非线性规划模型
最新6非线性规划模型汇总
分 投入资金使生猪体重随时间增加,出售单价随 析 时间减少,故存在最佳出售时机,使利润最大
建模及求解
估计r=2, g=0.1 若当前出售,利润为80×8=640(元)
t 天 生猪体重 w=80+rt 出售 出售价格 p=8-gt
销售收入 R=pw 资金投入 C=4t
注意:缺货需补足
0
T1 T
t
Q~每周期初的存贮量
每周期的生产量 R (或订货量)
RrT 2c1rc2 c3 c2 c3
RQQQ~不允许缺货时的产量(或订货量)
6.2 生猪的出售时机
问 饲养场每天投入4元资金,用于饲料、人力、设 题 备,估计可使80千克重的生猪体重增加2公斤。
市场价格目前为每千克8元,但是预测每天会降 低 0.1元,问生猪应何时出售。
• 设g=0.1不变
t40r60, r1.5 r
t 对r 的(相对)敏感度
20
t
15
S(t,
r)
Δt Δr
/ /
t r
dt dr
r t
10
60
5
S(t,r)
3
40r60
0
1.5
2
2.5
r3
生猪每天体重增加量r 增加1%,出售时间推迟3%。
敏感性分析
t 4r40g2 rg
研究 r, g变化时对模型结果的影响 估计r=2, g=0.1
• 这是一个优化问题,关键在建立目标函数。
显然不能用一个周期的总费用作为目标函数
目标函数——每天总费用的平均值
模型假设
1. 产品每天的需求量为常数 r; 2. 每次生产准备费为 c1, 每天每件产品贮存费为 c2; 3. T天生产一次(周期), 每次生产Q件,当贮存量
非线性规划模型在管理科学中的应用研究
非线性规划模型在管理科学中的应用研究绪论管理科学是一门研究如何应用科学方法和技术来解决管理问题的学科,其中非线性规划模型作为一种重要的工具,得到了广泛的应用和研究。
本文将从理论和实践两个方面探讨非线性规划模型在管理科学中的应用研究。
一、非线性规划模型的理论基础非线性规划模型是在约束条件下,求解非线性目标函数的最优解。
它的理论基础主要包括最优性条件、解的存在性和稳定性等方面。
其中,最优性条件是非线性规划问题的核心内容之一,包括一阶和二阶条件。
一阶条件主要包括最优解的必要条件和克拉默条件。
最优解的必要条件要求目标函数在最优解处的偏导数等于零,这意味着最优解的局部均衡点满足一阶条件。
克拉默条件要求约束函数在最优解处的梯度向量线性相关,这可以帮助我们判断最优解的全局特性。
二阶条件主要包括最优解的充分条件和李普希茨条件。
最优解的充分条件要求目标函数的海森矩阵在最优解处半正定,这保证了最优解的局部最小性。
李普希茨条件要求约束函数在最优解处的雅可比矩阵满秩,这可以帮助我们判断最优解的全局稳定性。
二、非线性规划模型的应用场景非线性规划模型可以广泛应用于管理科学中的各个领域,如生产计划、供应链管理、投资组合等。
在生产计划中,我们可以利用非线性规划模型来优化产品的生产数量和生产调度,以最大化产能利用率和实现生产成本最小化。
在供应链管理中,非线性规划模型可以用于确定最佳的供应链网络结构和物流配送路线,以最大程度地降低运输成本和缩短交货时间。
在投资组合中,非线性规划模型可以用于确定最佳的资产配置比例,从而实现收益最大化和风险最小化。
三、非线性规划模型的实践应用案例以下以某公司生产计划为例,说明非线性规划模型在实践中的应用。
某公司的生产计划包括两个阶段,每个阶段有不同的生产能力和生产成本。
为了最大化利润,公司需要确定每个阶段的生产数量。
首先,我们可以建立一个非线性规划模型,将利润最大化作为目标函数,将每个阶段的生产数量作为决策变量,将约束条件包括生产能力、市场需求等考虑进去。
非线性整数规划模型(LINGO代码实现)

⾮线性整数规划模型(LINGO代码实现)⾮线性整数规划模型LINGO讲解分析:第⼀步:确定决策变量问题是确定调运⽅案,使得总运输费⽤最⼩。
⽽总运输费⽤=货物运量*货物单价,题⽬给了货物单价了,我们求货物运量即可,这⾥的货物运量则是我们的决策变量。
第⼆步:确定⽬标函数和约束条件上图第⼀⾏就是我们的⽬标函数,下⾯三⾏是我们的约束条件,在满⾜约束条件的前提下,软件会不断遍历Xij所有可能的值,然后z也会根据Xij的变化⽽产⽣不同的值,这个时候⽤⼀个min函数取所有可能值当中的最⼩值,即可。
第三步:⽤LINGO代码实现model:title 最少运费问题;sets:!集合的定义,WH是集合的名字,W1..W6是集合的长度,⼀般写成1..6,相当于创建了⼀个能放六个元素的容器WH,是抽象的,是虚⽆的,是⼀种声明,告诉我们“:”后⾯的变量是⼀个什么类型的变量,显然,后⾯的AI是⼀个确确实实有六个数的数组,是具体的,是实在WH/W1..W6/:AI;!集合的名称、集合内的成员、集合的属性(可以看成是与改集合有关的变量或常量,相当与数组);VD/V1..V8/:DJ;links(WH,VD):C,X;!以WH和VD为基础,衍⽣集合。
相当于把两个向量结合在⼀起,形成⼀个⼆维数组,有⾏和列,C和X这两个变量是实在的具体的⼆维数组,只不过后⾯C我们赋值了,X是通过系统根据约束条件和⽬标函数⾃⼰赋值的;endsetsdata:!数据段;AI=60,55,51,43,41,52;DJ=35,37,22,32,41,32,43,38;C=6,2,6,7,4,2,5,94,9,5,3,8,5,8,25,2,1,9,7,4,3,37,6,7,3,9,2,7,12,3,9,5,7,2,6,55,5,2,2,8,1,4,3;enddatamin=@sum(links(I,J):c(i,j)*x(i,j)); !⽬标函数.links我们上线提到了,是⼀个6X8的集合名;@for(WH(i):@sum(VD(j):x(i,j))<=AI(I));!约束条件.@for⼀出,你就要知道这⼀⾏写的就是约束条件了;@for(vd(j):@sum(WH(i):x(i,j))=DJ(j));!约束条件.;end。
