电磁组传感器电路
电磁感应中的电路

பைடு நூலகம்
3.解决与电路相联系的电磁感应问题的基本方法
(1)用法拉第电磁感应定律和__楞__次__定__律___确定感应电动势
的大小和方向; (2)画等效电路; (3)运用闭合电路欧姆定律、串并联电路性质、电功率等公
式联立求解.
► 知识点二 电磁感应中的图象问题
电磁感应中常涉及磁感应强度 B、磁通量 Φ、感应电动势 E 和感应电流 I 随时间 t 变化的图象,即 B-t 图象、Φ-t 图 象、E-t 图象和 I-t 图象. 对于切割磁感线产生感应电动势和 感应电流的情况,还常涉及感应电动势 E 和感应电流 I 随线圈 位移 x 变化的图象,即 E-x 图象和 I-x 图象.
变式题 2 [2011·全国卷]如图 42-3 所示,两根足够长的金属导 轨 ab、cd 竖直放置,导轨间距离为 L,电阻不计.在导轨上端并接 两个额定功率均为 P、电阻均为 R 的小灯泡.整个系统置于匀强磁 场中,磁感应强度方向与导轨所在平面垂直.现将一质量为 m、电 阻可以忽略的金属棒 MN 从图示位置由静止开始释放.金属棒下落 过程中保持水平,且与导轨接触良好.已知某时刻后两灯泡保持正 常发光.重力加速度为 g.求:
A.电容器所带的电荷量为 6×10-5 C B.通过 R 的电流是 2.5 A,方向从 b 到 a C.通过 R 的电流是 2 A,方向从 a 到 b D.R 消耗的电功率是 0.16 W
[答案] C
[解析] 由题意知,在变化的磁场中的线圈部分相当于电源, 电容器 C 与定值电阻 R 并联组成外电路.由法拉第电磁感应定律 可知,E=nΔΔΦt =nSΔΔBt ,电容器两极板间的电势差 UR=R+R rE, 所以电容器所带电荷量 q=CUR=CR+R rE,可得 A 选项错误;由 楞次定律可知通过 R 的电流方向为 a→b,由闭合电路的欧姆定律 可知:I=R+E r=2 A,B 选项错误,C 选项正确;R 消耗的电动率 P=I2R=16 W,D 选项错误.
磁电感应式传感器的测量电路
2、霍尔元件的工作原理
FL eB
e U H eB
b
FE
eEH
eUH b
U H bB
I dQ bdn e
dt
UH
IB ned
UH
IB ped
3、霍尔系数及灵敏度
N型霍尔系数
RH
1 ne
P型霍尔系数
RH
1 pe
IB U H RH d
霍尔系数由半导体材料性质决定,且决定霍尔电势的强弱。
7、寄生直流电势 :在外加磁场为零、霍尔元件用交 流激励时,霍尔电极输出除了交流不平衡电势外,还 有一直流电势,称为寄生直流电势。
其产生的原因有: ① 激励电极与霍尔电极接触不良, 形成非欧姆接 触, 造成整流效果; ② 两个霍尔电极大小不对称,则两个电极点的热 容不同, 散热状态不同而形成极间温差电势。 寄生直流电势一般在1mV以下,它是影响霍尔片 温漂的原因之一。
v
N
N
壳体
壳体
线 圈线 圈
永 久 永磁 久铁
S
S
弹 簧弹 簧
(a)
恒定磁通动圈(a)式磁电传感器
(b)
恒定磁通动铁(b式) 磁电传感器
二、 磁电感应式传感器基本特性
Io 传
E
Io
E R Rf
BolNv R Rf
感 器R
Rf
式中: Rf——测量电路输入电阻; R——线圈等效电阻。
传感器的电流灵敏度为
霍尔器件符号
C A
D
B
C
C
A
BA
B
H
D
D
二、霍尔元件的主要技术参数
汽车基础电路-电磁式转角位置传感器工作电路(第一遍)
电磁式转角位置传感器工作电路一、可以满足的教学功能本电路板主要模拟曲轴转角位置传感器的信号产生过程,以及传感器信号发生变化时,对喷油器、点火线圈以及汽油泵工作状况的影响。
