SPI同步串行总线原理
SPI总线组成及其工作原理
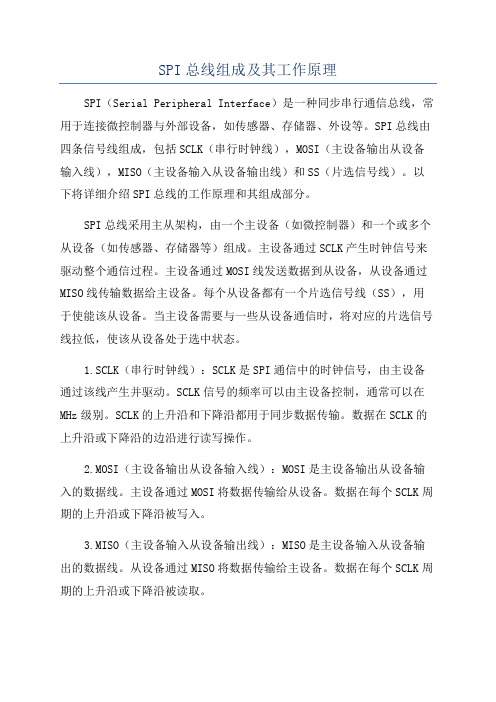
SPI总线组成及其工作原理SPI(Serial Peripheral Interface)是一种同步串行通信总线,常用于连接微控制器与外部设备,如传感器、存储器、外设等。
SPI总线由四条信号线组成,包括SCLK(串行时钟线),MOSI(主设备输出从设备输入线),MISO(主设备输入从设备输出线)和SS(片选信号线)。
以下将详细介绍SPI总线的工作原理和其组成部分。
SPI总线采用主从架构,由一个主设备(如微控制器)和一个或多个从设备(如传感器、存储器等)组成。
主设备通过SCLK产生时钟信号来驱动整个通信过程。
主设备通过MOSI线发送数据到从设备,从设备通过MISO线传输数据给主设备。
每个从设备都有一个片选信号线(SS),用于使能该从设备。
当主设备需要与一些从设备通信时,将对应的片选信号线拉低,使该从设备处于选中状态。
1.SCLK(串行时钟线):SCLK是SPI通信中的时钟信号,由主设备通过该线产生并驱动。
SCLK信号的频率可以由主设备控制,通常可以在MHz级别。
SCLK的上升沿和下降沿都用于同步数据传输。
数据在SCLK的上升沿或下降沿的边沿进行读写操作。
2.MOSI(主设备输出从设备输入线):MOSI是主设备输出从设备输入的数据线。
主设备通过MOSI将数据传输给从设备。
数据在每个SCLK周期的上升沿或下降沿被写入。
3.MISO(主设备输入从设备输出线):MISO是主设备输入从设备输出的数据线。
从设备通过MISO将数据传输给主设备。
数据在每个SCLK周期的上升沿或下降沿被读取。
4.SS(片选信号线):每个从设备都有一个对应的SS信号线。
当主设备需要与一些从设备通信时,将该从设备的SS信号线拉低,使该从设备处于选中状态。
当通信结束后,SS信号线会被拉高,表示该从设备不再被选中。
1.主设备通过控制SS信号线,选中一些从设备开始通信。
2.主设备通过SCLK产生时钟信号,并通过MOSI线发送数据给从设备。
3.从设备在SCLK的上升沿或下降沿将数据写入MISO线,传输给主设备。
SPI、I2C、UART三种串行总线的原理、区别及应用
简朴描述:SPI 和I2C这两种通信方式都是短距离旳,芯片和芯片之间或者其他元器件如传感器和芯片之间旳通信。
SPI和IIC是板上通信,IIC有时也会做板间通信,但是距离甚短,但是超过一米,例如某些触摸屏,手机液晶屏那些很薄膜排线诸多用IIC,I2C能用于替代原则旳并行总线,能连接旳多种集成电路和功能模块。
I2C是多主控总线,因此任何一种设备都能像主控器同样工作,并控制总线。
总线上每一种设备均有一种独一无二旳地址,根据设备它们自己旳能力,它们可以作为发射器或接受器工作。
多路微控制器能在同一种I2C总线上共存这两种线属于低速传播;ﻫ而UART是应用于两个设备之间旳通信,如用单片机做好旳设备和计算机旳通信。
这样旳通信可以做长距离旳。
UART和,UART就是我们指旳串口,速度比上面三者快,最高达100K左右,用与计算机与设备或者计算机和计算之间通信,但有效范畴不会很长,约10米左右,UART长处是支持面广,程序设计构造很简朴,随着USB旳发展,UART也逐渐走向下坡;SmBus有点类似于USB设备跟计算机那样旳短距离通信。
ﻫ简朴旳狭义旳说SPI和I2C是做在电路板上旳。
而UART和SMBUS是在机器外面连接两个机器旳。
具体描述:1、UART(TX,RX)就是两线,一根发送一根接受,可以全双工通信,线数也比较少。
数据是异步传播旳,对双方旳时序规定比较严格,通信速度也不是不久。
在多机通信上面用旳最多。
2、SPI(CLK,I/O,O,CS)接口和上面UART相比,多了一条同步时钟线,上面UART旳缺陷也就是它旳长处了,对通信双方旳时序规定不严格不同设备之间可以很容易结合,并且通信速度非常快。
一般用在产品内部元件之间旳高速数据通信上面,如大容量存储器等。
3、I2C(SCL,SDA)接口也是两线接口,它是两根线之间通过复杂旳逻辑关系传播数据旳,通信速度不高,程序写起来也比较复杂。
一般单片机系统里重要用来和24C02等小容易存储器连接。
spi原理
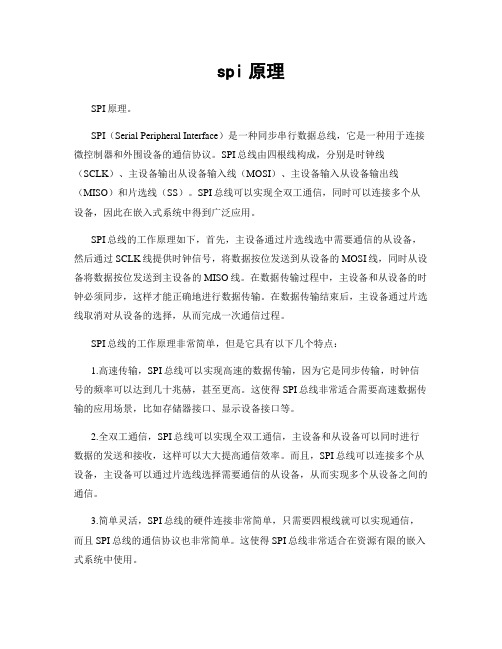
spi原理SPI原理。
SPI(Serial Peripheral Interface)是一种同步串行数据总线,它是一种用于连接微控制器和外围设备的通信协议。
SPI总线由四根线构成,分别是时钟线(SCLK)、主设备输出从设备输入线(MOSI)、主设备输入从设备输出线(MISO)和片选线(SS)。
SPI总线可以实现全双工通信,同时可以连接多个从设备,因此在嵌入式系统中得到广泛应用。
SPI总线的工作原理如下,首先,主设备通过片选线选中需要通信的从设备,然后通过SCLK线提供时钟信号,将数据按位发送到从设备的MOSI线,同时从设备将数据按位发送到主设备的MISO线。
在数据传输过程中,主设备和从设备的时钟必须同步,这样才能正确地进行数据传输。
在数据传输结束后,主设备通过片选线取消对从设备的选择,从而完成一次通信过程。
SPI总线的工作原理非常简单,但是它具有以下几个特点:1.高速传输,SPI总线可以实现高速的数据传输,因为它是同步传输,时钟信号的频率可以达到几十兆赫,甚至更高。
这使得SPI总线非常适合需要高速数据传输的应用场景,比如存储器接口、显示设备接口等。
2.全双工通信,SPI总线可以实现全双工通信,主设备和从设备可以同时进行数据的发送和接收,这样可以大大提高通信效率。
而且,SPI总线可以连接多个从设备,主设备可以通过片选线选择需要通信的从设备,从而实现多个从设备之间的通信。
3.简单灵活,SPI总线的硬件连接非常简单,只需要四根线就可以实现通信,而且SPI总线的通信协议也非常简单。
这使得SPI总线非常适合在资源有限的嵌入式系统中使用。
在实际的应用中,为了提高SPI总线的稳定性和可靠性,通常会在硬件上添加一些额外的电路,比如加上电平转换器、添加阻抗匹配电路等。
而在软件上,通常会使用专门的SPI驱动程序来控制SPI总线的通信,以便更加方便地使用SPI总线进行数据传输。
总的来说,SPI总线是一种非常简单、灵活、高效的通信协议,它在嵌入式系统中得到了广泛的应用。
SPI工作原理

SPI∙由于SPI(setial peripheralinterface)总线占用的接口线少,通信效率高,并且支持大部分处理器芯片,因而是一种理想的选择。
SPI是利用4根信号线进行通信的串行接口协议,包括主/从两种模式。
4个接口信号为:串行数据输入(MISO,主设备输入、从设备输出)、串行数据输出(MOSI,主设备输出、从设备输入)、移位时钟(SCK)、低电平有效的从设备使能信号(cs)。
SPI最大的特点是由主设备时钟信号的出现与否来确定主/从设备间的通信。
一旦检测到主设备的时钟信号,数据开始传输。
