无人机动力系统介绍
新型无人机的动力系统设计与优化

新型无人机的动力系统设计与优化在当今科技飞速发展的时代,无人机已经在众多领域展现出了其独特的价值和广阔的应用前景。
从农业植保到影视拍摄,从物流配送再到军事侦察,无人机的身影无处不在。
而在无人机的众多组成部分中,动力系统无疑是其核心之一,它直接决定了无人机的飞行性能、续航能力、负载能力以及工作的可靠性。
因此,新型无人机动力系统的设计与优化成为了众多科研人员和工程师们关注的焦点。
一、新型无人机动力系统的类型与特点目前,常见的新型无人机动力系统主要包括电动动力系统、油动动力系统以及混合动力系统。
电动动力系统具有结构简单、维护方便、噪声低等优点。
其主要由电池、电机和电子调速器组成。
电池为电机提供能量,电子调速器则用于控制电机的转速。
然而,电动动力系统的续航能力往往受到电池容量的限制。
油动动力系统则通常以燃油发动机为核心,具有较高的能量密度,能够提供较长的续航时间。
但油动系统相对较为复杂,噪声较大,且对燃油的品质和维护要求较高。
混合动力系统结合了电动和油动的优势,通过合理的能量管理策略,在不同的工作场景下切换使用不同的动力源,以达到最优的性能表现。
二、新型无人机动力系统设计的关键因素1、功率与重量比在设计动力系统时,需要确保其能够提供足够的功率以满足无人机的飞行需求,同时要尽量减轻系统的重量。
这就要求在选择电机、发动机、电池等部件时,进行精细的权衡和优化。
2、能量密度对于电动动力系统,电池的能量密度至关重要。
高能量密度的电池能够在相同重量下提供更长的续航时间。
而对于油动系统,燃油的能量密度也是影响续航的关键因素。
3、效率动力系统的效率直接关系到能量的利用效率和续航能力。
无论是电机、发动机还是传动系统,都需要追求高效率的工作状态。
4、可靠性无人机在工作中可能面临各种复杂的环境和工况,动力系统必须具备高度的可靠性,以确保无人机能够稳定、安全地飞行。
三、新型无人机动力系统的优化策略1、材料创新采用新型的轻质高强材料,如碳纤维、钛合金等,减轻动力系统各部件的重量,同时提高其强度和耐用性。
固定翼无人机技术-航空电机动力系统

定子组成
01
主磁极
02
换向极
03
04
机座
电刷装置
主磁极的作用是产 生气隙磁场。主磁 极由主磁极铁芯和 励磁绕组两部分组 成
换向极的作用是改善 换向,减小电机运行 时电刷与换向器之间 可能产生的换向火花 ,一般装在两个相邻 主磁极之间,由换向 极铁芯和换向极绕组 组成。
电机定子的外壳称为 机座。为保证机座具 有足够的机械强度和 良好的导磁性能,一 般为铸钢件或由钢板 焊接而成。
结构上,有刷电机的转子是线圈绕组,和动力输出轴相连,定子是永磁磁钢;无 刷电机的转子是永磁磁钢,连同外壳一起和输出轴相连,定子是绕组线圈,去掉了有 刷电机用来交替变换电磁场的换向电刷,故称之为无刷电机。
名称 直流有刷电动机 直流无刷电动机
定子 永磁磁铁
绕组
转子 绕组 永磁磁铁
换向电刷 有 无
直流无刷电动机型号
感 谢 聆听
电刷装置是用来引入 或引出直流电压和直 流电流的。电刷装置 由电刷、刷握、刷杆 和刷杆座等组成。
转子组成
01
02
03
04
电枢铁芯
电枢绕组
换向器
转轴
电枢铁芯是主磁路 的主要部分,同时 用以嵌放电枢绕组 。一般电枢铁芯采 用由0.5mm厚的硅钢 片冲制而成的冲片 叠压而成
电枢绕组的作用是产 生电磁转矩和感应电 动势,是直流电机进 行能量变换的关键部 件。它是由许多线圈 (以下称元件)按一 定规律连接而成。
航空电机动力系统
航空电机动力系统
15.1
航空电机动力系统组成
无刷电动机动力系统组成
空心杯有刷电动机动力系统组成
无刷电动机动力系统组成
无刷电动机动力系统主要由电池、无刷电动机、电子调速器(ESC,简称电调,如 图所示)、平衡充电器和传动系统组成。