运筹学模型的类型
运筹学模型的类型运筹学模型是指通过数学方法来描述和解决复杂问题的一种工具。
根据问题的性质和要求,运筹学模型可以分为以下几种类型:1. 线性规划模型(Linear Programming Model,简称LP):线性规划是一种优化问题,它的目标是在满足一些约束条件下,使某个线性函数取得最大或最小值。
线性规划模型广泛应用于生产调度、资源分配、物流运输等领域。
2. 整数规划模型(Integer Programming Model,简称IP):整数规划是线性规划的扩展,它要求决策变量只能取整数值。
整数规划模型常用于生产调度、排产计划、网络设计等问题。
3. 非线性规划模型(Nonlinear Programming Model,简称NLP):非线性规划是一种优化问题,它的目标函数和约束条件都可以是非线性的。
非线性规划模型广泛应用于经济学、金融学、工程学等领域。
4. 动态规划模型(Dynamic Programming Model,简称DP):动态规划是一种优化方法,它将一个复杂问题分解为若干个子问题,并逐步求解这些子问题。
动态规划模型常用于生产调度、资源分配、投资决策等问题。
5. 排队论模型(Queuing Theory Model,简称QT):排队论是一种研究等待线性的数学理论,它可以用来描述和分析顾客到达、服务时间、系统容量等因素对系统性能的影响。
排队论模型广泛应用于交通运输、通信网络、医疗卫生等领域。
6. 决策树模型(Decision Tree Model,简称DT):决策树是一种分类和回归的方法,它可以将一个问题分解为若干个子问题,并逐步求解这些子问题。
决策树模型常用于金融风险评估、医学诊断、市场营销等领域。
总之,不同类型的运筹学模型适用于不同的问题领域和求解目标,选择合适的模型可以帮助我们更好地解决实际问题。
第6讲整数规划、非线性规划模型
一、模型准备 该问题是在原料数量一定的限制条件下,求商店生产三种口味 蛋糕各多少时,可获得最大收益. 二、模型假设 1.假设在生产过程中没有材料的浪费. 2. 假设生产的面包能全部售出, 且不考虑影响销售价格的因素. 三、变量假设 设商店生产草莓、蓝莓、柠檬三种口味的蛋糕的数量分别为
x1 , x2 , x3 ,获得的总收益为 R 元.
x=intvar(1,2); C=[240 378]; a=[1 0;0 1;1 1];b=[8 6 10]; f=C*x'; F=set(0<=x<=inf); F=F+set(a*x'<=b')+set(96*x(1)+120*x(2)>=720); solvesdp(F,f) double(f)
double(x)
整
数
规
划
最优化问题中的所有变量均为整数时,这类 问题称为整数规划问题。
如果线性规划中的所有变量均为整数时,称 这类问题为线性整数规划问题。 整数规划可分为线性整数规划和非线性整数 规划 ,以及混合整数规划等。 如果决策变量的取值只能为0或1,则这样的 规划问题称为0-1规划。
double(f)
double(x)
非线性规划
非线性规划问题的一般数学模型:
min
f ( x) h j ( x) 0, j 1, 2, , l.
s.t. gi ( x) 0, i 1, 2,, m,
其中, x E n ,
f (x) 为目标函数,
g i ( x), h j ( x) 为约束函数,这些函数中至少有
最优化模型(2)
一、一般的线性规划模型 二、整数规划模型
非线性规划模型

进行分配,因而存在部分 DVD 的两次被租赁,但因为是处理 同一份订单,因而不存在会员的第二次租赁.
基于这个假设,为了最小化购买量,我们在允许当 前某些会员无法被满足租赁要求,让其等待,利用部分 会员还回的 DVD 对其进行租赁.
根据问题一,我们认为,一个月中每张 DVD 有 0.6 的概率被租赁两次,0.4 的概率被租赁一次。即在二次 租赁的情况下,每张 DVD 相当于发挥了0.6 2 0.4 1.6张 DVD 的作用.
hi
第i种油的每单位的存储费用
ti
第i种油的每单位的存储空间
T
总存储公式
由历史数据得到的经验公式为 :
min
f
(x1, x2 )
a1b1 x1
h1x1 2
a2b2 x2
h2 x2 2
s.t. g(x1, x2 ) t1x1 t2x2 T
且提供数据如表5所示:
表5 数据表
石油的
例 8.(生产计划问题)某厂生产三种布料 A1, A2, A3, 该厂两班生产,每周生产时间为 80h,能耗不得超过 160t 标准煤,其它数据如下表:
布料 生产数量( m/ h ) 利润( 元 / m)
A1
400
0.15
A2
510
0.13
A3
360
0.20
最大销售量( m / 周) 40000 51000 30000
种类
ai
bi
hi
ti
1
9
3
0.50
2
2
4
5
0.20
4
已知总存储空间 T 24
代入数据后得到的模型为:
min
f
(x1, x2 )
三、非线性规划模型实例
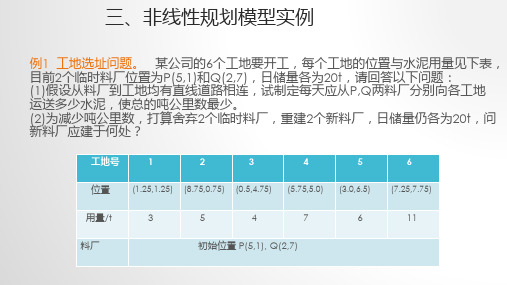
(2)建立模型。
2 2 2 2 min f c ( 5 a ) +( 1 b ) + (2 a ) (7 b ) 目标函数 i1 i i i i i 1 i 1
6
6
约束条件: (1)每个工地水泥需求量一定:ci1 ci 2
di
(2)料厂日储水泥量一定,所以每个料厂的供给有限制:
三、非线性规划模型实例
例1 工地选址问题。 某公司的6个工地要开工,每个工地的位置与水泥用量见下表, 目前2个临时料厂位置为P(5,1)和Q(2,7),日储量各为20t,请回答以下问题: (1)假设从料厂到工地均有直线道路相连,试制定每天应从P,Q两料厂分别向各工地 运送多少水泥,使总的吨公里数最少。 (2)为减少吨公里数,打算舍弃2个临时料厂,重建2个新料厂,日储量仍各为20t,问 新料厂应建于何处?