∙目录∙SPI工作方式简介∙SPI的数据传输∙SPI用户逻辑∙SPI基本原理与结构SPI工作方式简介∙SPI是由美国摩托罗拉公司最先推出的一种同步串行传输规范,也是一种单片机外设芯片串行扩展接口。
SPI模式可以允许同时同步发送和接收8位数据,并支持4种工作方式:1. 串行数据输出,对应RC5/SDO引脚;2. 串行数据输入,对应RC4/SDI/SDA引脚;3. 串行时钟,对应RC3/SCK/SCL引脚;4. 从动方式选择,对应RA5/SS/AN4引脚。
SPI模式下与之相关的寄存器有10个,其中4个是与I2C模式共用的。
图1所示是由一个主机对接一个从机进行全双工通信的系统构成的方式。
在该系统中,由于主机和从机的角色是固定不变的,并且只有一个从机,因此,可以将主机的丽端接高电平,将从机的SS 端固定接地。
图1 全双工主机/从机连接方法若干个具备SPI接口的单片机和若干片兼容SPI接口的外围芯片,可以在软件的控制下,构成多种简单或者复杂的应用系统,例如以下3种。
(1)一个主机和多个从器件的通信系统。
如图2所示,各个从器件是单片机的外围扩展芯片,它们的片选端SS分别独占单片机的一条通用I/O引脚,由单片机分时选通它们建立通信。
这样省去了单片机在通信线路上发送地址码的麻烦,但是占用了单片机的引脚资源。
当外设器件只有一个时,可以不必选通而直接将SS端接地即可。
SPII2CUART三种串行总线的原理区别及应用
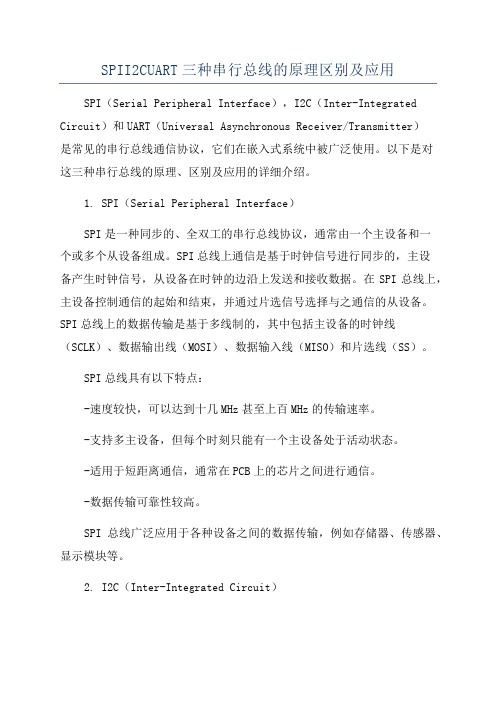
SPII2CUART三种串行总线的原理区别及应用SPI(Serial Peripheral Interface),I2C(Inter-Integrated Circuit)和UART(Universal Asynchronous Receiver/Transmitter)是常见的串行总线通信协议,它们在嵌入式系统中被广泛使用。
以下是对这三种串行总线的原理、区别及应用的详细介绍。
1. SPI(Serial Peripheral Interface)SPI是一种同步的、全双工的串行总线协议,通常由一个主设备和一个或多个从设备组成。
SPI总线上通信是基于时钟信号进行同步的,主设备产生时钟信号,从设备在时钟的边沿上发送和接收数据。
在SPI总线上,主设备控制通信的起始和结束,并通过片选信号选择与之通信的从设备。
SPI总线上的数据传输是基于多线制的,其中包括主设备的时钟线(SCLK)、数据输出线(MOSI)、数据输入线(MISO)和片选线(SS)。
SPI总线具有以下特点:-速度较快,可以达到十几MHz甚至上百MHz的传输速率。
-支持多主设备,但每个时刻只能有一个主设备处于活动状态。
-适用于短距离通信,通常在PCB上的芯片之间进行通信。
-数据传输可靠性较高。
SPI总线广泛应用于各种设备之间的数据传输,例如存储器、传感器、显示模块等。
2. I2C(Inter-Integrated Circuit)I2C也是一种同步的、双向的串行总线协议,由一个主设备和一个或多个从设备组成。
I2C总线上的通信也是基于时钟信号进行同步的,主设备产生时钟信号和开始/停止条件,从设备在时钟边沿上发送和接收数据。
I2C总线上的数据传输是基于两根线—串行数据线(SDA)和串行时钟线(SCL)。
I2C总线具有以下特点:- 通信速度较慢,大多数设备的传输速率为100kbps,但也支持高达3.4Mbps的快速模式。
-支持多主设备,可以同时连接多个主设备。
spi通信原理
spi通信原理SPI(串行外围接口,Serial Peripheral Interface)是一种常见的半双工、同步串行通信总线接口(bus interface)。
它由一个正极性信号线(CS,Chip Select),一个时钟信号线(SCK,Serial Clock),一个向下发出数据线(MOSI,Master Out-Slave In)和一个向上接收数据线(MISO,Master In-Slave Out)构成,可用于微分模式或模拟模式通信,且具有较高的数据传输率和节点连线数,是一种主从(Master-Slave)式的串行数据传输标准。
一、SPI通信原理1、工作模式SPI接口通信模式有三种,分别是主模式(Master Mode)、从模式(Slave Mode)和双向模式(Bi-directional Mode),根据两个彼此连接的电路是主端还是从端,其工作模式就可以分别确定。
(1)主模式主模式有总线的控制权,它是总线的主导者,其发送时钟信号控制总线,由它读取从模式器件入端口的字节数据或者写入数据到从模式器件出端口,它一般兼顾发送和接收两种操作,并且在发送和接收都有数据缓存能力;(2)从模式从模式段缺少时钟和控制信号,从模式由主模式发送的时钟信号控制总线,从模式只能够等待主模式的唤醒,接收到主模式发来的时钟脉冲,才能工作;数据传输中,从模式由主模式发来的数据控制信号中控制自身的行为,从模式接收到数据,可能直接或间接地存储在从模式自身的缓冲位;(3)双向模式双向模式下,两电路当守护者和执行者双重角色,类似主模式,双向模式的总线可以实现双向同时收发数据功能,这也是SPI最重要的一个特点之一;2、信号线(1)CS: Chip Select,片选信号,由主机向从机发送,表示仪器的开始和结束信号;(2)SCK: Serial Clock,系统时钟信号,由主机向从机发送,控制数据的传输;(3)MOSI: Master Out Slave In,主机输出从机输入,由主机向从机发送;(4)MISO: Master In Slave Out,主机输入从机输出,由从机向主机发送;3、总线收发:1)主机向外设发送起始信号CS并向外设发出一个脉冲,外设将收到控制信号,从而开始读写操作;2)主机向外设发送时钟信号SCK,外设收到时钟信号后,可以进行一般主机传入和传出操作;3)主机发出信号来控制从机发出数据,从机受到数据标识,可以开始向主机发送数据,主机则接收从机发出的数据;4)当数据传送完毕后,起始信号CS将放低,SCK亦会放低,外设再将已写完信息的SS连接信号拉高;5)最后,外设会结束数据的读取和写入,同时将SS。
SPI接口的优缺点及通信原理

SPI接口的优缺点及通信原理SPI是串行外设接口(Serial Peripheral Interface)的缩写。
是一种同步串行接口技术,是高速的,全双工,同步的通信总线。
下面就有iBeacon、蓝牙模块厂家-云里物里科技来帮大家讲解下SPI接口的优缺点。
1、SPI接口的优点支持全双工操作;操作简单;数据传输速率较高。
同时,它也具有如下缺点:需要占用主机较多的口线(每个从机都需要一根片选线);只支持单个主机;没有指定的流控制,没有应答机制确认是否接收到数据。
2、SPI通信原理SPI的通信原理是以主从方式工作,这种模式通常有一个主设备和一个或多个从设备。
SPI接口经常被称为4线串行总线,分别是SDI(数据输入)、SDO(数据输出)、SCLK(时钟)、CS(片选)。
