组态王及单片机多机串口通信的设计
基于ASCII的单片机与组态王通讯设计

命令格式可查阅组态王使用手册。
2 通 信 流 程 图 1 组态 王从 单 片机 读 数 据 过 程 如 图 1所 示 。 )
字 头 HE AD: 1字节 1个 AS I , 0 Cl码 4 H
设备 地 址 : 节 2个 A CI , ~ 5 ( 0 0 0f 1字 S l 0 2 5 即 ~ xf 码 H)
标志: 1字 节 2个 AS l , i bi bt 0:读 , i =1: Cl码 bt 0~ t i 7, 0= bt 0
写 。 i : : 打包 。 i b 2 0 , bt O 不 1 bt i = 0 数据 类 型 为字 节 。 i bt = 1 3 t bt i 0 , 3 2 数据 类 型为 字 。bt bt = X 数 据 类 型为 浮 点 数 。 i i 1, 3 2
单 片 机的 串行 通 信 , 建 监 控 系 统 。 文 完 成 了组 态 王 与 单 片 机 构 本
通 讯 正 常 时下 位 单 片 机 应 答 格 式 为
HA ED 设 备 地 址 # # 蚌或 CR l ( 式 5 格 )
的通 讯 设 汁 , 方 法 设 汁简 单 且 实 时 性 好 , 用 于一 般 用 户 。 该 适 1 组 态 王 与 单 片机 的通 信 协 议
HE AD 设备 地址 标 志 数据 地 址 数据 字 节数 数 据 异 或 CR
通 讯 不 正常 时下 位 单 片机 应 答 为
J A J设备地址 j { HE D 异或 c J( 6) R 格式
其 中
和 舟} 不 同 的数 值 , }为 具体 组 态 王 与 单 片机 通 讯 的
异 或 :异 或 从 设 备 地址 到异 或 字 节前 ,异 或 值 转 换 成 2个
组态王与单片机通讯
组态王与单片机协议1.通讯口设置:通讯方式:RS-232,RS-485,RS-422均可。
波特率:由单片机决定(2400,4800,9600and19200bps)。
字节数据格式:由单片机决定。
注意:在组态王中设置的通讯参数如波特率,数据位,停止位,奇偶校验必须与单片机编程中的通讯参数一致2.在组态王中定义设备地址的格式格式:##.#前面的两个字符是设备地址,范围为0-255,此地址为单片机的地址,由单片机中的程序决定;后面的一个字符是用户设定是否打包,“0”为不打包、“1”为打包,用户一旦在定义设备时确定了打包,组态王将处理读下位机变量时数据打包的工作。
注意:在组态王中定义变量时,一个X寄存器根据所选数据类型(BYTE,UINT,FLOAT)的不同分别占用一个、两个,四个字节,定义不同的数据类型要注意寄存器后面的地址,同一数据区内不可交叉定义不同数据类型的变量。
为提高通讯速度建议用户使用连续的数据区。
例如,1、在单片机中定义从地址0开始的数据类型为BYTE型的变量:则在组态王中定义相应的变量的寄存器为X0、X1、X2、X3、X4。
,数据类型为BYTE,每个变量占一个字节2、在单片机中定义从地址100开始的数据类型为UINT型的变量:则在组态王中定义相应的变量的寄存器为X100、X102、X104、X106、X108。
,数据类型UINT,每个变量占两个字节3、在单片机中定义从地址200开始的数据类型为FLOAT型的变量:则在组态王中定义相应的变量的寄存器为X200、X204、X208、X212。
,数据类型FLOAT,每个变量占四个字节3.组态王与单片机通讯的命令格式:读写格式(除字头、字尾外所有字节均为ASCII码)说明;字头:1字节1个ASCII码,40H设备地址:1字节2个ASCII码,0—255(即0---0x0ffH)标志:1字节2个ASCII码,bit0~bit7,bit0= 0:读,bit0= 1:写。
单片机多机串行通信设计方法分析
单片机多机串行通信设计方法分析单片机多机串行通信设计方法分析单片机是指只有一块集成电路中包含了微处理器CPU、存储器RAM和ROM、I/O口以及各种中断和计时芯片等,是一种完整的计算机系统。
在很多应用场合中,需要将多个单片机互相传递信息,实现工作协同。
这就需要用到串行通信技术,将多个单片机连接在一起,通过串行通信协议实现数据的传递与交换。
单片机多机串行通信的设计方法主要有以下几种:1.基于RS485总线的串行通信RS485总线是一种全双工的串行通信接口标准,可实现多个设备在同一总线上进行通信,具有通信距离远、噪声抵抗能力强、传输速率快等优点。
在单片机多机通信中,可以采用RS485总线,通过总线上的数据收发模块实现单片机之间的串行通信。
在RS485总线上,每一个设备都有一个独立的地址,可以通过地址来区分不同的设备。
发送数据时,将数据和目标地址打包成一个数据帧,通过总线发送给指定的设备;接收数据时,不符合地址的数据帧会被过滤掉,符合地址的数据帧会被接收并处理。
采用RS485总线可以连接多达128个设备,但也存在总线冲突、抢占等问题需要注意。
2.基于CAN总线的串行通信CAN总线是一种多控制器局域网(MCAN)的串行通信标准,用于高速实时数据传输场景,可实现多设备之间的串行通信。
在单片机多机通信中,可以采用CAN总线,通过总线数据收发模块实现单片机之间的串行通信。
在CAN总线上,每个设备都有一个独立的标识符,通过标识符来区分不同的设备和传输的数据类型。
发送数据时,将数据和目标设备的标识符打包成一个数据帧,通过总线发送给指定的设备;接收数据时,通过CAN总线模块接收数据帧,并根据标识符判断数据的来源以及类型。
采用CAN总线可以连接多达110个节点,但也存在总线错误、抢占等问题需要注意。
3.基于SPI总线的串行通信SPI总线是一种在集成电路内部实现的简单串行同步总线,可实现多设备之间的串行通信。
在单片机多机通信中,可以采用SPI总线,通过总线数据收发模块实现单片机之间的串行通信。
单片机与组态王的通信实例
单片机与组态王的通信实例随着工业自动化的发展,越来越多的设备开始采用单片机进行控制。
而组态王作为一种通用的组态软件,可以方便地对单片机的控制过程进行监控和操作。
本文将介绍一个单片机与组态王通信的实例,以帮助读者了解二者的基本通信原理和实现方法。
