随机激励下重载车辆空气悬架参数多目标优化
铁道车辆悬挂参数稳健性设计及多目标优化

列车安全以及稳定地运行是铁路运输的基本要求。 高速列车的发展使得列车 运行速度不断提升,这对于车辆运行的稳定性提出了更高的要求。车辆悬挂系统 能够抑制蛇形运动,确保车辆运行的稳定性,它的设计非常重要。 论文以 CRH2 动车组拖车为研究对象,建立了车辆动力学模型,并对该模型 做了参数化处理, 完成了临界速度、脱轨系数以及轮重减载率这三个车辆运行稳 定性指标的计算。在此基础上,结合多目标优化软件 Isight,通过最优拉丁超立 方算法完成实验设计,进而建立车辆横向动力学 Kriging 近似模型,基于该近似 模型运用归一法结合第二代非劣排序遗传算法完成了对上述车辆运行稳定性指 标的多目标优化。论文还运用蒙特卡洛模拟对这三个目标的稳健性作了分析, 并 运用 6 Sigma 稳健优化方法对悬挂参数做了稳健设计。结果表明,经过优化的悬 挂参数设置有利于提高车辆运行稳定性。 关键词:铁道车辆 悬挂系统 稳定性 稳健性设计 多目标优化1 1.2 1.3 1.4 第2章 2.1 2.2 2.3 第3章 3.1 3.1.1 3.1.2 3.2 3.3 3.3.1 3.3.2 3.4 3.4.1 3.4.2 3.4.3 第4章 4.1 4.2 4.3 4.3.1 4.3.2 4.3.3 第5章 5.1 绪论................................................................................................................1 论文选题背景及意义....................................................................................1 国内外研究现状............................................................................................1 铁道车辆运行稳定性及评价指标................................................................2 本文所做的工作............................................................................................6 铁道车辆悬挂系统简介................................................................................8 轴箱悬挂装置................................................................................................8 中央悬挂装置................................................................................................8 悬挂参数对系统动力学影响........................................................................9 高速动车技术特点和动力学仿真模型的建立.......................................... 11 高速动车结构概述及其技术参数.............................................................. 11 高速动车转向架整体结构概述.............................................................. 11 高速动车主要技术参数.......................................................................... 11 车辆系统动力学理论模型..........................................................................12 多体系统车辆动力学建模的原则与方法..................................................15 多体系统车辆动力学建模的基本原则..................................................15 多体系统车辆动力学建模的基本方法..................................................16 基于 SIMPACK 的高速列车客车动力学建模.......................................... 16 建模基本假设..........................................................................................16 利用仿真软件 SIMPACK 建立客车动力学模型.................................. 16 计算车辆横向稳定性动力学评价指标..................................................20 基于 Isight 的车辆运行稳定性代理模型...................................................24 代理模型概述..............................................................................................24 变量的选择..................................................................................................26 基于 Isight 的车辆运行稳定性 Kriging 模型的建立................................ 27 模型集成..................................................................................................27 DOE 试验设计.........................................................................................29 Kriging 近似模型的构建........................................................................ 34 车辆悬挂参数多目标优化..........................................................................36 多目标优化概述..........................................................................................36
汽车发动机悬置系统多目标设计优化研究

