海为N16S2T系列PLC控制多动子直线电机设计方案
国产PLC 海为(Haiwell)海为PLC与FUJI-G1S变频器自由通讯应用案例

海为PLC与FUJI-G1S变频器自由通讯设计一、引言用PLC控制变频器已经成为是当今工业自动化系统中最常见的一种组合控制,其控制方法越来越多种多样,其中采用RS-485通讯控制的方案日益得到广泛的应用,其优点是:抗干扰能力强、传输速率高、传输距离远且造价低廉。
但是,RS-485的通讯必须解决的技术问题颇多,一条简单的变频器操作指令,有时要编写数十条PLC梯形图指令才能实现,编程工作量大且繁琐,令设计者头疼。
Haiwell(海为)PLC各种型号的主机都内置Modbus RTU/ASCII协议、自由通讯协议以及海为公司的HaiwellBus高速通讯协议,自带2个通讯口(一个为RS-232,另一个为RS-485),用通讯扩展模块可扩展至5个通讯口,与其它设备建立通讯连接时,无需再加任何附属设备,并且每个通讯口(包括主机自带的两个通讯口或扩展的通讯口)均可用于用于编程和联网。
由于内置有工业上普遍使用的Modbus通讯协议及便利的通讯指令,所以可很方便地与第三方设备建立通讯连接,如:与计算机、文本、触摸屏、变频器、变送器、及其它有通讯功能的仪表等。
即使对于不支持Modbus通讯协议的第三方设备,也可用Haiwell (海为)PLC的自由通讯协议对其进行通讯。
FUJI-G1S变频器既支持Modbus RTU协议也支持富士变频器专用的富士通用变频器协议。
当变频器采用Modbus RTU通讯协议时,海为PLC采用内置的Modbus RTU通讯协议与其通讯;当采用富士通用变频器协议时,海为PLC可采用COMM自由通讯协议与其通讯,非常方便。
以下给出海为PLC采用COMM自由通讯协议与FUJI-G1S变频器的通讯实例。
二、硬件连接与通讯参数的设定海为PLC主机自带标准的RS-485串行接口,可以与多台FUJI-G1S变频器的RS-485通讯端口2(端子台)总线连接,系统硬件组成与连接如图1所示。
~图1 系统硬件接线图根据富士变频器说明书首先设定与通信有关的主要参数,如表1所示:功能代码功能名称设定值设定值含义F01 频率设定1 0 由键盘面板上下键设定(数字设定)H30 链接功能 6 频率设定无效,运行命令有效y11 RS-4851站地址 2 变频器器通信地址y12 发生错误时的动作选择 3 继续运转y13 定时器时间 2.0S 指通信异常时变频器作出反应的时间,y14 传送速度 3 19200bpsy15 数据长度选择0 8位y16 奇偶校验位选择0 无校验y17 停止位选择0 2位停止位y20 协议选择 2 富士通用变频器协议表1 富士变频器通信参数设置表三、通讯程序设计1、富士变频器的通信帧格式。
海为PLC精彩应用案例及使用体会

海为PLC精彩应用案例及使用体会2012年我进入济南某自动化公司,临危受命编写一个矿井跑车防护装置的程序,使用海为PLC,矿井跑车防护装置的工艺如下:图1:工艺示意图如上图所示,在1300米长的矿井井下斜坡巷道上平均安置6道挡车栏,当矿车到达挡车栏附近时挡车栏打开,将矿车放行。
当矿车离开时,将挡车栏放下,从而阻拦上方花落下来的矿车,从而保护巷道。
每个挡车栏有电机一个,上升到位传感器1个,下降到位传感器1个,撞栏传感器1个。
矿车的位置通过安装在提升机附近的编码器获得。
方案难点:①线路多,每个挡车栏光控制信号线不少,再加上巷道布线要尽可能的少,否则影响行车安全以及美观。
②电机多,相应的配置的从站也多。
解决方案:采用分散集中控制的原则图2:方案结构图每个挡车栏的电机,传感器,PLC为一个从站,电机,传感器经从站PLC检测和控制,从站与主站之间采用海为PLC内部的海为BUS通讯方式。
以上方案解决了繁琐的布线方式,而且从站中没有程序,所有的程序均在主站PLC里编写,大大的方面了布线和后期维护。
采用海为PLC进行该方案有两个优点:①海为PLC与海为PLC之间通过海为BUS指令组网方面,如上图方案结构图。
海为PLC与海为PLC之间采用haiwellBus时,只需要在haiwellBus指令表中设置好主站与从站的对应发送与接收寄存器即可,如图3,通讯相当简单方面。
图3:HaiwellBus通讯设置②程序管理方便。
每个从站程序建立一个子程序,如1号从站程序,2号从站程序,另外建议位置与速度检测程序,所有程序在主程序中一块调用,图中右侧。
这样的好处是,编写调试程序的时候可以很方便的找到需要的程序。
其次,维护方便,若从站需要更换PLC,则只需要设置好从站的地址,通讯参数即可,根本不需要再下载程序。
图4:海为PLC的子程序使用采用海为PLC的上述方案经实地验证,效果比采用三菱PLC,AB系列PLC要好,可靠性提高很多。
T6112的plc设计与电器控制
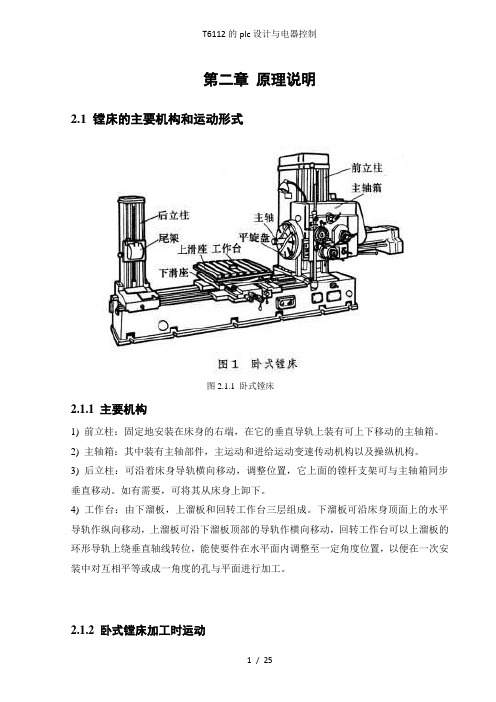
第二章原理说明2.1 镗床的主要机构和运动形式图2.1.1 卧式镗床2.1.1 主要机构1) 前立柱:固定地安装在床身的右端,在它的垂直导轨上装有可上下移动的主轴箱。
2) 主轴箱:其中装有主轴部件,主运动和进给运动变速传动机构以及操纵机构。
3) 后立柱:可沿着床身导轨横向移动,调整位置,它上面的镗杆支架可与主轴箱同步垂直移动。
如有需要,可将其从床身上卸下。
4) 工作台:由下溜板,上溜板和回转工作台三层组成。
