可逆直流调速系统PPT幻灯片课件
合集下载
可逆控制和弱磁控制的直流调速系统PPT课件
整流状态:
n
电动机工作于第
一象限
逆变状态:
O
电动机工作于第
四象限
-n
提升
Te
TL
Id
放下
图4-3c 单组V-M系统带起重机类型负载时的整流和逆变状态
整流状态
R
V+
Ud0 P
+
n
E -M-
-
Id
-
逆变状态
V-
-Ud0 +
R
-
P
E -Mn
Id +
同一套(单组)晶 闸管装置既可以 工作在整流状态, 也可在逆变状态。
+Us
4
VD1
VD3
A
+
-
MM
B
VD2
VD4
3
VT3 Ug3
VT4 Ug4
图4-2 桥式可逆PWM变换器
U, i 输出波形
U, i
+Us
+Us
Ud
E
O0 ton T
id t O0
ton T
t
id
E
-Us
Ud
(1) 正向电动运行波形
-Us(2) 反向电动运行波形
双极式控制可逆PWM变换器的输出平均电压
Rb
VT1
Ug1
C
A
VVTT2 b
VT2 Ug2
VD1
VD3
+
-
MM
VD2
VD4
VT VT3
B
VT VT4
Uc
图1-18
桥式可逆PWPMW变换M器控制器
4.2 V-M可逆直流调速系统
《直流电机调速》课件

直流电机调速的分类
直流电机调速可以分为线性调速和PWM调速两种方式。线性调速是通过改变电 机的输入电压或电流来实现调速的,而PWM调速则是通过改变电机输入电压的 占空比来实现调速的。
PWM调速具有更高的调速精度和更小的电机发热量,因此在许多应用中得到了 广泛的应用。
02
直流电机调速的方法
改变电枢电压调速
总结词
通过改变电枢两端的电压,可以调节直流电机的转速。
详细描述
当电枢两端电压增加时,电机转速相应增加;反之,当电压减小时,电机转速 相应降低。这种方法调速范围广,但需要可调直流电源,控制电路相对复杂。
改变励磁电流调速
总结词
通过改变励磁绕组的电流,可以调节 直流电机的磁场强度,进而调节电机 转速。
详细描述
02
直流电机调速是一种常见的电机 调速方式,具有调速范围广、调 速线性度好、动态响应快等优点 。
直流电机调速的原理
直流电机调速的原理基于直流电机的电磁转矩与电枢电流成 正比的特性。通过改变电枢电流的大小,可以改变电机的输 出转矩,从而调节电机的转速。
另外,直流电机还具有电枢反电动势,它与电枢电流的大小 成正比。改变电机的输入电压或电流,可以改变电机的输入 功率,进一步调节电机的转速。
控制复杂度较高
直流电机调速系统的控制算法相对复 杂,需要专业的技术人员进行维护和 调试。
05
直流电机调速的发展趋势
高性能直流电机调速系统的研究
总结词
随着工业自动化水平的提高,对直流电机调 速系统的性能要求也越来越高,高性能直流 电机调速系统的研究成为重要的发展趋势。
详细描述
为了满足高精度、高动态响应的调速需求, 研究者们不断探索新的控制算法和优化策略 ,以提高直流电机调速系统的调节精度、稳 定性和动态响应能力。
《直流调速控制系统》课件

分,通过接收控制器的控制信号实现转速的调节。
02
直流调速控制系统的主要技术指标
调速范围与静差率
调速范围
指控制系统能够调节的最高和最低转速之比。例如,如果最高转速为1000转/分,最低转速为10转/分,则调速 范围为100:1。
静差率
指在给定的转速变化下,系统的输出转速变化与输入转速变化的比值。例如,如果输入转速变化1%,输出转速 变化2%,则静差率为2%。
03
控制器选择
