单片机测相位11
单片机相位测量仪
断 并 分 别进 行处 理 和 计 算 。 图 3 主 程 序 流 程 图 图 4 中断 暇 务 程 序 流 程 图
结语
9 88 该 系 统 电路 结 构 简 单 ,可 靠 性 强 , 显 示稳 定 ,测 量 空 航 天 大 学 出 版 社 , 1 9 . .
Hale Waihona Puke 精 度 高 , 辨 率 可 达 0 3 。 , A以 下 的 负 载 电流 可 直 接 分 . 6 5 0
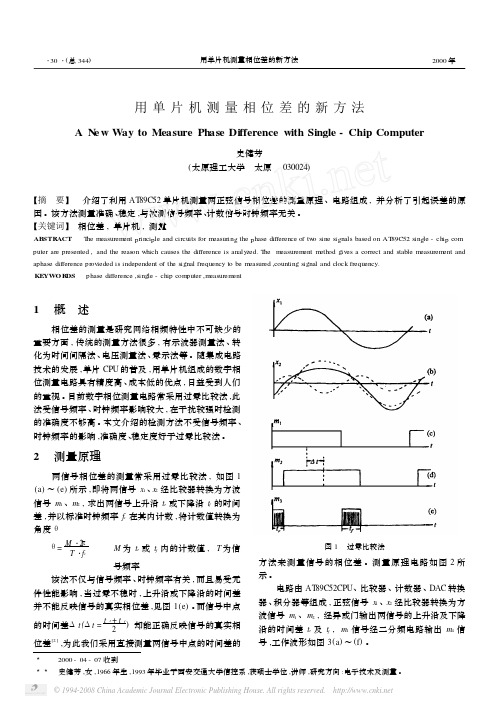
在 T 内允 许 时 钟 脉 冲 计 数 ,则形 成 相 位 差 中( 和 基 准 信 t ) 号 。该 系统 的核 心 为 8 9 单 片 机 。利 用其 高 速输 入 单 元 08 H I 够 检 测 和 记 录 事 件 的特 点 , 表 示相 位 差 的 脉 冲 信 S能 将 号 中( 和 反 应 周 期 T的 基 准 信 号 分 别 从 H I 、HS.输 t ) S. 0 I 1
维普资讯
/, 一
I\设 方 善 一、
圜 囚 因 园 园
单 片 机 相 位 测 量 仪
宝 鸡 文 理 学 院 电 子 电 气 工 程 系 张 正 喜
一 一
攘 本文介绍了 0 o8 {  ̄¥8 单片机实 _荦信号 1 9 毋两 誊 乒 相位疆 的碑 ,哽 懂 ^轭件 ? 萼呻琴其特.。 统与由复 最 该系 l ◇ 路或5 系 单片 成的 ' 枣电 1列 够 l l 量系统 比, 有 摩高 智匏 相 速 亿 电 单 工 靠 特 。 具 路简 作可 等 点
程 序 流 程 如 图 3 示 , 成 系统 初 始 所 完
化 , I 和 HS .输 入 , 冲 区设 置 , HS . 0 I1 缓
平 均 周 期 数 N 的 判 断 , 位 角 计 相 算 , 断 开 放 与禁 止 , 用 数 据 处 理 中 调
基于单片机的智能rlc测试仪的设计【毕业设计论文】[管理资料]
![基于单片机的智能rlc测试仪的设计【毕业设计论文】[管理资料]](https://img.taocdn.com/s3/m/58b261d05901020206409c61.png)
基于单片机智能RLC测试仪的设计毕业设计摘要本文主要论述了基于凌阳SPCE061A单片机的智能RLC测试仪的设计,利用单片机对R、L、C等参数进行测量,可以充分利用单片机的运算和控制功能,方便地实现测量,使测量精度得到提高。
同时用软件程序代替一些硬件测量电路,可在硬件结构不变的情况下,修改软件以增加新的功能。
能够很好的完成对RLC参数的测量,以满足现代测控系统的需要。
关键词:单片机;SPCE061A;RLC测试仪ABSTRACTIt is mainly discussed in this paper that the design of intellectual RLC parameter measurer based on Lingyang SPCE061A MCU. MCU use of R, L, C, and other parameters measured, can take full advantage of MCU processing and control functions, to facilitate the realization of measurements for improved measurement accuracy. Simultaneously uses the software procedure to replace some hardware metering circuits, may in the hardware architecture invariable situation, revi se software to increase the new very good completing to the RLC parameter survey, satisfy the modern observation and control system the need.Keywords: MCU;SPCE061A;RLC testing device目录摘要 (I)ABSTRACT (II)目录 (III)前言 (V)1 系统测试原理与总体方案设计 (1)RLC测试原理 (1)相位+有效值测量 (1)相位+有效值测量方案的软仿真 (2)RLC参数测量方法 (3)总体设计方案 (4)系统原理框图 (4)整个系统工作流程 (4)系统设计中的难点和关键技术 (5)2 RLC测试仪硬件部分实现 (6)-5V电源的设计 (6)标准正弦信号发生模块 (6)标准正弦信号的原理 (6)AD9850芯片简介 (8)AD9850硬件电路图及单片机程序 (9)3 I-V变换模块 (11)I-V变换方案设计 (11)I-V变换的硬件电路 (11)4 同时采样模块 (12)同时采样模块方案设计 (12)A/D芯片的选择 (12)ADS7861芯片介绍 (13)ADS7861转换时序的逻辑控制 (13)5 单片机系统设计 (16)SPCE061A单片机概述 (16)单片机的电源设计 (16)SPCE061A最小系统 (17)6 RLC测试仪应用软件设计 (18)数据采集模块程序流程图 (18)中断程序流程图 (19)主程序流程图 (19)结论 (21)参考文献 (22)致谢 (23)附录 (24)前言随着微电子技术、计算机技术、软件技术的高度发展及其在电子测量技术与仪器上的应用,新的测试理论、新的测试方法、新的测试领域以及新的仪器结构不断出现,在许多方面已经冲破了传统仪器的概念,电子测量仪器的功能和作用发生了质的变化。
单片机测量频率,占空比,相位差

单片机测量频率,占空比,相位差1、 频率及占空比的测量如上图所示,当脉冲的上升沿来临时,将定时器打开;紧接着的下降沿来临时,读取定时器的值,假设定时时间为t1;下一个上升沿来临时关闭定时器,读取定时器的值,假设定时时间为t2。
t1即为1个周期内高电平的时间,t2即为脉冲的周期。
t1/t2即为占空比,1/t2即为频率。
C 语言程序如下:TH0=0; //定时器高位,初值设为0TL0=0; //定时器低位,初值设为0T0_num=0; //定时器溢出次数,初值设为0while(pulse); //pulse 为脉冲的输入引脚while(!pulse); //等待上升沿来临TR0=1; //打开定时器while(pusl1); //等待下降沿来临th1=TH0;tl1=TL0;num1=T0_num; //保存定时器值while(!pusl1); //等待上升沿来临TR0=0; //关闭定时器th2=TH0;tl2=TL0;num2=T0_num; //保存定时器值2、 相位差的测量上升沿打开定时器 下降沿读取定时器值并保存 下一个上升沿关闭定时器,读取定时器值并保存测量相位差的电路如上所示,待测量的两路脉冲分别作为两个D触发器的时钟输入,两个D触发器的输入端D及S端都接高电平,第一个D触发器的输出接第二个D触发器的R端,第二个D触发器的互补输出端接第一个D触发器的R端。
从下面的波形图可以看出,第一个D触发器输出的脉冲信号的占空比乘以2π即为相位差。
