试说明文档-V1.0.0峰岹科技(深圳)有限公司Fortior Technology(Shenzhen)Co.,Ltd.深圳市南山区科技中二路软件园11栋2楼203室,518057Room203,2/F,Building No.11,Keji Central Road2,Software Park,High-Tech Industrial Park,Shenzhen,P.R.ChinaTel:86-755-26867710Fax:86-755-26867715Contained hereinCopyright by FortiorTechnology(Shenzhen)Co.,Ltd all rights reserved.修改记录版本号:第1位-原理第2位-模块第3位-细节版本号修改详细内容说明生效日期修订者审核者V1.0.0初稿2020-3-5Jamie.Xu John.Luo1.概述本应用笔记介绍了如何使用FU68XX MCU中的FOC控制直流无刷电机(BLDC)。
本文介绍了如何使用FU6831应用于硬件FU6831-DDGJ_V1.0电机控制开发板。
FU68XX系列是一款集成8051内核和电机控制引擎(ME)的电机驱动专用芯片,8051内核处理常规事务,ME处理电机实时事务,双核协同工作实现各种高性能电机控制。
其中8051内核大部分指令周期为1T或2T,芯片内部集成有高速运算放大器、比较器、Pre-driver(FU6811除外)、高速ADC、高速乘/除法器、CRC、SPI、I2C、UART、多种TIMER、PWM等功能,内置高压LDO,适用于BLDC/PMSM电机的方波、SVPWM/SPWM、FOC驱动控制。
FU68XX系列现共分为三款芯片:FU6811,FU6831和FU6818。
●FU6811为Gate Driver输出;●FU6831为3P3N Pre-driver输出;●FU6818为6N Pre-driver输出。
foc控制的verilog代码
FOC控制的Verilog代码介绍FOC(Field Oriented Control)是一种用于电机控制的技术,它通过将电机的磁场分解为两个正交的磁场来提高电机的控制性能。
Verilog是一种硬件描述语言,可以用于编写数字逻辑电路的描述和仿真。
本文将介绍如何使用Verilog编写FOC控制算法的代码,并提供一个示例代码来说明其实现方法。
FOC控制原理FOC控制通过将三相交流电机转换为两个正交轴上的直流电机来实现。
这两个轴分别是d轴(直通磁场)和q轴(垂直磁场)。
通过控制d轴和q轴上的电流,可以精确地控制电机的转速和转矩。
FOC算法主要包括以下几个步骤:1.Park变换:将三相交流信号转换为d轴和q轴上的信号。
这可以通过使用Park变换公式来实现。
2.逆Park变换:将d轴和q轴上的信号转换回三相交流信号。
这可以通过使用逆Park变换公式来实现。
3.PI调节器:用于计算校正项以调整d轴和q轴上的电流。
PI调节器根据电流误差和积分误差来计算输出。
4.空间矢量调制:将校正后的d轴和q轴上的电流转换为PWM信号,用于驱动电机。
Verilog代码实现下面是一个使用Verilog编写FOC控制算法的示例代码:module foc_control (input clk,input rst,input [7:0] current_d,input [7:0] current_q,output reg [7:0] pwm_a,output reg [7:0] pwm_b,output reg [7:0] pwm_c);reg [15:0] theta;reg [15:0] sin_theta;reg [15:0] cos_theta;always @(posedge clk) beginif (rst) begintheta <= 16'd0;sin_theta <= 16'd0;cos_theta <= 16'd1;pwm_a <= 8'd0;pwm_b <= 8'd0;pwm_c <= 8'd0;end else begintheta <= theta + 16'h100; // 每个时钟周期增加一个步长,用于控制转速 sin_theta <= sin(theta);cos_theta <= cos(theta);// 计算d轴和q轴上的电流误差,并通过PI调节器计算输出reg [7:0] error_d = target_current_d - current_d;reg [7:0] error_q = target_current_q - current_q;reg [7:0] output_d = pi_controller(error_d);reg [7:0] output_q = pi_controller(error_q);// 将校正后的电流转换为PWM信号pwm_a <= sin_theta * output_d + cos_theta * output_q;pwm_b <= -sin_theta * output_d + cos_theta * output_q;pwm_c <= -output_q;endend// PI调节器模块reg [15:0] integral_error_d;reg [15:0] integral_error_q;function [7:0] pi_controller;input [7:0] error;reg [15:0] integral_error;reg [7:0] output;// 参数设置localparam Kp = 1.0; // 比例系数localparam Ki = 0.1; // 积分系数beginintegral_error <= integral_error + error; // 更新积分误差output = Kp * error + Ki * integral_error; // 计算输出if (output > 255) beginoutput = 255; // 输出限幅,防止过饱和现象发生end else if (output < -255) beginoutput = -255; // 输出限幅,防止过饱和现象发生endreturn output;endendfunctionendmodule示例代码说明上述Verilog代码是一个简化的FOC控制模块。
FOC电流环控制代码分析
FOC电流环控制代码分析
1.电流测量:为了实现FOC电流环控制,首先需要对三相电流进行测量。
通常使用霍尔传感器或电流传感器进行测量。
代码中会涉及到AD转
换和滤波算法,以获得准确的电流测量值。
2.电流控制:在FOC电流环控制中,电流控制器用于控制电流与参考
电流之间的误差。
这通常通过PI调节器实现,其中包括误差计算、积分
运算和比例运算。
代码中会实现PI控制调节器,并将其应用于电流控制
环路中。
3.速度控制:在FOC电流环控制中,速度控制器用于控制电机的速度,并将目标速度转换为电流参考。
通常使用PI调节器对速度进行控制,其
中包括误差计算、积分运算和比例运算。
代码中会实现速度控制器,并将
其与电流控制环路进行耦合。
4.PI调节器:在FOC电流环控制中,PI调节器用于将误差转换为控
制信号。
这通常包括积分运算和比例运算。
代码中会实现PI调节器,并
将其应用于电流和速度控制环路中。
5.空间矢量调制:在FOC电流环控制中,空间矢量调制用于控制逆变器,从而实现对电机相电流的控制。
代码中会实现空间矢量调制算法,并
将其与电流控制环路进行耦合。
总结来说,FOC电流环控制代码的核心是电流测量、电流控制、速度
控制、PI调节器和空间矢量调制。
通过分析和优化这些部分的代码,可
以实现更高效、更精确的FOC电流环控制。
gd32foc控制代码

GD32Foc控制代码的探索与实践GD32Foc是一款高性能、低功耗的微控制器,广泛应用于电机控制、工业自动化等领域。
本文将对GD32Foc控制代码进行深入探讨,以帮助读者更好地理解和使用这款强大的微控制器。
首先,我们需要了解GD32Foc的基本结构和功能。
GD32Foc基于ARM Cortex-M3内核,具有丰富的外设接口和高精度的定时器,为电机控制提供了强大的硬件支持。
同时,GD32Foc还集成了许多电机控制算法,如FOC(Field Oriented Control)算法,可以实现精确的电机转速和位置控制。
接下来,我们将详细解析GD32Foc的控制代码。
在GD32Foc的SDK中,提供了一系列的示例代码,包括基本的GPIO操作、UART通信、ADC采集等。
对于电机控制,SDK中也包含了完整的FOC算法实现。
用户可以根据自己的需求,选择合适的示例代码进行修改和扩展。
