MATLAB编程0-1规划问题
应用MATLAB工具箱求解规划问题
应用MATLAB 优化工具箱求解规划问题如今,规划类问题是常见的数学建模问题,离散系统的优化问题一般都可以通过规划模型来求解。
用MATLAB 求解规划问题,可以避免手工的烦琐计算,大大提高工作效率和结果的准确性。
MA TLAB 是一种应用于数学计算及计算结果可视化处理的面向对象的高性能计算机语言,它以矩阵和向量为基本数据单位,从而提高程序的向量化程度,提高计算效率,尤其适合于线性规划、整数规划、多元规划、二元规划类问题的算法编写,以及数据拟合、参数估计、插值等数据处理法。
利用MA TLAB 提供的强大的规划模型求解命令,可以简单快速地得到所要的结果。
本文主要对线性规划、非线性规划、整数规划、单目标约束规划以及多目标规划等规划问题在MATLAB 中的实现做比较详细的讲解.线性规划问题线性规划是一种优化方法,MA TLAB 优化工具箱中有现成函数linprog 对标准型LP 问题求解。
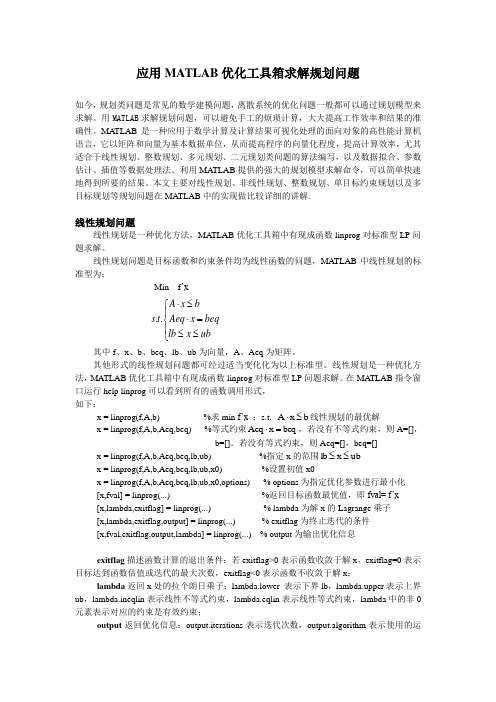
线性规划问题是目标函数和约束条件均为线性函数的问题,MATLAB 中线性规划的标准型为:Min f ’x..A x b s t Aeq x beq lb x ub ⋅≤⎧⎪⋅=⎨⎪≤≤⎩其中f 、x 、b 、beq 、lb 、ub 为向量,A 、Aeq 为矩阵。
其他形式的线性规划问题都可经过适当变化化为以上标准型。
线性规划是一种优化方法,MATLAB 优化工具箱中有现成函数linprog 对标准型LP 问题求解。
在MATLAB 指令窗口运行help linprog 可以看到所有的函数调用形式,如下:x = linprog(f,A,b) %求min f’x ;s.t. b x A ≤⋅线性规划的最优解x = linprog(f,A,b,Aeq,beq) %等式约束beq x Aeq =⋅,若没有不等式约束,则A=[],b=[]。
若没有等式约束,则Aeq=[],beq=[]x = linprog(f,A,b,Aeq,beq,lb,ub) %指定x 的范围ub x lb ≤≤x = linprog(f,A,b,Aeq,beq,lb,ub,x0) %设置初值x0x = linprog(f,A,b,Aeq,beq,lb,ub,x0,options) % options 为指定优化参数进行最小化[x,fval] = linprog(...) %返回目标函数最优值,即fval= f’x[x,lambda,exitflag] = linprog(...) % lambda 为解x 的Lagrange 乘子[x,lambda,exitflag,output] = linprog(...) % exitflag 为终止迭代的条件[x,fval,exitflag,output,lambda] = linprog(...) % output 为输出优化信息exitflag 描述函数计算的退出条件:若exitflag>0表示函数收敛于解x ,exitflag=0表示目标达到函数估值或迭代的最大次数,exitflag<0表示函数不收敛于解x ;lambda 返回x 处的拉个朗日乘子:lambda.lower 表示下界lb ,lambda.upper 表示上界ub ,lambda.ineqlin 表示线性不等式约束,lambda.eqlin 表示线性等式约束,lambda 中的非0元素表示对应的约束是有效约束;output 返回优化信息:output.iterations 表示迭代次数,output.algorithm 表示使用的运算规则,output.cgiterations 表示PCG 迭代次数。
matlab求解整数规划问题
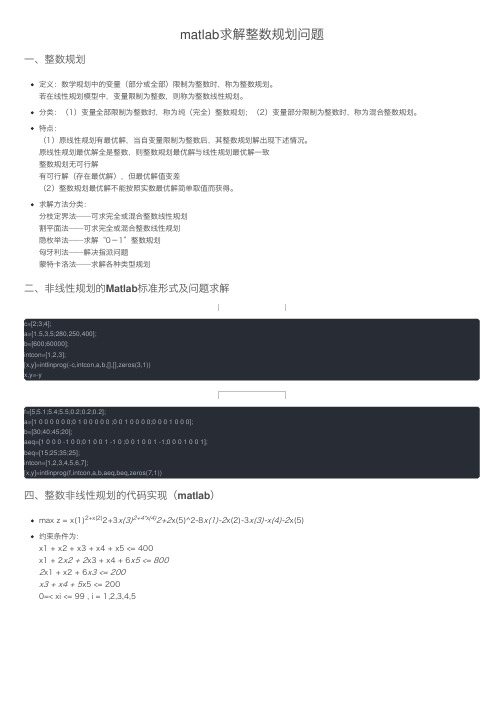
matlab求解整数规划问题⼀、整数规划定义:数学规划中的变量(部分或全部)限制为整数时,称为整数规划。
若在线性规划模型中,变量限制为整数,则称为整数线性规划。
分类:(1)变量全部限制为整数时,称为纯(完全)整数规划;(2)变量部分限制为整数时,称为混合整数规划。
特点:(1)原线性规划有最优解,当⾃变量限制为整数后,其整数规划解出现下述情况。
原线性规划最优解全是整数,则整数规划最优解与线性规划最优解⼀致整数规划⽆可⾏解有可⾏解(存在最优解),但最优解值变差(2)整数规划最优解不能按照实数最优解简单取值⽽获得。
求解⽅法分类:分枝定界法——可求完全或混合整数线性规划割平⾯法——可求完全或混合整数线性规划隐枚举法——求解“0-1”整数规划匈⽛利法——解决指派问题蒙特卡洛法——求解各种类型规划⼆、⾮线性规划的Matlab标准形式及问题求解c=[2;3;4];a=[1.5,3,5;280,250,400];b=[600;60000];intcon=[1,2,3];[x,y]=intlinprog(-c,intcon,a,b,[],[],zeros(3,1))x,y=-yf=[5;5.1;5.4;5.5;0.2;0.2;0.2];a=[1 0 0 0 0 0 0;0 1 0 0 0 0 0 ;0 0 1 0 0 0 0;0 0 0 1 0 0 0];b=[30;40;45;20];aeq=[1 0 0 0 -1 0 0;0 1 0 0 1 -1 0 ;0 0 