一、单片机与组态王的通信方式单片机与组态王之间的通信一般采用串口通信方式。
串口通信是一种常见的通信方式,它通过串口数据线将单片机与计算机连接起来,实现数据传输。
在组态王中,可以通过设置串口参数来与单片机进行通信。
二、单片机通信协议在单片机与组态王通信的过程中,需要约定一些通信协议来实现数据的传输和控制。
通信协议一般包括数据格式、波特率、校验方式等。
根据不同的单片机和组态王版本,通信协议可能会有所不同,需要根据实际情况进行调整。
三、组态王通信控件的使用在组态王中,可以使用串口通信控件来实现单片机与组态王之间的通信。
控件提供了许多函数和属性,可以方便地进行串口通信。
例如,可以使用控件的Open函数打开串口,使用Read函数和Write函数进行数据的读取和写入。
四、实例:单片机控制LED灯亮灭下面是一个简单的单片机与组态王通信实例:通过单片机控制LED灯的亮灭。
该实例中使用的单片机型号为AT89C51,组态王版本为6.53。
1、硬件连接将AT89C51单片机的P1.0引脚连接到LED灯上,并将单片机的RXD 和TXD引脚分别连接到计算机的串口上。
2、编写程序在AT89C51单片机上编写程序,用于控制LED灯的亮灭。
程序如下:MOV P1.0, #1 //将P1.0引脚电平设为高电平,LED灯亮SJMP $ //无限循环,保持电平不变3、组态王组态设计在组态王中创建一个新项目,并添加一个设备,选择与AT89C51单片机进行通信的串口设备。
然后创建一个画面,添加一个按钮和指示灯,用于控制LED灯的亮灭。
4、编写组态王脚本程序在组态王中编写脚本来实现与单片机的通信。
脚本如下:Dim ledState As Integer //定义LED状态变量,初始值为0 Function OnClick() As Integer //按钮单击事件处理函数If ledState = 0 Then //如果LED状态为灭,则发送高电平信号,使LED亮起CommandManager.WriteTag("TagName", "1") //写入高电平信号ledState = 1 //修改LED状态为亮Else //如果LED状态为亮,则发送低电平信号,使LED熄灭CommandManager.WriteTag("TagName", "0") //写入低电平信号ledState = 0 //修改LED状态为灭End IfEnd Function5、调试与运行将程序编译并下载到AT89C51单片机中,然后运行组态王程序。
组态王与单片机多机串口通信的设计方案

组态王与单片机多机串口通信的设计1 引言随着工业化要求提高,分布式系统发展以及控制设备与监控设备之间通讯需要,组态软件设计的监控系统逐步普及。
现在组态软件繁多,比如KingVieW(组态王>、MCGS、W inCC等。
KingView软件基于Microsoft Windows XP,NT/2000操作系统.具有友好的人机操作界面、强大的IO设备端口驱动能力,可与各种PLC、智能仪表、智能模块、板卡、变频器等实时通讯。
由于在检测大量模拟量的工业现场使用PLC与组态软件通讯势必增加产品成本。
而单片机接口丰富,与A/D转换模块组合可以完成相同的工作,并且系统可靠、成本低。
2 组态王与单片机的串口通讯方法目前,组态王与单片机的通信多是通过动态数据交换(DDE>或通过自己开发通讯驱动程序完成。
DDE是Windows平台上的一个完整的通信协议,组态王通过该协议与其他应用程序交换数据。
但不可靠和非实时。
而自己开发通讯驱动程序会带来设计困难,增加系统开发周期,可行性不高。
组态王专门提供一种与单片机多机串口通信方法,可满足大多数系统需求。
3 PC机与单片机的硬件接口电路图1为上位PC机与下位单片机80C51的连接电路。
PC机与单片机本身都自带串行通讯接口,但由于在分布式系统中PC机与各单片机的分布不集中,不能利用RS-232通讯传输,只能改用RS-485。
RS-485采用差分式传输信号,最大传输距离为1 219 m.最大传输速率为10 Mb/s.对同时出现的两条信号线A、B的干扰有较强的抑制能力。
当两条线绞在一起时,被通信各种分布参数耦合过来的干扰信号可平均地分配到这两条线上,因此对RS-485的差分式传输线路而言,用双绞线可获得较强的抗干扰能力。
RS-485采用二线与四线平衡传输方式,二线制可实现真正的多点双向通信,但需要在传输线上接电阻(约120 Ω>。
由于80C51系列单片机STC89C52串行接口的,TTL电气特性与RS-485电气特性不相符,STC89C52不能与RS-485直接连接,需要电气转换。
组态王与ARM开发板串口通信实现

组态王与ARM开发板串口通信实现组态王与ARM开发板串口通信实现摘要本文阐述了一种基于亚控公司的组态王中的单片机通讯协议(ASCII)实现组态王与ARM9开发板串口通信的程序设计方法,本方法已在TQ2440开发板上编程设计实现,并成功与组态王正确通信。
关键词组态王;ARM9;通讯协议;串口通信0 引言随着工业自动化要求提高,组态软件设计的监控系统逐步普及,开发的控制设备与监控设备之间需要通讯。
组态王KingView软件基于Microsoft Windows XP,NT/2000操作系统,具有友好的人机操作界面,可与各种PLC、智能仪表等实时通讯,但无法与自己开发的控制设备通信,ARM9作为高性能处理器经常用来开发工控设备,所以实现组态王与ARM9开发板的串口通信对工控设备开发十分必要。
1 组态王与ARM9开发板的串口通信方法1.1 组态王支持的单片机通讯协议(ASCII)本设计采用亚控公司的组态王中的单片机通讯协议(ASCII)实现组态王与ARM9开发板串口通信。
亚控公司的组态王中的单片机通讯协议(ASCII)简介如下:上位机发送读命令:字头-设备地址-标志-数据地址-数据字节数-异或-CR若正常下位机应答:字头-设备地址-数据字节数-数据-异或- CR 若不正常下位机应答:字头-设备地址-**-异或- CR上位机发送写命令:字头-设备地址-标志-数据地址-数据字节数-数据-异或- CR若正常下位机应答:字头-设备地址-##-异或- CR若不正常下位机应答:字头-设备地址-**-异或- CR1.2 组态王与ARM9开发板串口通信方法组态王与ARM9开发板串口通信采用亚控公司的组态王中的单片机通讯协议(ASCII)。