综合得非线性模型:
min f cij ( x j ai ) 2 ( y j bi ) 2
j 1 i 1
2
6
ci1 ci 2 di , i 1, 2, 6 6 s.t. cij e j , j 1, 2; cij 0 i 1
(3)模型求解。
00
劳动时间/h
280
250
400
60000
利润/万元
2
3
4
小型
钢材/t 劳动时间/h 利润/万元 1.5 280 2
中型
3 250 3
大型
5 400 4
现有量
600 60000
设每月生产小、中、大型汽车的数量分别为 x1 , x2 , x3 , 工厂的月利润为z, 建立如下模型:
工地号 位置 用量/t 料厂 1
2022年Python数学实验与建模第3章 非线性规划

航空基础学院数学第教8研页室
数学建模算法与应用
第3章 非线性规划
定理 3.2(无约束优化问题有局部最优解的充分 条件) 设 f (x)具有连续的二阶偏导数,点 x*满足 f ( x* ) 0;并且2 f ( x* )为正定阵,则 x*为无约束优
化问题的局部最优解。
定理 3.1 和定理 3.2 给出了求解无约束优化问题 的理论方法,但困难的是求解方程f ( x* ) 0,对于 比较复杂的函数,常用的方法是数值解法,如最速降 线法、牛顿法和拟牛顿法等。
航空基础学院数学第教3研页室
数学建模算法与应用
第3章 非线性规划
定义 3.1 记非线性规划问题(3.1)或(3.2)的可行
域为 K。
(1)若 x* K ,且x K ,都有 f ( x* ) f ( x), 则称 x*为(3.1)或(3.2)的全局最优解,称 f ( x*)为其全 局最优值。如果x K , x x*,都有 f ( x*) f ( x), 则称 x*为(3.1)或(3.2)的严格全局最优解,称 f ( x*)为
若 f ( x),gi ( x),i 1,2, , p和hj ( x), j 1,2, ,q中至
少有一个是 x的非线性函数,称如下形式的数学模型:
min f ( x),
s
.
t
.
gi hj
( (
x x
) )
0, 0,
i 1,2, j 1,2,
, p, ,q
(3.1)
航空基础学院数学第教1研页室
若 x*是问题(3.4)的局部最优解,则存在实向量
λ* [1* , 2* ,
,q* ]T Rq,使得L( x*, λ* ) 0,即
航空基础学院数学第教11研页室
非线性规划模型

非线性规划模型在上一次作业中,我们对线性规划模型进行了相应的介绍及优缺点,然而在实际问题中并不是所有的问题都可以利用线性规划模型求解;实际问题中许多都可以归结为一个非线性规划问题,即如果目标函数和约束条件中包含有非线性函数,则这样的问题称为非线性规划问题;一般来说,解决非线性的问题要比线性的问题难得多,不像线性规划有适用于一般情况的单纯形法;对于线性规划来说,其可行域一般是一个凸集,只要存在最优解,则其最优解一定在可行域的边界上达到;对于非线性规划,即使是存在最优解,却是可以在可行域的任一点达到,因此,对于非线性规划模型,迄今为止还没有一种适用于一般情况的求解方法,我们在本文中也只是介绍了几个比较常用的几个求解方法;一、非线性规划的分类1无约束的非线性规划当问题没有约束条件时,即求多元函数的极值问题,一般模型为此类问题即为无约束的非线性规划问题无约束非线性规划的解法一般迭代法即为可行方向法;对于问题()min 0x R f X X ∈⎧⎪⎨≥⎪⎩给出)(x f 的极小点的初始值)0(X ,按某种规律计算出一系列的),2,1()( =k X k ,希望点阵}{)(k X 的极限*X 就是)(x f 的一个极小点;由一个解向量)(k X 求出另一个新的解向量)1(+k X向量是由方向和长度确定的,所以),2,1()1( =+=+k P X X k k k k λ即求解k λ和k P ,选择k λ和k P 的原则是使目标函数在点阵上的值逐步减小,即 检验}{)(k X 是否收敛与最优解,及对于给定的精度0>ε,是否ε≤∇+||)(||1k X f ; 一维搜索法当用迭代法求函数的极小点时,常常用到一维搜索,即沿某一已知方向求目标函数的极小点;一维搜索的方法很多,常用的有:1试探法“成功—失败”,斐波那契法,法等;2插值法抛物线插值法,三次插值法等;3微积分中的求根法切线法,二分法等;考虑一维极小化问题若)(t f 是],[b a 区间上的下单峰函数,我们介绍通过不断地缩短],[b a 的长度,来搜索得)(min t f b t a ≤≤的近似最优解的两个方法;通过缩短区间],[b a ,逐步搜索得)(min t f bt a ≤≤的最优解*t 的近似值选择一个使函数值下降速度最快的的方向;把)(x f 在)(k X 点的方向导数最小的方向作为搜索方向,即令)(k k X f P -∇=.计算步骤:1选定初始点0X 和给定的要求0>ε,0=k ;2若ε<∇||)(||k X f ,则停止计算,k X X =*,否则)()(k k X f P -∇=; 3在)(k X 处沿方向)(k P 做一维搜索得1,)1(+=+=+k k P X X k k k k 令λ,返回第二步,直到求得最优解为止.