基于ZYNQSoC的多轴运动控制系统方案
基于Zynq SoC的EtherCAT主站设计及实现

No. 7Jul ・ 2020第7期2020年7月组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing Techinnue文章编号 #1001 -2265(2020)07 -0122 -05DOI : 10.13462/j. cnki. mmtamt. 2020. 07. 028基于Zynq SoC 的EtterCAT 主站设计及实现*收稿日期#2019 -08 -24*基金项目:广东省重点领域研发计划项目(2019B090918002);高档数控机床与基[制造装备(2018ZX04006001 - 010)作者简介:马平(1968-),男,湖南汨罗人,广东工业大学教授,博士,研究方向为高速数控机床关键技术、超精密驱动进给技术,(E-mail ) pingma@gdue edu. cn ;通讯作者:苏攀杰(1994—),男,广东湛江人,广东工业大学硕士研究生,研究方向为嵌人式系统、工业现场通信,(E- mail ) vickers_su@ 163. com#马 平1 #苏攀杰1,刘胜旺1,邓龙军2(1.广东工业大学机电工程学院,广州510006;2.广州数控设备有限公司,广州510535)摘要#为了在高端数控系统中实施高性能的Ether/AT 总线,提出了一种基于Zynq-7000 SoC 的Eth- rCAT 主站构建方案。
首先基于Zynq-7000硬件平台,运用系统模块化设计方法对Ether/AT 主站 进行总体方案规划,然后基于电子设计平台Vivado 设计主站的硬件工程,接着在CPU0上搭建Far eRTOS 操作系统,在此基础上移植了开源主站库! SOEM-1.3.3)并对网卡驱动进行优化,最后建立了 Ether/AT 主站测试系统。
实验结果表明,该主站的周期通信时间约为40&#通信抖动为纳秒级, 具有较高的实时性和稳定性。
《基于ZynQ嵌入式平台的工控通信单元设计与实现》

《基于ZynQ嵌入式平台的工控通信单元设计与实现》一、引言随着工业自动化与信息化的不断融合,工控系统在工业生产中的地位愈发重要。
作为工控系统的关键组成部分,工控通信单元承担着数据传输、信息交互等重要任务。
ZynQ嵌入式平台因其高性能、低功耗等优点,在工控通信单元的设计与实现中得到了广泛应用。
本文将详细介绍基于ZynQ嵌入式平台的工控通信单元设计与实现过程。
二、系统设计1. 硬件设计基于ZynQ嵌入式平台的工控通信单元硬件设计主要包括处理器、内存、接口电路等部分。
其中,处理器采用ZynQ系列芯片,具备高性能、低功耗的特点,可满足工控通信单元的实时性要求。
内存方面,选用适当的DDR存储器,以满足系统数据存储需求。
接口电路包括以太网接口、串口、USB接口等,用于实现与上位机、其他设备的数据传输与通信。
2. 软件设计软件设计部分主要包括操作系统、通信协议、数据处理等。
操作系统选用适用于嵌入式系统的实时操作系统,以保证系统的实时性和稳定性。
通信协议采用工业标准的通信协议,如Modbus、CAN等,以实现与其他设备的无缝连接。
数据处理部分负责数据的采集、处理、存储与传输,需确保数据的准确性和可靠性。
三、通信单元实现1. 通信接口实现根据工控系统的需求,实现以太网接口、串口、USB接口等通信接口。
以太网接口采用TCP/IP协议,实现网络数据的传输与接收。
串口和USB接口则用于与其他设备进行数据交换。