组态王安装在上位PC机上,组态王本身支持单片机通讯协议(ASCII),要实现组态王与ARM9开发板串口通信,其实任务就是在下位机。
组态王65与单片机的通信方法
&h
II
T 222222 a .+J. (5Q,*9.*.(K.LEAEM"NGG"X&!R I I 读数据请求 T 222222 a .+J. (5Q,*9.*.(K.LEAEM"NGG"X&%R I I 写数据请求 T 222222 a I P 发送数据 P I (5Q,*O.)->,DR T U<G"H 9<G"H :OG"H *0*G"H 5C0Q(G"H(/,*O.)->,DH(__R T OV?FG,*O.)-LEAEM(NH \3(+.QU<GG"R H U<G"H *0*eG,*O.)-LEAEM(NH a OV?FG"X"fH I I 发送 :U8 \3(+.QU<GG"R H U<G"H *0*eG"X"fH 发送校验位 OV?FG*0*H II \3(+.QU<GG"R H U<G"H a a I P 初始化串口 P I KC(- ()(Ab,E0AQKC(-R T 222222 a KC(- DE()QKC(-R T ()(Ab,E0AQRH \3(+.Q$R T :OG$H E)J\.0b*D-QRH a a
图’
4/;<//=1 设置图
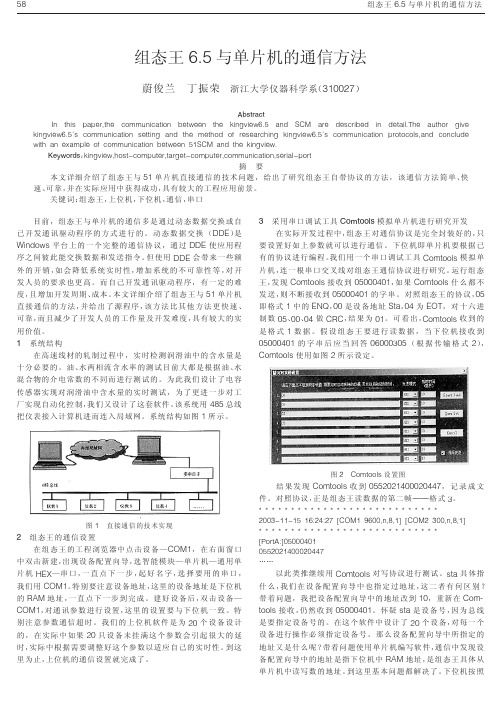
结 果 发 现 4/;<//=1 收 到 &##’&’%2&&&’&22( , 记 录 成 文 —格式 $。 件。对照协议, 正是组态王读数据的第二帧——
图% 直接通信的技术实现
单片机与组态王软件通讯的解决方案
单片机与组态王软件通讯的解决方案
1、引言
组态王软件作为一种工业控制组态软件在国内已得到了非常广泛的应用。
其具有强大的硬件支持能力,对国内外绝大多数PLC、变频器、板卡、模块、仪器仪表都编写了相应的驱动程序,使用起来相当方便快捷。
在农水实验田环境监测项目中,我们使用的硬件设备包括日本三菱PLC、台湾研华亚当模块及自行开发的基于单片机的分析仪器,我们选择的软件开发平台是组态王软件。
因此,实现单片机与组态王的数据通讯是一个必须解决的问题。
2、单片机与组态王软件通讯的解决方案
2.1 两种通讯解决方案
单片机与组态王软件通讯的解决方案有两种,其一是直接编写支持单片机的驱动程序,就象组态王支持PLC 一样;其二是利用组态王软件和Visual Basic 都支持DDE 的特点,以VB 为开发平台,写一个数据通讯应用程序,一方面
实现与单片机的连接,另一方面实现与组态王的动态数据交换。
2.2 两种方案的比较
第一种方案的优点是程序结构比较紧凑,数据通讯效率较高;缺点是必须由对组态王软件内核比较清楚的程序员开发,开发周期较长。
第二种方案可由一般的程序员开发,缺点是数据通讯效率较低。
在本项目中,我们采用了第二种方案。
3、基于DDE 方案的实现
3.1 DDE 的概念
DDE 是WINDOWS 平台上的一个完整通信协议,它使应用程序能彼此交换数据和发送指令。
DDE 过程可以比喻为两人对话,一方向另一方提出问题,然。
单片机与组态王基于ASCII型通讯程序设计

单片机与组态王基于 A CI S 型通讯程序设计 l
Co m u ia in P o r m b t e CU a d ig e B s d o m nc t r g a o e we n M n K n Viw a e n ASCI r o o s t c l I p o
# e ie E d 0 0 / d f n x d 定 义字 尾 C 一个 A CJ / n R, S I . # e ie e d o o / d f R a x o 上 位机 读 n /
#d fn W re x e ie i O O1 t / 上 位 机 写 /
u h r n we 【] 1x 0O 3 ,x 000000 0 } c a A s r8 = 0 4 ,x 00 3 ,,,.,x d ;
应答 信 息 帧 数 组 / u h rc u t O / c a o n= . 接 收 字 头字 尾 间 数 据 个 数 t / u h rf g 0 c a l = ; / 单 片 机 接 收 到字 头 标 志 a /
Ths i pap ito ce t e er n rdu s h ASCI omm u c i p ooc l bewe KigVi I c niat on r t os t en n ew an MCU, d d an prvi s o de al C pr a l ogrm s ure o c co of m pl de i eme of o muncain nt c m i t pr o ol I ont o otc s. d ne d o ta h t e t at c an f clisdi t us t e y a it r l ie ec y e h ASCI r t o I ooc l p
基于组态王的PC机与单片机串口通信技术研究
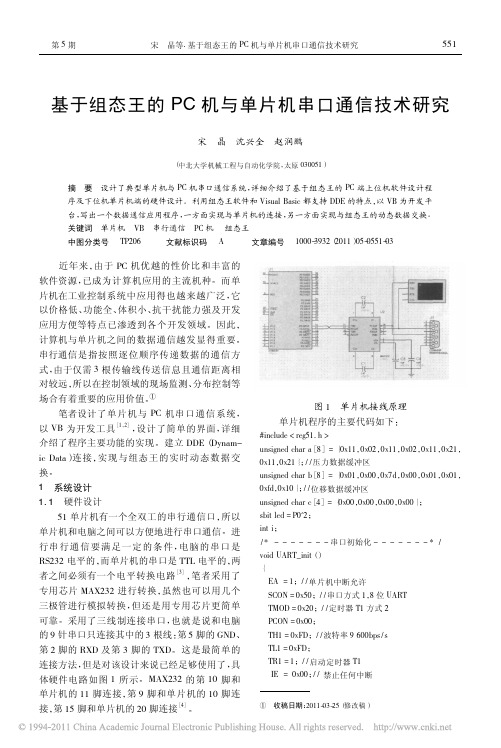
所示。
图2 2 2. 1
组态王与单片机通信的数据流向
EndSub
仿真与任务实现 Kingview 作为服务器向 VB 提供数据 建立 Kingview 工程项目步骤如下: a. 建立新项目。 工程名称— — —VBDDE1 , 工 2. 2 数据
调试运行时, 先运行 Kingview 画面程序, 再 启动 VisualBasic 应用程序。 Kingview 作为顾客程序从 VisualBasic 得到 建立 VB 工 程 项 目。 运 行 可 视 化 编 程 工 具 VisualBasic, 新建窗体 Form1 , 在窗体中加入一个 Text 控件: Text。 建立 KingView 工程项目步骤如下: a. 建立新项目。 工程名— — —VBDDE2 , 工程 — —Kingview 与 VisualBasic 动态数据交换。 描述— b. 定义 DDE 设备。 在工程浏览器中, 从左 然后在 边的工程目录显示区中选择“设备 / DDE ”