可以求得:共轭梯度法可以得到——能够证明向量——是线性无关的,且关于A 是两两共轭的;从而可得到——,则——为——的极小点;计算步骤:1对任意初始点n E X ∈)1(和向量)()1()1(X f P -∇=,取;1=k2若0)()(=∇k X f ,即得到最优解,停止计算,否则求3令1+=k k ;返回2对于问题:由,0)(=+=∇B AX X f 则由最优条件,0)(=∇X f 当A 为正定时,1-A 存在,于是有B A X 1*--=为最优解 对于一般的二阶可微函数)(X f ,在)(k X 点的局部有当)()(2k X f ∇正定时,也可用上面的牛顿法,这就是拟牛顿法;计算步骤:(1)任取n E X ∈)1(,;1=k2计算)()(k k X f g ∇=,若0=k g ,则停止计算,否则计算)()()(2k k X f X H ∇=,令k k k k g X H X X 1)1())((-+-=;3令1+=k k ;返回22有约束的非线性规划非线性规划的最优性条件若*X 是非线性问题中的极小点,且对点*X 有效约束的梯度线性无关,则必存在向量()****12,,,Tm γγγΓ=使下述条件成立: 此条件为库恩-塔克条件K-T 条件,满足K-T 条件的点也称为K-T 点;K-T 条件是非线性规划最重要的理论基础,是确定某点是否为最优解的必要条件,但不一定是充要条件;对于凸规划它一定是充要条件;非线性规划的可行方向法由于线性规划的目标函数为线性函数,可行域为凸集,因而求出的最优解就是整个可行域上的全局最优解;非线性规划却不然,有时求出的某个解虽是一部分可行域上的极值点,但并不一定是整个可行域上的全局最优解;假设()kX 非线性规划问题中的一个可行解,但不是最优解,为了进一步寻找最优解在它的可行下降方向中选取其中一个方向()kD ,并确定最佳步长k λ,使得 反复进行这一过程,直到得到满足精度要求为止,这种方法称为可行方向法,也称迭代法;有约束非线性规划的解法外点法1对于等式约束问题做辅助函数如果最优解*X 满足或近似满足,),,2,1(0)(*m j X h i ==则*X 就是问题的最优解或近似解2对于不等式约束问题做辅助函数求),(min 2M X P X. 3对于一般问题做辅助函数求解),(min 3M X P X内点法内点法是在可行域内进行得,并一直保持在可行域内进行搜索,只适用于不等式约束的问题辅助函数:X 趋于R 的边界时,使)(X B 趋向于正无穷,)(X B 的常用形式 求解},,2,1,0)(|{),(min 00m j X g X R r X Q j R X =>=∈二.非线性规划的缺陷不足 算法 优点 缺点梯度法 计算量小,存储变量较少,初始点要求不高 初值依赖,收敛慢,最速下降法适用于寻优过程的前期迭代或作为间插步骤,越接近极值点时,收敛熟读越慢,后期宜选用收敛快的算法 牛顿法 收敛速度很快 当维数较高时,计算的工作量很大,初值依赖,当初值选择不好时,有可能计算出现异常,导致迭代无法进行,该法需要修正拟牛顿法 收敛速度快,避免牛顿矩阵求逆运算,算法更稳定 初值依赖程度相对牛顿法减弱,但仍然存在。
非线性规划
非线性规划什么是非线性规划?非线性规划(Nonlinear Programming,简称NLP)是一种数学优化方法,用于求解包含非线性约束条件的优化问题。
与线性规划不同,非线性规划中的目标函数和约束条件都可以是非线性的。
非线性规划的数学表达式一般来说,非线性规划可以表示为以下数学模型:minimize f(x)subject to g_i(x) <= 0, i = 1, 2, ..., mh_j(x) = 0, j = 1, 2, ..., px ∈ R^n其中,f(x)是目标函数,g_i(x)和h_j(x)分别是m个不等式约束和p个等式约束,x是优化变量,属于n维实数空间。
非线性规划的解法由于非线性规划问题比线性规划问题更为复杂,因此解决非线性规划问题的方法也更多样。
以下列举了几种常用的非线性规划求解方法:1. 数值方法数值方法是最常用的非线性规划求解方法之一。
它基于迭代的思想,通过不断优化目标函数的近似解来逼近问题的最优解。
常见的数值方法有梯度下降法、牛顿法、拟牛顿法等。
2. 优化软件优化软件是一类针对非线性规划问题开发的专用软件,它集成了各种求解算法和优化工具,可以方便地求解各种类型的非线性规划问题。
常见的优化软件有MATLAB、GAMS、AMPL等。
3. 线性化方法线性化方法是一种将非线性规划问题转化为等价的线性规划问题的求解方法。
它通过线性化目标函数和约束条件,将非线性规划问题转化为线性规划问题,然后利用线性规划的求解方法求解得到最优解。
4. 分类方法分类方法是一种将非线性规划问题分解为若干个子问题求解的方法。
它将原始的非线性规划问题分解为多个子问题,然后将每个子问题分别求解,并逐步逼近原始问题的最优解。
以上仅是非线性规划求解方法的一小部分,实际上还有很多其他的方法和技巧可供选择。
在实际应用中,选择合适的方法和工具是非常重要的。
非线性规划的应用非线性规划在实际生活和工程中有着广泛的应用。
数模(非线性规划模型)

{
}
( )
( )
( )
( )
6
非现性规划的基本概念 定义 如果目标函数或约束条件中至少有一个是非线性函数 时的最优化问题就叫做非线性规划问题. 时的最优化问题就叫做非线性规划问题. 一般形式: 一般形式:
min f ( X )
gi ( X ) ≥ 0 i = 1,2,..., m; s.t. (1) h j ( X ) = 0 j = 1,2,..., l. f 其中 X = (x1, x2 ,L, xn )T ∈ E n , , gi , h j 是定义在 En 上的实值函
14
定义
设X ⊂ R n , x∈ X , p∈ R n , p ≠ 0,若存在 t > 0,使得
x + tp∈ X
则称向量 p是点 x处 的可行方向。 关于 X 的可行方向。
解非线性规划问题, 解非线性规划问题,关键在于 找到某个方向, 找到某个方向,使得在此方向 上,目标函数得到下降,同时 目标函数得到下降, 还是可行方向。 还是可行方向。 这样的方向称为可行下降方向。 这样的方向称为可行下降方向。
{
}
( )
( )
( )
( )
8
三. 非线性规划的图解法
线性规划问题: 用图解法求解下面的非 线性规划问题: min s .t .
