基于STC15的智能清洁机器人设计
基于STC15单片机的智能清扫机器人的设计
基于STC15单片机的智能清扫机器人的设计李海;费丽君;石文强;刘明玉【摘要】以清扫作业区域环境,减轻劳动力为目的,在清扫机器人上配置信息采集传感器,通过核心处理器STC15单片机将采集接收到的数据进行分析,然后将分析后的数据进行一系列处理,并结合自身姿态选出一条合理路径.在遍历路径时,实时采集路径状况及环境指数,以此执行相应的子程序,直到完成作业.经过仿真实验,清扫面积达98.75%,重复率抵达7%.与目前市场上的清扫机器人相比,在保证效率的同时,降低了成本,提高了可靠性.【期刊名称】《黑龙江八一农垦大学学报》【年(卷),期】2018(030)003【总页数】5页(P72-76)【关键词】清扫机器人;stc15单片机;信息采集传感器【作者】李海;费丽君;石文强;刘明玉【作者单位】黑龙江八一农垦大学,大庆163319;黑龙江八一农垦大学,大庆163319;黑龙江八一农垦大学,大庆163319;黑龙江八一农垦大学,大庆163319【正文语种】中文【中图分类】TP242随着生活节奏不断的增快与工作压力的增大,越来越多的人们想从日常的清洁事务中解脱出来[1]。
当前计算机技术、微电子技术、网络技术等方面发展迅速,扫地机技术在人工智能、计算机和传感器技术的推动下也获得了飞速进展,清扫机器人逐渐走入人们的家庭。
最早的扫地机器人是2002年由美国公司所推出的“Roomba”[2]。
国内该产品起步较晚,由哈尔滨工业大学研制并取得了一定的成果[3]。
无论国外还是国内,清扫机器人的价格都很昂贵。
因此,本项目就是设计、制作一个针对于室内环境的自动清扫机器人,通过硬件和软件的设计,实现自动清扫、避障、遍历等一系列功能。
此次设计成本价格低、人为干扰少,实用性强,可靠性较高。
1 系统的整体设计设计主要研究微控制器、数据采集和机械控制三大部分。
信息采集传感器将采集到的数据经一定的处理之后,传给微控制器STC15,经内部算法处理之后,控制机械工作清扫,根据采集的环境指数,控制机械作用的时间长短。
基于单片机设计的清扫机器人
基于单片机设计的清扫机器人
史秀男
【期刊名称】《通讯世界:下半月》
【年(卷),期】2015(000)008
【摘要】清扫机器人是一种环保、智能型的服务机器人,具有良好的应用前景和广泛的市场要求。
本文设计并制作一个基于单片机的清扫机器人。
当清扫机器人遇到障碍物时,利用超声波原理进行合理避障。
在机器人运行的时候,清扫风扇持续工作以达到清洁的目的。
该清扫机器人具有设计简单,操作便捷,成本低,效率高等特点。
【总页数】1页(P198-198)
【作者】史秀男
【作者单位】沈阳工学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于STC15单片机的智能清扫机器人的设计
2.基于单片机设计的清扫机器人
3.基于蚁群算法的清扫机器人路径规划设计
4.基于stm32的智能清扫机器人设计
5.基于PLC的太阳能面板自动清扫机器人的设计研究
因版权原因,仅展示原文概要,查看原文内容请购买。
多功能扫地机器人的设计及制作
多功能扫地机器人的设计及制作作者:唐益协周亮魏泽宇吴智辉董清来源:《科技风》2018年第19期摘要:随着机器人技术的进步,人们追求高品质生活,期待拥有可以清洁家庭卫生的机器人,使用超声波、环境监测模块实现避障和环境检测,手机APP对机器人控制,边刷和吸尘电机进行清洁,STC单片机对信息进行处理的机器人将使生活更加方便。
关键词:STC15系列单片机;APP控制;WIFI连接;室内环境检测1 多功能扫地机器人的设计目的随着物联网的发展,收入的提高,人们追求高质量的生活环境,为了代替人力更好的清洁,多功能扫地机器人应运而生。
2 多功能扫地机器人的系统构架3 多功能扫地机器人的硬件设计3.1 处理芯片本机器人采用STC15W4K58S4单片机作为核心控制芯片,数据存储器大小:4KB;高速且比传统8051快7~12倍也比STC早期的1T系列单片的速度快20倍,拥有低功耗模式。
无需外部复位和外部晶振的单片机,内部有高精度R/C时钟,内置硬件看门狗,成本低,前景好。
3.2 边刷电机在本项目中,扫地机器人是通过CR120边刷电机来实现第一次清扫,边刷电机是一种带有清洁刷的利用电动机带动刷子旋转运动的,将电能转化为机械能的电机,因此用它来实现清扫。
3.3 吸尘器电机在本项目中运用最常见的串励电机,一种应用非常广泛的电机,它的优点是转速高、起动力矩大、体积小、重量轻、不易堵转、适用电压范围广,可利用调压来调速来实现吸尘功能。
3.4 行走电机行走电机采用差动结构,利用单片机产生的PWM波进而通过L298P芯片驱动两个减速电机运转,行走电机主要是通过控制PWM的占空比来实现加速减速。
3.5 WIFI模块WIFI模块使用的是ESP8266,它是一款超低功耗的UARTWIFI传输模块,体积小,稳定性好,专为移动设备和物联网应用设计,可将用户的物理设备连接到WIFI无线网络上,从而使设备和APP之间进行通信。
3.6 超声波模块超声波模块:采用HCSR04具有精度强体积小的优点,用于检测障碍物距离和角度。
单片机控制的智能清洁机器人的设计
单片机控制的智能清洁机器人的设计摘要:介绍了一种基于单片机控制的室内智能清洁机器人,机器人的主控芯片采用AT89C51,由行走机构、传感系统、清洁系统和控制系统四个部分组成,可以在一般的家庭环境下自动运行,完成扫地、吸尘、抹地等工作,代替人完成各种清洁任务。
