单片机温度控制系统电路原理图
51单片机+ds1302+DS18b20温度时钟(电路图+C语言程序)
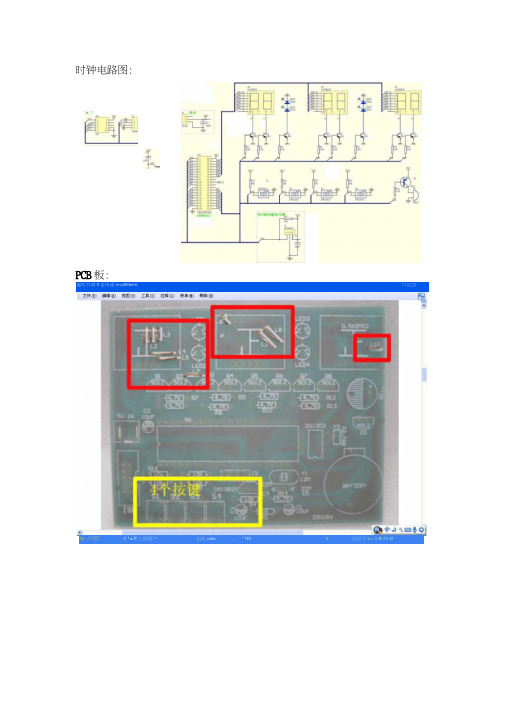
时钟电路图:*■11PCB板:酱时井務ft是用诵m-pdfMerisi 口叵因Fjr 齐舱 C :s ® 工细理沖缶皿ndm - * TfS ' 4' 包田U i > 'ir ft ZS:MZ fH钟些fl是用说町-Pdf Wirrcf闻礒雜sbit dis_ bitlsbit dis_ bit2sbit dis_ bit3sbit dis_ bit4sbit dis_ bit5sbit dis_ bit6sbit ledl _bitsbit led2 ! bit=P2A7; II定义数码管控制口=P2A6; II定义数码管控制口=卩2八4; II定义数码管控制口=卩2八3; II定义数码管控制口=P2A1; II定义数码管控制口=P2A0; II定义数码管控制口=P2A2; II定时LED勺控制口=P2A5; II定时LED勺控制口单片机程序:/*===================================================================调试要求:1. MCU:AT89S52 芯片或AT89C522. 晶振:12MHz功能:多功能时钟+温度计/#inelude <reg52. h>#inelude vintrins . h>訂开始 LJ-雲匕®务如1痒3月计ttVl. •呈T』d"吐拠席射■ w耳pg文宇■[豹…SS时軽件思冃说#define uehar #define uint unsigned char unsigned intsbit s1_bit =P1A 0; // 定义S1 控制口 sbit s2_bit =P01; // 定义 S2控制口 sbit s3_bit =P02; // 定义 S3控制口 sbit dq_ds18b20 =P3A3;// 定义控制 DS18B20 sbit speak =P3A7; //定义蜂鸣器控制口sbit clk_ds1302 =P3A6; // 定义控制 DS1302勺时钟线 sbit io_ds1302 =P3A5;//定义控制DS1302勺串行数据 sbit rest_ds1302 =P3A4;#define smg_data P0 //定义数码管数据口void delay_3us(); //3US 的延时程序 void delay_8us(ui nt t);//8US 延时基准程序void delay_50us(ui nt t); //void display1(uchar dis_data); void display2(uchar dis_data); void display3(uchar dis_data); void display4(uchar dis_data); void display5(uchar dis_data); void display6(uchar dis_data);void init_t0(); //定时器0初始化函数 void dis_led(); //LED 处理函数 void judge_s1(); //S1 按键处理函数void judge_s2(); //S2 按键处理函数 void judge_s3(); //S3 按键处理函数void dis(uchar s6,uchar s5,uchar s4,uchar s3,uchar s2,uchar s1); 示子程序 void dis_sa n( uchar s6,uchar s5,uchar s4,uchar s3,uchar s1,uchar san); 〃闪烁显示子程序 void judge_dis(); //显示处理函数 void judge_clock(); // 显示处理函数 void set_ds1302(); // 设置时间void get_ds1302();// 读取当前时间void w_1byte_ds1302(uchar t); // 向 DS130写一个字节的数据 uchar r_1byte_ds1302(); // 从DS130读一个字节的数据//DS18B20测温函数定义延时50*T 微妙函数的声明//数码管1显示子程序 //数码管2显示子程序 //数码管3显示子程序 //数码管4显示子程序 //数码管5显示子程序 //数码管6显示子程序//显 s2,ucharvoid w_1byte_ds18b20(uchar value); // 向DS18B2写一个字节ucharr_1byte_ds18b20( void ); // 从DS18B2读取一个字节的数据voidrest_ds18b20( void ); //DS18B20复位程序void readtemp_ds18b20( void ); // 读取温度void dis_temp(); //温度显示函数//共阳数码管断码表const uchar tabl1[16] ={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,// 0 1 2 3 4 50x82,0xf8,0x80,0x90,0x86,0x87,0xFF,//6 7 8 9 E T B0xc6,0xbf,0xff };// C -const uchar tabl3[] ={ 0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09 };uchar t0_crycle;uchar hour_co un t, minu te_c oun t,sec on d_co un t,msec ond_count;uchar clock_hour,clock_m inu te;uchar coun tdow n_sec ond;uchar coun tdow n_hour,co un tdow n_min ute;uchar clock_en; //闹钟关闭和开启的标志,1开启,0关闭uchar flag1,sec on d_flag,za ncun 1,za ncun 2,za ncun3;uchar zancun4 ,za ncun 5,za ncun 6,za ncun7;uchar clock_flag,co un tdow n_flag;uchar msec on d_mi nute,msec on d_sec on d,mseco nd_mseco nd,mseco nd_flag; // 秒表相关参数uint speak_c ount;uchar templ,temph,temp_flag;uchar t_b,t_s,t_g,t_x,temp_flag2; //从左到右分别存储温度百位,十位,个位,小数位uchar tab23[3]; 〃二{0x40,0x59,0x23,0x28,0x11,0x06,0x09};// 上电时默认的时间//主程序void main(){P3 =0x00;flag1 =0;zancun3 =0;msecond_minute =0; //置秒表相关参数为0msecond_second =0;msec on d_msec ond =0;speak =1;//关闭蜂鸣器speak_co unt =0;clock_hour =0;clock_m inute =0;clock_flag =0;countdown_flag =0; //倒计时标志位为0clock_en =0;//开机时默认关闭闹钟ini t_t0();TRO =1;//// set_ds1302();〃设置DS1302勺初始时间//接下来开始编写让数码管显示的程序while (1){get_ds1302();judge_dis(); // 显示处理judge_s1();judge_s2();judge_s3();judge_clock(); //闹钟处理程序} _}void timerO() interrupt 1{TH0=(65536-50000)/256;TL0=(65536 - 50000)%256; t0_crycle ++;if (t0_crycle ==2) // 0.1 秒{t0_crycle =0;msec on d_flag =1;msec ond_count ++;if (msecond_count==10)//1 秒{ _msec on d_co unt =0;sec on d_flag =1;}}}//**************************************************//显示处理函数void judge_dis(){if (flag1 ==0){if (second_flag ==1){ _zancun7 ++;sec on d_flag =0;} _if (zancun7 <1){if (temp_flag2 ==1){ 一readtemp_ds18b20(); // 读取温度temp_flag2 =0;厂dis_temp(); //温度显示函数}if (zancun7 >=1){temp_flag2 =1;zancun4 =hour_count &0xf0;zancun4 >>=4;zancun5 =minute_count&0xf0;zancun5 >>=4;zancun6 =sec on d_co unt&0xf0;zancun6 >>=4;dis(za ncun4 ,hour_co unt &0x0f,za ncun5,minu te_co unt &0x0f,za ncun 6,sec ond_ cou nt &0x0f);dis_led();if (zancun7 ==5)zancun7 =0;}}if (flag1 !=0){switch (flag1){case 1:dis(5,10,11,1,12,12); // 显示SET1led1_bit =1;led2_bit =1;break;case 2:dis(5,10,11,2,12,12); // 显示SET2break;case 3:dis(5,10,11,3,12,12); // 显示SET3break;case 4:dis(5,10,11,4,12,12); // 显示SET4break;case 5:dis(5,10,11,5,12,12); // 显示SET5break;case 6:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,1); break;case 7:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,2); break;case 8:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,3); break;case 9: //进入修改时间,时间分位个位闪烁dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,4); break;case 10: //进入修改闹钟,闹钟小时十位闪烁dis_san(zancunl / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,zancun3,1); break;case 11://进入修改闹钟,闹钟小时个位闪烁dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2%0,12,zancun3,2); break;case 12: //进入修改闹钟,闹钟小时十位闪烁dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,3);break;case 13: //进入修改闹钟,闹钟小时个位闪烁dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,4);break;case 14: //进入修改闹钟的开关dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,6);break;case 15:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,1);break;case 16:dis_san(zancun1 / 10,zancunl %10,zancun2/10,zancun2%0,zancun3/ 10,zancun3%10,2);break;case 17:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2%0,zancun3/ 10,zancun 3%10,3);break;case 18:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,4);break;case 19:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,5);break;case 20:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,6);break;case 21:if (second_flag ==1){ _sec on d_flag =0;countdown_second --;if (countdown_second ==255){ _coun tdow n_sec ond =59;countdown_minute --;if (countdown_minute ==255){ _coun tdow n_min ute =59;countdown_hour --;if (countdown_hour ==255){flag1 =22;coun tdow n_min ute =0;coun tdow n_hour =0;coun tdow n_sec ond =0;coun tdow n_flag=1;_ } } } }dis(countdown_hour / 10,countdown_hour %10,countdown_minute / 10,countdown _minute%10,countdown_second/ 10,countdown_second%10); //break; case 22:{ speak =1;}dis(countdown_hour / 10,countdown_hour %10,countdown_minute / 10,countdown _minute%10,countdown_second/ 10,countdown_second%10); //break; case 23: dis(msecond_minute / 10,msecond_minute%10,msecond_second/ 10,msecond_sec on d%10,mseco nd_msec on d%0,12);break; case 24:if (msecond_flag ==1) { _msec on d_flag =0; msec on d_msec ond ++;if (msecond_msecon (==10){msec on d_msec