无人机动力部件(电机和电调)系统知识与原理
本文向各位无人机航模爱好者介绍下电机的种类(有刷电机和无刷电机)、转速调节器(简称电调)。
电动飞机的动力,主要是指2个元件:第一就是电机(Motor),也称马达,第二是电调。
电调的作用是控制电机转速的调速器(Speed Controller),很久之前早期的调速器是使用舵机控制可调电阻拨片来实现,此类称为机械调速器,现已退出历史舞台,仅能在一些复刻车架包装盒或者说明书上看到其照片。
现在我们说调速器,都是指电子调速器,简称电调,英文Electronic Speed Controller,缩写ESC按大类来分,可分为有刷动力和无刷动力。
即有刷电调搭配有刷电机,以及无刷电调搭配无刷电机。
有刷电机与无刷电机车模用的电机,全部都是内转子电机,也就是电机外壳是固定的,靠里面圆形转子转动。
外转子的这里不予讨论,想要了解外转子与内转子的,可以自行百度了解。
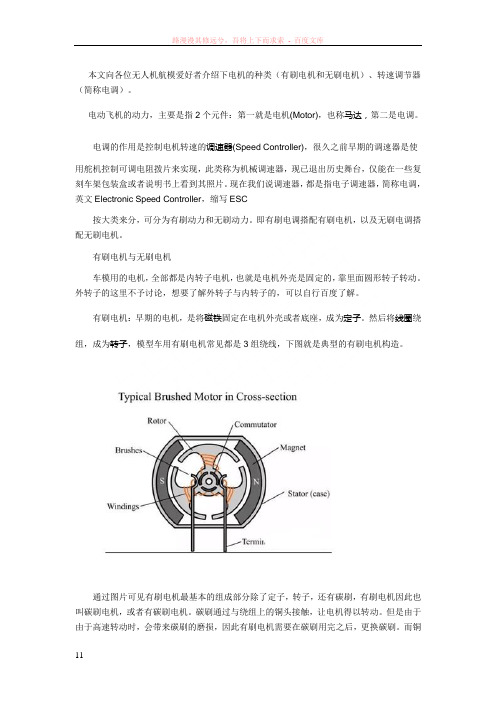
有刷电机:早期的电机,是将磁铁固定在电机外壳或者底座,成为定子。
然后将线圈绕组,成为转子,模型车用有刷电机常见都是3组绕线,下图就是典型的有刷电机构造。
通过图片可见有刷电机最基本的组成部分除了定子,转子,还有碳刷,有刷电机因此也叫碳刷电机,或者有碳刷电机。
碳刷通过与绕组上的铜头接触,让电机得以转动。
但是由于由于高速转动时,会带来碳刷的磨损,因此有刷电机需要在碳刷用完之后,更换碳刷。
而铜头也会磨损,因此在有碳刷时代的竞赛电机,除了更换碳刷,还需要打磨铜头,让铜头保持光滑。
更换碳刷后还需要磨合,让碳刷与铜头的接触面积最大化,以实现最大电流来提高电机的转速/扭矩。
无刷电机:既然有刷有以上的弊端,于是无刷便应运而生。
无刷是把线圈绕在定子上,然后把磁铁做成转子,转动的是磁铁,而不是线圈,因此就没有了碳刷这个消耗品。
既然线圈固定了,那么如何让线圈产生变化的磁场呢?这就是为什么无刷需要3根线的原因了。
利用无刷电调,给线圈组对应地供电以产生相应的磁场,就可以实现不停地驱动磁铁转子保持转动。
智能控制在无人机动力系统中的应用
智能控制在无人机动力系统中的应用随着科技的飞速发展,无人机在各个领域的应用越来越广泛,从军事侦察到民用航拍,从物流配送到农业植保,无人机正以其独特的优势改变着我们的生活和工作方式。
而在无人机的众多组成部分中,动力系统无疑是其核心之一,直接决定着无人机的性能、续航能力和可靠性。
智能控制技术的出现,为无人机动力系统的发展带来了新的机遇和挑战。
一、无人机动力系统概述无人机的动力系统主要包括发动机、电机、电池、螺旋桨以及相关的控制系统。
发动机和电机是动力的产生装置,电池为其提供能源,螺旋桨则将动力转化为推力,而控制系统则负责协调和优化各个部件的工作,以实现无人机的稳定飞行和各种任务需求。
在传统的无人机动力系统中,控制方式往往比较简单,主要依赖于预设的参数和固定的控制算法。
然而,这种方式在面对复杂多变的飞行环境和任务需求时,往往显得力不从心。
例如,在不同的海拔高度、气温和风速条件下,发动机或电机的性能会发生变化,如果不能及时调整控制策略,就可能导致无人机飞行不稳定甚至出现故障。
二、智能控制技术的特点与优势智能控制技术是一种融合了人工智能、自动控制理论和计算机技术的新型控制方法。
它具有自学习、自适应、自组织和自优化的特点,能够根据系统的运行状态和环境变化,实时调整控制策略,从而提高系统的性能和可靠性。
与传统控制技术相比,智能控制技术在无人机动力系统中的应用具有以下显著优势:1、更好的适应性智能控制技术能够自动感知环境的变化,并迅速调整动力系统的工作参数,以适应不同的飞行条件。