关键词:单片机控制智能清洁机器人室内地面的清洁工作繁琐耗时,随着现代人生活质量的提高和工作节奏的加快,人们迫切希望摆脱这种枯燥的家务劳动,近年来,用机器人代替人完成清洁工作引起了大家的关注。
室内智能清洁机器人是一种新型的居室小家电产品,它不需要人类的监督,能自主运行,集打扫、吸尘、抹地为一体,可自动避开障碍物等功能。
在日本、美国等发达国家,都在致力于研究和广泛使用这种机器人,但国内的产品相对比较滞后。
当机器人的性价比进一步提高,那么清洁机器人进入家庭将具有广阔的市场前景。
1、室内智能清洁机器人的设计思路清洁机器人主要包括行走机构、传感系统、清洁系统和控制系统四个部分。
行走机构能保证机器人在地面上移动,采用轮式结构。
为了简便起见,选择两个驱动轮和一个万向轮组成。
清洁系统由清扫、吸尘、擦地三步完成,吸尘机构在原理上与传统吸尘器相同,主要考虑是更合理的选择和布置元器件,克服传统吸尘器噪音大的缺点,使机器人工作时,不会对用户造成干扰,营造舒适的居室环境。
在机器人车身的后部设置一个滚刷和垃圾盒,配合吸尘器完成清洁和储存垃圾的工作。
由于单片机性价比高,体积小,控制功能强,故采用单片机来控制清洁机器人,由传感器感知外部环境,这里选择简单又实用的碰撞传感器,单片机接受传感器的信号,感知环境并执行相应的控制程序。
考虑到单片机的容量和计算速度都很有限,采用了碰撞到障碍物就后退一定距离,然后右转90°的方法,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作[2]。
2、实现过程2.1 清洁机器人行走机构清洁机器人行走机构的动力部分采用的是步进电机,机身的正前方有一个万向轮,左右两边分别布置两个后轮,两个步进电机分别通过齿轮传动带动两边的后轮运动。
基于STC15系列单片机的智能垃圾桶的设计
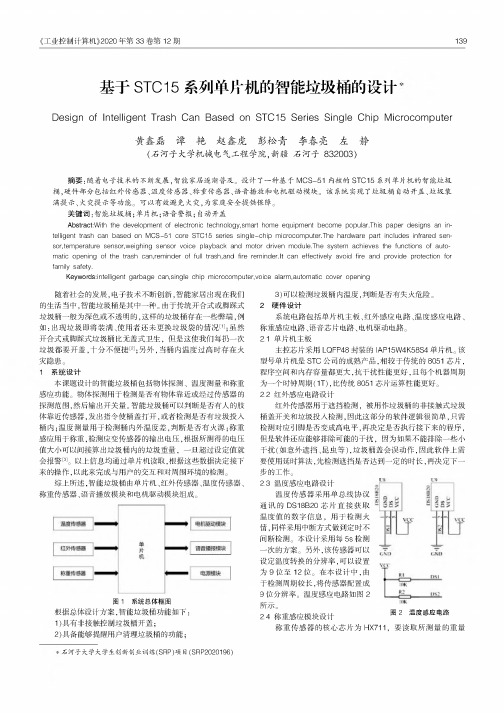
《工业控制计算机》2020年第33卷第12期139基于STC15系列单片机的智能垃圾桶的设计Design of laTelligeat Trash Can Based on STC15 Series Single Chip MicrocompuTer黄鑫磊谭艳赵鑫虎彭松青李春亮左静(石河子大学机械电气工程学院,新疆石河子83(003)摘要:随着电子技术的不断发展,智能家居逐渐普及。
设计了一种基于MCS-51内核的STC15系列单片机的智能垃圾 桶,硬件部分包括红外传感器、温度传感器、称重传感器、语音播放和电机驱动模块。
该系统实现了垃圾桶自动开盖、垃圾装满提示、火灾提示等功能。
可以有效避免火灾,为家庭安全提供保障。
关键词:智能垃圾桶;单片机;语音警报;自动开盖Abstract :With the development of electronic technology,smart home equipment become popular.This paper designs sn in telligent trash can based on MCS-51 core STC15 series single-chip microcomputer.The hardware part includes infrared sen-sor,temperature sensor,weighing sensor voice playback knd motor driven module.The system achieves the functions ofuto- matic opening of the trash can,reminder of full trash,and fire reminder.lt can effectively yvoid fire and provide protection forfamily safety.Keywords :intelligent garbage can,single chip microcomputer,voice Qlarm,automatic cover opening随着社会的发展,电子技术不断创新,智能家居岀现在我们 的生活当中,智能垃圾桶是其中一种。
基于STC15单片机的智能猫砂盆

基于STC15单片机的智能猫砂盆摘要近年来由于猫文化的兴起,导致越来越多的人愿意选择猫咪作为家养宠物。
而在现代科学的众多领域中,自动控制技术也起着越来越重要的作用,本项目通过将自动化与养宠相结合,区别于传统养宠模式。
现如今,猫砂盆形状虽各式各样但都不够智能化,需要主人时经几个小时就需要清理一次,并且无法从根本上除味抑菌,给猫咪的身体健康带来一些隐患并且影响到家庭的清洁程度。
为此,我们基于单片机设计一款能够自动清洁猫咪排泄物且全天杀菌除味的智能猫砂盆,为广大养猫咪的家庭带来一份便捷和舒心。
关键词:宠物用具宠物猫猫砂盆 STC15一、项目研究现状与分析市场分析:•普通型:防臭性差、防带砂程度差、手动更砂•市场款:价格相对更高、存在猫砂团沾底、难以拆卸清理、滚筒型结构设计款的猫砂盆和市场上现有的各种款式的猫砂盆相比,具有更大的优势。
可以智能化管理猫砂盆,让主人和猫咪都有更好的体验感,尤其针对私人时间不充足“铲屎官”的痛点,让猫砂盆清洁不再是一种负担。
而对于一些智能猫砂盆来说,本设计可以通过触发装置及时自动剔除使用过得猫砂,并且在价格上更加有优势,让更多普通家庭得以购买使用。