1 0 0 1 -1;0 0 0 1 0 0 1];beq=[15;25;35;25];intcon=[1,2,3,4,5,6,7];[x,y]=intlinprog(f,intcon,a,b,aeq,beq,zeros(7,1))四、整数⾮线性规划的代码实现(matlab)2+x(2)2+4*x(4)max z = x(1)2+3x(3)2+2x(5)^2-8x(1)-2x(2)-3x(3)-x(4)-2x(5)约束条件为:x1 + x2 + x3 + x4 + x5 <= 400x1 + 2x2 + 2x3 + x4 + 6x5 <= 8002x1 + x2 + 6x3 <= 200x3 + x4 + 5x5 <= 2000=< xi <= 99 , i = 1,2,3,4,5function myfunx0 = [50 99 0 99 20];A = [1,1,1,1,1;1,2,2,1,6;2,1,6,0,0;0,0,1,1,5];b = [400,800,200,200];Aeq = [];beq = [];VLB = [0;0;0;0;0];VUB = [99;99;99;99;99];[x,fval] = fmincon(@fun,x0,A,b,Aeq,beq,VLB,VUB)endfunction ff = fun(x)ff = -(x(1)^2+x(2)^2+3*x(3)^2+4*x(4)^2+2*x(5)^2-8*x(1)-2*x(2)-3*x(3)-x(4)-2*x(5)); end五、蒙特卡罗法求解整数⾮线性规划2+x22+4*x4max z = x12+3x32+2x5^2-8x1-2x2-3x3-x4-2x5约束条件为:x1 + x2 + x3 + x4 + x5 <= 400x1 + 2x2 + 2x3 + x4 + 6x5 <= 8002x1 + x2 + 6x3 <= 200x3 + x4 + 5x5 <= 2000=< xi <= 99 , i = 1,2,3,4,5% 主函数rand('state',sum(clock));p0=0;ticfor i=1:100x1=randi([0,99],5,1);[f,g]=mengte(x1);if sum(g<=0)==4if p0<=fx0=x1;p0=f;endendendx0,p0tocfunction [f,g]=mengte(x);f=x(1)^2+x(2)^2+3*x(3)^2+4*x(4)^2+2*x(5)-8*x(1)-2*x(2)-3*x(3)...-x(4)-2*x(5);g(1)=sum(x)-400;g(2)=x(1)+2*x(2)+2*x(3)+x(4)+6*x(5)-800;g(3)=2*x(1)+x(2)+6*x(3)-200;g(4)=x(3)+x(4)+5*x(5)-200;end。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题线性规划是一种数学优化问题,通过线性函数的最大化或者最小化来实现目标函数的优化。
整数规划是线性规划的一种特殊情况,其中变量被限制为整数值。
在Matlab中,我们可以使用优化工具箱中的函数来求解线性规划和整数规划问题。
下面将详细介绍如何使用Matlab来求解这些问题。
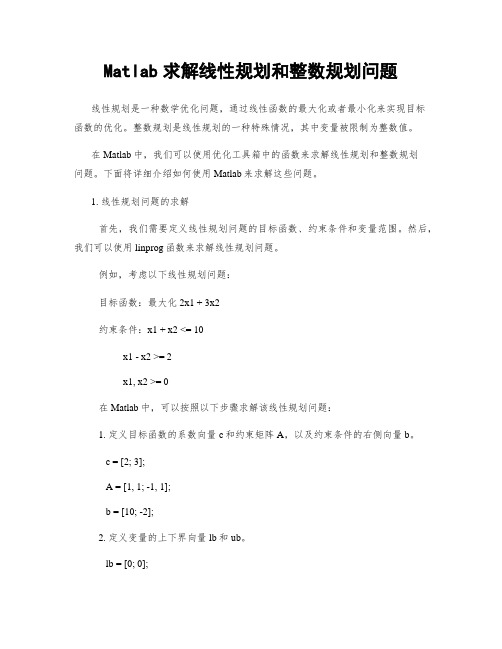
1. 线性规划问题的求解首先,我们需要定义线性规划问题的目标函数、约束条件和变量范围。
然后,我们可以使用linprog函数来求解线性规划问题。
例如,考虑以下线性规划问题:目标函数:最大化 2x1 + 3x2约束条件:x1 + x2 <= 10x1 - x2 >= 2x1, x2 >= 0在Matlab中,可以按照以下步骤求解该线性规划问题:1. 定义目标函数的系数向量c和约束矩阵A,以及约束条件的右侧向量b。
c = [2; 3];A = [1, 1; -1, 1];b = [10; -2];2. 定义变量的上下界向量lb和ub。
lb = [0; 0];ub = [];3. 使用linprog函数求解线性规划问题。
[x, fval] = linprog(-c, A, b, [], [], lb, ub);运行以上代码后,可以得到最优解x和目标函数的最优值fval。
2. 整数规划问题的求解对于整数规划问题,我们可以使用intlinprog函数来求解。
与线性规划问题类似,我们需要定义整数规划问题的目标函数、约束条件和变量范围。
然后,使用intlinprog函数求解整数规划问题。
例如,考虑以下整数规划问题:目标函数:最小化 3x1 + 4x2约束条件:2x1 + 5x2 >= 10x1, x2为非负整数在Matlab中,可以按照以下步骤求解该整数规划问题:1. 定义目标函数的系数向量f和约束矩阵A,以及约束条件的右侧向量b。
f = [3; 4];A = [-2, -5];b = [-10];2. 定义变量的整数约束向量intcon。
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题线性规划和整数规划是数学规划中常见的两种优化问题。
Matlab作为一种强大的数值计算软件,提供了丰富的工具和函数来解决这些问题。
本文将介绍如何使用Matlab求解线性规划和整数规划问题,并提供详细的步骤和示例代码。