在接口实现过程中,需考虑数据的编码与解码、数据的传输速率等因素,以保证通信的稳定性和可靠性。
2. 数据处理与传输数据处理与传输是工控通信单元的核心功能。
在数据处理方面,需对采集到的数据进行预处理、滤波、计算等操作,以保证数据的准确性和可靠性。
在数据传输方面,需根据通信协议将数据封装成相应的数据帧,并通过通信接口发送给上位机或其他设备。
同时,还需考虑数据的实时性、传输速率等因素,以满足工控系统的需求。
四、系统测试与优化1. 系统测试在系统测试阶段,需对工控通信单元的各项功能进行测试,包括硬件性能测试、软件功能测试、通信性能测试等。
基于ZYNQSoC交流伺服控制系统设计
3 1 推动 上下 级调度 工作 协调 化
精益 化调度主 要是 为了强 化 电网的调 度管理 工作 , 有效 防止调度 管理过程 中出现 的重复 性建设 和无效 劳动 , 通过将 生产运 行建立 在科学合 理的组 织与 制 度 的基础 上来 优化 电网调度 工作 , 确保调 度运行 、 保护、 通 信等业 务在上 下级调 度 工作 中充分有 效协 调 。 在推 动精 益化调 度管 理工 作实 现 中, 重视 上下 级企业 之间的沟通 , 通过统一电力系统办公设备来实现信息的交流与共享, 从而为上 下级调 度 工作 的协 调化 建立 技 术保 障 。 3 . 2 加 大 与社 会企 业 、 用 户 以及政 府部 门协调 力度 调度 管理部 门是 电力行业 中重要 的部 门, 同 时在 生产链 上也处于 十分重要 的位置, 只有保障产业链中的调动管理工作能够做到最优化才能够有效地促进 电力行业运行效率的提高以及 电力企业经济效益的最大化 。 因此, 建立并重视 与 电力行 业 紧密相 关的社会 企业 之间的业 务 , 确 保在能 源供求量 增大 的背景 下 实现水 、 电、 煤 等资源 的协调 , 优化 与用 户之 间的协作 方式 , 合理使 用能源 , 确保 电能有 效供 给 , 提 高用 电客户 的支持 程度 , 加强 与政府 智 能 电 网的概 述 智 能电 网是指 电网在运行 过程 中, 通过 随时监控 电网 中的每 一个节点 和用 电客户 , 实 现信息 和 电流 的双 向传递 , 发挥 电力系 统综合 效益最 大化 。 自动 控制 系统 、 宽带通 信 、 分布 式智能 是智能 电网 的主要组 成部分 , 充分 发挥智 能 电网的 每 个部 件 , 实时进 行信 , 息 双 向传 递有着 重大 意义。 传感器 在智 能电 网中将配 电 发 电、 输 电等设备 组织形 成总 线网络 , 并对 每个节 点实施 监控 , 确保智 能 电网运 行 过程 的 可靠性 , 并对 电网数 据进 行分 析与处 理 , 数据 处理 结果 传递 到智 能系
Zynq SoC多处理器的两个ARMA9内核的通信与存储

Zynq SoC多处理器的两个ARMA9内核的通信与存
储
利用赛灵思Zynq SoC 上的两个ARM A9 内核可以显着提高您的系统性能。
赛灵思Zynq®-7000 全可编程SoC 的众多优势之一就是拥有两个ARM® Cortex ™ -A9板载处理器。
不过,很多裸机应用和更为简单的操作系统只使用Zynq SoC 处理系统(PS)中两个ARM 内核中的一个,这种设计方案可能会限制系统性能。
根据所开发的应用类型不同,可能需要这两个处理器都运行裸机应用,或者需要在每个处理器上运行不同的操作系统。
例如,其中一个处理器执行关键计算任务,从而运行裸机/RTOS 应用,同时第二个处理器通过Linux 提供HMI 和通信功能。
什幺是多处理?
