AVR系列单片机的选型指南
AVR单片机选型指南
AVR单片机选型指南引言:AVR(Advanced Virtual RISC)是由意法半导体(STMicroelectronics)公司开发的一种基于RISC(精简指令集计算机)原理的8位单片机系列,具有高性能、低功耗和强大的功能。
AVR单片机广泛应用于各种嵌入式系统中,如智能家居、工业控制、汽车电子、医疗电子等。
在选择AVR单片机时,需要考虑多个因素,包括性能要求、接口需求、存储容量、功耗、成本等。
本文将介绍AVR单片机的选型指南。
一、性能需求在选型AVR单片机时,首先需要考虑的是性能需求。
性能需求包括处理器速度、存储容量和外设接口等。
处理器速度决定了单片机的处理能力,通常以时钟频率来衡量,常见的频率有8MHz、16MHz等。
存储容量包括Flash(程序存储器)和RAM(数据存储器),一般以字节为单位来衡量。
外设接口包括模拟输入输出(ADC/DAC)、数字输入输出(GPIO)、串口(UART/I2C/SPI)等,根据具体应用需求选择相应的外设接口。
二、功耗需求另一个重要的考虑因素是功耗需求。
AVR单片机以其低功耗的特点而闻名,不论是在待机模式还是在运行模式下,都能有效降低功耗。
对于一些对电池寿命要求较高的应用,如便携式设备,选择低功耗的AVR单片机是一个不错的选择。
三、成本需求成本也是选型时需要考虑的一个因素。
AVR单片机有多个系列,每个系列中有不同的型号,价格也有所不同。
根据项目的预算,可以选择不同价格段的单片机。
一般来说,较低端的单片机价格较低,功能相对较少;而较高端的单片机则价格较高,功能更丰富。
四、开发环境和支持在选择AVR单片机时,还需要考虑开发环境和技术支持。
开发环境包括编译器、调试器和开发板等。
意法半导体公司提供了多种开发工具和支持资源,如Atmel Studio集成开发环境和Atmel START软件框架,可以提高开发效率。
此外,还可以参考开发社区、技术文档和视频教程等,获取更多的技术支持。
AVR、51系列、PIC单片机的对比分析

AVR、51系列、PIC单片机的对比分析摘要:单片机诞生于20世纪70年代末,它是指一个集成在一块芯片上的完整计算机系统。
它包括CPU、内存、内部和外部总线系统。
在AVR、51系列、PIC单片机中,51系列最基本,同时有解密容易等缺点;PIC单片机工业抗干扰性强,各个型号的兼容性强;AVR最新的MEGA 系列运行速度快。
各种单片机都有各自的优缺点,应根据需要选择。
关键词:单片机、AVR、51系列、PIC、性能对比分析一、单片机的概述。
1、单片机的定义。
单片机诞生于20世纪70年代末,它是指一个集成在一块芯片上的完整计算机系统。
单片机具有一个完整计算机所需要的大部分部件:CPU、内存、内部和外部总线系统,目前大部分还会具有外存。
同时集成诸如通讯接口、定时器,实时时钟等外围设备。
2、单片机的发展。
单片机也被称为微控制器(Microcontroller),因为它最早被用于工业控制领域。
单片机由芯片内仅有CPU的专用处理器发展而来。
最早的设计理念是通过将大量外围设备和CPU 集成在一个芯片中,使计算机系统更小,更容易集成进复杂的而对体积要求严格的控制设备当中。
早期的单片机都是8位或4位的。
其中最成功的是INTEL的8031。
此后在8031上发展出了MCS51系列单片机系统。
基于这一系统的单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16位单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,单片机技术得到了巨大的提高。
随着INTEL i960系列特别是后来的ARM系列的广泛应用,32位单片机迅速取代16位单片机的高端地位,并且进入主流市场。
而传统的8位单片机的性能也得到了飞速提高,处理能力比起80年代提高了数百倍。
目前,高端的32位单片机主频已经超过300MHz,性能直追90年代中期的专用处理器,同时性价比非常乐观。
当代单片机系统已经不再只在裸机环境下开发和使用,大量专用的嵌入式操作系统被广泛应用在全系列的单片机上。
MSP430和AVR两种单片机大PK
MSP430和AVR两种单片机大PK
单片机种类有很多,好多厂商都推出了自己的MCU,对于众多品牌的单
片机,我比较看重MSP430 和AVR 系列的,下面就从他们各自的特点,分几
个方面,进行PK 分析。
既然进行PK,如同体育竞赛,要选择相同等级的进行对比,为此,选择
MSP430G2553 和ATMEGA88PA-AU,性能差不多,以此作为比较。
;以下观点,仅代表个人,给初学者作为选型入门参考用。
一。
处理器位数和频率
两种芯片都支持片内振荡器
MSP430G2553 16 位16MHZ 大部分指令系单指令周期
ATMEGA88PA 8 位20MHZ 单指令周期
若按8 位的标准来计算,处理器速度应是8 位的2 倍,这对运算速度是好事。
但在实际中16 位处于一个很尴尬的境地,若与高端的相比,上有32 位,他们
的处理速度和外设均不能比的;一般的低端的又对处理器速度不做太多要求,因
为US 级的反应速度,可以满足大多器件的要求。
点评:
在内核的性能上,430 强些,由于市场目标的定位,两者均能远远满足实际
需要,所以这个指标在对比中,不是很重要。
二。
供电.复位和程序下载
MSP430G2553 供电电压为1.8V-3.6V,复位为低电平复位。
支持4-wire JTAG 和2 线SBW 下载。
超低功耗:运行-- 230μA(在1MHz 频率和2.2V 电压条件下)
待机模式:0.5μA;关闭模式(RAM 保持):0.1μA,具有五种节能模式。
单片机全面介绍(8051,avr,pic,msp430,arm,dsp)

三角波,再与输出比较匹配 寄存器配合,生成占空比可变 、频率可变、相位可变方波 的设计方法(即脉宽调制输出 PWM)”更是令人耳目一新 。
增强性的高速同 /异步串口,具有硬 件产生校验码、硬件检测和校验侦 错、两级 接收缓冲、波特率自动调整定 位(接收时 )、屏蔽数据帧等功能 ,提高了通信的可靠 性,方便程序编写,更便于组成分布式 网络和实现多机通信系统的复杂应 用,串口功 能大大超过 MCS-51/96 单片机的串口,加 之 AVR 单片机高速,中断 服务时间短,故 可实现高波特率通 讯。
VCC:电源+5V 输入 VSS:GND 接地。 AVR 和 pic 都是跟 8051 结构不同的 8 位单片机,因为结构不同,所以汇编指令也有所 不同,而且区别于使用 CISC 指令集的 8051,他们都是 RISC 指令集的,只有几十条指令, 大部分指令都是单指令周期的指令,所以在同样晶振频率下,较 8051 速度要快。另 PIC 的 8 位单片机前几年是世界上出货量最大的单片机,飞思卡尔的单片机紧随其后。 ARM 实际上就是 32 位的单片机,它的内部资源(寄存器和外设功能)较 8051 和 PIC、 AVR 都要多得多,跟计算机的 CPU 芯片很接近了。常用于手机、路由器等等。 DSP 其实也是一种特殊的单片机,它从 8 位到 32 位的都有。它是专门用来计算数字信 号的。在某些公式运算上,它比现行家用计算机的最快的 CPU 还要快。比如说一般 32 位 的 DSP 能在一个指令周期内运算完一个 32 位数乘 32 位数积再加一个 32 位数。应用于某 些对实时处理要求较高的场合。
avr单片机全系列选型指南
AVR MicrocontrollersATMEL® CORPORATIONA VR® Microcontrollers: Product Line ReferenceJanuary 2006 Customer EditionTable of Contents1AVR Product Family (2)1.1P RODUCT S ELECTION G UIDE - TINY AVR® (2)1.2P RODUCT S ELECTION G UIDE - MEGA AVR® (3)1.3P RODUCT S ELECTION G UIDE – PICO P OWER™AVR (4)1.4P RODUCT S ELECTION G UIDE –AVR32 (4)1.5P RODUCT S ELECTION G UIDE – MEGA AVR LCD AND ASSP AVR (5)1.6P RODUCT S ELECTION G UIDE –AVR Z-L INK® (5)1.7P RODUCT S ELECTION G UIDE –A UTOMOTIVE AVR (6)2Application Area in Focus: Comparing power consumption (7)2.1.1AVR BOD vs. TI BOR (7)2.1.2Protection in sleep modes (8)2.2O VERALL POWER CONSUMPTION (8)3AVR Development Tools (9)3.1T OOLS R EFERENCE (9)3.2AVR S TUDIO®T OOLS AND D EVICE S UPPORT (10)4Documentation (12)4.1D ATASHEETS (12)4.2A PPLICATION N OTES (13)2 Application Area in Focus: Comparing power consumptionWritten by: Andreas Eieland, Applications Engineer, System Solutions GroupFigure 1 Atmel picoPower technologyIt is a known fact that there are two main competitors in the ultra low power MCU market. Atmel with the picoPower megaAVRs and Texas Instruments (TI) with the MSP430F2xx series.Lately there has been debate among development engineers, which MCU is the lowest power consumer. In most cases these discussions are based on readouts from datasheets and not real world applications. When using the datasheets to compare parts it is paramount to compare apples to apples to get the numbers right.We will address this and other issues that are important when comparing AVRs to MSP430s in this article. 2.1.1 AVR BOD vs. TI BORMany compare the TI Brown-out reset (BOR) to the AVR Brown-out detect (BOD), based on this they claim that TI have lower power consumption. This is not correct. The TI BOR circuitry is comparable in functionality, power consumption, and protection level to the AVR Power-on-Reset circuitry. The TI BOR and the AVR POR are both considered being “Zero-Power”.To achieve the same level of protection as the AVR BOD, which is present on all picoPower megaAVRs, you have to use the TI Supply Voltage Supervisor (SVS). The SVS is not present on any parts in the ultra low power MSP430F2xx series. It is only available onlarger, more expensive MSP430s. Figure 2: the Atmel picoPower BOD response timeWhen enabled the TI SVS is active in all operating modes. The additional current consumed by the SVS is maximum 15 µA. Though the AVR sleeping BOD has a slightly higher maximum consumption of 20 µA in active mode, power is saved compared to the SVS and other