选择合适的控制器,如单片机、 DSP等,用于实现控制算法和控 制逻辑。
04
软件设计
控制算法选择
选择合适的控制算法,如PID控制、模糊控制 等。
控制逻辑设计
设计合适的人机界面,方便用户对系统进行 操作和控制。
人机界面设计
根据控制算法和控制需求,设计控制逻辑, 实现系统的自动控制。
数据处理程序设计
调速平滑性
调速平滑性
指系统在调节过程中,输出转速变化的连续性和平滑程度。平滑性好的系统, 输出转速变化连续、无突变,对被控对象的振动和冲击小。
调节时间
指系统从某一转速调节到另一转速所需的时间。调节时间越短,系统的响应速 度越快。
动态响应时间与超调量
动态响应时间
指系统在阶跃输入下,达到稳态值的 90%所需的时间。动态响应时间越短 ,系统的快速性越好。
选择合适的仿真软件,如MATLAB/Simulink等,用于建立直流调速控制系统的仿真模 型。
仿真模型建立
根据直流调速控制系统的原理,建立仿真模型的各个模块,包括电机模型、控制器模型 、测速模型等。
仿真结果分析
对仿真结果进行分析,验证仿真模型的正确性和有效性。同时,通过对比实验结果和仿 真结果,进一步理解直流调速控制系统的性能特点和控制效果。
02
直流调速控制系统的主要技术指标
调速范围与静差率
调速范围
指控制系统能够调节的最高和最低转速之比。例如,如果最高转速为1000转/分,最低转速为10转/分,则调速 范围为100:1。
静差率
指在给定的转速变化下,系统的输出转速变化与输入转速变化的比值。例如,如果输入转速变化1%,输出转速 变化2%,则静差率为2%。
03
控制器选择
选择合适的控制器,如单片机、 DSP等,用于实现控制算法和控 制逻辑。
04
软件设计
控制算法选择
选择合适的控制算法,如PID控制、模糊控制 等。
控制逻辑设计
设计合适的人机界面,方便用户对系统进行 操作和控制。
人机界面设计
根据控制算法和控制需求,设计控制逻辑, 实现系统的自动控制。
数据处理程序设计
调速平滑性
调速平滑性
指系统在调节过程中,输出转速变化的连续性和平滑程度。平滑性好的系统, 输出转速变化连续、无突变,对被控对象的振动和冲击小。
调节时间
指系统从某一转速调节到另一转速所需的时间。调节时间越短,系统的响应速 度越快。
动态响应时间与超调量
动态响应时间
指系统在阶跃输入下,达到稳态值的 90%所需的时间。动态响应时间越短 ,系统的快速性越好。
选择合适的仿真软件,如MATLAB/Simulink等,用于建立直流调速控制系统的仿真模 型。
仿真模型建立
根据直流调速控制系统的原理,建立仿真模型的各个模块,包括电机模型、控制器模型 、测速模型等。
仿真结果分析
对仿真结果进行分析,验证仿真模型的正确性和有效性。同时,通过对比实验结果和仿 真结果,进一步理解直流调速控制系统的性能特点和控制效果。
直流电机及调速系统课件79页PPT
直流电机及调速系统
直流电机工作原理
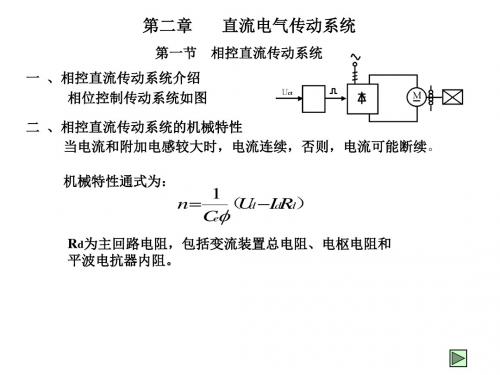
从图中可以看出,接入直流电源以后,电刷A为正极性,电刷B为负极性。
电流从正电刷A经线圈ab、cd,到负电刷B流出。根据电磁力定律,在载流导体
与磁力线垂直的条件下,线圈每一个有效边将受到一电磁力的作用。电磁力的
方向可用左手定则判断,伸开左手,掌心向着N极,4指指向电流的方向,与4 指垂直的拇指方向就是电磁力的方向。在图示瞬间,导线ab与dc中所受的电磁 力为逆时针方向,在这个电磁力的作用下,转子将逆时针旋转.即图中S的方向。
? ? ? ? ?