ond =0; msec on d_sec ond ++;if (msecond_second==60) { _msecond_second =0; msec ond_minute ++;if (countdown_flag { _speak=0;if (second_flag { _sec on d_flag coun tdow n_flag} _ } else>0 &&countdown_flag <7)==1) =0; ++;if (msecond_minute==1OO) { _msec ond_minute =99;flagl =23;}}}}dis(msecond_minute / 10,msecond_minute%10,msecond_second/ 10,msecond_sec on d%10,mseco nd_msec on d%0,12);break;case 25:dis(zancun3 / 10,zancun3 %0,zancun2 / 10,zancun2 %10,zancun1 /10,zancun1 %0 );break;default :break;}}}//**************************************************〃S1按键处理函数void judge_s1(){ _s1_bit =1;//置IO为1,准备读入收据if (s1_bit ==0)//判断是否有按键按下{delay_50us(1); //延时,去除机械抖动if (s1_bit ==0){switch (flag1){case 0:case 1:case 2:case 3:case 4:case 6:case 7:case 8:case 10:case 11:case 12:case 13:case 15:case 16:case 17:case 18:case 19: flag1++;break;case 9: flag1=6;break;case 14: flag1=10;break;case 20: flag1=15;break;case 5:case 21:case 22:case 23: //系统从秒表状态复位case 24: //系统从秒表状态复位case 25: //系统从计数器复位flag1 =0;break;default :break;}while (s1_bit ==0){ _judge_dis();}〃等待按键释放}}}〃************************************************** 〃S2按键处理函数void judge_s2(){ _s2_bit =1; //置IO为1,准备读入收据if (s2_bit ==0)//判断是否有按键按下=0;{delay_50us(1); //延时,去除机械抖动 if (s2_bit ==0) { switch (flagl) { flag1 =6; zancun4 =hour_count &0xf0;zancun4 >>=4; zancun6 =hour_count &0x0f;zancun1=zancun4*10+zancun6; //zancun 1=hour_co unt; zancun5 =minute_count &0xf0; zancun5 >>=4; zancun6 =minute_count &0x0f; zancun2 =za ncun5* 10+za ncun6; case 1: //在显示SET 状态下按S2牛,进入修改时间 // zancun2=minu te_co unt; break; case 2: //在显示SET2犬态下按S2,进入设置闹钟 zancunl =clock_hour; zancun2 =clock_m inu te; flagl =10; break; case 6: //修改时钟小时十位状态下按 case 7: //修改时钟小时个位状态下按 case 8: //修改时钟分钟十位状态下按 case 9: //修改时钟分钟个位状态下按 〃zancun4=za ncun 1/10; 测S:SM tab23[2] =zancun1/10* 16+za ncu n1%10; tab23[1] hour_c ount minu te_c ount sec ond_co unt tab23[0]set_ds1302(); flag1//zancun 5=za ncun2&0 xf0; //zancun 5>>=4; =zancun2/10* 16+za ncu n2%10; =tab23[2]; =tab23[1]; =0; //设置DS130的初始时间 =0;break; case 10: //修改闹钟小时十位状态下按S2case 11: //修改闹钟小时个位状态下按S2case 12: //修改闹钟分钟十位状态下按S2 case 13: //修改闹钟分钟个位状态下按S2 case 14: //修改闹钟使能状态下按S2clock_hour clock_m inute clock_e n flag1=zancun1; =zancun2; =zancun3;=0;break;case 3:flagl =15;zancunl =co un tdow n_hour;zancun2 =co un tdow n_minu te;zancun3 =co un tdow n_sec ond;break;case 15:case 16:case 17:case 18:case 19:case 20:coun tdow n_hour =zancun1;coun tdow n_minute =za ncun2;coun tdow n_sec ond =za ncun3;flag1 =21;coun tdow n_flag =0;break;case 22:flag1 =21;break;case 21:flag1 =22;break;case 4:flag1 =23; //秒表暂停msec ond_minute =0;msecond_second =0;msec on d_msec ond =0;break;case 23:flag1 =24;break;case 24:flag1 =23;break;case 5:flagl =25;//进入计数器模式zancunl =0;zancun2 =0;zancun3 =0;break; default :break;}while (s2_bit ==0){ _judge_dis();}//等待按键释放}}}//**************************************************//S3按键处理函数void judge_s3(){ _s3_bit =1;//置IO为1,准备读入收据if (s3_bit ==0)//判断是否有按键按下{delay_50us(1); //延时,去除机械抖动if (s3_bit ==0){ _switch (flag1){case 6: //修改时间小时的十位数zancun1 +=10;if (zancun1 >=24)zancun1 =zancun 1%10;break;case 7: //修改时间小时的个位数za ncun1 =za ncu n1/10* 10+(za ncun1 %10+1) %10;if (zancun1 >=24)zancun1 =20;break;case 8: //修改时间分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60;break;case 9: //修改时间分钟的个位数za