[10 ] [9 ]
参
考
文
献
[ 1] 桂万如, 卢结成. 基于 VB6. 0 的光谱数据实时采集 J] . 江南大学学报 ( 自然科学版 ) , 2004 , 系统设计[ 12 ( 5 ) : 445 ~ 447. [ 2] 蒋学润, 毛宗源. 利用 VB 开发与智能模块通信的 ActiveX 控件[ J] . 控制工程, 2004 , 11 ( s1 ) : 11 ~ 13 , 16. [ 3] 汪炼, J] .中 韩震宇. 基于 AVR 单片机的串口通信[ 2003 , 29 ( 2 ) : 52 ~ 53. 国测试技术, [ 4] 曾自强, 王雨菡. 用 VC + + 实现单片机与 PC 机串 J] . 自动化与仪器仪表, 2005 , 口通信的三种方法[ 19 ( 3 ) : 60 ~ 63. [ 5] 宗风强, 王振友. 用 Visual Basic6. 0 实现组态王和 J] . 山东理工大学学报( 自然科 单片机的串口通信[ 2005 , 19 ( 3 ) : 60 ~ 63. 学版) , [ 6] 吕俊亚. 单片机串口通信中的纠错编解码[ J] . 煤炭 2010 , 29 ( 7 ) : 156 ~ 157. 技术, [ 7] 朱建平, 吕春峰. 基于 LabVIEW 的单片机串口通信 J] . 机械工程与自动化, 2008 , ( 4 ) : 157 ~ 158. 实现[ [ 8] 夏建芳, 赵世富. 虚拟仪器与单片机串口通信的实 J] . 机械工程与自动化, 2006 , ( 2 ) : 136 ~ 142. 现[ [ 9] 刘杰, 王慧. 组态王与单片机多机串口通信的设计 [ J] . 电子设计工程, 2009 , 17 ( 7 ) : 7 ~ 11. [ 10] 丁建军, 周国柱, 陈定方. 基于 VB6. 0 的 PC 机与单 J] . 机械与电子, 2004 , ( 2 ) : 47 片机间的串口通信[ ~ 49.
单片机与组态王串口通信的设计

单片机与组态王串口通信的设计
张松枝;张芝雨
【期刊名称】《无线互联科技》
【年(卷),期】2012(000)012
【摘要】组态王软件是当前广泛应用的组态监控软件之一,具有良好的人机操作界面以及强大的I0设备驱动能力.单片机接口丰富,与A/D转换模块组合可与组态软件实时通讯,并且系统可靠、成本低,本论文介绍一种组态王与单片机串口通讯的方法..
【总页数】2页(P114-115)
【作者】张松枝;张芝雨
【作者单位】许昌职业技术学院,河南许昌 461000
【正文语种】中文
【相关文献】
1.基于单片机和组态王的温度监控系统的设计 [J], 李图江
2.读一篇文章,作一个单片机电路(七)——基于AT89C51单片机的串口通信程序的设计 [J], 黄亮
3.组态王与单片机多机串口通信的设计 [J], 刘杰;王慧
4.基于组态王的PC机与单片机串口通信技术研究 [J], 宋晶;沈兴全;赵润鹏
5.用Visual Basic
6.O实现组态王和单片机的串口通信 [J], 宗风强;王振友
因版权原因,仅展示原文概要,查看原文内容请购买。
组态王与单片机的通信

组态王与单片机的通信与设计前言本文主要是解决装有组态王的PC机与单片机的通信问题,这里选择通过计算机的COM1口进行串行通信。
单片机和PC机的串行通行一般采用RS-232、RS-422或RS-485总线标准接口,也有采用非标准的20mA电流环的。
为保证通信的可靠,在选择接口时必须注意:(1)通信的速率;(2)通信距离:(3)抗干扰能力;(4)组网方式,既可以保证正常通信时的最大通信端口数量。
这里采用RS-232接口与单片机通信的方法。
由于两者间的电平规范不一致,实现两者间的通信要解决接口电路的电平转换问题。
正文选题背景随着单片机和微机技术的不断发展,单片机的应用也从独立的单机向网络发展,由PC机和多台单片机构成的多级网络测控系统已成为单片机技术发展的一个方向。
在一个大型的应用系统中,通常由单片机完成数据的采集和上传,后台则通过PC机对数据进行分析并处理,复杂的还要建立数据库形成网络,二者的结合,充分发挥了单片机在实时数据采集和微机对图形处理、显示以及数据库管理上的优点,使得单片机的应用已不仅仅局限于传统意义上的自动监测或控制,而形成了向以网络为核心的分布式多点系统发展的趋势。
随着微电子技术、计算机控制技术、工业以太网技术及现场总线技术的发展,作为用户无需改变运行程序原代码的软件平台工具——工控组态软件日渐成熟。
由于工控组态软件在实现工业控制的过程中免去了大量烦琐的编程工作,解决了长期以来控制工程人员缺乏计算机专业知识与计算机专业人员缺乏控制操作技术和经验的矛盾,极大地提高了自动化工程的工作效率。
近年来,工控组态软件在中小型工业过程控制工程、工业自动化工程中越来越受到欢迎。
不仅如此,工控组态软件还在配电自动化、智能楼宇、农业自动化、能源监测等领域也逐步展示了其独特的优势。
单片机控制系统以其高性能价格比、稳定、易于实现等特点而被广泛使用,但他难以实现动态复杂的图形监控界面;而组态王软件具有强大丰富的监控界面设计功能,却难以实现复杂的控制算法,而单片机则难以实现动态复杂的图形监控界面,若采用以单片机为下位机,以装有组态王的PC极为上位机的控制方式,将彻底改变原来单片机控制系统的单调、简单的控制界面的缺陷,进一步推动单片机控制方式的广泛应用。
单片机双机之间的串行通信设计
单片机双机之间的串行通信设计1.引言单片机双机之间的串行通信是指两个或多个单片机之间通过串口进行数据传输和通信的过程。
串行通信是一种逐位传输数据的方式,与并行通信相比,它占用的硬件资源更少,且传输距离较远。
本文将介绍单片机双机之间串行通信的设计过程,包括硬件设计和软件编程。
2.硬件设计串行通信需要使用到两个主要的硬件部件:串口芯片和通信线路。