设计目标
拟定其传动系统 选择伺服电机 确定反馈控制结构 选择伺服系统的参
数
伺服系统设计实例_分析1
解决问题的方法 通过数学建模来分析整个系统的问题
信号
驱动单元数学模型 电机单元数学模型 机械单元数学模型
目标运动
伺服系统设计实例_分析2
数学建模来分析整个系统的问题 数学模型应解决什么问题 数学模型如何来实现互联
直流伺服电机控制系统 速度负反馈闭环调速系统的结构
右图为一数控 机床进给部件 中的电机调速 系统接线图
它是一个速度 负反馈闭环 调速系统
控制
驱动
电机
电源 电源
电机调速系统实例_1 (B)
直流伺服电机控制系统 速度负反馈闭环调速系统的结构
电机调速系统实例_1 (C)
直流伺服电机控制系统 速度负反馈闭环调速系统的结构
直流伺服电机调速驱动单元 结构实例
直流伺服电机调速驱动单元 结构实例
速度指令
电机 测速电机
直流伺服电机调速驱动单元 结构实例
速度单元
速度指令
电机 测速电机
直流电机工作原理
从图中可以看出,接入直流电源以后,电刷A为正极性,电刷B为负极性。
电流从正电刷A经线圈ab、cd,到负电刷B流出。根据电磁力定律,在载流导体
与磁力线垂直的条件下,线圈每一个有效边将受到一电磁力的作用。电磁力的
方向可用左手定则判断,伸开左手,掌心向着N极,4指指向电流的方向,与4 指垂直的拇指方向就是电磁力的方向。在图示瞬间,导线ab与dc中所受的电磁 力为逆时针方向,在这个电磁力的作用下,转子将逆时针旋转.即图中S的方向。
? ? ? ? ?
设计目标
拟定其传动系统 选择伺服电机 确定反馈控制结构 选择伺服系统的参
数
伺服系统设计实例_分析1
解决问题的方法 通过数学建模来分析整个系统的问题
信号
驱动单元数学模型 电机单元数学模型 机械单元数学模型
目标运动
伺服系统设计实例_分析2
数学建模来分析整个系统的问题 数学模型应解决什么问题 数学模型如何来实现互联
直流伺服电机控制系统 速度负反馈闭环调速系统的结构
右图为一数控 机床进给部件 中的电机调速 系统接线图
它是一个速度 负反馈闭环 调速系统
控制
驱动
电机
电源 电源
电机调速系统实例_1 (B)
直流伺服电机控制系统 速度负反馈闭环调速系统的结构
电机调速系统实例_1 (C)
直流伺服电机控制系统 速度负反馈闭环调速系统的结构
直流伺服电机调速驱动单元 结构实例
直流伺服电机调速驱动单元 结构实例
速度指令
电机 测速电机
直流伺服电机调速驱动单元 结构实例
速度单元
速度指令
电机 测速电机
第三章可逆直流调速系统ppt课件(全)
2.励磁反接可逆线路
改变励磁电流的方向也能使直流电动机反转。因 此又有励磁反接可逆线路,如图3―3 所示。这时电动 机电枢只要用一组晶闸管装置供电并调速,如图3-3 (a)所示,而励磁绕组则由另外的两组晶闸管装置 反并联供电,象电枢反接可逆线路一样,可以采用反 并联或交叉连接中的任意一种方案来改变其励磁电流 的方向。图3―3(b)中只画了两组晶闸管装置反并 联提供励磁电流的方案,其工作原理读者可以自行分 析。
第三章 可逆直流调速系统
内容提要 1、V-M调速系统的可逆运行方案; 2、有环流可逆系统; 3、无环流可逆系统; 4、直流脉宽调制调速系统
在前面两章讨论的各种晶闸管直流调速系 统,由于晶闸管的单向导电性,只用一组晶闸 管变流器对电动机供电的调速系统只能获得单 方向的运行,是不可逆调速系统。这类系统只 适用于不要求经常改变电动机转向,同时对制 动的快速性无特殊要求的生产机械。但是在生 产实际中,有一定数量的生产机械对拖动系统 中的电动机要求是,既能正转,又能反转,且 在减速和停车时还要求产生制动转矩,以缩短 制动时间,这就出现了可逆直流调速系统。
环流可以分为两大类:
❖(1)静态环流 当晶闸管装置在一定的控制角 下稳定工作时,可逆线路中出现的单方向流动 的环流叫静态环流。静态环流又可分为直流环 流和脉动环流。
❖(2)动态环流 系统稳态运行时并不存在,只 在系统处于过渡过程中出现的环流,叫作动态 环流。
因篇幅有限,这里只对系统影响较大的静 态环流作定性分析。下面以反并联线路为例来 分析静态环流。
2.晶闸管装置的两种工作状态
晶闸管装置也有两种工作状态,一种是整 流状态,另一种是逆变状态。下面结合一个具 体实例说明如下:
由一组晶闸管组成的全控整流电路中,电 动机带的是位势性负载,如图3―4所示。当控 制角α<900时,晶闸管装置直流侧输出的理想 空载电压Ud0为正,且Ud0>E,所以能输出整流 电 如流图I3d―,4使(电a)动所机示产。生这电时动电转能矩从而交将流重电物网提经升, 晶闸管装置输送给电动机,晶闸管装置处于整 流状态。
第四章VM可逆调速系统ppt课件

n 两组晶闸管装置反并联可逆供电方式
a) 电路结构
VF +
Id
-M-
-
- VR
-Id
+
b) 运行范围 n
正向
O
-Id
Id
反向
-n
图4-2 两组晶闸管可控整流装置反并联可逆线路
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
2. 单组晶闸管装置的有源逆变
单组晶闸管装置供电的V-M系统在拖动起重机 类型的负载时也可能出现整流和有源逆变状态。
a)整流状态:提升重物, 90°,Ud0 E,n 0
二. 晶闸管-电动机系统的回馈制动
1. 晶闸管装置的整流和逆变状态
在两组晶闸管反并联线路的V-M系统中, 晶闸管装置可以工作在整流或有源逆变 状态。
在电流连续的条件下,晶闸管装置的平 均理想空载输出电压为
U d0 m πU m s
iπ nc m
os U d0m c
a ox(s4-1)
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
系统组成(续)
UPW—PWM波生成环节,其算法包含在单 片微机软件中;
TG—为测速发电机,当调速精度要求较高 时可采用数字测速码盘;
TA—霍尔电流传感器; 给定量 n*,I*d 和反馈量 n,Id 都已经是数
字量。
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
可逆控制和弱磁控制的直流调速系统PPT课件
VD3
A
+
-
MM
B
VD2
VD4
PWM变换器 的直流电源
VT3 Ug3
VT4
Ug4
整流器
AC~ ///
滤波;当电动机制动时吸收 运行系统动能的作用。
+
斩波器
Us + CCC
DC
-
PWM变换器的直流电源Us通常由交流 电网经不可控的二极管整流器产生,把电 网提供的交流电整流成直流电;并采用大 电容C滤波,以获得恒定的直流电压。
Ug
VT
+
O
t
Ug
Ud id + M _
E
C
U_ s
PWM变换器
的直流电源
VD
a)主电路原理图
图2-11 有制动电流通路的不可逆PWM变换器
VT2 Ug2
VT1
VD2
Ud
﹣M+ E
Ug1
VD1
PWM变换器 的直流电源
C
Us +
图4-2 桥式可逆PWM变换器
VT1 Ug1
VT2 Ug2
+Us
VD1
泵升电压产生的原因及泵升电压
当脉宽调速系统的
整流器 +
斩波器
电动机减速或停车时, 储存在电动机中和负载
AC~ ///
Us + CCC
DC
转动部分的动能将变成 电能,并通过PWM变换
器回馈给直流电流。由
于直流电源靠二极管整
-
流器供电,不可能回馈
电能,电机制动时只好
对滤波电容充电,这将
使电容两端电压升高,
U dtT oU nsT T toU ns(2 T ton 1 )U s==(γ2U–s 1)Us
直流调速第二章31页PPT
2 24
6
若 1Ts22 1 及 1Ts33 Ts ,则传递函数近似成一阶惯性环节
2
6
Ud(s) Ks Uct(s) Tss 1
(2-35)
工程上,A1T s21,即 1 : 1
1、电流连续时的机械特性。
nC1e(Ud0cosRdId)
(1-25)
改变控制角 ,得一组平行直线, 该特性 和G--M系统相似。
2、电流断续时机械特性的定性分析
由于电流为零时,Ud=E,所以与电流连续时相比,相同 角, 相同Id时对应的平均输出电压Ud值变大了,致使机械特性变软, 理想空载转矩升高。
2、相位控制直流可逆系统的机械特性 有环流可逆系统的机械特性,由正、反两组变流器单独向电动机
供电时的机械特性合成。
以 60o为例分析
(1)特性画法
Id = I1 - I2
机械特性 n=f(Id)
(2)待逆变、待整流的概念 两组变流器均有触发脉冲,由哪一组供电呢?