汽车发动机悬置系统多目标设计优化研究张志强;徐铁;陈丹华;蒋伟康【摘要】动力总成悬置系统对于汽车振动与噪声控制十分重要,通过考虑车身耦合因素,建立动力总成悬置系统十五自由度耦合模型,以扭矩轴解耦率和总传递振动力为综合优化目标进行优化,并将整车常用行驶工况考虑在内,以整车实测数据辨识出发动机激振力作为系统实际输入,应用粒子群算法对悬置系统刚度参数进行优化.计算表明选择合适的刚度参数可以有效降低汽车的传递振动力,并提高扭矩轴解耦率,从而改善汽车乘坐的舒适性.%Engine mounting system is very important for automobile vibration and noise control. In this paper, a 15-DOF vehicle's body and the powertrain mounting system coupled model is established. With the decoupling rate of the torque shaft and the total transferred vibration force as the objective functions, the whole vehicle structure is optimized considering the common driving conditions. The particle swarm optimization (PSO) algorithm is used to optimize the mounting stiffness parameters with the use of the identified excitation forces as the actual force input. The results show that choosing proper stiffness parameters of the mounting system can effectively reduce the transferred vibration force and increase the decoupling rate of the torque shaft so that the comfort of the automobiles can be improved.【期刊名称】《噪声与振动控制》【年(卷),期】2017(037)003【总页数】5页(P117-121)【关键词】振动与波;发动机悬置系统;舒适性;多目标优化;粒子群算法【作者】张志强;徐铁;陈丹华;蒋伟康【作者单位】上海交通大学振动、冲击、噪声研究所机械系统与振动国家重点实验室,上海 200240;上汽通用五菱汽车股份有限公司,广西柳州 545007;上汽通用五菱汽车股份有限公司,广西柳州 545007;上海交通大学振动、冲击、噪声研究所机械系统与振动国家重点实验室,上海 200240【正文语种】中文【中图分类】TB53;U461.4近年来国内自主品牌汽车的市场占有率不断提升,但是在振动与噪声控制方面与国外高端产品相比还存在一定的差距。
附加气室容积可调空气悬架多目标参数匹配
附加气室容积可调空气悬架多目标参数匹配概述气室容积可调空气悬架是一种能够根据不同路面条件,自动调节车辆悬架高度的车辆底盘动态控制系统。
该系统可以通过调整悬架的气室容积,提高乘坐舒适性,减少车辆的噪音与震动,并且能够提升车辆的操控性与稳定性。
本文将介绍气室容积可调空气悬架的多目标参数匹配方法,并讨论该方法对车辆驾驶的影响。
气室容积可调空气悬架的结构与工作原理气室容积可调空气悬架由气压控制系统和悬架组成,悬架主要由气室与减震器构成。
当车辆经过不平的路面时,气压控制系统会根据路面情况调整气室的容积,从而提高车辆的乘坐舒适性,并减少车辆的动态摆动。
同时,气室容积可调空气悬架还能根据车速、车辆负载等因素自动调节悬架高度,提升车辆的稳定性和操控性。
多目标参数匹配方法气室容积可调空气悬架的多目标参数匹配方法,就是根据车辆不同的使用环境和运行模式,选取一组最优的参数。
这些参数包括悬架阻尼、气室容积和控制策略等。
首先,需要根据车辆的使用场景和驾驶习惯,设定目标参数。
例如,高速行驶时应注重车辆稳定性与操控性的提高,要求加大悬架阻尼,减小气室容积,提高悬架刚度;而在城市行驶时,则需要优化车辆的乘坐舒适性,应减小悬架阻尼,增大气室容积,降低悬架刚度。
其次,根据目标参数,利用数值计算方法,如有限元法、多体动力学分析等手段,对悬架进行分析与优化,并确定最优参数组合。
最后,经过实际试车验证,确定悬架最终参数组合是否符合实际使用效果。
影响驾驶的因素气室容积可调空气悬架的参数匹配与调节,可以有效提高车辆的动态性能和乘坐舒适性,优化驾驶体验。
但是,由于悬架配置的差异,存在一些悬架在特定使用场景下的适应性问题。
例如,若将一辆运载重物的货车悬架采用气室容积可调空气悬架,稍不注意就会出现悬架下沉的情况,导致货车车身高度不稳定,容易受损。
结论随着汽车行业的不断发展,气室容积可调空气悬架已经成为更加普及的汽车悬架系统。
多目标参数匹配方法可以更好地提高气室容积可调空气悬架的适应性与性能,以更好地适应不同路面和使用场景。
汽车动力总成悬置支架的多目标拓扑优化
汽车动力总成悬置支架的多目标拓扑优化张兰春;赵清海;张洪信;陈潇凯;张铁柱【摘要】汽车动力总成悬置支架设计是一个静动态多性能指标的优化过程.为克服单目标拓扑优化的局限性,以静态多工况下刚度和动态特征值为性能指标,采用折衷规划法定义目标函数,构建多目标连续体结构拓扑优化数学模型,进行悬置支架多目标拓扑优化.依据拓扑优化结果并考虑制造工艺性等要求,对悬置支架进行详细设计.最后对支架设计模型进行强度校核、模态仿真分析和耐久性试验验证,结果表明,采用所提出的方法进行悬置支架的概念设计可行且有效.%The design of an automotive engine mount bracket is an optimization process of static and dynam-ic multi-performance indicators. In order to overcome the limitation of single objective topology optimization, a math-ematical model for multi-objective topology optimization of continuum structure is constructed first with static stiffness in multi-conditions and dynamic eigenvalues as performance indicators to define objective function by compromise programming, and a multi-objective topology optimization for engine mount bracket is conducted. Then according to the results of topology optimization with consideration of manufacturing process requirements, the detailed design of engine mount bracket is performed. Finally, strength check, modal analysis and durability test verification are car-ried out. The results demonstrate that the method adopted is feasible and effective for the concept design of engine mount bracket.【期刊名称】《汽车工程》【年(卷),期】2017(039)005【总页数】5页(P551-555)【关键词】发动机悬置支架;拓扑优化;多目标优化;折衷规划法【作者】张兰春;赵清海;张洪信;陈潇凯;张铁柱【作者单位】江苏理工学院汽车与交通工程学院,常州 213001;青岛大学动力集成及储能系统工程技术中心,青岛 266071;青岛大学动力集成及储能系统工程技术中心,青岛 266071;北京理工大学机械与车辆学院,北京电动车辆协同创新中心,北京100081;青岛大学动力集成及储能系统工程技术中心,青岛 266071【正文语种】中文汽车动力总成悬置支架是动力悬置系统的重要安全件和功能件。
汽车发动机悬置系统多目标优化的研究