将会有很大的市场前景。
二、总体设计(一)设计原理用红外技术采集有效数据,经处理可视化于led屏与手机小程序;利用4988驱动控制对应无刷步进电机和舵机(二)设计方案通过调控红外热释传感器,红外传感器,在0.96寸oled显示屏上显示有效数据和工作模式。
同时利用A4988驱动两个无刷步进电机和一个舵机,使得猫砂盆正常运作。
其中,调整舵机角度可以使猫砂团顺利铲除进收集口内,便于主人一次性清理所有猫砂团。
此外留有电压转接口,便于接入家用电源。
外接ESP8266,搭建专属服务器,可以远程操控猫砂盆运作,开发有对应微信小程序,数据可视化。
三、项目研究内容和目标项目研究内容:1、半封闭设计为迎合猫咪天性的半封闭形态,使得如厕时空气流通,可用面积更宽阔,猫咪更加喜爱。
高空窗户清洁机器人
高空窗户清洁机器人
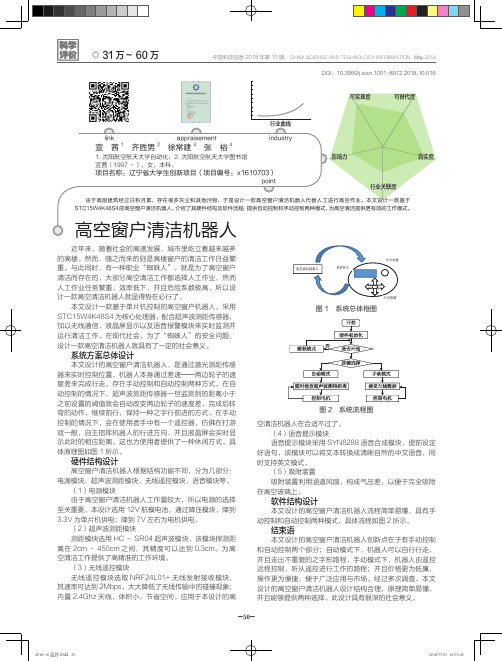
近年来,随着社会的高速发展,城市里屹立着越来越多 的高楼。然而,随之而来的则是高楼窗户的清洁工作日益繁 重。与此同时,有一种职业“蜘蛛人”,就是为了高空窗户 清洁而存在的,大部分高空清洁工作都选择人工作业,然而 人工作业任务繁重,效率低下,并且危险系数极高。所以设 计一款高空清洁机器人就显得势在必行了。
本文设计一款基于单片机控制的高空窗户机器人。采用 STC15W4K48S4 为核心处理器,配合超声波测距传感器, 加以无线通信,液晶屏显示以及语音报警模块来实时监测并 运行清洁工作。在现代社会,为了“蜘蛛人”的安全问题, 设计一款高空清洁机器人就具有了一定的社会意义。
系统方案总体设计
本文设计的高空窗户清洁机器人,是通过激光测距传感 器来实时控制位置,机器人本身通过差速——两边轮子的速 度差来完成行走。存在手动控制和自动控制两种方式。在自 动控制的情况下,超声波测距传感器一旦监测到的距离小于 之前设置的阈值就会自动改变两边轮子的速度差,完成后转 弯的动作,继续前行,保持一种之字行前进的方式。在手动 控制的情况下,会在使用者手中有一个遥控器,仿佛在打游 戏一般,自主指挥机器人的行进方向,并且液晶屏会实时显 示此时的相应距离。这也为使用者提供了一种休闲方式。具 体原理图如图 1 所示。
图 1 系统总体框图
图 2 系统流程图 空清洁机器人在合适不过了。
(4)语音提示模块 语音提示模块采用 SYN6288 语音合成模块,提前设定 好语句,该模块可以将文本转换成清晰自然的中文语音,同 时支持英文模式。 (5)吸附装置 吸附装置利用涵道风扇,构成气压差,以便于完全吸附 在高空玻璃上。
◎ 31 万~ 60 万
中国科技信息 2018 年第 10 期·CHINA SCIENCE AND TECHNOLOGY INFORMATION May.2018 DOI:10.3969/j.issn.1001- 8972.2018.10.016
基于单片机的智能清洁机器人的设计

2020.23科学技术创新基于单片机的智能清洁机器人的设计杜春明于桂君刘佳宁张思宇(辽宁科技学院电信学院,辽宁本溪117004)1概述伴随社会的逐渐发展,人们越来越追求更加舒适的居家生活,但繁重的日常清洁,又成为了人们非常困扰的问题。
智能清洁机器人的出现无疑可以有效解决这个难题,逐渐地替代常规手动清扫工具[1]。
智能清洁机器人是一个具有自动控制的家用清扫工具,较适合于家庭居住面积比较大的居家环境,可以有效的减少人们劳动清扫时间,提高清扫效率。
本文将介绍一款基于AT89C52单片机的清洁机器人的软硬件设计。
2系统总体设计本设计是基于AT89C52单片机芯片作为核心,采用四节1.5V的电池为系统供电。
采用红外遥控装置,通过按键控制智能清洁机器人的各种转向。
采用红外线传感器装于车的左右两端实现避障功能;采用红外对管,装于车底盘的两侧,实现黑线循迹功能。
利用双直流减速电机进行驱动,并配有单个万向轮安装于后方中下端,方便进行任何方向的驱动。
采用L298N电机驱动芯片驱动直流电机,并运用PWM脉冲宽度调制技术对电机的转速进行控制。
采用LED数码管进行模式显示。
清洁模块主要采用单个吸尘器电机进行路面清洁,通过吸尘器电机的风机叶轮旋转吸起尘土,经过吸口吸入带有过滤网的集尘盒内。
系统总体框图如图1所示。
图1系统总体框图3系统硬件设计3.1单片机最小应用系统AT89C52单片机的最小系统,主要由时钟电路和复位电路组成。
电容C11和电阻R1构成上电复位电路,电容C11可滤除高频干扰,防止单片机误复位;添加按键构成手动复位电路。
单片机复位需在RST引脚输入至少持续两个机器周期(24个振荡周期)以上的高电平[2]。
EA引脚接高电平。
如图2所示。
3.2电源电路采用四节1.5V的电池作为整个系统的供电电源。
因为各类传感器模块、AT89C52单片机芯片和一位共阳极LED数码管的工作电压为5V,L298N电机驱动芯片的电机驱动控制的电源输入端VS和吸尘器电机的工作电压为12V,所以输入电压VCC (6V)须要经过三端稳压集成电路7805和7812分别降压到5V 和升压到12V才能为整个系统供电。
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)课程设计
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)-课程设计单片机自动清洁机器人设计最近在电视看到一款能够遥控移动的吸尘器,圆形的和遥控汽车差不多,我感觉到如果再不把自己的想法写出来,自己的创意会被很多人实现,我几年前就想设计一款能够打扫卫生的机器人,直到看到电视里的那个东西,我意识到,我要自己做一个出来。