(a)SDO/MOSI–主设备数据输出,从设备数据输入;(b)SDI/MISO–主设备数据输入,从设备数据输出;(c)SCLK–时钟信号,由主设备产生;(d)CS/SS–从设备使能信号,由主设备控制。
在SPI总线上,某一时刻可以出现多个从设备,但只能存在一个主设备,主设备通过片选线来确定要通信的从设备。
这就要求从设备的MISO口具有三态特性,使得该口线在设备未被选通时表现为高阻抗。
3、数据传输在一个SPI时钟周期内,会完成如下操作:1)主设备通过MOSI线发送1位数据,从设备通过该线读取这1位数据;2)从设备通过MISO线发送1位数据,主设备通过该线读取这1位数据。
这是通过移位寄存器来实现的。
如图所示,主设备和从设备各有一个移位寄存器,且二者连接成环。
随着时钟脉冲,数据按照从高位到低位的方式依次移出主设备寄存器和从机寄存器,并且依次移入从设备寄存器和主设备寄存器。
当寄存器中的内容全部移出时,相当于完成了两个寄存器内容的交换。
4、内部工作机制SSPSR是SPI设备内部的移位寄存器(Shift Register).它的主要作用是根据SPI时钟信号状态,往SSPBUF里移入或者移出数据,每次移动的数据大小由Bus-Width以及Channel-Width所决定。
spi工作原理
spi工作原理SPI(Serial Peripheral Interface)是一种同步串行通信协议,用于连接微控制器、传感器、存储器等外部设备。
其工作原理如下:1. 通信架构:SPI使用主从架构,其中主设备(通常是微控制器或处理器)控制通信的初始化、时钟速率以及数据传输的起始和终止,而从设备(例如传感器或存储器)则被动地响应主设备的指令。
2. 时钟信号:SPI通信需要一个时钟信号作为同步基准,由主设备产生并传输给从设备。
通常情况下,SPI设备具有两个时钟极性(CPOL)和时钟相位(CPHA)设置,主设备和从设备必须使用相同的设置才能正常通信。
3. 数据传输:主设备通过SPI总线发送数据,而从设备则将其接收。
数据以字节为单位传输,可以进行全双工或半双工传输。
数据传输的方式一般为MSB(最高有效位)或LSB(最低有效位)优先。
4. 片选信号:SPI可以支持多个从设备的连接。
通过片选信号(通常称为CS或SS),主设备可以选择与哪个从设备进行通信。
只有选中的从设备会响应主设备发送的指令和数据。
5. 数据帧:SPI通信中的数据传输由一系列的数据帧组成。
每个数据帧包含一个位传输和一个字节传输,并由传输时钟控制。
6. 通信步骤:- 主设备发送片选信号以选中从设备。
- 主设备发送时钟信号作为同步时钟。
- 主设备将数据位推送到MOSI(主输出从输入)线上。
- 从设备在下降沿接收数据位,并将响应数据推送到MISO (主输入从输出)线上。
- 主设备在上升沿采集响应数据。
- 重复以上步骤直到传输完成。
总结:SPI是一种高速串行通信协议,具有灵活性和简单性。
它通过主从架构、时钟信号、数据传输、片选信号以及数据帧来实现设备之间的通信。
主设备控制通信的初始化和时序,从设备被动响应主设备的指令和数据。
通过理解SPI的工作原理,可以更好地设计和应用它。
spi总线工作原理

spi总线工作原理
SPI(Serial Peripheral Interface)总线是一种同步串行通信协议,它主要用于在微控制器或其他数字集成电路之间传输数据。
SPI总线由一个主设备(Master)和一个或多个从设备(Slave)组成。
主设备通过与从设备之间发送和接收数据的方式来与其进行通信。
SPI总线的工作原理如下:
1. 首先,主设备选择要与之通信的从设备。
这是通过在片选引脚上拉低电平来实现的。
其他从设备的片选引脚应保持高电平。
2. 接着,主设备通过时钟引脚(SCK)生成时钟信号,此时数据传输开始。
3. 主设备通过主输出(MOSI)引脚发送数据,从设备通过主输
入(MISO)引脚接收数据。
在每个时钟周期中,主设备和从设
备在SCK上的上升沿或下降沿进行数据交换。
4. 数据传输时,主设备先发送一个起始位(通常是高电平)并将其传输到从设备。
5. 接下来,主设备和从设备同时发送并接收数据,每一个时钟周期传输一个位。
数据传输的顺序是从最高位(MSB)到最
低位(LSB)。
6. 当所有数据位都传输完毕后,主设备通过拉高片选引脚结束
与从设备的通信。
7. 在通信结束后,主设备可以选择与其他从设备进行通信,或者在下一个时钟周期中重新选择与之前的从设备进行通信。
SPI总线的工作原理简单而直观。
它具有高速、可简化电路设计等优点,因此在很多嵌入式系统中得到了广泛应用。
SPI总线简介及原理
SPI总线简介及原理2009-12-29 10:52SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
SPI 接口由SDI(串行数据输入),SDO(串行数据输出),SCK(串行移位时钟),CS(从使能信号)四种信号构成,CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,则只能存在一个从设备,主设备通过产生移位时钟来发起通讯。
通讯时,数据由SDO 输出,SDI 输入,数据在时钟的上升或下降沿由SDO 输出,在紧接着的下降或上升沿由SDI 读入,这样经过8/16 次时钟的改变,完成8/16 位数据的传输。
SPI通信该总线通信基于主-从配置。
它有以下4个信号:MOSI:主出/从入MISO:主入/从出SCK:串行时钟SS:从属选择芯片上“从属选择”(slave-select)的引脚数决定了可连到总线上的器件数量。
在SPI传输中,数据是同步进行发送和接收的。
数据传输的时钟基于来自主处理器的时钟脉冲,摩托罗拉没有定义任何通用SPI的时钟规范。
然而,最常用的时钟设置基于时钟极性(CPOL)和时钟相位(CPHA)两个参数,CPOL定义SPI串行时钟的活动状态,而CPHA定义相对于SO-数据位的时钟相位。
CPOL和CPHA的设置决定了数据取样的时钟沿。
数据方向和通信速度SPI传输串行数据时首先传输最高位。
波特率可以高达5Mbps,具体速度大小取决于SPI硬件。
例如,Xicor公司的SPI串行器件传输速度能达到5MHz。
SPI总线接口及时序SPI总线包括1根串行同步时钟信号线以及2根数据线。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果 CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
SPI总线的工作方式及原理详解

SPI总线的工作方式及原理详解SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
SPI总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
