斜齿轮动力学建模中啮合刚度处理与对比验证
齿轮啮合刚度及齿轮动力学
THANKS
谢谢您的观看
。
边界元法具有较高的计算精度和效率, 适用于求解复杂几何形状和多种材料组
成的齿轮系统的动态响应问题。
有限差分法
在齿轮动力学分析中,有限差分法可以用于模拟齿轮 系统的动态响应和振动问题。
单击此处添加正文,文字是您思想的提一一二三四五 六七八九一二三四五六七八九一二三四五六七八九文 ,单击此处添加正文,文字是您思想的提炼,为了最 终呈现发布的良好效果单击此4*25}
03
齿轮动力学模型
一维模型
描述
一维模型假设齿轮在接触线上的变形是唯一的变形形式,忽略了 齿面摩擦和齿根弯曲变形的影响。
优点
计算简单,适用于初步设计和分析。
缺点
与实际情况存在较大误差,不能准确反映齿轮动态性能。
二维模型
描述
二维模型考虑了齿面摩擦和齿根 弯曲变形的影响,但仍忽略了齿 面接触变形和齿轮体内部振动。
优化设计的方法
1 2
数学建模
建立设计问题的数学模型,包括目标函数和约束 条件。
数值计算
利用数值计算方法求解数学模型,得到最优解。
3
计算机辅助设计
利用计算机辅助设计软件进行优化设计,提高设 计效率。
齿轮动力学优化设计实例
实例一
01
行星齿轮传动系统的优化设计,提高系统的承载能力和效率。
实例二
02
斜齿轮传动系统的优化设计,减小振动和噪音。
外部激励
如电机、传动轴等外部激 励因素,也可能引起齿轮 振动。
齿轮动力学在工程中的应用
故障诊断
通过分析齿轮振动的频率 、幅值等信息,判断齿轮 的故障类型和位置。
优化设计
利用齿轮动力学理论,优 化齿轮设计,提高齿轮的 动态性能和承载能力。
斜齿轮时变啮合刚度改进算法及影响因素分析
斜齿轮时变啮合刚度改进算法及影响因素分析
吴鲁纪;杨世豪;冯伟;杨林杰
【期刊名称】《机械强度》
【年(卷),期】2024(46)2
【摘要】在势能法基础上,基于切片积分原理,考虑齿根过渡曲线方程,提出一种改进的斜齿时变啮合刚度计算方法。
该方法考虑了真实齿根过渡曲线参数方程,修正了渐开线齿廓的积分区间,与有限元方法的对比结果验证了算法的有效性,减小了时变啮合刚度的计算误差。
在此方法基础上,分析了齿宽、螺旋角、齿数和模数对时变啮合刚度的影响。
结果表明,时变啮合刚度均值受齿宽影响较大,近似成线性关系;受螺旋角、齿数影响较小;螺旋角增大,均值以较小幅度波动性变化;中心距一定时,齿数增大,时变啮合刚度缓慢增大;齿轮参数改变会影响重合度;轴向重合度为整数时,时变啮合刚度波动值较小。
【总页数】8页(P312-319)
【作者】吴鲁纪;杨世豪;冯伟;杨林杰
【作者单位】郑州机械研究所有限公司;同济大学机械与能源工程学院;河南工业大学机电工程学院
【正文语种】中文
【中图分类】TH132.4
【相关文献】
1.斜齿轮时变啮合刚度算法修正及影响因素研究
2.裂纹故障对斜齿轮时变啮合刚度及振动响应的影响分析
3.考虑温度效应的斜齿轮时变啮合刚度解析算法
4.考虑时变摩擦的直齿轮副啮合刚度计算及其影响因素分析
5.斜齿轮啮合刚度改进算法及其影响因素分析
因版权原因,仅展示原文概要,查看原文内容请购买。
斜齿轮的齿面载荷及啮合刚度数值分析

30机械工艺师2000.10—————————————————————————————————————————————————————————————————————————————————一~斜齿轮的齿面载荷及啮合刚度数值分析口林腾蛟李润方朱才朝杭华江擅要基于齿格啮合原理和接触问是有艰元法。
提出了一种白赫生成任意咕台位王有限元模型的算法,开发了啮合轮齿自动建模程序度接齄有限元分析程序,井对井啬轮进行分析计算,得到了培定啮夸住王齿面截荷分布曲线和运转过程啮合剐度的变化曲线。
关■词:辩齿轮自动t其接■问量有厦元法为了研究斜齿轮接触压力沿齿面分布情况,计算齿面啮台刚度,本文提出了一种自动生成齿面任意啮合位置接触有限元计算模型的方法,编制了相应的轮齿自动建模程序。
应用接触有限元混合计算公式,编制了轮齿接触有限元分析程序。
本文开发的程序巳用于多个工程实际项目的分析,计算结果可靠.对指导齿轮设计有较大的实际意义。
一、轮齿接继有限元自动建模1.轮齿阿格生成方法首先建立如图1所示的整体坐标系YOZ和旋转坐标系y10。
五,主动轮和被动轮的轴心分别通过原点0,和0。
YOZ坐标系中所示的轮齿为生成前端面网格的原始位置。
以大、小齿轮第一对齿在前蛸面节点啮合位置作为转角初始位置。
相对莱一转角位置各对齿的网格生成方法如下:1)确定轮齿接触线位置,计算前靖面的啮合点坐标。
以该点为分界点。
将主、被动轮齿顶部分网格均分,而齿根部分的嘲格由与其啮合的齿顶阿格决定。
2)根据齿根过渡曲线方程及轮体尺寸要求,计算前端齿根过渡部位及轮体部位离散点坐标.并生成阿格节点。
3)齿长方向各截面网格由前端面网格沿基圆柱旋转延伸生成。
2.轮齿的边界条件处理将被动轮轮体作为固定约束,主动轮轮体径向按斜约束处理,切向施加均布载荷,如图2所示。
载荷大小为:口=正,(‘U)…………………………………(1)式中羁——主动轮转矩‘——舶载面曲率半径‘——加赣面圆弧长度6——齿宽3.轮齿自动建模程序设计I鞋齿接■■垒标计算I-l计算齿膏^鼓点生标』晤甄而面商函葡而i鼐,、—————————jE——..。
考虑温度效应的斜齿轮时变啮合刚度解析算法
考虑温度效应的斜齿轮时变啮合刚度解析算法1. 引言1.1 背景介绍随着机械传动系统工作环境要求的不断提高,传统的静态啮合刚度模型已经不能满足工程实践的需求。
研究考虑温度效应的斜齿轮时变啮合刚度成为了当前研究的热点之一。
温度的变化会导致斜齿轮材料的热膨胀,进而影响啮合面的形状和位置,从而改变啮合刚度。
准确地建立考虑温度效应的时变啮合刚度模型对于提高斜齿轮传动系统的设计和性能具有重要意义。
本文旨在探讨温度效应对斜齿轮时变啮合刚度的影响,并提出一种算法来分析和验证温度效应下斜齿轮系统的动态特性。
通过深入研究,可以全面了解温度效应对斜齿轮系统性能的影响机制,为斜齿轮传动系统的设计和优化提供理论支持。
1.2 研究意义斜齿轮传动系统作为一种常见的传动装置,在工业生产中起着至关重要的作用。
研究斜齿轮时变啮合刚度的算法以及考虑温度效应的影响,不仅可以深入了解斜齿轮传动系统的工作原理和性能特点,也有助于改善斜齿轮传动系统的性能和稳定性。
斜齿轮传动系统在实际工作中常受到温度的影响,温度的变化会导致斜齿轮的尺寸和材料性质发生变化,进而影响斜齿轮的啮合刚度。
因此,研究斜齿轮系统在不同温度下的啮合刚度变化规律,对于提高斜齿轮传动系统的工作效率和减少系统故障具有重要意义。
通过深入研究温度效应对斜齿轮系统时变啮合刚度的影响,可以为工程技术人员提供有效的设计和优化方法,使斜齿轮传动系统在不同工作温度下都能够保持良好的性能和稳定性。
因此,探究考虑温度效应的斜齿轮时变啮合刚度解析算法具有重要的研究意义和实际应用价值。
1.3 研究目的研究目的:本文旨在通过考虑温度效应,建立斜齿轮时变啮合刚度解析算法,深入探究温度对啮合刚度的影响机理,并验证所提出算法的准确性和有效性。
具体目的包括:1. 分析温度效应对斜齿轮啮合刚度的影响:通过分析温度变化导致的材料性质变化、几何形状变化等因素,探讨温度效应对斜齿轮啮合刚度的具体影响机理。
2. 建立基于温度效应的时变啮合刚度模型:结合温度变化情况,建立时变啮合刚度模型,考虑温度对齿面接触强度、啮合体积弹性模量等参数的影响,为斜齿轮系统动力学分析提供有力支持。
考虑温度效应的斜齿轮时变啮合刚度解析算法
考虑温度效应的斜齿轮时变啮合刚度解析算法
斜齿轮是一种常用的传动装置,其啮合刚度是描述其刚度性能的重要指标。
在实际应用中,温度对斜齿轮的性能会产生一定的影响。
为了更准确地预测斜齿轮传动系统的动力学性能,需要考虑温度效应对斜齿轮的啮合刚度的影响。
温度效应导致斜齿轮材料的热胀冷缩,从而引起齿面形状和尺寸的变化,进而影响斜齿轮的啮合性能。
为了解析考虑温度效应的斜齿轮时变啮合刚度,可以采用以下算法:
第一步,确定斜齿轮的初始几何参数。
这些参数包括齿数、分度圆直径、齿顶高度、齿根高度等。
还需要确定斜齿轮的材料参数,如弹性模量、热膨胀系数等。
第二步,根据斜齿轮的初始几何参数和材料参数,计算出初始的齿面接触变形。
这可以通过有限元分析或基于解析方法的计算得到。
在计算过程中,考虑斜齿轮材料的温度分布,并结合材料的热膨胀系数,将温度效应考虑在内。
第三步,根据斜齿轮的几何参数和接触变形,计算出初始的啮合刚度。
啮合刚度可以通过求解几何刚度和接触刚度之和得到。
几何刚度可以通过解析方法计算得到,而接触刚度可以通过Hertz接触理论计算得到。
第四步,考虑温度效应对几何参数和接触变形的影响。
由于温度会引起齿面形状和尺寸的变化,因此需要根据温度分布和热膨胀系数计算出新的几何参数和接触变形。
第六步,比较新旧啮合刚度的差异,并将其作为修正系数。
根据修正系数和预先设定的时间步长,可以得到温度对啮合刚度的时变影响。
通过上述算法,可以考虑温度效应的斜齿轮时变啮合刚度。
该算法可以提高对斜齿轮传动系统动力学性能的预测准确性,为工程设计和优化提供有力支持。
考虑温度效应的斜齿轮时变啮合刚度解析算法

考虑温度效应的斜齿轮时变啮合刚度解析算法斜齿轮机械是一种常见的传动装置,在实际工作中经常会受到温度的影响。
温度变化会引起材料的膨胀和收缩,从而影响斜齿轮的啮合刚度。
为了准确地预测和分析斜齿轮的工作性能,在考虑温度效应的情况下,需要开发一种解析算法。
本文将介绍一种考虑温度效应的斜齿轮时变啮合刚度解析算法。
需要了解斜齿轮的啮合刚度是如何受温度影响的。
斜齿轮的啮合刚度取决于材料的弹性模量和几何参数。
当温度升高时,材料的弹性模量会减小,从而导致啮合刚度的降低。
由于温度的非均匀分布,斜齿轮各部分的温度差异也会引起啮合刚度的变化。
在进行温度效应的时变啮合刚度解析算法时,可以采用有限元法进行建模和求解。
需要确定斜齿轮的几何参数,例如齿数、模数、齿轮厚度等。
然后,根据斜齿轮的材料性质,选择合适的材料模型进行建模。
在考虑温度效应时,需要将材料的弹性模量与温度相关联,通常使用材料的热膨胀系数和参考温度,通过线性或非线性关系表示弹性模量随温度变化的规律。
接下来,需要建立斜齿轮的有限元模型并进行离散化。
通常采用三维模型和六节点六自由度单元进行建模,其中包括6个位移和6个转角自由度。
根据斜齿轮的几何参数,将齿轮的结点和单元进行合理划分,并设置边界条件和加载条件。
在考虑温度效应时,需要在模型中引入温度场,并与材料的热膨胀系数相耦合。
然后,进行时变啮合刚度的求解。