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
现在的智能清洁机器人通过软硬件的合理设计,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
它的主要功能有: 1 能够自动熟悉地形,了解房间布局,感知自己的方位,记录和分析环境卫生状况,容易脏的地方多打扫,干净的地方少打扫,节省能源。
2能够自动补充能量。
当检测到电源不足时,自动找到电源,并充电。
充电结束自动专为待机状态。
3当垃圾装满后自动打包,并将垃圾放到主人指定的地点。
4能够检测主人是否在家,只有当主人不在家时,才出来打扫卫生,主人在家时机器人休息。
保证不影响主人的正常生活。
可行性分析:1应用超声波测距和滚轮定位就可以测到自己的位置,给据吸入垃圾量的多少,就可以分析出,那干净那里脏.2应用简单的空中加油技术就可以把自动充电搞定。
检测电源能量多少,和是否充满就更简单了.3垃圾打包只用简单的打包技术就可以解决.4机器人上装上热释红外探测器就知道主人在不在了..5剩下的功能,好多玩具里都有,只要把吸尘器和遥控车结合起来就搞定了1 系统整体方案设计1.1 制作清洁机器人的任务与要求:任务: 清洁机器人在场地上任意运动并吸尘,当遇到障碍物时,可自主避开障碍物绕道继续运动(轨迹由团队设定)。
基于单片机多功能清洁机器人设计

39. //count=100;while(count--){Delay(10);motor(-25,-25);}//后退1S
40. count=100;while(count--){Delay(25);motor(speed,-speed);}//右转90度
41. count=100;while(count--){Delay(12);motor(speed,speed);}//前进1S
17. uchar flag;
18. uint count,aaa;
19. char speed=52;
20. pwm_init();
21. led1 = 1;
22. led2 = 1;
23. led3 = 1;
33. led2 = 1;
34. led3 = 1;
基于人工智能的自动化清洁机器人设计与实现

基于人工智能的自动化清洁机器人设计与实现自动化清洁机器人是一种基于人工智能的技术创新,它能够通过传感器和算法的结合,主动感知环境中的污垢,并采取相应的措施进行清洁。
本文将为您介绍基于人工智能的自动化清洁机器人的设计与实现的相关内容。
一、智能软件设计1. 环境感知算法为了使清洁机器人能够准确感知环境中的污垢,并做出相应的清洁措施,必须采用高效的环境感知算法。
该算法可以通过利用传感器获取环境信息,并通过对信息的处理和分析,实现对污垢的识别和定位。
常用的环境感知算法有计算机视觉、深度学习等,通过这些算法的应用,清洁机器人可以准确地找到并清洁污垢。
2. 路径规划算法在设计自动化清洁机器人时,路径规划算法的使用是必不可少的。
该算法能够根据环境信息和清洁机器人的运动能力,规划出机器人的清洁路径。
常见的路径规划算法有A*算法、RRT算法等,通过这些算法的运用,清洁机器人可以高效地清扫整个区域,避免重复清洁和错过清洁。
3. 自适应学习算法为了提高清洁机器人的智能化水平,可以采用自适应学习算法。
该算法能够使机器人根据不同的环境情况和清洁任务进行学习,并根据学习结果做出相应的调整。
通过自适应学习算法的应用,清洁机器人可以不断改进清洁效果,提高清洁的准确性和效率。
二、硬件设计1. 传感器传感器是自动化清洁机器人的重要组成部分。
常见的传感器包括激光雷达传感器、摄像头传感器、红外传感器等。
这些传感器能够感知环境中的障碍物、污垢等信息,并将信息传输给智能软件进行处理。
通过合理配置和使用传感器,清洁机器人可以更好地感知环境,完成清洁任务。
2. 运动控制系统运动控制系统是指清洁机器人中的驱动器、电机和控制器等组成部分。
通过这些组件的协同工作,清洁机器人可以进行灵活的移动和精确的定位。
同时,运动控制系统也需要与智能软件进行有效的通信,以实现路径规划和环境感知等功能。
3. 电池和充电系统清洁机器人需要长时间工作,并保持不间断的清洁能力,因此需要一个高效的电池和充电系统。
基于单片机的家用清洁机器人设计

基于单片机的家用清洁机器人设计摘要:提出一种具有全自动,适用于一般家庭中吸尘、倒垃圾、等功能的家用清洁机器人。
整个清洁机器人主要以51 单片机为控制核心,用三个直流电机来驱动整个机器人的行走,四个红外线传感器,一个小型吸尘器、一个伺服电机。
关键词:家用清洁机器人;结构;传感器引言近些年,随着科技的高速发展,不管是在工业生产中还是在生活中都呈现出了高自动化的特点。
在人们生活水平提高的同时,使用机器来代替人做家务,减少人们的劳动量成为了人们的追求。
因此,各种各样的服务型机器人或便捷工具就会随之产生,家用清洁机器人就是其中的一种,它可以让人们摆脱繁琐的劳务。
在很多发达国家,清洁机器人已经很常见,我国才刚刚起步。
随着社会的发展,相信清洁机器人有很好的发展前景。
1 国内外的发展现状国外在这方面起步比我国要早,欧洲以康复机器人为代表的服务机器人方面的研究,起源于 20 世纪 70 年代中期的Spartacus 和Heidelbeg 操作手项目。