traditional BODs byautomatically disabling the BOD during sleep mode. The BOD is automatically re-enabled when the controller wakes up from sleep mode and is active before the AVR executes any instructions. This approach provides superior protection with substantially less power drain as the majority of the time is normally spent in sleep mode in low power applications – not in active mode.2.1.2Protection in sleep modes.The accuracy of BODs is directly proportional to the current they consume. Low- or zero-power BODs tend to be both slow and inaccurate, while more accurate, faster BODs consume more power. Since BODs usually remain on in sleep mode, they represent a substantial drag on battery life. As a result, most vendors of ultra low power MCUs, sacrifice accuracy and speed to reduce current consumption.In some comparisons it is claimed that the sleeping BOD does not provide sufficient protection in sleep modes since the Brown out detector is turned off. This claim is based on the belief that one cannot predict when a brown out condition occurs. This is not true! In any battery powered system the voltage drops when the current consumption is high. The current consumption is high when the device is in active mode. If the battery voltage drops to below the BOD threshold while the part is in sleep mode, there will be no Flash or EEPROM corruption. The POR is active in all operating modes and will prevent the MCU from performing illegal or undefined operations inside the MCU and on the I/O pins. When the part wakes up, the BOD will trigger immediately if the voltage is to low. This ensures that no code is executed when the system behavior is undefined. With the sleeping BOD the picoPower controllers get the best of both worlds, very good protection while in active mode, and no power consumption penalty in sleep.2.2Overall power consumptionThere is no family of microcontrollers today that will have the lowest power consumption in all possible applications. Power consumption will always be dependent on the suitability of the MCU to the application. We do however claim that the AVR picoPower devices are the market leader in ultra low power technology, as it will give the lowest power consumption in the majority of applications.Comparing total power consumption for an application implemented with different controllers is a complex task. Things one has to take into consideration are energy consumed per instruction, amount of instructions needed to perform the operation, and how long time the application can stay in sleep. Depending on the level of system integration on the MCU, it might be necessary to add extra components to the design. The additional power consumption from these parts must also be added. The MSP430 BOR is an example of this. The BOR has a very slow response time and does not give sufficient protection in many high-speed systems. An external BOD is needed to ensure reliable operation, this adds to the total current consumption. The rule of thumb to reduce power consumption for all MCUs, when not considering external circuitry, is to stay in active mode for the shortest possible time, go to the deepest possible sleep-mode, and stay in the sleep mode for the longest possible time before waking up again. The time spent in active mode is very short for most low-power applications. Hence it is the power consumption in sleep that will make or break the power budget.Figure 3 Average power consumption exampleThe computational performances of the AVR and MSP430 cores are in the same range. For some applications the AVR is better, for other the MSP430 is better. As with power consumption there is no single part, or family of parts, that give the best performance for all applications. The MSP430 is a 16 bit MCU and will be better than the AVR in many applications that use 16 bit arithmetic’s, but the AVR uses fewer cycles in most other applications.AVR MCUs can run up to 25% faster than the MSP430F2xx series. In addition to this the picoPower megaAVRs has lower power consumption than TI in sleep modes and does not require an external BOD. Shorter time in active mode combined with lower power consumption in sleep gives the AVR picoPower devices lower overall power consumption than the MSP430F2xx in most ultra low power applications.Figure 4 Atmel AVR picoPower devicesFor more information about AVR picoPower see: /products/AVR/picopower/3A VR Development ToolsAtmel provides a complete range of development tools for the AVR products.3.1Tools ReferencePart Number DescriptionSoftwareAVR Studio 4.12 Front end software for AVR development toolsStarter KitsSTK500 AVR Starter Kit with AVR Studio InterfaceSTK501 Expansion of STK500 to support 64-pin megaAVR devicesSTK502 Expansion of STK500 for 64-pin LCD AVR devicesSTK503 Expansion of STK500 for 100-pin megaAVR devicesSTK504 Expansion of STK500 for 100-pin LCD AVR devicesSTK505 Expansion of STK500 for 14-pin SOIC and 20-pin PDIP AVR devicesSTK520 Expansion of STK500 for 90PWM devicesSTK525 Starter Kit for AT90USB devicesSTK1000 Starter Kit for AVR32AP7xxx devicesEvaluation Kits90EIT1 AVR Embedded Internet Tool KitAVRBFLY ATmega169 Demo Board with LCD and SpeakerAVRMC100 BLDC Motor Control with AT90PWM3AVRMC200 AC Induction Motor KitAVRMC201 Induction Motor for ATAVRMC200AVRFBKIT DALI Dimmable Fluorescent Ballast KitAVRRTOS AVR Real Time Operating System development kitPart Number Description90USBKEY AVR USB Key Demonstration KitAVRRZ200 Z-Link Demonstration KitAKSTK512-3 RemoteAccessControl – Unidirectional Kit 315 MHzAKSTK512-4 RemoteAccessControl – Unidirectional Kit 434 MHzDevelopment KitsDVK90CAN1 DVK90CAN1 Development Kit for AT90CAN devicesAVRSB100 Smart Battery Development Kit for Atmega406AVRISP2 