通过该电路板的学习,可以:1、掌握电磁式转角位置传感器工作电路的组成和工作原理;2、理解电磁式转角位置传感器的作用和控制过程;3、掌握电路构成主要部件的作用和工作原理;4、学会电路板工作性能的检测方法;5、学会电路板常见故障的诊断和维修方法;6、掌握万用表、数字存储示波器的使用方法。
二、电路板工作原理曲轴转角位置传感器在基本车型中有三种基本传感器电路,分别为:电磁式转角位置传感器;光电式转角位置传感器;霍尔式转角位置传感器。
本电路主要讲解电磁式转角位置传感器的电路原理。
本电路由两部分组成,一部分为电磁式传感器的驱动电路,一部分为模拟喷油器、点火线圈、燃油泵的驱动电路,两部分电路之间通过控制模块(U2)联系在一起,依据传感器驱动电路输出的信号去控制喷油器、点火线圈、燃油泵的运行。
工作原理:接通电源后,传感器信号盘驱动电机开始工作,通过调节电位器RT1可以控制驱动电机的运行速度,此时电磁式转角位置传感器输出的信号频率和电压随驱动电机转速快慢而改变。
传感器输出的信号输入到单片机(U2)进行处理后,单片机(U2)根据输入信号的变化去控制喷油器、点火线圈和油泵的搭铁电路。
电路原理图如下:电磁式传感器驱动电路模拟喷油器工作电路元件参数表:元件编号元件名称参数R2、R5 电阻10KR3 电阻470ΩR1、R4、R6、R7、R8、R9、R10、R11、R12、电阻1KR13、R14RT1 电位器10KCT2、CT3 电解电容22uFCT1 电解电容10uFC1 瓷片电容0.01ufC2 瓷片电容0.1nfC3、C4 瓷片电容0.1ufD1、D2、D3 二极管IN4007 D4、D5、D6、D7、D8、D9、D10、D11 LED发光二极管Q1 场效应晶体管IRF540Q2 集成稳压电源7805Q3 三极管9013U1 555定时器NE555U2 单片机STC12C5204ADU3 光耦TLP521-1S3 不自锁按键Y1 晶振8MHzC5、C6 瓷片电容10PF 在本电路中,使用风扇模拟油泵的运行,使用LED灯模拟喷油器和点火线圈的运行。
电磁传感器
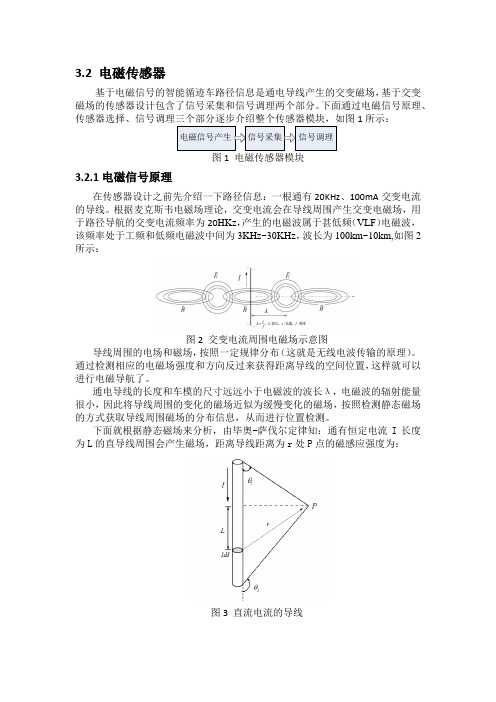
3.2 电磁传感器基于电磁信号的智能循迹车路径信息是通电导线产生的交变磁场,基于交变磁场的传感器设计包含了信号采集和信号调理两个部分。
下面通过电磁信号原理、传感器选择、信号调理三个部分逐步介绍整个传感器模块,如图1所示:图1 电磁传感器模块3.2.1电磁信号原理在传感器设计之前先介绍一下路径信息:一根通有20KHz、100mA交变电流的导线。
根据麦克斯韦电磁场理论,交变电流会在导线周围产生交变电磁场,用于路径导航的交变电流频率为20HKz,产生的电磁波属于甚低频(VLF)电磁波,该频率处于工频和低频电磁波中间为3KHz~30KHz,波长为100km~10km,如图2所示:图2 交变电流周围电磁场示意图导线周围的电场和磁场,按照一定规律分布(这就是无线电波传输的原理)。
通过检测相应的电磁场强度和方向反过来获得距离导线的空间位置,这样就可以进行电磁导航了。
通电导线的长度和车模的尺寸远远小于电磁波的波长λ,电磁波的辐射能量很小,因此将导线周围的变化的磁场近似为缓慢变化的磁场,按照检测静态磁场的方式获取导线周围磁场的分布信息,从而进行位置检测。
下面就根据静态磁场来分析,由毕奥-萨伐尔定律知:通有恒定电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为:图3 直流电流的导线B=∫μ0I4πr sinθdθθ2θ1(μ0=4π×10−7TmA−1)(3-1)由公式3-1得:B=μ0I4πr(cosθ1−cosθ2)(3-2)对于无限长直电流,公式3-2中的θ1=0,θ2=π,则如图4所示:B=μ0I4πr(3-3)图4 无限长导线周围的磁场强度通过上图得知:恒定电流的感应磁场的分布是以通电导线为轴的一系列同心圆,符合安培定则(又称右手螺旋定则)。