ncun2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 10: //修改闹钟小时的十位数zancunl +=10;if (zancunl >=24)zancunl =zancun 1%10; break;case 11: //修改闹钟小时的个位数zancunl =za ncu n1/10* 10+(za ncun1 %10+1) %10;if (zancun1 >=24)zancun1 =20;break;case 12: //修改闹钟分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60; break;case 13: //修改闹钟分钟的个位数zan cu n2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 14:zancun3 A=1;break;case 15: //修改倒计时小时的十位数zancun1 +=10;if (zancun1 >=100)zancun 1 -=100; break;case 16: //修改倒计时小时的个位数zancun1 =za ncu n1/10* 10+(za ncun1 %10+1) %10;break;case 17: //修改倒计时分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60; break;case 18: //修改倒计时分钟的个位数zan cu n2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 19: //修改倒计时秒的十位数zancun3 +=10;if (zancun3 >=60)zancun3-=60; break;case 20: //修改倒计时秒的个位数zan cu n3 =za ncun3/10* 10+(za ncun3 %10+1) %10;break;case 21:case 22: //coun tdow n_hour =zancun1;coun tdow n_minute =za ncun2;coun tdow n_sec ond =za ncun3;flagl =21;break;case 23:case 24: //秒表复位flag1 =24;msec ond_minute =0;msecond_second =0;msec on d_msec ond =0;break;case 25:zancun1 ++;if (zancun1 ==100){zancun1 =0;zancun2 ++;if (zancun2 ==100){zancun2 =0;zancun3 ++;}}break;default : break;}while (s3_bit ==0){ _judge_dis();}〃等待按键释放}}} //显示处理函数void judge_clock() {zancun4 =hour_count &0xf0;zancun4 >>=4;zancun6 =hour_count &0x0f;zancun4 *=10;zancun4 +=za ncun6;zancun5=minute_count &0xf0;if (san ==1){zancun5 >>=4;zancun6 =minute_count &0x0f;zancun5 *=10;zancun5 +=za ncun6;if (msecond_count<=5) {speak =0; speak_co unt ++;}else{speak =1;}}else{speak =1;}}〃****************************************////闪烁显示子程序void dis_sa n( uchar s6,uchar s5,uchar s4,uchar s3,uchars1,uchar san){if (clock_hour ==zancun4 &&clock_minute ==zancun5){ 一 一if (clock_en { _ speak_co unt clock_flag speak_co unt} _ } else{clock_flag =0;} _if{ (clock_flag ==1 ==1&&clock_flag ==0)=0; //开启蜂鸣器=1;=0;&&speak_count <400)s2,ucharif (msecond_count<5) { _ display1(s6);}}else{display1(s6);}if (san ==2){if (msecond_count<5) { _ display2(s5);}}else{display2(s5);}if (san ==3){if (msecond_count<5) { _ display3(s4);}}else{display3(s4);}if (san ==4){if (msecond_count<5) { _ display4(s3);}}else{display4(s3);}if (san ==5){if (msecond_count<5){ _ display5(s2);}}else{display5(s2);}if (san ==6){if (msecond_count<5){ _ display6(s1);}}else{ display6(s1);}}〃****************************************//时钟显示程序void dis(uchar s6,uchar s5,uchar s4,uchar s3,uchar s2,uchar s1) { display1(s6);display2(s5);display3(s4);display4(s3);display5(s2);display6(s1);}〃********************************************************************************************void init_tO(){ _TMOD0x01;〃设定定时器工作方式1,定时器定时50毫秒TH0=(65536-50000)/256;TL0=(65536- 50000)%256;EA=1; //开总中断ET0=1; //允许定时器0中断t0_crycle =0; //定时器中断次数计数单元}//LED处理函数void dis_led(){if (msecond_count<5){ _Ied1_bit =1;Ied2_bit =1;}else{led1_bit =0;led2_bit =0;}}〃***************************************************************//功能:把数据1显示在数码管1上void display6(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit6 =0; // 锁存数据delay_50us(40); dis_bit6 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display5(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit5 =0; // 锁存数据delay_50us(40);dis_bit5 =1;} _〃***************************************************************//功能:把数据1显示在数码管1上void