ISP programmer for all AVR ISP devicesAVRRZ502 Z-Link RF Accessory KitAVRDRAGON Starterkit supporting On-Chip Debugging and programming for AVR. (AVR Dragon will support OCD for all AVRs with 32 kB or less Flash memory and programming for all AVRs. Sesection “AVR Studio Tools and Device Support” for current device support. More devicesupport will be available soon )EmulatorsICE50 AVR In-Circuit Emulator for all megaAVR and new tinyAVR devices.JTAGICE2 JTAGICE mkII On-Chip Debugger supporting all AVR and AVR32 with debugWIRE or JTAG interfaceJTAGPROBE JTAGICE mkII Probe including Flex CablesADAPTEST ICE50 Test AdapterADAPMEGA8 ICE50 Mega8 PDIP personality adapterADAPMEGA32 ICE50Mega8535/16/32PDIP personality adapterADAP128_TOP ICE50 Mega64/128 TQFP personality adapter (top module); requires one AT64PSKT_BOT as the bottom moduleADAP169_TOP ICE50 Mega169 TQFP personality adapter (top module); requires one AT64PSKT_BOT as the bottom moduleADAPMEGA162 ICE50 Mega8515/162 PDIP personality adapterADAPTINY26 ICE50 Tiny26 PDIP personality adapterADAPTINY13 ICE50 Tiny13 PDIP personality adapterADAPT2313 ICE50 Tiny2313 PDIP personality adapterATADAPCAN01 STK500/501 90CAN128 CAN adapterICE50MEM ICE50 memory extension card for mega2560/2561ICE50PROBE ICE40/50 Probe including Flex CablesICE50POD ICE40 and ICE50 POD replacement kit3.2AVR Studio® Tools and Device SupportAVR Studio 4.12 with the latest Service Pack supports all new Atmel debug platforms and devices. Some of the old devices are not supported. See below for a table of currently supported tools and devices in AVR Studio. This support is in progress, and the table below is not guaranteed to be complete when this is read. This information can also be found in the AVR Studio online help and on /avrThe latest AVR Studio SW can be found on: /dyn/products/tools_card.asp?tool_id=2725Device Simulator/AssemblerJTAGICEmkII Starter kitAVRDragonAVR ISPmkIIATtiny11 • STK500ATtiny12 • STK500 •ATtiny13 ••STK500 ••ATtiny15 • STK500 •ATtiny24 ••STK500 + STK505 •ATtiny25 ••STK500 ••ATtiny26 •STK500 (+ STK505) •Device Assembler mkII Starter kit Dragon mkII ATtiny261 ••STK500 (+ STK505) •ATtiny28 • STK500ATtiny44 ••STK500 + STK505 •ATtiny45 ••STK500 ••ATtiny461 ••STK500 (+ STK505) •ATtiny84 ••STK500 + STK505 •ATtiny85 ••STK500 ••ATtiny861 ••STK500 (+ STK505) •ATtiny2313 ••STK500 ••ATmega48 ••STK500 ••ATmega8 • STK500 •(Programmingonly)•ATmega88 ••STK500 ••ATmega8515 • STK500 •ATmega8535 • STK500 •ATmega16 ••STK500 ••ATmega162 ••STK500 •ATmega164P ••STK500 •ATmega165 ••STK500 + STK502 •ATmega165P ••STK500 + STK502 •ATmega168 ••STK500 ••ATmega169 ••STK500 + STK502 •ATmega169P ••STK500 + STK502 •ATmega32 ••STK500 ••ATmega324P ••STK500 •ATmega325 ••STK500 + STK502 •ATmega325P ••STK500 + STK502 ••ATmega3250 ••STK500 + STK504 •ATmega3250P ••STK500 + STK504 ••ATmega329 ••STK500 + STK502 •ATmega329P ••STK500 + STK502 ••ATmega3290 ••STK500 + STK504 •ATmega3290P ••STK500 + STK504 ••ATmega64 ••STK500 +STK501 •ATmega640 ••STK500 + STK503 •ATmega644 ••STK500 •ATmega644P ••STK500 •ATmega645 ••STK500 + STK502 •ATmega6450 ••STK500 + STK504 •ATmega649 ••STK500 + STK502 •ATmega6490 ••STK500 + STK504 •ATmega128 ••STK500 + STK501•(Programmingonly)•ATmega1280 ••STK500 + STK503 •ATmega1281 ••STK500 + STK501 •ATmega2560 ••STK500 + STK503 •ATmega2561 ••STK500 + STK501 •ATmega406 ••AT90CAN32 ••STK500 + STK501 +ATADAPCAN1•AT90CAN64 ••STK500 + STK501 +ATADAPCAN1•Device Assembler mkII Starter kit Dragon mkIIAT90CAN128 ••STK500 + STK501 +ATADAPCAN1•AT90PWM2 ••STK500 + STK520 •AT90PWM3 ••STK500 + STK520 •AT90USB646 ••STK500 + STK525 •AT90USB647 ••STK500 + STK525 •AT90USB1286 ••STK500 + STK525 •AT90USB1287 ••STK500 + STK525 •AT32AP7000 •STK1000AT32AP7001 •STK1000AT32AP7002 •STK10004DocumentationAll documents listed can be downloaded from Atmel Corporation’s web site: underthe product section. For other documentation, please send your request to avr@.4.1DatasheetsThe datasheets of all AVR devices can be downloaded.AVR: /dyn/products/datasheets.asp?family_id=607.AVR32: /dyn/products/datasheets.asp?family_id=682Family Devices LanguagePreliminary Summary Complete LastUpdate Auto AVR ATtiny25/45/85 Automotive English X X 09/2006 Auto AVR ATmega48/88/168 Automotive English X 09/2006 Auto AVR ATmega88 Automotive - 150°CSpecification - Appendix AEnglish X 09/2006 Auto AVR AT90CAN128 Automotive English X X 09/2006 CAN AVR AT90CAN32/64/128 English X X X 11/2006 CAN AVR AT90CAN128 English X X 05/2006 LCD AVR ATmega169(V English X X 07/2006 LCD AVR ATmega169(V) Chinese X X 9/04 LCD AVR ATmega329/3290/649/6490 English X X X 11/2006 USB AVR AT90USB1287/1286/646/647 English X X 02/06 Lighting AVR AT90PWM2, AT90PWM3 English X X 12/2006AVR Z-Link AT86RF230 ZigBee™/IEEE802.15.4-Transceiver English X X06/2006megaAVR ATmega48/88/168 EnglishXXX12/2006 megaAVR ATmega48/88/168 ChineseX X02/05 megaAVR ATmega8(L) English X X10/2006 megaAVR ATmega8(L) Chinese X7/04 megaAVR ATmega8515(L) English X X10/2006 megaAVR ATmega8515(L) Chinese X9/04 megaAVR ATmega8535(L) EnglishX X X10/2006 megaAVR ATmega8535(L) ChineseX X9/04 megaAVR ATmega16(L) English X X10/2006 megaAVR ATmega16(L) Chinese X10/04 megaAVR ATmega162(V) English X X 04/06 megaAVR Atmega164P/324P/644P EnglishX X X10/2006 megaAVR ATmega165(V) English X X X08/2006 megaAVR ATmega32(L) English X X10/2006 megaAVR ATmega32(L) ChineseX X09/04 megaAVR ATmega325/3250/645/6450 English X X X 11/2006Family Devices LanguagePreliminary Summary Complete LastUpdate megaAVR ATmega64(L) English X X10/2006 megaAVR ATmega64(L) ChineseX X09/04megaAVR ATmega640/1280/1281/2560/2561 English X X X09/2006megaAVR ATmega644 EnglishX X X09/2006 megaAVR ATmega128(L) English X X10/2006 megaAVR ATmega128(L) Chinese X05/04 picoPower