根据斜齿轮的有限元模型,可以利用常见的有限元软件进行求解,如ANSYS、ABAQUS等。
通过施加加载条件,计算出斜齿轮在不同温度下的应力和位移分布。
然后,根据弹性力学理论,计算得到斜齿轮的啮合刚度。
进行结果分析和评估。
根据求解得到的时变啮合刚度,可以对斜齿轮的工作性能进行评估。
可以通过对不同工况和温度变化的分析,优化斜齿轮的设计和工作参数,提高其可靠性和效率。
考虑温度效应的斜齿轮时变啮合刚度解析算法是一种重要的分析方法,可以帮助工程师和设计人员准确地预测和分析斜齿轮的工作性能。
斜齿轮啮合刚度改进算法及其影响因素分析

2023年 第47卷 第3期Journal of Mechanical Transmission 斜齿轮啮合刚度改进算法及其影响因素分析刘子谦 孙宇 周朝东 姜艳军 冯楠 赵林燕(重庆青山工业有限责任公司, 重庆 402761)摘要 在势能法的基础上,提出了一种斜齿轮啮合刚度修正算法。
该方法考虑了齿轮真实加工时产生的齿根过渡曲线,齿根过渡曲线是刀具展成运动时齿顶尖角所形成的轨迹线,且齿根过渡曲线与渐开线的交点为渐开线的起始点。
在刚度计算时,齿根到渐开线起始点用齿根过渡曲线方程来计算,渐开线起始点到齿顶用渐开线方程来计算,运用该方法计算的啮合刚度与实际更加接近。
通过与有限元法的对比,验证了该修正算法的准确性,提升了斜齿轮啮合刚度的计算精度。
基于该方法,分析了渐开线形状、啮合位置以及重合度对斜齿轮啮合刚度以及传递误差的影响。
结果表明,当压力角增大时,渐开线曲率半径会变大,从而提高了齿轮的端面刚度;同时,端面重合度会先增大后减小,在端面刚度与端面重合度的综合影响下,平均啮合刚度与端面重合度变化趋势相同;当啮合位置更靠近节点时,啮合刚度会提高;增加重合度会使平均刚度增加,并使传递误差峰峰值趋势整体下降;但当重合度接近0.5的奇数倍时,传递误差峰峰值会出现极大值。
关键词 齿根过渡曲线 势能法 斜齿轮 啮合刚度 重合度Study on an Improved Algorithm for Helical Gear Meshing Stiffnessand Its Influencing FactorsLiu Ziqian Sun Yu Zhou Chaodong Jiang Yanjun Feng Nan Zhao Linyan(Chongqing Tsingshan Industry Co., Ltd., Chongqing 402761, China)Abstract Based on the potential energy method, an algorithm for modifying the meshing stiffness of heli⁃cal gears is proposed. This method considers the real machining of the tooth root transition curve, which is a tra⁃jectory line formed by the tip angle of the tooth when the tool rolls into motion, and the starting point of the invo⁃lute is the intersection of the tooth root transition curve and the involute. When calculating the stiffness, the tooth root transition curve equation from the root of the tooth to the starting point of the involute is used for the calculation, and the involute equation from the starting point of the involute to the top of the tooth is used in the calculation. The meshing stiffness calculated by this method is closer to the reality. Compared with the finite ele⁃ment method, the accuracy of the modified algorithm is verified and the calculation accuracy of the helical gear meshing stiffness is improved. Based on this method, the influence of involute shape, meshing position and con⁃tact ratio on the meshing stiffness and transmission error of helical gears is analyzed. The research results show that when the pressure angle increases, the radius of curvature of involute will increase. Thus the transverse stiff⁃ness of gears is improved. At the same time, the transverse contact ratio will firstly increase and then decrease. Under the influence of transverse stiffness and transverse contact ratio, the variation trend of average meshing stiffness is the same as that of transverse contact ratio; when the meshing position is closer to the node, the mesh⁃ing stiffness will increase; an increased total contact ratio will make the average stiffness increase, and the trans⁃mission error (TE) decrease as a whole. However, when the contact ratio is close to the odd multiple of 0.5, theTE peak-to-peak value will reach a maximum value.Key words Tooth root transition curve Potential energy method Helical gear Meshing stiffnessContact ratio文章编号:1004-2539(2023)03-0039-10DOI :10.16578/j.issn.1004.2539.2023.03.00639第47卷0 引言在齿轮系统动力学研究中,齿轮的刚度激励是造成齿轮传递误差的重要原因,而传递误差是齿轮系统振动噪声的重要激励源。
考虑温度效应的斜齿轮时变啮合刚度解析算法
考虑温度效应的斜齿轮时变啮合刚度解析算法斜齿轮是一种常见的机械传动装置,广泛应用于各个领域。
由于工作条件的变化以及传动元件的磨损等因素,斜齿轮的啮合刚度会发生变化,从而对传动系统的性能产生影响。
考虑温度效应的斜齿轮时变啮合刚度解析算法成为了研究的热点。
一、斜齿轮的温度效应斜齿轮在工作过程中会因为摩擦、能量损耗等因素产生热量,从而导致其温度升高。
而温度的变化会使得材料的力学性能发生变化,进而影响啮合刚度。
温度升高还会引起轴承的膨胀和弯曲等变形,从而进一步改变了传动系统的工作状态。
二、时变啮合刚度斜齿轮的啮合刚度是指在给定啮合力下啮合面的变形与啮合力之间的比例关系。
啮合刚度是反映传动系统刚度的重要参数,影响着传动系统的动态性能、运动精度以及噪声等。
考虑温度效应的时变啮合刚度是指随着时间和温度的变化,啮合刚度发生变化的情况。
三、解析算法的研究方法为了研究考虑温度效应的斜齿轮时变啮合刚度,可以采用解析算法进行分析。
解析算法是指通过建立数学模型和方程,推导出精确解或近似解的方法。
针对斜齿轮的温度变化和啮合刚度变化规律,可以建立相应的数学模型,并运用解析算法进行求解。
四、建立数学模型为了建立考虑温度效应的斜齿轮时变啮合刚度解析算法,需要考虑以下几个方面的因素:1. 斜齿轮材料的热传导特性:考虑斜齿轮的热传导特性,建立热传导方程,描述温度在轮齿中的传输和分布规律。
2. 斜齿轮材料的力学性能:考虑斜齿轮材料的温度变化对力学性能的影响,建立相应的力学模型,描述材料的弹性模量、热膨胀系数等参数随温度变化的规律。
3. 啮合面的变形分析:考虑温度变化对轮齿啮合面的变形影响,建立啮合面变形的数学模型,描述啮合面的压力分布和变形情况。
1. 解析解法:根据建立的数学模型,通过推导方程,求得精确的解析解。
这种方法的优点是精确度高,能够得到精确的结果。
但缺点是复杂度较高,需要进行复杂的数学推导。
五、实验验证与仿真模拟为了验证考虑温度效应的斜齿轮时变啮合刚度解析算法的准确性和可靠性,可以进行实验验证和仿真模拟。
一种确定斜齿轮传递误差和啮合刚度的快速有效方法