下溜板可沿床身顶面上的水平导轨作纵向移动,上溜板可沿下溜板顶部的导轨作横向移动,回转工作台可以上溜板的环形导轨上绕垂直轴线转位,能使要件在水平面内调整至一定角度位置,以便在一次安装中对互相平等或成一角度的孔与平面进行加工。
2.1.2 卧式镗床加工时运动1) 主运动:主轴的旋转与平旋盘的旋转运动。
2) 进给运动:主轴在主轴箱中的进出进给;平旋盘上刀具的径向进给;主轴箱的升降,即垂直进给;工作台的横向和纵向进给。
这些进给运动都可以进行手动或机动。
3) 辅助运动:回转工作台的转动;主轴箱、工作台等的进给运动上的快速调位移动;后立柱的纵向调位移动;尾座的垂直调位移动。
镗床系指主要用镗刀在工件上加工已有预制孔的机床。
通常,镗刀旋转为主运动,镗刀或工件的移动为进给运动。
它主要用于加工高精度孔或一次定位完成多个孔的精加工,此外还可以从事与孔精加工有关的其他加工面的加工。
2.2电力拖动方式和控制要求T6112卧式镗床有持续运动和点动两种方式。
1) T6112卧式镗床采用电阻串入后反接制动。
2) T6112卧式镗床通过液压电磁阀的动作来实现快速移动。
3)主轴、径向刀架、主轴箱和工作态度快速运动使用三相异步电动机拖动。
4)卧式镗床的运动情况比较复杂,控制电路中使用了较多的行程开关。
它们都安装在床身的相应位置上。
主电路有五台电动机。
2.3 主电路分析主电动机通过串入电阻R启动,带动主轴转动,采用反接制动,为减小制动电流而串入电阻。
文献综述-基于PLC的船舶发电机自起动系统设计
文献综述电气工程及其自动化基于PLC的船舶发电机自起动系统设计前言船舶工业的发展,经过“十五”时期的快速发展,中国船舶工业的基础更加扎实,站在了新的历史起点上。
随着世界经济的持续发展,国际经济技术一体化的加快,国际分工的进一步细化,国际间的贸易量进一步的增长,为世界航运市场的发展和繁荣创造了条件,同时也为我国船舶工业的发展创造了条件[1]。
中国的劳动力资源丰富,工业和科研体系健全,产业发展基础良好,有适合造船的漫长海岸线,在资金、技术、人才、管理上具有较好的基础,在发展船舶工业上有较强的比较优势,有广阔的发展空间。
在船舶上船舶的电力系统具有一个极为重要的地位,一个电力系统供电的连续性、可靠性和供电品质,将会直接影响到船舶的经济和技术指标[2]。
一个船舶电力系统主要由电源、配电装置、电力网和用电设备组成。
电源为发电机组和蓄电池组,其中的发电机是由原动机带动的,原动力类型可分为柴油机、汽轮机和蒸汽机等。
配电装置时用来接收、分配和控制发电机发出的电能的。
船上的用电设备有很多,包括了照明负载、动力负载(各种电力拖动机械)、通讯导航设备、生活用电和其他用电设备[3]。
船舶电站又是船舶电力系统的核心,一个船舶电站由原动机、发电机和主配电装置组成,一般每艘船都有其配套的船舶电站,船舶电站的设计是船舶电力系统设计的一个关键环节,根据船舶负荷的供电需求来确定电站的组成方案,并进行电源设备的选型和布置。
在船舶电站的设计中能否正确合理地选择船舶电站机组的容量和台数,将会直接影响到船舶运行的经济指标及技术要求,关系到船舶能否正常安全地航行[4]。
通过对船舶各种运行工况电力负荷的计算,得到全船电力负荷所需总功率,并考虑为保证船舶在江上、海上安全航行需要的后备发电量;维护保养需要的交替容量;船舶今后要添加设备需要的储备容量等因数来确定电站发电机组的总容量及发电机组的数量。
正文1.电站同步发电机并车为了满足船舶供电的可靠性和经济性,一般的船舶电站均装设有两台以上的同步发电机组作为主电源。
Haiwell(海为)PLC选型手册

创新的便利指令集:在分析吸收现有各种 PLC 指令的基础上,Haiwell PLC 推出许多功能强大的创新便利指令。如通讯指令 (COMM、MODR、MODW、HWRD、HWWR)、数据组合分散指令(BUNB、BUNW、WUNW、BDIB、WDIB、WDIW)、PID 控制(PID)、阀门控制(VC)、上下限报警(HAL、LAL)、范围变送(SC)、温度曲线(TTC)等,只需一条指令就能实现其他 PLC 需用多条指令来实现的功能,这些指令十分易于理解和使用,极大地提高了编程效率和程序运行速度。
高速脉冲计数功能:单机支持 8 路 200KHz 双相高速脉冲计数,支持 7 种计数模式(脉冲/方向 1 倍频、脉冲/方向 2 倍频、正/ 反转脉冲 1 倍频、正/反转脉冲 2 倍频、A/B 相脉冲 1 倍频、A/B 相脉冲 2 倍频、A/B 相脉冲 4 倍频)和 3 种比较方式(单段比较、 绝对方式比较、相对方式比较),支持 8 段比较设定值,带自学习功能。
S32S0T S32S2T 16 16 晶体管
S20M0R S20M2R 8
6 继电器
S20M0T S20M2T 8
6 晶体管
S48S0R S48S2R 28 20 继电器
ห้องสมุดไป่ตู้
S48S0T S48S2T 28 20 晶体管
S60S0R S60S2R 36 24 继电器
S60S0T S60S2T 36 24 晶体管
供电
供电
DI
S16S0R S16S2R 8
直线电机的PID控制器设计
基于MATLAB的直线电机PID控制器设计摘要随着现代工业的飞快发展,控制对象日益复杂,对其的性能控制要求也不断提高,致使人们寻找更好的控制方法,其中以改进PID控制最为典型。
PID控制器具有结构简单、容易实现、控制效果好、鲁棒性强等特点,是目前最稳定的控制方法之一。
它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
