QSC控制板以及上位机软件说明书
伦茨变频器SMDbpqsc操作说明书

10.6 8.8
14.2 12.4 12.6 11.0 11.6 10.1 18.9 16.5 17.4 15.2 27 35 44 52 24 31 38 45 24 31 39 46 21 27 34 40 22 29 36 42 19.3 25 31 37
(48 Hz-0%...62Hz+0%) 18.1 15.8 16.1 14.0 14.8 12.9
!"# , !" 4 6 8kHz !"# , !" 10kHz !"#$% C90 ( !"# )
5
4
4.1 4.1.1 1AC ! !"#$
> 50
4 M4 2.4 Nm 21 Ib-in
b1
b2
c
smd402
a[mm] a1[mm] b[mm] b1[mm] b2[mm]
ESMD251X2SFA ESMD371X2SFA ESMD551X2SFA ESMD751X2SFA ESMD152X2SFA ESMD222X2SFA 114 114 105 105 146 146 128 128 17 17 93 84 146 128 17 93 84 146 128 17
ESMD371X2TXA ESMD751X2TXA ESMD112X2TXA ESMD152X2TXA ESMD222X2TXA ESMD302X2TXA ESMD402X2TXA ESMD552L2TXA ESMD752L2TXA ESMD113L2TXA ESMD153L2TXA ESMD371L4TXA ESMD751L4TXA ESMD112L4TXA ESMD152L4TXA ESMD222L4TXA ESMD302L4TXA ESMD402L4TXA ESMD552L4TXA ESMD752L4TXA ESMD113L4TXA ESMD153L4TXA ESMD183L4TXA ESMD223L4TXA
QSC24E(NANO)可编程控制舵机板使用说明

舵机板上位机软件使用说明参考QSC32E使用说明这里详解ARDUINO-NANO配合舵机板QSC24E-NANO来解码PS2并使用手柄按键的功能,以及ARDUINO对舵机板接口通讯说明。
此功能仅QSC24E-NANO可用此舵机板套件分别为3块PCB组成,最左边为24路带过载保护的舵机控制板,(专门处理多路舵机控制)。
中间为ARDUINO-NANO编程控制板,PRO-MINI 为编程控制主板(专门负责处理数据编程)使用,最右边为的串口调试板(可给舵机板调试也可给ARDUINO-NANO下载程序)。
此舵机板,他上面可直接插PS2手柄的接收器,其解码是通过ARDUINO-NANO 来完成的。
L1:舵机供电电源指示灯L2:通讯指示灯,随着主板接收外部信号L2跟着同步闪动L3:舵机板状态显示灯。
此舵机板带有电压检测功能,当VSS主板电压低于6.8V (默认为7.4V锂电池供电),或者舵机(+-)电压低于5.5V(默认为7.4V锂电池接入1.3V降压二极管),此时L3灭掉,并伴随喇叭报警。
提示电池电压不足用户需要给电池充电1.驱动的安装:插上CP2102串口设备的USB线,并安装驱动,驱动为ARDUINO-QSC24E(CP2102)驱动对应不同的操作系统选择不同的驱动文件安装,这里注意,如果驱动没有安装时候CP2102串口设备的红色指示灯不会亮,只有正确安装好驱动后,CP2102串口板上的红色指示灯才点亮。
CP2102串口设备使用6P线连接下面的舵机板,连线为BLK---BLK,GRN---GRN.即通过上位机软件Q-robot_Servo_Control调试机器人舵机CP2102串口设备使用6P线连接上面的ARDUINO编程板,连线为BLK---BLK,GRN---GRN.即通过编程软件软件arduino下载机器人主程序。
2.主板的供电VSS表示主板供电正极电压,供电电压为6.5V-12V。
默认为7.4V+表示舵机供电正极电压,供电电压为5.5V-8V。
QS1新软件用户手册
QS1 系列 用户手册
本说明书仅使用于软件版本为 20XX 以上版本的驱动器 如果软件版本为 10XX 的驱动器请不要使用本说明书
深圳众为兴技术股份有限公司
地址: 深圳市南山区艺园路田厦 IC 产业园 27-29 栋 5 楼 邮编:518052 电话:0755-26722719(20 线) 传真:0755-26722718 email:tech@
第三章 接 线 ...................................................................................................................................... 7