megaAVR ATmega164P/324P/644P English X X X09/2006 picoPower megaAVR ATmega165P(V) EnglishXXX11/2006 picoPower megaAVR ATmega325P/3250P English X X X 12/2006picoPower LCD megaAVR ATmega169P(V) EnglishXXX11/2006picoPower LCD megaAVR ATmega329P/3290P EnglishXXX12/2006Smart Battery AVR ATmega406 English X X X 07/2006 tinyAVR ATtiny11/12 English XX07/2006 tinyAVR ATtiny13 EnglishXXX10/04 tinyAVR ATtiny13 ChineseX X04/04 tinyAVR ATtiny15L English XX06/05 tinyAVR ATtiny2313 EnglishXXX04/2006 tinyAVR ATtiny2313 ChineseX X07/04 tinyAVR ATtiny24/44/84 EnglishXXX09/2006 tinyAVR ATtiny25/45/85 EnglishXXX12/2006 tinyAVR ATtiny26(L) English XX10/2006 tinyAVR ATtiny26(L) ChineseX X12/03 tinyAVR ATtiny261/461/861 EnglishXXX11/2006 tinyAVR ATtiny28(L)(V) English XX07/2006USB AVR AT90USB1286, AT90USB1287,AT90USB646, AT90USB647 English X X07/2006USB AVR USB DFU Bootloader Datasheet English 04/06 AVR32 AT32AP7000 EnglishXXX10/2006 AVR32 AVR32 Architecture Manual English X X 02/06AVR32 AVR32 Technical ReferenceManual English X X06/2006AVR32 AVR32 Java Technical ReferenceManual English X X10/20064.2Application NotesThe application notes for all AVR devices can be downloaded.AVR: /dyn/products/app_notes.asp?family_id=607AVR32: /dyn/products/app_notes.asp?family_id=682Note Number Description Last Update AVR000 Register and Bit-Name Definitions for the AVR Microcontroller 4/98 AVR001 Conditional Assembly and Portability Macros 3/05 AVR030 Getting Started with IAR Embedded Workbench for Atmel AVR 10/04 AVR031 Getting Started with ImageCraft C for AVR 5/02 AVR032 Linker Command Files for the IAR ICCA90 Compiler 5/02 AVR033 Getting Started with the CodeVision AVR C Compiler 5/02 AVR034 Mixing C and Assembly Code with AVR Embedded Workbench for AVR 4/03 AVR035 Efficient C Coding for AVR 1/04 AVR040 EMC Design Considerations 06/2006 AVR042 AVR Hardware Design Considerations 06/2006 AVR053 Calibration of the Internal RC Oscillator 05/2006Note Number Description Last Update AVR054 Run-time calibration of the internal RC oscillator 02/2006 AVR055 Using a 32kHz XTAL for run-time calibration of the internal RC 02/2006 AVR060 JTAGICE 01/04 Protocol 4/03 AVR061 STK500AVR063 LCD Driver for the STK®504 04/2006 AVR064 STK502 – A Temperature Monitoring System with LCD Output 02/2006 AVR065 LCD Driver for the STK502 02/2006 AVR067 JTAGICE mkII Communication Protocol 04/2006 AVR068 STK500 Communication Protocol 06/2006 AVR069 AVRISP mkII Communication Protocol 02/2006 AVR070 Modifying AT90ICEPRO to Support Emulation of AT90 5/02 AVR072 Accessing 16-bit I/O Registers 5/02 AVR073 Accessing 10- and 16-bit registers in ATtiny261/461/86112/2006 AVR074 Upgrading AT90ICEPRO to ICE10 5/02 AVR080 ATmega103 Replaced by ATmega128 01/04 AVR081 ReplacingAT90S4433 by ATmega8 7/03ATmega161 by ATmega162 01/04 AVR082 ReplacingATmega163 by ATmega16 09/05 AVR083 ReplacingAVR084 ReplacingATmega323 by ATmega32 7/03AT90S8515 by ATmega8515 1/04 AVR085 ReplacingAVR086 ReplacingAT90S8535 by ATmega8535 7/03 AVR087 Migrating between ATmega8515 and ATmega162 7/03 AVR088 Migrating between ATmega8535 and ATmega16 1/04 AVR089 Migrating between ATmega16 and ATmega32 6/03 AVR090 Migrating between ATmega64 and ATmega128 6/03 AVR091 Replacing AT90S2313 by ATtiny2313 10/03 AVR092 Replacing ATtiny11/12 by ATtiny13 10/03 AVR093 Replacing AT90S1200 by ATtiny2313 10/03 ATmega8 by ATmega88 4/05 AVR094 ReplacingAVR095 Migrating between ATmega48, ATmega88 and ATmega168 2/04 AVR096 Migrating from ATmega128 to AT90CAN128 3/04 AVR097 Migration between Atmega128 and ATmega2561 07/2006 AVR098 Migration between ATmega169, ATmega329 and ATmega649 04/2006 AT90S4433 by ATmega48 07/04 AVR099 ReplacingEEPROM 09/05 AVR100 AccessingtheAVR101 High Endurance EEPROM Storage 9/02 AVR102 BlockRoutines 5/02 AVR103 Using the EEPROM Programming Modes 3/05 AVR104 Buffered Interrupt Controlled EEPROM Writes 7/03 AVR105 Power Efficient High Endurance Parameter Storage in Flash Memory 9/03 AVR106 C functions for reading and writing to Flash memory 08/2006 AVR107 Interfacing AVR serial memories 3/05 AVR108 Setup and Use of the LPM Instructions 5/02 AVR109 Self-programming 6/04 AVR120 Characterization and Calibration of the ADC on an AVR 02/2006 AVR121 Enhancing ADC resolution by oversampling 09/05 AVR128 Setup and Use the Analog Comparator 5/02 AVR130 Setup and use the AVR Timers 2/02 AVR131 Using the AVR’s High-speed PWM 9/03 AVR132 Using the Enhanced Watchdog Timer 11/03 AVR133 Long Delay Generation Using the AVR Microcontroller 2/04 AVR134 Real-Time Clock using the Asynchronous Timer 08/2006 AVR135 Using Timer Capture to Measure PWM Duty Cycle 10/2005 AVR136 Low-jitter Multi-channel Software PWM05/06 AVR137 Writing Software Compatible for AT90PWM2/3 and AT90PWM2B/3B12/2006family run-time calibration of the Internal RC oscillator09/2006 AVR140 ATmega48/88/168Note Number Description Last Update AVR151 Setup and use of the SPI 09/05 AVR155 Accessing I2C LCD Display Using the AVR 2-Wire Serial Interface 09/05 AVR180 External Brown-Out Protection 5/02 AVR182 Zero Cross Detector 1/04 AVR191 Anti-Pinch Algorithm for AVR Adaptation Procedure11/2006 AVR200 Multiply and Divide Routines 05/2006 AVR201 Using the AVR Hardware Multiplier 6/02 Arithmetic 5/02 AVR202 16-BitArithmetic 1/03 AVR204 BCDAVR220 BubbleSort 5/02 AVR221 Discrete PID controller 05/2006 AVR222 8-Point Moving Average Filter 5/02 AVR223 Digital Filters with AVR 9/02 Bootloader 4/05 AVR230 DESBootloader 08/2006 AVR231 AESAVR236 CRC Check of Program Memory 5/02 AVR240 4x4 Keypad-Wake Up on Keypress 06/2006 AVR241 Direct driving of LCD display using general I/O 5/04 AVR242 8-bit Microcontroller Multiplexing LED Drive & a 4x4 Keypad 5/02 AVR243 Matrix Keyboard Decoder 1/03 AVR244 UART as ANSI