例如,当无人机在高海拔地区飞行时,由于空气稀薄,发动机的进气量会减少,智能控制系统可以自动增加燃油喷射量或调整电机的转速,以保证足够的动力输出。
2、更高的精度和稳定性通过对传感器数据的实时分析和处理,智能控制系统能够实现对动力系统的精确控制,从而提高无人机的飞行精度和稳定性。
例如,在无人机进行航拍作业时,需要保持稳定的飞行姿态和高度,智能控制系统可以根据陀螺仪和加速度计等传感器的数据,实时调整动力输出,确保无人机的稳定飞行。
无人机动力的原理与应用

无人机动力的原理与应用1. 无人机动力的基本原理无人机是一种通过自身发动机提供动力来推动自己飞行的无人飞行器。
动力系统是无人机正常飞行所必须的关键组成部分,它通过提供足够的推力来克服重力,使无人机能够在空中悬停、向前飞行和变向。
无人机动力系统通常采用内燃机、电机或涡轮引擎来提供推力。
以下是一些常见的无人机动力系统:•内燃机动力系统内燃机动力系统使用燃烧的燃料来产生推力。
这种动力系统通常使用汽油或航空煤油作为燃料,并通过火焰燃烧产生高温的气体来驱动发动机的旋转部件,从而产生推力。
内燃机动力系统具有较高的功率和长时间的飞行续航能力,适用于需要较长航程和高速飞行的无人机。
•电动动力系统电动动力系统使用电池作为能源,并通过电机将电能转化为机械能来产生推力。
电动动力系统通常具有较低的功率和较短的飞行续航能力,但具有较低的噪音和较低的排放。
这种动力系统适用于需要较低巡航速度和较短航程的无人机。
•涡轮引擎动力系统涡轮引擎动力系统使用压气机和涡轮来产生推力。
这种动力系统通常具有较大功率和较长的飞行续航能力,适用于需要长航程和高速飞行的无人机。
2. 无人机动力的应用无人机由于其灵活性和多样化的功能,被广泛应用于各个领域。
以下是一些常见的无人机应用领域:•航拍摄影无人机配备高清摄像头,可以实现高空俯瞰拍摄,并在地面进行实时传输。
航拍摄影无人机被广泛应用于电影拍摄、旅游宣传、房地产营销等领域。
•农业农业领域中,无人机可以配备传感器和摄像头,对农田进行监测、测绘和遥感分析,实现精准农业管理。
无人机还可以进行农作物的喷洒和施肥,提高作物产量和农业效益。
•环境监测无人机可以配备各种传感器,用于进行环境监测。
例如,无人机可以监测气象信息、大气污染和水质情况,提供及时准确的环境数据,为环境保护提供支持。
•灾害救援在灾害发生后,无人机可以飞越灾区进行搜救、物资投送和救援工作。
无人机可以通过图像分析和传感器监测,提供灾情分析和实时情报,为救援行动提供重要支持。
无人机的六种动力驱动及常用接口
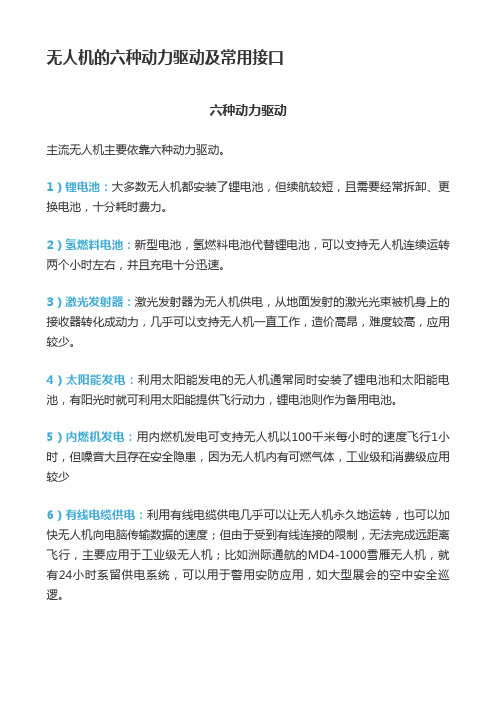
无人机的六种动力驱动及常用接口六种动力驱动主流无人机主要依靠六种动力驱动。
1)锂电池:大多数无人机都安装了锂电池,但续航较短,且需要经常拆卸、更换电池,十分耗时费力。
2)氢燃料电池:新型电池,氢燃料电池代替锂电池,可以支持无人机连续运转两个小时左右,并且充电十分迅速。
3)激光发射器:激光发射器为无人机供电,从地面发射的激光光束被机身上的接收器转化成动力,几乎可以支持无人机一直工作,造价高昂,难度较高,应用较少。
4)太阳能发电:利用太阳能发电的无人机通常同时安装了锂电池和太阳能电池,有阳光时就可利用太阳能提供飞行动力,锂电池则作为备用电池。
5)内燃机发电:用内燃机发电可支持无人机以100千米每小时的速度飞行1小时,但噪音大且存在安全隐患,因为无人机内有可燃气体,工业级和消费级应用较少6)有线电缆供电:利用有线电缆供电几乎可以让无人机永久地运转,也可以加快无人机向电脑传输数据的速度;但由于受到有线连接的限制,无法完成远距离飞行,主要应用于工业级无人机;比如洲际通航的MD4-1000雪雁无人机,就有24小时系留供电系统,可以用于警用安防应用,如大型展会的空中安全巡逻。