3.1 接线要求 .................................................................................................................................7 3.1.1 驱动器连接端子...........................................................................................................7 3.1.2 电线规格 ...................................................................................................................... 7
1.3.1 伺服驱动器的命名 ...................................................................................................... 1 1.3.2 伺服电机的命名规则 .................................................................................................. 2 1.4 伺服电机与伺服驱动器配套参照表......................................................................................2 1.5 伺服驱动器的技术规格..........................................................................................................2
QSC DCM 数字影院监控器 说明书

D C M数字影院监控器DCM-10 | DCM-10D | DCM-30 | DCM-30DQSC 数字影院监控器将信号处理和监控功能集成在一个单一的设备中。
DCM 设计与QSC 数字影院功放DCA 系列一起使用,简化影院音频系统连线和配置,优化扬声器表现。
DCM-10, DCM-10D, DCM-30 和 DCM-30D 满足3-5主银幕声道,配置包括两分频,三分频或四分频。
DCM 系统还兼容所有影院处理器格式,包括Dolby Digital Surround-EX 和 DTS-ES 。
数字信号处理DCM 系列数字信号处理器在优化扬声器性能方面胜过传统的模拟分频器。
可精确调整系统内每只扬声器的分频点频率,分频类型、斜率,参量均衡,极性以及增益。
数字延时调整增量为20微秒,可确保扬声器单元得到合适的听觉时间校正和平滑的频率响应,这对三分频和四分频系统尤为重要。
自动防故障装置还含有带备份电源的紧急旁路有源分频器。
连线更少,设置更快DCM 极大地简化了系统连线和设置,特别是有效地降低了安装时间和人员费用。
电影处理器通过一根标准DB-25电缆输入到DCM 。
音频信号及监控信号则通过一根QSC Dataport 数据线连接到DCA 功放。
因此淘汰了所有传统的卡侬和条形接线端子。
DCM 使用电脑配置软件程序,设置简单。
程序中包括扬声器数据文件,并列出了常用影院扬声器型号的默认参数。
可将常用配置保存在磁盘上,以便快速装载到其他DCM 设备上。
先进的监控功能DCM 除了能监控功放输入输出的音频信号,还具有QSC 独特的“负载故障”检测功能。
DCM 监控所有功放的输出,并通过LED “负载故障”指示灯显示扬声器和线路的开路、短路状态,用以确认功放的所有输出工作正常。
特性:¾ 通过USB端口实时控制软件 ¾ 可调整分频器的类型和斜率 ¾ 可配置两分频,三分频和四分频 ¾ D型号有AES/EBU和模拟输入 ¾ 用户自定义辅助输出信号 ¾ 集监控和分频功能于一体¾ 达到艺术级声音的数字信号处理(动态范围大) ¾ 系统设置时间短(特别适用于房间相似的多厅影院)¾连接简便,每台功放只需一根QSC数据线。
Qic系统服务手册
Qic系统服务手册海克斯康测量技术(青岛)有限公司QIC系统维护注意事项警告:!绝对禁止任何带电接插操作。
!对DSP卡进行Config时,一定要关掉控制柜电源。
注意:计算机,控制柜通电前,必须检查电源配置是否正确(220V/110V)。
系统要有良好的接地。
应避免用手直接接触DSP板的元件引脚。
系统各种板卡跳线开关位置选择要正确。
接插件插接良好并紧固。
气压阀及电磁阀工作阈值调整要符合测量机用户手册要求。
当软件出现不明确错误信息时,请按紧急停,然后恢复。
当要重新启动计算机时,要关掉伺服电源。
非正常退出EZ-DMIS时,一定要同时按“Ctrl-Alt-Del”三个键,检查内存中是否还有EZ-DMIS,EZDRV软件。
若有,必须清除,此过程可能需反复多次。
否则,可能导致机器飞车等严重后果。
概述QIC数控系统是三坐标测量机的专用数控系统,它以国际上先进的DSP控制卡为核心,具有丰富的控制功能和保护功能。
采用PID参数调节及速度,加速度前馈控制模式,采用成熟的PWM驱动控制方式,可以实现连续轨迹控制功能。
随机提供的运动控制软件是一个丰富且完善的图形调试及检测软件。
系统简介结构形式QIC数控系统采用模块式结构,DSP控制卡和I/O板直接插于计算机的总线扩展槽中;驱动系统,保护板,电源等安装在控制柜中。