display4(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit4 =0; // 锁存数据delay_50us(40);dis_bit4 =1;} 〃***************************************************************//功能:把数据1显示在数码管1上void display3(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit3 =0; // 锁存数据delay_50us(40);dis_bit3 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display1(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit1 =0; // 锁存数据delay_50us(40);dis_bit1 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display2(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit2 =0; // 锁存数据delay_50us(40);dis_bit2 =1;}〃******************************************************************* *******************************// 函数名称:void delay_50US(unsigned int t)//功能:延时50*t(us)void delay_50us(uint t){ _unsigned char j;for (;t >0;t --){for (j =19;j >0;j --);}}〃******************************************************************* ************〃8微秒延时基准程序void delay_8us(uint t){while (-- t);}************〃3微秒延时程序void delay_3us() {}〃******************************************************************* ************//子程序功能:向DS18B2写一字节的数据void w_1byte_ds18b20(uchar value){uchar i =0;for (i =0;i <8;i ++){dq_ds18b20 =1;delay_3us();dq_ds18b20 =0; delay_8us(2);if ( value & 0x01) dq_ds18b20 =1; 〃DQ = 1 delay_50us(1); // 延时50us 以上delay_8us(2);value >>=1;}dq_ds18b20 =1; //DQ = 1}//读一个字节uchar r_1byte_ds18b20( void){ 一一uchar i =0;uchar value = 0;for (i =0;i <8;i ++){value >>=1;dq_ds18b20 =0;// DQ_L;delay_3us();dq_ds18b20 =1; 〃DQ_H;delay_8us(2);if (dq_ds18b20==1) value |= 0x80;delay_8us(6); // 延时40us}dq_ds18b20 =1;return value ;}11 ・**************************************************〃ds18b20复位子程序void rest_ds18b20( void){rest:delay_3us(); // 稍做延时delay_3us();dq_ds18b20 =1;delay_3us();dq_ds18b20 =0;// DQ_L; delay_50us(11); 〃480us<T<960usdq_ds18b20 =1; // 拉高总线delay_8us(5);if (dq_ds18b20==1){return ;}delay_50us(2); // 延时90usif (dq_ds18b20==1){return ;}else{goto rest;}}〃****************************************************//读取温度void readtemp_ds18b20( void){ _uchar temp32;rest_ds18b20();w_1byte_ds18b20(0xcc); //跳过读序列号的操作w_1byte_ds18b20(0x44); // 启动温度转换delay_8us(2);rest_ds18b20();w_1byte_ds18b20(0xcc); //跳过读序列号的操作w_1byte_ds18b20(0xbe); //读取温度寄存器等(共可读9个寄存器)前两个就是温度templ =r_1byte_ds18b20();temph =r_1byte_ds18b20();if ((temph &0xf0)) //判断温度的正负性{temp_flag =0; //温度为负数标志temph =-temph;tempi =-templ;t_x =tabl3[templ & OxOf]; // 计算温度的小数temp32 =temph & OxOf;temp32 <<=4;tempi >>=4;temp32 =temp32 | tempi;t_b =temp32/100%10; //计算温度的百位数据t_s =temp32/10%0;〃计算温度的十位数据t_g =temp32%0;〃计算温度的个位数据5else //为正数{t_x =tabl3[templ & 0x0f]; // 计算温度的小数temp32 =temph & 0x0f;temp32 <<=4;templ >>=4;temp32 =temp32 | templ;t_b =temp32/100%10; //计算温度的百位数据t_s =temp32/10%0;〃计算温度的十位数据t_g =temp32%0;〃计算温度的个位数据temp_flag =1;} _}void dis_temp() //温度显示函数{ _if (temp_flag =1){ _if (t_b ==0){dis(12,12,t_s,t_g,13,12);}else{dis(12,t_b,t_s,t_g,13,12);}}else{dis(14,t_b,t_s,t_g,13,12);}}/ / """""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" / / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ############ //;子程序名:w_1byte_ds1302//;功能:向DS130写一个字节的数据void w_1byte_ds1302(uchar t){uchar i;for (i =0;i <8;i ++){if (t & 0x01){io_ds1302=1;}else{io_ds1302 =0;}clk_ds1302 =1;delay_3us();delay_3us();clk_ds1302 =0;delay_3us();delay_3us();t >>=1;}}/ / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ######//;子程序名:r_1byte_ds1302()//;功能:从DS130读一个字节的数据uchar r_1byte_ds1302(){ 一一uchar i,temp11 =0;io_ds1302 =1;//置10为1,准备读入数据for (i =0;i <8;i ++){temp11 >>=1;if (io_ds1302) temp11 |= 0x80;clk_ds1302 =1;delay_3us();delay_3us();clk_ds1302 =0;delay_3us();}return (temp11);}/ / """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""/ / , JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ """""""""""""""ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff//;子程序名:setbds1302//;功能:设置DS130初始时间,并启动计时void set_ds1302(){uchar i,j;rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(0x8e); // 写控制命令字delay_3us();w_1byte_ds1302(0x00); // 写保护关闭clk_ds1302 =1;delay_3us();for (i =0,j =0x80;i <7;i ++,j +=2){rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(j);delay_3us();w_1byte_ds1302(tab23[i]);delay_3us();delay_3us();clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();delay_3us();} _rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(0x8e); delay_3us();w_1byte_ds1302(0x80); clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();}/ / """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" / / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff //;子程序名:get1302void get_ds1302(){ _uchar temp11[7],i,j;for (i =0;i <7;i ++){temp11[i] =0;}for (i =0,j =0x81;i <7;i ++,j +=2){rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();delay_3us();w_1byte_ds1302(j);temp11[i] =r_1byte_ds1302();delay_3us();clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();} _if (temp11[0] != 0xff){second_count =temp11[0]; }if (temp11[1] != 0xff) // 数据验证{minute_count =temp11[1]; }if (temp11[2] != 0xff) // 数据验证{hour_count =temp11[2]; }// date=temp[3];//mon th=temp[4];// week=temp[5];//year=temp[6];}/*===================================================================调试要求:1. MCU:AT89S52 芯片或AT89C522. 晶振:12MHz功能:多功能时钟+温度计/#inelude <reg52. h>#inelude vintrins . h>sbit dis_bit1 =P2A 7; //定义数码管控制口sbit dis_bit2 =卩2八6;//定义数码管控制口sbit dis_bit3 =卩2八4;//定义数码管控制口sbit dis_bit4 =卩2八3;//定义数码管控制口sbit dis_bit5 =卩2八1; //定义数码管控制口sbit dis_bit6 =P2A0; //定义数码管控制口sbit led1_bit =卩2八2; // 定时 LED 勺控制口sbit led2_bit =卩2八5; // 定时 LED 勺控制口sbit s1_bit =P1A0; // 定义S1 控制口sbit s2_bit =P01; // 定义 S2空制口sbit s3_bit =P02; // 定义 S3控制口sbit dq_ds18b20 =P3A3;// 定义控制 DS18B20 sbit speak =P3A7; //定义蜂鸣器控制口sbit clk_ds1302 =P3A6; // 定义控制 DS1302勺时钟线 sbit io_ds1302 =P3A5;//定义控制DS1302勺串行数据sbit rest_ds1302 =P3A4;#define smg_data P0 //定义数码管数据口 void delay_3us(); //3US 的延时程序 void delay_8us(ui nt t); //8US 延时基准程序void delay_50us(ui nt t); // void display1(uehardis_data); voiddisplay2(uehar dis_data); void display3(uehar dis_data); void display4(uehar dis_data); void display5(uehar dis_data); void display6(uehar dis_data);void init_t0(); //定时器0初始化函数void dis_led(); //LED 处理函数void judge_s1();//S1 按键处理函数 void judge_s2(); //S2 按键处理函数void judge_s3(); //S3 按键处理函数 void dis(uehar s6,uehar s5,uehar s4,uehar s3,uehar s2,uehar s1); 示子程序 void dis_sa n( uchar s6,uehar s5,uehar s4,uehar s3,uehars1,uchar san); 〃闪烁显示子程序void judge_dis(); //显示处理函数void judge_clock(); // 显示处理函数void set_ds1302(); // 设置时间void get_ds1302(); // 读取当前时间#define uehar#define uintunsigned char unsigned int延时50*T 微妙函数的声明//数码管1显示子程序 //数码管2显示子程序 //数码管3显示子程序//数码管4显示子程序//数码管5显示子程序//数码管6显示子程序 //显s2,ueharvoid w_1byte_ds1302(uchar t); // 向DS130写一个字节的数据uchar r_1byte_ds1302(); // 从DS130读一个字节的数据〃*******************************************************************//DS18B20测温函数定义void w_1byte_ds18b20(uchar value); // 向DS18B2写一个字节ucharr_1byte_ds18b20( void ); // 从DS18B2读取一个字节的数据voidrest_ds18b20( void ); //DS18B20复位程序void readtemp_ds18b20( void ); // 读取温度void dis_temp(); //温度显示函数//共阳数码管断码表const uchar tabl1[16] ={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,// 0 1 2 3 4 50x82,0xf8,0x80,0x90,0x86,0x87,0xFF,//6 7 8 9 E T B0xc6,0xbf,0xff };// C -const uchar tabl3[] ={ 0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09 };uchar t0_crycle;uchar hour_co un t, minu te_c oun t,sec on d_co un t,msec ond_count;uchar clock_hour,clock_m inu te;uchar coun tdow n_sec ond;uchar coun tdow n_hour,co un tdow n_min ute;uchar clock_en; //闹钟关闭和开启的标志,1开启,0关闭uchar flag1,sec on d_flag,za ncun 1,za ncun 2,za ncun3;uchar zancun4 ,za ncun 5,za ncun 6,za ncun7;uchar clock_flag,co un tdow n_flag;uchar msec on d_mi nute,msec on d_sec on d,mseco nd_mseco nd,mseco nd_flag; // 秒表相关参数uint speak_c ount;uchar templ,temph,temp_flag;uchar t_b,t_s,t_g,t_x,temp_flag2; //从左到右分别存储温度百位,十位,个位,小数位上电时默认的uchar tab23[3]; 〃二{0x40,0x59,0x23,0x28,0x11,0x06,0x09};//时间//主程序void main(){P3 =0x00;flag1 =0;zancun3 =0;msecond_minute =0; //置秒表相关参数为0msecond_second =0;msec on d_msec ond =0;speak =1;//关闭蜂鸣器speak_co unt =0;clock_hour =0;clock_m inute =0;clock_flag =0;countdown_flag =0; //倒计时标志位为0clock_en =0;//开机时默认关闭闹钟ini t_t0();TR0 =1;//// set_ds1302();〃设置DS130的初始时间//接下来开始编写让数码管显示的程序while (1){get_ds1302();judge_dis(); // 显示处理judge_s1();judge_s2();judge_s3();judge_clock(); //闹钟处理程序} _}void timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536- 50000)%256;t0_crycle ++;if (t0_crycle ==2) // 0.1 秒{t0_crycle =0;msec on d_flag =1;msec ond_count ++;if (msecond_count==10)//1 秒。
单片机恒温箱温度控制系统的设计说明
课程设计课题:单片机培养箱温控系统设计本课程设计要求:温度控制系统基于单片机,实现对温度的实时监控,实现控制的智能化。
设计了培养箱温度控制系统,配备温度传感器,采用DS18B20数字温度传感器,无需数模/数转换,可直接与单片机进行数字传输,采用PID控制技术,可保持温度在要求的恒定范围内,配备键盘输入设定温度;配备数码管L ED显示温度。
技术参数及设计任务:1、使用单片机AT89C2051控制温度,使培养箱保持最高温度110 ℃ 。
2、培养箱温度可预设,干燥过程恒温控制,控温误差小于± 2℃.3、预设时显示设定温度,恒温时显示实时温度。
采用PID控制算法,显示精确到0.1℃ 。
4、当温度超过预设温度±5℃时,会发出声音报警。
和冷却过程没有线性要求。
6、温度检测部分采用DS18B20数字温度传感器,无需数模/数转换,可直接与单片机进行数传7 、人机对话部分由键盘、显示器、报警三部分组成,实现温度显示和报警。
本课程设计系统概述一、系统原理选用AT89C2051单片机作为中央处理器,通过温度传感器DS18B20采集培养箱的温度,并将采集的信号传送给单片机。
驱动培养箱的加热或冷却。
2、系统整体结构总体设计应综合考虑系统的总体目标,进行初步的硬件选型,然后确定系统的草案,同时考虑软硬件实现的可行性。
经过反复推敲,总体方案确定以爱特梅尔公司推出的51系列单片机为温度智能控制系统核心,选用低功耗、低成本的存储器、数显等元器件。
总体规划如下:图1 系统总体框图2、硬件单元设计一、单片机最小系统电路Atmel公司的AT2051作为89C单片机,完全可以满足本系统所需的采集、控制和数据处理的需要。
单片机的选择在整个系统设计中非常重要。
该单片机具有与MCS-51系列单片机兼容性高、功耗低、可在接近零频率下工作等诸多优点。
广泛应用于各种计算机系统、工业控制、消费类产品中。
AT 89C2051 是 AT89 系列微控制器中的精简产品。
基于单片机的温室大棚温度控制系统设计_毕业论文剖析

ORG 00H
JMP START
ORG 0BH
JMP TIM0
START: MOV TMOD,#01H
MOV TH0,#60
MOV TL0,#76
SETB TR0
MOV IE,#82H
MOV R4,#09H
MOV R0,#30H
CLEAR: MOV @R0,#00H
DJNZ R4,CLEAR
JMP WAIT
ADC: MOVX A,@R0
MOV 37H,A
CLR C
SUBB A,36H
JC TDOWN
TUP: MOV A,37H
CLR C
SUBB A,34H
JNC POFF
JMP LOOP
PON: CLR P2.1
JMP START0
POFF: SETB P2.1
JMP LOOP
TDOWN: MOV A,37H
图4 ADC0804
如图4,A/D转换器就是模拟/数字转换器,是将输入的模拟信号转换成数字信号。信号输入端的信号可以是传感器或是转换器的输出,而ADC输出的数字信号可以提供给微处理器,以便更广泛地应用。
ADC0804电压输入与数字输出关系如下表2所示:
十六进制
二进制码二
与满刻度的比率
相对电压值VREF=2.56伏
A
1010
10/16
10/256
3.200
0.200
9
1001
9/16