在编写GD32Foc的控制代码时,有几点需要注意:1. 熟悉GD32Foc的寄存器映射。
所有的硬件操作都是通过读写相应的寄存器来完成的,因此,理解寄存器的功能和用法是编写控制代码的基础。
2. 理解GD32Foc的中断系统。
GD32Foc支持多种中断源,包括定时器中断、串口中断等。
合理使用中断可以提高系统的实时性和效率。
3. 掌握GD32Foc的电源管理。
为了降低功耗,GD32Foc提供了多种电源管理模式。
在编写控制代码时,需要根据实际需求选择合适的电源管理模式。
总的来说,GD32Foc是一款功能强大、易于使用的微控制器。
通过深入理解其控制代码,我们可以充分发挥其潜力,实现各种复杂的电机控制任务。
杭州领芯微电子永磁同步电机双电阻无感FOC调试手册说明书

电话:+86-571-86972723 传真:+86-571-86972723/ 邮编:310051永磁同步电机双电阻无感FOC调试手册电话:+86-571-86972723 传真:+86-571-86972723/ 邮编:3100511.概述1.1 芯片概述本调试手册介绍了应用LCM32F037 系列MCU的永磁同步电机(PMSM)双电阻矢量控制(FOC)基本原理和调试方法。
LCM32F037是一款32位基于ARM-Cortex-M0内核的高性能控制芯片,最高工作频率可达96 MHz,工作电压为1.8~5.5V;内置32K字节Flash Memory,4K字节SRAM;多达18通道的一个12位精度ADC;最多30个快速I/O端口;可配置6 通道增强型PWM 以及输出死区可控的互补型PWM;内置3个比较器;包含为永磁同步电机FOC控制设计的3个可调增益的运放以及1个反电动势采样电路。
目前已经应用于高速吸尘器、高速出风筒,各类风扇,水泵、油烟机等产品。
◆芯片特性:➢32位ARM Cortex-M0内核MCU;➢内置32K字节FLASH,4K字节SRAM;➢工作电压为1.8~5.5V;最高工作频率96MHz;➢内置高精度上电、掉电复位(POR_PDR);➢内置低压检测电路(LVR),8个低压复位点:1.6V、1.8V、2.0V、2.5V、2.8V、3.0V、3.5V、4.0V;➢可编程电压监测器(LVD),8个电压监测点:2.0V、2.2V、2.4V、2.7V、2.9V、3.1V、3.6V、4.5V;➢内置2个LDO;➢内置4MHz~20MHz的高速晶振(OSCH),以及内置出厂校准过的16MHz RC振荡器(RCH,1%精度);➢内置32KHz的低速晶振(OSCL),以及内置出厂校准过的24KHz RC振荡器(RCL,10%精度);➢内置PLL,最高输出144MHz,抖动小于100ps;➢7个16位定时器;➢1个8位WT定时器;➢内置1个独立看门狗定时器(IWDG)、1个窗口看门狗定时器(WWDG);➢内置1个24位自减型系统时基定时器;➢最多支持30个快速I/O端口;➢5个通信接口(2路UART接口,1路I2C接口,2路SPI通讯口);电话:+86-571-86972723 传真:+86-571-86972723/ 邮编:310051➢内置3个轨到轨的模拟比较器(ACMP);➢内置3个轨到轨的运算放大器(OPA);➢内置2个10位D/A转换器;➢内置18通道的12位精度ADC,最高转换速率为1MSPS;➢内置一个反电动势采样电路(HALL_MID);➢低功耗:休眠、停机、超低功耗停机;在配套的电机控制硬件开发板中,采用LCM2102、LCP2103或LCP7B32A 功率驱动芯片,用于驱动MOSFET。
PMSM控制方式FOC_MTPA_弱磁简介

四、弱磁控制
系统运行在弱磁控制模式时,随着转速升高,电机输出功率恒定不变。只要 电流分控制在电压极限圆和电流极限圆的交集中,就可以形成一个恒定功率的调 速区域。这时 PMSM 的定子电流矢量将沿着电流极限圆向着 d 轴的负方向旋转。 运用不等式来表述恒功率弱磁的前提条件为:
E0、Xd分别是永磁同步电机的反电动势和直轴电抗。电机能够运行在极限大 的转速的条件是 Id=Ilim,也就是说最大去磁电流能够产生的去磁磁通在数值上等 于永磁磁通,可以表达为:
当 PMSM 的转速确定时,d 轴电流可以由下式计算,为
四、弱磁控制
联合下式到转速为
用逆变器输出的极限值来代替上式中的电流和电压量就可以的到理想状态下 的最高转速
谢谢!