这样就将测量两路方波信号的相位差转化为测量一路方波信号的占空比,就可以按照前面介绍的测量占空比的方法来测量了。
黄色的波形为脉冲1,蓝色的波形为脉冲2,红色的波形为相位差。
DSP 56800单片机内部组成与特点

内部程序 Flash/ROM 内部程序 RAM 内部数据 Flash/ROM 内部数据 RAM
外设
JTAG
程序控制器PCU
SR OMR LA LC PC HWS
指令解码 与 中断控制
地址发生器 AGU
M01 N
+/-
SP
MOD ALU
R0 R1
R2
R3
时钟控制 PAB XAB1 XAB2 PDB CGDB PGDB XDB2
在运算或数据处理时,可进行带符号与无符号数的算术运算,支持无 符号整型数据的逻辑运算。其中的乘/加法器MAC支持在一个周期内 并行完成乘和加的运算;极值限制器可监视从36位到32位和从20位到 16位的传送/运算指令的正确执行,不至于因越界而出现错误。共计处 理的数据类型有9种,即8位/16位/32位无符号/带符号数、16位带符 号小数、32位/36位带符号双精度小数。 2. 地址产生器AGU
3. 程序控制器PCU 程序控制器包括1个程序计数器PC,1个状态标志寄存器SR,1个循
环地址寄存器LA,1个循环计数器LC, 1个操作方式寄存器OMR, 1个 硬件堆栈HWS,1个指令解码器与中断控制器。
程序计数器PC用来存放指令地址,状态标志寄存器还可分为MR和 CCR两个部分,共16位。实际使用11位,用以设置状态标志和条件码。 循环地址寄存器LA、循环计数器LC和硬件堆栈HWS主要用于循环指令 的执行。
单片机原理与应用
DSP 56800单片机内部组成与特点
1.1 DSP 56800单片机内部组成与特点 1.2 定时器与中断控制 1.3 串行通信接口 1.4 模数转换器ADC 1.5 相位检测器与脉冲调宽输出PWM
1.1 DSP 56800单片机内部组成与特点
基于单片机的GPS定位系统设计【范本模板】
基于单片机的GPS定位系统设计摘要GPS是全球定位系统英文名词Global Positioning System的缩写.该系统是美国布设的第二代卫星无线电导航系统。
它能为用户提供全球性、全天候、连续、实时、高精度的三维坐标、三向速度和时间信息.其目的是在全球范围内对地面和空中目标进行准确定位和监测。
现在,GPS接收机作为一种先进的导航和定位仪器,已在军事及民用领域得到广泛的应用。
本设计是基于AT89C51单片机来实现的简易GPS定位信息显示系统。
本控制系统主要完成接受数据、时间显示、经度显示、纬度显示等常规功能.此方案基于单片机、GPS模块和12864液晶显示屏等硬件,并应用C语言实现了GPS信号的提取、显示及基本的键盘控制操作等。
经过实践测试,这种接收机可以达到基本GPS信息的接收以及显示,可以做到体积小、精度高、连续导航,并可广泛应用于个人野外旅游探险、出租汽车定位及海上作业等领域。
关键词:GPS定位系统,单片机,液晶显示屏DESIGN OF GPS RECEIVER BASED ON 51 SINGLE CHIPCOMPUTERABSTRACTGPS is the abbreviation of the English term Global Positioning System global positioning system. The system is the United States laid the second generation satellite radio navigation system. It can provide users with continuous, real—time,global, round—the—clock,high precision three dimensional coordinates, three velocity and time information. Aimed at targets on the ground and in the air around the world an accurate positioning and monitoring。
单片机引脚阻抗测量方法

单片机引脚阻抗测量方法1.引言1.1 概述概述部分提供了关于单片机引脚阻抗测量方法的总体介绍。
它将简要描述本文的主题和重要性,并提供一个概览,使读者对下面的内容有一个整体的理解。
概述:引脚阻抗测量方法单片机是一种集成电路,具有多个引脚用于输入和输出数据、信号和电源。
在设计和开发电子设备时,对单片机引脚的阻抗进行测量是非常重要的。
对引脚阻抗的准确了解可以帮助我们更好地了解引脚对电路性能的影响,并采取相应的措施来优化和改进电路设计。
本文将介绍两种常用的单片机引脚阻抗测量方法。
这些方法包括使用测试电路和测量设备来测量引脚电阻和电容的方法。
通过这些测量,我们可以获得引脚的电气特性,如阻抗大小、频率响应和相位差等。
这些数据对于电路设计和性能评估至关重要。
在接下来的部分中,我们将详细介绍每种方法的原理和步骤,并比较它们的优缺点。
我们还将探讨一些常见问题和技巧,以确保准确、可靠和一致的测量结果。
通过本文的阅读,读者将对单片机引脚的阻抗测量方法有一个全面的了解。
这将有助于他们在实际应用中更好地理解和解决与引脚阻抗相关的问题,并优化他们的电路设计。
同时,本文也有助于丰富和扩展这一领域的研究和应用。
在下一节中,我们将开始详细介绍第一种阻抗测量方法。
1.2文章结构文章结构部分的内容可以是:本文主要分为三个部分,分别是引言、正文和结论。
引言部分包括概述、文章结构和目的三个小节。
在概述中,我们介绍了单片机引脚阻抗测量方法的重要性和应用背景。
接着,在文章结构中我们简要概括了本文的整体结构,以引导读者对文章内容有一个整体的认知。
最后,在目的部分我们明确了本文的研究目标,即介绍单片机引脚阻抗测量的两种方法及其应用。
正文部分主要介绍了两种阻抗测量方法。
每种方法都详细描述了其原理、步骤和实验验证。
在阻抗测量方法一的部分,我们详细介绍了其原理和使用场景,并给出了具体的实验步骤和测量结果。
在阻抗测量方法二的部分,我们同样进行了详细的介绍和实验验证。
同频正弦信号间相位差测量的设计
同频正弦信号间相位差测量的设计[导读]介绍了以单片机为核心,通过倍频电路实现的两同频正弦信号相位差测量的设计,并对该系统的硬、软件作了比较详尽的阐述。
关键词:信号介绍了以单片机为核心,通过倍频电路实现的两同频正弦信号相位差测量的设计,并对该系统的硬、软件作了比较详尽的阐述。
关键词:单片机,倍频电路,相位差1 引言本设计目的在于测量出任意两相同频率正弦信号之间的相位差,并将测量结果以数字形式显示出来。
具体实现方法为:先通过比较电路将两路同频信号分别转换为相应的脉冲信号,然后将其中的一路信号通过反相器取反后与另一路信号相与,得到一等脉宽的脉冲波形,此脉冲波形的脉宽t,即表示两信号的相位差。
将原信号对应的任意一路脉冲信号(周期为T)倍频后,作为单片机计数器的计数脉冲,并对相位差脉冲记数,得记数值为W。
设倍频电路的倍频系数为A,则记数脉冲周期为T/A,可得到两信号相位差角计算公式如下:其中N=360/A,N为常数,是相位测量系统的最小精确度。