这两种方案都属于多处理。
简单定义:多处理就是在一个系统中使用一个以上的处理器。
多处理架构可允许一次执行多个指令,但并非必须如此。
《基于ZynQ嵌入式平台的工控通信单元设计与实现》
《基于ZynQ嵌入式平台的工控通信单元设计与实现》一、引言随着工业自动化和智能化程度的不断提高,工控系统在各行各业的应用日益广泛。
其中,通信单元作为工控系统的关键组成部分,其设计与实现的重要性不言而喻。
本文旨在介绍一种基于ZynQ嵌入式平台的工控通信单元的设计与实现方法,以提高工控系统的通信效率、稳定性和可靠性。
二、ZynQ嵌入式平台概述ZynQ嵌入式平台是一种基于Xilinx公司Zynq系列芯片的嵌入式系统,具有高性能、低功耗、可扩展性强等优点。
其硬件架构包括可编程逻辑部分(FPGA)和ARM处理器部分,可满足各种复杂的工业控制需求。
因此,选用ZynQ嵌入式平台作为工控通信单元的设计基础,具有良好的应用前景。
三、工控通信单元设计1. 需求分析在工控系统中,通信单元需要实现与各种传感器、执行器、上位机等设备的通信。
因此,设计时需考虑通信协议的多样性、通信速度、实时性、可靠性等因素。
同时,还需考虑系统的可扩展性和维护性。
2. 硬件设计硬件设计主要包括ZynQ嵌入式平台的选择、接口电路的设计、电源电路的设计等。
在选型时,需根据实际需求选择合适的ZynQ芯片型号。
接口电路设计时,需考虑与各种传感器、执行器、上位机等设备的接口类型和通信速率。
电源电路设计需保证系统的稳定供电。
3. 软件设计软件设计包括操作系统选择、通信协议实现、驱动程序编写等。
选用适合ZynQ嵌入式平台的操作系统,如Linux或RTOS。
根据实际需求选择合适的通信协议,如CAN、Modbus、TCP/IP 等,并实现相应的通信协议栈。
编写设备驱动程序,实现与各种传感器、执行器等设备的通信。
四、工控通信单元实现1. 通信协议的实现根据需求分析中确定的通信协议,编写相应的协议栈。
以CAN协议为例,需实现CAN控制器驱动、CAN消息编码解码等功能。
对于其他协议,如Modbus、TCP/IP等,同样需要实现相应的协议栈。
2. 设备驱动的编写根据硬件设计中的接口类型和通信速率,编写相应的设备驱动程序。
基于ZYNQ SoC交流伺服控制系统设计
基于ZYNQ SoC交流伺服控制系统设计作者:陈剑来源:《中国科技博览》2014年第19期[摘要]介绍了一种基于ZYNQ SoC交流伺服控制系统设计。
针对伺服驱动系统高速度、高精度的要求,传统控制方法很难对其实施有效控制。
利用 ZYNQ SoC高速并行处理的特点,和丰富的逻辑资源进行各种PID控制参数的模糊控制。
实现 SoC ( System on a Chip )高性能交流伺服系统。
[关键词]交流伺服控制系统设计中图分类号:F569.3 文献标识码:A 文章编号:1009-914X(2014)19-0006-020.引言随着高性能微处理器在电动机调速系统中的广泛应用,使得交流伺服系统的实现方式也由模拟、模数混合方式向全数字方式发展。
全数字控制方式不仅使系统具有功能多样化、高精度、高可靠性、智能化、网络化等特征,还为新型控制理论和方法的应用提供了平台[l-3]。
其中,永磁同步电机伺服系统已成为交流伺服系统的主导。
控制器方面,数字信号处理器以其高速数字信号处理特性,实现了先进复杂的控制算法,使交流伺服系统的控制性能得到进一步提高[4]。
本文分析了交流伺服控制器中闭环控制各部分实时性要求,根据ZYNQ SoC特点,利用其丰富灵活的资源配置,将电流控制算法、位置控制算法、速度控制算法,实时人机交互集成于ZYNQSoC中。
系统集成化程度得到全面的提升,配置更加灵活,可以实现不同设备间的互联。
系统设备数量成倍降低,并且可以实现分布式管理。
上位机不用负担计算任务,硬件成本进一步降低。
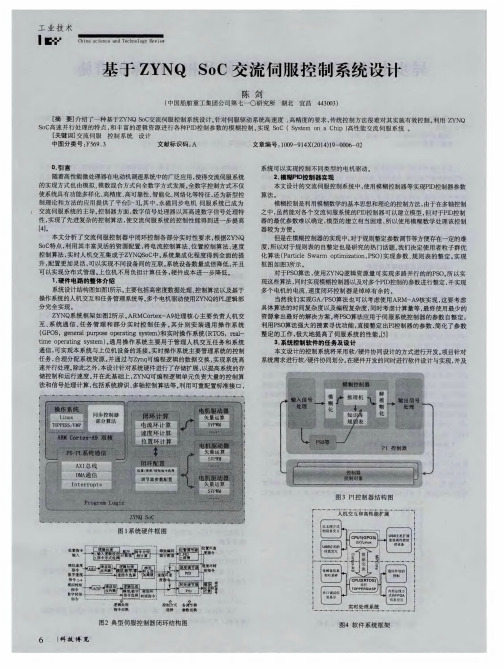