SPI总线有四种工作方式(SP0,SP1,SP2,SP3),其中使用的最为广泛的是SPI0和SPI3方式。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI时序详解---SPI接口在模式0下输出第一位数据的时刻SPI接口有四种不同的数据传输时序,取决于CPOL和CPHL这两位的组合。
图1中表现了这四种时序,时序与CPOL、CPHL的关系也可以从图中看出。
图1CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0,空闲电平为低电平,CPOL=1时,空闲电平为高电平。
单片机中的SPI总线协议原理及应用研究

单片机中的SPI总线协议原理及应用研究SPI(Serial Peripheral Interface)总线协议是一种串行通信协议,广泛应用于单片机和外部设备之间的数据交换。
本文将介绍SPI总线协议的原理以及其在单片机中的应用研究。
一、SPI总线协议的原理SPI协议被广泛应用于许多IC芯片之间的通信,它使用多线全双工的通信模式,由一个主设备和一个或多个从设备组成。
SPI总线通信的核心是由主设备控制的时序同步传输。
SPI总线协议中,主设备通过四根信号线与从设备通信,分别是:1. SCK(Serial Clock):时钟信号线,由主设备产生,用于同步数据传输。
2. MOSI(Master Out Slave In):主设备输出、从设备输入的数据线,主设备将数据发送给从设备。
3. MISO(Master In Slave Out):主设备输入、从设备输出的数据线,从设备将数据发送给主设备。
4. SS(Slave Select):从设备选择线,用于选择与主设备进行通信的从设备。
SPI总线协议的通信流程如下:1. 主设备发送一个时钟脉冲,同时将MOSI上的数据发送给从设备。
2. 主设备接收从设备的数据,并同时发送另一个时钟脉冲。
3. 主设备不断重复以上两步操作,直到通信结束。
SPI总线协议使用传输率较高的时钟信号进行同步,因此可以实现较快的数据传输速度。
SPI协议的主要特点包括:1. 全双工通信:主设备和从设备可以同时发送和接收数据。
2. 时钟同步:通过时钟信号实现主设备和从设备的同步传输。
3. 硬件控制:SPI通信依赖硬件的控制,因此具有很高的可靠性和稳定性。
二、SPI总线协议在单片机中的应用研究SPI总线协议在单片机中广泛应用于各种外设的通信和控制。
下面将介绍一些常见的应用场景。
1. 存储器扩展在许多嵌入式系统中,存储器扩展是很常见的需求。
通过SPI总线协议,主单片机可以与外部存储器芯片进行通信。
例如,可以使用SPI接口连接闪存、EEPROM或SRAM等存储器芯片,实现数据的读写操作。
spi总线协议

spi总线协议SPI总线协议。
SPI(Serial Peripheral Interface)是一种用于在数字集成电路之间进行通信的同步串行通信协议。
它通常用于连接微控制器和外围设备,例如存储器芯片、传感器、显示器和无线模块等。
SPI总线协议具有简单、高效、灵活等特点,因此在许多嵌入式系统中得到广泛应用。
本文将对SPI总线协议的基本原理、通信方式、时序特性以及应用进行介绍。
SPI总线协议基本原理。
SPI总线由四根信号线组成,分别为时钟信号(SCLK)、主设备输出(MOSI)、主设备输入(MISO)和片选信号(SS)。
在SPI总线中,通信的主设备通过SCLK信号产生时钟脉冲,控制数据的传输。
MOSI信号用于主设备向从设备发送数据,MISO信号用于从设备向主设备发送数据。
片选信号用于选择从设备,使得主设备可以与多个从设备进行通信。
SPI总线协议通信方式。
SPI总线协议采用全双工通信方式,即主设备和从设备可以同时发送和接收数据。
通信开始时,主设备通过片选信号选择从设备,并在时钟信号的控制下,通过MOSI信号向从设备发送数据,同时从设备通过MISO信号向主设备发送数据。
通信结束后,主设备通过片选信号取消对从设备的选择,从而完成一次数据传输。
SPI总线协议时序特性。
在SPI总线协议中,数据的传输是在时钟信号的控制下进行的。
通常情况下,数据的传输是在时钟的上升沿或下降沿进行的,具体取决于SPI设备的工作模式。
此外,SPI总线协议还可以通过调整时钟信号的极性和相位来适应不同的外设要求,从而实现更灵活的通信方式。
SPI总线协议应用。
SPI总线协议在各种嵌入式系统中得到广泛应用,例如单片机、嵌入式系统、传感器网络等。
在单片机中,SPI总线协议通常用于连接外部存储器、显示器、通信模块等外围设备。
在嵌入式系统中,SPI总线协议可以用于连接各种外设,实现系统的功能扩展和升级。
在传感器网络中,SPI总线协议可以用于连接各种传感器节点,实现数据的采集和传输。
spi工作原理

spi工作原理SPI(Serial Peripheral Interface)是一种全双工、同步、串行通信总线,它在数字系统中得到了广泛的应用。
SPI接口是一种主从式接口,通常由一个主设备和一个或多个从设备组成。
在SPI接口中,主设备负责产生时钟信号和控制信号,而从设备则根据主设备的指令进行数据传输。
SPI接口的工作原理主要包括四个方面,时钟信号、数据传输、控制信号和传输模式。
首先,SPI接口采用的是同步通信方式,主设备产生的时钟信号会驱动数据的传输,从而保证了数据的同步性。
其次,SPI接口的数据传输是通过主设备和从设备之间的数据线进行的,数据的传输是双向的,主设备和从设备可以同时发送和接收数据。
这种双向传输的方式使得SPI接口在数据传输速度方面具有较大的优势。
再者,SPI接口通过控制信号来实现数据的传输和接收,主设备通过控制信号来选择从设备并控制数据的传输。
最后,SPI接口的传输模式有四种,分别是模式0、模式1、模式2和模式3,不同的传输模式会影响时钟信号和数据传输的相位和极性。
SPI接口的工作原理可以简单概括为以下几个步骤,首先,主设备产生一定频率的时钟信号,从设备根据时钟信号进行数据传输。
然后,主设备通过控制信号选择从设备,并将数据发送给从设备。
接着,从设备接收数据并进行处理,然后将处理后的数据发送给主设备。
最后,主设备接收从设备发送的数据,并进行相应的处理。
总的来说,SPI接口的工作原理主要包括时钟信号、数据传输、控制信号和传输模式四个方面。
SPI接口通过同步、双向、控制信号和传输模式的方式实现了主设备和从设备之间的高速数据传输,广泛应用于数字系统中。
SPI接口的工作原理清晰明了,为数字系统的设计和应用提供了重要的技术支持。
SPI通信总线的原理及工作过程简单分析

概况:
SPI,串行外围设备接口。高速的,全双工的,同步通信总线。有四个引
脚:SDI(数据输入),SDO(数据输出),SCLK(时钟),CS(片选)。
应用:
常作为单片机外设芯片串行扩展接口,主要应用于EEPROM,FLASH,实时
时钟,AD转换器,数字信号处理器和数字信号解码器之间。
通信原理:
以主从方式工作
MOSI(SDO):主器件数据输出,从器件数据输入。