经过单片机系统编程即可实现此简单运算式,并将运算结果Q送LED显示。
原理框图如图1所示。
2 系统硬件电路原理分析与设计整个系统硬件电路由比较整形电路、倍频电路、单片机AT89C51及显示电路组成。
2.1 比较整形电路电路采用电压比较器LM339。
LM339内有4个电压比较器,取其中的两个比较器即可。
两路信号分别接两个比较器同相输入端,将反相输入端接地,即构成过零比较电路。
两比较器输出即转换为脉冲信号。
将其中一路脉冲通过反相器CC4069取反后与另一路信号通过与门CC4081相与,可得一等脉宽的脉冲信号,此脉宽即记载着两输入信号之间的相位差,我们称之为相位差脉宽。
转换过程见图2。
2.2 倍频电路由相位差计算公式可知,倍频系数A越大,测量精度就越高,测量越准确。
本电路采用A=720的倍频电路,因此相位测量精度为N=360/720=0.5°,可以满足实际需要。
倍频电路由锁相环集成电路CC4046和双BCD(Binary-Coded DecimalNotation)同步加法计数器CC4518组成。
PIC单片机比较器
比较器 SFR 汇总
Bit 31/23/15/7 — — ON Bit 30/22/14/6 — — COE Bit 29/21/13/5 — — CPOL — Bit 28/20/12/4 — — — CREF Bit 27/19/11/3 — — — — Bit 26/18/10/2 — — — — Bit 25/17/9/1 — — — CCH<1:0> Bit 24/16/8/0 — — COUT
写入时会将 IFS1 中的选定位清零,读取时获得的值未定义 写入时会将 IFS1 中的选定位置 1,读取时获得的值未定义 写入时会将 IFS1 中的选定位取反,读取时获得的值未定义 — — I2C2MIE SPI2EIE — — I2C2SIE CMP2IE — DMA3IE I2C2BIE CMP1IE — DMA2IE U2TXIE PMPIE USBIE DMA1IE U2RXIE AD1IE FCEIE DMA0IE U2EIE CNIE
19
比较器
EVPOL<1:0>
写入时会将 CM2CON 中的选定位清零,读取时获得的值未定义 写入时会将 CM2CON 中的选定位置 1,读取时获得的值未定义 写入时会将 CM2CON 中的选定位取反,读取时获得的值未定义 — — SIDL — — — — — — — — — — — — — — — — C2OUT — — — C1OUT
写入时会将 IEC1 中的选定位清零,读取时获得的值未定义 写入时会将 IEC1 中的选定位置 1,读取时获得的值未定义 写入时会将 IEC1 中的选定位取反,读取时获得的值未定义 — — — — SPI2IP<2:0> CMP2IP<2:0> CMP1IP<2:0> PMPIP<2:0> SP2IS<1:0> CMP2IS<1:0> CMP1IS<1:0> PMPIS<1:0>
单片机判断相序
单片机判断相序判断电源中的三相电流的相序对于电力系统的稳定运行非常重要。
在单片机中,可以通过测量电流的相位差和幅值等信息来判断三相电流的相序。
以下是一个简单的方法:1.测量相位差:•使用单片机的定时器来测量三个电流波形的相位差。
相位差是每个相电流波形的起始点之间的角度差。
可以使用定时器的输入捕获功能来记录每个相电流波形的上升沿或下降沿的时间戳。
2.计算相序:•根据相位差的大小和顺序,判断电流的相序。
具体的判断方法取决于系统的具体要求,但通常可以通过比较相邻相位差的大小来确定相序。
3.测量电流幅值:•可以通过使用电流传感器(例如霍尔效应传感器)来测量电流的幅值。
这有助于区分电流的正负方向,从而确定相序。
4.使用相序检测电路:•除了通过软件测量相位差和幅值外,还可以设计硬件电路用于检测相序。
这可能包括比较器、放大器等电路。
以下是一个简化的伪代码示例:// 伪代码示例,具体实现取决于使用的单片机和传感器// 定义变量uint32_t timestamp_A, timestamp_B, timestamp_C;double phase_difference_AB, phase_difference_BC,phase_difference_CA;// 获取时间戳timestamp_A = get_timestamp_phase_A();timestamp_B = get_timestamp_phase_B();timestamp_C = get_timestamp_phase_C();// 计算相位差phase_difference_AB = calculate_phase_difference(timestamp_A, timestamp_B);phase_difference_BC = calculate_phase_difference(timestamp_B, timestamp_C);phase_difference_CA = calculate_phase_difference(timestamp_C, timestamp_A);// 判断相序if (phase_difference_AB < phase_difference_BC &&phase_difference_BC < phase_difference_CA) {// 相序为ABC} else if (phase_difference_AB > phase_difference_BC &&phase_difference_BC > phase_difference_CA) {// 相序为CBA} else {// 相序不确定或异常}请注意,实际的单片机程序需要根据具体的硬件和系统要求进行更详细的实现。
一种基于ARM Cortex微控制器的相位差检测方法

第9卷 第5期 信 息 与 电 子 工 程 Vo1.9,No.52011年10月 INFORMATION AND ELECTRONIC ENGINEERING Oct.,2011 文章编号:1672-2892(2011)05-0600-04一种基于ARM Cortex 微控制器的相位差检测方法刘世国,彭春荣(中国科学院电子学研究所 传感技术国家重点实验室北方基地,北京 100190)摘 要:针对周期信号之间的小相位差难以检测的问题,提出了一种基于ARM Cortex 高性能微控制器,采用相位差放大处理技术的相位差检测方法,先使用放大器和比较器对初始信号进行处理,产生3个方波信号,然后利用ARM Cortex 处理器I/O 口的中断功能来检测相位差。
根据本方法进行了系统的软件、硬件设计和实际信号测试,测试结果表明:信号在1 kHz 时不确定度能达到2%。