1.硬件电路的整体介绍系统设计结构图如图1所示。
主要包括高密度数据处理、控制算法以及基于操作系统的人机交互和任务管理系统等。
多个电机驱动使用ZYNQ的PL逻辑部分完全实现。
ZYNQ系统框架如图2所示。
ARMCortex-A9处理核心主要负责人机交互、系统通信、任务管理和部分实时控制任务。
其分别安装通用操作系统(GPOS, general purpose operating system)和实时操作系统(RTOS, real-time operating system)。
基于ZYNQSoC的多轴运动控制系统
OpenHW12项目申请基于ZYNQ SoC的多轴运动控制系统安富利特别题目基于Zynq平台的伺服控制或运动控制系统项目成员:顾强牛盼情孙佳将马浩华中科技大学二〇一二年十一月目录1项目概述 (1)1.1工业应用 (1)1.2系统方案 (3)2工作原理介绍 (6)3项目系统框架图 (8)3.1ZYNQ硬件系统框架图 (8)3.2软件系统框架图 (9)3.3多轴控制器实现 (10)4项目设计预计效果 (11)5附录一:项目技术基础 (13)5.1软硬件协同设计架构 (13)5.2软件设计 (14)5.3总结 (16)6附录二:ZYNQ基础 (16)1项目概述1.1 工业应用运动控制系统广泛应用于工业自动化领域,包括机器人手臂、装配生产线、起重设备、数控加工机床等等。
并且随着高性能永磁材料的发展、电力电子技术的发展以及大规模集成电路和计算机技术的发展使得永磁同步电机(PMSM,Permanent Magnet Synchronous Motor)控制系统的设计开发难度降低、成本降低,同时PMSM在运动控制系统中作为执行器件的应用也越来越广泛。
大量运动控制器的设计与实现都是基于通用嵌入式处理器。
在此基础上,很多学者和研究人员对运动控制系统进行了大量的研究。
多轴控制的发展是为了满足工业机器人、工业传动等应用需求。
其主要包括两大方面,多轴串联控制和多轴同步控制。
当系统负载较大、传动精度要求很高、运行环境比较复杂的情况下,经常使用多轴串联的方式来解决,如图1.1所示。
(1)双电机齿条传动(2)NASA 70-m天线设备图1.1 多轴串联控制系统应用多轴串联控制器可以实现包括多轴力矩动态分配、传动补偿校正、多轴位置/速度同步等功能。
其主要应用场合包括立式车床回转台、复合车床对向主轴、龙门起重设备。
当前,主要驱动设备厂商都推出有支持多轴串联功能的产品。
例如Rockwell 1336 IMPACT AC Drive,其采用主从控制方案实现多轴串联功能。
基于ZYNQSoC的多轴运动控制系统方案
OpenHW12项目申请基于ZYNQ SoC的多轴运动控制系统安富利特别题目基于Zynq平台的伺服控制或运动控制系统项目成员:华中科技大学二〇一二年十一月目录1项目概述 (1)1.1工业应用 (1)1.2系统方案 (3)2工作原理介绍 (6)3项目系统框架图 (8)3.1ZYNQ硬件系统框架图 (8)3.2软件系统框架图 (9)3.3多轴控制器实现 (10)4项目设计预计效果 (11)5附录一:项目技术基础 (13)5.1软硬件协同设计架构 (13)5.2软件设计 (14)5.3总结 (16)6附录二:ZYNQ基础 (16)1项目概述1.1工业应用运动控制系统广泛应用于工业自动化领域,包括机器人手臂、装配生产线、起重设备、数控加工机床等等。
并且随着高性能永磁材料的发展、电力电子技术的发展以及大规模集成电路和计算机技术的发展使得永磁同步电机(PMSM,Permanent Magnet Synchronous Motor)控制系统的设计开发难度降低、成本降低,同时PMSM在运动控制系统中作为执行器件的应用也越来越广泛。
大量运动控制器的设计与实现都是基于通用嵌入式处理器。
在此基础上,很多学者和研究人员对运动控制系统进行了大量的研究。