一种确定斜齿轮传递误差和啮合刚度的快速有效方法常乐浩;贺朝霞;刘岚;刘清涛【摘要】An efficient method for predicting the transmission error and mesh stiffness of helical gears was presented based on the thin slice theory proposed by Smith.A helical gear was divided into a series of independent thin spur gears along the tooth width.The bending-shearing deformation and local contact deformation of each single slice and the gear body deformation were taken into account in this model.Meanwhile,a loaded contact model was built through the deformation compatibility between different slices.Then,the load distribution on tooth surface,transmission error and mesh stiffness were calculated.The time varying single tooth stiffness,the nonlinear effect of loaded contact deformation and gear body e ffects were additionally considered,comparing with the Smith’ s thin slice method,which increases the accuracy and applicability.The higher computational efficiency of the proposed method than the finite element method with the same accuracy makes it more suitable for fast prediction of the vibrations and noises of gear systems.%基于Smith切片法理论,提出了一种快速计算斜齿轮副传递误差和啮合刚度的改进方法.该模型将斜齿轮沿齿宽方向划分为一系列相互独立的薄直齿轮,考虑单个切片的弯曲-剪切变形、局部接触变形及轮体结构变形,通过各切片间的变形协调关系建立斜齿轮非线性承载接触模型,进而得到齿面载荷分布、传递误差和啮合刚度等信息.该方法较Smith切片法增加了时变单齿刚度、接触变形非线性效应以及轮体结构参数的影响,提高了模型的计算精度和适用性.该模型的计算精度与有限元方法相当,但具有更高的计算效率,更适合于齿轮传动系统振动和噪声的快速预测.【期刊名称】《振动与冲击》【年(卷),期】2017(036)006【总页数】7页(P157-162,174)【关键词】斜齿轮;传递误差;啮合刚度;切片法【作者】常乐浩;贺朝霞;刘岚;刘清涛【作者单位】长安大学道路施工技术与装备教育部重点实验室,西安710064;长安大学道路施工技术与装备教育部重点实验室,西安710064;西北工业大学陕西省机电传动与控制工程实验室,西安710072;长安大学道路施工技术与装备教育部重点实验室,西安710064【正文语种】中文【中图分类】TH113齿轮副传递误差和啮合刚度都是引起齿轮装置振动主要的激励因素,是进行齿轮系统振动分析首要开展的研究工作。
一种确定斜齿轮传递误差和啮合刚度的快速有效方法_常乐浩
动
与
冲
击 Vol. 36 No. 6 2017
JOURNAL OF VIBRATION AND SHOCK
一种确定斜齿轮传递误差和啮合刚度的快速有效方法
1 1 常乐浩 , 贺朝霞 , 刘 2 1 岚, 刘清涛
图2 Fig. 2
啮合面切片划分与接触点布置
( 3 ) 由于齿面微观接触变形与所受载荷呈非线性 关系, 导致啮合刚度实际上随啮合力呈非线性变化, 而 Smith 方法无法考虑此种效应。
Thin slices and contact points on plane of action
第6 期
常乐浩等: 一种确定斜齿轮传递误差和啮合刚度的快速有效方法 表1 Tab. 1 Ai L M -5. 574 ×10 - 5 60. 111 ×10 - 5 -50. 952 ×10 - 5 -6. 204 ×10 - 5 式( 4 ) 中各系数值
n n
P = ks ∑ ui = ks ∑ ( δ - εi )
i =1 i =1
( 1)
k s 为各接触点刚度, SMITH 认 式中, 即单个切片刚度, 为各切片刚度相同, 由 ISO 6336 中的单齿刚度公式得 出; ε i 为接触点 i 处的初始间隙量, 即误差或修形量; u i 为各接触点的变形, 且满足当 δ > ε i 时, 表明该点已接 u i 取正值, ui 取 0。 当 δ > ε i 时, 表明该点未接触, 触, SMITH 采用 迭 代 法 计 算 传 递 误 差 δ, 迭代步骤 如下: ( 1) 令 k = 1, 给定传递误差初值 δ ( 1) ; ( 2 ) 依次判断每个接触点 i 处变形 δ ( k) - ε i 的大 小, 若小于 0 , 令其等于 0 ; ( 3 ) 根据式( 1 ) 求得总载荷 P ( k) ; ^(ε ^ 为允许小量 ) 是否成 ( 4 ) 判断 ( P ( k) - P ) < ε k=k+ 立。若不成立, 令 δ ( k + 1 ) = δ ( k) - ( P ( k) - P ) / k s , 1, 返回第( 2 ) 步; 若成立, 则迭代中止, 输出 δ = δ ( k) ; n c 为实际接触 ( 5 ) 齿轮副啮合刚度为 K = n c k s , 点数。 1. 3 Smith 方法的优缺点 Smith 切片法最大的优点在 于 , 将斜齿轮的三维 问题简化为 二 维 问 题 处 理 , 大 大 简 化 了 计 算。 相 比 传统解析法 , 能够计入齿轮变形 、 齿面制造误差和修 形等参数 , 使计 算 的 传 递 误 差 中 包 含 变 形 和 误 差 两 类因素的影响 。 相比有限元法 , 虽然精度略低 , 但具 因此非常适合于传递误差的快 有更高的计算 效 率 , 速预测 。 Smith 切片法的缺点主要有: ( 1 ) 认为单个切片从齿顶到齿根的刚度为定值 , 即 ISO 标准中的单齿刚度。 但实际上单个轮齿在不同啮 合位置的刚度是变化的, 导致轮齿变形从齿顶到齿根 产生差异, 这种假设显然是不合适的; ( 2 ) 无法计入由齿轮轮体结构柔性引起的轮齿附 加变形, 限制了其适用范围。
齿轮啮合刚度及齿轮动力学研究

齿轮啮合刚度及齿轮动力学研究齿轮是一种传动元件,常用于将一个轴的旋转运动传递到另一个轴上。
在传动过程中,齿轮的啮合是非常关键的一环,因为它决定了传动的效率、精度和可靠性。
齿轮啮合的刚度和动力学性能是齿轮设计和制造的重要指标之一,本文将就这两个方面进行探讨。
一、齿轮啮合刚度齿轮啮合刚度是指当两个齿轮啮合时,齿位变化所需要的外力大小与齿位变化量之比。
刚度越大,就说明齿轮对外界干扰的敏感度越小,从而提高了传动的精度和可靠性。
齿轮啮合刚度的大小与齿轮的强度、刚度、形状和精度等有关。
在齿轮设计中,需要考虑啮合刚度对传动系统的影响。
一方面,对于高精度要求的应用场合,需要提高齿轮啮合刚度,以减小齿轮传动误差和振动,从而使传动精度更高;另一方面,过大的啮合刚度会增加传动系统的强度和刚度要求,同时对齿轮和轴承等组件造成更大的载荷和磨损,可能导致传动系统损坏。
因此,需要在设计中进行合理的权衡和选择。
为了提高齿轮啮合刚度,有多种方法可采用。
其中一种方法是增加齿数,增加啮合面积和接点数,从而提高传递扭矩的能力和刚度。
但是过多的齿数会增加制造难度和成本。
另一种方法是采用特殊的齿形设计,如渐开线、修形渐开线、顶隙小的波形齿等,从而提高啮合刚度和改善传动性能。
此外,也可以通过优化材料和热处理等工艺措施来提高齿轮的强度和刚度,从而增加传动系统的稳定性和可靠性。
二、齿轮动力学研究齿轮在传动过程中会产生振动和噪声,这对传动系统的工作性能、噪声水平和寿命等均有重要影响。
因此,对齿轮的动力学性能进行研究和优化非常重要。
齿轮动力学研究通常包括以下几个方面。
首先是齿轮的强度和刚度计算,在设计中确定齿轮和轴承等部件的尺寸和性能参数,以满足传动的要求。
其次是齿轮系统的振动分析和控制,对齿轮系统进行振动模态分析、自然频率计算和模态实验等,以确定振动的产生原因和控制措施。
还需要考虑齿轮啮合和齿面损伤的研究,了解齿轮在运行过程中的啮合位置、接触应力、齿面疲劳和龟裂等破坏形式,以制定必要的维护和保养措施。
修形斜齿轮啮合线振动加速度数值分析和试验验证
修形斜齿轮啮合线振动加速度数值分析和试验验证修形斜齿轮是一种特殊的齿轮传动形式,它广泛应用于重型机械设备中。
在传动过程中,齿轮的啮合产生了振动,这会对传动效率、噪声和寿命等方面产生不利影响。
因此,对修形斜齿轮啮合线振动加速度进行数值分析和试验验证是十分必要的。
首先进行数值分析。
利用有限元方法,建立修形斜齿轮的三维模型,并根据传动的要求,设定传动比和转速等参数。
通过分析齿轮的受力情况,计算出啮合线上的应力分布。
然后,利用ANSYS等软件对齿轮的振动特性进行模拟,得出修形斜齿轮啮合线振动加速度的数值结果。
接下来进行试验验证。
在实验中,采用模拟测试台架和高精度传感器等设备,对修形斜齿轮的振动加速度进行测试。
在测试过程中,根据前期的数值分析结果,调整测试的参数,如转速、传动比等,以得到更准确的数据。
通过对测试数据的分析,比对数值分析结果,可以评估数值模拟的准确性,进一步完善模拟算法。
最后,综合分析数值模拟和试验测试的结果,确定修形斜齿轮的振动特性,并提出优化建议。
例如,通过改变齿轮的材料、结构等优化齿轮的设计,减少齿轮的振动加速度,提高传动效率和使用寿命。
同时,对于齿轮的监测和维护也提出了有效的建议,以确保齿轮传动系统的长期稳定运行。
总之,对修形斜齿轮啮合线振动加速度进行数值分析和试验验证是非常必要的。
通过这些工作,可以有效评估齿轮传动的振动特性,提高设备的传动效率和寿命,同时为优化设计和维护提供有效的建议。
针对修形斜齿轮的啮合线振动加速度的数值分析和试验验证,需要收集相关数据并进行分析。
以下是一些常见的数据和分析方法:1. 齿轮的几何参数:包括模数、齿数、齿宽、齿面曲线等。
这些参数会影响到齿轮的受力情况和振动特性。
可以通过绘制齿轮的几何图形,计算出齿面曲率半径等参数,并进行优化设计。
2. 金属材料力学参数:包括弹性模量、泊松比、屈服强度等。
这些参数反映了齿轮材料的力学性质,直接影响到齿轮的受力情况和振动特性。
考虑温度效应的斜齿轮时变啮合刚度解析算法
考虑温度效应的斜齿轮时变啮合刚度解析算法斜齿轮是一种常用的齿轮传动机构,在工程实践中广泛应用于各种机械设备中。
在斜齿轮啮合过程中,温度变化会对齿轮的啮合刚度产生影响,从而影响整个传动系统的工作性能。
对于温度效应的斜齿轮时变啮合刚度进行研究和分析,对于提高传动系统的工作精度和可靠性具有重要意义。