直线电机是近年来国外积极研究发展的新型电机之一,凭借自身的特性在以直线运动的工业控制中,有比旋转电机巨大的优越性。
可广泛应用于交通运输、起重搬运、物流传输装置、国防及煤矿运输、车床进给等方面,发展前景十分广阔。
传统的比例积分微分( PID) 控制器参数往往因整定不良、性能欠佳,对运行状况的适应性很差。
简单的控制又不能很好地适应对象系统特性变化时的最佳控制要求。
因此,鉴于控制方法目前仍有广泛应用,对参数整定方法的研究将具有很好的应用价值。
本文根据稳定边界法则及Ziegler-Nichol算法,以直线电机控制模型为例介绍如何在MATLAB 工具帮助下整定并验证PID 控制器参数,使参数的整定变得简单、易行,使整定效果更优化。
关键词:直线电机PID控制MATLAB 控制系统参数整定系统仿真Abstract:With the fast development of modern industry, more complicated control object, its performance control requirements improve continuously, cause people looking for better control method, which to improve PID control is the most typical example. The PID (Proportional-Integral-Derivative) control is one of the most common control methods at present. Its structure is simple and easy to implement, however, the control effect is perfect and it has a strong robust characteristics. The physical parameters is, meaning of ,theoretical analysis of system is integrity, and it is familiar by the engineering sector, which in the industrial process control has been widely used.Linear motor is one of the studied new motor. Because of its peculiarity, the linear motor performed better than rotary motor in the control systems when the moving route is linear. Its application range extends widely and widely. And it has been applied in many fields.However, the traditional parameter adaptability of proportion-integral-differential (PID) controller to the operating situation is very bad sometimes because the reduction and performance isn't good. Simple control and can't well adapt to changes in the system characteristics of the object of optimal control requirements. Therefore, in view of the control method is currently there are still widely used, to the study of the method of parameter setting will have a good application value.According to the stable boundary principle and Ziegler-Nichol algorithm, this paper introduces how to reduce and validate the PID controller parameter with the help of MATLAB tool taking the linear motor control model as an example. Making the parameters set becomes simple, easy to operate, and make the setting effect more optimization.Key words:Linear motor,PID control, Matlab, Control system, Parameters setting, System simulation目录基于MATLAB的直线电机PID控制器设计 (I)摘要 (I)关键词: (I)Abstract: ................................................................................................................................. I IKey words: ............................................................................................................................. I I 第一章引言. (1)第二章直线直流电机控制系统 (3)1、直线电机进给系统的研究现状 (3)2、直流直线电机的工作原理 (4)3、直流直线电机数学模型 (6)4、控制方案 (8)第三章PID控制器及MATLAB简介 (9)1、PID控制简介 (9)1)P控制 (9)2)PI控制 (9)3)PD控制 (10)4)PID控制 (10)2、MATLAB简介 (12)第四章控制系统及PID参数整定方法 (15)1、控制系统构成 (15)2、PID参数整定的几种方法概述 (15)2.1.PID参数整定方法 (15)2.2.PID调整方式 (16)第五章直线电机PID控制器的设计 (21)1.Ziegler-Nichols整定方法 (21)2. 稳定边界法则 (22)3.PID参数的整定 (22)4.PID参数的改进 (27)第六章结论与展望 (36)第一章引言随着科学技术的发展和经济水平的提高,人们也逐渐开始追求个性化、自动化的生活,致使控制对象日益复杂,对控制的精度性和可靠性的要求却越来越高。
基于PLC的船舶同步发电机自动准同步并车装置的设计_吕奇伟
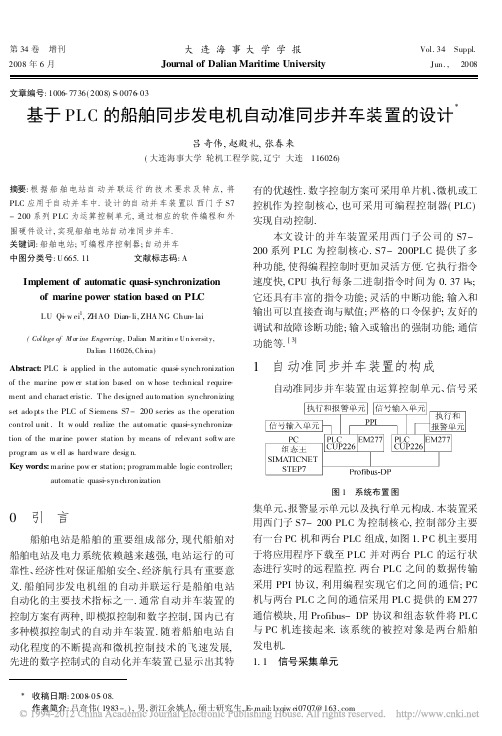
第34卷增刊大连海事大学学报Vol.34Suppl. 2008年6月Journal of Dalian Maritime University Jun.,2008文章编号:1006-7736(2008)S-0076-03基于PLC的船舶同步发电机自动准同步并车装置的设计X吕奇伟,赵殿礼,张春来(大连海事大学轮机工程学院,辽宁大连116026)摘要:根据船舶电站自动并联运行的技术要求及特点,将PLC应用于自动并车中.设计的自动并车装置以西门子S7 -200系列P LC为运算控制单元,通过相应的软件编程和外围硬件设计,实现船舶电站自动准同步并车.关键词:船舶电站;可编程序控制器;自动并车中图分类号:U665.11文献标志码:AImplement of automatic quas-i synchronization of marine power station based on PLCL U Q-i w ei1,ZHAO Dian-li,ZHA NG Chun-lai(College of M ar ine Engeering,Dalian M ariti m e Un i versity,Dalian116026,Ch i na)Abstract:PLC i s applied in the automatic quas-i synchronization of the mar ine pow er stat ion based on w hose technical r equire-ment and charact eristic.T he designed auto mation synchronizing set ado pts the PLC of Siemens S7-200series as the operation control unit.It w ould realize the automatic quas-i synchroniza-tion of the mar ine power station by means of relevant softw are progr am as w ell as hardware desig n.Key words:marine pow er station;programmable logic controller;automatic quas-i synchronization0引言船舶电站是船舶的重要组成部分,现代船舶对船舶电站及电力系统依赖越来越强,电站运行的可靠性、经济性对保证船舶安全、经济航行具有重要意义.船舶同步发电机组的自动并联运行是船舶电站自动化的主要技术指标之一.通常自动并车装置的控制方案有两种,即模拟控制和数字控制,国内已有多种模拟控制式的自动并车装置.随着船舶电站自动化程度的不断提高和微机控制技术的飞速发展,先进的数字控制式的自动化并车装置已显示出其特有的优越性.数字控制方案可采用单片机、微机或工控机作为控制核心,也可采用可编程控制器(PLC)实现自动控制.本文设计的并车装置采用西门子公司的S7-200系列PLC为控制核心.S7-200PLC提供了多种功能,使得编程控制时更加灵活方便.它执行指令速度快,CPU执行每条二进制指令时间为0.37L s;它还具有丰富的指令功能;灵活的中断功能;输入和输出可以直接查询与赋值;严格的口令保护;友好的调试和故障诊断功能;输入或输出的强制功能;通信功能等.[3]1自动准同步并车装置的构成自动准同步并车装置由运算控制单元、信号采图1系统布置图集单元、报警显示单元以及执行单元构成.本装置采用西门子S7-200PLC为控制核心,控制部分主要有一台PC机和两台PLC组成,如图1.PC机主要用于将应用程序下载至PLC并对两台PLC的运行状态进行实时的远程监控.