多轴控制的发展是为了满足工业机器人、工业传动等应用需求。
其主要包括两大方面,多轴串联控制和多轴同步控制。
当系统负载较大、传动精度要求很高、运行环境比较复杂的情况下,经常使用多轴串联的方式来解决,如图1.1所示。
(1)双电机齿条传动(2)NASA 70-m天线设备图1.1 多轴串联控制系统应用多轴串联控制器可以实现包括多轴力矩动态分配、传动补偿校正、多轴位置/速度同步等功能。
其主要应用场合包括立式车床回转台、复合车床对向主轴、龙门起重设备。
当前,主要驱动设备厂商都推出有支持多轴串联功能的产品。
例如Rockwell 1336 IMPACT AC Drive,其采用主从控制方案实现多轴串联功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OpenHW12项目申请基于ZYNQ SoC的多轴运动控制系统安富利特别题目基于Zynq平台的伺服控制或运动控制系统项目成员:华中科技大学二〇一二年十一月目录1项目概述 (1)1.1工业应用 (1)1.2系统方案 (3)2工作原理介绍 (6)3项目系统框架图 (8)3.1ZYNQ硬件系统框架图 (8)3.2软件系统框架图 (9)3.3多轴控制器实现 (10)4项目设计预计效果 (11)5附录一:项目技术基础 (13)5.1软硬件协同设计架构 (13)5.2软件设计 (14)5.3总结 (16)6附录二:ZYNQ基础 (16)1项目概述1.1工业应用运动控制系统广泛应用于工业自动化领域,包括机器人手臂、装配生产线、起重设备、数控加工机床等等。
并且随着高性能永磁材料的发展、电力电子技术的发展以及大规模集成电路和计算机技术的发展使得永磁同步电机(PMSM,Permanent Magnet Synchronous Motor)控制系统的设计开发难度降低、成本降低,同时PMSM在运动控制系统中作为执行器件的应用也越来越广泛。
大量运动控制器的设计与实现都是基于通用嵌入式处理器。
在此基础上,很多学者和研究人员对运动控制系统进行了大量的研究。
多轴控制的发展是为了满足工业机器人、工业传动等应用需求。
其主要包括两大方面,多轴串联控制和多轴同步控制。
当系统负载较大、传动精度要求很高、运行环境比较复杂的情况下,经常使用多轴串联的方式来解决,如图1.1所示。
(1)双电机齿条传动(2)NASA 70-m天线设备图1.1 多轴串联控制系统应用多轴串联控制器可以实现包括多轴力矩动态分配、传动补偿校正、多轴位置/速度同步等功能。
其主要应用场合包括立式车床回转台、复合车床对向主轴、龙门起重设备。
当前,主要驱动设备厂商都推出有支持多轴串联功能的产品。
例如Rockwell 1336 IMPACT AC Drive,其采用主从控制方案实现多轴串联功能。
SIEMENS SINUMERIK 840D则采用交叉耦合控制(CCC, cross couple control)方案。
FANUC、ABB、Mitsubishi electric都有类似功能的驱动产品。
国外也有众多学者进行了大量的研究。
在20世纪70年代,主从控制方案由于系统结构简单、调试方便被广泛用于这类应用中。
然而,主从控制方案未能充分发挥各单轴驱动的性能,系统带宽与响应速度十分有限。
受限于当时单轴驱动与主从控制器的性能,当系统运行在环境复杂,转速、转矩响应要求较高的场合,主从控制方案难以满足应用需求。
如何充分利用单轴运行状态,建立多轴间状态关系?如何设计控制器,对整个系统进行控制补偿,实现多轴之间的协调同步。
针对上述问题,Y. Koren于1980年提出了交叉耦合控制方案,并逐步应用于多轴串联控制系统中。
随着电机驱动技术和嵌入式技术的不断发展,交叉耦合控制方案得到了不断的完善。
多位学者针对不同应用对交叉耦合控制方案进行了深入的分析,并设计控制算法对各个轴的位置、速度、转矩信号进行补偿和协调。