串口芯片负责将要发送或接收的数据转换成串行数据流,并通过通信线路进行传输。
通信线路通常包括两根传输数据的线路(TX和RX)、地线和时钟线。
2.1串口芯片的选择常用的串口芯片有MAX232、MAX485、CH340等。
选择合适的芯片需要考虑通信距离、通信速率、系统的功耗等因素。
对于较短的通信距离和较低的通信速率,可以选择MAX232芯片;而对于长距离通信和较高的通信速率,可以选择MAX485芯片。
2.2通信线路设计通信线路的设计需要考虑信号的传输质量和抗干扰能力。
通常使用双绞线或者屏蔽线路来减小信号的串扰和干扰。
对于短距离通信,双绞线即可满足需求;而对于长距离通信,需要采用屏蔽线路来减小串扰和干扰。
3.软件设计串行通信的软件设计主要包括通信协议的制定和数据包的格式规定。
3.1通信协议的选择通信协议是指数据传输的一套规则和约定,它规定了数据的格式、传输顺序、误码校验等内容。
常用的通信协议有UART、RS232、SPI、I2C等。
UART是最常用的通信协议,它一般使用异步通信方式,并具有较高的通信速率和稳定性。
3.2数据包的格式规定数据包是一组有意义的数据的集合,它包括起始位、数据位、停止位和校验位等。
起始位用于标识一个数据包的开始,通常为逻辑低电平;数据位用于存储要传输的数据;停止位用于标识数据包的结束,通常为逻辑高电平;校验位用于检测数据传输过程中是否发生错误。
校验位可以是奇校验、偶校验、无校验等。
4.实验步骤4.1连接硬件根据硬件设计部分的要求,将串口芯片和通信线路连接到单片机上。
单片机双机之间的串行通信设计

单片机双机串行实验报告实验报告:单片机双机串行通信实验一、实验目的本实验旨在通过单片机实现双机间的串行通信,包括数据的发送和接收,并利用这种通信方式完成一定的任务。
二、实验原理1.串行通信:串行通信是将数据一个个位发送或接收的方式。
数据通过一个线路逐位发送或接收,可以减少通信所需的线路数目。
2. UART串口通信:UART是通用异步收发传输器(Universal Asynchronous Receiver/Transmitter)的简称,是一种最常用的串口通信方式,通常用于单片机与计算机、单片机与单片机之间的通信。
3.串口模块:串口模块是负责将数据转变为串行传输的硬件模块,包括发送端和接收端。
通过设置波特率、数据位、校验位和停止位等参数,可以实现数据的可靠传输。
4.单片机串口通信:单片机内部集成了UART串口通信接口,只需要通过相应的寄存器配置,可以实现串口通信功能。
5.双机串行通信:双机串行通信是通过串口将两台单片机进行连接,一台单片机作为发送端,负责将数据发送出去;另一台单片机作为接收端,负责接收并处理发送的数据。
三、实验器材与软件1.实验器材:两台单片机、USB转TTL模块、杜邦线若干。
2. 实验软件:Keil C51集成开发环境。
四、实验内容与步骤1.配置发送端单片机(1)连接单片机和USB转TTL模块,将USB转TTL模块的TXD端连接到单片机的P3口,将GND端连接到单片机的地线。
(2)在Keil C51环境下创建新工程,编写发送端程序。
(3)配置串口通信的波特率、数据位、校验位和停止位,并打开串口发送中断。
(4)循环发送指定的数据。
2.配置接收端单片机(1)连接单片机和USB转TTL模块,将USB转TTL模块的RXD端连接到单片机的P3口,将GND端连接到单片机的地线。
(2)在Keil C51环境下创建新工程,编写接收端程序。
(3)配置串口通信的波特率、数据位、校验位和停止位,并打开串口接收中断。
单片机与组态王基于ASCII型通讯程序设计

目前在工业控制现场的仪表较多,传统的数显仪表不能满足实际的需要,需要添加相应的A /D 或D /A 模块转换数据,上位机需要通过配套的下位机数据采集模块获取现场仪表数据,如PLC ,再通过相应通信协议来与下位机通讯进行数据交换,此法成本较高。
本文论述了通过单片机采集现场仪表数据,通过与组态软件提供的通用ASCII 型协议通讯。
实践表明:采用该方式通讯可靠、设计简单、代码可移植性高,实用性较强。
1组态王与单片机通讯协议概述单片机多用来采集现场的信息,如何实现单片机与组态软件进行数据交换?早期主要有DDE 方式、板卡方式等,最新版本组态王提供的单片机通用通讯协议支持HEX 型和ASCII 型,可通过串口直接与单片机通讯。
通讯方式为RS232、RS422、RS485,通讯波特率可达19200bps 。
蔚俊兰、赵学军等人介绍了采用HEX 型通讯协议来实现单片机与组态王通讯。
本文主要详细介绍ASCII 型通用通讯协议实现组态王与单片机通讯,该型具有设计简单,通俗易懂特点,具体参数可以查阅相关技术文档。
2组态王设备配置在实际开发过程中,组态王对ASCII 型通讯协议完全是封装好的。
在程序设计过程中可以采用相应串口监视软件来分析组态王向单片机发送的数据,便于程序设计。
为了实现单片机与组态王的通讯,在组态王中设置的通讯参数如波特率,数据位,停止位,奇偶校验必须与单片机编程中的通讯参数一致。
本文中采用通讯波特率9600bps ,8位数据位,1位停止位,无奇偶验证。
组态王中设置设备地址格式为:##.#。
前面两个字符是设备地址(0~255),此地址为单片机的地址;后面的一个字符是用户设定是否打包,“0”为不打包、“1”为打包。
体参数设定方法可以查阅相关技术文档。
3单片机通讯源程序设计本文的通讯程序采用C 语言设计,通过Keil 开发软件设计了单片机与组态王基于ASCII 码通用通讯程序。
3.1数据定义数据定义主要用于对单片机相关参数进行相应设定,如单片机地址,单片机与组态王通讯命令格式的字头、字尾。
组态王_单片机通讯设计及应用

组态王⁃单片机通讯设计及应用作者:傅宗宁姜周曙黄国辉来源:《现代电子技术》2014年第24期摘 ;要:设计一种基于单片机的组态王KingView液位控制系统;描述系统管路设计和底层硬件,着重对组态王和单片机之间的ASCII码型通信协议,以及单片机在组态王中的通信格式设置进行说明。
将其应用到设计的以ADμC834为主控芯片的三容水箱液位控制系统中,加入简单PID控制算法,进行了实物验证,使系统液位能快准稳的稳定在目标液位上,显示该系统具有可靠性高、集成度高和成本低等优点。