两台PLC之间的数据传输采用PPI协议,利用编程实现它们之间的通信;PC 机与两台PLC之间的通信采用PLC提供的EM277通信模块,用Profibus-DP协议和组态软件将PLC 与PC机连接起来.该系统的被控对象是两台船舶发电机.1.1信号采集单元X收稿日期:2008-05-08.作者简介:吕奇伟(1983-),男,浙江余姚人,硕士研究生,E-mail:lvqiw ei0707@信号采集单元包括电压信号输入电路、频率信号输入电路、脉动电压形成电路.这些电路负责将采集到的电压、频率、相位信号输入到PLC.(1)电压检测 发电机自动并车时,待并机组与运行机组的电压差值一般限制在5%~10%额定电压值范围内,可以使并车时的冲击电流限制在允许的范围内.本控制系统即是以此范围作为压差检测依据.现代船舶同步发电机中采用的调压器可满足发电机运行及并车过程中对电压的需求,因而现代船舶发电机并车控制系统一般可不考虑电压调整这一项.(2)频率检测 规范要求,并车控制系统测算合闸时待并发电机与运行机的频率差不超过0.5Hz ,且待并机的频率应略高于运行机.经计算T s =1/f =1/0.5=2s ,可知系统滑差周期T s 应为2s .本控制系统为了实时测算滑差角频率X s ,提高操作速度、简化硬件,采用了较为简单的波形变换电路,再辅以适当的软件来完成计算,即采用直接比较法检测频差的大小及方向.运行机与待并机电压u x 和u y 的正弦波形经整流限幅及过零检测比较后,转化为方波u x c 和u y c ,将两方波信号u x c 和u y c 送入PLC 直接计数测量频率.把方波信号输入至PLC 所对应的I/O 中断输入口,利用PLC 提供的I/O 边沿中断功能控制高速计数器进行计数.将6kHz 的基准脉冲接至高速计数器的计数口,每一个上升沿启动计数器对基准脉冲进行计数,在被测信号的一个周期内,若计数时钟脉冲数为N ,则被测信号频率为f =f c /N ,其中f c 为基准脉冲信号频率.上述方法适用于低频信号(1H z ~1kH z )的测量,本控制系统需检测的电压频率在50Hz 范围左右,属于低频,因而适合用此方法检测频率.计数器测频的准确度主要由两项误差决定:一项是时基误差,另一项是量化?1误差.当时基误差小于量化?1误差一个或二个数量级时,这时的准确度主要由量化?1误差决定.上述测频法测量的相对误差为Y 1=测量误差值实际误差值@100%=1N@100%为了提高测量值的精度和利于频差比较分辨,可以适当增加被测信号的周期数,采用多周期测频.即在被测信号的M (M 被测信号的周期数,M >1)个周期内,若计数时钟脉冲数为N ,则被测信号频率为f =Mf c /N.其测量相对误差为Y 2=测量误差值实际误差值@100%=|$f x |f x @100%=M N f c -MN +1fcMN f c@100%=1N ?1@100%=1N @100%由此可见,在满足测量速度要求的前提下,适当增加被测脉冲信号的周期数M ,则N 会随之增大,测量精度会在原来的基础上提高.本自动并车控制系统利用PLC 计数测得运行发电机和待并发电机的频率f 1、f 2之后,再进行计算并判断频差的大小是否满足频率条件,若不满足则进一步作出频差方向的判别.(3)相位检测 相位条件的检测是自动并车装置中的关键和难点,本文采用脉动电压来解决相位差检测的问题.本文脉动电压指的是运行机和待并机的频率不一样而差数很小以及电压的数值相等或接近相等时,这两个交流电压之间的差数.脉动电压的形成电路如图2所示图2 脉动电压形成电路用图2所示的电路进行分析,设电网电压为u 2,角频率为X 2;待并发电机电压为u 1,角频率为X 1.电网电压的振幅为U 2m ,待并机电压振幅为U 1m .当U 1m =U 2m =U m 时,u 1-u 2的差值即为脉动电压.式中,X s =X 1-X 2=2P (f 1-f 2)脉动电压的周期和滑差角频率有如下关系:3s =2PX sT s =2P 2P (f 1-f 2)=1$f由此可见,脉动周期和频差成反比,频差越小则脉动周期越长.脉动电压的波形如图3所示,运用脉动电压的概念,待并发电机主开关的动静触头应该在脉动电压为零时闭合,这一条件对应了并车时电压相等、相77增刊 吕奇伟,等:基于PLC 的船舶同步发电机自动准同步并车装置的设计图3脉动电压波形图位一致的两个条件.当脉动周期T s足够长时,即说明频差在允许范围内.例如:并车允许的频率差f s=0.5Hz,相应的脉动周期T s=1/$f=1/0.5=2s,所以只要检测到脉动周期大于2s,即保证频差小于0.5Hz.因此,自动装置只要检测频差周期足够长,并在脉动电压为零时接通发电机主开关,既满足电压、频率、相位这三个条件.1.2运算控制单元本自动并车装置的运算控制模块包括西门子S7-200PLC和模拟量输入输出模块.装置配置的S7-200CPU模块为CPU266,该模块有24点数字输入点以及16点数字输出,可以扩展模块数量为7,内置6个高速计数器,同时备有两个RS-485通信口.模拟量输入模块采用EM235模块,该模块有4路模拟量输入和1路模拟量输出.1.3执行单元和报警显示单元执行单元由伺服电机完成调速功能,通过主开关合闸并网.报警显示部分用于显示频率调节和并车合闸中出现的超频、欠频、电压异常、合闸失败等故障.2软件设计系统的软件设计包括一个主程序和通信指令、电压检测、频率检测和调节、相位检测等子程序.