关键词:相位差;ARM Cortex 处理器;微控制器;中断中图分类号:TN919.5;TP273 文献标识码:APhase difference measurement based on ARM cortex MCULIU Shi -guo,PENG Chun -rong(State Key Lab of Transducer Technology,Institute of Electronics,Chinese Academy of Sciences,Beijing 100190,China)Abstract: This paper presents a phase difference measurement method of two sine signals based onAdvanced RSIC Machines(ARM) Cortex Micro Control Unit(MCU). This measurement method firstlymagnifies the phase difference,then it uses the interrupt function I/O port of ARM MCU to detect thephase difference. The hardware and software of the detecting system are designed and tested. Theprecision of measurement reaches 2% when the frequency of input signals is 1kHz during testing.Key words: phase difference;Advanced RSIC Machines;Micro Control Unit;interrupt相位差的测量常应用在通信、仪器仪表设计、工业生产等诸多领域[1],它像电压和电流一样是一种非常重要的信号量,但对它的测量相比电压、电流等物理量要复杂些,目前主要有两类检测方法:时域法和频域法。
基于单片机的相位差在线检测
引言:在实际工作中,常常会遇到两列频率相同信号之间存在的相位差,那么就需要测量它们之间的相位差。
电力系统中的电网并网合闸时,需要两电网的电信号的相位相同,这时需要精确测量两列工频信号之间的相位差,相位差测量在工业自动化,智能控制、通讯及电子技术等许多领域有着广泛的应用。
随着计算机软硬件的日益发展。
在测试系统中,以数字信号处理为核心的软件法测量技术越来越多的得到广泛的用。
在电工仪表、同步检测的数据处理以及电工实验中,常常需要测量两列同频信号的相位差。
相位测量的方法很多,典型的传统方法是通过显示器观测,这种方法误差较大,读数不方便。
为此,我们设计一种数字式工频电压相位差测量仪。
一. 系统功能的确定及概念1.1基本要求:⑴ 能够快速准确的测量出相位差; ⑵ 精度较高;⑶ 抗干扰能力强,不受被测信号幅值,频率的影响;⑷ 稳定性较高。
1.2 相位和相位差的概念相位和相位差是正相交流电的重要概念和技术参数。
但是相位也不只是正弦信号的“专利”,非正弦周期信号同样具有相位,因为任何一个非正弦周期信号均可以被分解为一系列频率与初相不同的正弦信号。
相位说明谐波振荡在某一瞬时的状态。
在数学上定义为正弦或余弦函数的幅角,其数学表达式为:)sin()(ϕω+=t A t v式中, ϕ是初始角,ϕω+t 就是相位角,通常称为相位。
ϕωϕ+=t t )(从式中可以看出相位是时间t的线性函数。
令ϕ1(t)、ϕ2(t)表示角频率为1ω2ω 的两个简谐振荡的相位,则有:)()()()()()(21212121ϕϕωϕϕωωφφφ-+=-+-=-=t t t t t从式中可以看出相位角是时间t的函数。
若ω1=ω2,即两个同频率的信号,则有:21)(ϕϕφ-=t显而易见,两个同频率的相位差为常数,由初始相位角之差确定。
相位差反映了若干个正弦量之间的相位关系。
同频正弦量的相位关系是:超前、滞后、同相、反相、正交。
当A 、B 两个频率相同的正弦信号电压波形同时增大,同时减小,同时为正半周,同时为负半周,同时达到正峰点,同时达到负峰点,这样的两种信号其相位相同,信号的相位差0 o ,称为同相信号。
低频数字式相位测试仪的设计与实现

低频数字式相位测试仪的设计与实现尹晓慧;陈劲;张宝菊;王为【摘要】基于过零检测法,以微控制器ATmega 128和可编程逻辑器件EPM1270为核心,设计并实现了对双路同频低频信号的相位差和频率进行测量的系统.在一个可编程逻辑器件(Complex Programmable Logic Device,CPLD)内实现了数字式相位差和频率的数据采集,简化了系统设计.系统可以对200 Hz~10 kHz频率范围内的信号进行相对精确的测量,与传统相位测量仪相比,具有硬件电路简单、测量速度快和易于实现等优点.【期刊名称】《天津师范大学学报(自然科学版)》【年(卷),期】2012(032)001【总页数】4页(P39-42)【关键词】相位测量;频率测量;CPLD;微控制器;液晶显示【作者】尹晓慧;陈劲;张宝菊;王为【作者单位】天津师范大学物理与电子信息学院,天津300387;天津师范大学物理与电子信息学院,天津300387;天津师范大学物理与电子信息学院,天津300387;天津师范大学物理与电子信息学院,天津300387【正文语种】中文【中图分类】TM932在电子测量技术中,相位测量是最基本的测量手段之一,相位测量仪是电子领域的常用仪器.随着相位测量技术广泛应用于国防、科研和生产等各个领域,对相位测量的要求也逐步向高精度、高智能化方向发展.在低频范围内,相位测量在电力和机械等部门具有非常重要的意义[1],目前相位测量主要运用等精度测频和锁相环(Phase Locked Loop,PLL)测相等方法.研究发现,等精度测频法具有在整个测频范围内保持恒定高精度的特点,但该原理不能用于测量相位[2].PLL测相可以实现等精度测相,但电路调试较复杂.因此,本研究选择直接测相法作为低频测相仪的测试方法.对于低频相位的测量,使用传统的模拟指针式仪表显然不能满足所需的精度要求,随着电子技术和微机技术的发展,数字式仪表因其高精度的测量分辨率以及高度智能化、直观化的特点得到越来越广泛的应用因此,本研究设计并实现了以CPLD和微控制器(Micro Control Unit,MCU)为核心的低频数字式相位测量仪.相位差测量的基本原理有3种:对信号波形的变换比较、对傅氏级数的运算和对三角函数的运算[2-3].3种原理分别对应过零检测法、倍乘法和矢量法3种测量相位差的方法.过零点检测法是一种将相位测量变为时间测量的方法,其原理是将基准信号的过零时刻与被测信号的过零时刻进行比较,由二者之间的时间间隔与被测信号周期的比值推算出两信号之间的相位差.这种方法的特点是电路简单,且对启动采样电路要求不高,同时还具有测量分辨率高、线性好和易数字化等优点.任何一个周期函数都可以用傅氏级数表示,即用正弦函数和余弦函数构成的无穷级数来表示,倍乘法测量相位差所用的运算器是一个乘法器,2个信号是频率相同的正弦函数,相位差为φ,运算结果经过一个积分电路,可以得到一个直流电压V=k cosφ,电路的输出和被测信号相位差的余弦成比例,因此其测量范围在45°以内,为使测量范围扩展到360°,需要附加一些电路才可以实现.倍乘法由于应用了积分环节,可以滤掉信号波形中的高次谐波,有效抑制了谐波对测量准确度的影响. 任何一个正弦函数都可以用矢量来表示,如各个正弦信号幅度相等、频率相同,运算器运用减法器合成得到矢量的模V=2E sinφ/2.矢量法用于测量小角度范围时,灵敏度较好,可行度也较高;但在180°附近灵敏度降低,读数困难且不准确.由于系统输出为一余弦或正弦函数,因此这种方法适用于较宽的频带范围[1].