Terminal Interface 11/03 AVR245 Code Lock with 4x4 Keypad and I2C™ LCD 10/2005 AVR270 USB Mouse Demonstration 02/2006Demonstration 02/2006 KeyboardAVR271 USBAVR272 USB CDC Demonstration UART to USB Bridge 04/2006 AVR273 USB Mass Storage Implementation 04/2006 AVR301 C Code for Interfacing AVR® to AT17CXX FPGA Configuration Memory 1/04Gateway 3/05 AVR303 SPI-UARTAVR304 Half Duplex Interrupt Driven Software UART 8/97 AVR305 Half Duplex Compact Software UART 09/05 AVR306 Using the AVR UART in C 7/02 AVR307 Half Duplex UART Using the USI Module 10/03 AVR308 Software LIN Slave 5/02 AVR309 Software Universal Serial Bus (USB) 02/2006 AVR310 Using the USI Module as a I2C Master 9/04 AVR311 Using the TWI Module as a I2C Slave 10/04 AVR312 Using the USI Module as a I2C Slave 09/05 AVR313 Interfacing the PCAT Keyboard 09/05 AVR314 DTMFGenerator 5/02 AVR315 Using the TWI Module as a I2C Master 10/04 AVR316 SMBus Slave Using the TWI Module 10/2005 AVR317 Using the USART on the ATmega48/88/168 as a SPI master 11/04 AVR318 Dallas 1-Wire® Master 10/04 AVR319 Using the USI module for SPI communication 11/04 AVR320 Software SPI Master 09/05 AVR322 LIN v1.3 Protocol Implementation on Atmel AVR Microcontrollers 12/05 AVR323 Interfacing GSM modems02/2006 AVR325 High-Speed Interface to Host EPP Parallel Port 2/02 AVR328 USB Generic HID Implementation 1/06 AVR329 USB Firmware Architecture 02/2006 AVR335 Digital Sound Recorder with AVR and Serial Data Flash 4/05 AVR336 ADPCMDecoder 1/05Utility for AVR 09/05ReceiveAVR350 XmodemCRCAVR360 Step Motor Controller 4/03 AVR400 Low Cost A/D Converter 5/02 AVR401 8-Bit Precision A/D Converter 2/03Note Number Description Last Update AVR410 RC5 IR Remote Control Receiver 5/02 AVR411 Secure Rolling Code Algorithm for Wireless Link04/06 AVR414 User Guide - ATAVRRZ502 - Accessory Kit12/2006 AVR415 RC5 IR Remote Control Transmitter 5/03 AVR433 Power Factor Corrector (PFC) with AT90PWM2 Re-triggable High Speed PSC 03/2006 AVR434 PSC Cookbook 10/2006 AVR435 BLDC/BLAC Motor Control Using a Sinus Modulated PWM Algorithm 09/2006 AVR440 Sensorless Control of Two-Phase Brushless DC Motor 09/05 AVR441 Intelligent BLDC Fan Controller with Temperature Sensor and Serial Interface 9/05 AVR442 PC Fan Control using ATtiny13 9/05 AVR443 Sensor-based control of three phase Brushless DC motor 02/2006 AVR444 Sensorless control of 3-phase brushless DC motors 10/2005 AVR446 Linear speed control of stepper motor06/200606/2006 AVR447 Sinusoidal driving of three-phase permanent magnet motor usingATmega48/88/168AVR448 Control of High Voltage 3-Phase BLDC Motro 05/2006 AVR449 Sinusoidal driving of 3-phase permanent magnet motor using ATtiny261/461/86110/2006 AVR450 Battery Charger for SLA, NiCd, NiMH and Li-ion Batteries 09/2006 AVR452 Sensor-based Control of Three Phase Brushless DC Motors Using CAN128 64 3203/2006 or mega128 64 usiAVR453 Smart Battery Reference Design 02/2006 AVR454 Users Guide – ATAVRSB100 – Smart Battery Development Board 06/2006Server 5/02 WebAVR460 EmbeddedAVR461 Quick Start Guide for the Embedded Internet Toolkit 5/02 AVR462 Reducing the Power Consumption of ATEIT1 3/02 meter 7/04 AVR465 EnergyAVR480 Anti-Pinch System for Electrical Window 12/2006 AVR492 Brushless DC Motor Control using AT90PWM3 7/0507/2006 AVR493 Sensorless Commutation of Brushless DC Motor (BLDC) using AT90PWM3 andATAVRMC10012/05 AVR494 AC Induction Motor Control Using the constant V/f Principle and a Natural PWMAlgorithm02/2006 AVR495 AC Induction Motor Control Using the Constant V/f Principle and a Space-vectorPWM AlgorithmAVR500 Migration between Atmega64 and Atmega645 9/04 AVR501 Replacing ATtiny15 with ATtiny25 3/05 AVR502 Migration between Atmega165 and ATmega325 11/04 AVR503 Replacing AT90S/LS2323 or AT90S/LS2343 with ATtiny25 09/05 AVR504 Migrating from ATtiny26 to ATtiny261/461/861 10/2006 AVR505 Migration between Atmega16/32 and ATmega164/324/644 06/2006Atmega169 to ATmega169P 06/2006 AVR506 MigrationfromAVR507 Migration from ATmega329 to ATmega329P 11/2006ATmega644 to ATmega644P 07/2006 AVR508 MigrationfromAVR509 Migration between ATmega169P and ATmega329P 11/2006 AVR510 Migration between ATmega329/649 and ATmega3290/649007/2006 AVR511 Migration from ATmega3290 to ATmega3290P11/2006 AVR910 In-SystemProgramming 11/00 AVR911 AVR Open-source Programmer 7/0405/2006 AVR914 CAN & UART based Bootloader for AT90CAN32, AT90CAN64, &AT90CAN128AVR32000Introduction to AVR32 header files05/2006 AVR32100 Using the AVR32 USART 4/06 AVR32101 Configuring the AVR32 Interrupt Controller 4/06 AVR32102Using the AVR32 SDRAM Controller05/2006 AVR32105Master and Slave SPI Driver05/2006 AVR32107 Using TWI as a master on the AVR32 4/06Note Number Description Last Update AVR32108Peripheral Direct Memory Access Driver05/2006 AVR32110Using the AVR32 Timer/Counter05/2006 AVR32111Using the AVR32 PIO Controller05/2006 AVR32113Configuration and Use of the Memory Management Unit09/2006© 2007 Atmel Corporation. All Rights Reserved. Atmel®, logo and combinations thereof, Everywhere You Are®,AVR® , Z-Link® and others,are registered trademarks, picoPower™ and others are trademarks of Atmel Corporation or its subsidiaries. Other terms and product names may be trademarks of others.。
AVR单片机入门详细介绍
4. 编程烧入器
编程烧入器也称为程序烧入器或编程器,它的作用是将开 发人员编写生成的嵌入式系统的二进制运行代码下载(写入) 到单片机的程序存储器中。
万用编程器,它不仅可以下载运行代码到多种类型和型号的单 片机中,还可以对EPROM、PAL、GAL等多种器件进行编程。
AVR单片嵌入式系统的软件开发平台
1.汇编语言开发平台
如果你对单片机的内部结构和汇编语言根本不了解,请 先不要用C语言编程。
如果你对单片机的内部结构和汇编语言根本不了解,也 写不出好的单片机的C程序。
二. 单片嵌入式系统的开发软件平台
好的单片嵌入式系统的开发软件通常具备以下几个重要的功能:
单片机系统程序编写和运行代码的生成。(编辑、编译功能) 嵌入式系统开发平台支持用户采用专用汇编程序设计语
采用汇编语言开发系统程序的优点:能够全面和深入的理解 单片机硬件的功能,充分发挥单片机的硬件特性。汇编语言编写 的程序可读性、可移植性和结构性都较差。采用汇编语言编开发 单片机应用系统程序比较麻烦,调试和排错也比较困难,产品开 发周期长,同时要求软件设计人员要具备相当高的能力和经验。
3.高级语言 高级语言是一种“基本”不依赖硬件的程序设计语言。