第26卷第6A 期1996年11月 东 南 大 学 学 报JOU RNAL O F SOU TH EA ST UN I V ER S IT YV o l 126N o 16AN ov .1996汽车发动机悬置系统多目标优化的研究温任林 颜景平(东南大学机械工程系,南京210018)摘 要 以整车为背景,提出以汽车驾驶室振动能量最小和发动机悬置能量解耦为综合目标的多目标优化模型,对发动机悬置参数进行了优化,计算实例表明选择合适的发动机悬置参数可以有效地降低汽车的振动.关键词 发动机悬置系统;振动控制;优化设计中图法分类号 U 464.123汽车发动机工作中产生的不平衡力或力矩及路面不平度是引起汽车振动的主要激振源,选择合适的发动机支承的位置、角度和刚度参数,能有效地控制这两方面的干扰力对汽车整车振动的影响,从而降低汽车振动和噪声.发动机悬置系统优化设计在国内外都受到了重视,提出过多种优化方法,但它们大都是以发动机系统作为一个子系统单独予以考虑,忽略了它与整车的联系[1~4],即使与整车联系起来考虑,也只考虑发动机引起的振动,而忽略了路面不平度对汽车振动的影响,或只考虑路面不平度的激励而忽略发动机本身对整车振动的影响[5~7],实际上,发动机既是激振源,同时也是受振体,它的振动对整车影响甚大.本文以整车为背景,提出以汽车驾驶室振动相对能量[8]和发动机悬置系统各阶振型解耦的多目标优化方法,并根据该方法建立了优化数学模型.1 汽车驾驶室系统振动能量汽车整车系统是由多个子系统组成的多自由度系统,根据汽车特点作如下假设[7~9]:i )路面激励主要作用在竖直方向上;ii )悬架与轮胎刚度为位移的一次函数,悬架阻尼为速度的一次函数,轮胎阻尼忽略不计;iii )汽车是左右对称的,并在平衡位置附近作微幅振动;iv )车架的一阶弯曲和扭转刚度视为常数,变形量与其到汽车质心的距离成正比.将汽车简化成15个自由度的力学模型[10].根据力学模型可写出它的运动方程,用矩阵可表示成: M X+CX+K X =F(1)式中,M 为系统质量矩阵;C 为系统阻尼矩阵;K 为系统刚度矩阵;F 为外激扰力(路面不平度Ξ收稿日期:1996-01-16,修改稿收到日期:1996-05-21.干扰力和发动机惯性力)列阵;X ,X,X分别为系统的位移、速度和加速度列阵.应用模态理论求解式(1)的速度传递函数矩阵中第(l ,p )元素: H lp (j Ξ)=∑ni =1j ΞΥli Υp ik i [1-(Ξ Ξi )2]+2j Φi (Ξ Ξi )(2)式中,H lp (j Ξ)为系统p 点输入,l 点输出的速度传递函数;Υli Υp i 分别为系统第i 阶l ,p 处的振型;k i ,Ξi ,Φi 分别为第i 阶模态刚度、角频率及阻尼比.考虑无阻尼自由振动情况,由式(1)得式(2)的振型方程 M X+K X =0(3)相应式(3)的广义特征值为 K Υ=Ξ2M Υ(4)式中,Ξ为系统的固有频率;Υ为系统的相应特征向量(振型).根据速度传递函数的定义,可计算出汽车驾驶室的振动速度: V =H F ′(5)式中,V 为汽车驾驶室系统速度列阵;H 为速度传递函数矩阵;F ′为有效外激扰力列阵;从而得到驾驶室子系统的振动能量: T =M J V 2 2(6)式中,M J 为驾驶室的质量(转动惯量)矩阵.在不同运行工况和不同路面激励下,汽车驾驶室的振动能量就可根据式(6)计算得到.2 发动机悬置系统的能量解耦当在主惯性轴坐标系中讨论发动机悬置系统时,该系统的质量矩阵可写成如下对角矩阵的形式: M F =diag (m ,m ,m ,J x ,J y ,J z )(7)式中,m 为发动机系统质量,J x ,J y ,J z 为发动机系统的转动惯量.发动机系统的刚度矩阵为 K F =∑ni =1ET iC Ti D i C i E i(8)式中,E i 为物理坐标与广义坐标的变换矩阵: E i = 1000z i-y i 01-z iy i 001y i -x i 0 C i 为支承三弹性主轴方向数:C i =C si C u i C v i C si = co s Ηsi sin Ηsi0 -sin Ηsi co s Ηsi0 0 0 0 ; C u i = 10 0 0co s Ηu i sin Ηu i 0-sin Ηu ico s Ηu i ; C v i = co s Ηv i0-sin Ηv i 0 10 sin Ηv i 0co s Ηv i u i v i si uvs x y z 601东 南 大 学 学 报第26卷D i 为支承三向主刚度对角矩阵:D i =diag (k u i ,k v i ,k si )(第i 个支承沿uvs 弹性主轴的刚度);n 为发动机支承个数.将上述的M F 和K F 代入式(3)即可求得发动机系统的振型.根据下式可求出发动机悬置系统的能量分布百分比矩阵[5]: E ij =M j j Υ2ij Ξ2i∑6j =1M j j Υ2ij Ξ2i(9)式中,Mj j是质量矩阵元素;Υij 是第i 阶振型的第j 元素;Ξi 是第i 阶振型的角频率.实际应用中,使发动机系统沿6个方向的振动完全解耦是没有必要的,汽车的振动主要来自绕发动机曲轴的转动和轮胎输入的激励,只要使这些方向能有较高程度的解耦即可.3 发动机悬置系统的优化3.1 目标函数 发动机悬置系统对整车有多种振动控制作用,它既要隔离来自发动机本身的振动和冲击,也要吸收由于路面激励引起的振动,从而提高汽车乘坐的舒适性,为此,应使发动机悬置解耦并减小驾驶室振动能量.由于汽车在不同路面上运行时,汽车运行工况是不一样的,为具代表性,这里同时考虑了不同运行工况(一般取怠速工况,中速工况,最高转速工况等)和不同路面时的振动情况,因此可建立目标函数: F (X )=∑6i =1,i ≠jWiE ij E ii +∑nk =1RkT k(10)式中,F (X )为目标函数;X 为设计变量;W i 为能量解耦的加权因子;R k 为驾驶室系统振动能量加权因子;T k 为驾驶室在k 工况激励下的振动能量.3.2 设计变量由上述分析可知,发动机悬置系统的动力学特性与其支撑位置,支承元件的安装角度及刚度,发动机系统相对车架的位置以及发动机的质量,转动惯量等因素有关.通常不能改变发动机系统本身的特性(如发动机质量、转动惯量等)而只可改变悬置参数及其相对车架的位置,因此本文将这些变量视为设计变量.3.3 约束条件在设计发动机悬置时其所受到的约束条件有:1)边界约束条件.发动机悬置相对车架的位置及支承参数受到上下限约束,可以表示成:X l ≤X ≤X u .2)频率约束条件.由于发动机系统与整车系统的频率匹配要求,其中6个方向的频率约束为:f il ≤f ≤f iu (i =1,2,…,6).3)支承作用.保证支承发动机系统总成的质量而不产生过大的静位移,因此悬置应具有一定的刚度值:K >K l ,后者为允许静位移的刚度.701第6A 期温任林等:汽车发动机悬置系统多目标优化的研究3.4 最优化方法及特点求解有约束非线性规划问题的数学方法很多,鉴于本优化模型的特点,选用转动坐标轴直接搜索可行方向法(D SFD ).其特点是间接的罚函数法和直接的可行方向法的组合,起始点可以任意给定.优化框图如附图所示.附图 程序框图4 优化设计实例初始参数如表1所示,汽车发动机系统为三点支承,其中第一和第二支承为左右对称布置.表1 发动机悬置优化前参数支承点x c my c mz c mΗu (°)Ηv (°)Ηs (°)k u kg cm -1k vkg c m -1k skg c m -1127.30.05-14.60.00.00.0249.0249.0878.03-43.2-12.5-11.643.040.00.01849.0622.0970.0 优化前发动机悬置系统各阶固有频率,能量分布百分比如表2所示.表2 发动机悬置系统固有频率、能量分布百分比方 向xyzΗxΗyΗz固有频率 H z15.59.312.613.411.214.0能量比(%)70.772.596.039.771.059.2 优化前驾驶室系统在工况n =500,750,1000r m in 时的振动能量分别为T =0.0797,801东 南 大 学 学 报第26卷0.15,0.1765J.优化后的发动机支承参数如表3所示.表3 发动机悬置优化后参数支承点x c my c mz c mΗu (°)Ηv (°)Ηs (°)k u kg cm -1k vkg c m -1k skg c m -1132.90.0-14.960.00.00.0880.0111.2367.03-41.2-10.2-7.0040.045.00.01905.7200.0415.0 优化后发动机悬置系统固有频率,能量分布百分比如表4所示.