光栅,测头等易受干扰的信号直接进入I/O板,减少了干扰环节;而驱动信号,行程终信号,操纵盒信号,各种保护信号等经保护板处理后再进入I/O板。
这样,不仅提高了系统的可靠性,而且结构紧凑,便于测试,维修。
控制卡QIC数控系统的控制卡以当代国际上先进的高速,高性能32位数字信号处理器(即DSP)为核心。
DSP为高集成度,高可靠性超大规模集成电路,具有较高的运算和控制功能,其内部存储了许多可供开发者选择使用的高级语言库函数,大大简化了控制软件的开发。
控制功能PID参数及速度,加速度前馈控制QIC数控系统采用图形显示状态下的软件调节法,对照图形显示进行PID参数及速度,加速度前馈控制的调节,明显地提高了测量机的控制和驱动性能,使调试工作标准化和规范化。
PLC上位机软件界面说明

本空冷岛自动冲洗系统上位机采用图形化设计,具有操作简单、直观的特点,电脑在开机后会自动启动软件并进入主界面,界面左上部为1号机组的6个冲洗面,右上部为2号机组的6个冲洗面,左下部位水泵、电动阀、传感器的状态及参数,右下部为系统管理和状态指示,界面如下图:
启动后主界面
2.登录界面
在进入主界面后,点击右下角的用户管理后,弹出用户登录界面,选择相应的用户进行登录,默认密码为1,可通过软键盘输入也可通过键盘输入,输入正确后自动登录并关闭窗口,密码错误重新输入即可。
如果未登录时不可进行相关的控制操作。
登录界面
点击右下角的系统帮助后,弹出系统帮助界面,点击弹出窗口右侧的按钮可进行相关的信息查看,点击关闭界面可关闭此窗口。
系统帮助界面
4.冲洗界面
用户登录成功后,鼠标在上侧的冲洗面框内任意位置点击,即可弹出相应面的冲洗控制界面,在弹出的窗口左侧为冲洗小车行走位置示意图,右侧上方为当前面的状态指示区,下方为操作区,点击相应的操作按钮即可进行相关的操作控制,每个面的分电动阀为就地箱自动控制,不需人为控制操作,冲洗界面如下图。
冲洗界面
5.主电动阀控制界面
主电动阀默认为开启状态,当需要关闭时,点击电动阀图标,即可弹出电动阀操作窗口,点击开启接口开启电动阀,水泵在停止状态时点击关闭按钮即可关闭电动阀,点击返回可关闭主电动阀控制窗口。
主电动阀控制界面
6.系统管控界面
系统管控为系统的控制箱电源控制,可进行远程箱和就地箱的电源控制,以及主电动阀的控制。
点击开启可开启相关设备,点击关闭即可关闭相关设备。
系统管控界。
QSC6010模块使用说明书
目录1 简介...................................................................................................................................... - 1 -1.1硬件参数 (1)1.2软件参数 (1)1.3环境参数 (1)1.4认证 (1)1.5应用范围 (1)1.6结构尺寸 (1)2 接口介绍.............................................................................................................................. -3 -2.1功能框图 (3)2.2模块接口 (4)2.3电源接口 (7)2.4天线接口 (7)2.5音频接口 (7)2.6数据接口 (7)2.7R-UIM接口 (8)2.8键盘接口 (8)2.9PCM接口 (8)2.10用户自定义接口 (8)2.11其他接口 (8)2.12软件接口 (8)3 技术参数............................................................................................................................ - 10 -3.1极限工作条件 (10)3.2推荐工作条件 (10)3.3逻辑电平特性 (10)3.4音频接口特性 (11)3.5PCM接口时序 (11)3.6可靠性参数 (12)4 机械尺寸............................................................................................................................ - 12 -4.1模块封装 (12)4.2包装 (13)4.3推荐焊盘 (13)4.4标识 (13)5 参考设计............................................................................................................................ - 14 -6 注意事项:........................................................................................................................ - 15 -1简介CDMA无线接入模块基于CDMA20001x网络(兼容IS-95A)提供语音、数据、短信等业务,可广泛应用于无线传输、固定台、无线公话、接入盒、远程监控、车载台、无线多媒体终端和无线个人终端等系统中。