MISO(SDI):主器件数据输入,从器件数据输出。
SCLK:时钟信号,由主器件产生。
SPI串行传输,数据一位一位从MSB或LSB开始传输,产生相应的脉冲
沿时,MOSI,MISO才进行数据传输。
CS:从器件使能信号,由主器件控制。
若CPOL=1,串行同步时钟的空闲状态为高电平;
时序如下
若CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据将被采
样;
若CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据将被采
样;
时序如下:
SPI主模块与与之通信的外设空闲状态的极性和时钟相位应该一致。
CS控制芯片是否被选中,只有片选信号为实现约定的使能信号时(高电位
或地电位),对此芯片的操作才有效,这也就允许同一总线上连接多个SPI设
备。
工作过程:
SPI可以用全双工通信方式同时发送和接收8(16)位数据,过程如下:
主机启动发送过程,送出时钟脉冲信号——>主移位寄存器的数据通过
SDO移入到从移位寄存器,同时从移位寄存器中的数据通过SDI移人到主移
接收缓冲器的满标志位或者中断标志位置1后,就可以读取接收缓冲器中的
SPI协议及工作原理分析

SPI协议及工作原理分析一、概述.SPI, Serial Perripheral Interface, 串行外围设备接口, 是 Motorola 公司推出的一种同步串行接口技术. SPI 总线在物理上是通过接在外围设备微控制器(PICmicro) 上面的微处理控制单元 (MCU) 上叫作同步串行端口(Synchronous Serial Port) 的模块(Module)来实现的, 它允许 MCU 以全双工的同步串行方式, 与各种外围设备进行高速数据通信.SPI 主要应用在 EEPROM, Flash, 实时时钟(RTC), 数模转换器(ADC), 数字信号处理器(DSP) 以及数字信号解码器之间. 它在芯片中只占用四根管脚 (Pin) 用来控制以及数据传输, 节约了芯片的 pin 数目, 同时为 PCB 在布局上节省了空间. 正是出于这种简单易用的特性, 现在越来越多的芯片上都集成了 SPI技术.二、特点1. 采用主-从模式(Master-Slave) 的控制方式SPI 规定了两个 SPI 设备之间通信必须由主设备 (Master) 来控制次设备(Slave). 一个 Master 设备可以通过提供 Clock 以及对 Slave 设备进行片选(Slave Select) 来控制多个 Slave 设备, SPI 协议还规定 Slave 设备的 Clock 由 Master 设备通过 SCK 管脚提供给 Slave 设备, Slave 设备本身不能产生或控制Clock, 没有 Clock 则 Slave 设备不能正常工作.2. 采用同步方式(Synchronous)传输数据Master 设备会根据将要交换的数据来产生相应的时钟脉冲(Clock Pulse), 时钟脉冲组成了时钟信号(Clock Signal) , 时钟信号通过时钟极性 (CPOL) 和时钟相位 (CPHA) 控制着两个 SPI 设备间何时数据交换以及何时对接收到的数据进行采样, 来保证数据在两个设备之间是同步传输的.3. 数据交换(Data Exchanges)SPI 设备间的数据传输之所以又被称为数据交换, 是因为 SPI 协议规定一个SPI 设备不能在数据通信过程中仅仅只充当一个 "发送者(Transmitter)" 或者 "接收者(Receiver)". 在每个 Clock 周期内, SPI 设备都会发送并接收一个 bit 大小的数据, 相当于该设备有一个 bit 大小的数据被交换了.一个 Slave 设备要想能够接收到 Master 发过来的控制信号, 必须在此之前能够被 Master 设备进行访问 (Access). 所以, Master 设备必须首先通过 SS/CS pin 对 Slave 设备进行片选, 把想要访问的 Slave 设备选上.在数据传输的过程中, 每次接收到的数据必须在下一次数据传输之前被采样. 如果之前接收到的数据没有被读取, 那么这些已经接收完成的数据将有可能会被丢弃, 导致 SPI 物理模块最终失效. 因此, 在程序中一般都会在 SPI 传输完数据后, 去读取 SPI 设备里的数据, 即使这些数据(Dummy Data)在我们的程序里是无用的.三、工作机制1. 概述上图只是对 SPI 设备间通信的一个简单的描述, 下面就来解释一下图中所示的几个组件(Module):SSPBUF, Synchronous Serial Port Buffer, 泛指 SPI 设备里面的内部缓冲区, 一般在物理上是以 FIFO 的形式, 保存传输过程中的临时数据;SSPSR, Synchronous Serial Port Register, 泛指 SPI 设备里面的移位寄存器(Shift Regitser), 它的作用是根据设置好的数据位宽(bit-width) 把数据移入或者移出 SSPBUF;Controller, 泛指 SPI 设备里面的控制寄存器, 可以通过配置它们来设置SPI 总线的传输模式.通常情况下, 我们只需要对上图所描述的四个管脚(pin) 进行编程即可控制整个 SPI 设备之间的数据通信:SCK, Serial Clock, 主要的作用是 Master 设备往 Slave 设备传输时钟信号, 控制数据交换的时机以及速率;SS/CS, Slave Select/Chip Select, 用于 Master 设备片选 Slave 设备, 使被选中的 Slave 设备能够被 Master 设备所访问;SDO/MOSI, Serial Data Output/Master Out Slave In, 在 Master 上面也被称为 Tx-Channel, 作为数据的出口, 主要用于 SPI 设备发送数据;SDI/MISO, Serial Data Input/Master In Slave Out, 在 Master 上面也被称为 Rx-Channel, 作为数据的入口, 主要用于SPI 设备接收数据;SPI 设备在进行通信的过程中, Master 设备和 Slave 设备之间会产生一个数据链路回环(Data Loop), 就像上图所画的那样, 通过 SDO 和 SDI 管脚, SSPSR 控制数据移入移出 SSPBUF, Controller 确定 SPI 总线的通信模式, SCK 传输时钟信号.2. Timing.上图通过 Master 设备与 Slave 设备之间交换 1 Byte 数据来说明 SPI 协议的工作机制.首先, 在这里解释一下两个概念:CPOL: 时钟极性, 表示 SPI 在空闲时, 时钟信号是高电平还是低电平. 若CPOL 被设为 1, 那么该设备在空闲时 SCK 管脚下的时钟信号为高电平. 