二、PMSM的数学模型及FOC控制方式
PMSM的在d-q轴上的数学模型
二、PMSM的数学模型及FOC控制方式
坐标变换 Clark变换
iclark变换
Park变换 iPark变换
二、PMSM的数学模型及FOC控制方式
PMSM矢量控制方法(FOC) 原理 借助于坐标变换,将各变量从三相静止坐标系变 换到跟随转子同步旋转的两相旋转坐标系上,定子电流 矢量按d-q轴被分解id和iq(其中id为励磁电流分量,iq 为转矩电流分量),转矩方程(2)中,通过对id和iq 的控制可以达到控制转矩的目的。
MTPA控制在不影响输出转矩的前提下可以降低电机的铜耗,提高运行效率, 尤其是在汽车启动、加速以及爬坡时降低电驱动系统的实际容量。
三、最大转矩电流比MTPA控制
Id、Iq、Ia的关系为:
id Ia2 iq2
(1)
将式(1)带入扭矩公式,再将Te对iq求导,令导数等于零,可以得到:
foc电流环pid参数

foc电流环pid参数英文回答:The proportional-integral-derivative (PID) controller is a common type of feedback control loop used inindustrial applications. PID controllers are used to regulate the output of a system by comparing the desired output to the actual output and adjusting the input to the system accordingly.The PID controller has three adjustable parameters: the proportional gain (Kp), the integral gain (Ki), and the derivative gain (Kd). The proportional gain determines how much the output of the controller is adjusted in response to an error. The integral gain determines how much the output of the controller is adjusted in response to the integral of the error. The derivative gain determines how much the output of the controller is adjusted in response to the derivative of the error.The PID parameters must be tuned to achieve the desired performance. The tuning process can be complex and time-consuming. However, there are a number of methods that can be used to tune PID controllers.One common method for tuning PID controllers is the Ziegler-Nichols method. The Ziegler-Nichols method is a graphical method that uses the open-loop response of the system to determine the PID parameters.Another common method for tuning PID controllers is the auto-tuning method. Auto-tuning methods use a computer algorithm to automatically tune the PID parameters.The PID controller is a versatile control loop that can be used in a wide variety of applications. By carefully tuning the PID parameters, it is possible to achieve the desired performance.中文回答:PID电流环参数。
矢量控制(FOC)基本原理

矢量控制(FOC)基本原理一、基本概念1.1模型等效原则交流电机三相对称的静止绕组 A 、B 、C ,通以三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势F ,它在空间呈正弦分布,以同步转速ω1〔即电流的角频率〕顺着 A-B-C 的相序旋转。
这样的物理模型如图1-1a 所示。
然而,旋转磁动势并不一定非要三相不可,单相除外,二相、三相、四相…… 等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。
图1图1-1b 中绘出了两相静止绕组α 和 β ,它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势F 。
再看图1-1c 中的两个互相垂直的绕组M 和 T ,通以直流电流M i 和T i ,产生合成磁动势F ,如果让包含两个绕组在内的整个铁心以同步转速旋转,则磁动势F 自然也随之旋转起来,成为旋转磁动势。
把这个旋转磁动势的大小和转速也控制成与图 1-1a 一样,那么这三套绕组就等效了。
三相--两相变换〔3S/2S 变换〕在三相静止绕组A 、B 、C 和两相静止绕组α、β之间的变换,简称3S/2S 变换。