一、斜齿轮啮合刚度的定义和影响因素斜齿轮啮合刚度是指在单位齿轮间隙下,传动系统在受到外界力的作用时产生的力与齿轮相对位移之比。
它是描述齿轮传动刚度的重要参数,用于表示齿轮传动系统对外界力的响应能力。
斜齿轮啮合刚度的大小会直接影响齿轮传动系统的动力学性能,包括传动精度、传动误差等。
温度变化会导致齿轮材料的热胀冷缩,进而影响齿轮的尺寸和材料力学性能,从而改变齿轮的啮合刚度。
二、斜齿轮啮合刚度分析模型斜齿轮啮合刚度的分析模型通常采用有限元方法进行建模和计算。
基于有限元法的分析模型主要包括两部分内容:齿轮材料力学模型和啮合接触模型。
1. 齿轮材料力学模型通过建立齿轮材料的力学模型,可以计算出温度变化引起的齿轮的变形情况,从而得到齿轮的刚度变化。
常用的齿轮材料力学模型包括弹性、弹塑性模型等。
在考虑温度效应的情况下,需要对材料的热膨胀系数进行修正,并考虑材料的温度变化对材料力学性能的影响。
2. 啮合接触模型2. 建立啮合接触模型,计算齿轮的啮合间隙变化。
3. 计算齿轮的温度分布,考虑齿轮材料的热膨胀系数和温度变化对齿轮啮合刚度的影响。
4. 进行温度场和应力场的耦合计算,得到齿轮的变形情况。
通过以上步骤的计算,可以得到考虑温度效应的斜齿轮时变啮合刚度。
这样的解析算法可以用于对齿轮传动系统的动力学性能进行分析和优化设计,进而提高传动系统的工作精度和可靠性。
四、实例分析与结果通过对某斜齿轮传动系统的分析,采用以上算法进行计算和模拟,得到了考虑温度效应的斜齿轮时变啮合刚度。
通过与传统的不考虑温度效应的啮合刚度进行比较,结果表明,考虑温度效应的时变啮合刚度更能反映齿轮传动系统的实际工作情况,提高了模型的精度和准确性。
考虑温度效应的斜齿轮时变啮合刚度解析算法
考虑温度效应的斜齿轮时变啮合刚度解析算法随着机械冲击和振动的不断增加,斜齿轮的动态响应和啮合刚度评估变得越来越重要。
由于斜齿轮啮合刚度是动态响应的关键参数,因此它的准确性直接影响到系统的性能和寿命。
然而,在实际应用中,由于温度的变化和滑动效应,斜齿轮的啮合刚度经常发生变化,这不利于预测和控制机械系统的动态响应。
要解决这个问题,需要一个考虑温度效应的斜齿轮时变啮合刚度解析算法。
这个算法需要综合考虑轮齿表面接触面积的变化、弹性变形的影响、温度的影响、滑动效应等多个因素,以获得更加精确的啮合刚度预测结果。
算法的基本思路是通过建立与实际相符的斜齿轮啮合模型,以确定啮合刚度与时间、温度和其他因素之间的关系。
这个模型应该考虑轮齿的尺寸、材料、表面质量、啮合点位置等因素,以确保得到准确的模拟结果。
模型的建立可以采用有限元方法或解析方法。
有限元法可以用来模拟轮齿的弹性变形和接触面积的变化,从而计算出啮合刚度的值。
解析方法则可以通过建立轮齿表面的接触压力分布来计算啮合刚度。
两种方法都需要将温度因素考虑进去。
温度的影响可以通过考虑热胀冷缩和热传导等因素来模拟。
在模拟过程中,应该考虑轮齿和工作环境的温度变化,以及轮齿表面和内部温度的梯度。
滑动效应是另一个需要考虑的因素。
在实际工作中,斜齿轮的表面不仅存在接触,还存在滑动,这使得啮合刚度的计算变得更加复杂。
为了解决这个问题,可以采用现有的材料摩擦学理论或其他方法进行分析。
综合考虑各种因素后,可以用数值方法或试验方法验证模型的准确性。
如果模型与实际情况相符,就可以用它来进行斜齿轮的啮合刚度分析和动态响应预测。
斜齿轮时变啮合刚度算法修正及影响因素研究
斜齿轮时变啮合刚度算法修正及影响因素研究刘文;李锐;张晋红;林腾蛟;杨云【摘要】针对势能法计算斜齿轮时变啮合刚度精度不足问题,提出一种刚度修正算法.考虑端面重合度大于或小于轴向重合度两种情况下单齿接触线长度的不同表达形式,建立齿根圆与基圆不重合时的变截面悬臂梁模型,采用切片法和积分思想推导并计算了斜齿轮啮合刚度,通过与ISO算法和有限元法对比分析,验证了该修正算法的可行性.在此基础上,探讨了螺旋角、模数、齿数、齿宽和压力角等参数对啮合刚度的影响.计算与分析表明,啮入段的相对时间与端面重合度和轴向重合度大小及比重有关;齿轮基本参数的变化引起重合度和单齿啮合刚度的改变,进而影响综合啮合刚度波动值和均值;当端面重合度或轴向重合度在整数附近时,啮合刚度波动值较小,而总重合度在整数附近时,啮合刚度波动值较大.与传统势能法相比,修正算法提高了斜齿轮时变啮合刚度的计算精度,在斜齿轮刚度激励的准确计算方面具有较强的实用性.%Due to the inaccuracy of potential energy method in calculation of time-varying mesh stiff-ness of helical gears,a stiffness correction algorithm was proposed.Considering the different expressions for the length of contact lines of single tooth on two kinds of situations in which the transverse contact ra-tio is greater or less than the overlap ratio,a non-uniform cantilever beam model was established when root circle and base circle misaligned,and then the mesh stiffness of helical gears was derived and calculated by using slice-integral method.By comparing with ISO standard and finite element method,the feasibility of the proposed correction algorithm was verified.Meanwhile,a parametric study was conducted to investi-gate the effects of various parameters,such as helixangle,normal module,tooth number,face width and normal pressure angle on the behavior of mesh stiffness.The calculation and analysis indicate that the rela-tive time of the engaging-in section is related to the proportion values of transverse contact ratio and over-lap ratio.Variation of gear parameters affects the fluctuation value of total mesh stiffness and average mesh stiffness by changing the contact ratios and single mesh stiffness.In addition,the fluctuation is little when the transverse contact ratio or overlap ratio is close to an integer,while it fluctuates more intensively when the total contact ratio is close to an pared with the traditional potential energy method, the precision of correction algorithm in calculating time-varying mesh stiffness of helical gears is obviously improved.It has relatively better practicability in the accurate calculation of stiffness excitation of helical gears.【期刊名称】《湖南大学学报(自然科学版)》【年(卷),期】2018(045)002【总页数】10页(P1-10)【关键词】势能法;斜齿轮;时变啮合刚度;重合度【作者】刘文;李锐;张晋红;林腾蛟;杨云【作者单位】重庆大学机械传动国家重点实验室,重庆 400044;重庆大学机械传动国家重点实验室,重庆 400044;重庆大学机械传动国家重点实验室,重庆 400044;重庆京东方光电科技有限公司,重庆 400714;重庆大学机械传动国家重点实验室,重庆400044;重庆大学机械传动国家重点实验室,重庆 400044【正文语种】中文【中图分类】TH132.41齿轮传动是机械系统中应用最广泛的运动和动力传递形式,对系统的动态特性有很大的影响.随着对机械系统性能要求的提高,齿轮传动正朝着大功率、高转速、低噪声的方向发展,而啮合刚度的时变特性是齿轮系统产生振动噪声的主要源头,它的准确计算是齿轮系统动力学分析的重要基础[1].在齿轮系统的啮合刚度方面,国内外学者进行了许多研究. 齿轮啮合刚度由轮齿的弹性变形求得,其计算主要有材料力学法、弹性力学法、石川公式法和有限元法等. 根据研究对象不同,又分为直齿轮和斜齿轮. 对于直齿轮,文献[2-4]运用势能法对直齿轮时变啮合刚度进行了计算,并分析了齿根裂纹对啮合刚度的影响;文献[5]基于有限元法分析了两种算法对直齿轮啮合刚度的影响;文献[6]提出一种基于石川公式的直齿轮啮合刚度改进算法;文献[7]基于有限元法和弹性接触理论提出了一种线性规划法计算啮合刚度的方法,并分析了齿轮结构参数和基本参数对啮合刚度的影响;文献[8-9]基于势能法将齿根简化为圆弧和直线,推导并计算了直齿轮啮合刚度,提高了其计算精度.对于斜齿轮,文献[10]提出了求解理想圆柱齿轮和斜齿轮时变啮合刚度的近似方程;文献[11]建立斜齿轮参数化数值模型并运用有限元法计算其时变啮合刚度;文献[12]将有限元法和弹性接触理论相结合来计算斜齿轮的啮合刚度;文献[13]提出了考虑安装误差时斜齿轮啮合刚度的有限元计算方法;文献[14]基于有限元法分析了不同齿轮参数对斜齿轮啮合刚度的影响规律;文献[15]运用累积积分势能法推导了斜齿轮的时变刚度,并分析了模数、齿数和齿宽的影响;文献[16]运用累积积分势能法研究了齿面剥落和局部破损对斜齿轮时变啮合强度的影响;文献[17-18]通过计算齿轮时变啮合刚度,并结合其他参数,预估了齿轮系统的振动特性和辐射噪声.