上位机测试软件说明书
精品文档
YL0202 模块上位机测试软件说明书
般三种用途:
、读取卡号
1. 使用“一键读卡”按钮,便可收到回应命令读出卡号。
2. 自动读卡,默认情况下模块有一种自动读卡功能,即只要卡靠近模块就能收到回应的一键读卡命
令读出卡号。
自动读卡命令可以使用阅读机中蓝色按钮“打开”和“关闭” 此开关有掉电保存功能。
二、读写数据
卡片有64 块存储空间可以当作存储信息的存储器。
3. 使用“一键写块”命令可以将数据写入指定块号存储块中,写块使用密钥B,默认密钥
为FFFFFFFFFFFF。
4. 使用“一键读块”命令可以将信息从指定存储块中读出数据,读块使用密钥A,默认密钥
为FFFFFFFFFFFF。
三、电子钱包
卡片当电子钱包需要先办卡
1. 一键办卡:块号是指需要在哪个块办卡,数值是0即可,上面的密钥A和密钥B是新密
码,下面的密钥B是原密钥B就可以了。
单击一键办卡。
2. 一键充值:块号是办过卡的块号,数值是需要充值的金额,充值使用密钥B,充值成功
会显示余额。
3. 一键扣款:块号是办过卡的块号,数值是需要扣除的金额,扣款使用密钥A,扣款成功
会显示余额。
精品文档
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
(word完整版)Q-C使用说明书
Q2010-C控制器使用说明书一、设置使用方法:1、初始密码:出厂设置的编程密码为666882、进入编程状态:输入编程密码【66688】按【,#】此时红灯和黄灯亮,控制器进入编程状态。
进入编程状态后,如20秒内无操作将自动退出编程状态。
3、修改个人用户密码(无需在编程状态下)按【#】键“读相对应的卡”“【输入4位旧密码】【再输入4位新密码】”如操作正确,绿灯闪亮一次关闭,同时蜂鸣器长鸣一声。
注:缺省密码(1234)4、功能设置:必须在进入编程状态情况后设置才能生效,否则操作无效。
四、修改“编程密码”进入编程状态:按【1】【输入5位新密码】蜂鸣器短鸣一声,绿灯闪亮一次关闭,密码修改成功,按【0】退出编程状态。
五、修改或设置通用密码进入编程状态:按【2】输入(4位数通用密码)(如8888)蜂鸣器短鸣一声,绿灯闪亮一次消失,密码修改成功,按【0】退出编程状态六、设置用户卡片:①按卡号单张发卡:按【61】【#】“输入(前10位数字卡号或后8位数字卡号)【#】(可连续输入卡号按【#】键结束).注:前10位为ID卡上丝印的前段以0为首的10位数字,后8位为丝印在卡上后段带逗号的8位数字。
②按卡号批量发卡:按【62】【#】“输入(前10位数字卡号或后8位数字卡号)【#】,再输入要增加卡的张数(3位数)【#】”最多可一次连续发999张卡.发卡过程中控制器会发出嘀…嘀提示音,每一声响表示一张卡设置成功,全部设完蜂鸣器会发出嘀嘀两声响.(注:此项功能必须卡号为连号的卡片)。
③读卡发卡:按【63】【#】读要授权的卡,(可续读卡发卡)按【#】键结束。
④设置管理卡:按【64】【#】读要设置的卡片。
注意:新设置的管理卡将取代旧的管理卡,管理卡只有一张.管理卡是用来设置卡片或删除卡片用的。
⑤管理卡使用方式:a、读管理卡一次,则峰鸣器长鸣一声,按#键可以开锁。
b、连续读管理卡三次,立即移开管理卡,控制器长鸣三声则进入连续设置卡片状态。
QSC系列太阳能充电控制器使用说明书 V1.0023
太阳能电池板电缆的那一个挡板)来设置内部跳线,设置方法如下:
开启前端挡板之前, 请先将前端挡板 黑色防水头拧松, 然后将 4 个螺丝拧下即可松开前端挡板。
前端挡板松开后,将前端挡板面对操作者, 操作者会看到右下角有 4 个针式跳线器, 从左至右编号为
0,1 , 2 , 3 。下面对 4 个跳线器的配置列表说明:
方式 输出 直流 直流 启动 显示 电源 无线 化学
功率 电压 电压 电压
或
输出 充电 蓄电池
(W) 范围 范围
(V) 无线蓝牙
功能 标准
(V)
(V)
显示
电压(V)
QSC15LK~ QSC150LK
无
无无
QSC15LKA~ QSC150LKA
无
有无
QSC15LKI~ QSC150LKI
11
0
无
有有
QSC15LKD~ QSC150LKD
六、设置输出端连接的化学蓄电池标准电压
本控制器输出端默认连接 48V 的化学蓄电池, 如果用户是连接其他电压类型的化学蓄电池,需要对控制器
进行设置。
对于配有数码管显示器和键盘的充电控制器, 用户可以直接通过按键来设定化学蓄电池的标准电压,设置方
法见 七、b 节说明。
对于没有数码管显示器和键盘的充电控制器, 需要由当地经销商 或是 专业人员开启机箱前端挡板(即 接
(注 : “短路” 表示 使用跳线帽插在跳线针上, “开路” 表示 跳线针上没有跳线帽)
跳线器编号 跳线器针 0 跳线器针 1
跳线器针 2 跳线器针 3
备注
蓄电池标准电压 12V 24V 36V 48V 60V
开路 开路 开路 开路 开路
DGQ--C系列说明书
DGQ-C 系列软起动装置使用说明书