2 2 f ( x1,x2 ) = x1 + x2
1- x1 − x2 ≤ 0 x1 − 1 ≤ 0 x2 − 1 ≤ 0
9
三角形表示的是可行域。 三角形表示的是可行域。 同心圆表示的是目标函数的等值 线。 最优解为( , ) 最优解为(1/2,1/2) 最优值为1/2 最优值为 1/2 1/2
非线性规划模型
Fun.m 文件要同时给出目标函数f和约束条件g。形式为 [f,g]=fun(x); x0为迭代初值; opt为算法选择; v1为下界;v2为上界; grad.m文件要(用分析法)同时给出目标函数f和约束条 件g的梯度,形式为[df,dg]=fun(x);g和dg的表达形式请 见下例:
2:例:研究:
2 6
2 目标函数为(总吨千米 数) :
min f cij
j 1 i 1
x
j
ai y j bi 3
2 2
(3)约束条件 : 各工地日用量必须满足 :
c
j 1
2
ij
d i , i 1, ,6 4
各料场运送量不能超过 日储量, 所以 :
1 2 3 4 1.25 8.75 0.5 5.75 1.25 0.75 4.75 5 3 5 4 7 工地位置(a,b)及水泥日用量 d 5 3 6.5 6 6 7.25 7.25 11
a b c
解:(1)假设变量:
• • • • 记(ai ,bi)为6个工地位置,i=1,……,6; di为6个工地位置的水泥日用量; 料场位置(xj ,yj),日储量为ej,j=1,2; 从料场j向工地i运送量为cij
3:对有不等式约束的(8);可讨论其约束条件
a1 b1 a1 x b1 Ax b x a b a x b m m m m
把其中起约束的不等式改为不等式,不起约束的不等式 去掉,化为等式约束的二次规划求解。称为有效集 法。
3:例:求解:
2 2 min f ( x1 , x2 ) x1 2 x1 x2 2 x2 4 x1 12x2
非线性规划模型
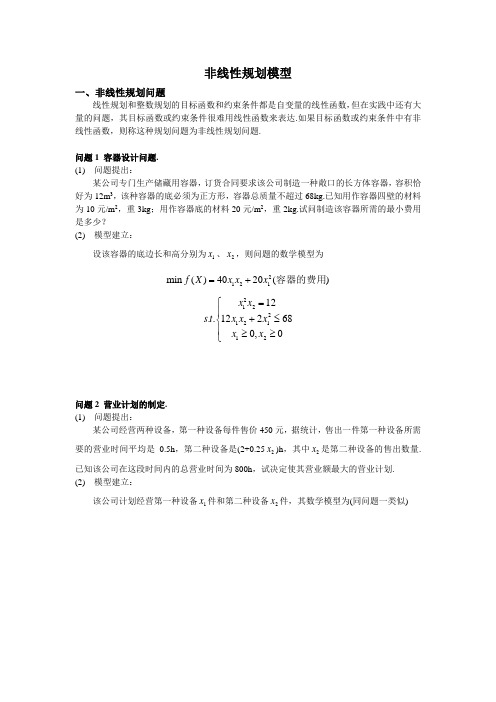
非线性规划模型一、非线性规划问题线性规划和整数规划的目标函数和约束条件都是自变量的线性函数,但在实践中还有大量的问题,其目标函数或约束条件很难用线性函数来表达.如果目标函数或约束条件中有非线性函数,则称这种规划问题为非线性规划问题.问题1 容器设计问题.(1) 问题提出:某公司专门生产储藏用容器,订货合同要求该公司制造一种敞口的长方体容器,容积恰好为12m 3,该种容器的底必须为正方形,容器总质量不超过68kg.已知用作容器四壁的材料为10元/m 2,重3kg ;用作容器底的材料20元/m 2,重2kg.试问制造该容器所需的最小费用是多少?(2) 模型建立:设该容器的底边长和高分别为1x 、2x ,则问题的数学模型为2121min ()4020()f X x x x =+容器的费用21221211212..122680,0x x s t x x x x x ⎧=⎪+≤⎨⎪≥≥⎩问题2 营业计划的制定.(1) 问题提出:某公司经营两种设备,第一种设备每件售价450元,据统计,售出一件第一种设备所需要的营业时间平均是0.5h ,第二种设备是(2+0.252x )h ,其中2x 是第二种设备的售出数量.已知该公司在这段时间内的总营业时间为800h ,试决定使其营业额最大的营业计划.(2) 模型建立:该公司计划经营第一种设备1x 件和第二种设备2x 件,其数学模型为(同问题一类似)二、非线性规划问题的数学模型非线性规划问题的数学模型常表示成以下形式:min(max)()f X 或()0(1,2,,)..()(0)(1,2,,)i i h X i m s t g X i n ==⎧⎨≥≤=⎩或其中,12(,,,),()n X x x x f X =为目标函数,()0()0i i h X X =≥和g 为约束条件.训练题某厂向用户提供发动机,合同规定,第一、二、三季度末分别交货40台、60台、80台.每季度的生产费用为()2f x ax bx =+(单位:元), 其中x 是该季度生产的台数.若交货后有剩余,可用于下季度交货,但需支付存储费,每台每季度c 元.已知工厂每季度最大生产能力为100台,第一季度开始时无存货,设a=50、b=0.2、c=4,问:工厂应如何安排生产计划,才能既满足合同又使总费用最低.讨论a 、b 、c 变化对计划的影响,并作出合理的解释.。
数学建模---非线性规划模型
6.4.3 问题的分析
i i i i i i i
当购买Si的金额为xi(i=0~n),投资组合 x=(x0,x1,…,xn)的净收益总额
R( x) Ri ( xi )
n i 0
(6 )
整体风险:
Q( x) max Qi ( xi )
资金约束:
1i n
n
(7)
(8 )
F ( x) f i ( xi ) M
二、多目标规划模型 多目标规划模型的一般形式为
min f1 x , f 2 x , , f p x gi x 0, i 1, 2,....., m s.t. h j x 0, j 1, 2,....., l
T
5.7
2.7 4.5 7.6
320
267 328 131
模型的假设
1. 2.