所设计的交叉耦合控制器已在不同的数字处理器平台中得到实现,取得了良好的控制效果。
随着数控技术等的发展,高精度的多轴同步控制系统的发展也越来越快,需求也在逐渐增大。
例如在多轴加工机床、多轴雕刻机、贴片机手臂等系统上的应用。
在这些工业应用中,对多台电机运动控制协调的精度需求也不断增加。
上述的应用和研究方案,大多采用多个驱动单元分布式安装控制,通过工业以太网或者现场总线通信。
串联协同和同步控制的计算处理主要在上位机中完成。
这种方案灵活可靠,应用广泛,特别适合于大型分布式系统,如自动化生产线、重型机床。
然而,当以下情况发生时,上述方案的局限性就会突显出来。
(1)设备集成度较高,对驱动电路的体积有一定限制;(2)系统需采用不同通信接口的驱动设备,难以购买成套设备;(3)当设备数量和设备间通信的信息量增加时,将对系统通信模块的设计带来巨大挑战。
(4)上位机负担了大量的计算、通信和实时人机交互任务。
上位机的成本会随着系统的复杂程度不断提高。
本方案针对上述问题,依托ZYNQ SoC丰富灵活的资源配置,将单电机驱动控制算法、多轴控制算法、实时人机交互集成于ZYNQ SoC 中。
系统集成化程度得到全面的提升,配置更加灵活,可以实现不同设备间的互联。
系统设备数量成倍降低,并且可以实现分布式管理。
上位机不用负担计算任务,硬件成本进一步降低。
1.2系统方案传统数字处理器实现多轴串联控制器的方案存在诸多限制。
交叉耦合控制器设计难度大,实现困难。
为了实现各个电机驱动间的连接,使得系统可以运用于不同的场合,系统需要匹配不同的电机驱动接口。
为了实现转矩的动态分配和传动补偿,需要实时观测各个电机的工作情况。
由于多轴同步控制器参数整定比较复杂,需要控制器拥有较强的处理计算能力,甚至可以支持在线动态参数整定。
上述这些功能的实现,需要复杂的硬件设计、强大的实时计算能力、昂贵的系统配置和较高的系统功耗。
针对上述需求,如何通过改进系统结构,采用高效的开发方法和工具实现多轴串联控制系统,具有重要的应用价值和学术研究价值。
本设计通过齿轮传动,将多台PMSM电机装配在一起,为系统提供更大的力矩输出和更高的带宽。
我们通过设计多轴串联控制系统,将不同的电机驱动连接起来,控制各个驱动器保持实时协调同步。
并且,该系统还将包括多轴串联控制器辅助调试和可视化人机交互接口等一系列功能。
我们将双轴PMSM电机共同连接在一个较大的齿轮盘上,并在齿轮中央同轴安装一台PMSM电机。
实现大齿轮盘与中间同轴电机的旋转同步。
系统实现3D效果图如下图1.3所示。
本设计拟将多轴控制系统从底层驱动至上位机人机交互等一整套完整的功能,通过分层实现的方法逐一实现PMSM驱动、驱动级协同、基于操作系统的人机交互等层次设计。
在进一步提高系统效率和通用性、降低硬件成本的基础上,保证系统的完整性,为用户调试和使用提供方便。
图 1.3 系统整体测试台效果图ZED开发系统采用Xilinx Zynq-7000系列处理器。
Zynq-7000系列处理器基于Xilinx可扩展处理平台。
单片处理器拥有双核ARM Cortex- A9处理系统和28nm Xilinx 7系列可编程逻辑单元。
其可编程逻辑单元通过动态可重配置可以实现不同电机驱动接口的连接。
高速片总线实现信息在Zynq-7000处理单元间的无缝传递。
丰富的外部设备接口保证Zynq-7000处理器对系统状态的实时观测。
Zynq-7000处理器强大的处理能力、丰富的计算手段可以实现多轴串联控制器参数的在线整定。
在此基础上,双核ARM Cortex-A9处理系统可以实现系统任务实时管理与人机交互。
相比数字信号处理器(DSP, digital signal processor)和工控机(IPC,industry personal computer),基于可编程逻辑单元的控制器可以发挥其并行处理的优势,在更短的时间实现复杂的控制算法。