(3)特性 a—b—c 分析 a点:可逆系统工作在电动状态;VF工作在电流连续区的整流
(4)有环流可逆系统的优、缺点 优点:在反组切换时,电流能平滑过渡,没有动态死区,能加快动 态过程。 少量环流流过晶闸管作为基本环流,使电机在空载或轻载时 也能工作在电流连续区,从而避免了电流断续引起的非线性 现象对系统静、动态性能的影响。 缺点:增加环流电抗器,损耗增大。 适用于要求反向快,过渡平滑性要求较高的中、小型系统。
当60o
n0 2U2phsin3(0o) 当60o Ce
由于单相电路
2 n0 U 2
Ce
3、结论:
n0 2 U2sin Ce
当90o时
当90o时
直流调速系统原理ppt课件
精选课件
11
1 转速负反馈晶闸管直流调速系统
给定
比较放大
晶闸管触 发整流
反馈电位器
他励直流电动机 测速发电机
精选课件
12
1.1 系统的组成
由图可见,该系统的控制对象是直流电动机M,被 控量是电动机的转速n,晶闸管触发及整流电路为功 率放大和执行环节,由运算放大器构成的比例调节器 为电压放大和电压(综合)比较环节,电位器RP1为给 定元件,测速发电机TG与电位器RP2为转速检测元 件。该调速系统的组成框图如下:
精选课件
25
电流截止负反馈的作用
可以通过一个电压比较环节,使电流负反馈环节只有 在电流超过某个允许值(称为阈值)时才起作用,这就 是电流截止负反馈。
精选课件
26
电流截止负反馈环节的组成工作原理
n
额定电流时
堵转电流时 理想特性
堵转电流 时的实际 特性
挖土机特性
Id
当Id较小,即IdRc≤Uo时,则二极管VD截止,电流截止负 反馈不起作用。 当Id较大,即IdRc≥U0时,则二极管VD导通,电流截止 负反馈起作用,ΔU减小,Ud下降,Id下降到允许最电流。
触发 电路
电源及晶闸管电路
电 动 机
比较环节+比例调节器
测速电机
精选课件
电流 载止 比较 电路
20
比较放大电路(Amplifier)
由叠加定理:当Us(s)单独作用 时,有:
U U 'sk((ss))R R1 2 Uk' R R1 2Us(s)
当Ufn(s)单独作用时,有:
U U "kf(n(ss))R R1 2 Uk "R R1 2[Ufn(s)]
第4章_第2讲V-M可逆直流调速系统

(2)动态环流——仅在可逆V-M系统处于过渡过程中出现的环 流。
这里,主要分析静态环流的形成原因,并讨论其控制方法和抑 制措施。
(二). 直流平均环流与配合控制
在两组晶闸管反并联的可逆V-M系统中,如果让正组 VF 和反组VR都处于整流状态,两组的直流平均电压正 负相连,必然产生较大的直流平均环流。为了防止直流 平均环流的产生,需要采取必要的措施,比如:
Ud0f Id
--
M
Ic — 环流 Id — 负载电流
图4-10 反并联可逆V-M系统中的环流
环流的危害和利用
危害:一般地说,这样的环流对负载无益,徒 然加重晶闸管和变压器的负担,消耗功率,环 流太大时会导致晶闸管损坏,因此应该予以抑 制或消除。 利用:只要合理的对环流进行控制,保证晶闸 管的安全工作,可以利用环流作为流过晶闸管 的基本负载电流,使电动机在空载或轻载时可 工作在晶闸管装置的电流连续区,以避免电流 断续引起的非线性对系统性能的影响。
优点: • KMR闭合,电动机反转。 仅需一 组晶闸 管装置, 简单、 V + KMF +I 经济。 d
• KMF闭合,电动机正转;
KMR
~
U Udd KMR
M
– Id
KMF
缺点:有触点切换,开 关寿命短;需自由停车 后才能反向,时间长。
②
晶闸管开关切换的可逆线路
适用于中、 小功率的 可逆系统
• VT1、VT4导通,电动机正转;
但是,不允许让两组晶闸管同时处于整流状 态,否则将造成电源短路,因此对控制电路提 出了严格的要求。
(2). 励磁反接可逆线路
改变励磁电流的方向也能使电动机改变转 向。与电枢反接可逆线路一样,可以采用接触 器开关或晶闸管开关切换方式,也可采用两组 晶闸管反并联供电方式来改变励磁方向。 励磁反接可逆线路见下图,电动机电枢用 一组晶闸管装置供电,励磁绕组由另外的两组 晶闸管装置供电。