表4 发动机悬置系统固有频率、能量分布百分比方 向xyzΗxΗyΗz固有频率 H z14.26.08.08.47.610.8能量比(%)96.484.099.788.396.795.4 优化后驾驶室系统在工况n =500,750,1000r m in 时的振动能量分别为T =0.06427,0.1046,0.1187J.不考虑路面不平度的影响,优化后驾驶室系统在工况n =500,750,1000r m in 时的振动能量分别为T =0.07209,0.1221,0.1576J.比较各表可以看出,各阶的能量解耦程度有很大的提高,特别是z 向和Ηx 向的解耦程度分别从优化前的96.0%,39.7%提高到优化后的99.7%,88.3%,优化后的固有频率都在要求范围内.驾驶室的振动能量在3种工况下分别降低了19.36%,30.3%,32.75%,而如果不考虑路面不平度的影响,驾驶室的振动能量在3种工况下只分别降低了9.54%,18.6%,22.06%,充分说明了用本方法优化发动机悬置参数具有更实用价值.现实中,虽然路面质量不断提高,但不平度总是存在的,优化发动机悬置要同时考虑发动机振动和路面不平度激励,本文将发动机悬置系统与整车其它子系统联系起来,并同时考虑汽车在不同运行工况和不同路面上所受到的激励,因此更接近于实际,应用本方法优化发动机悬置参数,更能有效地降低汽车的振动.参考文献1 T i m per F F.D esign considerati on in engine mounting .SA E,1965,69(6):1~52 Grede C E.V ibrati on and shock iso lati on .N ew Yo rk:John and Sons Inc,19793 喻惠然,王长青,赵化民.CA 6102型发动机悬置的研究.汽车技术,1992,(1):18~254 孙蓓蓓.汽车发动机悬置系统解耦方法研究.振动工程学报,1994,7(3):240~2455 Geck P E ,Patton R D .F ront w heel drive engine mount op ti m izati on .SA E ,1984,88(7):123~1346 Stephen R Johnson .Computer op ti m izati on of engine mounting system .SA E ,1979,83(9):19~267 钱振为,徐石安,陈立民.汽车发动机悬置系统结构动态参数的选择与子系统之间的匹配.汽车工程,1988,10(4):56~648 徐志生.汽车理论.北京:机械工业出版社,1981.195~1989 张洪欣,王秉刚.四轮随机输入下的汽车振动的计算机模拟.汽车技术,1985,(4):27~30;(5):9~1510 孙庆鸿,孙蓓蓓,张启军等.振动能量最小的汽车发动机悬置系统优化设计,东南大学学学报,1995,11(6A ):7~11901第6A 期温任林等:汽车发动机悬置系统多目标优化的研究011东 南 大 学 学 报第26卷Study on M ulti-Object Opti m ization ofEng i ne M oun ti ng SystemW en R en lin Zhong B inglin Yan J ingp ing(D epartm ent of M echanical Engineering,Southeast U niversity,N anjing210018)Abstract: A m u lti2ob ject op ti m izati on m odel is p ropo sed w ith resp ect to the com p leted ve2 h icle,w h ich takes the vib rati on energy of driving2cab and decoup led energy of engine m oun t2 ing system as general ob ject.T he op ti m izati on values are given.A n exam p le show s vib rati on of au tom ob ile can be reduced effectively by choo sing p rop er p aram eters of engine m oun ting system.Key words: engine m oun ting system;vib rati on con tro l;op ti m um design。
重载汽车动力学性能多目标优化分析

重载汽车动力学性能多目标优化分析张景梅;崔素华【摘要】以三轴重载汽车为例,以影响其动力学性能的悬架参数优化为目的,在随机路面激励的作用下,构建了三点虚拟激励模型,通过建立三轴重载车的六自由度模型,利用虚拟激励法得出驾驶室座椅均方根值表达式,并以加权的加速度均方根值作为平顺性的评价指标;建立汽车转弯运动力学模型,得出侧倾稳定性因数与悬架的侧倾特性和由路面随机激励所产生的动载荷之间的关系,确定以稳定性因数作为汽车侧倾运动的稳定性评价指标;将整车的95百分位四次幂合力作为道路友好性的评价指标.根据悬架刚度和阻尼与各性能评价指标之间的关系,基于Isight软件,运用遗传算法NSGA-II实现了汽车的平顺性、稳定性和道路友好性的多目标综合优化,从而得出了悬架刚度和阻尼的最佳匹配值.该思路对于多轴重载车的参数设计具有参考价值.【期刊名称】《北京交通大学学报》【年(卷),期】2018(042)003【总页数】7页(P120-126)【关键词】重载汽车;多目标优化;评价指标;稳定性因数;平顺性;道路友好性【作者】张景梅;崔素华【作者单位】北京交通大学机械与电子控制工程学院,北京 100044;河北科技大学机械电子工程学院,石家庄 050081;河北科技大学机械电子工程学院,石家庄050081【正文语种】中文【中图分类】U461.1;U463.33随着我国经济的不断发展,货物运输行业对道路交通运输能力的需求也越来越大,道路修筑技术及路面平整度不断得到提高,载货汽车的性能也相应提高,基于汽车行驶平顺性、操纵稳定性、道路友好性的参数优化研究早已得到国内外研究人员的极大关注.文献[1]提出对于复杂多体柔性系统的仿真引入有限元和模态叠加法,应用有限差分法传感器得到了汽车平顺性参数的最优化结果;文献[2]基于梯度信息的近似优化方法,以及平顺性和操纵稳定性,对车辆悬架系统参数进行了高效优化;文献[3]通过分析车速、轴距、悬架刚度、阻尼等对路面损伤的影响,得出道路破坏系数对于悬架刚度和阻尼极为敏感;文献[4]针对平顺性与操纵稳定性的相互影响机理进行分析;文献[5]兼顾行驶平顺性和道路友好性建立了载货车的悬架参数优化模型,对悬架参数进行了优化分析;文献[6]为改善某商用车的平顺性和道路友好性,对悬架刚度和阻尼进行了优化;综合国内外汽车平顺性、操纵稳定性与道路友好性及车辆性能参数优化研究现状,尽管学者们做了大量研究,但在车辆—路面相互作用的研究中仍存在不足:其研究内容多为车辆平顺性或操纵稳定性与道路损伤相结合[7],尤其是关于载货车稳定性与路面损伤相互关系的研究极为少见.且研究结果多是通过分析优化相关参数后,平顺性或操纵稳定性得到了一定的改善,但随着公路的高速化、重载化,提高重载汽车整体性能,延长汽车零部件寿命,减少道路损伤维修费用为目的的基于道路友好性的整车动力学综合性能研究是一个值得探讨的重大课题,因此对于汽车的主要动力学性能平顺性和稳定性兼顾道路友好性的综合性研究分析,尤其是对与3方面性能均有密切关系的汽车悬架参数的优化分析,在汽车产业具有重要的理论意义和工程应用价值.在汽车动力学研究和路面动力学研究中,路面的不平整引起车辆的振动,车辆的振动又反作用于路面,激励输入模型能否准确地反映实际研究的路面对汽车性能分析研究的准确性有着极其重要的影响,目前对于路面随机激励模型的构建常用理论模拟法,针对路面不平度的理论模拟法国内外学者进行了大量的研究和验证,模拟方法主要有滤波白噪声法[8]、谐波叠加法[9]、AR或ARMA模型[10]等,滤波白噪声法和谐波叠加法主要适宜单轮路面激励的时域分析,且计算量大;AR或ARMA 模型对于路面不平度的检测数据有限.