上述3种测量相位的方法各有优势,从测量范围、灵敏度、准确度、频率特性和谐波的敏感性等技术指标来看,过零检测法的输出正比于相位差的脉冲数,且易于实现数字化和自动化,故本研究采用过零检测法.采用过零检测法需要对被测信号的周期进行测量,由于信号的周期与频率之间呈倒数关系,本研究采用测量被测信号频率的方法实现对其周期的测量.频率测量的方法很多,可分为2大类:第1类是单位时间内测量脉冲周期的方法,这种方法的优势是能够用标准的基准单位时间对被测信号时钟进行脉冲测量,简单方便,容易实现,但是由于使用了基准的单位时间,所以测量脉冲时,如果被测信号的周期接近基准时钟的周期,测量的准确度就会下降,精度难以得到保障,所以这种方法只适合于测量高频信号,或者说这种方法只适合于基准时钟周期比被测信号周期大得多的情况;第2类测量方法是使用高频时钟对被测信号的单个时钟周期进行高频计数,这种方法的优点是使用高频时钟对被测信号的单个时钟周期进行高频计数可以在一个被测信号周期内完成对频率的测量,对于低频被测信号具有较高的精度,但设计较为复杂.本研究所涉及的频率测量范围为200 Hz~10 k Hz,属于低频信号,因此可以采用高频时钟的方法对频率进行测量.每种测量方法均存在2种具体的测量手段:一种是利用专用频率计模块来测量频率,如ICM7216芯片,其内部自带放大整形电路可以直接输入正弦信号,外部振荡电路部分选用由一块高精度晶振和2个低温度系数电容构成的10 MHz振荡电路,其转换开关具有0.01 s、0.1 s、1 s和10 s共4种闸门时间,量程可以自动切换,待计数过程结束时显示测频结果;另一种方法是利用CPLD和MCU来实现频率的测量,将被测信号通过模拟电路转换为方波信号输入EPM1270的某一I/O端口,在CPLD内部实现频率的采集,最后将计数值送入MCU处理并输出至液晶予以显示.比较2种测量手段,利用实验室现有条件,本研究采用CPLD和MCU实现对被测信号频率的测量.利用单片机控制计数器工作,硬件简单且频率测量精度高,这是目前较为成熟的一种高精度测频方案.系统的设计目标是实现双路同频率正弦波信号相位差和频率的测量.本研究采用数字鉴相技术在保持模拟式相位测试优势的同时,提出并实现了一种基于CPLD的低频数字式相位测试仪.该系统主要由数据采集电路、数据运算控制电路和数据显示电路3部分构成,采用CPLD和AVR单片机相结合构成整个系统的测控整体.CPLD主要负责数据采集,单片机负责读取CPLD采集的数据,再根据这些数据作出相应计算,并通过液晶将结果显示出来.系统在保持模拟式相位测试优点的同时,具有抗干扰能力强、外围电路简单和易于实现等优点[4-5].测量相位差的具体方法为:先通过比较电路将两路同频率正弦信号分别转换为相应的脉冲信号将其中一路信号直接送入D触发器,作为触发信号;另一路信号通过反相器取反后与复位信号相与,将得到的结果送入D触发器的清零端,由D触发器输出一脉冲信号,此脉冲波形的脉宽为t,经过微处理器进行相应计算处理后得到两信号的相位差[6-7].设计中频率测量的具体方法是:被测信号转换后形成脉冲信号,利用其上升沿触发计数器对基准时钟开始计数,处于下降沿时则停止计数,所得计数为N,利用t=N×T/2,f=1/t,其中T为所用晶振的时钟周期,利用单片机系统编程实现该运算式,即可求得频率,并将运算结果送液晶显示.系统的原理框图如图1所示.3.2.1 模拟部分模拟电路部分要将同频率的两路正弦信号转换为方波输出,电路采用电压比较器LM393.LM393内有2个电压比较器,两路信号分别接2个比较器同相输入端,将反相输入端接地,即构成过零比较电路.前级的射随器采用LM353,其作用是提高输入阻抗,提高负载.过零比较器使用芯片LM393来实现,该芯片性能较好,能够有效提取正弦波的过零点.选择使用过零点这种判断方法是因为正弦波在过零点的时候,斜率具有极大值,即使两列正弦波幅度略有不同,也不会对测量结果造成过大影响,所以芯片上输出口的上拉电阻主要用于控制高低电平输出的大小.图2和图3分别是A、B两路同频率正弦信号经过模拟电路转化为方波的电路图,其中W31和W32同时接通时构成跟随器,W32和W34同时接通时构成比例放大器.3.2.2 部分参数选择整个电路设计中,参数的选取至关重要,CPLD中计数器的时钟频率要选择恰当,时钟的脉宽要保证输入方波信号的高电平时间Δt最小时存在计数值,即系统能够采集Δt最小时的输入信号;同时,还要保证Δt最大时,计数器存在计数值,即能够采集到最大的相位差360°.根据相位误差范围的要求,计算Δφ=Δt/T×360°=0.5°,当 T=10 k Hz时,Δt=0.139μs,分频系数=0.139/0.05=2.78,故本设计采用2分频.由于AVR单片机数据位的限制,最终得到下限频率取200 Hz,此时,系统测量的展伸不确定度范围符合设计要求.系统的软件设计流程图如图4所示.本研究使用模块化的设计方法,所以软件模块和硬件模块均首先各自独立进行调试,独立调试通过后,再进行系统的软硬件综合调试.在调试输入波形整形模块时,首先检查该模块所有芯片的工作电压是否正常,调整工作电压后,再测试射随器的输出电压,如果其输出电压正常,则测试过零比较器的输出端,看其电压是否正常;如果不正常,可以稍微调整负载电阻,使其输出电压正常.实验所得数据均为正常情况下于实验室中测试得出,测试结果如表1所示.由表1数据可知,系统可以测量一定频率范围内2个同频正弦信号之间的相位差,并能达到稳定的测量精度(理论推算为0.5°,实际可达±3°).测试结果存在的误差来源于所选基准时钟的准确性以及采用软件计数存在一定的延时.在实际应用中,CPLD可采用更高的晶振频率来增加频率的测量范围,并提高测量精度.本研究以微控制器ATmega 128和可编程逻辑器件EPM1270为核心,将单片机控制技术和电子设计自动化(Electronic Design Automation,EDA应用技术有机结合在一起,完成了低频数字式相位测试仪的设计与制作.由于可编程逻辑器件可以完成较大且较为复杂的逻辑处理任务,而且它灵活方便,易于移植,可通用性强,因此系统主要的逻辑功能均在可编程逻辑器件内部完成.本研究所设计的低频数字式相位测试仪采用CPLD,外围电路较为简单,工作可靠,电路调试和维护简单易行.【相关文献】[1]田秀丰,何继爱,李敏.低频数字式相位测量仪的设计[J]无线电通信技术,2008(2):55-61.[2]陈明杰.低频数字相位(频率)测量的CPLD实现[J].微计算机信息,2008,24(32):224-225.[3]缪晓中.基于MCU+CPLD的相位差和频率的测量方法研究及实现[J].国外电子元器件,2008(7):10-12.[4]姚远,王丽婷,郭佳静.低频数字式相位测量仪[J].电子世界,2004(5):39-41. [5]潘洪明,邹立华,方燕红.同频正弦信号间相位差测量的设计[J].电子工程师,2003,29(3):41-42.[6]欧冰洁,段发阶.超声波隧道风速测量技术研究[J].传感技术学报,2008,21(10):1804-1807.[7]车惊春,韩晓东.Protel DXP印制电路板设计指南[M].北京:中国铁道出版社,2004:94-110.[8]龙腾科技.Protel DXP循序渐进教程[M].北京:科学出版社,2005:22-52.。
单片机软件系统的设计—频率和相位的测量.