采用JTAG硬件调试接口进行仿真调试也是实时的在线调 试。不同的是,采用这种方式的调试不需要将芯片取下,用户 得到的运行数据就是芯片本身运行的真实数据,所以这种调试 手段和方式称为实时在片调试(On Chip Debug),并正在替 代传统的实时再板仿真调试(On Board Debug)技术。
AVR 开发工具与入门芯片选择,AVR开发工具选型指南
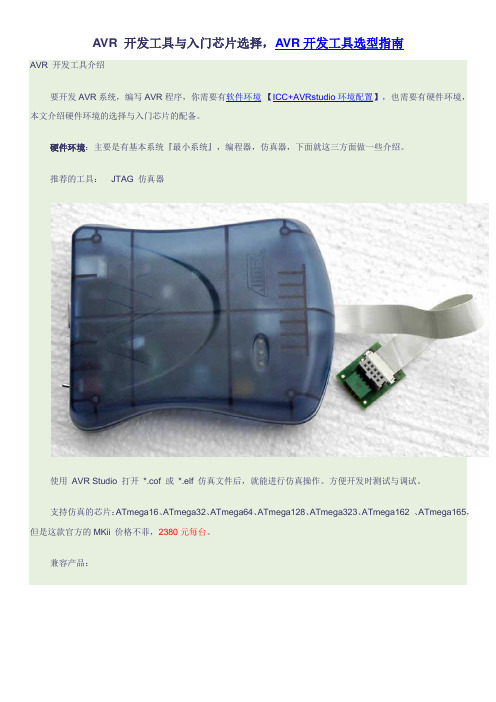
AVR 开发工具与入门芯片选择,AVR开发工具选型指南AVR 开发工具介绍要开发AVR系统,编写AVR程序,你需要有软件环境【ICC+AVRstudio环境配置】,也需要有硬件环境,本文介绍硬件环境的选择与入门芯片的配备。
硬件环境:主要是有基本系统『最小系统』,编程器,仿真器,下面就这三方面做一些介绍。
推荐的工具:JTAG 仿真器使用AVR Studio 打开*.cof 或*.elf 仿真文件后,就能进行仿真操作。
方便开发时测试与调试。
支持仿真的芯片:ATmega16、ATmega32、ATmega64、ATmega128、ATmega323、ATmega162 、ATmega165,但是这款官方的MKii 价格不菲,2380元每台。
兼容产品:推荐原因:1.这是本网站最新开发的功能小板,考虑到了实际中的不同应用场合的需要。
2.本网站的新手入门系列范例,及即将公布的系列应用范例,均以这块小板作为开发板。
3.这块小板集成了以下的功能:(1).采用3v3/5V 电压,两种电压可随意切换。
供电输入电压7.5V-9V,可使用本网站推荐的9V开关电源。
(2).外晶振7.3728M(3).复位电路与按钮(4).集成串行接口,串行口在各种各样的工程中被广泛使用。
(5).ISP接口(6).JTAG接口(7).小板的输出为标准的M16直插封装,小板可以直接插在普通的IC座上,方便实验。
(8).标准的排针孔,我们提供排针(未焊接)。
你也可以做他用,方便可靠。
4.由于上面的M16功能小板已经集成了许多必须的功能,故真正应用时,大家只需要关心应用线路, 故应用PCB板可以做得很简单。
请点击此处查看本网站提供的详细技术资料(包括电路图等)推荐的开发板:增强版AVR开发板,支持Mega16,Mega32,AT90S8535/AVR_ATmega16_ATmega32_AT90S8535.html增强版AVR mega16/32开发板是AVR与虚拟仪器全新开发的一款AVR开发板,适应芯片AT90S8535,ATmega16,ATmega32。
简易AVR单片机教程

简易AVR单片机教程简介AVR单片机是一种低功耗、高性能的微控制器,由Atmel公司开发并广泛应用于嵌入式系统的开发中。
本教程将介绍AVR单片机的基本知识以及编程技巧,帮助初学者快速入门。
目录1.AVR单片机概述2.硬件基础– 2.1 芯片选型– 2.2 电路设计– 2.3 连接方式3.编程环境搭建– 3.1 AVR Studio– 3.2 AVR编程语言– 3.3 编译与烧录4.基本功知识– 4.1 GPIO控制– 4.2 定时器与计数器– 4.3 中断处理5.进阶内容– 5.1 PWM控制– 5.2 串口通信– 5.3 ADC模数转换6.实例项目– 6.1 LED灯控制– 6.2 电机控制– 6.3 温湿度监测1. AVR单片机概述AVR(Alf-Egil Bogen, Vegard Wollan, Ragnar Melland)单片机是Atmel公司推出的一款低功耗高性能的微控制器。
它采用RISC架构,具有较高的运算速度和较低的功耗。
由于其易于学习和使用的特点,AVR单片机被广泛应用于嵌入式系统的开发中。
2. 硬件基础2.1 芯片选型在开始使用AVR单片机之前,我们首先需要选择合适的芯片。
Atmel公司生产了多种型号的AVR单片机,各具特色。
在选择芯片时,我们需要考虑以下几个因素:•项目需求:根据项目的具体需求(如GPIO数量、模拟输入输出等),选择适合的芯片型号。
•价格:芯片的价格也是选择的一个重要因素,需要根据项目的预算进行合理选择。
•开发工具支持:确保选择的芯片在目标开发工具中有良好的支持,以便后期开发和调试。
2.2 电路设计在使用AVR单片机之前,我们还需要进行电路设计。
简单的AVR 单片机电路设计包含以下几个关键组成部分:•电源电路:AVR单片机需要稳定的电源来正常工作。
一般使用电源滤波电容、稳压电路等来提供稳定的电压。
•复位电路:AVR单片机上电时需要复位,复位电路可通过连接一个复位电阻和电容实现。
MSP430和AVR两种单片机大PK
MSP430 和AVR 两种单片机大PK
单片机种类有很多,好多厂商都推出了自己的MCU,对于众多品牌的单片机,我比较看重MSP430 和AVR 系列的,下面就从他们各自的特点,分几个方面,进行PK 分析。
既然进行PK,如同体育竞赛,要选择相同等级的进行对比,为此,选择MSP430G2553 和ATMEGA88PA-AU,性能差不多,以此作为比较。
;以下观点,仅代表个人,给初学者作为选型入门参考用。
一。
处理器位数和频率
两种芯片都支持片内振荡器
MSP430G2553 16 位16MHZ 大部分指令系单指令周期
ATMEGA88PA 8 位20MHZ 单指令周期
若按8 位的标准来计算,处理器速度应是8 位的2 倍,这对运算速度是好事。
但在实际中16 位处于一个很尴尬的境地,若与高端的相比,上有32 位,他们的处理速度和外设均不能比的;一般的低端的又对处理器速度不做太多要求,因为US 级的反应速度,可以满足大多器件的要求。
点评:。
51、AVR、PIC、MSP430、ARM五大单片机对比与详解

51、AVR、PIC、MSP430、ARM五大单片机全解析8051单片微型计算机简称为单片机,又称为微型控制器,是微型计算机的一个重要分支。
单片机是70年代中期发展起来的一种大规模集成电路芯片,是CPU、RAM、ROM、I/O接口和中断系统于同一硅片的器件。
80年代以来,单片机发展迅速,各类新产品不断涌现,出现了许多高性能新型机种,现已逐渐成为工厂自动化和各控制领域的支柱产业之一。
AVR和PIC都是跟8051结构不同的8位单片机,因为结构不同,所以汇编指令也有所不同,而且区别于使用CISC指令集的8051,他们都是RISC指令集的,只有几十条指令,大部分指令都是单指令周期的指令,所以在同样晶振频率下,较8051速度要快。
另PIC的8位单片机前几年是世界上出货量最大的单片机,飞思卡尔的单片机紧随其后。
ARM实际上就是32位的单片机,它的内部资源(寄存器和外设功能)较8051和PIC、AVR都要多得多,跟计算机的CPU芯片很接近了。
常用于手机、路由器等等。
DSP其实也是一种特殊的单片机,它从8位到32位的都有。
它是专门用来计算数字信号的。
在某些公式运算上,它比现行家用计算机的最快的CPU还要快。
比如说一般32位的DSP能在一个指令周期内运算完一个32位数乘32位数积再加一个32位数。
应用于某些对实时处理要求较高的场合。
AVR高可靠性、功能强、高速度、低功耗和低价位指标,也是单片机占领市场、赖以生存的必要条件。
早期单片机主要由于工艺及设计水平不高,一直是衡量单片机性能的重要、功耗高和抗干扰性能差等原因,所以采取稳妥方案:即采用较高的分频系数对时钟分频,使得指令周期长,执行速度慢以后的CMOS单片机虽然采用提高时钟频率和缩小分频系数等措施,但这种状态并未被彻底改观(51以及51兼容)。
此间虽有某些精简指令集单片机(RISC)问世,但依然沿袭对时钟分频的作法。
AVR单片机的推出,彻底打破这种旧设计格局,废除了机器周期,抛弃复杂指令计算机(CISC)追求指令完备的做法;采用精简指令集,以字作为指令长度单位内容丰富的操作数与操作码安排在一字之中(指令集中占大多数的单周期指令都是如此),取指周期短,又可预取指令,实现流水作业,故可高速执行指令。
51、AVR、PIC、MSP430、ARM五大单片机全解析

51、AVR、PIC、MSP430、ARM五大单片机全解析时间:11-27 15:25 阅读:2071次51是最老的8为单片机。
avr包含很多mega64/48/128/256是16位。
dsp是专门处理数据的高速信号处理的芯片。
fpga是内部集成了逻辑电路的芯片。
简介:据统计,我国的单片机年容量已达1-3亿片,且每年以大约16%的速度增长,但相对于世界市场我国的占有率还不到1%。
这说明单片机应用在我国才刚刚起步,有着广阔的前景。
培养单片机应用人才,特别是在工程技术人员中普及单片机知识有着重要的现实意义。
当今单片机厂商琳琅满目,产品性能各异。
针对具体情况,我们应选何种型号呢?首先,我们来弄清两个概念:集中指令集(CI SC)和精简指令集(RISC)。
采用CISC结构的单片机数据线和指令线分时复用,即所谓冯。
诺伊曼结构。
它的指令丰富,功能较强,但取指令和取数据不能同时进行,速度受限,价格亦高。
采用RISC结构的单片机数据线和指令线分离,即所谓哈佛结构。
这使得取指令和取数据可同时进行,且由于一般指令线宽于数据线,使其指令较同类CISC单片机指令包含更多的处理信息,执行效率更高,速度亦更快。
同时,这种单片机指令多为单字节,程序存储器的空间利用率大大提高,有利于实现超小型化。
8051单片微型计算机简称为单片机,又称为微型控制器,是微型计算机的一个重要分支。
单片机是70年代中期发展起来的一种大规模集成电路芯片,是CPU、RAM、ROM、I/O接口和中断系统于同一硅片的器件。
80年代以来,单片机发展迅速,各类新产品不断涌现,出现了许多高性能新型机种,现已逐渐成为工厂自动化和各控制领域的支柱产业之一。
AVR和pic都是跟8051结构不同的8位单片机,因为结构不同,所以汇编指令也有所不同,而且区别于使用CISC指令集的8 051,他们都是RISC指令集的,只有几十条指令,大部分指令都是单指令周期的指令,所以在同样晶振频率下,较8051速度要快。
AVR系列单片机的选型指南
AVR系列单片机的选型指南AVR系列单片机是一种非常流行的嵌入式系统开发平台,由Atmel公司开发。
它们具有高性能、低功耗、易于编程和丰富的外设接口等特点,被广泛应用于各种嵌入式应用中,例如智能家居、汽车电子、工业自动化等领域。
在选择AVR系列单片机时,我们需要考虑以下几个方面:1. 功能需求:首先,需要明确所需的功能需求。
不同的AVR系列单片机具有不同的功能和性能特点,例如不同的处理器速度、内存容量和外设接口数量等。
根据实际需求,选择适合的单片机型号。
如果需要许多外设接口,可以选择较高级的型号,例如ATmega2560系列。
如果只需要基本的功能,可以选择较低级的型号,例如ATmega328P系列。
2.性能要求:其次,需要考虑性能要求。
AVR系列单片机的性能包括处理器速度、存储容量和计算能力等。
根据所需的性能要求,选择适当的处理器速度和内存容量。
如果需要高性能的应用,可以选择较高主频的型号。
如果需要较小和低功耗的应用,可以选择低主频的型号。
3. 开发工具支持:选择一个有良好的开发生态系统和工具链的单片机也是非常重要的。
AVR系列单片机拥有丰富的开发工具和支持资源,例如编译器、调试器、仿真器、烧录器等。
同时,开发人员可以通过Atmel Studio等IDE轻松进行开发和调试。
因此,选择一个广泛支持的单片机型号,将有助于开发过程的顺利进行。
4.供应链可靠性:在选择AVR系列单片机时,还需要考虑其供应链可靠性。
确保所选择的单片机型号在市场上具有较好的供应链支持,以保证后续的量产和维护的可行性。
总结来说,选择AVR系列单片机需要综合考虑功能需求、性能要求、开发工具支持和供应链可靠性等因素。
根据实际需求,并通过与开发工具、支持资源和供应链的比较,选择适合的AVR系列单片机型号,将有助于提高开发效率和项目成功率。
AVR芯片入门知识(包括选型、性能、封装、命名等

AVR芯片入门知识ATmel 挪威设计中心的A先生与V先生,于97年设计出一款使用RISC指令集的8位单片机,起名为AVR。
AVR 芯片的主要特性,及与其它单片机比较的优点,相信我不用多说了,大家随便找一本参考书就可以看到洋洋洒洒的十几页的介绍。
如果你想看到只有一页的介绍,可以参考我们网站上的资料:AVR 单片机性能简介。
我就AVR单片机分3个档次,四种封装做一个介绍。
AVR单片机系列齐全,可适用于各种不同场合的要求。
AVR单片机有3个档次:低档Tiny系列AVR单片机: 主要有Tiny11/12/13/15/26/28等;中档AT90S系列AVR 单片机: 主要有AT90S1200/2313/8515/8535等;(正在淘汰或转型到Mega 中)查看详细情况高档ATmega系列AVR单片机: 主要有ATmega8/16/32/64/128(存储容量为8/16/32/64/128 KB)以及ATmega8515/8535。
新的型号还有ATmega48/88/168 (存储容量为4/8/16K) 等。
如果你想获得最新的AVR芯片资料,可以下载:2006-11 AVR 芯片选型指南,包含所有AVR芯片的参数信息AVR器件引脚从8脚到64脚(新的芯片高达100脚), 还有各种不同封装供选择。
FLASH,RAM 及配置的不同,形成比较宽的产品线系列。
详细的选型信息可以参考本网站的AVR单片机全系列性能参数表。
AVR前几年已经显示了进军中国市场的决心。