因此,建立合理的路面模型对车辆动力学性能研究至关重要.本文作者以三轴重载车DFL1250A9为例,分别建立其平顺性仿真半车模型和稳定性动力学分析模型,构建B级路面的三点虚拟随机激励模型,针对重载车在转弯工况下不同的行驶力学性能——平顺性和侧倾稳定性,指出悬架参数与道路友好性评价指标、侧倾稳定性评价指标、平顺性评价指标之间的关系,对重载汽车侧倾稳定性、平顺性基于道路友好性进行了多目标优化分析.1 载货车动力学模型1.1 重载汽车动力学半车模型汽车行驶中会受到纵向、垂向和横向3个方向的输入,各方向所表现出来的运动响应特性必然是相互作用、相互耦合的.在匀速转弯运动的工况下,车厢产生侧倾,对于25 t重载车的承载量主要集中于货厢,由侧倾产生的垂向耦合运动对于驾乘人员的垂向舒适度影响可忽略不计,故在平顺性模型建立时,只考虑汽车的垂向运动和俯仰运动.首先对复杂的整车系统进行适当简化和假设:1) 车辆对称于纵向对称面,左右轮胎对应的路面不平度相同;2) 假设路面的不平度为符合正态分布的各态历经平稳随机过程,同侧前、中、后各个轮胎对应的路面不平度不相同,而且存在由轴距引起的响应时滞;3) 轮胎刚度、座椅刚度简化为线性函数;悬架阻尼为速度的线性函数;4) 各轮胎与地面单点接触,无弹跳;路面激励作用在轮胎与路面的接触中心点上.将三轴重载汽车系统近似线性化为一半简化模型,前、中、后轮受到3个随机输入,受力图见图1.图1中各参数设置如下:mb为驾驶室质量为车体质量;mc为平衡杆的质量;Ib、Ic分别为车体和平衡杆俯仰转动惯量;mf、mrm、mrr分别为前悬架、平衡悬架前桥、平衡悬架后桥的非簧载质量;Kc1、Kc2分别为驾驶室的前悬置刚度和后悬置刚度;Cc1、Cc2分别为驾驶室的前悬置阻尼和后悬置阻尼;Kf、Cf分别为转向悬架钢板弹簧刚度和减振器阻尼;Kr、Cr分别为平衡悬架钢板弹簧刚度和减振器阻尼;Ktf、Ctf分别为转向悬架轮胎的刚度和阻尼;Krm、Crm分别为平衡悬架处中桥轮胎的刚度和阻尼;Ktr、Ctr分别为平衡悬架处后桥轮胎的刚度和阻尼;qf、qm、qr分别为分别为转向悬架轮胎、平衡悬架中桥、后桥轮胎垂向位移激励. 根据达朗伯原理建立六自由度的振动运动微分方程(1)式中:Z=[Z1,Zb,Zc,Zs,θb,θc]T;,b,c,s,b,c]T;Zs、Zb、Z1、Zc分别为驾驶室座椅、车体、前桥、平衡悬架中后桥垂向振动位移;θb、θc分别为车体与平衡悬架中平衡杆的俯仰振动位移;M为质量矩阵;C为系统阻尼矩阵;K为系统刚度矩阵;Cq为路面激励阻尼;Kq为路面激励刚度;Q为路面激励位移.图1 三轴重载车六自由度模型Fig.1 6 DOF model of three axle heavy vehicle 利用文献[11],由式(1)可得到频域范围内的6个频响函数的线性非齐次方程组A6×6×[H1(w)H2wH3wH4wH5wH6(w)]T=[Q1w 0 Q3w 0 Q5w 0]T(2)A6×6为各响应频率响应的系数矩阵,经验证它的秩与其增广矩阵B6×7的秩相等,故方程组有解.后面为书写简单省略自变量w.式中H1、H2、H3、H4、H5、H6]T 对应6个振动响应相对前轮胎随机激励输入的频响函数向量、、、、、T.可求得座椅加速度的频响函数1.2 操纵稳定性模型汽车行驶过程中的操纵稳定性主要包含纵向稳定性和侧向稳定性.纵向稳定性失控主要体现在坡道上纵向行驶时,对于汽车的侧向稳定性,主要表现为汽车的横向滑移或侧翻.当汽车在匀速转弯时产生侧倾运动,车厢的倾斜使悬挂系统发生侧向变形.将整车模型简化为只有绕z轴的横向摆动和沿y轴的侧向运动的二自由度系统见图2.建立汽车侧倾动力学模型即侧倾稳定性因数与悬架的侧倾特性和由路面随机激励所产生的动载荷之间的关系.图2 三轴载重车二自由度模型Fig.2 2 DOF model of three axle vehicle图2中:a1、a2、a3分别为3个轮胎的侧偏角;β为汽车质心的侧偏角;δ为前轮转角;ωr为汽车横摆角速度;m为整车质量;Iz为汽车绕z轴的转动惯量;L1为中后轴的轴距;L2、L3分别为中轴和前轴距汽车质心的距离;u、v分别为汽车质心的绝对速度V在y轴和x轴的分量,v即汽车行驶速度.在前轮角输入下,暂时忽略悬架的影响,假设汽车的垂向位移、侧向位移均为零,只考虑汽车水平的平面运动,建立系统的微分方程如下k1+k2+k3β+×ωr-k1δ(3)L3k1-L2k2-(L1+L2)k3β+×ωr-L3k1δ=Izr(4)汽车作等速圆周运动时,r=0,=0.可求得汽车的转向灵敏度γ=ωr/δ.ki(i=1,2,3)为前、中、后轮的侧偏刚度.下标1、2、3表示前、中和后轮.由式(3)和式(4)可求得稳定性因数为(5)可知轮胎的侧偏刚度Ki影响Kw的值.根据文献[12],知轮胎侧偏刚度又与轮胎的垂直载荷有着密切的关系,其关系式如下kil(r)=0.067782-9..129(6)式中:为前、中、后三轴的轮胎载荷;下标字母l、r表示左、右.ΔFzil(r)+Fid,i=1,2,3(7)式中:Fzil(r)为静止时前、中、后轴的左(右)轮胎的地面垂直反作用力.垂向载荷的变动量包含两部分:由于路面随机激励在三轴上产生的动载荷Fid和前、中、后三轴左(右)轮胎由于离心力而产生垂直反力的变动量ΔFzfl(r).于是得到改进的稳定性因数为Kl(r)=(8)2 三点路面随机虚拟激励模型本文中的三轴重载车,所受路面激励属于多点激励,由于较大的轴距导致3个轮胎所受异相位的平稳迟滞路面激励,以B级路面工况为例,在频域范围内建立路面模型.假定前、中、后轮受到相同相干平稳的路面激励,建立路面的3个激励点为(9)可把Q(t)视为广义的单点激励,假设Q(t)的自功率谱密度为已知常数,前、中、后轮受到激励的时刻分别为t1、t2、t3,应用虚拟激励法得到三点虚拟激励模型为(10)式中:f、m、r分别为前、中、后轮所受虚拟激励.3 动力学性能评价指标3.1 平顺性评价指标根据GB/T 4970—2009《汽车平顺性试验方法》利用座椅传递给人体加速度确定对应的加权加速度均方根值作为平顺性的评价指标,本文采用驾驶室座椅垂向加速度代替人体加速度进行分析.以驾驶室座椅垂向振动的加权加速度均方根值作为平顺性的评价指标,则有(11)式中:Wzsw 为加权函数,此处为1;为前轴路面激励输入的功率谱密度;为驾驶室座椅垂向加速度频响函数.3.2 操纵稳定性评价指标汽车的操纵稳定性涉及内容广泛,用于表征汽车侧倾操纵稳定性的主要是汽车曲线行驶时的时频响应特性.在汽车等速转弯行驶工况下,用稳态时的横摆角速度与前轮转动角度的比值作为汽车在等速行驶下响应的评价标准.而稳态因数的数值表征汽车的稳态响应,通常关于汽车转弯时稳态响应的研究分析中,只考虑汽车结构参数的影响,在此引入了路面随机激励产生的动载影响和悬架刚度及阻尼的影响,并得到了改进的稳定性因数,使得对汽车稳定性研究趋于准确化.在此将式(7)中改进的稳态因数Kl(r)作为侧倾时操纵稳定性的评价指标.3.3 道路友好性评价指标评价道路友好性的指标主要有:动态载荷系数、道路应力因子和95百分位四次幂合力、全概率损伤及加权集合力等.动态载荷系数只能粗略反映动载荷与道路损伤的关系;道路应力因子没有考虑到动载荷的空间重复性;为了全面地反映车辆对道路损伤的实际情况,提高车辆对路面损伤程度的准确度.Cole和Cebon在四次幂定律的基础上,把各车轮动载荷的四次幂叠加[13-14],得到“95百分位四次幂合力”.故将“95百分位四次幂合力”作为在道路的友好性的评价指标,计算公式为Φ=η1fη2fη3fFf-stat4+η1mη2mη3mFm-stat4+η1rη2rη3rFr-stat4=1.1×1+1.645DfFf4+0.9×1.1×1+1.645DmFm4+[0.9×1.1×1+1.645DrFr]4(12)式中:η1i为前、中、后轮胎布置影响系数,本例中的中、后桥为并装双轴,且单侧为双轮,所以η11取1.0,η12、η13均取0.9[15].对于轮胎充气压力影响系数η2i,本例实际车辆的轮胎11.R20胎压约为0.88 MPa,在此取ηi均为1.1[15];D为载荷系数.汽车侧倾时,左、右轮胎的载荷及动载系数发生了变化,左、右轮胎95百分位四次幂合力不再保持无侧倾时理论上的一致性.