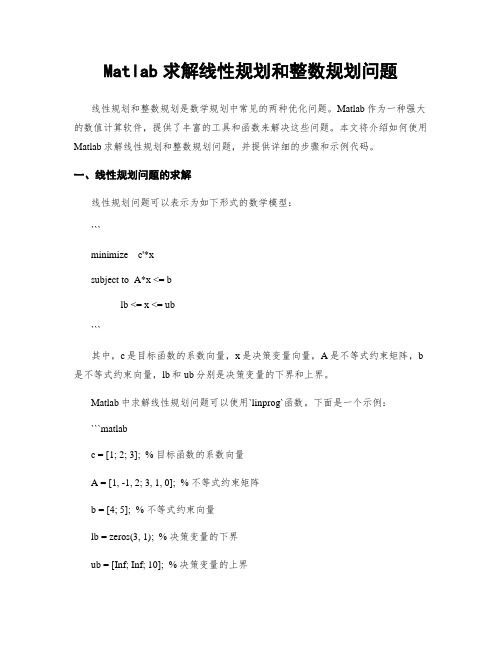
一、线性规划问题的求解线性规划问题可以表示为如下形式的数学模型:```minimize c'*xsubject to A*x <= blb <= x <= ub```其中,c是目标函数的系数向量,x是决策变量向量,A是不等式约束矩阵,b 是不等式约束向量,lb和ub分别是决策变量的下界和上界。
Matlab中求解线性规划问题可以使用`linprog`函数。
下面是一个示例:```matlabc = [1; 2; 3]; % 目标函数的系数向量A = [1, -1, 2; 3, 1, 0]; % 不等式约束矩阵b = [4; 5]; % 不等式约束向量lb = zeros(3, 1); % 决策变量的下界ub = [Inf; Inf; 10]; % 决策变量的上界[x, fval] = linprog(c, A, b, [], [], lb, ub);```在上面的示例中,我们定义了目标函数的系数向量c,不等式约束矩阵A,不等式约束向量b,以及决策变量的下界lb和上界ub。
然后使用`linprog`函数求解线性规划问题,得到最优解x和最优目标函数值fval。
二、整数规划问题的求解整数规划问题是线性规划问题的一个扩展,要求决策变量取整数值。
Matlab中求解整数规划问题可以使用`intlinprog`函数。
下面是一个示例:```matlabc = [1; 2; 3]; % 目标函数的系数向量A = [1, -1, 2; 3, 1, 0]; % 不等式约束矩阵b = [4; 5]; % 不等式约束向量lb = zeros(3, 1); % 决策变量的下界ub = [Inf; Inf; 10]; % 决策变量的上界intcon = [1; 2]; % 决策变量的整数约束[x, fval] = intlinprog(c, intcon, A, b, [], [], lb, ub);```在上面的示例中,我们除了定义了线性规划问题的参数外,还定义了决策变量的整数约束intcon。
Matlab数学规划问题求解

Matlab数学规划问题求解1. 线性规划线性规划问题是目标函数和约束条件均为线性函数的问题,MATLAB6.0解决的线性规划问题的标准形式为:min n R',f∈xxsub.to:b⋅xA≤A e q=⋅xb e q≤lb≤xub其中f、x、b、beq、lb、ub为向量,A、Aeq为矩阵。
其它形式的线性规划问题都可经过适当变换化为此标准形式。
在MATLAB6.0版中,线性规划问题(Linear Programming)已用函数linprog取代了MATLAB5.x版中的lp函数。
当然,由于版本的向下兼容性,一般说来,低版本中的函数在6.0版中仍可使用。
函数linprog调用格式:x=linprog(f,A,b)x=linprog(f,A,b,Aeq,beq)x=linprog(f,A,b,Aeq,beq,lb,ub)x=linprog(f,A,b,Aeq,beq,lb,ub,x0)x=linprog(f,A,b,Aeq,beq,lb,ub,x0,options)[x,fval]=linprog(…)[x, fval, exitflag]=linprog(…)[x, fval, exitflag, output]=linprog(…)[x, fval, exitflag, output, lambda]=linprog(…)说明:x=linprog(f, A, b)%求min f ' *x, sub.to bA≤⋅线性规划的最优解。
返回x值x为最优解向量。
x=linprog(f, A, b, Aeq, beq) %含有等式约束beq⋅,若没有不等式xAeq=约束b⋅,则令A=[ ],b=[ ]。
A≤xx = linprog(f, A, b, Aeq, beq, lb, ub) %指定x的范围ub≤xlb≤x=linprog(f, A, b, Aeq, beq, lb, ub, x0) %设置x0为初值点。
第2章 0-1规划
用自编函数itgm: [r1,r2,ex1,ex2]=itgm(g,a,b,aq,bq) 定出决策变量x1,x2,x3的取值范围: x1:0~3 x2:0~2 x3:0~2
下面用枚举法求解:
k=1; for x1=0:3 for x2=0:2 for x3=0:2 q=[x1 x2 x3]';p=a*q; if p<=b z(k)=f*q; v(k,:)=q'; k=k+1; end end end end [zm,mi]=max(z); x=v(mi,:); zv=[z',v];
解得: ex =1 fv =53
x= 0 1 0 1 0 0 0 0 1
则当x1=0,x2=1,x3=0,x4=1,x5=0, x6=0,x7=0,x8=0,x9=1时,目标函数取 得最小值53。
例2-4 新产品研制,某工厂计划试制4种新产品A1、A2、 A3、A4。现有科研经费40万元,科技人员60名。各新产 品的试制费用、所需科技人员及预期的年利润如表2-1所 示。如果研制产品A2必须先研制产品A1,但产品A1的研 制与产品A2无关。另外该厂想至少研制其中的两种新产 品。问决策者应如何决定研制计划,使该厂获得利润最 大?