时至今日,机器人已经从第一代示教再现机器人、第二代带感觉的机器人发展到最新的第三代智能机器人,而服务机器人正是第三代机器人的典型代表。
目前国外的科学家在移动机构设计、传感器融合与环境建模技术、人机交互技术、路径规划技术、智能控制技术、能源技术等方面都取得了长足的进步。
目前,国内也已开始有关的研究开发工作,特别是在移动机器人的运动规划与控制方面取得了一定的成就,哈尔滨工业大学、华南理工大学、上海交通大学等高校,也对清洁机器人进行了大量的研究,并取得了一些成果,这些都为清洁机器人的研究开发和推广奠定了物质和技术基础,为研究开发清洁机器人奠定了技术基础。
2 总体设计思路为了能够实现机器人的清洁功能,首先需要一个移动平台。
此移动平台要求简单,移动灵活,能够实现全方位的移动。
因此,设计一个三轮车身,用三个直流电机分别驱动一个全向轮。
这样就可以实现任意方向的转动和行驶。
在车的正中央可以安装一个小型吸尘器,此吸尘器用一个直流电机带动一个离心式风机产生负压力以达到吸尘的目的。
毕业论文(设计)基于单片机的智能清洁机器人的设计
1.2 研究意义
随着智能机器人的发展和科研技术的进步,清洁机器人的智能程度也越来越高。智能 化技术的发展速度越来越快,智能化也是未来社会的发展方向。作为现代智能化方向里一 项先进发明,智能清洁机器人已经和人们生产生活的联系越来越密切。
I
The design of intelligent cleaning robot
Abstract
In recent years, with the development of intelligent robots and the technological progress. The cleaning robot is more and more intelligent,and intelligent is the sign of the development of cleaning robot.As the development trend of modern intelligent robot,it has become the research direction of designers.At the same time, intelligent cleaning robot is direction of development in the future.
Keywords: Intelligent cleaning robot, MCU , obstacle avoidance, infrared, vacuum cleaner
基于单片机控制的清扫机器人的设计
物联网技术 2022年 / 第8期1240 引 言进入21世纪以来,随着计算机技术、微电子技术和传感器技术的发展,人们在能实现控制模式的传统机器中添加了处理器,清扫机器人就是其中之一[1]。
然而,无论是在国内还是国外,清洁机器人的价格都偏高。
因此,本课题研究设计了一种智能清洗机器人,该机器人能够进行清洗和避免污染等操作。
本项目设计成本较低,人为干扰少,实用性强,可靠性高,有广阔的发展前景。
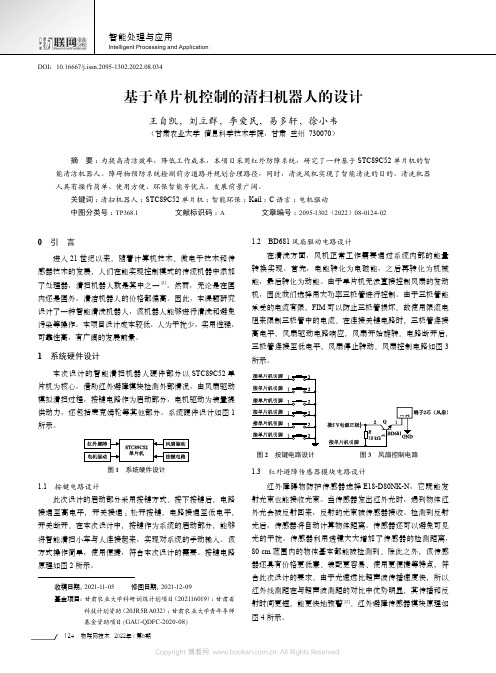
1 系统硬件设计本次设计的智能清扫机器人硬件部分以STC89C52单片机为核心,借助红外避障模块检测外部情况,由风扇驱动模拟清扫过程,按键电路作为启动部分,电机驱动为装置提供动力,还包括麦克姆轮等其他部分。
系统硬件设计如图1 所示。
图1 系统硬件设计1.1 按键电路设计此次设计的启动部分采用按键方式。
按下按键后,电路接通至高电平,开关接通;松开按键,电路接通至低电平,开关断开。
在本次设计中,按键作为系统的启动部分,能够将智能清扫小车与人连接起来,实现对系统的手动输入。
该方式操作简单,使用便捷,符合本次设计的需要。
按键电路原理如图2所示。
1.2 BD681风扇驱动电路设计在清洗方面,风机正常工作需要通过系统内部的能量转换实现。
首先,电能转化为电磁能,之后再转化为机械能,最后转化为动能。
由于单片机无法直接控制风扇的发动机,因此我们选择用大功率三极管进行控制。
由于三极管能承受的电流有限,FIM 可以防止三极管损坏,故使用限流电阻来限制三极管中的电流。
在连接关键电路时,三极管连接高电平,风扇驱动电路响应,风扇开始旋转。
电路断开后,三极管连接至低电平,风扇停止转动。
风扇控制电路如图3 所示。
图2 按键电路设计 图3 风扇控制电路1.3 红外避障传感器模块电路设计红外障碍物防护传感器选择E18-D80NK-N ,它既能发射光束也能接收光束。
当传感器发出红外光时,遇到物体红外光会被反射回来,反射的光束被传感器接收。
检测到反射光后,传感器将自动计算物体距离。
基于机器人技术的智能保洁系统设计

基于机器人技术的智能保洁系统设计一、引言如今,机器人技术已经在不同领域里得到了广泛应用,智能保洁系统作为其中的一种应用形式,已经在商场、餐厅、医院等公共场所里开始起到了越来越重要的作用。
本文将探讨基于机器人技术的智能保洁系统设计。
二、智能保洁系统的概述智能保洁系统是指集成机器人技术、传感器技术、信息技术等多种技术的一种智能化保洁服务系统。
智能保洁系统使用机器人代替传统保洁员的手工清洁工作,保证了清洁效率,而且在过程中减少了污染风险。
与此同时,智能保洁系统还能提供定制化的保洁服务,并且具有数据分析和远程监控等功能。