且汽车左、右侧轮胎产生的动载荷均由侧倾造成的载荷变化量和路面不平度导致的动载荷两部分组成.于是可分别求得汽车产生侧倾后左、右侧轮胎的95百分位四次幂合力,则整车95百分位四次幂合力为左、右侧轮胎载荷95百分位四次幂合力之和.4 悬架参数多目标优化与结果分析由于车辆在行驶过程中速度和路面条件等因素经常变化,优化时设定的行驶工况为:三轴重载车在转弯半径为50 m的B级弯曲路面上以30 km/h的速度匀速行驶. 4.1 优化目标为同时满足平顺性和操纵稳定性的要求,并尽可能减轻对路面的损伤,以函数驾驶室座椅处的垂向振动加速度均方根值、道路友好性95百分位四次幂合力min φ和操纵稳定性因数Kw>0,即降低驾驶员座椅处的垂向振动加速度的均方根值、减少对道路的损伤和稳态运动达到不足转向为优化目标.4.2 选定设计变量由式(8)、式(11)、式(12)可知,汽车的平顺性和侧倾稳定性,道路友好性都与悬架参数有着密切的联系,于是选择前、后悬架的刚度和阻尼为优化分析的设计变量,即X=[KrCrKfCf]T(13)4.3 约束条件1)对于货车平衡悬架的静挠度为fc=50~110 mm,于是本文中平衡悬架的刚度极限约束为Mbg/0.11≤Kr≤Mbg/0.05.式中Mb为簧载质量,m;g为重力加速度,N·m.2)平衡悬架的阻尼系数一般选择Cr=2ζ,式中ζ相对阻尼系数,对于有摩擦的钢板弹簧,ζ的值可选小一些,根据实际和经验可选0≤ζ≤0.2.3)对于前悬架刚度可根据偏频确定,前悬满载偏频范围为1. 50~2. 10 Hz[15].4)悬架动挠度的量值在优化中也要保证,对于载货车,平衡悬架的动挠度fd最大取值范围为60~90 mm[16].这里取最小值60 mm为上限值.所有约束量及约束范围具体见表1.表1 约束量及约束范围Tab.1 Constraint variables and constraints极限值Kr/(N/m)Cr/(N·s/m)Kf/(N/m)Cf/(N·s/m)fd/ mm上限值2 304 60032 600370 00060 0000.06下限值1 047 55021 800168 00025 00004.4 优化结果分析应用Isight软件,选择多目标遗传算法NSGA-II,设置算法种群个体数为32,进化100代,交叉概率为0.9.三轴载重车平顺性、操纵稳定性及道路友好性的多目标优化平台建立.经过优化得到设计变量的Pareto最优解集(蓝色被圈区域),以及其在目标函数空间中的映射Pareto前沿见图3和图4.(a)目标函数道路友好性空间下(b)目标函数座椅加速度均方根值空间下(c)目标函数稳定性因数空间下图3 前悬架刚度和阻尼的Pareto最优解集Fig.3 Pareto optimal solution set for stiffness and damping of the front suspension由图3(a)看出,在95百分位四次幂合力Pareto最优解对前悬架刚度的变化敏感程度较小,随着前悬架阻尼的减小而减小,即车辆较小的前悬架阻尼的减小引起动载荷变小,从而车辆对于道路的损伤程度减弱.图3(b)表明兼顾车辆的平顺性,前悬架刚度和阻尼的Pareto最优解集在刚度大约300 000 N/m、阻尼接近20 000 N·s/m时的范围内.由图3(c)知在前悬架刚度和阻尼较大时,稳定性因数大于0,此时车辆具有较好的不足转向特性,稳定性较好.(a)目标函数道路友好性空间下(b)目标函数驾驶室座椅垂向加速度均方根值空间下(c)目标函数稳定性因数空间下图4 平衡悬架刚度和阻尼的Pareto最优解集Fig.4 Pareto optimal solution set for equilibrium suspension stiffness and damping图4(a)中平衡悬架刚度和阻尼的变动对于95百分位四次幂合力的影响处于不稳定状况,平衡悬架刚度和阻尼均处于极端时,道路所受到的破坏力较大,所以兼顾道路的友好性,平衡悬架的刚度和阻尼不宜最大或最小.同样平衡悬架的刚度和阻尼处于极值时,数值越大,车辆行驶的平顺性越差,需要一个适中的数值.图4(c)中,车辆侧倾时的稳定性因数在平衡悬架的刚度较大时,数值较小,具有较好的不足转向特性,而对于阻尼的影响不是很明显.根据以上分析,基于道路的友好性,车辆要达到较好的舒适性和侧倾稳定性,悬架参数需要一组适中的值.表2列出了设计变量优化前后的数据.表2 设计变量初始值与优化值Tab.2 Initial value and optimal value of design variables设计变量优化前优化后Cf/(N·s/m)50 63648 795Cr/(N·s/m)25 32021 804Kf/(N/m)251 380269 893Kr/(N/m)2 604 0002 995 104表2中数据表明,在优化之后悬架参数都有了一定的变化,前悬架阻尼比优化前降低了3.64%,前悬架刚度比优化前提高了7.36%;平衡悬架的刚度比优化前提高了15.02%,平衡悬架阻尼比优化前减小了13.89%,这与前面对于设计变量收敛过程分析的结论相一致.在表内优化后悬架参数的匹配下,当道路友好性最好时,该车的平顺性和操纵稳定性达到最佳状态.优化后目标函数的结果如表3所示.由表3可见,前后悬架刚度和阻尼优化匹配后,驾驶室座椅垂向加速度均方根值降低了约7%,内侧轮胎稳定性因数增大了约4.78%,外侧轮胎稳定性因数增大了约4.31%,道路友好性指标95百分位四次幂合力减小了约12.6%,使汽车的平顺性、操纵稳定性和道路友好性均有所提高.优化后目标函数的数值与表1中预定的目标函数的约束范围均满足,故此次优化达到了预期效果.整个优化过程与思路为实际工程中汽车设计提供参考.表3 目标函数的优化比较Tab.3 Comparison of optimization results of the objective function目标函数优化前优化后座椅垂向加速度均方根值/(m/s2)0.023 70.022 0内侧轮胎稳定性因数×10-2/(s2/m2)2.985 33.128 0外侧轮胎稳定性因数×10-2/(s2/m2)2.985 33.114 095百分位四次幂和力×1016/(N4)2.28321.995 95 结论1)提出三轴重载汽车三点路面虚拟激励模型,针对具有较大轴距的三轴轮胎上在受异相位的平稳迟滞路面激励时,该模型的提出使平顺性和侧倾稳定性结果的复杂推导过程简单化,该模型的建立为多轴重载车的动力学研究提供了一条捷径.2)在重载汽车侧倾稳定性研究中,由于载重量较大,悬架的刚度和阻尼、路面不平度对于侧倾稳定性有着较大影响,在悬架的侧倾力矩和轮胎侧偏刚度的计算中,既考虑悬架的刚度和阻尼,又引入路面随机激励所产生的动载影响,建立了改进的三轴重载车匀速转弯行驶时的稳定性因数,弥补了对稳定性因数的以往研究中仅仅只考虑悬架刚度的不足,使对于车辆侧倾稳定性的分析更趋于准确化.3)提出了将前、后悬架的刚度和阻尼作为多目标优化分析的设计参量,对载重车的平顺性、侧倾稳定性和道路友好性三方面性能进行了综合优化的思路,通过设计参量、优化目标函数在优化前后的结果对比,得出了前、后悬架参数的最佳匹配,基于道路友好性,汽车的平顺性和侧倾稳定性得到了较好的改善.本文的优化分析思路对多轴载货汽车的性能研究和参数设计、路面的改进、提高车辆行驶的安全性等方面具有重要的理论参考和工程应用价值.参考文献(References):【相关文献】[1] GONCALVES J P C,AMBROSIO J A C.Optimization of vehicle suspension systems for improved comfort of road vehicles using flexible multi-body dynamics[C]//4th Symposium on Multi-body Dynamics and Vibration.Chicago,2003.[2] THORESSON M J, UYS P E, ELS J A S. Efficient optimization of a vehicle suspension system, using a gradient-based approximation method, Part 2: optimization results[J]. Mathematical and Computer Modeling,2009(50):1437-1447.