几乎所有的AVR主流芯片,都已经有了官方正规翻译的中文DataSheet(数据手册)。
我们网站整理了国内最完整的中文datasheet供大家下载学习:点击打开AVR数据手册下载界面。
虽然我们网站也收录了双龙翻译的一些旧芯片资料,但建议大家不要使用,错误较多,并且严重的偷工减料。
官方翻译的中文手册比较严谨,但仍可能存在一些小缺陷。
有需要时,请参考英文版本:点击打开AVR数据手册下载界面。
avr单片机和stm32区别,avr单片机选型技巧
avr单片机和stm32区别,avr单片机选型技巧单片机的发展相当的迅速,现在各个厂商们也在速度、内存、功能上此起彼伏,竞争激烈,同时涌现出一大批拥有代表性单片机的厂商:Atmel、TI、ST、MicroChip、ARM…国内的宏晶STC单片机也是可圈可点。
最为初学者首先要搞清楚他们之间的区别,掌握avr单片机选型技巧,才能够更好的设计产品。
一:avr单片机和stm32区别-stm32单片机介绍由ST厂商推出的stm32系列单片机,行业的朋友都知道,这是一款性价比超高的系列单片机,应该没有之一,功能及其强大。
其基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M内核,同时具有一流的外设:1μs的双12位ADC,4兆位/秒的UART,18兆位/秒的SPI等等,在功耗和集成度方面也有不俗的表现,当然和MSP430的功耗比起来是稍微逊色的一些,但这并不影响工程师们对它的热捧程度,由于其简单的结构和易用的工具再配合其强大的功能在行业中赫赫有名…其强大的功能主要表现在:特性:1.内核:ARM32位Cortex-M3CPU,最高工作频率72MHz,1.25DMIPS/MHz,单周期乘法和硬件除法2.存储器:片上集成32-512KB的Flash存储器。
6-64KB 的SRAM存储器3.时钟、复位和电源管理:2.0-3.6V的电源供电和I/O 接口的驱动电压。
POR、PDR和可编程的电压探测器(PVD)。
4-16MHz的晶振。
内嵌出厂前调校的8MHz RC振荡电路。
内部40 kHz的RC振荡电路。
用于CPU时钟的PLL。
带校准用于RTC的32kHz的晶振4、调试模式:串行调试(SWD)和JTAG接口。
最多高达112个的快速I/O端口、最多多达11个定时器、最多多达13个通信接口使用最多的器件:stm32F103系列、stm32 L1系列、stm32W系列二:avr单片机和stm32区别-avr单片机介绍avr单片机是Atmel公司推出的较为新颖的单片机,其显著的特点为高性能、高速度、低功耗。
为什么选用AVR单片机

为什么选用A VR单片机?高速嵌入式8位AVR单片机于1997年,由ATMEL挪威设计中心的A先生与V先生,利用ATMEL的Flash新技术,推出全新配的精简指令集单片机,简称AVR3个AVR系列:1、高档AVR单片机ATmegaxxx ( 16KB - 128KB)针对需要大程序容量的复杂应用2、中档AVR单片机A T90Sxxxx ( 1KB- 8KB )针对需要大吞吐量,低功耗和中等程序容量的应用3、低档AVR单片机ATtinyxx ( 1KB - 2KB )针对需要低价格的低端8位MCU市场(1) Flash程序存储器可擦写1000次以上,不再有报废品产生。
PIC有的是OTP,只能烧录一次。
A VR程序存储器数据为16位组织,也可按8位理解。
PIC是12/14位程序存储器,作寄存器转移和算术、逻辑运算带来不便。
(2) 高速度(50ns)、低功耗!硬件应用Harward结构,具有预取指令功能,使得指令可以在一个时钟周期内执行。
PIC要4个时钟周期执行一条指令。
(3) 超功能精简指令!具有32个通用工作寄存器(相当于8051中的32个累加器,克服了单一累加器数据处理造成的瓶颈现象),有128B~4KB个SRAM,可灵活使用指令运算。
(4) 工业级产品!具有大电流(灌电流)10~20mA或40mA(单一输出),可直接驱动SSR或继电器;有看门狗定时器(WDT),安全保护,防止程序走飞,提高产品的抗干扰能力。
(5) 程序写入可以并行写入(用万用编程序器),也可用串行在线ISP擦写。
也就是说不必将IC 拆下拿到万用编程上烧录,而可直接在电路板上进行程序修改、烧录等操作,方便产品升级。
ISP这是今后单片机编程的发展方向。
(6) A VR的I/O口是真正的I/O口,能正确反映I/O口的真实情况。
I/O口有输入/输出, 三态高阻输入,也可设定内部拉高电阻作输入端的功能,便于作各种应用特性所需(多功能I/O口)(7) 高度保密(LOCK)!不可破解的Lock bit技术不象Mask ROM那样可通过电子显微镜破解Flash单元深藏于芯片内部可多次烧写的Flash且具有多重密码保护锁死(LOCK)功能,因此可快速完成产品商品化,并可多次更改程序(产品升级)而不必浪费IC或电路板,大大提高产品质量及竞争力。
单片机选型

各种封装形式见图
抗干扰性能、保密性
用单片机要选择抗干扰性能好的,特别是用在 干扰比较大的工业环境中的尤应如此。单片 机加密后的保密性能也要好,这样可保证你 的知识产权不容易被侵犯
其他方面
在单片机的性能上还有很多要考虑的因素,比 如中断源的数量和优先级、工作温度范围、 有没有低电压检测功能、单片机内部有无时 钟振荡器、有无上电复位功能等等
I / O( 输入/输出 ) 口
I/ O 口的数量和功能是选用单片机时首先要考虑的问题之 一,要根据实际需要确定 I / O 口的数量, I / O 口多 余不仅芯片的体积增大,也增加了成本。 选用时还要考虑 I / O 口的驱动能力,驱动电流大的单片 机可以简化外围电路。 51 等系列的单片机下拉 ( 输出低 电平 ) 时驱动电流大,但上拉 ( 输出高电平 ) 时驱动电 流很小。而 PIC 和 AVR 系列的单片机每个 I / O 口都可 以设置方向,当输出口使用时以推挽驱动的方式输出高、低 电平,驱动能力强,也使得 I / O 口资源灵活、功能强大、 可充分利用。当然我们也可以根据 I / O 口的功能来设计 外围电路,例如用 51 单片机驱动数码管,我们选用共阳的 数码管就能发挥其输出口下拉驱动电流大的特点
封装形式
单片机常见的封装形式有: DIP( 双列直插式 封装 ) 、 PLCC(PLCC 要对应插座 ) 、 QFP( 四侧引脚扁平封装 ) 、 SOP( 双列小 外形贴片封装 ) 等。做实验时一般选用: DIP 封装的,如果选用其它封装,用编程器 编程时还配专用的适配器。如果对系统的体 积有要求,如遥控器中用的单片机,往往选 用 QFP 和 SOP 封装的
工作电压、功耗
单片机的工作电压最低可以达到 1 . 8V ,最高为 6V ,常用的单片机工作电压为 4 . 5V ~ 5 . 5V ,低电压系列2 . 7V ~ 5 . 0V 或 2 . 4V ~ 3 . 6V 。选用时根据供电方式确定。 单片机的功耗参数主要是指正常模式、空闲模式、 掉电模式下的工作电流,用电池供电的系统要选用 电流小的产品,同时要考虑是否要用到单片机的掉 电模式,如果要用的话必须选择有相应功能的单片 机
AVR单片机杂谈

本人原来使用过的芯片有:AT89C51、2051、PIC16C711、16F84、LPC76X、ADuC812/834 但是看到AVR以后觉得AVR有不少优点:1.带10位A/D,一般满足工业控制的基本要求;2.带FLASH和EEPROM,特别是EEPROM,可以放逻辑炸弹,防止某些人用上了不付钱;3.引脚少,没有外扩总线,抗干扰性能还可以;4.开发容易,开发硬件成本低(我现在采用的是汇编语言,我不用C语言,C语言对于高速实时控制太慢了),采用汇编语言来说,写一个比较复杂的控制程序(比如大功率焊接设备SCR调压器控制器),连键显、PID、触发和保护一起,4K*16位足够了,就算开发很复杂的工控系统,16K*8位的ATmega16都绰绰有余,关键在于你的编程水平够不够;5.加密性能比较好;6.价格便宜,对于大功率工业控制的设备而言(至少1万元以上的),那点成本根本不算什么;7.原来想采用uPD7810或者68HC11A8,开发系统的价格实在太高了,受不了,而且没有几天工夫你根本不可能使用它的。
所以,现在我还在用51,主要是软件仿真和专用仿真器一起上,AVR我用软件仿真,因为JTAG口实在太占用资源,而且修改程序不如ISP来得快捷方便。
AVR就是我现在想要的片子,基本功能全都有了,没有外部总线,被别人破解的可能性也远远比51小,PIC我实在看不惯它的分页,实在太讨厌了,AVR的工作温度范围也能很好满足我的工业控制要求,所以,现在在继续搞51的同时,学习AVR。
DSP对于真正的工业控制来说,除了空间矢量变换和复杂的信号解算,其余根本就是无用的东西,还浪费钱钱和国家资源:)而且加工不容易,量不大根本划不来,所以我不用320LF3407/2812、ARM等等。
看一种芯片是否有用,我认为主要看以下几点:1.能不能满足市场对你的产品的要求;2.成本比较低;3.开发费用低;包括硬件成本和软件成本;4.印刷板设计容易;5.加密性能优良;6.有一定的升级余地;7.可以放逻辑炸弹(没办法,适合中国这种“欠钱的是老子,讨债的是孙子”国情);8.引脚驱动能力大,可以尽量少的外扩器件;9.开发语言可以很容易加入软件抗干扰,而且占用的代码资源少;10.工作温度范围宽,电源适应能力强。
51,PIC,AVR单片机的对比
51,PIC,AVR单片机的对比1. 传统51传统51,我想我就不多说了,适合菜鸟入门,容易上手,价格一般(从性价比方面说)。
缺点:解密容易(传统51说:谁让咱出道早呢,大家都研究我,哎!哭......)一般功能也有,, 但AD、eeprom等功能要靠扩展,增加硬件和软件负担。
IDE环境推荐 keil。
2. PICPIC的好处就是各个型号的兼容性强,学好了PIC16f877a,16系列的就OK了,别的型号要用的时候拿出2分钟看看数据手册就行了。
12系列,16系列,18系列也是充分的向下兼容。
功能全,型号多,适于选型分析,抗干扰能力强缺点:解密容易(pic说:我出道也很早啊,人家也研究我不少年了,我和奥尼尔是英雄相惜啊!),单片机价格贵(从性价比方面说)。
IDE环境:推荐picc+mplab3. avr mega系列avr mega系列:价格较便宜(从性价比方面说),硬件结构适合C语言编程,功能齐全,不容易解密。
抗干扰能力强。
型号之间兼容性一般。
应该说是比较满意的片子了。
缺点:功能寄存器多,不适合初学者----通过个人努力此缺点就不是缺点了--各位加油!IDE环境:CVAVR+Studio 其实icc 、gcc也不错,大家自己斟酌,呵呵。
4. STC 51系列STC 51系列,我就是学这款单片机入门的。
价格便宜,性价比高,功能多,抗干扰能力最强,eeprom大,串口编程很方便(无论是对于初学者还是产品开发调试),出厂时程序引导区就已经加密,并且STC解密的市面价格在1.5w到2.5w之间,可见解密难度大,在一定程度上保护了单片机工程师的利益和产品开发商的利益。
生产时就已经考虑到与传统51的兼容问题,兼容做的很好,又增加了许多功能,软复位功能我比较喜欢。
缺点:资料就是产品公司(宏晶)网上的资料,资料少,不适合初学者---我指学习它自己增加的功能。
(这个缺点也不是什么缺点,产品公司的资料也很详细,但我不能说STC没缺点吧,其它单片机都有,要是STC我说没有或者不说,太偏向了吧,呵呵)IDE:keil 。
avr
JTAG仿真器使用 AVR Studio打开 *.cof或 *.elf仿真文件后,就能进行仿真操作。方便开发时测试与调试。
支持仿真的芯片:ATmega16、ATmega32、ATmega64、ATmega128、ATmega323、ATmega162、ATmega165
入门级芯片
ATTiny1616
推荐原因:
目前最新的性价比最高的AVR芯片,零售价不到0.5美金,内置16KFlash,除了传统串行外设,还集成PTC触 摸控制器和5位DAC。可满足从消费类,工业级,甚至汽车级别的各类应用。封装小巧,支持udpi仿真。 ATtiny1616的超低功耗设计,使得在运行触摸应用时,能达到不超过20uA的平均功耗。
avr
单片机类型
01 产品特点
03 开发工具 05 入门级芯片
目录
02 与众不同 04 热门开发
通常来讲,AVR单片机指的是1997年由ATMEL公司研发出的增强型内置Flash的RISC(Reduced Instruction Set Computer)精简指令集高速8位单片机。AVR的单片机可以广泛应用于计算机外部设备、工业实时控制、仪器 仪表、通讯设备、家用电器等各个领域。但AVR的诞生颇有传奇色彩,1992年Alf-Egil Bogen和Vegard Wollan 在瑞典理工学院的毕业论文中提到了一种使用闪存程序存储器的,使用RISC指令集的微控制器。在接下来的几年 里, Alf-Egil和Vegard不断完善设计,并加入一些集成外设,1997年,加入Atmel公司挪威设计中心的A先生和 V先生,利用Atmel公司的Flash新技术,共同研发出RISC精简指令集高速8位单片机,简称AVR。随着2016年, Atmel被Microchip收购,AVR随即成为Microchip的主力8位单片机产品之一。
AVR单片机基础知识
AVR单片机基础知识AVR单片机的特点:单片机按CPU的处理能力分类目前有4位、8位、16位、32位,位数越高的单片机在数据处理能力和指令系统方面就越强,AVR、51、PIC都属于8位机。