设计思想如下:(1)系统初始化后,先检测电压差,电压差满足要求则进入下一程序,否则延时后报警;(2)检测待并机和运行机的频率差是否在允许的范围内,倘若不在允许范围内,则进行频率调节.(3)检测待并机和运行机的相位差,根据前述脉动电压原理获取准确的合闸时间,并发出合闸指令.整个程序的流程图如图4所示.系统采用KINGVIEW6.5组态软件实现对图4程序流程图PLC的实时监控.该软件为监控PLC的运行提供了十分人性化的界面,它可通过其自带的图形编辑器、报警编辑器、报表编辑器等工具对监控界面或参数进行监视,通过自建的变量将PLC的数据与KINGVIEW6.5的数据相连接.KINGVIEW6.5编程简单,组网通信较易实现,一般可通过工业以太网(SIM AT IC NET)或PROFIBUS-DP实现其与S7 -200之间的通信.本系统采用PROFIBUS-DP协议实现监控台与PLC的连接,这样的连接方式优点是可使数据连续地、实时地进行传输,缺点是传输距离有限.3结语把PLC应用于船舶电站自动并车中,与传统的继电器自动并车装置相比,本装置提高了自动并车的可靠性,操作简单,具有较高的抗干扰能力,便于维护和改进.同时减少大量的中间继电器和时间继电器,PLC的配线比继电器控制系统的配线少得多,故可以省下大量的配线和附件,减少大量的安装接线工时,加上开关柜体积的缩小,可以节省大量的费用.把组态软件应用于本装置,实现了对发电机状态的实时监控.参考文献(References):[1]黄伦坤,朱正德,刘宗德.船舶电站及其自动装置[M].北京:人民交通出版社,1994.[2]杨国豪,朱正鹏,华增芳,等,PL C船舶电站自动并车装置[J].航海技术,2000(5):49-51.[3]廖常初.PL C编程及应用[M].北京:机械工业出版社,2005.[4]王焕文.舰船电力系统及自动装置[M].北京:科学出版社,2004.[5]肖涛,徐致新,徐正喜.船舶主发电机并联运行控制器自动并车功能的实现[J].船电技术,2002(6):15-18.78大连海事大学学报第34卷。
海为N60S2T系列PLC在焊锡机中自动控制设计
海为N60S2T系列PLC在焊锡机中自动控制设计
一、应用背景电子行业的飞速发展,使得高频变压器和高频电感器种类和应用也越来越多,其制作的多工化及高效率化在不断提高,以前机器的已无法满足多工艺及高效率生产的要求。
二、应用需求项目要求能够达到多种产品的兼容,多工艺的自由调节,直焊、侧焊、运动焊多种焊锡方式,并能存储多个档案。
三、解决方案项目主要包扩焊锡机械手,拨锡机构,助焊剂,子锡杯结构。
为了能够使焊锡机实现直焊、运动焊等组合,提高精确焊锡,焊锡机械手的3个运动轴选用伺服马达,以保证焊锡的精度要求;拨锡机构为了能够调节拨锡片下降的深度,选取了步进马达,使其能够在触摸屏上调节高度;为了应对大小不同的产品,配合机械手的焊锡,子锡杯的高低选用一台伺服马达控制,使其能够与机械手配合以适用多种产品多种工艺的需求。
档案数据存储在触摸屏中,各档案可自由调取、存储、删除等。
四、硬件配置
图1 海为PLC N60S2T
图2 设备内部元件
图3 设备全貌
五、软件设计
图4高速脉冲输出程序
图5原点回归程序
图6数据处理程序1
图7数据处理程序2。
六工位组合机床PLC电气控制系统设计毕业设计论文
目录第一部分设计任务与调研 (2)第二部分设计说明 (6)第三部分设计成果 (12)第四部分结束语 (19)第五部分致谢 (20)第六部分参考文献 (21)第一部分设计任务与调研1、毕业设计的主要任务设计一台能完成设计一台能完成装卸、打中心孔、钻孔、倒角、扩孔以及铰孔加工六工位组合机床的PLC电气控制系统。
的PLC电气控制系统。
六工位组合机床完成装卸、打中心孔、钻孔、倒角、扩孔以及铰孔加工。
具体加工过程为:回转工作台上升→在工位Ⅰ拆卸和装夹零件→回转工作台回转到工位Ⅱ下降→工位Ⅱ对零件进行打中心孔→回转工作台上升回转到工位Ⅲ下降→工位Ⅲ钻孔加工→回转工作台上升回转到工位Ⅳ下降→工位Ⅳ倒角加工→回转工作台上升回转到工位Ⅴ下降→工位Ⅴ扩孔加工→回转工作台上升回转到工位Ⅵ下降→工位Ⅵ铰孔加工,如此循环实现对不同零件、不同工位的同步加工。
六工位组合机床完成装卸、打中心孔、钻孔、倒角、扩孔以及铰孔加工。
因为各控制对象所处地理位置比较集中,各个工位之间相隔60°,且相互之间的动存在一定的顺序关系,所以采用集中式控制系统,用一台PLC控制多台设备。
各电动机和工作台的运动在工艺上都应具备必要的配合和联锁。
2、设计的思路、方法与步骤2.1 思路依托电工实训中心和自动化设备维修实训中心的铣床、钻床、镗床、PLC等实训设备,充分运用所学专业知识和实践技能,详细制定设计方案和阶段进度计划,通过程序设计、模拟调试、修订完善,设计出能实现六工位加工系统功能的组合机床PLC电气控制系统。
2.2方法:文献检索、图书馆借阅、手册查询、设备选型、PLC编程、PLC 实训室程序调试。
2.3步骤:分析工艺与控制流程、分析控制要求与方式、分析系统设计的原则和方法、确定PLC输入输出设备和I/O点数及选择PLC机型、硬件系统设计、软件程序设计、绘制控制系统接线图、电器元件的选择、程序调试。
3、本课题相关资料3.1组合机床概述组合机床是机械制造业中的主要加工工具, 因为绝大多数机械零件都是由机床加工而成的。
直线电机保护装置的设计与控制方法
(总第229期)Mar .2014收稿日期:2013-11-19直线电机保护装置的设计与控制方法刘亚奇,郝术壮,朱伟,孟庆嵩(北京中电科电子装备有限公司,北京100176)摘要:直线电机具有精度高、响应快等优点,广泛应用于半导体制造设备中。