3.
4.
在一个时期内所给出的ri,qi,pi保持不变。 在一个时间内所购买的各种资产(如股票、 证券等)不进行买卖交易,即在买入后不再 卖出。 每种投资是否收益是相互独立的。 在投资过程中,无论盈利与否必须先付交易 费。
符号的说明
表1
售价(元) 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 41000 38000 34000 32000 29000 28000 25000 22000 20000
非线性规划建模、图解法

z f ( x1 , x2 ) L zc f ( x1 , x2 ) c L z0
z
0
x1
x2
L 目标函数的等高线
线性规划3-1 规划与决策
二.图解法 (只用于求解两个变量的非线性规划问题) 2.画出目标函数的等高线: 例:在 x1 , x2 坐标平面上画出目标函数: 2 f ( x1 , x2 ) x12 x2 的等高线 x2 2 2 解: 等高线为 x1 x2 c( 0) 是一族以原点为圆心的 同心圆(半径为 c )
max f ( X ) x1 x2
s .t .
2 x1 5 x2 40 x1 , x2 0
可行域:
x2
10 40 60 7
2 x1 5 x2 40 D {( x1 , x2 ) } x1 , x2 0
T
x 等高线: 1 x2 c X (10, 4 )T , f 40
0
f ( x1 , x2 ) c L z0
线性规划3-1 规划与决策
x1
二.图解法 (只用于求解两个变量的非线性规划问题) 3.用图解法求解 例1: 解:
min f ( X ) ( x1 2)2 ( x2 2)2
s .t . g( X ) x1 x2 6 0
一.非线性规划举例及数学模型 例1: 某公司经营两种设备,第一种设备每件售价30元,第 二种设备每件售价450元。根据统计,售出一件第一 种设备所需要的营业时间平均是0.5小时,第二种设 备是2+0.25 x2小时,其中 x2 是第二种设备的售出数 量。已知该公司在这段时间内的总营业时间为800 小时,试决定使其营业额最大的营业计划。
hi ( X ) 0 s.t. gj(X) 0
运筹学胡运权第06章

f ( X ) 2 x2 x2
令 f(X)=0,即:2x1=0和-2x2=0,得稳定点 X=(x1,x2)T=(0,0)T
(2)再用充分条件进行检验:
2 f ( X ) 2 f ( X ) 2 f ( X ) 2 f ( X ) 2 0 2 2 2 x1 x1x2 x2x1 x2 2 0 2 f ( X ) 0 2
多元 函数 极值 点存 在的 条件
二阶可微的一元函数f(x)极值点存在的条件如下: 必要条件: ( x) 0 充分条件:f对于极小点: 且 f ( x) 0 且 f ( x) 0 对于极大点: f ( x) 0 f (x) 0
对于无约束多元函数,其极值点存在的必要条件和 充分条件,与一元函数极值点的相应条件类似。
其中,R为问题的可行域。
二 维 问 题 的 图 解
当只有两个自变量时,求解非线性规划也可像 对线性规划那样借助于图解法。如以下非线性 规划问题:
min f ( X ) ( x1 2) 2 ( x2 1) 2 2 x x 1 2 5 x2 0 x1 x2 5 0 x1 x 0 1 x2 0
1 f ( X ) f ( X (0) ) f ( X (0) )T ( X X (0) ) ( X X (0) )T 2 f ( X )( X X (0) ) 2
其中,X=X(0)+θ(X-X(0)),0<θ<1
若以X=X(0)+P代入,则变为: 其中,X=X(0)+θP
其中,X=(x1,x2,…,xn)T是n维欧氏空间 En中的点(向量),目标函数f(X)和约束 函数hi(X)、gj(X)为X的实函数。
非 线 性 规 划 的 数 学 模 型
非线性多目标规划模型的建立与求解

非线性多目标规划模型的建立与求解一、绪论随着时代的发展,我国经济已经进入高速发展时期,各个行业都在迫切地需要优化自己的生产和管理模式。
而其中最重要的部分便是如何将多个目标的指标统合起来做出科学的决策。
在这种情况下,多目标规划成为了一个热门的技术,而非线性多目标规划模型更为适用于实际问题。
二、基本概念通俗地说,多目标规划便是在优化模型中不只考虑一个效益函数,而是考虑多个函数同时优化。
它的基本思想是将多个目标指标进行量化和权重分配,然后采用数学模型对这些指标进行统一的优化处理。
而非线性多目标规划模型就是在此基础上引入非线性约束的模型。
简单来说,就是指被优化的一系列目标函数和约束条件至少有一个是非线性函数的优化过程。
三、模型的建立非线性多目标规划模型的建立是一项非常关键的工作。
它不仅要考虑到多个目标的优化,还要考虑对象的多样性和求解难度。
因此,建模过程需要分为以下几步:(1)判断目标的数量和性质,确定优化的目标函数集。
(2)确定约束条件,包括等式约束条件和不等式约束条件。
同时,非线性约束条件也需要被特别考虑。
(3)确定目标函数和约束条件的权重系数。
(4)将以上条件用数学语言表示出来,构建出一个可求解的优化模型。
四、模型的求解非线性多目标规划模型的求解面临的主要问题在于约束条件多、非线性程度高、求解难度大。