第4章_第2讲V-M可逆直流调速系统
fmin
Uc
(5)最小逆变角限制 为了防止晶闸管装置在逆变状态工作中逆 变角太小而导致换流失败,出现“逆变颠覆” 现象,必须在控制电路中采用限幅作用,形成
最小逆变角min保护。与此同时,对 角也实
施 min 保护,以免出现 Ud0f > Ud0r 而产生直流 平均环流。通常取
(a)正组整流Βιβλιοθήκη 动运行(b)反组逆变制动运行
(3). 两组晶闸管装置反并联的整流和逆变
n
整流状态: V-M系统工作在第一 象限。 逆变状态: V-M系统工作在第二 象限。
-Id
反组逆变 回馈制动
正组整流 电动运动
Id
c) 机械特性运行范围
(4). V-M系统的四象限运行
在可逆调速系统中,正转运行时可利用反 组晶闸管实现回馈制动,反转运行时同样可 以利用正组晶闸管实现回馈制动。这样,采 用两组晶闸管装置的反并联,就可实现电动 机的四象限运行。 归纳起来,可将可逆线路正反转时晶闸管 装置和电机的工作状态列于表4-1中。
Ud0 = -Ud0 max cos
(4-2)
(2). 单组晶闸管装置的有源逆变
单组晶闸管装置供电的V-M系统在拖动起重机类型的负 载时也可能出现整流和有源逆变状态。 R
+ a)整流状态:提升重物, 90°,Ud0 E,n 0 V + n P 由电网向电动机提供能量。 E -Ud0 M b)逆变状态:放下重物 90°,Ud0 E,n 0 Id 由电动机向电网回馈能量。 α>90°,Ud0为负,晶闸管装置本身不能输 出电流,电机不能产生转矩提升重物,只有靠 重物本身的重量下降,迫使电机反转,产生反 R 向的电动势-E。 V 当|E|>|Ud0|时,产生Id,因而产生与提升重 P 物同方向的转矩,起制动作用,使重物平稳下 -Ud0 E M -降。 n + + 电动机处于反转制动状态,成为受重物拖动的 发电机,将重物的位能转化成电能,通过晶闸 管装置V回馈给电网,V则工作于有源逆变状态, V-M系统运行于第Ⅳ象限。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直流 交流
10
③两组晶闸管装置的可逆运行模式:
正组VF整流—正向电动运行(I) 反组VR逆变—正向回馈制动(II) 反组VR整流—反向电动运行(III) 正组VF逆变—反向回馈制动(IV)
可根据电动机所需运转状态来决定哪一组变 流器工作及其工作状态:整流或逆变
11
V-M系统反并联可逆线路的工作状态
Rrec
VF
+
Ra
- VR
~
Ud0f
-M-
Ud0r
~
Id -
Ic
+
Ic — 环流 Id — 负载电流
不流过负载而直接在两组晶闸管之间流
通的短路电流,称作环流。
14
2)环流的危害
– 危害:环流对负载无益,加重 晶闸管和变压器的负担,消耗 功率,环流太大时会导致晶闸 管损坏,应该予以抑制或消除。
15
3)环流的分类
在三相桥式反并联可逆线路中,由于每一组桥 又有两条并联的环流通道,总共要设置4个环流电 抗器。
VF
VR
1
a
A
~B
b
C
c
-M-
2
25
3、 = 配合控制的有环流可逆V-M系统
(1) 系统组成
+ KF
U*n
U*i +
ASR
Uc GTF
第4章
可逆调速系统 位置随动系统 (自学)
1
可逆直流调速系统
内容提要 • 问题的提出 • 晶闸管-电动机系统的可逆线路 • 晶闸管-电动机系统的回馈制动(重点理解) • 两组晶闸管可逆线路中的环流(注重概念) • 有环流可逆调速系统(重点内容) • 无环流可逆调速系统
2
问题的提出
• 生产机械要求电动机能正转、反转。 • 要求快速地起动和制动,电力拖动系统
– 电枢反接可逆线路; – 励磁反接可逆线路(较少应用)。 7
电枢反接可逆线路
电枢反接可逆线路主要有如下3种形式: (1)接触器切换的可逆线路(断续控制系
统) (2)晶闸管切换的可逆线路 (3)两组晶闸管装置反并联可逆线路(连
续控制系统)--------应用较多
8
两组晶闸管装置反并联可逆线路
a) 电路结构
具有四象限运行的特性,即需要可逆的 调速系统。
3