关键字:组态王; 三容水箱液位控制; PID; ASCII码中图分类号: TN919⁃34; TP24 ; ; ; ; ; ; ; ; ; 文献标识码: A ; ; ; ; ; ; ; ; ; ;文章编号:1004⁃373X(2014)24⁃0101⁃04Design and application of KingView communication system based onsingle⁃chip microcomputerFU Zong⁃ning, JIANG Zhou⁃shu, HUANG Guo⁃hui(Automation College, Hangzhou Dianzi University, Hangzhou 310018, China)Abstract: A sort of KingView liquid level control system based on single⁃chip microcomputer is designed in this paper. The pipeline design and underlying hardware of the system are described. ASCII code communication protocol between KingView and MCU, and MCU communication format in KingView are elaborated in detail. They are applied to the self⁃designed three⁃tank water level control system,in which ADμC834 is taken as its main control chip and a simple PID control algorithm is added. The physical verification result indicates that it can control the water level in the setting level quickly, accurately and steadily, which shows that the system has high reliability,high integration and low cost.Keywords: KingView; three⁃tank liquid level control; PID; ASCII code0 ;引 ;沿随着工业自动化要求的提高,以及控制设备和过程监控装置之间通信的需求,使用组态软件设计的监控系统在逐渐普及。
单片机与组态王的通讯程序设计

·基金项目:桂教科研【2003】22
万方数据
单片机与组态王的通讯程序设计
NAK:(H15)否认应答帧开始; EOT:(H04)请求帧的结束; 曰X:(H03)应答帧的结束;
Sta:设备地址1字节; R:读标志1字节(O×52); W:写标志1字节(0x57);
DalaType:数据类型,1表示字节,2表示字,3表示浮点数; DataNum:要读取的数据的数量,1字节;
nUm=n:
p=(b”e。)DalB+ptr: for(i=00<num:i++) {k=i:Tbuf【3+k】=p[k】:} break:
caSe DW://进行字的读区 num=n/2:DacW[0】++:
p=(byfe+)DafW+ptr★2: for(._0:i<num:i++) { k=i’2;Tbuf【3+k】=p【k+1】: Tbuf【4+k】=p【k】:
通过串行中断程序,接收组态王发送来的数据,并进行规范 化识别,将符合规定的数据接收到数据缓冲区,当接收到有效数 据包后,设置接收标志RecvOk,通知协议处理程序。同时将发
送缓冲区的数据发送出去。 Vojd Uart()interrupt 4 uslng 1 f
byfe m: if(RI)//ENQ…….EOT,CRC { RI=0:m=SBUF:
1)格式1。组态王发送地址请求:(检验位为1)
2)格式2。单片机应答地址:(检验位为O)
3)格式3。组态王读数据请求:(检验位为0)
ENo R
DalaType DalaAddo
Da{aNum
EoT cRc
4)格式4。单片机应答读数据(正确):(检验位为O)
5)格式bo单片机厦否误效琚(错误):(检驻位为U) 6)格式6。组态王写数据请求:(检验位为O)
组态王软件与单片机串口ascii通讯的机制及实现方法
组态王软件与单片机串口ascii通讯的机制及实现方法作者:姜宝申组态软件广泛的应用于工农业生产的各个领域,是保证相关系统设备经济稳定安全运行的重要方式,是对传统控制方式的一次革命,得到了越来越广泛的应用。
很多工控及电子爱好者对这方面很感兴趣,都跃跃欲试,可苦于软件要想得到实际效果,就得连接设备,通过设备预设的寄存器与软件的变量进行连接,辅以命令语言,才能取得真正的体验。
软件支持的设备比如板卡、数字仪表、PLC、变频器等等都是属于工控设备,价格都比较昂贵,一般很难触及。
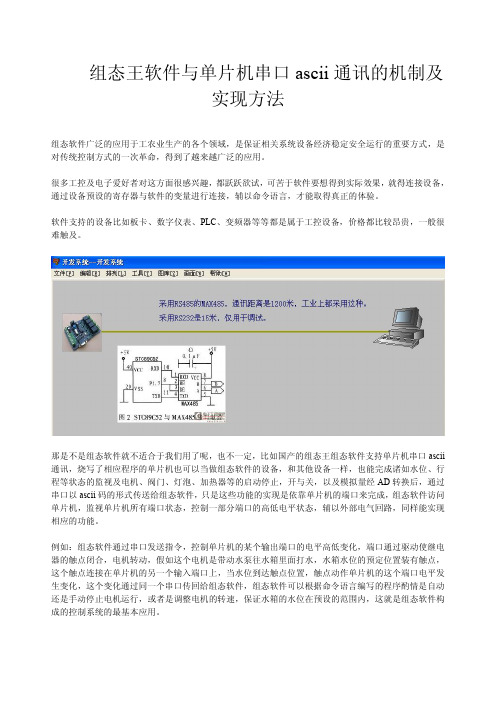
那是不是组态软件就不适合于我们用了呢,也不一定,比如国产的组态王组态软件支持单片机串口ascii 通讯,烧写了相应程序的单片机也可以当做组态软件的设备,和其他设备一样,也能完成诸如水位、行程等状态的监视及电机、阀门、灯泡、加热器等的启动停止,开与关,以及模拟量经AD转换后,通过串口以ascii码的形式传送给组态软件,只是这些功能的实现是依靠单片机的端口来完成,组态软件访问单片机,监视单片机所有端口状态,控制一部分端口的高低电平状态,辅以外部电气回路,同样能实现相应的功能。