表2-6
货物编号i
1
2
3
单位重量(t)
3
4
5
单位价值ci
4
5
6
解:设第i种货物装载件的数量为xi(i=1,2,3),则所述 问题可表为:
max z 4x1 5x2 6x3
s.t.
3x1 4x2 5x3 10
xi
0, xi为整数(i=1,2,3)
f=[4,5,6]; a=[3,4,5]; b=10;
线性规划中Matlab的运用
§1 线性规划在人们的生产实践中,经常会遇到如何利用现有资源来安排生产,以取得最大经济效益的问题。
此类问题构成了运筹学的一个重要分支—数学规划,而线性规划(Linear Programming 简记LP)则是数学规划的一个重要分支。
自从1947年G. B. Dantzig 提出求解线性规划的单纯形方法以来,线性规划在理论上趋向成熟,在实用中日益广泛与深入。
特别是在计算机能处理成千上万个约束条件和决策变量的线性规划问题之后,线性规划的适用领域更为广泛了,已成为现代管理中经常采用的基本方法之一。
1.1 线性规划的实例与定义 例1 某机床厂生产甲、乙两种机床,每台销售后的利润分别为4000元与3000元。
生产甲机床需用B A 、机器加工,加工时间分别为每台2小时和1小时;生产乙机床需用C B A 、、三种机器加工,加工时间为每台各一小时。
若每天可用于加工的机器时数分别为A 机器10小时、B 机器8小时和C 机器7小时,问该厂应生产甲、乙机床各几台,才能使总利润最大?上述问题的数学模型:设该厂生产1x 台甲机床和2x 乙机床时总利润最大,则21,x x 应满足(目标函数)2134m ax x x z += (1)s.t.(约束条件)⎪⎪⎩⎪⎪⎨⎧≥≤≤+≤+0,781022122121x x x x x x x (2)这里变量21,x x 称之为决策变量,(1)式被称为问题的目标函数,(2)中的几个不等式是问题的约束条件,记为s.t.(即subject to)。
上述即为一规划问题数学模型的三个要素。
由于上面的目标函数及约束条件均为线性函数,故被称为线性规划问题。
总之,线性规划问题是在一组线性约束条件的限制下,求一线性目标函数最大或最小的问题。
在解决实际问题时,把问题归结成一个线性规划数学模型是很重要的一步,但往往也是困难的一步,模型建立得是否恰当,直接影响到求解。
而选取适当的决策变量,是我们建立有效模型的关键之一。
matlab解决整数规划问题(蒙特卡洛法)
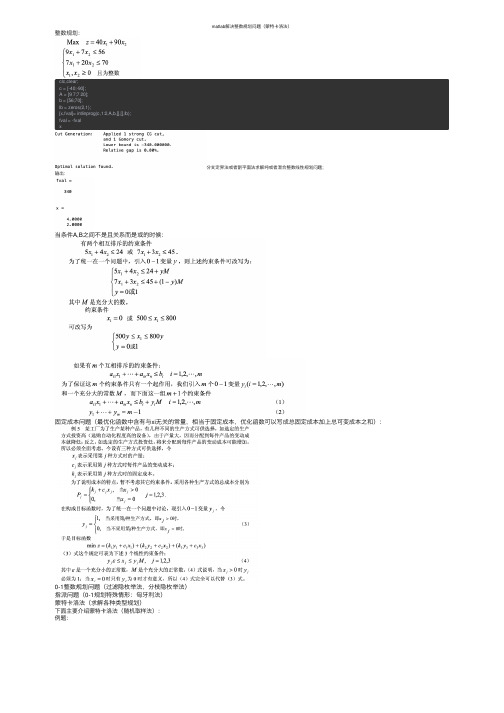
matlab解决整数规划问题(蒙特卡洛法)整数规划:clc,clear;c = [-40;-90];A = [9 7;7 20];b = [56;70];lb = zeros(2,1);[x,fval]= intlinprog(c,1:2,A,b,[],[],lb);fval = -fvalx分⽀定界法或者割平⾯法求解纯或者混合整数线性规划问题;输出:当条件A,B之间不是且关系⽽是或的时候:固定成本问题(最优化函数中含有与xi⽆关的常量,相当于固定成本,优化函数可以写成总固定成本加上总可变成本之和):0-1整数规划问题(过滤隐枚举法,分枝隐枚举法)指派问题(0-1规划特殊情形:匈⽛利法)蒙特卡洛法(求解各种类型规划)下⾯主要介绍蒙特卡洛法(随机取样法):例题:如果⽤显枚举法试探,需要计算1010个点,计算量巨⼤。
但是⽤蒙特卡洛去计算106个点便可以找到满意解。