同一个圆上的磁场强度大小相同,并随着距离导线的半径r的增加成反比下降。
3.2.2传感器选择人类对于磁场的认识和检测起源很早,我国从古代人民很早就通过天然磁铁来感知地球磁场的方向,从而发明了指南针。
传感器常规应用及电路示意图

声———电磁感应 ——— 电流
电容式话筒: 声———电容变化———电流、电压
3、火灾报警器
光———电流变化———控制电路通断 非电学量———传感器———电学量———控制电路通断
传感器的应用模式
容易控制 容易测量显示
ቤተ መጻሕፍቲ ባይዱ
4、自动排气扇,其中A为水汽传感器,当水汽 的浓度增大时,其内部电阻减小
水汽浓度———电流———控制电路通断
传感器的常规应用
1、电子秤
原理分析:
力———电阻变化 ———电压
2、话筒
动圈式话筒构造原理图,它 是利用电磁感应现象制成的, 当声波使金属膜片振动时, 连接在膜片上的线圈(叫做 音圈)随着一起振动,音圈 在永久磁铁的磁场里振动, 其中就产生感应电流(电信 号),感应电流的大小和方 向都变化,变化的振幅和频 率由声波决定,这个信号电 流经扩音器放大后传给扬声 器,从扬声器中就发出放大 的声音
非电学量———传感器———电学量———控制电路通断
电磁感应电路

d B a b c v 电磁感应中的电路问题【学习目标】掌握电磁感应与电路规律的综合应用【复习精要】:1、在电磁感应现象中,切割磁感线的导体或磁通量发生变化的回路将产生感应电动势,该导体或回路就相当于电源,将它们接上电阻等用电器,便可对用电器供电,在回路中形成电流;将它们接上电容器,便可使电容器充电,因此电磁感应问题又往往跟电路问题联系在一起。
解决这类问题,不仅要考虑电磁感应中的有关规律,如右手定则、楞次定律和法拉第电磁感应定律等,还要应用电路中的有关规律,如欧姆定律、串联、并联电路电路的性质等。
2、解决电磁感应中的电路问题,必须按题意画出等效电路图,将感应电动势等效于电源电动势,产生感应电动势的导体的电阻等效于内电阻,求电动势要用电磁感应定律,其余问题为电路分析及闭合电路欧姆定律的应用。
3、一般解此类问题的基本思路是:①明确哪一部分电路产生感应电动势,则这部分电路就是等效电源②正确分析电路的结构,画出等效电路图. ③结合有关的电路规律建立方程求解.1 如图10所示,在绝缘光滑水平面上,有一个边长为L 的单匝正方形线框abcd ,在外力的作用下以恒定的速率v 向右运动进入磁感应强度为B 的有界匀强磁场区域。
线框被全部拉入磁场的过程中线框平面保持与磁场方向垂直,线框的ab 边始终平行于磁场的边界。
已知线框的四个边的电阻值相等,均为R 。
求: (1)在ab 边刚进入磁场区域时,线框内的电流大小; (2)在ab 边刚进入磁场区域时,ab 边两端的电压;a (3)在线框被拉入磁场的整个过程中,线框中电流产生的热量。
2 2007年高考天津理综卷24.(18分)两根光滑的长直金属导轨M N 、M ′ N ′平行置于同一水平面内,导轨间距为l ,电阻不计,M 、M ′处接有如图所示的电路,电路中各电阻的阻值均为R ,电容器的电容为C 。
长度也为l 、阻值同为R 的金属棒a b 垂直于导轨放置,导轨处于磁感应强度为B 、方向竖直向下的匀强磁场中。
第八章 磁电型传感器与测量电路
8.1 磁电感应式传感器
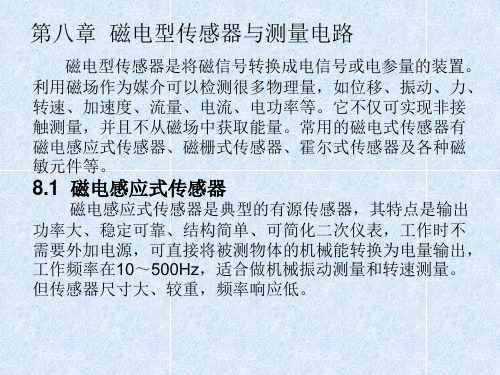