单片机软件系统的设计—频率和相位的测量单片机软件系统的设计—频率和相位的测量1、测量频率参数测量频率参数只需要一个通道(电压或电流)的脉冲信号,设选用电压通道,由于是低频50Hz左右,因此要采用测周期的方案来换算出频率参数(低频测周期比较精确,高频测频率比较精确)。
由于电压通道接到单片机的外部中断INT0,只要计数两次INT0中断的间隔时间便可换算出频率。
间隔时间采用定时器1统计,设晶体振荡器为12MHz,则一个机器周期为1μS,测量的结果保存在75H、74H中,程序如下:测频准备阶段的程序:SETB EX0;允许外部中断0中断,以便于测频MOV TH1,#0原文请找腾讯3249114六,维^论~文.网MOV TL1,#0MOV TMOD,#10H 外部中断0中断服务程序:SETB TR1JNB P3.2,$JB P3.2,$CLR TR1MOV 74H,TL1MOV 75H,TH1RETI 2、测量相位参数在测频的基础上,利用另外一个通道即电流通道产生的外部中断1中断信号,我们只要统计两个通道的中断间隔时间即得到两个通道相位之间的误差时间,再除以一个周期(测频率时已经测出)的时间,再乘以360,即为相位差。
设测量结果报存在77H、76H中,程序如下:测相准备阶段的程序:SETB EX0;允许外部中断0中断SETB EX1;允许外部中断0中断 MOVTH1,#0MOV TL1,#0MOV TMOD,#10H 外部中断0中断服务程序:SETB TR1RETI外部中断1中断服务程序:CLR TR1MOV 76H,TL1MOV 77H,TH1RETI测频用到了外部中断0,测相也用到了外部中断0,要区别两个含义不同的外部中断0,需要用一个标志位加以区别。
以上检测程序就基本完成了,下面的就是关于这批数据的计算和换算程序了。
现在从70H~77H中均保存了有效数据,这些数据还都没有经过计算和换算,还都是“半成品”,但是我们要清除这里边都是什么数据。
用单片机测量相位差的新方法
3
误差分析
影响该相位差测量精度的主要因素有 : ①运算放大器的偏移电压和偏移电流引起的误
差 : 经计算这两项误差之和不超过 0. 5 % 。 ② DAC 和计数器的量化误差 : 该误差之和不超过
0. 8 % 。
③ 模拟开关的断开电阻不为无穷大引起的误差 : Ω 以上 ,该误差不超过 0. 5 % 。 典型的断开电阻在 1M
θ
( 7)
θ= M1 π/ ( 2 n - 1) 计数值 M1 输入 AT89C52CPU , 经计算处理输出两 信号的相位差 , 并送显示电路显示 。可见 : 两信号的相 位差只与计数值及数模转换器 DAC 的位数有关 , 而与 时钟频率 、 信号频率无关 。 测量原理与双斜式模数转换 器 ADC 的转换原理类似 ,精确度可达 0. 01 % 。
M 为 tr 或 tf 内的计数值 , T 为信
图1 过零比较法
号频率 该法不仅与信号频率 、 时钟频率有关 , 而且易受元 件性能影响 , 当过零不稳时 , 上升沿或下降沿的时间差 并不能反映信号的真实相位差 ,见图 1 ( e) 。 而信号中点 的时间差 Δt (Δt = 位差
3 3 3
[2 ]
・ 30 ・( 总 344)
用单片机测量相位差的新方法
2000 年
用单片机测量相位差的新方法
A Ne w Wa y to Measure Phase Difference with Single - Chip Computer
史健芳
( 太原理工大学
太原
030024)
【摘
要】 介绍了利用 AT89C52 单片机测量两正弦信号相位差的测量原理 、电路组成 , 并分析了引起误差的原
方法来测量信号的相位差 。测量原理电路如图 2 所 示。 电路由 AT89C52CPU、 比较器 、 计数器 、 DAC 转换 器、 积分器等组成 , 正弦信号 x1 、x2 经比较器转换为方 波信号 m1 、 m2 , 经异或门输出两信号的上升沿及下降 沿的时间差 tr 及 tf , m1 信号经二分频电路输出 m4 信 号 ,工作波形如图 3 ( a) ~ (f) 。
第四章频率和相位的测量

三、电动系三相相位表
• 电动系三相相位表与电动系单相相位表的结构完 全相同,只是两个可动线圈所连接的元件不同, 单相相位表接R、L元件,而三相相位表两路都是 接电阻,分别为:R1、R2 。
3.量化误差:
• 计数闸门开启时间不刚好是被测信号周期的整数 倍,而且脉冲到达时刻不刚好是闸门开启时刻, 因此在相同的开启时间内,可能会有正负一个数 的误差。
量化误差示意图
计数闸门开启时间 不刚好是被测信号周期 的整数倍造成的量化误 差。
在时间 T 内脉冲个 数为7.5,测出数可能为6。
计数开始不刚好是第 一个脉冲到达时刻,造成 的量化误差。
I
I1
I2
U1 R1
U2 R2
• 式中U0、U1值与u、I 相位差有关。因此可根据检 流计的电流值测得相位差。
分析 1、当 u、i 同相时变换式相位表波形
2、当 u、i 相位差为 90°时变换式相位表波形
1、当 u、i 同相时变换式相位表波形
1.只有u1正半波,才能有电流通过VD5、VD6形成压降U1 、U2如 图中红线所示。
• (3)控制电路
– 控制电路在所选择的基准时间内打开主闸门,允许整 形后的被测脉冲信号输入到计数器中。
• (4)计数器和显示器
– 对控制门输出的信号进行计数,并显示计数值。
通用计数器的基本组成和工作方式
通用计数器一般都具有测频和测周两种方式。基本 组成
如图所示。
如图中A输入端(fA=fx),晶振标准频率fc信号接到B输入端 (fB=fc),则计数器工作在测频方式,此时:
07.4-相位修正PWM
第7.4章相位修正PWM7.4.1概述相位修正PWM的概念与快速PWM很类似,有话说只要学会了快速PWM,相位修正PWM自然而然也变成很容易。
从定义上来看,相位修正PWM仅有快速PWM 的频率的一半,这话很容易理解。