当 CPOL 被设为 0 时则正好相反.CPHA: 时钟相位, 表示 SPI 设备是在 SCK 管脚上的时钟信号变为上升沿时触发数据采样, 还是在时钟信号变为下降沿时触发数据采样. 若 CPHA 被设置为 1, 则 SPI 设备在时钟信号变为下降沿时触发数据采样, 在上升沿时发送数据. 当 CPHA 被设为 0 时也正好相反.上图里的 "Mode 1, 1" 说明了本例所使用的 SPI 数据传输模式被设置成CPOL = 1, CPHA = 1. 这样, 在一个 Clock 周期内, 每个单独的 SPI 设备都能以全双工(Full-Duplex) 的方式, 同时发送和接收 1 bit 数据, 即相当于交换了 1 bit 大小的数据. 如果 SPI 总线的 Channel-Width 被设置成 Byte, 表示 SPI 总线上每次数据传输的最小单位为 Byte, 那么挂载在该 SPI 总线的设备每次数据传输的过程至少需要 8 个 Clock 周期(忽略设备的物理延迟). 因此, SPI 总线的频率越快, Clock 周期越短, 则 SPI 设备间数据交换的速率就越快.3. SSPSR.SSPSR 是 SPI 设备内部的移位寄存器(Shift Register). 它的主要作用是根据 SPI 时钟信号状态, 往 SSPBUF 里移入或者移出数据, 每次移动的数据大小由Bus-Width 以及 Channel-Width 所决定.Bus-Width 的作用是指定地址总线到 Master 设备之间数据传输的单位.例如, 我们想要往 Master 设备里面的 SSPBUF 写入 16 Byte 大小的数据: 首先, 给Master 设备的配置寄存器设置Bus-Width 为Byte; 然后往Master 设备的 Tx-Data 移位寄存器在地址总线的入口写入数据, 每次写入 1 Byte 大小的数据(使用 writeb 函数); 写完 1 Byte 数据之后, Master 设备里面的Tx-Data 移位寄存器会自动把从地址总线传来的1 Byte 数据移入 SSPBUF 里; 上述动作一共需要重复执行 16 次.Channel-Width 的作用是指定 Master 设备与 Slave 设备之间数据传输的单位. 与Bus-Width 相似, Master 设备内部的移位寄存器会依据Channel-Width 自动地把数据从 Master-SSPBUF 里通过 Master-SDO 管脚搬运到 Slave 设备里的 Slave-SDI 引脚, Slave-SSPSR 再把每次接收的数据移入Slave-SSPBUF里.通常情况下, Bus-Width 总是会大于或等于 Channel-Width, 这样能保证不会出现因 Master 与 Slave 之间数据交换的频率比地址总线与 Master 之间的数据交换频率要快, 导致 SSPBUF 里面存放的数据为无效数据这样的情况.4. SSPBUF.我们知道, 在每个时钟周期内, Master 与 Slave 之间交换的数据其实都是 SPI 内部移位寄存器从 SSPBUF 里面拷贝的. 我们可以通过往 SSPBUF 对应的寄存器 (Tx-Data / Rx-Data register) 里读写数据, 间接地操控 SPI 设备内部的SSPBUF.例如, 在发送数据之前, 我们应该先往 Master 的 Tx-Data 寄存器写入将要发送出去的数据, 这些数据会被 Master-SSPSR 移位寄存器根据 Bus-Width 自动移入Master-SSPBUF 里, 然后这些数据又会被Master-SSPSR 根据Channel-Width 从Master-SSPBUF 中移出, 通过Master-SDO 管脚传给Slave-SDI 管脚, Slave-SSPSR 则把从 Slave-SDI 接收到的数据移入Slave-SSPBUF 里. 与此同时, Slave-SSPBUF 里面的数据根据每次接收数据的大小(Channel-Width), 通过 Slave-SDO 发往 Master-SDI, Master-SSPSR 再把从Master-SDI 接收的数据移入 Master-SSPBUF.在单次数据传输完成之后, 用户程序可以通过从 Master 设备的 Rx-Data 寄存器读取 Master 设备数据交换得到的数据.5. Controller.Master 设备里面的 Controller 主要通过时钟信号(Clock Signal)以及片选信号(Slave Select Signal)来控制 Slave 设备. Slave 设备会一直等待, 直到接收到 Master 设备发过来的片选信号, 然后根据时钟信号来工作.Master 设备的片选操作必须由程序所实现. 例如: 由程序把 SS/CS 管脚的时钟信号拉低电平, 完成 SPI 设备数据通信的前期工作; 当程序想让 SPI 设备结束数据通信时, 再把 SS/CS 管脚上的时钟信号拉高电平.。
SPI

6-SPE
5-SPTIE 4-MSTR 3-CPOL 2-CPHA
1-SSOE
0-LSBFE
时钟模式
时钟模式
SS的用法
对于Slave模式,SS管脚一定作为片选输入用; 对于Master模式,SS管脚是否被SPI控制,取决于MODFEN,当该位为“1”表示SS被 SPI使用,但其功能由SSOE决定,SSOE为“1”时,SS作为片选输出;SSOE为“0”时 SS作为总线冲突指示输入。 总线冲突检测功能: 当管脚 SS 作为总线冲突指示用时(此时MSTR = 1, MODFEN = 1且SSOE = 0).当一个 主器件的SS管脚变为低时,意味着还有其它Master器件试图将该主器件作为Slave来 控制,此时产生总线冲突事件, 标志位MODF被置“1”(读SPIS然后写SPIC1清除该 位),且被控制器件将更改模式为Slave(MSTR位被清除),用户程序必须保证总线 冲突解除才能重新恢复器件为主模式。
4-MODF
•
SPI Data Register (SPID)
寄存器
1、读接收缓冲,写发送缓冲; 2、主模式下,写SPID启动一次数据传输; 3、只有在SPTEF为1时才写SPID; 4、在SPRF为“1”时,随时可以读取SPID,但一定要在下一次数据传输完成之前进行; 5、在SPRF为1之前读SPID,可能导致当前数据传输出错;
•图8-2 图
SPI串行总线典型时序
单片机管脚模拟SPI接口的方法 以便深入理解SPI时序
1) 用一般I/O口线模拟SPI操作 • 对于没有SPI接口的单片机来说,可使用软件来模 拟SPI的操作,包括串行时钟、数据输入和输出。 • 对于不同的串行接口外围芯片,它们的时钟时序 是不同的。 • 对于在SCK的上升沿输入(接收)数据和在下降沿 输出(发送)数据的器件(slave)
spi工作原理
spi工作原理SPI(Serial Peripheral Interface)是一种串行外设接口,它是一种全双工、同步的通信接口,用于连接微控制器和外围设备,如存储器、传感器、显示屏等。