三、智能保洁系统的设计1.硬件设计智能保洁系统硬件设计主要包括机器人、传感器、地图制作和通信功能等。
机器人是智能保洁系统的核心,需要具有自主性、可编程性、自适应性和可扩展性等特点。
在机器人系统中,硬件方面的要求包括强大的计算能力,高精度的导航能力和精确的执行能力。
机器人应当具备人机交互界面,使得保洁服务更为便捷。
传感器的作用是感受环境信息和提供数据反馈,主要包括视觉传感器、声音传感器、温度传感器、湿度传感器、行进轮传感器等。
使用传感器可以使得机器人获取地面状况、负载、光线和交通情况等多方面信息,更好地完成保洁任务。
地图设计是实现智能保洁系统导航、路径规划等任务的基础。
地图设计应符合机器人扫地机器人的设计和地面状况布局,为机器人规划行走路径提供基础数据。
因此,地图制作是机器人导航控制的核心,影响着整个智能保洁系统的工作效率。
通信功能是保证智能保洁系统实时控制和远程监控的重要因素。
通信系统方便地传输清洁过程中的数据,同时还能将追踪和诊断信息传递回现场和维护团队。
2.软件设计软件是智能保洁系统的核心部分,主要包括操作系统、控制算法、数据处理和监控等。
机器人的程序应当结合多种作业方式使用,针对不同的使用环境,可以进行人工辅助、自主巡航和智能规划等模式。
同时,程序也要能够应付突发情况,如障碍物的出现等。
基于STC单片机的水面清洁智能小卫士模型的设计
26 | 电子制作 2021年04月断提高,研制出一种结构简单、安全平稳、节能高效的远程操控清洁工具已成为一大热点。
为了解决小型景区湖泊水面垃圾问题,以STC15w4K58S4单片机为核心,融合了无线远程操控,无线图像传输,传送带式捕获垃圾等功能,设计出这样一款清理装置模型——小卫士。
目前,小卫士主要针对水面漂浮物将其收集、运送、装载,全过程只需人在湖边遥控小卫士,就可做到定点回收湖面上的垃圾,且其工作不对环境造成污染。
1 小卫士系统主要结构组成小卫士主要由船体、电气控制系统、水面漂浮物打捞系统、水面视频监测系统四个部分组成。
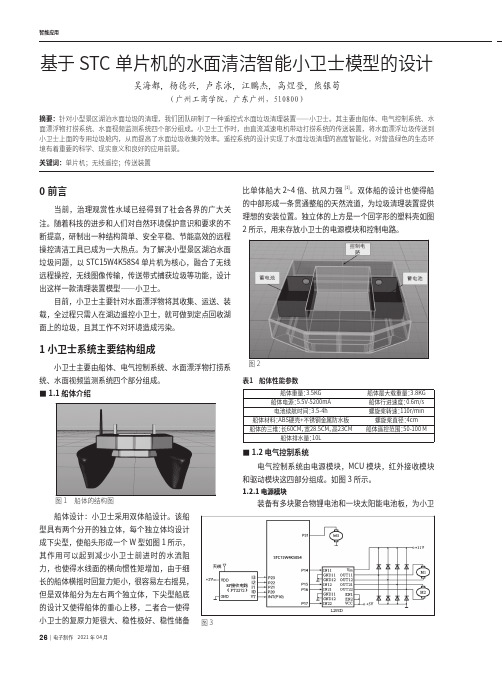
■1.1 船体介绍图1 船体的结构图船体设计:小卫士采用双体船设计。
该船型具有两个分开的独立体,每个独立体均设计成下尖型,使船头形成一个w 型如图1所示,其作用可以起到减少小卫士前进时的水流阻力,也使得水线面的横向惯性矩增加,由于细长的船体横摇时回复力矩小,很容易左右摇晃,但是双体船分为左右两个独立体,下尖型船底的设计又使得船体的重心上移,二者合一使得小卫士的复原力矩很大、稳性极好、稳性储备2所示,用来存放小卫士的电源模块和控制电路。
图2表1 船体性能参数船体重量:3�5KG 船体最大载重量:3�8KG 船体电源:5�5V-5200mA船体行进速度:0�6m/s电池续航时间:3�5-4h螺旋桨转速:110r/min 船体材料:ABS硬壳+不锈钢金属防水板螺旋桨直径:4cm 船体的三维:长60CM,宽28�5CM,高23CM 船体遥控范围:50-100 M船体排水量:10L ■1.2 电气控制系统电气控制系统由电源模块,MCU 模块,红外接收模块和驱动模块这四部分组成。
如图3所示。
1.2.1 电源模块装备有多块聚合物锂电池和一块太阳能电池板,为小卫图3智能应用士供电。
整个系统的供电以可充电锂电池电为主,以太阳能电池板发电补充电能为辅的系统。
本系统采用单晶硅太阳能电池板吸收太阳光转换成电能,其转换效率比其他类型的太阳能电池板更高,并且使用寿命也较长,可以大大提高太阳光的有效利用率和系统的稳定性。
基于STC单片机的空调清理机器人设计
圈 3 继 电 器 I 路 图
3.3电源 稳压 电 路 设 计 IU源 稳 Hi电路 给 空 调 清 卵 饥 人 系统 提 供 、 流 、
低 波 稳 的 电 源 lu 。5V 稳 ¨| 源 电路 女…冬f 4所 示 。
【;
图 4 5V稳 压 电源 系统 电路 图
Jfj hn78系 列 端 稳 1C米 成 稳 电 源 }i= JI= 的 外 厄 件 少 ,I 路 1人】邴 还 过 流 、过 热 技 州 整 管 的 护 } 路 。 在 他
川时 确· .可靠 ,他川 力’便 。此 的集成稳 芯” lm78xx,XX
代 表的数字 表,J÷此稳 芯 片 稳¨{}U路 中的 IU 输 值 ,
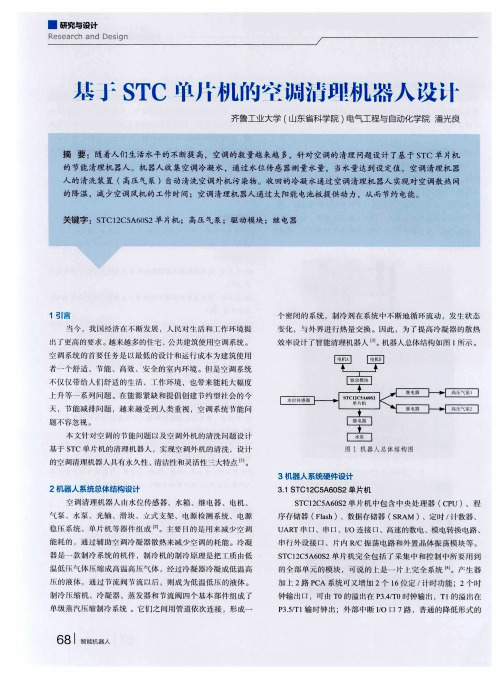
气 泵、水泵 、光轴 、滑块 、立 式支架 、电源检测 系统 、电源 稳压 系统 、单 片机等器 件组成 】。主要 目的是用来 减少空调 能耗 的 ,通过辅 助空调 冷凝器散热来 减少空调 的耗能 。冷凝 器 是 一款制 冷系统 的机件 ,制冷机 的制冷原理 是把lT质 由低 温低 压气体 压缩成高 温高压气体 ,经 过冷凝器 冷凝成低 温高
图 1机 器 人 总 体 结 构 图
3机 器 人 系统 硬件 设 计 31 STC12C5A60S2单 片 机
STC12C5A60S2单片 机中包 含 中央处 理器 (CPU)、程 序仔储器 (Flash)、数据 存储 器 (SRAM )、定时 nf』数器 、 UART串 『]、串口、I/O连接 口、高速的数电 、模电转换电路 、 串行外设 接 口、片 内 R/C振 荡电路 和外置 晶体振 荡模块 等 。 STCI2C5A60S2单 片 机 完 全 包 括 了 采 集 中 和 控 制 中 所 要 用 到 的 伞部 元 的模 块 ,可说 的 是 一 片 卜完全 系统 【4】。产生器 加 卜2路 PCA 系统 可又增加 2个 l6位定 /计 时功能 :2个时 钟输 出 厂】,可 南 TO的溢 m在 P3.4/'I"0时钟输出 ,T1的溢 在 P3.5/T1输 时 钟 m ; 外部 中 断 I/O 口 7路 ,普 通 的 降 低 形 式 的