以上文献取得了大量研究成果,但对于斜齿轮啮合刚度的求解,ISO标准只能计算平均啮合刚度或齿轮单齿啮合刚度的最大值,有限元法计算量较大且结构参数改变需花费大量时间重新建模,石川公式难以考虑精确渐开线齿廓. 势能法不仅可以考虑精确渐开线齿廓而且能够快速、准确求得斜齿轮的时变啮合刚度,目前基于势能法求解斜齿轮的啮合刚度虽有少量研究[15-16],但其忽略了齿根圆与基圆不重合的问题,导致计算结果存在较大误差,同时对斜齿轮啮合刚度的影响因素研究较少.本文在文献[3-4,8-9,15-16]研究成果的基础上,以斜齿轮副为研究对象,运用切片法和积分思想,提出了一种考虑齿根圆与基圆不重合时斜齿轮啮合刚度的修正算法,进一步提高了计算精度,使斜齿轮的时变啮合刚度求解更加准确. 此外,分析探讨了螺旋角、模数、齿数、齿宽、压力角的变化对斜齿轮啮合刚度的影响以及啮合刚度波动值与重合度之间的关系,为齿轮系统减振降噪设计提供了一定的理论基础.1 斜齿轮时变啮合刚度计算原理对于直齿轮来说,在不考虑重合度的情况下,每个轮齿可看作是一个变截面的悬臂梁,在齿面载荷的作用下发生变形. 如图1所示为直齿轮轮齿变截面悬臂梁模型.齿轮的时变啮合刚度包括5个部分:赫兹接触刚度kh、弯曲刚度kb、剪切刚度ks、轴向压缩刚度ka和基体刚度kf,齿轮副的啮合刚度为各部分刚度的并联形式. 对于直齿轮,各部分刚度可表示为[2-4]:(1)(2)图1 直齿轮轮齿变截面悬臂梁模型Fig.1 Cantilever beam model of spur gear tooth(3)(4)(5)式中:Uh、Ub、Us和Ua分别为储存在轮齿中的赫兹接触能量、弯曲能量、剪切能量和轴向压缩能量;F为啮合线方向的啮合力;E、G和ν分别为弹性模量、剪切模量和泊松比;B为齿宽,Ix为轮齿距离基圆x处截面的惯性距;Ax为横截面面积;d为啮合点和基圆在齿高方向的距离;h为啮合点和齿轮中心线的距离,α1为啮合力F与齿轮中心线垂直方向的夹角.由齿轮轮体变形引起的啮合线上的等效刚度即基体刚度,其表达式如式(5)所示. 式中uf和Sf如图2所示,uf和Sf可表示为[3]:uf=rb[(α1+α2)sinα1+cosα1]-rfSf=2rfθf式(5)中系数L*,M*,P*,Q*由多项式近似为[19]:(6)式(6)中:Xi*代表系数L*,M*,P*和Q*;hfi=rf /rint;rf,rint与θf如图2所示;Ai、Bi、Ci、Di、Ei和Fi的值列于表1中.图2 齿轮轮体变形几何参数Fig.2 Geometrical parameters for gear rim deformation表1 式(6)中的系数值Tab.1 Values of the coefficients for Eq.(6) L*(hfi,θf)M*(hfi,θf)P*(hfi,θf)Q*(hfi,θf)Ai-5.574E-560.111E-5-50.952E-5-6.2042E-5Bi-1.9986E-328.100E-3185.50E-39.0889E-3Ci-2.3015E-4-83.431E-40.0538E-4-4.0964E-4Di4.7702E-3-9.9256E-353.300E-37.8297E-3Ei0.02710.16240.2895-0.1472Fi6.80450.90860.92360.6904综上所述,将各部分刚度按并联方式组合即可得到一对齿轮副的啮合刚度,表示为:(7)式中:下标1和2分别指主动轮和被动轮.斜齿轮由于存在螺旋角,其啮合刚度计算与直齿轮有区别,但可以利用切片法和积分的思想,将其沿齿宽方向切分成若干片很薄的轮齿,每一部分可认为是直齿轮,通过计算各部分的啮合刚度,最后积分即可得到斜齿轮的啮合刚度. 斜齿轮的悬臂梁模型如图3所示.图3 斜齿轮悬臂梁模型Fig.3 Cantilever beam model of helical gear tooth 斜齿轮的弯曲刚度kb、剪切刚度ks和轴向压缩刚度ka分别表示为[15]:(8)(9)(10)式中:N为斜齿轮切分的份数;Δy=l/N;l为接触线长度在齿宽方向的分量.2 斜齿轮时变啮合刚度修正算法将轮齿简化为基圆上的悬臂梁模型不够精确,因为轮齿起始于齿根圆,当两者不重合时,啮合刚度将产生误差,因此有必要对斜齿轮啮合刚度算法进行修正,同时对单齿接触线长度两种表达形式下啮合刚度表达式中相关参数的不同进行详细补充.2.1 时变接触线长度在一个单齿啮合周期内,斜齿轮在啮合平面上的时变接触线长度有两种表达形式,如图4所示.(a) εα>εβ(b) εα<εβ图4 斜齿轮时变接触线长度Fig.4 Time-varying contact length of helical gear图中,βb为基圆螺旋角,Pbt为端面基圆齿距,tz为啮合周期. 单齿啮合时最大接触线长度Lmax为:(11)任意时刻单齿接触线长度L为:(12)式中ε1=min(εα,εβ),ε2=max(εα,εβ),εα、εβ分别为齿轮副端面重合度和轴向重合度.2.2 基圆半径大于齿根圆半径时的啮合刚度基圆半径大于齿根圆半径时,未修正的算法在求解啮合刚度时,将轮齿简化为基圆上的悬臂梁,相当于减小了悬臂梁的长度,未考虑基圆与齿根圆之间轮齿部分的变形,将导致啮合刚度值偏大. 修正后的轮齿变截面悬臂梁二维模型如图5所示.图5 基圆半径大于齿根圆半径时轮齿悬臂梁模型Fig.5 Cantilever beam model when the radius of base circle is greater than root circle此时每一片轮齿的弯曲势能为:(13)式中:d(y)为啮合点和基圆在齿高方向的距离;h(y)为啮合点和齿轮中心线的距离;dIx表示距齿根x处截面的面积惯性距,相关表达式为:代入式(13)中可得每一片轮齿的弯曲刚度,然后进行积分,即可得到轮齿的弯曲刚度kb:(14)式中α2=π/(2z)+invα0,其中z表示主从动齿轮的齿数,α0为压力角;hx1为齿根过渡曲线某点与齿轮中线的距离,其中r0为齿根过渡曲线半径,hb=rbsinα2.因为式(14)不可积分,所以采用求和方法替代积分方法求解斜齿轮的啮合刚度,于是斜齿轮的弯曲刚度kb可重新表示为:(15)式中:为每一片轮齿上接触线位置的啮合力F与齿轮中心线的垂线方向的夹角,根据单齿接触线长度表达形式可分两种情况讨论,其详细求解方法如下:1) 端向重合度大于轴向重合度(εα>εβ)主动轮的为:其中α1t(t)为主动轮在端面齿廓上对应的角度,式中:a'代表实际中心距,α'表示啮合角,rb和ra分别代表齿轮的基圆和齿顶圆半径. 从动轮的为:其中α2t(t)为从动轮在端面齿廓上对应的角度,2) 端向重合度小于轴向重合度(εα<εβ)主动轮的为:从动轮的为:同求解弯曲刚度kb过程类似,斜齿轮的剪切刚度ks和轴向压缩刚度ka分别为:(16)(17)2.3 基圆半径小于齿根圆半径时的啮合刚度基圆半径小于齿根圆半径时,未修正的算法在求解啮合刚度时,将轮齿简化为基圆上的悬臂梁,增加了悬臂梁的长度,多计算了基圆与齿根圆之间轮齿部分的变形,将导致啮合刚度值偏小,需要在原啮合刚度公式基础上改变积分的上限. 修正后的轮齿变截面悬臂梁二维模型如图6所示.修正后斜齿轮的弯曲刚度kb、剪切刚度ks和轴向压缩刚度ka分别表示为:(18)(19)图6 基圆半径小于齿根圆半径时轮齿悬臂梁模型Fig.6 Cantilever beam model when the radius of base circle is less than root circle(20)式中其中αf为齿根圆压力角.无论齿根圆与基圆大小关系如何,斜齿轮的赫兹接触刚度kh均为:(21)同样,斜齿轮的基体刚度kf为:(22)2.4 啮合刚度修正算法验证采用ISO 6336-1-2006算法、有限元法、文献[15]及本文的修正方法对两组传动比为1的斜齿轮副(一组齿数为20,模数为3 mm,螺旋角为15°,齿宽为30 mm,转速为1 000 r/min,另一组齿数为60,其它参数相同)的啮合刚度进行对比分析.表2和表3为各方法计算的单齿啮合刚度最大值C'和啮合刚度平均值Cγm与ISO 算法计算值误差对比,图7和图8为各方法计算的齿轮啮合刚度曲线,图中横坐标T 为无量纲时间,T=t/tε,t为时间,tε为单齿啮合时间.表2和图7为基圆半径大于齿根圆半径时(齿数为20)啮合刚度计算结果,可以看出,本文和有限元法计算结果与ISO算法最接近,单齿啮合刚度误差分别为1.11%和1.66%,啮合刚度平均值误差分别为3.64%和4.66%,文献[15]因为没有考虑基圆与齿根圆之间的变形,导致啮合刚度偏大,单齿啮合刚度和啮合刚度平均值误差分别为11.1%和13.4%.表2 基圆半径大于齿根圆半径时啮合刚度误差对比Tab.2 The relative error of mesh stiffness when the radius of base circle is greater than rootcircleC'/[108(N/m)]误差/%Cγm/[108(N/m)]误差/%ISO标准3.6104.940有限元法3.551.665.174.66文献[15]4.0111.15.6013.4本文3.651.115.123.64无量纲时间T图7 基圆半径大于齿根圆半径时啮合刚度对比曲线Fig.7Comparison of mesh stiffness when the radius of base circle is greater than root circle表3和图8为基圆半径小于齿根圆半径时(齿数为60)啮合刚度计算结果,可以看出,本文和有限元法计算结果与ISO算法最接近,单齿啮合刚度误差分别为1.84%和0.46%,啮合刚度平均值误差分别为2.12%和3.48%,文献[15]因为多计算了基圆与齿根圆之间的变形,导致啮合刚度偏小,单齿啮合刚度和啮合刚度平均值误差分别为19.8%和19.7%.