前提:整数规划的最优点不是孤⽴的奇点;⽽采集106个点后,我们有很⼤把握最优值点在106个点之中;function [f,g] = mengte(x);f = x(1)^2+x(2)^2+3*x(3)^2+4*x(4)^2+2*x(5)-8*x(1)-2*x(2)-3*x(3)-...x(4)-2*x(5);g = [sum(x)-400x(1)+2*x(2)+2*x(3)+x(4)+6*x(5)-8002*x(1)+x(2)+6*x(3)-200x(3)+x(4)+5*x(5)-200];rand('state',sum(clock));p0 = 0;ticfor i = 1:10^6x = 99*rand(5,1);x1 = floor(x);x2 = ceil(x);[f,g] = mengte(x1);if sum(g<=0)==4if p0<=fx0 = x1;p0=f;endend[f,g] = mengte(x2);if sum(g<=0)==4if p0 <= fx0 = x2;p0 = f;endendendx0,p0toc输出:蒙特卡洛法得到的解为最优解的近似解,10^6个数据已经⽤了将近7s的时间,所以如果增加⼗倍,可能得70s时间才能得到结果。
Matlab求解线性规划和整数规划问题

Matlab求解线性规划和整数规划问题Matlab是一种强大的数学计算工具,可以用于求解各种数学问题,包括线性规划和整数规划问题。
本文将详细介绍如何使用Matlab求解线性规划和整数规划问题,并提供相应的代码示例和结果分析。
一、线性规划问题的求解线性规划问题是一类常见的数学优化问题,其目标是在一组线性约束条件下,找到使目标函数最优化的变量值。
在Matlab中,可以使用线性规划函数“linprog”来求解线性规划问题。
下面以一个简单的线性规划问题为例进行说明。
假设有如下线性规划问题:目标函数:maximize 2x1 + 3x2约束条件:x1 + x2 ≤ 5x1 - x2 ≤ 2x1, x2 ≥ 0首先,我们需要定义目标函数的系数矩阵和约束条件的系数矩阵。
在Matlab 中,可以使用矩阵来表示这些系数。
可以按照以下方式定义:c = [-2; -3]; % 目标函数的系数矩阵A = [1 1; 1 -1]; % 约束条件的系数矩阵b = [5; 2]; % 约束条件的右侧常数然后,我们可以使用“linprog”函数来求解线性规划问题。
代码如下:x = linprog(c, A, b); % 求解线性规划问题最后,我们可以输出求解结果,并进行结果分析。
代码如下:disp('最优解为:')disp(x)disp('目标函数的最优值为:')disp(-c'*x)运行以上代码,即可得到线性规划问题的最优解和目标函数的最优值。
在这个例子中,最优解为x1=2,x2=3,目标函数的最优值为-13。
二、整数规划问题的求解整数规划问题是线性规划问题的一种扩展,其变量需要取整数值。
在Matlab 中,可以使用整数规划函数“intlinprog”来求解整数规划问题。
下面以一个简单的整数规划问题为例进行说明。
假设有如下整数规划问题:目标函数:minimize 2x1 + 3x2约束条件:x1 + x2 ≥ 5x1 - x2 ≤ 2x1, x2 ≥ 0x1, x2为整数首先,我们需要定义目标函数的系数矩阵和约束条件的系数矩阵。
0-1整数规划
min s.t.
2018/12/6
f c' x Ax (或 , 或 )b x j 0 ( j 1,2,, n) xj ( j 1,2, , n) 取整数
12.2 整数线性规划MATLAB程序
整数线性规划问题的标准形式为:
min z f x s.t. Gx h G x h eq eq lb x ub ( x的某些分量取整数)
2018/12/6
Yalmip工具箱应用举例
目标函数:max z=4x1+6x2+2x3 s.t. -x1+3x2<=8 -x2+3x3<=10 5x1-x3<=8 x1、x2、x3>=0,x1、x2、x3为整数 具体代码如下: x=intvar(1,3); f=[4 6 2]*x’; F=set(x>0)+set([-1 3 0]*x’<=8)+set([0 -1 3]*x’<=10)+set([5 0 1]*x’<=8); solvesdp(F,-f) double(f) double(x)
2018/12/6
12.3 0-1型整数线性规划
0-1型整数线性规划
min s.t.