扫地机器人自动清洗设计
摘要目前,机器人在人类生活中的应用越来越多,从事与人们生活密切相关的服务,不仅可以提高人们的生活水平和生活质量,智能室内清洁机器人就是在这种背景下发展起来的一种家用清洁机器人。
本文的主要任务是设计和制造一种功能简单的扫雷机器人。
本文详细介绍了智能扫雷艇的总体设计,主要由以stc51单片机为核心的主控部分、以L298N单片机为核心的驱动部分和以单片机为核心的智能扫雷艇系统的硬件设计组成。
红外传感器主要用于避障,地面清扫机器人采用吸力式。
电机带动毛刷沿毛刷边缘扫至排风机吸入口,将灰尘等杂物吸入灰仓进行地面清扫。
关键词智能扫地机器人;STC51单片机;红外避障AbstractAt present, more and more kinds of robot is applied in human life,and it is engaged in the service class which has the close relation with people's life. The development of the robot can not only improve the living standard and living quality of human being, but also can reduce the labor force, and come to the liberation of people's hand. Indoor intelligent cleaning robot is generated from the background of a home service robot model. This task is mainly to design and produce a simple cleaning robot, which can achieve autonomous work, can be remote control, as well as possess the ability to return to charge and infrared obstacle avoidance and other functions. Besides, the intelligent indoor sweeping robot's overall design schemes are introduced in this paper. The robot mainly can be controlled by stc51 MCU master, and can be dominated by L298N driving part and etc. We can achieve those functions by the C language programming of the hardware. The sweeping robot uses absorber and sweeper type. The side brushes which are driven by the motor side brushes will take the sundries to exhaust fan ceiling outlet, in order to suck dust and debris into the dust storage box and achieve on the ground cleaning.Keywords Intelligent sweeping robot STC51 MCU Infrared barrie目录摘要 (I)Abstract (II)1绪论 (1)1.1 发展背景 (1)1.2 国内外研究现状 (1)1.3 研究的目的和意义 (2)1.4 本课题的主要研究内容 (3)2 智能扫地机器人整体方案设计 (4)2.1 机械部分方案设计 (4)2.2 控制系统方案设计 (5)2.2.1 主控系统方案设计 (5)2.2.2 驱动电路方案设计 (5)2.2.3 传感器方案设计 (6)2.2.4 电源电路方案设计 (6)2.3 软件方案设计 (6)3 机械部分设计 (7)3.1 行走机构 (7)3.2 吸扫机构 (8)3.3 底盘设计 (9)3.4 充电座设计 (9)4 智能扫地机器人的软件设计 (11)4.1 软件总体设计 (11)4.2 初始化程序 (11)4.3 主程序设计 (11)4.4 红外避障程序设计 (12)4.5 防跌落程序设计 (13)4.6 蓝牙遥控程序设计 (14)4.7 自动充电程序设计 (15)5 机械结构的设计 (17)6 扫地机器人的三维建模 (20)7系统仿真程序设计 (22)7.1设计任务 (22)7.2系统整体框图 (22)7.3 选择方案论证 (23)7.3.1单片机选择方案论证 (23)7.3.2 驱动芯片选择方案论证 (23)7.3.3无线模块选择方案论证 (24)7.3.4时钟模块选择方案论证 (24)7.4硬件电路设计 (24)7.4.1独立式键盘设计 (24)7.4.2蜂鸣器报警电路 (25)7.4.3移动驱动电路 (26)7.4.4清扫电机驱动电路 (28)7.4.5超声波测距模块 (28)7.4.6红外模块 (29)7.4.7无线通信模块 (30)7.4.8电量剩余检测电路 (31)7.4.9降压电路 (33)7.5软件设计 (34)7.5.1主程序设计 (34)7.5.2清扫模式设计 (34)7.5.3充电模式程序设计 (35)7.5.4停止模式程序设计 (35)8 三维软件设计总结 (37)结论 (40)致谢.................................................................................................................. 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于STC15的智能清洁机器人设计
作者:唐琳何世超
来源:《科技风》2017年第05期
摘要:针对目前繁琐的家庭日常清洁问题,提出了以STC15F2K60S2单片机为核心控制器,辅以电源模块、驱动模块、传感器模块设计,研究设计一台智能地面清洁机器人。
完成并经测试后,样机可实现自动识别工作环境,自动清扫纸屑和灰尘等功能,达到智能清扫机器人设计要求。
关键词:智能清洁;扫地机器人
随着科学技术的进步和社会发展,特别是受生活节奏的加快和工作压力的增大影响,人们希望更多地从繁琐的家庭日常清洁事务中解脱出来。
伴着越来越多智能家电如雨后春笋般地涌现,智能地面清洁机器人也逐渐进入我们的家庭,构建智能化生活。
智能地面清洁机器人是一款能对较为平整的地面进行清洁的机器人,具有自动识别工作环境、自行清扫、吸尘及拖地等功能。
本文主要从电源模块、电机驱动模块、传感器模块等方面,来阐述智能清洁机器人的设计与实现。
1 总体设计
智能地面清洁机器人是一款将扫地、洗尘、拖地集于一体的多功能型智能清洁机器人,它不仅仅只是将人们从繁琐的家庭日常清洁工作中解放出来,更是我们构建智能家居生活的重要组成部分。
该机器人具有自动避开障碍物、实时显示使用电量、拥有多途径多方式的打扫方式、自我保护、智能防撞防跌落等功能。
比如当我们选择采用刷扫方式时,智能清洁机器人可自行将地面上的所有杂物吸纳进入其所携带的垃圾收纳盒,从而完成地面清洁工作。
智能清洁机器人的外形是采用扁平式的圆柱形,这样的设计可以大大提高它的工作环境适应性,避免在工作中出现被卡死、被架空等现象。
它的内部则由电源模块、电机驱动模块、控制模块、传感器模块以及清扫模块构成,其总体设计原理如图1所示。
由图1可知,STC15F2K60S2单片机作为智能清洁机器人的核心处理器,它通过传感器模块来识别工作环境,收集和处理传感器返回的数据,进而控制各电机的运行来实现全方位无死角清扫和实现主动避障及防跌落等功能。
为了更好地了解智能清洁机器人的工作原理,将对其构成的主要模块做以下分析和介绍。
1.1 电源模块
各个模块所需要的电压大小各不相同,同时考虑到实用性,本设计中将选用可充电18650锂电池作为提供电压给各个模块的总电源。
由于各个模块的稳定电压有所不同,故利用
LM2940-5和LM2575或LM2596-5对总电源进行稳压处理后才分别给各模块供电。
具体的供电方式有以下三种:
①采用稳压芯片LM2940进行稳压,使其输出5V电压,给主控模块供电。
②采用稳压芯片LM2575或LM2596-5进行稳压,使其输出5V电压,给传感器模块供电。
③采用开关型稳压芯片LM2596进行稳压,以可调输出电压方式使其输出7.2V电压,给驱动模块供电。
1.2 驱动模块
电机驱动电路由半桥驱动芯片IR2104S和MOS管IR7843共同搭建设计而成,为直流减速电机提供驱动动力。
主控模块可以通过PWM调节占空比的方式来控制直流减速电机,达到控制机器人的运动前进、后退、左转、右转的目的。
电机驱动电路如图2所示。
1.3 传感器模块
传感器部分包括两个模块:红外传感器模块和超声波模块。
这个两个模块的主要作用是采集机器人周围环境的数据信息,并将此信息传至STC15F2K60S2单片机进行处理,从而发出相应控制指令,用以控制电机的正转、反转、加速减速以及启动停止。
超声波模块的主要作用是识别前端障碍物和计算距离,实现避障功能。
即当前进方向有障碍物阻挡,超声波模块向主控模块发送信号,主控模块根据收到的数据觉得采用哪种处理方式。
而红外线模块的作用则是用于识别机身两侧障碍物和识别机身前端的底盘下方悬崖。
当智能清洁机器人在工作中行至至悬崖或处于悬空状态时,红外线模块将采集到相应的数据,反馈给主控模块进行险情处理。
2 结语
通过对电源模块、驱动模块、传感器模块等功能模块的分析与研究,实现了各功能模块的设计要求,完成了智能清洁机器人的设计。
这个设计可以使得机器人按照我们设定的处理方式进行智能清扫工作,工作过程中可以自动感知和自主避开障碍物,自动完成清除杂物、吸尘、拖地等功能,达到设计要求。
参考文献:
[1] 刘平.STC15单片机实战指南(C语言版).北京:清华大学出版社,2016.
[2] 张志勇.现代传感器原理及应用.北京:电子工业出版社,2014.1
[3] 余伶俐.导航机器人传感器融合、异常诊断及任务规划方法.北京:电子工业出版社,2015.
[4] 郭彤颖,张辉.机器人传感器及其信息融合技术.北京:化学工业出版社,2017.。