为了解决这一问题,我们就需要利用一些优化算法来对模型进行求解。
目前比较常用的算法有以下几种:(1)遗传算法优点:适用于面临约束多、寻优复杂的问题;易于并行化实现。
缺点:缺少数学理论支持;参数设置对结果影响较大。
(2)蚁群算法优点:对复杂的问题具有一定的较强的全局寻优能力;可应用于连续和离散型等多种优化问题。
缺点:求解时间比较长;对问题的依赖性较强。
(3)遗传蚁群算法优点:具有强的全局搜索能力,解的质量较高;求解速度快且稳定性好。
缺点:对于变量的次序和约束的复杂性有一定的敏感度。
(4)粒子群算法优点:能够快速找到全局最优解;发现多种多样的解。
城市规划中非线性模型及其应用研究
城市规划中非线性模型及其应用研究城市规划是一项复杂而重要的工作。
城市的发展需要科学规划,否则很容易出现诸如交通堵塞、环境污染等问题。
为了有效地解决这些问题,人们开始使用各种模型进行城市规划研究。
其中,非线性模型成为了城市规划研究中备受关注的一种。
一、什么是非线性模型?首先,我们来了解一下什么是非线性模型。
在数学中,线性模型是指变量之间存在线性关系的模型,而非线性模型则是指变量之间存在非线性关系的模型。
在城市规划中,非线性模型即是指城市发展中存在非线性影响的模型。
在城市规划研究中,非线性模型通常用来分析城市发展的复杂性。
由于城市规划涉及到众多因素的影响,这些因素之间可能存在复杂的相互作用。
在这种情况下,线性模型难以捕捉到这种非线性关系,因此需要使用非线性模型进行研究。
二、在城市规划中的应用非线性模型在城市规划中的应用非常广泛。
下面,我们来看一些实际的例子。
1. 交通规划交通规划是城市规划中非常重要的一个方面。
在实际的交通规划研究中,需要考虑很多因素,如道路容量、交通信号灯、车辆密度等。
这些因素之间存在复杂的非线性关系,因此需要使用非线性模型进行分析。
2. 环境规划城市环境污染问题一直是一个严重的问题。
在环境规划研究中,需要考虑很多因素,如工业排放、交通排放、工地施工等。
这些因素之间也存在复杂的非线性关系,因此需要使用非线性模型进行研究。
3. 经济规划城市经济的发展对于城市规划来说也是非常重要的。
在经济规划研究中,需要考虑很多因素,如市场需求、行业竞争等。
这些因素之间也存在复杂的非线性关系,因此需要使用非线性模型进行研究。
三、非线性模型的优缺点非线性模型的优点在于它可以更准确地描述城市发展中的复杂性。
由于城市规划涉及到很多因素,这些因素之间可能存在复杂的相互作用。
使用非线性模型能够更好地捕捉这种非线性关系,从而更准确地预测城市未来的发展趋势。
然而,非线性模型也存在一些缺点。
首先,非线性模型通常比线性模型更复杂,需要更多的数据和计算资源。
几种常见的决策模型
几种常见的决策模型决策模型是指用于建立决策过程和辅助决策的数学模型。
常见的决策模型有多种,下面将介绍其中几种常见的决策模型。
1. 线性规划模型(Linear Programming):线性规划是一种常见的优化方法,用于在给定的约束条件下寻找线性目标函数的最优解。
线性规划模型适用于许多实际问题,如生产计划、资源分配等。
该模型的数学表达式为最大化或最小化目标函数,同时满足一系列线性等式或不等式约束。
2. 多目标决策模型(Multi-objective Decision Model):多目标决策模型是用于处理多个相互矛盾目标的决策问题。
在多目标决策模型中,决策者需要权衡各个目标之间的优先级,并找到一个最优解或一组最优解。
方法包括权重法、直接偏好法和效用函数法等。
3. 非线性规划模型(Nonlinear Programming):非线性规划模型是一种考虑非线性目标函数和非线性约束条件的优化方法。
这种模型适用于许多实际问题,如供应链优化、投资组合优化等。
非线性规划模型需要使用数值优化算法进行求解。
4. 随机决策模型(Stochastic Decision Model):随机决策模型是用于处理存在不确定性和风险的决策问题。
该模型考虑到不同决策结果的概率分布,并使用概率统计方法评估各个决策的风险。
常见的方法包括决策树、马尔可夫链和蒙特卡洛模拟等。
5. 排队论模型(Queueing Theory Model):排队论模型是一种用于分析和优化排队系统的数学模型。
排队论模型可以用于评估系统性能指标,如平均等待时间、平均队长等,并提供决策者关于系统优化的建议。
排队论模型广泛应用于运输、通信、服务等领域。
6. 博弈论模型(Game Theory Model):博弈论模型是一种用于分析决策者之间互动行为的数学模型。
博弈论模型主要研究决策者在决策过程中的策略选择和利益分配,并研究在不同策略组合下的最优解。
博弈论模型适用于许多领域,如经济学、管理学和政治学等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非线性规划模型
在上一次作业中,我们对线性规划模型进行了相应的介绍及优缺点,然而在实际问题中并不是所有的问题都可以利用线性规划模型求解。
实际问题中许多都可以归结为一个非线性规划问题,即如果目标函数和约束条件中包含有非线性函数,则这样的问题称为非线性规划问题。
一般来说,解决非线性的问题要比线性的问题难得多,不像线性规划有适用于一般情况的单纯形法。