[3] GERTLER J J. Survey of model-based failure detection and isolation in complex plants[J].IEEE Control Systems Magazine,1998(12):3-11.[4] 王维.汽车平顺性与操纵稳定性协同研究与仿真实现[D].吉林:吉林大学,2016. WANG Wei. Cooperative research and simulation realization of automobile ride comfort and handling stability[D].Jilin: Jilin University,2016. (in Chinese)[5] 车华军,陈南,殷国栋.基于操纵稳定性的车辆悬架性能参数稳健设计方法[J].汽车工程,2009,31(4):371-375. CHE Huajun,CHEN Nan,YIN Guodong. Robust design of suspension performance parameters for vehicle handling and stability[J]. Automotive Engineering, 2009,31(4):371-375. (in Chinese)[6] 张志飞,刘建利,徐中明.面向平顺性与道路友好性的商用车悬架参数优化[J].汽车工程,2014,36(7):889-893. ZHANG Zhifei,LIU Jianli, XU Zhongming. Optimization of suspension parameters for commercial vehicle based on ride comfort and road friendliness[J]. Automotive Engineering,2014,36(7):889-893. (in Chinese)[7] 宋康,陈潇凯,林逸.汽车行驶动力学性能的多目标优化[J].吉林大学学报(工学版),2015,45(2):352-357. SONG Kang, CHEN Xiaokai, LIN Yi. Multi-objective optimization of vehicle dynamic performance[J]. Journal of Jilin University(Engineering Edition),2014,45(2):352-357.(in Chinese)[8] 卢凡.陈思忠.汽车路面激励的时域建模与仿真[J].汽车工程,2015,37(5):549-553. LU Fan,CHEN Sizhong. Modeling and simulation of road surface excitation on vehicle in time domain [J].Automobile Engineering, 2015,37(5):549-553.(in Chinese)[9] 王红岩,王钦龙,芮强,等.车辆行驶路面的数字化建模方法研究[J].兵工学报,2016,37(7):1153-1159. WANG Hongyan, WANG Qinlong,RUI Qiang, et al. Research on digitized modeling method of riding road of vehicle [J].Acta Armamentarii, 2016,37(7):1153-1159.(in Chinese) [10] 唐光武,程思远.双轮辙路面激励的时域AR和ARMA模型及计算机仿真[J].公路交通科技,1999(4):58-59. TANG Guangwu, CHENG Siyuan. Time domain AR and ARMA model and computer simulation of double track road excitation[J].Journal of Highway and Transportation Research and Development, 1999(4):58-59. (in Chinese)[11] 林家浩,张亚辉.随机振动的虚拟激励法[M].北京:科学出版社,2004:42-57. LIN Jiahao, ZHANG Yahui. Pseudo excitation method for random vibration[M]. Beijing:Science Press,2004:42-57.(in Chinese)[12] 唐玉福.混凝土搅拌车静态侧倾稳定角计算方法探究[J].专用汽车,2015,1(1):90-92. TANG Yufu. Research on calculation method of static roll stability angle of concrete mixer[J]. Special Purpose Vehicle, 2015,1(1):90-92. (in Chinese)[13] COLE D J, CEBON D. Truck suspension design to minimize road damage[J].Procnstn Mech Engrs,1996, 201(1):95-106.[14] LIEH J. Semiactive damping control of vibrations in automobiles[J]. Journal of Vibration & Acoustics, 1993, 115(3): 340-343.[15] 余卓平,黄锡鹏,张洪欣.减轻重型汽车对道路的损伤_汽车悬架优化设计[J].中国公路学报,1994,7(3):83-87. YU Zhuoping,HUANG Xipeng, ZANG Hongxin.The alleviation of damage to road by heavy vehicle-optimization design of vehicle suspension[J].China Journal of Highway and Transport,1994,7(3):83-87. (in Chinese)[16] 王望予.汽车设计[M].4版.北京:机械工业出版社,2004:133-160. WANGWangyu.Automotive design[M].4th ed.Beijing:China Machine Press,2004:133-160.(in Chinese)[17] 王宵峰.汽车底盘设计[M].北京:清华大学出版社, 2010. WANG Xiaofeng. Automotive chassis design[M]. Beijing: Tsinghua University Press, 2010. (in Chinese)。
汽车动力总成悬置系统的多目标优化方法
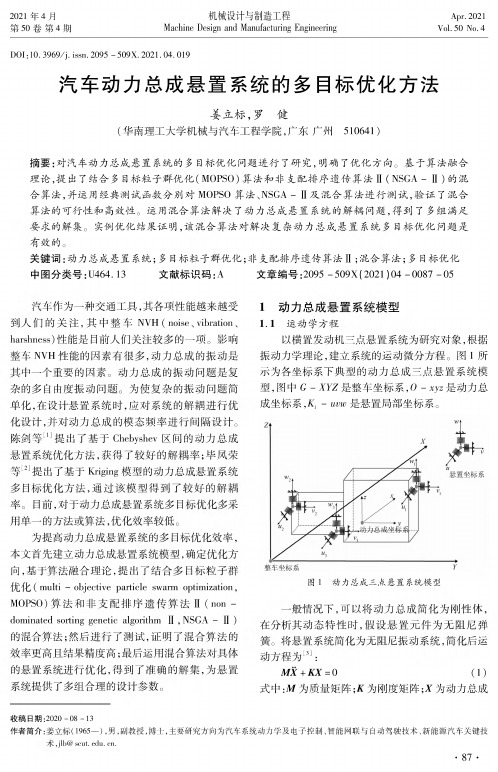
机械设计与制造工程Machine Design and Manufacturing Enginee/ng 2021年4月第50卷第4期Apr. 2021Vol. 50 No. 4DOI : 10. 3969/j. issn. 2095 - 509X. 2021.04. 019汽车动力总成悬置系统的多目标优化方法姜立标,罗健(华南理工大学机械与汽车工程学院,广东广州510641)摘要:对汽车动力总成悬置系统的多目标优化问题进行了研究,明确了优化方向。
基于算法融合理论,提出了结合多目标粒子群优化(MOPSO )算法和非支配排序遗传算法'% NSGA -')的混合算法,并运用经典测试函数分别对MOPSO 算法、NSGA -'及混合算法进行测试,验证了混合算法的可行性和高效性。
运用混合算法解决了动力总成悬置系统的解耦问题,得 了多组满足的解集。
实例优化结果证明,该 合算法对解决复杂动力总成多目标优化问题是有效的。