例如:组态软件通过串口发送指令,控制单片机的某个输出端口的电平高低变化,端口通过驱动使继电器的触点闭合,电机转动,假如这个电机是带动水泵往水箱里面打水,水箱水位的预定位置装有触点,这个触点连接在单片机的另一个输入端口上,当水位到达触点位置,触点动作单片机的这个端口电平发生变化,这个变化通过同一个串口传回给组态软件,组态软件可以根据命令语言编写的程序酌情是自动还是手动停止电机运行,或者是调整电机的转速,保证水箱的水位在预设的范围内,这就是组态软件构成的控制系统的最基本应用。
图1相对而言,用单片机与组态软件实现的控制系统要比其他成品设备的组态稍微麻烦一些,不但需要了解掌握组态软件的工作机制,还需要单片机的软硬件及电路方面的知识,这里边的重点就是单片机的汇编或c语言编程,但掌握了组态软件的通讯协议,按协议编写,比较起来并不是很难。
组态王与单片机通讯
166 //打包字读
#define TYPEWritw
85 //字节写
#define TYPEWritw2
87 //打包字写
#define TYPEReadF
168 //双字读
#define TYPEReadF2
170 //打包双字读
#define TYPEWritF
组态王与单片机通讯
与组态王通讯时请注意选择的单片机晶震频率和波特率及效验否则无法通讯成功
本次测试组态王只支持 19200 波特率,再高的波特率没有成功,不知道是何原因难道组态的原因吗?
************************************************************************************************************/
//xdata uint x2 _at_ 0x2000; //在 xdata 区中定义字变量 x2,它的地址为 0x2000H,这里是 uint
//unsigned int xdata dat[10]={1,7,3,4,5,6,7,8,9,10}; unsigned char xdata datBYTE[3]={ 5,
6, 7,
}; unsigned int xdata datWORD[10]; unsigned long xdata datFOALT[10];
unsigned char recbuf[22]={ 0x40, //字头---------组态王向单片机回读写的数据 0x30, //设备地址 2 0x31, //设备地址 1 0x30, //标志 11111111 B(000001100) 0x31, //标志 bit0= 0:读,bit0= 1:写 bit1= 0:不打包。 0, //数据地址 0, //数据地址 0, //数据地址 0, //数据地址 0, //数据字节数 0, //数据字节数 0, //数据 0, //数据 0, //数据 CR 结束符号读写数据类型为字节为 14 个数据 0, //数据 0, //异或 0, //异或 0x0d, //CR 结束符号读写数据类型为字为 18 个数据 0, 0x0d, //CR 结束符号读写数据类型为浮点型为 20 个数据 0,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
组态王与单片机多机串口通信的设计1 引言随着工业化要求提高,分布式系统发展以及控制设备与监控设备之间通讯需要,组态软件设计的监控系统逐步普及。
现在组态软件繁多,比如KingVieW(组态王)、MCGS、WinCC等。
KingView软件基于Microsoft Windows XP,NT/2000操作系统.具有友好的人机操作界面、强大的IO设备端口驱动能力,可与各种PLC、智能仪表、智能模块、板卡、变频器等实时通讯。
由于在检测大量模拟量的工业现场使用PLC与组态软件通讯势必增加产品成随着工业化要求提高,分布式系统发展以及控制设备与监控设备之间通讯需要,组态软件设计的监控系统逐步普及。
现在组态软件繁多,比如KingVieW(组态王)、MCGS、WinCC等。
KingView软件基于Microsoft Windows XP,NT/2000操作系统.具有友好的人机操作界面、强大的IO设备端口驱动能力,可与各种PLC、智能仪表、智能模块、板卡、变频器等实时通讯。
由于在检测大量模拟量的工业现场使用PLC与组态软件通讯势必增加产品成本。
而单片机接口丰富,与A/D转换模块组合可以完成相同的工作,并且系统可靠、成本低。
2 组态王与单片机的串口通讯方法目前,组态王与单片机的通信多是通过动态数据交换(DDE)或通过自己开发通讯驱动程序完成。
DDE是Windows平台上的一个完整的通信协议,组态王通过该协议与其他应用程序交换数据。
但不可靠和非实时。
而自己开发通讯驱动程序会带来设计困难,增加系统开发周期,可行性不高。
组态王专门提供一种与单片机多机串口通信方法,可满足大多数系统需求。
3 PC机与单片机的硬件接口电路图1为上位PC机与下位单片机80C51的连接电路。
PC机与单片机本身都自带串行通讯接口,但由于在分布式系统中PC机与各单片机的分布不集中,不能利用RS-232通讯传输,只能改用RS-485。
RS-485采用差分式传输信号,最大传输距离为1 219 m.最大传输速率为10 Mb/s.对同时出现的两条信号线A、B 的干扰有较强的抑制能力。
当两条线绞在一起时,被通信各种分布参数耦合过来的干扰信号可平均地分配到这两条线上,因此对RS-485的差分式传输线路而言,用双绞线可获得较强的抗干扰能力。
RS-485采用二线与四线平衡传输方式,二线制可实现真正的多点双向通信,但需要在传输线上接电阻(约120 Ω)。
由于80C51系列单片机STC89C52串行接口的,TTL电气特性与RS-485电气特性不相符,STC89C52不能与RS-485直接连接,需要电气转换。
这里采用Maxim公司的MAX485,图2为其接口电路。
图2中,MAX485的RE和DE南STC89C52单片机的P1.7控制。
由于MAX485以半双工的方式工作,因此由P1.7控制其发送与接收。
当P1.7为高电平时,驱动器使能而接收器为高阻态,此时可发送数据;而当P1.7为低电平时.接收器使能而驱动器为高阻态,此时接收数据。
另外由于PC机的COM口是基于RS-232的串行通讯口.其电气特性与RS-485不一致,因此也需电平转换。