表3 基圆半径小于齿根圆半径时啮合刚度误差对比Tab.3 The relative error of mesh stiffness when the radius of base circle is less than rootcircleC'/[108(N/m)]误差/%Cγm/[108(N/m)]误差/%ISO标准4.3406.600有限元法4.360.466.833.48文献[15]3.4819.85.3019.7本文4.421.846.742.12无量纲时间T图8 基圆半径小于齿根圆半径时啮合刚度对比曲线Fig.8 Comparison of mesh stiffness when the radius of base circle is less than root circle3 斜齿轮基本参数对啮合刚度的影响斜齿轮的基本参数主要包括模数、齿数、螺旋角、齿宽、压力角等,为揭示各参数对啮合刚度的影响,以表4中的参数为基准,通过改变基本参数开展研究.3.1 螺旋角将表4中斜齿轮副的螺旋角分别设为6°、9°、12°、15°、18°和21°,其他参数保持不变,不同螺旋角时斜齿轮的重合度如表5所示,对应的单齿与综合啮合刚度曲线如图9所示(图中虚线为单齿啮合刚度,实线为综合啮合刚度). 可以看出,螺旋角增大使端面重合度减小,轴向重合度增大,总重合度增大;齿轮副由两齿/三齿交替啮合逐渐过渡到三齿/四齿交替啮合,且多齿啮合区的啮合刚度不一定大于少齿啮合区的啮合刚度.此外,螺旋角较小时,端面重合度大于轴向重合度,螺旋角增大使轴向重合度在总重合度中的比重逐渐增加,啮入段的相对时间增加;随着螺旋角继续增大,当螺旋角增加至端面重合度小于轴向重合度,啮入段的相对时间将减少. 同时,螺旋角增大对啮合刚度均值和波动值ΔCγ影响较小,啮合刚度均值基本不发生变化. 结合表5和图9可看出,当轴向重合度靠近整数时,啮合刚度的波动值较小.表4 斜齿轮副的主要参数Tab.4 Key parameters of helical gears参数名称数值参数名称数值模数mn/mm4齿数z1/z250/50螺旋角β/°15齿宽B/mm50压力角αn/°20变位系数xn1/xn20/0弹性模量E/Pa2.06+E11泊松比v0.3表5 不同螺旋角的重合度Tab.5 Contact ratio with different helix angles螺旋角β/°端面重合度εα轴向重合度εβ总重合度εγ61.7410.4162.15791.7230.6222.346121.6990.8272.526151.6681.0302.698 181.6301.2302.860211.5861.4263.012图9 不同螺旋角时单齿与综合啮合刚度Fig.9 Single and total mesh stiffness with different helix angles为明确重合度和啮合刚度波动值之间的关系,令螺旋角从0°每间隔1°变化到35°,对应的啮合刚度波动值曲线如图10所示.螺旋角β/(°)图10 不同螺旋角的啮合刚度波动值Fig.10 Mesh stiffness fluctuation value with different helix angles由图10可以看出,随着螺旋角的增大,啮合刚度波动值并非单调下降. 当螺旋角为15°和30°时,啮合刚度波动值均处于极小值位置,此时对应的轴向重合度恰好在整数附近. 与此同时,当螺旋角为3°和22°时,啮合刚度波动值均处于极大值位置,此时总重合度恰好在整数附近. 而对于直齿轮而言,端面重合度在整数附近时,啮合刚度波动值较小[1]. 因此可以得出,当端面重合度或轴向重合度接近整数时,斜啮合刚度将具有较小的波动值,当总重合度接近整数时,斜啮合刚度将具有较大的波动值.传统观点认为重合度越大,齿轮系统运转越平稳,其实这一观点值得商榷. 系统运转稳定性与啮合刚度波动值有直接联系,因此工程实践中可考虑将轴向重合度调整至整数附近以降低系统的振动.3.2 模数和齿数在设计初期,齿轮系统和齿轮箱的大体尺寸就已确定,因此在改变齿数的同时,也应相应改变模数以保证中心距不变. 将齿数从30每间隔10变化到80,相应的模数从6.67 mm变化至2.5 mm,对应的单齿啮合刚度如图11所示,啮合刚度波动值和均值如图12所示. 齿数增加使端面重合度和轴向重合度增大,但轴向重合度在总重合度中的比重增加,因此啮入段的相对时间增加;但单齿啮合刚度最大值未发生明显变化,同时由于总重合度增加,导致啮合刚度均值略有增加;轴向重合度在整数附近时(z=50,εβ=1.030),啮合刚度波动值较小,总重合度在整数附近时(z=70,εγ=3.155),啮合刚度波动值较大.时间t/ms图11 不同齿数和模数的单齿啮合刚度Fig.11 Single mesh stiffness with different tooth and modules齿数z图12 不同齿数和模数的啮合刚度波动值与均值Fig.12 Mesh stiffness fluctuation and average value with different tooth and modules3.3 齿宽齿宽增加时不影响齿轮副端面重合度,而使轴向重合度增加,因此啮入段的相对时间增加. 齿宽增加使轮齿接触变形、弯曲变形、剪切变形、轴向压缩变形和基体变形减小,从而使单齿啮合刚度增加. 将齿宽从30 mm每隔10 mm增加至80 mm,对应的单齿啮合刚度如图13所示. 重合度与单齿啮合刚度增加使啮合刚度均值接近线性规律增加,轴向重合度在整数附近时(B=50,εβ=1.030),啮合刚度波动值较小,如图14所示.时间t/ms图13 不同齿宽的单齿啮合刚度Fig.13 Single mesh stiffness withdifferent face widths齿宽B/mm图14 不同齿宽的啮合刚度波动值与均值Fig.14 Mesh stiffness fluctuation and average value with different face widths3.4 压力角当压力角增大时,齿顶变薄而齿根变厚,齿面曲率半径会增大,从而提高轮齿的齿面接触强度和齿根弯曲强度. 不同压力角的单齿啮合刚度如图15所示,由图15可以看出压力角增加使轮齿接触变形和弯曲变形减小,从而使单齿啮合刚度最大值增加;同时轴向重合度在总重合度中的比重增加,因此啮入段的相对时间增加. 将齿轮的法面压力角从15°每间隔1°变化至25°,对应的啮合刚度波动值和均值如图16所示. 由图16可以看出,虽然单齿啮合刚度有所增加,但是总重合度减小,因此啮合刚度均值随着压力角的增加并非呈现单调减小趋势,同时压力角的变化不影响轴向重合度,所以啮合刚度波动值未发生明显变化,均处于较小的位置.时间t/ms图15 不同压力角的单齿啮合刚度Fig.15 Single mesh stiffness with different pressure angles压力角αn/(°)图16 不同压力角的啮合刚度波动值与均值Fig.16 Mesh stiffness fluctuation and average value with different pressure angles4 结论1) 基于势能法提出了一种考虑齿根圆与基圆不重合时的斜齿轮时变啮合刚度修正方法,通过与ISO算法和有限元法的对比分析,验证了该修正算法的可行性,提升了斜齿轮啮合刚度的计算精度.2) 分析探讨了螺旋角、模数、齿数、齿宽、压力角的变化对斜齿轮啮合刚度的影响. 啮入段的相对时间与端面重合度和轴向重合度大小及比重有关;齿轮副的重合度和单齿啮合刚度随齿轮参数的变化而改变,进而影响综合啮合刚度的波动值和均值. 计算与分析结果可为斜齿轮传动参数的优化选取提供参考.3) 重合度是影响啮合刚度波动值的重要因素. 当端面重合度或轴向重合度在整数附近时,啮合刚度波动值较小,而总重合度在整数附近时,啮合刚度波动值较大. 在设计中应合理搭配齿轮参数,一方面应保证较大的重合度,使更多的齿同时受载,同时需确保啮合刚度的波动值较小,从而降低系统的振动.参考文献[1] 李润方, 王建军. 齿轮系统动力学[M]. 北京:科学出版社, 1997: 11-48.LI R F, WANG J J. Systematic dynamics of gear[M]. Beijing: Science Press, 1997: 11-48. (In Chinese)[2] CUI L, ZHAI H, ZHANG F. Research on the meshing stiffness and vibration response of cracked gears based on the universal equation of gear profile[J]. Mechanism and Machine Theory, 2015, 94: 80-95.[3] CHAARI F, FAKHFAKH T, HADDAR M. Analytical modelling of spur gear tooth crack and influence on gear mesh stiffness[J]. European Journal of Mechanics-A/Solids, 2009, 28(3): 461-468.[4] CHEN Z, SHAO Y. Dynamic simulation of spur gear with tooth root crack propagating along tooth width and crack depth[J]. Engineering Failure Analysis, 2011, 18(8): 2149-2164.[5] COOLEY C G, LIU C, DAI X, et al. Gear tooth mesh stiffness: A comparison of calculation approaches[J]. Mechanism and Machine Theory, 2016, 105: 540-553.[6] 李亚鹏, 孙伟, 魏静, 等. 齿轮时变啮合刚度改进计算方法[J]. 机械传动, 2010, 34(5): 22-26.LI Y P, SUN W, WEI J, et al. Study on the improved algorithm of the time-varying meshing stiffness of gear[J]. Journal of Mechanical Transmission,2010, 34(5): 22-26. (In Chinese)[7] CHANG L, LIU G, WU L. A robust model for determining the mesh stiffness of cylindrical gears[J]. Mechanism and Machine Theory, 2015, 87: 93-114.