源触点。触点容量为 AC250/5A; ◆ 端子⑦为起动端子,在系统参数中“控制方式”选择“起停控制”时此端子 取用,需要起动时端子⑦与端子⑩公共端接通一下即可; ◆ 端子⑧为停止端子,在系统参数中“控制方式”选择“起停控制”时此端子 取用,起动器在起动或运行时端子⑧与端子⑩公共端接通一下软起动器停止工 作,回到系统等待状态,以上起停方式只适应于三线工作制; ◆ 端子⑨为点动端子,在系统参数中“控制方式”选择“点动控制”时此端子 取用,在需要起停时端子⑨与端子⑩公共端接通时软起动器开始起动至运行,断 开即停机,回到系统等待状态,以上起停方式只适应于二线工作制,而二种工作 制(控制方式)不可同时取用; 用法如下图
旁路运行中
Ia=XXXA
Ib=XXXA
Ic=XXXA
U0=XXXV
4.4 故障界面 有故障时自动显示故障界面,如下图:
软起动器故障
XX 故障:0X0000
Ia=XXXA
Ib=XXXA
Ic=XXXA
U0=XXXV
故障码“0X0000”为 2 字节 16 进制数,按位代表不同的故障。 “Ia”显示 A 相电流值,“Ib”显示 B 相电流值,“Ic”显示 C 相电流值,“U0”显示动力电 源电压。用此界面可标定三相电流值(***A/1A 电流互感器应有对应模拟量输入)
DGQ-C 系列智能软起动控制装置系统原理框图(见图一)。
-2-
(图一)
DGQ-C 系列软起动装置使用说明书
1.3 主要特点 ◆控制系统采用人性化的设计,具有友好的中文显示人机界面和多种组合控制 操作模式,显示清晰,操作简单,极大的方便了用户的使用; ◆采用哈佛总线及整体化设计,减少系统连线,DSP 芯片生产工艺采用 SMT 贴 片技术,整机出厂前进行了高温老化及振动实验,保证了可靠的产品质量; ◆具有多种起动方式,电压斜坡式起动方式可得到最佳的输出转矩;恒流起动 方式可限制最大起动电流,但起动时间稍长。具体方式可根据现场状况进行选择; ◆具有完善的保护功能:缺相、起动过流、运行过载、欠载、过热和起动时间 过长等十二项保护;并具有故障断电保存及字符提示功能,便于查找故障原因; ◆ 具有自由停车、软停车和刹车制动等多种停车方式可供选择。输入输出控 制点可根据需要现场编程,以满足不同场合下的使用需要; ◆起动电流倍数、起动时间、起始电压等参数可根据不同负载进行调整,以减 少起动损耗,达到最佳起动效果,平稳起动电机及拖动负载; ◆具有 RS-485 通讯功能及 0-20mA 标准模拟电流输出,系统与上位机可进行双 向通讯,以适应外围设备监控; ◆具有性能可靠,安装、操作、使用简便等特点。
IC电梯控制器软件使用说明书
第一步:控制器管理
此项为每个控制器信息的基本设置。
1.控制器密码设置:在控制器管理选项中选择控制器密码设置或点击快捷
Байду номын сангаас
图标
,出现如下界面,初始密码:1234。
设置好新密码后点击修改即可,新密码用户可自行设置,但是设置之后请勿 更改,此项设置主要作用于区别用此软件的不同园区间电梯的卡不能互用。
五、说明.........................................................................................................................................12
1
梯控、门禁、停车、一卡通专业研发
用 WINDOWSXP · CPU:奔腾 1.7Ghz 以上,建议赛扬 2.4 以上配置。 · 内存:256M 以上,建议使用 DDR256M 以上内存。 · 显示卡:Graphic2 64M 以上显示卡,1024*768 分辨率,85 赫兹。 · 硬盘:40GB 以上硬盘,安装所需 500M 剩余空间。 · 光盘驱动器:40 倍速 CD-ROM 以上。 · 打印机:适用于任何打印机,A4 打印纸。 · 其他设备:鼠标、键盘、声卡。
第二步:电梯管理卡设置.......................................................................................................5 1.时间管理卡设置............................................................................................................5 2.电梯设置卡设置............................................................................................................6
IPC系列控制软件手册说明书

IPC系列工业控制器说明本操作说明书内容可能有变更,恕不能事先通知。
若发现本操作说明书的内容有可疑、错误、漏记,敬请联系我们更改。
本操作说明书如有错页、缺页,我们会为您更换。