8位单片机也是目前应用最广泛的单片机,在各个领域上都可以看到它的身影。
AVR单片机是1997年由ATMEL公司研制开发的一种新型的8位单片机,AVR单片机分抵挡的ATtiny系列、中档的AT90S系列、高档的ATmega系列,本站推荐初学者选择学习的芯片型号是ATmega48/88/168或者ATmega16;不推荐使用中档的AT90S系列,因为它们都是比较早期的产品,现在它们早已经停产了。
AVR单片机全部型号(个别老型号除外)都支持ISP在线编程(烧写)、芯片可以反复擦写,这样学习AVR就变得非常的方便,设计者可以通过下载线直接在目标电路板上对芯片进行编程、调试,而不需要把芯片放在专用的编程器或者仿真器上烧写与调试。
51单片机也有一部分型号支持ISP在线编程,如AT89S51、AT89S52等。
PIC单片机也是部分支持ISP,但是它有很多型号是OPT 一次性烧写的,这些的确为难了广大初学者。
<二> AVR与51、PIC单片机相比具有一系列的优点,用通俗的说法主要体现在这几个方面:1、在相同的系统时钟下AVR运行速度最快;2、所有AVR单片机的FLASH、EEPROM蓄存器都可以反复烧写、支持在ISP在线编程(烧写),入门费用非常少;3、片内集成多种频率的RC振荡器、上电自动复位、看门狗、启动延时等功能,使得电路设计变得非常简单;4、每个IO口作输出时都可以输出很强的高、低电平,作输入时IO口可以是高阻抗或者带上拉电阻;5、片内具有丰富实用的资源,如AD模数器、DA数模器,丰富的中断源、SPI、USART、TWI通信口、PWM等等;6、片内采用了先进的数据加密技术,大大的提高了破解的难度;7、片内FLASH空间大、品种多,引脚少的有8脚,多的有64脚等各种封装8、部分芯片的引脚兼容51系列,代换容易,如ATtiny2313兼容AT89C2051,ATmega8515/162兼容AT89S51等<三> 开发AVR单片机的基本条件:1:下载线(烧写器/编程器)一个,常见的有“并口AVRISP下载线”和“AVRISP/STK500下载线”;2:下载线的控制软件一套;3:编译程序代码的开发软件一套(可以用C语言,也可以用汇编语言);4:试验板一块;5: 电脑一台。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 AVR Development Tools ........................................................................................... 5
20 M/P/S now
S 2.7-5.5 0-20
20 M/P/S now
S 1.8-5.5 0-10
14 X, 20 M Dec.05
S 2.7-5.5 0-20
14 X, 20 M Dec.05
S 1.8-5.5 0-10
8 P/S, 20 M May.06
S 2.7-5.5 0-20
Байду номын сангаас
8 P/S, 20 M May.06
Page 1
July 2005
1 AVR Product Family
1.1 Product Selection Guide 1.1.1 Low Pin-Count Devices
AVR Flash Microcontroller
FLASH (KB) EEPROM(Bytes) RAM(Bytes) I/O Pins SPI UART TWI USI* Hardware Multiplier PWM 8-bit Timer 16-bit Timer 10-bit A/D Channels JTAG Interface debugWIRE LCD Interface CAN Interface In System Prog. (I) + Self-Prog.(S) Vcc(V) Clock speed(MHz) Packages (Pin) Production
S 1.8-5.5 0-10
8 P/S, 20 M Dec.05
S 2.7-5.5 0-20
8 P/S, 20 M Dec.05
S 1.8-5.5 0-10 28 P, 32 A/M now
S 2.7-5.5 0-20 28 P, 32 A/M now
S 2.7-5.5 0-8 28 P, 32 A/M now
2.1 TOOL REFERENCE ........................................................................................................................... 5 2.2 AVR STUDIO 4.11 TOOLS AND DEVICES SUPPORT ......................................................................... 6 2.3 TOOLS SELECTION GUIDE ............................................................................................................... 7
- 2.7-5.5 0-2
8 P/S now
- 4.5-5.5 0-6
8 P/S now
I 1.8-5.5 0-1
8 P/S now
I 2.7-5.5 0-4
8 P/S now
I 4.5-5.5 0-8
8 P/S now
S 1.8-5.5 0-10 8 P/S/SS, 20 M now
S 2.7-5.5 0-20 8 P/S/SS, 20 M now
1.1 PRODUCT SELECTION GUIDE ........................................................................................................... 2 1.1.1 Low Pin-Count Devices.......................................................................................................... 2 1.1.2 Higher Pin-Count Devices...................................................................................................... 3
mega168V 16 512 1K 23 2 1 1 - Y 6 2 1 8 - Y - -
mega168
16 512 1K 23 2 1 1 - Y 6 2 1 8 - Y - -
tiny11L tiny11 tiny12V tiny12L tiny12 tiny13V tiny13 tiny15L tiny26L tiny26 tiny28V tiny28L tiny2313V tiny2313 tiny24V tiny24 tiny25V tiny25 tiny45V tiny45 mega48V mega48 mega8L mega8 mega88V mega88 mega8515L mega8515 mega8535L mega8535 PWM2 PWM3
Note:
USI can be configured to SPI, UART or TWI.
Note:
Fully Green Option is available.
Page 2
July 2005
1.1.2 Higher Pin-Count Devices
AVR Flash Microcontroller
I 2.7-5.5 1.6
8 P/S now
I 2.7-5.5 0-8 20 P/S, 32 M now
I 4.5-5.5 0-16 20 P/S, 32 M now
- 1.8-5.5 0-1 28 P, 32 A/M now
- 2.7-5.5 0-4 28 P, 32 A/M now
S 1.8-5.5 0-10
S 4.5-5.5 0-16 28 P, 32 A/M now
S 1.8-5.5 0-10 28 P, 32 A/M now
S 2.7-5.5 0-20 28 P, 32 A/M now
S 2.7-5.5 0-8 40 P, 44 A/J/M now
S 4.5-5.5 0-16 40 P, 44 A/J/M now
S 2.7-5.5 0-8 40 P, 44 A/J/M now
S 4.5-5.5 0-16 40 P, 44 A/J/M now
S 2.7-5.5 0-16
24 S Nov.05
S 2.7-5.5 0-16
32 M/S Nov.05
Package Options: A=TQFP; J=PLCC; M=QFN/MLF; P=PDIP; S=SOIC; X=TSSOP
3 Documentation............................................................................................................ 8
3.1 DATA SHEET ................................................................................................................................... 8 3.2 APPLICATION NOTES ....................................................................................................................... 8
FLASH (KB) EEPROM(Bytes) RAM(Bytes) I/O Pins SPI UART/USART TWI USI* Hardware Multiplier PWM 8-bit Timer 16-bit Timer A/D Channels JTAG Interface debugWIRE LCD Interface CAN Interface In System Prog. (I) + Self-Prog.(S) Vcc(V) Clock speed(MHz) Packages (Pin) Production
1 - - 6 - - - - - - 1- - ---1 - - 6 - - - - - - 1- - ---1 64 - 6 - - - - - - 1 - - - - - 1 64 - 6 - - - - - - 1 - - - - - 1 64 - 6 - - - - - - 1 - - - - - 1 64 64 6 - - - - - 2 1 - 4 - Y - 1 64 64 6 - - - - - 2 1 - 4 - Y - 1 64 - 6 - - - - - 1 2 - 4 - - - 2 128 128 16 - - - 1 - 2 2 - 11 - - - 2 128 128 16 - - - 1 - 2 2 - 11 - - - 2 - - 20 - - - - - - 1 - - - - - 2 - - 20 - - - - - - 1 - - - - - 2 128 128 18 - 1 - 1 - 4 1 1 - - Y - 2 128 128 18 - 1 - 1 - 4 1 1 - - Y - 2 128 128 12 - - - 1 - 2 2 - 8 - Y - 2 128 128 12 - - - 1 - 2 2 - 8 - Y - 2 128 128 6 - - - 1 - 2 1 - 6 - Y - 2 128 128 6 - - - 1 - 2 1 - 6 - Y - 4 256 256 6 - - - 1 - 2 1 - 6 - Y - 4 256 256 6 - - - 1 - 2 1 - 6 - Y - 4 256 512 23 2 1 1 - Y 6 2 1 8 - Y - 4 256 512 23 2 1 1 - Y 6 2 1 8 - Y - 8 512 1K 23 1 1 1 - Y 3 2 1 8 - - - 8 512 1K 23 1 1 1 - Y 3 2 1 8 - - - 8 512 1K 23 2 1 1 - Y 6 2 1 8 - Y - 8 512 1K 23 2 1 1 - Y 6 2 1 8 - Y - 8 512 512 35 1 1 - - Y 3 1 1 - - - - 8 512 512 35 1 1 - - Y 3 1 1 - - - - 8 512 512 32 1 1 1 - Y 4 2 1 8 - - - 8 512 512 32 1 1 1 - Y 4 2 1 8 - - - 8 512 512 19 1 1 - - Y 2 1 1 8 - Y - 8 512 512 27 1 1 - - Y 3 1 1 11 - Y - -