直线电机控制机构Z 向运动时,经常出现掉电或故障导致的电机动子跌落而发生损坏晶圆的情况。
利用电磁铁螺线管设计了一种电机掉电保护装置,建立动力学模型,应用Adams 软件进行了动力学仿真,获得了挂钩转角与时间的关系曲线,并通过搭建实验平台,测试了该系统的反应时间。
实验表明,反应时间的仿真与实验结果吻合较好,该装置可以应用于直线电机保护中。
关键词:直线电机;保护装置;Adams 仿真;螺线管中图分类号:TM303 文献标识码:B 文章编号:1004-4507(2014)03-0056-05Design and Control Method of Protection Device forLinear MotorLIU Yaqi ,HAO Shuzhuang ,ZHU Wei ,MENG Qingsong (The 45th Research Institute of CETC ,Beijing ,100176)Abstract:Linear motors have advantages of high precision ,fastly response etc.,so widely used in semiconductor manufacturing equipment. Linear motor control mechanism to move Z direction movement ,often damaged wafers by motor mover falling down or some failures. In this paper ,designed of a power-off protection device using the solenoid electromagnet ,establishment of dynamic model ,application of software Adams to dynamic simulation ,won the curve of hook angle and time ,then built experimental platform to test response time of the system. Experimental results show that the response time of the simulation agree well with the experimental results ,and the device can be applied to the protection of linear motor.Keywords:Linear motor; Protector; Adams Simulation; Solenoid直线电机也称线性电机或线性马达,它可以看做由旋转电机沿径向剖开并展平而成。
PLC毕业课程设计--PLC控制的三台带式电机顺序启停

PLC 课程设计报告课题:PLC控制的三台带式电机顺序启停院系:机电工程系专业:机电一体化班级:10机电2班学号:姓名:指导老师:答辩日期:2012年6月27日一、课程设计的目的1、对所学的PLC知识的综合巩固应用2、巩固练习PLC程序的设计能力3、巩固练习运用组态软件及组态设计4、提高PLC控制系统的安装与调试能力5、提高自学能力二、课程设计的任务图(1)如图(1)带式输送系统输送带上的工件,而带的传动是由与带轮轴相联动的三台电机M1、M2、M3的启停来分别顺序启停控制。
1、设计要求:合理利用PLC硬件和软件的资源相结合,合理布置输入和输出端口,合理应用PLC的各种指令,使程序简单易懂便于维修,且能够完成用PLC的分别控制三台电机M1、M2、M3的启停要求。
运用组态软件进行组态设计,使用组态控制面板分别控制三台电机M1、M2、M3的启停要求。
2、控制要求:带式输送系统由三台带式电动机M1、M2、M3组成,它们分别由继电器KM1、KM2、KM控制着,系统设有总开关SQ1、手动/自动启动开关SQ2,当SQ2处于“ON”位置时为自动启动,自启动的启停时间可以进行设置修改。
每台电机设有启停按钮,供手动启停用。
①自动启动时,先启动M3,经过设置的时间后M2启动,再经过设置的时间后M1启动。
停车时先停M1,经过设置的时间后M2停,再经过设置的时间后M3停。
②手动启动时,要先按M3的启动开关,再按M2的启动开关,最后按M1的启动开关,如果不按顺序启动,电机就无法启动。
停车的顺序正好与启动相反。
三、课程设计的任务分析1、用PLC来实现三台带式电机的顺序启停控制的可行性PLC是存储控制的一种装置,其控制功能是通过存放在存储其内的程序来实现的,若需要对控制要求做修改的话,只需改变内部的程序便可,使硬件软件化,因此它在工业控制中的地位越来越高,它具有以下特点:可靠性高,编程简单易学,通用性强,使用方便,系统设计周期短,对生产改变适应性强,安装简单,调试方便,适应工业环境。
国产PLC-海为PLC在伺服摇摆试验机上的应用

海为PLC -- 在伺服摇摆试验机上的应用作者:张卫鹏注册中华工控网也有N 年了。
也没有什么大的作为,只是闲时写一些PLC 的应用感受,发表在网站的博客中,也算是一种乐趣吧。
承蒙论坛“思南”的厚爱,在QQ 上提醒我“工控产品体验俱乐部活动第一期开始了,去申请体验一下吧”。
点开网页链接,看到不仅可以免费试用,还有中得大奖的机会。