IPC系列控制器软件手册文档编号:MPD91070309发行者:佛山市奇创智能科技有限公司总部:广东省佛山市禅城区张槎一路115号华南电源创新科技园2座北塔5楼电话:*************变更记录版本变更信息变更人日期V1.0新版发布ydd,hyh2019-03目录第1章IPC和Codesys (1)1.1IPC概述 (1)1.2Codesys概述 (1)第2章配置Codesys编程环境 (3)2.1Codesys软件获取及安装要求 (3)2.2Codesys软件安装 (3)2.3安装设备描述文件 (5)2.4库文件 (7)2.4.1库概述 (7)2.4.2库的管理 (8)2.4.3库文件的调用 (8)2.5包获取和安装 (10)2.5.1包的获取 (10)2.5.2包的安装 (12)第3章快速入门 (13)3.1启动编程环境 (13)3.2创建应用工程 (14)3.3编写应用程序 (15)3.3.1编写应用程序的步骤 (15)3.3.2用户程序的编写操作 (15)3.3.3配置用户程序的执行方式和运行周期 (17)3.4用户程序的编译 (17)3.5登录并下载到IPC (18)3.6EtherCAT总线配置 (22)3.6.1添加EtherCAT主站 (22)3.6.2添加一个伺服驱动从站 (23)第4章FAQ (26)4.1PC与IPC的网络连通性检查 (26)4.1.1网络环境检查 (26)4.1.2检查网络是否互通 (26)4.1.3网络不通检查以及配置 (27)4.2Codesys扫描不到IPC设备的可能原因 (29)4.3Codesys库缺失编译报错 (29)4.4远程桌面使用和配置 (31)4.4.1IPC远程桌面开启方法 (31)4.4.2PC机通过该远程桌面访问IPC (34)第5章结束语 (34)第1章IPC和Codesys1.1IPC概述IPC系列工业控制器是一款集PLC功能、运动控制功能、机器人控制功能及机器视觉功能的工业级控制器(以下简称IPC),为用户提供智能自动化解决方案。
舵机板说明书
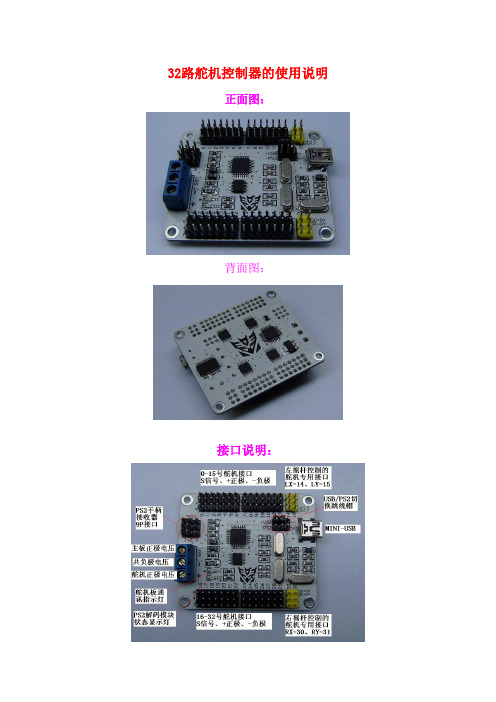
32路舵机控制器的使用说明正面图:背面图:接口说明:1、安装驱动使用MINI-USB线连接上舵机板找到以下的驱动,这里可跳过安装然后打开QSC-32E(PL2303)驱动文件夹双击PL2303 Driver 来手动安装驱动程序如果是WIN7系统需要进行如下操作:鼠标右键单击此文件选择属性弹出如下窗口:然后选择兼容性窗口再这里的用兼容性模式运行这个程序打上勾再下拉窗口中选择WINXP,我这里使用的本身已经是WINXP系统所以无此选项使用者选择WINXP即可然后点击确定退出该窗口然后重新双击驱动软件便可在WIN7模式下用兼容模式安装WINXP的驱动程序2、安装 Framewoks2.0,如果已经安装了或者有高版本的NetFramewoks 文件可跳过安装,如果没有安装这个文件则打不开上位机软件,如果能直接打开上位机软件则可不安装此文件。
WIN7或以上操作系统可直接跳过安装。
3.上位机软件说明左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口右边为舵机图标位置保存窗口,舵机图标可自由拖拉,拖拉后保存位置舵机图标窗口,可自由拖拉如下人形的图标窗口,然后保存位置保存的位置一定要跟上位机软件QSC舵机控制器同一个目录下,以后才能从选择那里直接打开,保存到其他文件夹无效COM口选择端默认通讯速度为高速模式115200 特殊情况下使用低速模式9600动作组调试运行窗口,上面是调试窗口下面是运行窗口初始化:上位机软件初始化,表示从开始地址256号位置开始写动作,只是对软件操作,而不改变已经下载到主板上的动作擦除:对下载到主板上的动作组做清空操作运行动作组:运行已经下载到主板上的动作组停止:停止运行动作组脱机动作组:运行已经下载到主板上的动作组并且下次开机直接执行该动作组禁用:禁用脱机动作组功能舵机口指示条也随意拖动B表示舵机偏差(默认为0),即舵机的相对位置范围为-100----100P表示舵机位置(默认为中位1500)范围为500-2500而导入动作组中的是绝对位置P0=B+P在上图中:#表示几号舵机;P表示舵机的位置;T表示舵机运行到该位置的时间串口发送接收区输入代码点击发送按键即可调试好的舵机偏差值B 跟动作文件P 的保存操作窗口B跟P需要独立保存打开使用也需要独立操作不能用P的打开窗口打开B保存好的文件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我们这里已QSC32E舵机板为例,讲解下舵机板上位机软件的使用:QSC16E操作基本上跟QSC32E类似,唯一不同的是QSC16E不带PS2解码QSC32舵机控制器正面QSC32舵机控制器背面QSC32E 舵机控制器说明图解QSC16E控制器QSC16E 舵机控制器说明图解1、安装驱动使用MINI-USB线连接上舵机板找到以下的驱动,这里可跳过安装然后打开驱动程序的相对应的WINXP/WIN7_QSC舵机控制器(PL2303)驱动文件夹WINXPWIN-7根据不同的系统安装驱动程序。
2、安装 Framewoks2.0,如果已经安装了或者有高版本的NetFramewoks 文件可跳过安装,如果没有安装这个文件则打不开上位机软件,如果能直接打开上位机软件则可不安装此文件。
WIN7或以上操作系统可直接跳过安装。