f c' x Ax (或 , 或 )b x j 0 ( j 1,2,, n) xj ( j 1,2,, n) 取0或1
2018/12/6
12.4 0-1型线性规划Matlab命令
2018/12/6
求解
首先化为标准形式, 转换求max为求min –f= 3x1-2x2+5x3 c=[3,-2,5]; a=[1,2,-1;1,4,1;1,1,0;0,4,1];b=[2;4;3;6]; [x,fval]=bintprog(c,a,b); xmax=x,zmax=-fval
MATLAB杯论文——基于0-1规划的交巡警平台设置与调度模型讲解

承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): B我们的参赛报名号为(如果赛区设置报名号的话):所属学校(请填写完整的全名):参赛队员(打印并签名) :1.2.3.指导教师或指导教师组负责人(打印并签名):日期:2011 年9 月12日赛区评阅编号(由赛区组委会评阅前进行编号):编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录(可供赛区评阅时使用):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):基于0-1规划的交巡警平台设置与调度模型摘要本文研究的是交巡警平台的设置、管辖区域的划分以及发生重大突发事件时警务资源的调度问题。
问题一中,我们对城区A的交通网络和交巡警平台的设置进行了分析。
首先,通过Floyd算法,计算出20个平台与各节点间的最短路径,并以此划分管辖区域,使各节点被距离它最近的平台管辖。
尽管如此,仍有6个节点(28、29、38、39、61、92)距离平台超过3km,导致这些节点发生案件时相应平台的出警时间过长。
接下来,我们利用0-1规划模型,制定出了发生重大突发事件时交巡警平台警力的调度方案,并得出了最快完成全封锁的时间为8min。
最后,为使A区交巡警平台的设置更为合理,我们以各平台工作量的变异系数最小和最长出警时间最短为目标,再次建立0-1规划模型,设计出了新增平台的方案,即:①新增4个平台,分别位于节点28(或29)、61、39、91,此时,最长出警时间为2.71min,工作量变异系数为0.2004,是能在3min内快速出警且新增平台数最少的方案;②新增5个平台,分别位于节点28(或29)、61、39、91、67,此时,最长出警时间仍为2.71min,工作量变异系数下降为0.1526,是能在3min内快速出警且各平台工作量最均衡的方案。
MATLAB编程0-1规划问题

MATLAB 语言应用————最优化MATLAB 编程线性规划问题第二章0-1规划MATLAB 的0-1规划函数bintprog 是针对下述0-1规划:12min *.**[,,],01,1,2,n i z f xs t A x baeq x beqx x x x x or i n=≤==== (2.1) 解0-1规划(2.1)的0-1规划函数bintprog 表述为[x, fv, exitflag, output]= bintprog(f,A,b,aeq, beq) (2.2) 输入部分:f 为目标函数,实为目标函数的系数。
A 为(2.1)中的不等式约束矩阵b 为(2.1)中的不等式约束向量aeq 为(2.1)中的等式约束矩阵beq (2.1)中的等式约束向量输出部分:x 为最优解 fval 为最优值exitflag 为输出标志 exitflag=1,有最优解 exitflag=0,迭代次数超过设定次数exitflag==-2,约束区域不可行 exitflag=-3,问题无解output ,表明算法和迭代情况如果我们不需要了解迭代情况和存储情况,可将0-1规划函数bintprog 写成[x, fv, ex]= linprog(f,A,b,aeq, beq) (2.3) 在函数bintprog 中,输入或输出元素的符号可以变更,如(2.3)中ex 仍为输出标志,但元素的符号位置不能变更。
在输出部分,如有缺者,可用[]号代替。
函数bintprog 的使用要点与函数linprog 的使用要点相同。
函数是为求目标函数的最小值而设置的,如要求函数的最大值,可先求出()f -的最小值fv ,则fv -必为f 的最大值。
例一 用函数bintprog 求解下列0-1规划123451234212345max 2264.32552422501i=1,2,5i z x x x x x s t x x x x x x x x x x x =++--+-++≤+---≤=或()用MA TLAB 语言编程如下:f=-[1,2,2,-6],-4A=[3,2,-1,1,2;2,4,-2,-1,-2];b=[5,5];[x,fv,ex]=bintprog(f,A,b,[],[]);X,-fv求解如下ex=1,fv=-5, x=[1,1,1,0,0]例二 用函数bintprog 求解下列0-1规划123412341234124min 37.2164853501i=1,2,4i z x x x x s t x x x x x x x x x x x x =+-+-+-≥-++≥++≥=或()用MA TLAB 语言编程如下:f=[3,7,-1,1]A=[-2,1,-1,1;-1,1,-6,-4];A=[A;-5,-3,0,-1]b=-[1,8,5];[x,fv,ex]=bintprog(f,A,b,[],[]);求解如下ex=1,fv=-3, x=[1,0,1,,1]例三 用函数bintprog 求解下列0-1规划123456789123456789147258369min 151821192322261716.11111101,1,29i z x x x x x x x x x S t x x x x x x x x x x x x x x x x x x x i =++++++++++=++=++=++=++=++===或用MA TLAB 语言编程如下:f=[15,18,21,19,23,22,26,17,16];z2=zeros(1,2); z3=zeros(1,3);z6=zeros(1,6); o3=zeros(1,3);q=[o3,z6;z3,o3,z3;z6,o3];q=[q;1,z2, 1,z2, 1,z2];q=[q;0,1,z2,1,z2,1,0];q=[q;z2,1, z2,1, z2,1];bq=ones(6,1)[x,fv,ex]=bintprog(f,[],[],q,bq);求得Ex=1,fv=53, x=[0,1,0,1,0,0,0,0,1]。
Matlab求解线性规划和整数规划问题

Matlab求解线性规划和整数规划问题Matlab是一种强大的数学计算软件,可用于求解各种数学问题,包括线性规划和整数规划问题。
在本文中,我将详细介绍如何使用Matlab求解线性规划和整数规划问题。