[8] WAN Z, CAO H, ZI Y, et al. An improved time-varying mesh stiffness algorithm and dynamic modeling of gear-rotor system with tooth root crack[J]. Engineering Failure Analysis, 2014, 42: 157-177.[9] LIANG X, ZUO M J, PANDEY M. Analytically evaluating the influence of crack on the mesh stiffness of a planetary gear set[J]. Mechanism and Machine Theory, 2014, 76: 20-38.[10]GU X, VELEX P, SAINSOT P, et al. Analytical investigations on the mesh stiffness function of solid spur and helical gears[J]. Journal of Mechanical Design, 2015, 137(6): 063301.[11]HEDLUND J, LEHTOVAARA A. A parameterized numerical model for the evaluation of gear mesh stiffness variation of a helical gear pair[J]. Drive System Technique,2012, 222(7): 1321-1327.[12] 常乐浩, 刘更, 郑雅萍,等. 一种基于有限元法和弹性接触理论的齿轮啮合刚度改进算法[J]. 航空动力学报, 2014, 29(3):682-688.CHANG L H, LIU G, ZHENG Y P, et al. A modified method for determining mesh stiffness of gears based on finite element method and elastic contact theory[J]. Journal of Aerospace Power, 2014, 29(3): 682-688. (In Chinese) [13]刘宝山, 杜群贵, 文奇. 考虑安装误差的斜齿轮啮合刚度计算与分析[J]. 机械传动, 2017(3):33-37.LIU B S, DU Q G,WEN Q. Calculation and analysis of meshing stiffness ofhelical gear considering installation error[J]. Journal of Mechanical Transmission, 2017(3):33-37. (In Chinese)[14]LIU L, DING Y, WU L, et al. Effects of contact ratios on mesh stiffness of helical gears for lower noise design[C]//International Gear Conference 2014. Lyon: Chandos Publishing, 2014: 320-329.[15]WAN Z, CAO H, ZI Y, et al. Mesh stiffness calculation using an accumulated integral potential energy method and dynamic analysis of helical gears[J]. Mechanism and Machine Theory, 2015, 92: 447-463. [16]HAN L, QI H. Influences of tooth spalling or local breakage on time-varying mesh stiffness of helical gears[J]. Engineering Failure Analysis, 2017, 79:75-88.[17]CHEN S, TANG J, HU Z. Comparisons of gear dynamic responses with rectangular mesh stiffness and its approximate form[J]. Journal of Mechanical Science and Technology, 2015, 29(9): 3563-3569.[18]林腾蛟, 何泽银, 钟声, 等. 船用齿轮箱多体动力学仿真及声振耦合分析[J]. 湖南大学学报(自然科学版),2015, 42(2): 22-28.LIN T J, HE Z Y, ZHONG S, et al. Multi-body dynamic simulation and vibro-acoustic coupling analysis of marine gearbox[J]. Journal of Hunan University(Natural Sciences), 2015, 42(2): 22-28. (In Chinese)[19]SAINSOT P, VELEX P, DUVERGER O. Contribution of gear body to tooth deflections——A new bidimensional analytical formula[J].Journal of Mechanical Design, 2004, 126(4): 748-752.。
考虑温度效应的斜齿轮时变啮合刚度解析算法
考虑温度效应的斜齿轮时变啮合刚度解析算法斜齿轮是一种常用的传动装置,其啮合刚度是影响传动系统动态特性的重要因素之一。
在实际工程中,温度对斜齿轮的啮合刚度影响并不容忽视。
考虑温度效应的斜齿轮时变啮合刚度解析算法成为了研究的焦点之一。
本文将首先介绍斜齿轮传动系统的基本原理和温度效应对啮合刚度的影响,接着提出一种考虑温度效应的斜齿轮时变啮合刚度解析算法,并进行相关的理论分析和数值仿真,最后总结和展望未来的研究方向。
一、斜齿轮传动系统的基本原理斜齿轮是利用斜齿直齿轮的啮合作用进行传动的装置,其工作原理类似于直齿轮,但由于斜齿的存在,使得传动更加平稳和静音。
斜齿轮传动系统一般由两个或多个齿轮组成,通过齿轮的啮合来传递动力和转矩。
二、温度效应对啮合刚度的影响温度对斜齿轮的啮合刚度有着直接的影响。
在实际工作中,斜齿轮传动系统由于长时间的摩擦和啮合,会产生一定的温升效应,导致齿轮材料的温度升高。
而温度的升高会导致齿轮材料的热膨胀,从而影响啮合刚度的大小。
温度的变化还会引起齿轮材料性能的变化,例如弹性模量、热膨胀系数等,进而影响啮合刚度。
考虑温度效应对斜齿轮的啮合刚度进行研究具有重要的意义。
为了更准确地描述斜齿轮传动系统在不同温度下的啮合刚度,我们提出了一种考虑温度效应的斜齿轮时变啮合刚度解析算法。
该算法首先考虑了齿轮材料的热膨胀效应,并将其引入到啮合刚度的计算中。
还考虑了温度对齿轮材料性能的影响,如弹性模量、热膨胀系数等,通过相应的数学模型进行描述。
得到了考虑温度效应的斜齿轮时变啮合刚度的解析表达式。
四、理论分析和数值仿真我们还对不同工况下的温度变化对啮合刚度的影响进行了分析,得到了一些有益的结论。
在高温环境下,啮合刚度明显减小;在长时间工作后,啮合刚度也会有所降低。
这些结果为实际工程中的斜齿轮传动系统设计和优化提供了重要的参考依据。
五、总结和展望未来,我们将进一步完善考虑温度效应的斜齿轮时变啮合刚度解析算法,探索更多的温度变化对齿轮传动系统动态特性的影响。
考虑温度效应的斜齿轮时变啮合刚度解析算法

考虑温度效应的斜齿轮时变啮合刚度解析算法在实际工作中,斜齿轮传动系统在长时间运行过程中,由于传动部件材料的热膨胀和工作环境温度的影响,会出现温度变化。
这种温度变化会导致传动部件的尺寸和性能发生变化,从而对传动系统的工作性能产生影响。
特别是对于斜齿轮传动系统中的时变啮合刚度来说,温度的变化会直接影响到啮合刚度的大小和分布,进而影响到整个传动系统的工作精度和稳定性。
由于温度对斜齿轮传动系统的影响十分复杂,造成的问题也十分严重。
如何对斜齿轮时变啮合刚度进行准确的解析和计算成为了当前研究的热点之一。
针对此问题,一些学者提出了一些解析算法来考虑温度效应的斜齿轮时变啮合刚度,以提高斜齿轮传动系统的工作性能。
要考虑斜齿轮传动系统在不同温度下的尺寸变化和材料性能变化。
随着温度的升高,传动零部件的尺寸会发生变化,而材料的性能也会发生变化。
这些变化将直接影响到斜齿轮传动系统的结构和工作性能。
要对传动零件在不同温度下的尺寸变化和材料性能变化进行准确的分析和计算,并将其考虑到时变啮合刚度的解析算法中。
对于斜齿轮传动系统的结构参数和工作状态进行准确的建模和仿真分析。
在考虑温度效应的斜齿轮时变啮合刚度解析算法中,需要对传动系统的结构参数和工作状态进行准确的建模和仿真分析。
通过建立精确的模型来描述斜齿轮传动系统在不同温度下的工作状态,可以更好地考虑到温度效应对啮合刚度的影响,从而提高解析算法的准确性和可靠性。
通过实验验证和仿真分析来验证解析算法的有效性。
在考虑温度效应的斜齿轮时变啮合刚度解析算法中,需要通过实验验证和仿真分析来验证算法的有效性。
通过对不同温度下的斜齿轮传动系统进行实际测试和仿真分析,可以验证解析算法对温度效应的考虑是否准确,并进一步改进算法的精度和可靠性。
一种斜齿轮啮合刚度的简易求解方法
·118·第19卷第1期遵义师范学院学报2017年2月在对齿轮传动系统进行动力学分析时,确定系统的动态激励往往是首要问题[1]。
根据来源不同,齿轮系统的动态激励主要分为外部激励和内部激励。
外部激励主要是指驱动系统的主动力矩和负载设备的阻力矩;内部激励主要是指在齿轮啮合过程产生的一些动态激励,包括误差激励、啮合冲击激励和刚度激励。
在这些激励中,刚度激励由于时变性和复杂性使其成为齿轮动态激励求解的一大难题,尤其是对于斜齿轮而言,其啮合过程中的轮齿变形在空间中呈螺旋状分布,且是非线性的,因此求解难度非常大。