嚯嚯,重奖之下必有勇夫。
就这样开始报名申请PLC 体验——焦急的等待入选名单公布——兴奋的看到入选名单中有本人的名字。
国产PLC 体验之旅就这样在悬念中一步步的开始了。
海为HW-S20ZA220T 型号的PLC 是集开关量、模拟量、脉冲量为一体的性价比高的一款可编程控制器。
根据此体验机型是晶体管输出的特点,可以输出10KHz 的脉冲量,特意用在了我们公司新研发的伺服摇摆试验机上。
根据摇摆试验机的工艺要求,以现有的海为HW-S20ZA220TPLC 为中心,东元伺服为执行机构,还有一些正泰的低压电器,乐清的接近开关为执行检测元件,设计符合我们使用要求的摇摆试验机。
所有控制系统都是国产品牌。
第一步设计原理图。
我用的是AutoCADElectrical 2011 电气专用绘图软件制作电气原理图的。
因为软件中没有国产PLC 的图块,先是根据海为PLC 的接线定制了一个PLC 块。
根据海为PLC 内附带的光盘资料找到接线图,更改ACE 中的一些PLC 块参数。
这样一个完整的国产PLC 图块就完成了(如图1 海为PLCACE 接线图块)。
然后在软件中插入PLC 块即可图出伺服摇摆试验机的原理图了。
刚开始因为没有海为PLC 与伺服驱动器的接线例图,在设计时还犹豫了,担心损坏PLC 或是伺服驱动器。
为了确保图纸无误,让海为的朱工确认了一下。
其实担心是多余的,海为PLC 控制伺服的接线与其他品牌的接线方式是一样一样的。
图1:海为PLC ACE接线图块第二步设计PLC 程序。
根据设备工艺要求和电气原理图来设计PLC 程序。
基于PLC的塔式起重机双电机提升机构控制系统的设计课程设计
设计题目:基于PLC的塔式起重机双电机提升机构控制系统的设计院系:信息工程学院专业:自动化1班姓名:学号:指导老师:完成日期:20 年12 月目录一塔机介绍 (3)二双电机提升机构控制系统的设计 (4)2.1 提升机构介绍 (4)2.2 控制主电路设计 (4)2.3 速度控制 (4)2.4 起升下降控制 (6)2.5 档位控制 (6)2.6 控制电路 (7)2.7 控制主程序 (7)三总结 (11)四参考资料 (12)基于PLC的塔式起重机双电机提升机构控制系统的设计一塔机介绍塔式起重机是一种塔身竖立起重臂回转的起重机械在工业与民用建筑施工中是完成预制构件及其他建筑材料与工具等吊装工作的主要设备。
基本结构图如图1所示。
工作机构主要包括:起升机构、回转机构、小车牵引机构、台车行走驱动机构等;起升机构是塔式起重机中最重要、最基本的机构,是以间歇,重复工作方式,将重物通过其中吊钩或其他吊具悬挂在承载构件(如钢丝绳、链条)上进行起升、下降,或起升与运移的机械设备。
主要安装在塔式起重机的起重臂上。
其主要组成部分有:电机、变速箱、制动器、卷筒、底架、轴承座和安全装置等。
在高层建筑施工中其幅度利用率比其他类型起重机高。
由于塔式起重机能靠近建筑物,其幅度利用率可达全幅度的80%,普通履带式、轮胎式起重机幅度利用率不超过50%,而且随着建筑物高度的增加还会急剧的减少。
因此塔式起重机在高层工业和民用建筑施工的是使用中一直处于领先地位。
应用塔式起重机对于加快施工进度、缩短工期、降低工程造价起着重要的作用。
图1 塔式起重机整体结构图1-固定基础;2-固定支腿;3-附着装置;4-顶升机构;5-下支座;6-上支座;7-回转机构;8-回转塔身;9-司机室;10-变幅机构;11-载重小车;12-吊钩;13-起重臂;14-起重臂拉杆;15-塔顶;16-平衡臂拉杆;17-平衡臂;18-平衡重;19-起升机构;20-电控柜;21-塔身二双电机提升机构控制系统的设计2.1 提升机构介绍起升机构是塔式起重机最重要的传动机构,它要求重载低速,轻载高速,调速范围大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
海为N16S2T系列PLC控制多动子直线电机设计方案
一、应用背景直线电机的产生是用于取代旋转步进或伺服电机+丝杆皮带的传动方式的,由于其直接与负载相连,省去了中间的传动环节,具有更高的响应速度,同时,采用光栅尺等高精度的反馈元件,是高速度与高精度的完美结合。
因为这些优点,直线电机运动控制系统正被广泛应用于自动化领域的各种设备的升级改造,主要应用行业有激光切割、激光打标、半导体行业固晶机、邦定机、自动化流水线物料搬运、多工位协同机械手、轨道交通等。
二、应用需求当前的应用采用三个直线电机动子在同一条定子磁轨上运动,由于传统的丝杆结构不能做得太长,因为较长的丝杆中间容易形变;另外,丝杆上的多个负载只能同时往一个方向运动,而采用直线电机的多动子结构,可以实现多动子间相向或相对运行,在自动化设备上有广泛的应用需求。
因此,特采用海为N16S2T作为控制上位机,配合直线电机三动子实现多工位的工件搬运以及工序作业。
三、解决方案1.采用我司的直线电机驱动器DK05与直线电机连接;
2.海为N16S2T与直线电机驱动器DK05连接;
3.直线电机驱动器DK05参数调试,使直线电机能正常运行;
4.编写PLC程序,使直线电机能在程序控制下运行;
5.完善PLC程序,使三个直线电机动子能同时在程序控制下运行;
四、硬件配置
图1 设备连接
图2 多动子直线电机
五、软件设计
图3 程序截图
六、应用总结1.由于PLC的输出脉冲频率只有200KHz,若采用分辨率为1um/count的光栅尺,运行速度只能达到200mm/s,为了达到更高的速度,可以在驱动器内设置一定的齿。