对于线性规划来说,其可行域一般是一个凸集,只要存在最优解,则其最优解一定在可行域的边界上达到;对于非线性规划,即使是存在最优解,却是可以在可行域的任一点达到,因此,对于非线性规划模型,迄今为止还没有一种适用于一般情况的求解方法,我们在本文中也只是介绍了几个比较常用的几个求解方法。
一、非线性规划的分类
1 无约束的非线性规划
当问题没有约束条件时,即求多元函数的极值问题,一般模型为
此类问题即为无约束的非线性规划问题
1.1 无约束非线性规划的解法
1.1.1 一般迭代法
min f X
即为可行方向法。
对于问题x R
X0
给出f(x)的极小点的初始值X(0),按某种规律计算出一系列的X (k) (k 1,2,),希望点
阵{X(k)}的极限X就是f (x)的一个极小点。
由一个解向量X(k)求出另一个新的解向量x(k1)
向量是由方向和长度确定的,所以X(k1) X k k P k(k 1,2, )
即求解k和P k,选择k和P k的原则是使目标函数在点阵上的值逐步减小,即
检验{ X (k)}是否收敛与最优解,及对于给定的精度0,是否|| f(X k1)|| 。
1.1.2 一维搜索法
当用迭代法求函数的极小点时,常常用到一维搜索,即沿某一已知方向求目标函数的极小点。
一维
搜索的方法很多,常用的有:
(1)试探法(“成功一失败”,斐波那契法,0.618法等);
(2)插值法(抛物线插值法,三次插值法等);
(3)微积分中的求根法(切线法,二分法等)。
考虑一维极小化问题
若f (t)是[a,b]区间上的下单峰函数,我们介绍通过不断地缩短[a,b]的长度,来搜索得min f (t)的近似最优解的两个方法。
通过缩短区间[a,b],逐步搜索得min f (t)的最优解t a t b a t b 的近似值
选择一个使函数值下降速度最快的的方向。
把f(x)在X(k)点的方向导数最小的方向
作为搜索方向,即令P k f(x k).
计算步骤:
(1)选定初始点X0和给定的要求0,
k 0 ;
(2)若II f(X k)|| ,则停止计算,X* X k,否则P(k) f(X k);
(3)在X(k)处沿方向P(k)做一维搜索得X(k 1) X k k P k,令k k 1,
返回第二步,直到求得最优解为止.可以求得:
2.1.4共轭梯度法
又称共轭斜量法,仅适用于正定二次函数的极小值问题:
A为n n阶实对称正定阵X,B E n,c为常数
从任意初始点X⑴和向量P(1) f(X⑴)出发,由
(2)若f(X (k)) 0,即得到最优解,停止计算,否则求
(3 )令 k k 1;返回(2)
对于问题:
由f(X) AX B 0,则由最优条件 f (X) 0,当A 为正定时,A 1存在,于是有X * 为最优解
对于一般的二阶可微函数f (X ),在X (k)点的局部有
当2f(X (k))正定时,也可用上面的牛顿法,这就是拟牛顿法。
计算步骤:
(1) 任取 X ⑴ E n ,k 1;
(2) 计算g k f(X (k)),若g k 0 ,贝M 亭止计算,否则计算 H(X k ) 2f(X X (k 1) X k (H(X k )) 1g k ;
(3) 令 k k 1;返回(2)
2有约束的非线性规划
2.1非线性规划的最优性条件
若X 是非线性问题中的极小点,且对点 X 有效约束的梯度线性无关,则必存在 P (k 1) 和P f (X (k 1)) P (k ) k f(X (k °) A (P (k))T
(p (k ))T AP (k)
(k 1,2, ,n 1)
可以得到一一能够证明向量一一是线性无关的, ——的极小点。
且关于A 是两两共轭的。
从而可得到 则——为 计算步骤:
(1)对任意初始点X ⑴ E n 和向量P ⑴ f (X ⑴),取 k 1;
A 1
B (k)),令
向量*1*, 2*,L , *m使下述条件成立:
此条件为库恩-塔克条件(K-T条件),满足K-T条件的点也称为K-T点。
K-T 条件是非线性规划最重要的理论基础,是确定某点是否为最优解的必要条件,但不
一定是充要条件。
对于凸规划它一定是充要条件。
2.2 非线性规划的可行方向法
由于线性规划的目标函数为线性函数,可行域为凸集,因而求出的最优解就是整个可行域上的全局最优解。
非线性规划却不然,有时求出的某个解虽是一部分可行域上的极值点,但并不一定是整个可行域上的全局最优解。
假设X k非线性规划问题中的一个可行解,但不是最优解,为了进一步寻找最优
解在它的可行下降方向中选取其中一个方向 D k,并确定最佳步长k,使得
反复进行这一过程,直到得到满足精度要求为止,这种方法称为可行方向法,也称迭代
法。
2.3 有约束非线性规划的解法
2.3.1 外点法
( 1 )对于等式约束问题
做辅助函数
如果最优解X满足或近似满足h i (X*) 0 (j 1,2, ,m),则X就是问题的最优解或
近似解
( 2 )对于不等式约束问题
做辅助函数
求min P2(X,M ).
X
(3)对于一般问题
做辅助函数
求解minP3 (X,M)
X
232 内点法
内点法是在可行域内进行得,并一直保持在可行域内进行搜索,只适用于不等式约束的问
题
辅助函数:
X趋于R的边界时,使B(X)趋向于正无穷,B(X)的常用形式
求解minQ(X,r) R。
{X |g j(X) 0,j 1,2, ,m}
X R。