线性规划是一种优化问题,目标是通过线性约束条件来最大化或者最小化一个线性目标函数。
整数规划是线性规划的一种扩展,要求变量的取值必须为整数。
在Matlab中,我们可以使用内置的优化工具箱来解决这些问题。
首先,我们需要定义线性规划或者整数规划问题的目标函数和约束条件。
假设我们要最大化一个线性目标函数,可以使用以下代码定义目标函数:```matlabf = [1; 2; 3]; % 目标函数的系数向量```这里,f是一个列向量,表示目标函数的系数。
在这个例子中,我们有三个变量,所以f是一个3x1的向量。
接下来,我们需要定义约束条件。
约束条件可以是等式约束或者不等式约束。
假设我们有以下等式约束条件:```matlabAeq = [1, 1, 1]; % 等式约束条件的系数矩阵beq = 10; % 等式约束条件的右侧常数向量```这里,Aeq是一个1x3的矩阵,表示等式约束条件的系数。
beq是一个标量,表示等式约束条件的右侧常数。
我们还可以定义不等式约束条件。
假设我们有以下不等式约束条件:```matlabA = [1, 0, 0; 0, 1, 0]; % 不等式约束条件的系数矩阵b = [5; 3]; % 不等式约束条件的右侧常数向量```这里,A是一个2x3的矩阵,表示不等式约束条件的系数。
b是一个2x1的向量,表示不等式约束条件的右侧常数。
现在,我们可以使用Matlab的优化工具箱中的函数来求解线性规划问题。
使用linprog函数可以求解线性规划问题,使用intlinprog函数可以求解整数规划问题。
```matlabx = linprog(f, A, b, Aeq, beq); % 求解线性规划问题``````matlabx = intlinprog(f, [1, 2, 3], A, b, Aeq, beq); % 求解整数规划问题```这里,x是一个列向量,表示最优解。
基于Matlab的0_1背包问题的动态规划方法求解

计算机技术与发展
CO M PU T ER TECHN OLO GY AN D DEV ELO PM EN T
Vo l. 16 N o. 4 Apr . 2006
基于 Matlab 的 0- 1 背包问题的动态规划方法求解
王 乐, 王世卿, 张静乐
( 郑州大学 信息工程学院, 河南 郑州 450052)
( 下转第 92 页 )
∋ 92 ∋
计算机技术与发展
第 16 卷
1) 持球队员决策。 对于持球队员来说 , 首先考虑的是把球控制在自己的 范围内 , 如果球被对方球员截到, 进攻就无从谈起。在对 手离球较近 ( 其威胁性也大 ) 的情况下, 持球队员优先执行 各种控球的策略, 对球进行彻底的控制。而在对手离球较 远( 其威胁性也小) 的情况下, 持球队员才可以考虑如何组 织进攻。组织进攻包括自己是否应该继续带球、 预测周边 的队友下一步的动作 ( 以便更好地传球) 及其传球的路线 选择等。持球队员的决策在一个完整的进攻中处于核心 地位( 可以直接影响球的位置和速度) , 同时可以对无球队 员决策进行方向性的指导。好的持球队员的决策决定了 进攻的成败。持球队员是进攻的发起者。 2) 无球队员决策。 对于无球队员来说 , 无须考虑控球的问题, 也暂时无 法影响球的位置和速度。无球队员的决策是以对持球队 员行为的预测为核心。无球队员根据预测出持球队员动 作( 带球或传球 ) 的情况 , 决定自己的行为。无球队员的行 为主要是跑位, 根据设定的有利进攻点来调整自身的方 向。同时无球队员应做好对方可能会断球、 球被断后进行 快速抢球及其完成从无球队员到持球队员转换的准备。 无球队员是进攻的响应者。 如图 1( a) 所示, 持球队员首先预测了队友的动作 ( 图 中虚线箭头所示) , 将球沿实线箭头传给队友 ; 同时如图 1 ( b) 所示, 无球队员首先预测了队友的动作 ( 传球) , 并预测 球的路线( 图中虚线箭头所示 ) , 同时决定沿实线箭头跑 位。比较同一情况下两名不同位置的球员的决策, 可以发 现虽然预测和实际的动作有出入, 但从总体上可以认为这 两个 agent 完成了配合 , 达到了想要的结果 ( 实现了非通 讯状态下的球员之间的合作 , 即球员之间产生了( 默契)) 。 实验表明, 这种以持球队员为核心的进攻策略简化了 agent 考虑的因素, 提高了传球的目的性, 加快了进攻的速
第五讲 二次规划与0-1规划

PDF P230
bintprog
Purpose Solve binary integer programming problems Solves binary integer programming problems of the form
f, b, and beq are vectors, A and Aeq are matrices, and the solution x is required to be a binary integer vector---that is, its entries can only take on the values 0 or 1.
problem
f Linear objective function vector f Aineq Matrix for linear inequality constraints bineq Vector for linear inequality constraints Aeq Matrix for linear equality constraints beq Vector for linear equality constraints x0 Initial point for x solver 'bintprog' options Options structure created with optimset
Options
BranchStrategy Strategy the algorithm uses to select the branch variable in the search tree — see “Branching” on page 4-108. The choices are • 'mininfeas'—Choose the variable with the minimum integer infeasibility, that is, the variable whose value is closest to 0 or 1 but not equal to 0 or 1. • 'maxinfeas'—Choose the variable with the maximum integer infeasibility, that is, the variable whose value is closest to 0.5 (default).