• 电力电子器件的单向导电性,需要专用的 可逆电力电子装置。
• 常用的可逆电力电子装置: ①PWM可逆直流调速系统 ②晶闸管-电动机可逆直流调速系统
4
4、1单片微机控制的PWM可逆直流 调速系统
中、小功率的可逆直流调速系统多采用 桥式可逆PWM变换器。
f r 配合工作的实现
控制电压为零时,使整流角和逆变角都等于 90度。电机处于停止状态。
增大控制电压Uc 移相时,只要使两组触发 装置的控制电压大小相等符号相反就可以了。
18
= 配合控制特性
一组晶闸管装置处于整流状态,另一组便处于逆变 状态
fmin
180o 0o
r
CTR
VF
M Ra
VR
20
Rrec
Rrec
= 配合控制特性
fmin
180o
0o
r
90o
90o
CTR
f CTF
rmin
rmin
0o
- Ucm - Uc1
180o
fmin
Uc1 Ucm
Uc
图4-7 配合控制移相特性
21
在 = 配合控制下, 在任何时候,实
际上只有一组晶闸管装置在工作,另一 组则处于等待工作的状态。
b) 运行范围n
VF +
Id
-M-
-
- VR
-Id
+
正向
O
-Id
Id
反向
-n
图4-2 两组晶闸管可控整流装置反并联可逆线路
9
1、可逆V-M系统的工作状态分析
①电动机的工作状态: • 电动运行状态 • 制动状态(发电状态)
②晶闸管整流装置的工作状态:
• 整流状态 控制角 90°交流 • 逆变状态 控制角 90°直流
V-M系统的工作状态 正向运行 正向制动
电枢端电压极性 电枢电流极性 电机旋转方向
电机运行状态 晶闸管工作的组别
和状态 机械特性所在象限
+ + +
电动
正组整流
一
+
-
+
回馈发电
反组逆变
二
反向运行
- - -
电动
反组整流
三
反向制动
-
+
-
回馈发电
正组逆变
四
12
正组
-T
正组
+n 正转逆变 Id
Id 正转整流
U dof -U dor
U dof U do max cos f
U dor U do max cos r
U U U dof max
dor max
do max
cos f cosr
f r 180
17
根据逆变角定义 实际工作
f r f r
+
EM M -
电能
+
+
电网 电网
电能
Ud - 反组
正组 - Ud
+ M EM
-
发电运行
电动运行
O 反转整流 Id
Id 反转逆变
EM M
+
-
-
电能
电网 电网
电能
Ud + 反组
正组 + Ud
M EM
+
电动运行 -n
发电运行
c)
反组 +T 反组
13
2、可逆V-M系统中的环流问题
1)环流的形成 Rrec
22
最小逆变角限制
min min 30
23
5) 瞬时脉动环流的抑制
抑制瞬时脉动环流,可在环流回路中串 入电抗器,叫做环流电抗器,或称均衡电 抗器,如图4-9a中的 Lc1和 Lc2 。
环流电抗的大小可以按照把瞬时环流的 直流分量限制在负载额定电流的5%~10% 来设计。
24
环流电抗器的设置
第1.3.4 节图1-22 绘出了 PWM 可逆调 速系统的主电路。
5
• 系统组成
图4-1 PWM可逆直流调速系统原理图
6
4 .1. 2 可逆晶闸管-电动机系统
• 较大功率的可逆直流调速系统多采 用晶闸管-电动机系统。
• 电机方向的改变是由于电磁转矩方
向的改变 Te CmId
• V-M系统的可逆线路有两种方式:
90o
90o
f
CTF
fmin
Uc1 Ucm
Uc
图4-7 配合控制移相特性
19
= 配合控制电路
GTF
Uc
反Uc 组触发装 置GTR由Uc 控制,
AR
GTR
AR--反号器 -1
图4-6 = 配合控制电路
正组触发装置 GTF由 Uc 直接 控制
静态环流
①直流平均环流:正组和反组都处于整流状 态时,主电流的短路环流。
②瞬时脉动环流:当整流电压瞬时值大于逆 变电压瞬时值时,产生瞬时电压差,从而 产生瞬时环流。
动态环流:仅在可逆V-M系统过渡过程中出现 的环流
主要分析静态环流的形成原因,并讨论其控 制方法和抑制措施
16
4)直流平均环流的消除
• 解决方法:让正组整流时,反组处于逆变状态。