磁电感应式传感器是典型的有源传感器,其特点是输出 功率大、稳定可靠、结构简单、可简化二次仪表,工作时不 需要外加电源,可直接将被测物体的机械能转换为电量输出, 工作频率在10~500Hz,适合做机械振动测量和转速测量。 但传感器尺寸大、较重,频率响应低。
8.1.1 工作原理和结构形式 磁电感应式传感器利用导体和磁场发生相对运动时会在 导体两端输出感应电动势。根据法拉第电磁感应定律可知, 导体在磁场中运动切割磁力线,或者通过闭合线圈的磁通发 生变化时,在导体两端或线圈内将产生感应电动势,电动势 的大小与穿过线圈的磁通变化率有关。当导体在均匀磁场中, 沿垂直磁场方向运动时(如图8.1所示),导体内产生的感应电 动势为
图8-8 磁电感应式扭矩传感器
3.磁电式流量计 基于磁电感应原理的流量计如图8-9所示。在绝缘导管 上、下方放置永久磁铁,只要被测流体是导电的(如酸、碱 类流体),当其在导管中流动时,水平方向的两个电极就产 生感应电势。 感应电势与流体平均流速成 正比,也与单位时间内通过导管 横截面的流体体积(即流量)成正 比。感应电势经放大后输出,由 此可测出导管内流体的流量。 这种流量计要求流体必须是 导电的,但它无机械可动部分, 图8-9 磁电感应式流量计 电极不妨碍流体的流动,不受流 体粘度的影响,受流速分布的影 响也较小,具有很宽的测量范围 (0.005~190,000 m3/h)和较高 的测量精度(可达0.5%)。
Si I0 v U0 v
e BLNv sv
(8-4)
电压灵敏度是单位速度引起的输出电压变化,为
Sv
(8-5)
显然,为提高灵敏度可设法增大磁场强度B、每匝线圈长 度L和线圈匝数N。但在选择参数时要综合考虑传感器的材料、 体积、重量、内阻和工作频率。
磁阻传感器输出电路
U1 U max U0 KB// sin 90 U0 KB//
再旋转转盘,记录传感器输出最小的电压U2。
U 2 U min U0 KB// sin 270 U0 KB//
由|U1-U2|/2=KB//,求得当地地磁场水平分量B//
地磁场垂直分量B⊥
在一个不太大的范围内,地磁场基本上是均匀的,可用三个参量来表示地磁场的方向和大小: 1) 磁偏角α ,地球表面任一点的地磁场矢量所在垂直平面(图中 与Z构成的平面,称地磁子午面),与
地理子午面(图中X、Z构成的平面)之间的夹角。 2) 磁倾角 β,地磁场矢量 与水平面(即图的矢量 和OX与OY构成平面的夹角)之间的夹角。 3) 水平分量 , 地磁场矢量 在水平面上的投影。 测量地磁场的这三个参量,就可确定某一地点地磁场矢量的方向和大小。当然这三个参量的数值随
时间不断地在改变,但这一变化极其缓慢,极为微弱。
B
B
B
我国一些城市的地磁参量
地名 齐齐哈尔 北京 西安 成都 长沙 昆明 广州
地北 理纬
47º22′
39º56′
34º16′
30º38′ 28º12′.8 25º04′.2 23º06′.1
位 置
东 经
123º59′
116º20′ 108º57′ 104º03′
地磁场的数值比较小,约10-5量级
地磁场作为一种天然磁源,在军事、工业、医学、探 矿等科研中也有着重要用途。
本实验采用新型坡莫合金磁阻传感器测定地磁场磁感 应强度及地磁场磁感应强度的水平分量和垂直分量
测量地磁场的磁倾角,从而掌握磁阻传感器的特性及 测量地磁场的一种重要方法
地磁场的北极、南极分别在地理南极、北极附近,彼此并不重合,如图所示,而且两者间的偏差随 时间不断地在缓慢变化。地磁轴与地球自转轴并不重合,有交角。
磁电感应式传感器测量电路

三、磁敏三极管 1、结构
c
H-
H+
c b
N+
i
b
e
P+ N+
r
e
2、工作原理
(1)当不受磁场作用时