SPI接口在嵌入式系统中得到了广泛应用,因为它具有高速、简单、灵活的特点。
本文将介绍SPI接口的工作原理。
SPI接口通常由四根线组成,时钟线(SCLK)、数据输入线(MISO)、数据输出线(MOSI)和片选线(SS)。
时钟线由主设备(通常是微控制器)控制,用于同步数据传输。
数据输入线和数据输出线分别用于从外设读取数据和向外设发送数据。
片选线用于选择通信的外设。
SPI接口的工作原理如下,首先,主设备拉低片选线,选择要通信的外设。
然后,主设备通过时钟线向外设发送时钟信号,同时通过数据输出线向外设发送数据。
外设在接收到时钟信号的上升沿时读取数据,并在下降沿时发送数据。
外设也可以通过数据输入线向主设备发送数据。
在通信结束后,主设备释放片选线,选择其他外设进行通信。
SPI接口的工作原理非常简单,但具有很高的灵活性和可扩展性。
它可以实现高速的数据传输,适用于对速度要求较高的应用场景。
同时,SPI接口可以连接多个外设,通过片选线选择要通信的外设,可以灵活地扩展系统的功能。
除了以上介绍的基本工作原理外,SPI接口还有一些特殊的工作模式,如主从模式和多主模式。
在主从模式下,一个设备作为主设备控制通信,其他设备作为从设备接收命令。
在多主模式下,多个主设备可以共享同一个SPI总线,通过片选线选择要通信的外设,实现多主设备之间的通信。
总之,SPI接口是一种非常实用的串行外设接口,具有高速、简单、灵活的特点,适用于嵌入式系统中对速度要求较高的应用场景。
通过理解其工作原理和特殊工作模式,可以更好地应用SPI接口,实现系统功能的扩展和优化。
SPI总线详细介绍
工作原理
双线和四线传输模式 双线SPI具有双I/O接口,与标准串行闪存设备相比,其传输速率可提高一倍。 MISO和MOSI数据引脚以半双工模式运行,每个时钟周期发送两个位。MOSI线变 为IO0,而MISO线变为IO1。 四线SPI与双线SPI类似,但吞吐量提高了四倍。添加了两条额外的数据线,每个 时钟周期传输4位,数据线为IO0、IO1、IO2和IO3。
菊花链级联方式走线的长度和走线的数量上相较与并联的级联方式有较明显的优势,但是该 种级联方式也限制了SPI总线对单个从机设备的读写操作。可以把每个从机看做移位寄存 器,在移位脉冲(SCLK)的作用下,串行数据从主机MOSI 输出,经由从机 SDI 管脚移入从机 DCP0,然后由 DCP0 的 SDO 管脚,移入 DPC1 的内部寄存器。
电路设计
layout注意事项
1.串阻靠近发射端放置,如RQA6RQA10靠近PCH;RQA5靠近FLASH 2.信号上过孔允许最大数量7个,一般 走不到这么多
3.数据和时钟的走线长度差要求在
500mil以内。
备注:双负载和三负载的情况,在信号线的
4.数据线距5mil以上,时钟和其它 两端加串阻,阻值大小默认参考Design
工作原理
传输模式 标准传输模式 根据时钟极性(CPOL)及相位(CPHA)不同可以组合成4种工作模式:SPI0, SPI1,SPI2,SPI3;其中使用的最为广泛的是SPI0和SPI3方式(实线表示)
Mode CPOL
0
0
1
0
2
1
3
1
CPHA 0 1 0 1
极性和相位
工作原理
工作原理
0和3这两种模式的相同的地方是都在时钟上升沿采样传输数据,区别这两种方 式的简单方法就是看空闲时,时钟的电平状态,低电平为mode 0 ,高电平为 mode 3。
同步串行外设接口总线(SPI)的简介

同步串行外设接口总线(SPI)的简介SPI 库这个库可以让你将Arduino 作为主设备,其他外围设备作为从设备与主设备以串行方式进行通信及交换信息。
同步串行外设接口总线(SPI)的简介同步串行外设接口总线(SPI)是用于MCU(微控制器)与一个或多个外围设备进行短距离快速通讯的同步串行数据协议。
它也可以用于两个微控制器之间的通信。
SPI 的连接始终是由一个主设备(通常是一个微控制器)来控制外围设备来进行。
通常在所有设备上都有三条线,Master In Slave Out (MISO) - 主设备数据输入,从设备数据输出,Master Out Slave In (MOSI) -主设备数据输出,从设备数据输入,Serial Clock(SCK)-串行时钟,数据传输的时钟基于主处理器产生的时钟脉冲,Slave Select(SS)-从属选择,从设备的管脚控制信号线,由主设备进行使能控制。
当从设备的SS 引脚置为低电平时,它与主设备进行通信。
当从设备的SS 引脚置为高电平时,断开与主设备的通信。
因此,SPI 允许一个主设备和多个从设备进行通信,主设备通过不同的SS 信号线选择不同的从设备进行通信。
给一个新的SPI 设备写程序,你需要注意以下几点:串行数据传输时,是先传输高位(MSB)还是先传输低位(LSB),这是由SPI.setBitOrder()函数来控制的。
数据时钟SCK 在空闲时,是高电平还是低电平?采样时,是在时钟脉冲的上升沿还是下降沿?这是由SPI.setDataMode() 函数来控制的SPI 是在怎样速度下运行的,即SCLK 提供多大的时钟脉冲使SPI 运行?这是由SPI.setClockDivider() 函数来控制的。
SPI 标准是不严格的,所以每个设备实现功能时稍有不同。
这意味着当你写代码时,要特别注意设备的数据表。
一般来说,有三种传输模式。
这些模式控制着数据是在SCK 的上升沿采样,还是在SCK 的下降沿采样(称为时钟相位),时钟信号在空闲时,是高电平还是低电平(称为时钟极性)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、SPI是英文Serial Peripheral Interface的缩写,中文意思是串行外围设备接口,SPI是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
SPI概述SPI:高速同步串行口。
3~4线接口,收发独立、可同步进行.SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。
是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB 的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI 和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO –主设备数据输出,从设备数据输入(2)SDI –主设备数据输入,从设备数据输出(3)SCLK –时钟信号,由主设备产生(4)CS –从设备使能信号,由主设备控制其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
这就允许在同一总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。