其电流关系为111221022A B C ii i i i αβ⎡⎤⎡⎤--⎢⎥⎡⎤⎢⎥⎢=⎢⎥⎢⎥⎢⎣⎦⎢⎥-⎣⎦⎢⎦⎣() 两相—两相旋转变换〔2S/2R 变换〕同步旋转坐标系中〔M 、T 坐标系中〕轴向电流分量与α、β坐标系中轴向电流分量的转换关系为cos sin 2sin cos M T i i i i αβϕϕϕϕ⎡⎤⎡⎡⎤⎤=⎢⎥⎢⎢⎥⎥-⎦⎣⎦⎣⎣⎦ ()1.2矢量控制简介矢量控制是指“定子三相电流矢量控制〞。
矢量控制理论最早为解决三相异步电机的调速问题而提出。
交流矢量的直流标量化可以使三相异步电机获得和直流电机一样优越的调速性能。
将交流矢量变换为两相直流标量的过程见图2。
图2图2的上图为静止坐标系下的定子三相交流矢量 图2的中图为静止坐标系下的等效两相交流矢量 图2的下图为旋转坐标系下的等效两相直流标量,T i 是转矩电流,M i 是励磁电流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FOC电流环控制:
ADC1_2_IRQHandler (stm32f10x_MC_it.c) ->
TSK_HighFrequencyTask (MCTasks.c) ->
FOC_CurrController ->
|_____ SPD_GetElAngle 得到电角度 (hElAngledpp)
|_____ PWMC_GetPhaseCurrents ,得到相电流Ia和Ib (Iab)
|_____ MCM_Clarke ,clark变换得到Ialpha和Ibeta (Ialphabeta)
|_____ MCM_Park, park变换得到Iq和Id (Iqd)
|_____ PI_Controller执行两次,分别处理Iq和Id, 得到Vq和Vd (Vqd)
|_____ FF_VqdConditioning 前馈条件
|_____ MCM_Rev_Park 反Park变换,根据Vqd和电角度hElAngledpp计算出Valpha和Vbeta (Valphabeta) |_____ PWMC_SetPhaseVoltage (PWMnCurrFdbkClass.c) 根据Valphabeta设置相电压
Clark变换:
MC_Math.c
Curr_Input.qI_Component1 为 Ias, Curr_Input.qI_Component2 为 Ibs
Ialpha = Curr_Output.qI_Component1 = Ias
Ibeta = Curr_Output.qI_Component2 = -(Ias+2Ibs)*divSQRT_3>>15 = -(Ias+2Ibs)/sqrt(3)
右移15位叫做q1.15格式,这是为了方便运算,避免用浮点运算,以降低运算时间。
1/sqrt(3) = 0.57735026918962576450914878050196
(1<<15)/sqrt(3) = 32768*0.57735026918962576450914878050196 = 18918.61362
去掉小数点就是18918 = ox49E6
Park变换:
Curr_Input.qI_Component1 为 Ialpha, Curr_Input.qI_Component2 为 Ibeta , Theta为电角度Iq= Curr_Output.qI_Component1 = Ialpha *cos(Theta)-Ibeta *sin(Theta)
Id= Curr_Output.qI_Component2 = Ialpha *sin(theta)+Ibeta *cos(Theta)
反Park变换:
Volt_Input.qV_Component1 为 Vq, Volt_Input.qV_Componen2 为 Vd , Theta为电角度Valfa = Volt_Output.qV_Component1 =Vq*Cos(Theta)+ Vd*Sin(Theta)
Vbeta = Volt_Output.qV_Component2 =-Vq*Sin(Theta)+ Vd*Cos(Theta)
PWMC_SetPhaseVoltage:
根据Valpha和Vbeta判断在哪个扇区
先将Valfa_beta转成X,Y,Z电压
备注:
#define SQRT3FACTOR (uint16_t) 0xDDB4 /* = (16384 * 根号3 * 2) = (16384 * 1.732051 * 2)*/
pVars->hT_Sqrt3= (pParams->hPWMperiod*SQRT3FACTOR)/16384u = (PWM周期* 16384 * 根号3 * 2)/16384 = PWM周期 * 根号3 * 2);
(2^15
)*4 =
32768*
4 = 13
1072
#define
T (PWM
_PERIO
D * 4)
,这里
有一个
4倍的
放大。
然后电
流采用
了Q15
表示(
左对齐
),2^
15 = 3
2768。
所以最
后计算
需要除
以1310
72。
#define
divSQR
T_3 (int
32_t)0
x49E6 /
* 1/sqrt
(3) in q
1.15 for
mat=0.
577331
5*/
Q15,
也就是
0.5773
315*32
768 =
18918
再根据wX,wY,wZ来决定当前是在什么扇区
参考文档:
以及: STM32F103_永磁同步电机_PMSM_FOC软件库_用户手册_中文版.pdf Vα 和Vβ定子电压
SVPWM 相电压波形
阐明每同步六相空间矢量区域对应的PWM。
定义如下:
空间矢量区域:
通过下式关系分别计算PWM应用于A、B、C三相的正相脉冲宽度持续的时间:
现在考虑PWM波形是中心对称,因此相电压必须集中到周期的50%,根据PWM 输出带负载的值,各自的参考电阻如下:
PWMC_SetPhaseVoltage
|_____ SVPWM变换得到
hCntPhA/B/C, 也就是三相的占空比
|_____
pSetADCSamplingPoint
|_____
R3HD2_SetADCSampPointSect1~6 设置ADC采样位置,然后设置占空比。