图3为单片机地址设置电路,单片机STC89C52的P1口的低4位用于设定本机地址,通过4位DIP开关的组合最多可设定16种地址。
如当4位开关全部断开时,对应的本机地址是11 11。
下位单片机在开始工作前需先设定自己的地址,这样,在开机自检时下位单机片就能获取本机地址。
4 系统通讯协议设计组态王提供了通过PC机与单片机串口进行十六进制数据通讯的驱动,而驱动中已经规定好其通讯协议。
4.1 通讯参数通讯参数包括数据位、停止位、波特率、校验方式。
其中,数据位、停止位、波特率由单片机决定。
组态王中的设定和单片机一致即可。
校验方式参照“数据传输格式”部分。
4.2 数据传输格式与协议说明格式1 组态王发送地址请求格式(检验位为1):格式2单片机应答地址格式(检验位为0):格式3组态王读数据请求格式(检验位为0):格式4单片机应答读数据格式(正确)(检验位为O):格式5单片机应答读数据格式(错误)(检验位为0):格式6组态王写数据请求格式(检验位为O):格式7单片机应答写数据格式(正确)(检验位为0):协议具体说明如下:•ENQ(头):H05,询问,请求帧的开始代码;•ACK(头):H06,确认,ACK应答帧的开始代码;•NAK(头):H15,否认,NAK应答帧的开始代码;•EOT(尾):H04,正文的结束,请求帧的结束ASCII代码;•ETX(尾):H03,结束正文,应答帧的结束ASCII代码;数据传输:所有数据均为16进制数;•Sta:设备地址,1个字节,组态王设备地址范围为0~255,此地址为单片机的地址,由单片机中的程序决定;•R:读标志,1个字节(0x52);•W:写标志,1个字节(0x57);•DataType:需要交换的数据类型,1字节。
其中“1”代表字节,“2”代表字,“3”代表浮点型;•DataNum:读取数据的个数,1字节;•DataAddr:数据偏移地址,2字节,低字节在前,高字节在后;•Data:实际传输的数据,低字节在前,高字节在后;•DataLong:单片机返回Data的字节数,2字节,低字节在前,高字节在后:•CRC:为从第1个字节至CRC前的所有字节的异或值,1字节;•ErrorCode:错误代码,“0”代表正确应答,“1”代表数据类型错误,“2”代表数据范围超限,“3”代表指令无法识别。
• 1.首先确认单片机下位机程序是采用标准modbus协议ASCII ,RTU ,1.引言组态王软件作为一种工业控制组态软件在国内已得到了非常广泛的应用。
其具有强大的硬件支持能力,对国内外绝大多数PLC、变频器、板卡、模块、仪器仪表都编写了相应的驱动程序,使用起来相当方便快捷。
在“农水实验田环境监测”项目中,我们使用的硬件设备包括日本三菱PLC、台湾研华亚当模块及自行开发的基于单片机的分析仪器,我们选择的软件开发平台是组态王软件。
因此,实现单片机与组态王的数据通讯是一个必须解决的问题。
2.单片机与组态王软件通讯的解决方案2.1两种通讯解决方案单片机与组态王软件通讯的解决方案有两种,其一是直接编写支持单片机的驱动程序,就象组态王支持PLC一样;其二是利用组态王软件和Visual Basic都支持DDE的特点,以VB为开发平台,写一个数据通讯应用程序,一方面实现与单片机的连接,另一方面实现与组态王的动态数据交换。
2.2两种方案的比较第一种方案的优点是程序结构比较紧凑,数据通讯效率较高;缺点是必须由对组态王软件内核比较清楚的程序员开发,开发周期较长。
第二种方案可由一般的程序员开发,缺点是数据通讯效率较低。
在本项目中,我们采用了第二种方案。
3.基于DDE方案的实现3.1DDE的概念DDE是WINDOWS平台上的一个完整通信协议,它使应用程序能彼此交换数据和发送指令。
DDE过程可以比喻为两人对话,一方向另一方提出问题,然后等待回答。
提问的一方称为“客户”,回答的一方称为“服务器”。
一个应用程序可以同时是“客户”和“服务器”,当它向其他程序中请求数据是,它充当的是“客户”,若有其他程序向它提供数据,它又成了“服务器”。
3.2通讯程序的数据流向用VB编写的数据通讯程序作为中间者传递组态王与单片机之间的数据。
当组态王需要向单片机发送控制命令时,组态王充当服务器向VB通讯程序提供数据,VB通讯程序再通过串口实现对单片机的远程控制;当组态王需要向单片机采集数据时,组态王充当客户向VB通讯程序请求数据。
组态王与单片机通讯的数据流向如图1图1组态王与单片机通讯的数据流向3.3代码实现1.组态王的DDE设置组态王的DDE对话的内容是通过三个标识名来约定的。
应用程序名(application):进行DDE对话的双方名称主题(topic):被讨论的数据域项目(item):被讨论的特定数据对象为了建立DDE连接,需要在组态王的数据词典里建立一个DDE变量,并登记三个标识名。
组态王运行系统的程序名是“VIEW”,主题规定为“TAGNAME”,项目是在定义DDE变量时定义的项目名称。
2.VB通讯程序中的DDE设置在VB中DDE的连接是通过控件的属性和方法来实现的。
当VB充当服务器时,需要设置LinkTopic和LinkMode属性;当VB充当客户时,需要设置LinkTopic,LinkIte m和LinkMode属性。
例如,VB通讯程序作为服务器时的设置如下:Sub Form_Load()LinkTopic=”form1”LinkMode=1End Sub3.VB与单片机的通讯在VB中可用Microsoft公司的32位串口通信控件Mscomm32.ocx实现与单片机的通讯。
在程序初始化时,设置Rthreshoid属性为1,接收缓冲区接收到数据时触发On Comm事件,从而进行数据的接收和处理。
Sub MSComm1_OnComm()Select Case mEventCase Mscomm EV RECEIVEInbuffe=MSComm1.InputReceivedata=InbuffeMSComm1Receive=FalseEnd Select。
End Sub4.结论采用上述方案,我们在“农水实验田环境监测系统”项目中,很好地解决了组态王软件与单片机的数据通讯。
一年来,系统运行稳定可靠,产生了良好的经济效益。