Matlab求解线性规划和整数规划问题
Matlab求解线性规划和整数规划问题Matlab是一种强大的数学软件工具,可以用于求解各种数学问题,包括线性规划和整数规划问题。
在本文中,我们将详细介绍如何使用Matlab来求解这两类问题,并提供一些示例和数据来帮助您更好地理解。
一、线性规划问题的求解线性规划问题是指在一定的约束条件下,求解一个线性目标函数的最大值或最小值。
在Matlab中,可以使用线性规划工具箱来解决这类问题。
1. 定义线性规划问题首先,我们需要定义线性规划问题的目标函数和约束条件。
目标函数是我们希望最大化或最小化的线性表达式,约束条件是一组线性不等式或等式。
例如,我们考虑以下线性规划问题:```最大化目标函数:f(x) = 3x1 + 5x2约束条件:2x1 + x2 <= 10x1 + 3x2 <= 12x1, x2 >= 0```2. 求解线性规划问题在Matlab中,可以使用`linprog`函数来求解线性规划问题。
该函数的基本语法如下:[x, fval] = linprog(f, A, b, Aeq, beq, lb, ub)```其中,`f`是目标函数的系数矩阵,`A`和`b`是不等式约束条件的系数矩阵和常数向量,`Aeq`和`beq`是等式约束条件的系数矩阵和常数向量,`lb`和`ub`是变量的下界和上界。
对于上述线性规划问题,我们可以使用以下代码进行求解:```matlabf = [-3; -5];A = [-2, -1; -1, -3];b = [-10; -12];lb = [0; 0];[x, fval] = linprog(f, A, b, [], [], lb);```3. 解释结果求解得到的结果保存在变量`x`和`fval`中。
其中,`x`是最优解向量,`fval`是最优解对应的目标函数值。
对于上述线性规划问题,求解结果如下:```x = [2; 4]fval = -26这表示在满足约束条件的情况下,目标函数的最大值为-26,最优解为x1=2,x2=4。
第五讲 规划问题的matlab计算
但是,输入matlab计算时,应该输入成x1,x2,…,x25的 格式。本题有25个0-1变量且需要约束全部化为小于等 于形式。约束矩阵是20x25的矩阵(为什么?),应 该采用稀疏矩阵的输入方式。
>> clear >> c=[32 17 34 36 25 21 31 21 22 19 24 29 40 28 39 26 35 41 33 29 33 27 31 42 22]; >> A=zeor(20,25);
后者略优于前者bfgs是至今最好的拟牛顿法下面对两种算法作一个计算对比functionfgzuisu2xdfp拟牛顿法计算initialhesstypeidentity初始hesse矩阵用单位阵optionsoptimset?largescale??off??hessupdate??dfp??gradobj??on??maxfunevals?250?initialhesstype??identity??display??iter?
参数输入: Fun: x0: 目标函数,一般用M文件给出 优化的初始点
Options: 参数设置(后面说明)
函数输出:
X:最优点(或最后迭代值) Fval:最后迭代值的目标函数值 Exitflag:函数结束的信息 Oupput:函数基本信息,包括迭代次数,目标函数最 大计算次数,使用的算法名称,计算规模
x =
Ax b, s.t .Qx p , x 0
求解命令: x=linprog(c,A,b,Q,p)
若没有不等式,则令A=[ ],b=[ ]。
例2
例2 求解线性规划
min z 13 x1 9 x2 10 x3 11x4 12 x5 8 x6 ; x1 x4 400, x x 600, 5 2 x3 x6 500, s.t. 0.4 x1 1.1x2 x3 800, 0.5 x4 1.2 x5 1.3 x6 900, x16 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB 语言应用————最优化
MATLAB 编程线性规划问题
第二章0-1规划
MATLAB 的0-1规划函数bintprog 是针对下述0-1规划:
12min *.**[,,],01,1,2,n i
z
f x s t A x b
aeq x beq
x x x x x or i n L L ()解0-1规划()的0-1规划函数bintprog 表述为
[x, fv, exitflag, output]= bintprog(f,A,b,aeq, beq)
()输入部分:
f 为目标函数,实为目标函数的系数。
A 为()中的不等式约束矩阵
b 为()中的不等式约束向量
aeq 为()中的等式约束矩阵
beq ()中的等式约束向量
输出部分:
x 为最优解fval 为最优值
exitflag 为输出标志
exitflag=1,有最优解exitflag=0,迭代次数超过设定次数exitflag==-2,约束区域不可行
exitflag=-3,问题无解
output ,表明算法和迭代情况如果我们不需要了解迭代情况和存储情况,可将
0-1规划函数bintprog 写成[x, fv, ex]= linprog(f,A,b,aeq, beq) ()
在函数bintprog 中,输入或输出元素的符号可以变更,如()中
ex 仍为输出标志,但元素的符号位置不能变更。
在输出部分,如有缺者,可用
[]号代替。
函数bintprog 的使用要点与函数linprog 的使用要点相同。
函数是为求目标函数的最小值而设置的,
如要求函数的最大值,可先求出()f 的最小值fv ,则fv
必为f 的最大值。
例一用函数bintprog 求解下列0-1规划用MA TLAB 语言编程如下:
f=-[1,2,2,-6],-4
A=[3,2,-1,1,2;2,4,-2,-1,-2];
b=[5,5];
[x,fv,ex]=bintprog(f,A,b,[],[]);
X,-fv
求解如下
ex=1,fv=-5, x=[1,1,1,0,0]
例二用函数bintprog求解下列0-1规划用MA TLAB语言编程如下:
f=[3,7,-1,1]
A=[-2,1,-1,1;-1,1,-6,-4];
A=[A;-5,-3,0,-1]
b=-[1,8,5];
[x,fv,ex]=bintprog(f,A,b,[],[]);
求解如下ex=1,fv=-3, x=[1,0,1,,1]
例三用函数bintprog求解下列0-1规划用MA TLAB语言编程如下:
f=[15,18,21,19,23,22,26,17,16];
z2=zeros(1,2); z3=zeros(1,3);
z6=zeros(1,6); o3=zeros(1,3);
q=[o3,z6;z3,o3,z3;z6,o3];
q=[q;1,z2, 1,z2, 1,z2];
q=[q;0,1,z2,1,z2,1,0];
q=[q;z2,1, z2,1, z2,1];
bq=ones(6,1)
[x,fv,ex]=bintprog(f,[],[],q,bq);
求得
Ex=1,fv=53, x=[0,1,0,1,0,0,0,0,1]。