3.上位机软件介绍说明左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口右边为舵机图标位置保存窗口,舵机图标可自由拖拉,拖拉后保存位置舵机图标窗口,可自由拖拉如下人形的图标窗口,然后保存位置保存的位置一定要跟上位机软件QSC舵机控制器同一个目录下,以后才能从选择那里直接打开,保存到其他文件夹无效COM口选择端默认通讯速度为高速模式115200 特殊情况下使用低速模式9600动作组调试运行窗口,上面是调试窗口下面是运行窗口初始化:上位机软件初始化,表示从开始地址256号位置开始写动作,只是对软件操作,而不改变已经下载到主板上的动作擦除:对下载到主板上的动作组做清空操作运行动作组:运行已经下载到主板上的动作组停止:停止运行动作组脱机动作组:运行已经下载到主板上的动作组并且下次开机直接执行该动作组禁用:禁用脱机动作组功能舵机口指示条也随意拖动B表示舵机偏差(默认为0),即舵机的相对位置范围为-100----100P表示舵机位置(默认为中位1500)范围为500-2500而导入动作组中的是绝对位置P0=B+P舵机位置速度状态数据显示,#表示几号舵机 P表示舵机的位置 T表示舵机运行到该位置的时间串口发送接收区输入代码点击发送按键即可调试好的舵机偏差值B 跟动作文件P 的保存操作窗口B跟P需要独立保存打开使用也需要独立操作不能用P的打开窗口打开B保存好的文件。
<?xml version="1.0" standalone="yes" ?>-<NewDataSet>-<Table1><ID>1</ID><Move>#0 P1500 #1 P1300 #2 P800 #3 P1500 #4 P1500 #8 P1500 #9 P1500 #10 P2300 #11 P1500 #12 P1500 #13 P700 #14 P1500 #19 P1500 #20 P1500 #21 P2200 #22 P1700 #23 P1500</Move><Time>T1000</Time><position>POS0X=632Y=404 POS1X=511Y=351 POS2X=633Y=291 POS3X=512Y=239 POS4X=481Y=158 POS8X=423Y=-3 POS9X=771Y=83 POS10X=644Y=85 POS11X=518Y=82 POS12X=319Y=77POS13X=202Y=83 POS14X=78Y=85 POS19X=350Y=159POS20X=308Y=238 POS21X=187Y=289 POS22X=308Y=349POS23X=184Y=402</position></Table1><Table1/></NewDataSet>保存的位置文件为一个XML格式的文件如果直接打开而非通过上位机软件来打开这个文件会出现如上的数据ID 位置动作文件序号Move 舵机转动的位置文件Time舵机转动的时间文件Position上位机软件商的舵机图标位置其中最重要的文件是MOVE 跟Time文件4.舵机板供电接口说明注意:如果USB一直插着只需要提供舵机供电电压,因为主板供电由USB提供,但是依然接着VSS电压不影响使用。
首先确定自己使用的舵机的供电电压(一般舵机为5V-7.2V),主板供电电压VSS为7V-12V这里以QSC32E舵机板为例、QSC24E-MINI、QSC16E接线图同此基本的供电方案可分为三种,实物接线图如下:第一种供电方案,此供电方案比较常用,主要用于给6V的航模舵机供电一块电池的解决方案。
如果使用的是塑料9G舵机建议串联两个降压模块,一个降压模块的压降为1.2V第二种供电方案,用于7.4V机器人舵机且舵机数量较少的情况下第三种供电方案,用于7.4V电压的机器人舵机且舵机数量较多的情况下。
也是最稳定最理想的一种方案如果是模型舵机且舵机较多的情况下,给舵机供电的电池接一次降压模块即可5、上位机软件的使用双击打开上位机软件在这里点击一次刷新然后选择最新出来的COM口、并单击连接注意主板的 USB/PS2切换跳线帽放置USB位置在舵机口上接上一个舵机,例如接在31号舵机口(接这个地方便于测试上位机软件也便于测试摇杆)注意舵机板舵机排针接口的 S + - 于舵机线的对应一般来说白红黑的线白色接S 黑色接-如果是黄红棕的线黄色接S 棕色接-只选择31号舵机号然后左右拖拉31号舵机号,这个时候通讯指示灯D1会跟着同步闪动且舵机会跟着左右转推到左边、然后添加动作点击添加动作出现一个动作位置再推到右边、然后添加动作出现另一个动作位置调试好文件后点击运行就能运行动作了循环打上√就是循环这个动作组如果边拖舵机号的指示条以及拖拉舵机位置添加动作后启动面板控制的时候舵机号的图标也会跟着同步运动期间也可以单击右下角的保存命名一个你需要的名字,保存动作,便于以后打开使用(对于命名的方式数字代表动作组、中间代表动作、最右边代表按键)然后单击初始化是上位机软件动作组初始化,就是从0动作组,从256地址开始写。
再点击下载动作组选择0舵机板上面的红灯会闪动并出现这样这个动作就下载到了0号动作组然后变成动作组1 开始地址也变成489(这里说明动作组0的地址为为256-497,而动作组1从489后开始下载,如果覆盖掉前面地址将使得动作组失效,所以开始位置尽量不要修改)重新选择0号动作组这里可运行动作组来进行测试《擦除》表示,把已经下载到舵机板上面的动作组删除掉。