从目前来看,对于斜齿轮刚度激励的求解通常都是基于轮齿弹性变形理论[1-3],常用的方法有积分法[4]和有限元法[5]。
利用这两种方法可以获得十分精确的数值解,但是过程相当复杂,通常都需要高配置的计算机经过长时间的计算后方可求得,因此大大增加了求解的经济成本和时间成本。
针对现行方法需要进行大量计算等问题,本文提出了一种简单、高效的斜齿轮啮合刚度近似解法,并通过与常规方法的求解结果进行比较,论证了该方法的可行性。
1斜齿轮副啮合过程分析斜齿轮副的啮合过程如图1所示。
假设上面的齿轮为主动轮,下面的齿轮为从动轮,r o1、r o2分别为它们的基圆半径,E 1代表从动轮前端面的齿廓(实线部分),E 2代表从动轮后端面的齿廓(虚线部分),两者的齿形错位角记为1,假设某端面的齿阔由进入啮合到退出啮合过程中所转过的角度为2,N 1、N 2分别为理论啮合线的起始点和终止点,B 1、B 2分别为实际啮合线的起始点和终止点,n 1为主动轮的转速。
收稿日期:2016-09-19作者简介:张强,男,重庆人,遵义师范学院工学院讲师,硕士。
一种斜齿轮啮合刚度的简易求解方法张强,刘晓宇,汪玉兰,何鸣(遵义师范学院工学院,贵州遵义563006)摘要:通过对斜齿轮副啮合过程进行分析,得到其啮合线总长度的计算公式;并假定轮齿变形和受载均在接触线长度方向上呈均匀分布,由此推导出斜齿轮时变啮合刚度的近似计算公式。
斜齿轮动力学建模中啮合刚度处理与对比验证_王峰
。 齿轮
系统作为机械传动系统的重要组成部分, 其动态特性 2 - 4] 会直接影响齿轮传动系统运行的稳定性 。 文献[ 由线性、 非线性角度, 建立齿轮 - 转子系统动力学模 型, 并用数值仿真方法研究齿轮动力学系统振动噪声 等特性。在齿轮系统动力学建模中, 啮合刚度的计算 5] 处理一直是研究难点, 文献[ 利用瞬时啮合线总长度 6] 近似计算传动斜齿轮副啮合刚度 ; 文献[ 分析时变啮
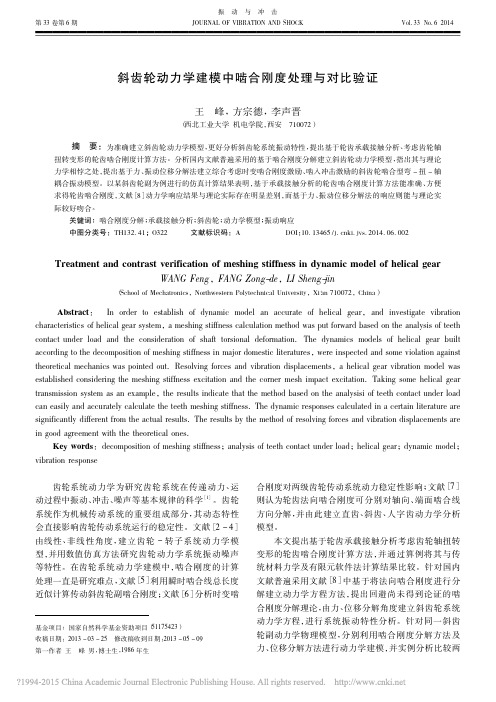
图4 斜齿轮副五齿有限元模型仿真实例
示为:
T { δ} = { y p , zp , yg , zg , θp , θg }
Fig. 4 Simulation of five teeth finite element model
zi , g) 分别为主、 式中: y i , θ i ( i = p, 从动斜齿轮中心点 O p 以表 1 某船用单级斜齿轮副参数作为本文啮合刚 度计算分析实例, 分别将材料力学法、 有限元软件法及 本文所提基于轮齿承载接触分析的啮合刚度计算法结 果进行比较。见图 5 。
图1 齿轮轴扭转变形角 deformation angle
Fig. 1 Gear shaft torsional
获得轮齿承载接触分析。 利用 对齿面柔度矩阵影响, 一维有限元方法分别计算小齿轮轴、 大齿轮轴扭转变 形, 将齿轮沿轴向分为与齿面网格对应的 N 段, 设置 N + 1 个节点, 在工作齿面网格每个节点施加单位法向载 2, …, N; j = 1 , 2, …, 荷, 计算获得轴扭转角 φ ij ( i = 1 , N) , j 点相对齿轮扭 φ ij 为在 i 点施加单位法向载荷时, 矩输入端转角。见图 1 , 设沿轴向将齿轮分为 6 段, 从 右端输入扭矩, 则法向柔度系数为: γ ij = φ ij r b 其中: 脚标 i 表示施加载荷节点编号; j 为产生变形节点 编号; r b 为基圆半径。 为考虑齿轮扭转变形对齿面柔度矩阵影响, 将扭 转变形产生的附加柔度矩阵与齿面网格法向柔度矩阵 叠加, 获得齿轮系统齿面综合法向柔度矩阵。 用叠加 即可获得考虑 后柔度系数按轮齿接触分析方法计算, 扭转变形影响的承载接触分析。 1. 2 轮齿啮合刚度计算思路 一对齿轮啮合的两齿面由于传递载荷作用, 必会 产生含弯曲变形、 剪切变形、 接触变形等的弹性变形, 称抵抗弹性变形能力为单齿啮合刚度, 某一瞬时同时 参与啮合的几对轮齿刚度叠加称为轮齿在此时刻的综 合啮合刚度。 本文采用的基于轮齿承载接触分析的轮齿啮合刚 度计算方法基本思路为通过轮齿接触分析及轮齿承载 接触分析, 利用变形协调方程、 力平衡及非嵌入条件求 得啮合齿面法向接触综合变形量, 经换算获得轮齿综 合啮合刚度。其中综合考虑齿轮制造加工工艺导致的 齿面误差影响、 传递载荷齿轮轴扭转变形产生的附加 安装误差及齿面 柔度矩阵对齿面综合柔度矩阵影响、 修形影响, 可较准确计算轮齿啮合刚度。 图 2 为基于 承载接触分析的啮合刚度计算方法思路流程 。 1. 3 与经典方法比较 在轮齿啮合刚度计算中, 材料力学求解刚度方法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力 学相悖之处 , 提出基 于力 、 振动位移 分解 法建立综合考虑时变 啮合 刚度激 励 、 啮入 冲击激励 的斜齿轮 啮合 型弯 一 扭一 轴
耦 合振动模型 。以某斜齿轮 副为 例进 行的仿真计算结果表 明 , 基于 承载接触 分析 的轮 齿啮合刚度 计算方法 能准确 、 方 便 求得轮齿啮合刚度 , 文献 [ 8 ] 动力学响应结果 与理论 实际存在明显差别 , 而基 于力 、 振动位移 分解法 的响应则能与 理论 实
c h a r a c t e i r s t i c s o f h e l i c a l g e a r s y s t e m ,a me s h i n g s t i f f n e s s c a l c u l a t i o n me t h o d wa s p u t f o r w a r d f t e e t h c o n t a c t u n d e r l o a d a n d t h e c o n s i d e r a t i o n o f s h a f t t o r s i o n a l d e f o r ma t i o n .T h e d y n a mi c s mo d e l s o f h e l i c a l g e a r b u i l t
a c c o r d i n g t o t h e d e c o m p o s i t i o n o f m e s h i n g s t i f f n e s s i n m a j o r d o m e s t i c l i t e r a t u r e s , w e r e i n s p e c t e d a n d s o m e v i o l a t i o n a g a i n s t
W A NG F e n g , F A NG z o n g — d e , L I S h e n g - j i n
( S c h o o l o f Me c h a t r o n i c s , N o r t h w e s t e r n P o l y t e c h n i c a l U n i v e r s i t y , X i n 7 1 0 0 7 2 ,C h i n a )
振 第3 3卷第 6期
动
与
冲
击
J 0URNAL OF VI BRATI ON AND S HOCK
斜 齿 轮 动 力 学 建模 中啮合 刚度 处 理 与对 比验证
王 峰, 方宗德 , 李声晋
7 1 0 0 7 2 )
( 西北 工业 大学 机 电学 院 , 西安
摘 要 :为准确建立斜齿轮动力学模型, 更好分析斜齿轮系统振动特性, 提出基于轮齿承载接触分析、 考虑齿轮轴
Abs t r a c t : I n o r d e r t o e s t a b l i s h o f d y n a mi c mo d e l a n a c c u r a t e o f h e l i c a l g e a r ,a n d i n v e s t i g a t e v i b r a t i o n
e s t a b l i s h e d c o n s i d e in r g t he me s h i n g s t i f f n e s s e x c i t a t i o n a nd t h e c o me r me s h i mpa c t e x c i t a t i o n.Ta k i n g s o me he l i c a l g e a r
t r a n s mi s s i o n s y s t e m a s a n e x a mp l e ,t h e r e s u l t s i n d i c a t e t h a t t h e me t h o d b a s e d o n t h e a n a l y s i s i o f t e e t h c o n t a c t u n d e r l o a d c a n e a s i l y a n d a c c u r a t e l y c a l c u l a t e t h e t e e t h me s h i n g s t i f f n e s s .T h e d y n a mi c r e s p o n s e s c a l c u l a t e d i n a c e r t a i n l i t e r a t u r e a y e
t h e o r e t i c a l me c h a n i c s w a s p o i n t e d o u t . Re s o l v i n g f o r c e s a n d v i b r a t i o n d i s p l a c e me n t s ,a h e l i c l a g e a r v i b r a t i o n mo d e l wa s
际较好吻合 。 关键词 :啮合 刚度分解 ; 承载接触分析 ; 斜齿轮 ; 动力学模型 ; 振动响应
中 图分 类 号 :T H1 3 2 . 4 1 ; 0 3 2 2 文献 标 识 码 :A D O I : 1 0 . 1 3 4 6 5 / j . c n k i . j V S . 2 0 1 4 . 0 6 . 0 0 2
Tr e a t me nt a n d c o nt r a s t v e r i ic f a t i o n o f me s h i n g s t i fne s s i n dy n a mi c mo d e l o f h e l i c a l g e a r