当相位修正PWM产生一个周期的方波的时候,快速PWM就已经产生2个周期的方波,所以从字面上的意思来看,快速PWM的频率是前者的一倍。
当然也可以这样理解:快速PWM适合,高频,PWM信号要求精确度不太高;而相位修正则,适合低频,对PWM信号的精确度要求高。
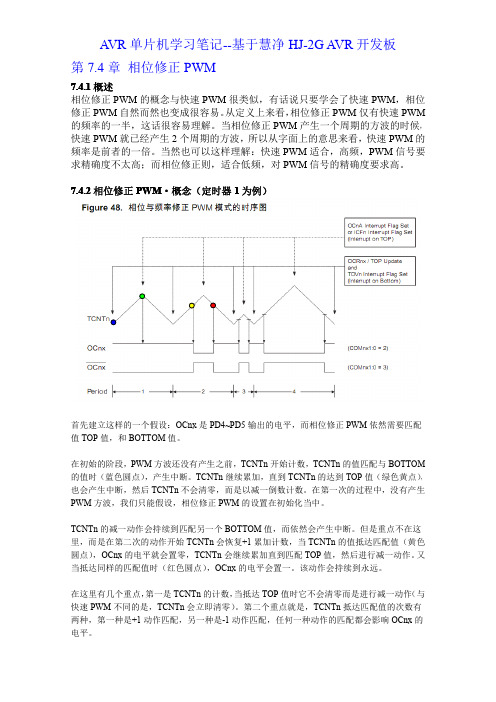
7.4.2相位修正PWM·概念(定时器1为例)首先建立这样的一个假设:OCnx是PD4~PD5输出的电平,而相位修正PWM依然需要匹配值TOP值,和BOTTOM值。
在初始的阶段,PWM方波还没有产生之前,TCNTn开始计数,TCNTn的值匹配与BOTTOM 的值时(蓝色圆点),产生中断。
TCNTn继续累加,直到TCNTn的达到TOP值(绿色黄点),也会产生中断,然后TCNTn不会清零,而是以减一倒数计数。
在第一次的过程中,没有产生PWM方波,我们只能假设,相位修正PWM的设置在初始化当中。
TCNTn的减一动作会持续到匹配另一个BOTTOM值,而依然会产生中断。
但是重点不在这里,而是在第二次的动作开始TCNTn会恢复+1累加计数,当TCNTn的值抵达匹配值(黄色圆点),OCnx的电平就会置零,TCNTn会继续累加直到匹配TOP值,然后进行减一动作。
又当抵达同样的匹配值时(红色圆点),OCnx的电平会置一。
该动作会持续到永远。
在这里有几个重点,第一是TCNTn的计数,当抵达TOP值时它不会清零而是进行减一动作(与快速PWM不同的是,TCNTn会立即清零)。
第二个重点就是,TCNTn抵达匹配值的次数有两种,第一种是+1动作匹配,另一种是-1动作匹配,任何一种动作的匹配都会影响OCnx的电平。
7.4.3相位修正PWM相关的寄存器与该相关的寄存器简直就是与快速PWM的一模一样。
基于单片机激光测距毕业设计

基于单片机激光测距毕业设计本科生毕业设计基于单片机的激光测距院系电气信息工程学院专业电子信息工程班级学号学生姓名联系方式指导教师职称:2011年 5 月独创性声明本人郑重声明:所呈交的毕业论文(设计)是本人在指导老师指导下取得的研究成果。
除了文中特别加以注释和致谢的地方外,论文(设计)中不包含其他人已经发表或撰写的研究成果。
与本研究成果相关的所有人所做出的任何贡献均已在论文(设计)中作了明确的说明并表示了谢意。
签名:年月日授权声明本人完全了解许昌学院有关保留、使用本科生毕业论文(设计)的规定,即:有权保留并向国家有关部门或机构送交毕业论文(设计)的复印件和磁盘,允许毕业论文(设计)被查阅和借阅。
本人授权许昌学院可以将毕业论文(设计)的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存、汇编论文(设计)。
本人论文(设计)中有原创性数据需要保密的部分为(如没有,请填写“无”):签名:年月日指导教师签名:年月日摘要激光具有高亮度、高方向性、高单色性和高相干性等优点,所以,利用激光传感器技术和自动控制技术相结合的测距方案中,激光测距是目前应用最普遍的一种,本课题介绍了激光传感器的原理和特性,以及Atmel公司的AT87C51单片机的性能和特点,并在分析了激光测距的原理基础上,指出了设计测距系统的思路和所需考虑的问题,给出了以AT87C51单片机为核心的低成本,高精度。
微型化数字显示激光测距的硬件电路和软件设计方法,该系统设计合理,工作稳定,能量良好,检测速度快,计算简单。
易于做到实时控制,并且在测量精度方面能达到工业应用的要求。
关键字:激光;测距;单片机ABSTRACTLaser possesses high brightness, high directional, high monochromatic and high coherence wait for an advantage, therefore, by using laser sensor technology and automatic control technology in combination of measurement program, laser range is most broadly applied , the subject of laser sensors is introduced, and the principle and characteristics of single chip AT87C51 Atmel company performance and characteristics, and analyzes the principle of laser range finder, points out the basis of ideas and design ranging system needed consider the question, given a AT87C51 singlechip is low cost, high precision. Miniaturization digital display laser ranging hardware circuit and software design method, the system design is reasonable, stable work, energy, detection speed, good simple calculation. Easy to achieve real-time control, and the precision in measurement can reach the request of industrial applications.Key word: laser; ranging; microcontroller目录1 绪论 12 激光测距的基础 22.1 激光测距设计的思路 22.2 激光测距设计的原理 32.3 本激光测距设计的要求 