由于磁敏三极管的基区宽度大于载流子有效扩散长度, 因而注入的载流子除少部分输入到集电极c外,大部分 通过e—i—b而形成基极电流。显而易见,基极电流大于 集电极电流。 所以,电流放大系数 =Ic/Ib<1。
6、 额定激励电流和最大允许激励电流:当霍尔元件 自身温升10℃时所流过的激励电流称为额定激励电流。 以元件允许最大温升为限制所对应的激励电流称为最 大允许激励电流。因霍尔电势随激励电流增加而线性 增加,所以使用中希望选用尽可能大的激励电流,因 而需要知道元件的最大允许激励电流。改善霍尔元件 的散热条件,可以使激励电流增加。
r1 A
r3
C
r2
r4
D
B
RP
RP
RP
RP
R RP
(b)
(a) (d()c)
R (d
2、温度误差及补偿方法
RH/cm2/℃﹒A-1
ρ/7×10-3Ω·cm
6 250
200
LnAs
4
150
100
LnSb
2
50
0
0
40 80 120 160 200
T/℃
LnAs
LnSb
50
100 150 200 T/℃
磁电感应式传感器测量电路
第一节 磁电感应式传感器
电磁 电热传感器简介
LOGO
热电式传感器
1.原理:
热电阻效应:物质的电阻随温度变化而变化的现象。 自然界中,大多数纯金属导体的电阻具有随温度变化的
二、金属热电阻传感器
特性,其特性方程如下:
Rt R0 (1 At Bt Ct )
2 3
金属导体在t℃和0℃时的电阻值 A、B、C是金属导体电阻温度系数,在一定的温 度范围内,A、B、C可近似地视为一个常数
线性霍尔
N
S
磁铁
8
2014-3-23
LOGO
霍尔转速表原理
当齿对准霍尔元件时,磁力线集中穿过霍尔元 件,可产生较大的霍尔电动势,放大、整形后输 出高电平;反之,当齿轮的空挡对准霍尔元件时, 输出为低电平。
9 2014-3-23
LOGO
霍尔转速传感器在汽车防抱死装置(ABS)中的应用
带有微 型磁铁 的霍尔 传感器
LOGO
1.磁-电式传感器
2.热-电式传感器
LOGO
磁电式传感器
磁电式传感器
1
工作原理:利用电磁感应原理,将被测量(振动, 位移,速度等)转换成电信号,故也可称为电磁 感应传感器。
法拉第电磁感应定律:因磁通量变化产生感应电动势的现象, 闭合电路的一部分导体在磁场里做切割磁感线的运动时, 导体中就会产生电流(或感应电动势),这种现象叫电磁感应。
它们的分度号分别为Pt10和Pt100,其中Pt100最为常用; 二者都有各自的分度表,即Rt与t的关系。 在实际测量中,只要测得热电阻的阻值Rt,便可从分
度表上查出对应的温度值。
LOGO
铂电阻分度表
LOGO (2) 铜热电阻 • 应 • 优 用:测量精度要求不高且温度较低的场合 测量范围:―50~150℃ 点:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• • • • 漆包线检测 起跑线检测 信号选通电路 电路板高度选择
漆包线检测电路
• • • • 谐振电路 交流放大电路 整流电路 直流放大电路
谐振电路
交流放大电路
整流电路
直流放大电路
起跑线检测电路
信号选通电路
电路板高度选择
• 电感线圈的高度选择 • 霍尔元件的高度选择
电感线圈的高度选择
• 由实验测得,线圈离地1.5~2.0cm为最合适。 如果线圈在漆包线正上方,则该线圈输出 的信号经处理后为 3v DC,其他输出信号 为零;如果漆包线在两线圈中间,则离漆 包线最近的两个线圈都输出1v DC,其他线 圈输出信号为零。这样当漆包线在传感器 板下方时,至少可保证有一个传感器能检 测到。
霍尔元件的高度选择
• 见霍尔元件测试。 • 有以上测试得,传感器电路板高度定位 1.7cm最好。