常用接口无人机飞控作为连接所有设备的大脑,接口种类越来越多,下面简单介绍下无人机常用的几个接口。
01PWM这是第一个要介绍的,所有航模和无人机都离不开的一种接口。
单线信号,周期发送正脉冲,变化脉宽作为传递信息的方式,一个针脚传递一个通道,往往搭配地线和电源线可控制一个舵机或一个电调,是无人机或航模入门第一个需要了解的接口。
优点是简单,稳定的传输一个可量变的信号,缺陷是速度低,目前常见的标准是每秒50次或300至400次。
02PPMPWM的升级版,就是每个信号周期变为发送一组多个脉宽的组合,来同时传递多个通道的变化信息。
早期也被用于遥控器无线电信号和航模模拟器信号,现在多用于接收机与飞控连接,带有PPM信号输出的接收机很多,是无人机入门必配,那些用转换器的是脱裤子放屁。
农用植保无人机动力系统现状及应用

农用植保无人机动力系统现状及应用随着科技的不断发展,无人机正在逐渐走进人们的视野,成为农业生产中的一项重要技术装备。
作为现代农业生产的重要工具,农用植保无人机具有诸多优势,如精准施药、快速覆盖大面积田地、减少农药使用量、降低成本等。
农用植保无人机的发展得到了国家的大力支持和政策鼓励,其应用前景广阔,已成为推动农业现代化的重要力量。
本文将就农用植保无人机的动力系统现状及应用情况进行介绍。
一、农用植保无人机动力系统现状(一)动力系统类型目前,农用植保无人机的动力系统主要有两大类,一类是基于电池动力的电动无人机,另一类是基于燃气动力的内燃机无人机。
电动无人机通常采用锂电池等高能密度电池作为动力源,具有零排放、低噪音、低维护成本等优点,动力系统简单可靠,适合在小范围、多次重复植保作业中使用。
而内燃机无人机则采用燃料发动机(如汽油发动机、柴油发动机等)为动力源,具有续航能力强、性能稳定等优点,适合在大范围、一次性植保作业中使用。
(二)动力系统技术特点农用植保无人机的动力系统技术特点主要表现在以下几个方面:1. 高效节能:现代农用植保无人机动力系统在设计上充分考虑能源利用效率和环保要求,采用先进的动力系统设计和控制技术,实现了动力系统的高效节能,提高了无人机的续航能力和作业效率。
2. 多源动力:一些农用植保无人机具备多源动力功能,即在不同飞行阶段可以切换不同的动力源,如从电动动力切换至内燃动力,以适应不同的作业需求和环境条件。
3. 智能控制:农用植保无人机动力系统采用了智能控制技术,能够实现对动力系统的精准控制和动态调整,确保无人机在植保作业中的稳定性和安全性。
二、农用植保无人机动力系统应用(一)植保作业农用植保无人机主要应用于农田的植保作业,包括作物喷洒、施肥等。
其应用优势主要表现在以下几个方面:1. 高效精准:农用植保无人机具有精准定位和精准施药的能力,可以根据作物生长状况和实际需求进行智能化施药,降低了农药的使用量,提高了施药效果,减少了污染。
无人机动力系统的组成
无人机动力系统的组成
无人机动力系统的组成主要有:电机、电调、螺旋桨以及电池。
(1)电机:指将电能转化为机械能的一种转换器,由定子、转子、铁心、磁钢主要部分组成。
电机分为有刷电机和无刷电机。
无人机的电机主要以无刷电机为主,一头固定在机架力臂的电机座,一头固定螺旋桨,通过旋转产生向下的推力。
(2)电调:指电子调速器,其主要作用是就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。
(3)螺旋桨:是指将发动机转动功率转化为推进力或升力的装置,螺旋桨有两个重要的参数,桨直径和将螺距,直径单位是英寸,螺距单位是毫米。
我们平时所说的8045浆就是指直径8英寸螺距45mm的桨。
(4)电池:无人机上的电池一般是高倍率锂聚合物电池,特点是能量密度大、重量轻、耐电流数值较高等。