这样,基于Xilinx Zynq-7000系列处理器的ZED开发系统可以实现一整套多轴同步控制系统。
从底层的多轴串联控制算法,到系统上层的人机交互与基于模型的计算机辅助调试功能,都可以在一块芯片中完成。
因此,整个系统的低功耗和电路的可复用性也可以实现。
同时,上述方案与ASIC (application-specific integrated circuit)相比,该方案通用性优势明显,且系统成本大幅度降低。
所以,采用ZED开发系统设计多轴同步控制系统,不仅对多轴控制系统的发展、推广有重要的工程应用价值。
同时,将有助于多轴控制系统的理论分析与工程设计相结合,具有学术研究价值。
与此同时,本项目将采用嵌入式软/硬件协同设计的方式进行开发,借助ZED开发系统的技术支撑,力求在开发效率、开发成本和系统性能等方面得到全面的优化。
2工作原理介绍图2.1 系统工作原理图借助于ZED开发板强大的性能和完善的设计软件,可以实现快速、高效的系统开发。
系统工作原理如图2.1所示。
前期系统模型和分析利用Matlab完成。
通过Matlab与Xilinx产品的相互支持,设计者可以快速确定控制器方案和具体实施细节,包括多轴串联控制器、多轴同步控制器、状态观测器等。
控制信号通过标准接口传递给各个电机驱动,控制各轴的运动。
各轴的实时状态也通过接口反馈到上位机,并可以传递给Matlab进行数据分析和参数调试。
针对多轴串联控制器,本设计采用交叉耦合结构,在线监测各轴工作状态,以此自适应调整各个单轴控制器和多轴控制器。
多轴串联控制器对各个单轴驱动器进行实时补偿。
并实现同步控制器协同中央电机和两个大齿轮驱动电机的协同旋转。
详细系统框图如图2.2所示。
图2.2 多轴控制系统框图3项目系统框架图3.1ZYNQ硬件系统框架图图 3.1 系统顶层设计系统设计结构图如图 3.1 所示。
主要包括高密度数据处理、控制算法以及基于操作系统的人机交互和任务管理系统等。
多个电机驱动使用ZYNQ的PL逻辑部分完全实现。
ZYNQ系统框架如图3.2所示。
ARM Cortex-A9处理核心主要负责人机交互、系统通信、任务管理和部分实时控制任务。
其分别安装通用操作系统(GPOS, general purpose operating system)和实时操作系统(RTOS, real-time operating system)。
通用操作系统主要用于管理人机交互任务和系统通信,可实现本系统与上位机设备的连接。
实时操作系统主要管理系统的控制任务,合理分配系统资源。
并通过与Zynq可编程逻辑的数据交换,实现系统高速并行处理。
除此之外,本设计针对系统硬件进行了存储扩展,以提高系统的存储控制和运行速度。
并在此基础上,ZYNQ可编程逻辑单元负责大量的控制算法和信号处理计算,包括系统辨识、多轴控制算法等。
利用可重配置标准接口,系统可以实现控制不同类型的电机驱动。
图3.2 硬件系统框架图3.2软件系统框架图本项目将采用软/硬件协同设计的方式进行开发。
项目针对系统需求进行软/硬件协同划分。
在硬件开发的同时进行软件设计与实现,并及时进行协同和调整。
详细软件系统框架如图3.3所示。
Cortex-A9 CPU1搭载Linux操作系统,主要负责信息交互与高性能处理设备扩展。
Cortex-A9 CPU2搭载TOPPERS/ASP实时操作系统,负责传感器信息采集、通用外设调度以及与ZYNQ SoC可编程逻辑单元的信息交互。
图3.3 软件系统框架3.3多轴控制器实现控制器实现对多个电机闭环控制系统的协同,使用模糊控制器等实现多电机同步算法。
模糊控制是利用模糊数学的基本思想和理论的控制方法,由于在多轴控制之中,虽然能对各个电机建立模型,但对于多个电机之间存在耦合关系之后,模型的建立相当困难,并且控制器要求的输入变量较多,所以使用模糊数学处理该控制器较为方便。