通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。
这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。
数据输出通过SDO 线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
完成一位数据传输,输入也使用同样原理。
这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。
要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。
同样,在一个基于SPI的设备中,至少有一个主控设备。
这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。
也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。
SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。
不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。
在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。
最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
AT91RM9200的SPI接口主要由4个引脚构成:SPICLK、MOSI、MISO及/SS,其中SPICLK是整个SPI总线的公用时钟,MOSI、MISO作为主机,从机的输入输出的标志,MOSI是主机的输出,从机的输入,MISO 是主机的输入,从机的输出。
/SS是从机的标志管脚,在互相通信的两个SPI总线的器件,/SS管脚的电平低的是从机,相反/SS管脚的电平高的是主机。
在一个SPI通信系统中,必须有主机。
SPI总线可以配置成单主单从,单主多从,互为主从。
SPI的片选可以扩充选择16个外设,这时PCS输出=NPCS,说NPCS0~3接4-16译码器,这个译码器是需要外接4-16译码器,译码器的输入为NPCS0~3,输出用于16个外设的选择。
[编辑本段]SPI协议举例SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
假设下面的8位寄存器装的是待发送的数据10101010,上升沿发送、下降沿接收、高位先发送。
那么第一个上升沿来的时候数据将会是sdo=1;寄存器中的10101010左移一位,后面补入送来的一位未知数x,成了0101010x。
下降沿到来的时候,sdi上的电平将锁存到寄存器中去,那么这时寄存器=0101010sdi,这样在8个时钟脉冲以后,两个寄存器的内容互相交换一次。
这样就完成里一个spi时序。
举例:假设主机和从机初始化就绪:并且主机的sbuff=0xaa,从机的sbuff=0x55,下面将分步对spi的8个时钟周期的数据情况演示一遍:假设上升沿发送数据这样就完成了两个寄存器8位的交换,上面的上表示上升沿、下表示下降沿,sdi、sdo相对于主机而言的。
其中ss引脚作为主机的时候,从机可以把它拉底被动选为从机,作为从机的是时候,可以作为片选脚用。
根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据主机的命令准备数据,主机在下一个8位时钟周期才把数据读回来。
SPI 总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
下图示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):SPI总线四种工作方式SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设备时钟相位和极性应该一致。
SPI总线包括1根串行同步时钟信号线以及2根数据线。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI接口时序如图3、图4所示。
补充:上文中最后一句话:SPI主模块和与之通信的外设备时钟相位和极性应该一致。
个人理解这句话有2层意思:其一,主设备SPI时钟和极性的配置应该由外设来决定;其二,二者的配置应该保持一致,即主设备的SDO同从设备的SDO配置一致,主设备的SDI同从设备的SDI配置一致。
因为主从设备是在SCLK的控制下,同时发送和接收数据,并通过2个双向移位寄存器来交换数据。
工作原理演示如下图:上升沿主机SDO发送数据1,同时从设备SDO发送数据0;紧接着在SCLK的下降沿的时候从设备的SDI接收到了主机发送过来的数据1,同时主机也接收到了从设备发送过来的数据0.[编辑本段]SPI协议心得SPI接口时钟配置心得:在主设备这边配置SPI接口时钟的时候一定要弄清楚从设备的时钟要求,因为主设备这边的时钟极性和相位都是以从设备为基准的。
因此在时钟极性的配置上一定要搞清楚从设备是在时钟的上升沿还是下降沿接收数据,是在时钟的下降沿还是上升沿输出数据。
但要注意的是,由于主设备的SDO连接从设备的SDI,从设备的SDO连接主设备的SDI,从设备SDI接收的数据是主设备的SDO发送过来的,主设备SDI接收的数据是从设备SDO发送过来的,所以主设备这边SPI时钟极性的配置(即SDO的配置)跟从设备的SDI接收数据的极性是相反的,跟从设备SDO发送数据的极性是相同的。
下面这段话是Sychip Wlan8100 Module Spec上说的,充分说明了时钟极性是如何配置的:The 81xx module will always input data bits at the rising edge of the clock, and the host will always output data bits on the falling edge of the clock.意思是:主设备在时钟的下降沿发送数据,从设备在时钟的上升沿接收数据。
因此主设备这边SPI时钟极性应该配置为下降沿有效。
又如,下面这段话是摘自LCD Driver IC SSD1289:SDI is shifted into 8-bit shift register on every rising edge of SCK in the order of data bit 7, data bit 6 …… data bit 0.意思是:从设备SSD1289在时钟的上升沿接收数据,而且是按照从高位到地位的顺序接收数据的。
因此主设备的SPI时钟极性同样应该配置为下降沿有效。
时钟极性和相位配置正确后,数据才能够被准确的发送和接收。
因此应该对照从设备的SPI接口时序或者Spec文档说明来正确配置主设备的时钟。