42.4 本论文的主要研究内容 43 脉冲激光测距系统设计 53.1 激光测距仪系统结构 53.2 激光脉冲发生电路 63.3 脉冲激光接收电路7光电检测传感器的比较选择7雪崩光电二极管APD 8雪崩光电二极管APD的反向偏压 9 电路工作原理9电压控制反馈电路10放大电路124 计时及显示部分设计144.1 计时部分14计时原理 14内插法14利用单片机和CPLD实现模拟内插 15 4.2 距离计算部分17最小系统17计算部分子程序设计184.3 计算机控制LED显示部分19LED说明1974HC573说明20控制的LED显示部分电路设计21显示部分程序设计234.4 系统控制部分设计245 误差分析及总结 255.1 误差分析255.2 总结展望26参考文献27附录28致谢321 绪论二十世纪以来,激光传感器技术日趋成熟,并开始大量应用于测距系统。
FTM详解(K10单片机PWM)
kinetis定时器FTM详解分类:Kinetis 602012-03-10 10:46 101人阅读评论(0) 收藏举报FTM模块FTM模块是一个多功能定时器模块,主要功能有,PWM输出、输入捕捉、输出比较、定时中断、脉冲加减计数、脉冲周期脉宽测量。
在K10中,共有FTM0,FTM1,FTM2三个独立的FTM模块。
其中FTM0有8个通道,可用于电机或舵机的PWM输出,但不具备正交解码功能,也就是对旋转编码器输入的正反向计数功能。
而FTM1和FTM2则具备正交解码功能,但是FTM1和FTM2各只有两个通道。
FTM模块的时间基准来自一个16位的计数器,该计数器的值可读取,即可作为无符号数对待,也可作为有符号数的补码对待。
FTM模块特性1时钟源可选择,FTM的时钟源可以来自系统时钟或外部时钟。
可对时钟分频,分频比为1,2,4,8,16,32,64,128。
2FTM的一个16位计数器,该计数器可设置为自由运行或由用户设置起始和结束值,可递增计数也可递减计数。
3FTM的每个通道都可以设置为输入捕捉、输出比较或边沿对其的PWM输出。
4在输入捕捉模式下,可捕捉上升沿、下降沿或两个边沿都捕捉,有些通道可选择输入滤波器。
5在输出比较模式下,在比较成功时可选择输出信号置位、清零或翻转。
6所有的通道都可以设置为中心对齐的PWM输出模式。
7每对通道都可以级联以产生PWM信号。
8FTM的通道可成对工作在相同输出或互补输出,也可各通道独立输出。
9当通道成对互补输出时可使用死区插入。
10可产生触发信号。
11软件控制PWM输出。
12最多4个全局错误控制使用的错误输入。
13每个通道的极性可设置。
14每个通道都可产生中断。
15错误条件发生时也可产生中断。
16同步载入或写入带缓冲的FTM寄存器。
17关键寄存器有写保护功能。
18和HS08系里的TPM兼容。
19对于维持在低电平或高电平的信号也可进行输入捕捉的测试。
20双边沿捕捉可用于脉冲或周期信号宽度测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
相位差计算
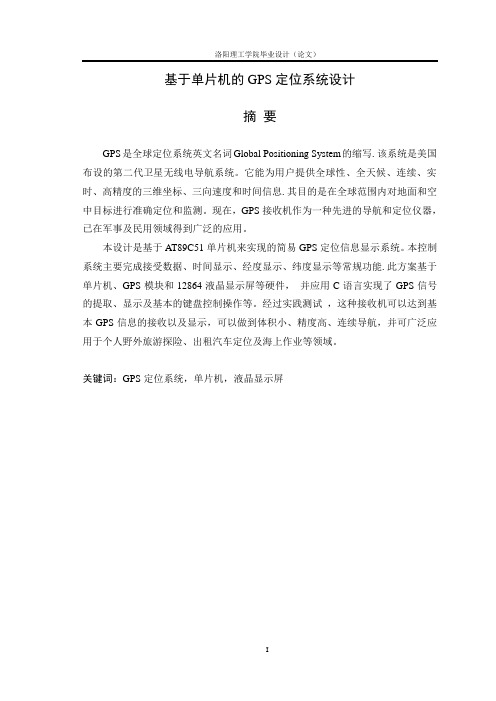
本设计目的在于测量出基 准脉冲与振动正弦信号之间 的相位差,通过比较电路将 振动正弦信号转换为相应的 脉冲信号,然后将该信号通 过反相器取反后与基准脉冲 相遇,得到一等脉宽的脉冲 波形,此脉冲波形上的脉宽t, 即表示两信号的相位差,计 算过程通过单片机实现。具 体链接如图所示:
显示电路
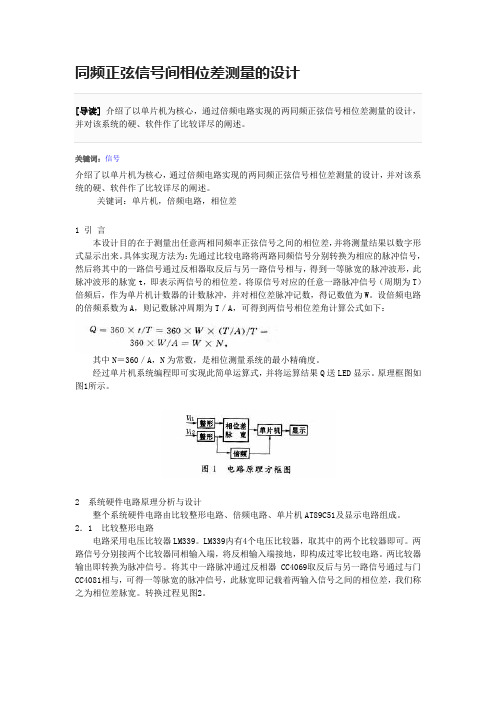
信号滤波
设计滤波器的传统方法是 用电阻,电容和电感构成无 源滤波器或者加上运算放大 器构成有源滤波器,这种方 法无法实现自动跟踪滤波, 利用开关电容滤波器就可以 实现跟踪滤波。我设计的是 基于MAX268 的中心频率较 低的窄带通自动跟踪滤波器, 电路简单,工作可靠,具有 实用价值。滤波的效果如图 所示。
总结
本文详细论述了砂轮不平衡量的获取方 法,不平衡量进行处理,并通过单片机计 算其对于基准信号的相位差,最后以基准 信号为参考点,平衡不平衡量。重点是深 入研究了单片机并建立了单片机测相位差 的模型,使得砂轮系统在保证基本运转的 情况下,实现在线相位检测。
通过计算后,即可得到相位差, 将相位差送至显示电路。设计中 将 AT89C5l 的 PO II作为 8段显示的 段选位,PO.0—PO.7分别对应数码 管的 abcdefgh段。将 P2 口作为位 选位,P2.0—P2. 3 分别对应从高到 低的 4位数码管段位选段,采用动 态扫描显示技术,得到的值会及 时显示出来。
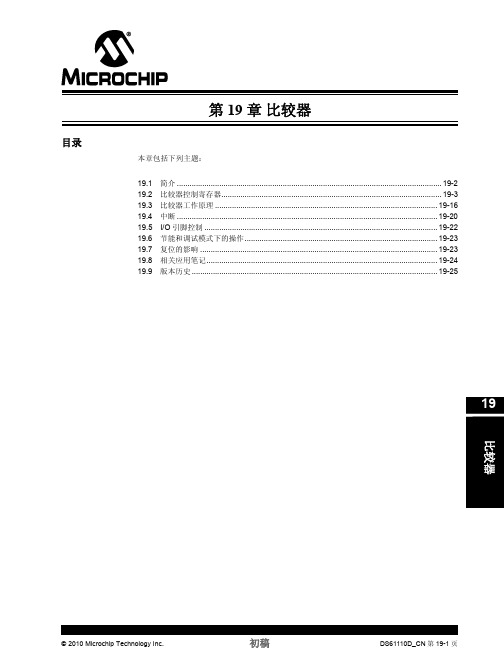
信号获取
考虑到砂轮在工作时飞 速旋转,传感器的轻微动作 都会影响提取的信号的精度, 故我采用了体积较小的光电 式传感器。同时为了避免用 贴片长度来保证基准信号的 占空比,我使用了分频器 4024,和倍频电路来处理信 号。其中倍频电路由锁相环 4046和分频器4024构成,如 图。
信号放大
信号提取后,需要对其放 大以能驱动后面电子芯片。对 于放大器的设计,由于不知道 振动量的大小,所以,程控放 大电路的选择具有非常重要的 意义。为了可以拓宽系统的测 量范围,提高系统动平衡精度, 防止不平衡信号发生截止失真。 我选择了:高精度运算放大器 OP07、通用运算放大器 MCP604和模拟电子开关 CD4052组成高输入阻抗,低 输出阻抗,具有稳定增益的同 相放大器。
基于单片机在砂轮不平衡相位在 线检测中的应用
论文主要内容
• • • • • 1总体方案设计 2信号提取设计 3信号放大设计 4信号滤波设计 5相位差计算及显示电路设计
Байду номын сангаас 总体方案设计
通过老师的指导,利用 所学的知识,确定了平衡 系统的基本思路,即:
信号获取→信号 放大→信号滤波→ 相位差计算及显 示。