然后就可以用手柄来提取动作组了。
(此功能针对QSC32E、QSC24-MINI有效,QSC16E不带此功能)手柄接收器跟舵机板的PS2接口如图所示这是PS2接收器PS2接口9P线接口说明蓝色部分代表杜邦头金属露出口朝向,蓝色方框代表三个3P杜邦头竖着放置插的方向跳线帽用在PS2模式下这个时候打开手柄的电源开关便可以提取上位机软件保存好的动作组了因为前面讲到舵机接到了31号位置,所以打开电源后只要做好连线,直接拖拉右摇杆上下便能驱动31号舵机左右转当然也可以外接拨位开关方便切换USB/PS2模式PS2手柄按键代码表:(只针对QSC32E有效,QSC24E-MINI 为自定义按键模式,QSC16E无PS2功能)2013年4月后QSC32E PS2手柄解码表如下:舵机板更新说明:2012年9月之前的板子:注意:如果舵机板红灯D2一直闪动,有两种情况,一是没有接接收器连线二是接了接收器连线,但是接线错误2012年9月最新板子:注意:如果黄灯一闪一闪的就是等待接收器接入、或者虽然有接收器但连线错误,如果主板上有接收器,黄灯D3常亮2013年4月新板更新说明相对老版更新说明,利用SELECT按键配合三角、叉叉、方框、圈圈、L1、R1按键来扩展动作组,使得动作组扩展到0-16个,使用方法为先按住SELECT再按下其他按键保留动作组跟单舵机调节两种工作模式动作说明:添加动作:新增一个动作删除动作:更新动作:就是修改并替换以前的动作插入动作:就是在动作之间插入一个新的动作重置舵机:所有舵机变成P1500状态即舵机中位重置速度:执行动作时间变成1000(即1秒)串口发送与回显区域点击“发送”便可发送指令4、位置保存舵机图标位置可以自由拖拉,拖拉一个位置然后点击保存位置保存到跟舵机板软件同一个目录文件下这样便于打开以后就可以直接在这里选择打开软件更新(2012.8)1:修复上位机软件容易死机的一些问题2:加入了断电脱机功能如:动作组0 已经下载好动作选择然后点击这个时候拔掉USB线关了电源。
然后下次只要舵机板一供电,在不用手柄操纵的情况下直接循环运行动作组0如需舵机板一上电不直接运行,而用手柄外部运行,请点击禁止来取消此功能运行动作组与脱机动作组的区别:运行动作组只是用来测试保存到舵机板上的动作组,舵机板上电的时候动作组不执行,一定要外接手柄,或者外接单片机方可运行保存到舵机板上面的动作组脱机动作组是舵机板一供电便可马上运行该动作组,如用手柄操作动作组,尽量不要点脱机动作组,如果开启了脱机动作组,然后点击禁用按键便可,脱机下的动作组尽量用按键来驱动脱机动作组这个功能是不在外接控制器的状态下,直接上电就运行而是用的软件更新(2012.9)加入了舵机偏差修正功能,即舵机板发送重置舵机(P1500),然后安装舵盘,但是这样安装上的舵盘也依然跟绝对的中间位置有偏差,这个时候就需要修正P1500的位置,引入了相对位置偏差修复B(-100,100),这里的B通过双击B开启,再双击B关闭调节如图所示如果B=20 P=1500,实际舵机板发送P1520,用于修复舵机偏差。
每个舵机都有自己的一个舵机偏差B,等调节好B后可保存,跟打开重新导入5、高级控制篇QSC32E外接单片机通讯接线图,外接单片机请去掉跳线帽。
其中单片机GND跟舵机板的-级必须连上,而单片机供电可根据需要可以接舵机板上的5V也可以外部供电,如果单片机是3V3供电那么请自身供电。
外接单片机接线图(外接单片机模式下无法使用PS2手柄)QSC16E外接单片机通讯示意图,外接单片机请取掉跳线帽舵机控制指令集# <ch> P <pw> S <spd>... # <ch> P <pw> S <spd> T <time> <ch> =舵机号, 0 - 31.<pw> =脉冲宽度单位微秒, 范围500 - 2500.<spd> =移动速率us/s 每秒移动脉宽数针对一个舵机有效<time> =移动到指定位置使用的毫秒数(Optional)例子"#5 P1600 S750 "移动舵机号5 到脉宽1600us 速率为每秒移动脉宽750微秒"#5 P1600 #10 P750 T2500 "移动舵机号5 到脉宽1600us 移动舵机号10 到脉宽750us 使用时间为2500ms注:T 可以对前面所有舵机有效除了有S的舵机号#5 P1600 #10 P750 #12 P1700S500 T2500 5号和10舵机是使用2.5S完成移动12舵机看它以速率500us/s实际使用时间确定注意外接单片机、串口助手,通讯代码需加回车\r\n如舵机控制:#5 P1600 T500\r\n动作组控制:PL0 SQ1 SM100\r\n外接单片机或者ARDUINO时,运行动作组执行指令说明运行动作组PL <p> SQ <s> [SM <m>] [IX <i>] [ONCE]PL 0 指定动作场景必须指定SQ <s> 指定动作组编号s, 0 – 127 不指定为0SM <m> 指定速度比m, –200- 200 不指定为100IX <i> 指定启动动作组开始步编号i , 0 - 255。