关键词:动力总成悬置系统;多目标粒子群优化;非支配排序遗传算法';混合算法;多目标优化中图分类号:U464. 13 文献标识码:A 文章编号:2095 -509X ( 2021)04 -0087 -05车作为交通工具,其各项性能越来越受到人们的关注,其中整车NVH (noise 、vibration 、harshnes )性能是目前人们的一项。
影响车NVH 性能的因素,动力总成的振动是中一个重要的因素。
动力总成的振动 复杂的多自由度振动。
为使复杂的振动:简单化,在设计悬置系统时,应对系统的解耦,对动力总成的模态频率%陈剑等'1(提出了基于Chebyshev 区间的动力总成悬置,获得的率;毕凤荣等'2(提出了基于K/ging 模型的动力总成悬置系统目 ,通过 得的 !率。
目,对于动力总成悬置系统多目用单一的, 率 。
为提高动力总成悬置的多目标优化效率,本文首先建立动力总成悬置 ,确向,基融合理论,提出 目标粒优化"multi - objective particle swam optimization ,MOPSO )算法和非 排序'(non -dominated sorting genetic algorithm ',NSGA -')的混合算法;然后 测试, 混合算法的 率更高度高;最后运用混 对具体的悬置, 得的 , 为悬置提供 组合理的参数。
重载车辆空气悬架系统特性分析与优化设计研究

重载车辆空气悬架系统特性分析与优化设计研究近年来,随着交通运输业的快速发展,重载车辆的出现越来越多。
为了应对不同路况和运输任务的需要,重载车辆需要搭载一系列配套设施,其中空气悬架系统是必不可少的一部分。
空气悬架系统通过改变车辆悬挂系统的弹簧刚度和减震特性,使其适应不同的路况和载荷条件,提高车辆的稳定性和舒适性。
本文旨在分析重载车辆空气悬架系统的特性,并提出优化设计方案,以提高其运行效率和经济性。
一、重载车辆空气悬架系统的基本原理和结构空气悬架系统是一种基于压缩空气作为传动介质的悬架系统,其工作原理主要包括气压调节和气体流动控制两个方面。
在气压调节方面,通过控制空气悬架系统中的气压大小,使车辆悬挂系统的弹簧刚度和减震特性在不同的路况和载荷条件下具备适应性。
在气体流动控制方面,通过流量控制阀等设计在空气悬架系统中进行气体流动的方式,来实现车辆悬挂系统的调控和控制。
重载车辆空气悬架系统的结构主要包括悬架气囊、气泵、气压调节器和控制系统等组成部分。
悬架气囊是空气悬架系统的核心部件,通过改变气囊内部的气压,来改变车辆的悬挂高度和弹簧刚度。
气泵是空气悬架系统中的另一重要部件,其作用是将空气从外部吸入系统内部,并通过气压调节器对气压进行调节。
气压调节器是空气悬架系统中的一个关键组成部分,通过对气压进行调节,来改变车辆的悬挂高度和弹簧刚度。
控制系统是空气悬架系统的控制中心,通过接收车辆姿态信息和载荷信息,来对气压进行调节和控制,实现车辆的稳定性和舒适性。
二、重载车辆空气悬架系统的特性分析重载车辆空气悬架系统的特性主要体现在以下几个方面:1.弹簧刚度和减震特性可调性较强由于空气悬架系统可通过气压调节来改变车辆悬挂系统的弹簧刚度和减震特性,因此其适应性和可调性较强。
在不同路况和载荷条件下,通过对气压进行调节,可以使车辆悬挂系统的弹簧刚度和减震特性发生相应的变化,从而保证车辆的运行稳定性和舒适性。
2.稳定性和安全性较高重载车辆空气悬架系统能够根据道路状况、车速、车载货物等信息来对气压进行调节,从而使车辆在运行过程中保持较稳定的悬挂高度和前后重量分布比例,保障行车安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a l g o r i t h m( MO G A)w a s p r o p o s e d a n d a p p l i e d t o o p t i m i z e t h e s u s p e n s i o n p a r a m e t e r s o f h e a v y v e h i c l e .C o m p a i r n g w i t h t h e
PANG Hu , PENG We . YUAN Y u a n
( S c h o o l o f M e c h a n i c a l a n d P r e c i s i o n I n s t r u m e n t E n g i n e e r i n g ,X i ’ a n U n i v e r s i t y o f T e c h n o l o g y , X i ’ a n 7 1 0 0 4 8 ,C h i n a )
w a s u s e d t o s o l v e t h e mu l t i — o b j e c t i v e o p t i m i z a t i o n p r o b l e m. B e s i d e s ,a n i m p r o v e d a d a p t i v e mu l t i — o b j e c t i v e g e n e t i c
s h o wn t h a t b y u s i n g t h e me t h o d p r o p o s e d t h e r i d i n g s t a b i l i t y i s e n h a n s e d a n d t h e d y n a mi c t i r e l o a d o n g r o u n d i s r e提高车辆行驶平顺性、 减小轮胎对路面的动载荷, 以某重载车辆空气悬架系统为研究对象, 建立四自由
度1 / 2车辆多 目标优化模型 , 提 出改进的多 目标 自适应遗传算 法对悬架参数 进行优化 。与一般遗传 算法相 比 , 车身垂 向 加速度 、 前后轮动载荷有效值约减小 1 0 %, 目标函数值改善度降低 5 7 . 0 3 % 。该方法不仅能提高车辆行驶 稳定性 , 且可减
p n e u ma t i c s us pe n s i o n mo d e l wi t h i n a ha l f v e hi c l e mo d e l wa s e s t a b l i s h e d.Ba s e d o n t he mo de l ,a g e n e r a l g e n e t i c a l g o it r h m
c o n v e n t i o n a l a l g o r i t h m ,t h e e f f e c t i v e v a l u e o f t h e v e hi c l e b o d y ’ S v e r t i c a l a c c e l e r a t i o n a nd t h e ro f n t / r e a r — wh e e l d y n a mi c
振
第3 3卷 第 6期
动
与
冲
击
J OURNAL OF VI B RAT I ON AND S HOC K
随机 激 励 下重 载 车辆 空气悬 架 参 数 多 目标优 化
庞 辉, 彭 威, 原 园
( 西安理工大学 机械与精密仪器工程学院 , 西安 7 1 0 0 4 8 )
l o a d d e c r e a s e b y 1 0 % ,a n d t h e i mp r o v e m e n t d e g r e e o f o b j e c t i v e f u n c t i o n v a l u e d e c r e a s e s r e ma r k a b l y b y 5 7 . 0 3 %.I t i s
Ab s t r a c t : I n o r d e r t o i mp r o v e t h e v e h i c l e id r i n g c o mf o r t a n d d e c r e a s e t h e d y n a mi c t i r e l o a d o n r o a d,a 4 一 DOF
Mu l t i - o b j e c t i v e o p t i mi z a t i o n o f p n e u ma t i c s u s p e n s i o n
pa r a me t e r s f o r he a v y v e hi c l e un de r r a nd o m e x c i t a t i o n