9/256
2.880
0.180
8
1000
8/16
8/256
2.560
0.160
7
0111
7/16
基于STC89C52单片机的温度控制电路设计

2.7系统整体硬件电路系统整体硬件电路包括,传感器数据采集电路,温度显示电路,单片机主控电路等,通过Protel99se 可画出如图2-9所示的电路图[9][10][11]图2-9 温度控制电路原理三系统软件设计3.1 温度控制系统原理框图主控制程序的主要是用来实时控制当前所要测控的环境温度,并读出由DS18B20测量的经过处理的当前环境的温度值,同时检查温度是否在限度之内,否则报警,同时调整温度值。
其主控制程序流程图如3-1所示。
图3-1 主程序流程图图3-2读温度流程图温度控制系统C语言程序#include <reg51.h>#define uint unsigned int#define uchar unsigned charsbit p34=P2^4;sbit p35=P2^5;sbit p36=P2^6;sbit dp=P0^7;sbit p37=P2^7;sbit DQ=P2^2; //定义DS18B20总线I/Osbit SET=P3^1; //定义选择报调整警温度上限和下限(1为上限,0为下限)sbit LING=P2^0; //定义闪烁signed char m; //温度值全局变量bit sign=0; //外部中断状态标志signed char shangxian=38; //上限报警温度,默认值为38signed char xiaxian=5; //下限报警温度,默认值为5ucharcode LEDData[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xbf}; /*****延时子程序*****/void Delay(uint i){while( i-- );}/*****初始化DS18B20*****/void Init_DS18B20(void){unsigned char x=0;DQ=1;Delay(8); //稍做延时DQ=0; //单片机将DQ拉低Delay(80); //精确延时,大于480usDQ=1; //拉高总线Delay(14);x=DQ; //稍做延时后,如果x=0则初始化成功,x=1则初始化失败Delay(20);}/*****读一个字节*****/unsigned char ReadOneChar(void){unsigned char i=0;unsigned char dat=0;for (i=8;i>0;i--){DQ=0; // 给脉冲信号dat>>=1;DQ=1; // 给脉冲信号if(DQ)dat|=0x80;Delay(4);}return(dat);}/*****写一个字节*****/void WriteOneChar(unsigned char dat){unsigned char i=0;for (i=8; i>0; i--){DQ=0;DQ=dat&0x01;Delay(5);DQ=1;dat>>=1;}}void Tmpchange(void) //发送温度转换命令{Init_DS18B20();WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0x44); //启动温度转换}/*****读取温度*****/unsigned int ReadTemperature(void){unsigned char a=0;unsigned char b=0;unsigned int t=0;float tt=0;Tmpchange();Init_DS18B20();WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器a=ReadOneChar(); //读低8位b=ReadOneChar(); //读高8位t=b;t<<=8;t=t|a;tt=t*0.0625;t= tt*100+0.5; //放大100倍输出并四舍五入return(t);}/*****显示开机初始化等待画面*****/Disp_init(){P0 = 0x80; //显示-p34=1;p35=0;p36=0;p37=0;Delay(200);P0 = 0x80;p34=0;p35=1;p36=0;p37=0;Delay(200);P0 = 0x80;p34=0;p35=0;p36=1;p37=0;Delay(200);P0 = 0x80;p34=0;p35=0;p36=0;p37=1;Delay(200);P0 = 0x80;}/*****显示温度子程序*****/Disp_Temperature() //显示温度{uint a,b,c,d,e;e=ReadTemperature(); //获取温度值a=e/1000; //计算得到十位数字b=e/100-a*10; //计算得到个位数字d=e%10; //计算得到小数点后两位c=(e%100)/10; //计算得到小数点后一位m=e/100;if(m>shangxian || m<xiaxian) LING=1; //温度不在范围内报警else LING=0;p34=0;p35=0;p36=0;p37=0;P0 =LEDData[d]; //显示小数点后两位p34=1;p35=0;p36=0;p37=0;Delay(300);p34=0;p35=0;p36=0;p37=0;P0 =LEDData[c]; //显示小数点后一位p34=0;p35=1;p36=0;p37=0;Delay(300);p34=0;p35=0;p36=0;p37=0;P0 =LEDData[b]; //显示个位dp=0;p34=0;p35=0;p36=1;p37=0;Delay(300);p34=0;p35=0;p36=0;p37=0;P0 =LEDData[a]; //显示十位p34=0;p35=0;p36=0;p37=1;Delay(300);p34=0;p35=0;p36=0;p37=0; //关闭显示}disptiaozheng(){uchar f,g,j,k;f=shangxian/10;g=shangxian%10;j=xiaxian/10;k=xiaxian%10;p34=0;p35=0;p36=0;p37=0;P0 =0xc0; //显示0p34=1;p35=0;p36=0;p37=0;Delay(200);p34=0;p35=0;p36=0;p37=0;P0 =0xc0; //显示0p34=0;p35=1;p36=0;p37=0;Delay(200);p34=0;p35=0;p36=0;p37=0;if(SET==1){P0 =LEDData[g];dp=0; //显示上限温度个位}else{P0 =LEDData[k];dp=0;}p34=0;p35=0;p36=1;p37=0;Delay(200);p34=0;p35=0;p36=0;p37=0;if(SET==1) P0 =LEDData[f]; //显示上限温度十位else{if(f==0) P0=0x00; //不显示下限温度十位else P0 =LEDData[j]; //显示下限温度十位}p34=0;p35=0;p36=0;p37=1;Delay(200);p34=0;p35=0;p36=0;p37=0; //关闭显示Delay(20);}/*****外部中断0服务程序*****/void int0(void) interrupt 0{EX0=0; //关外部中断0 sign=1;if(SET==1) shangxian++;else xiaxian++;Delay(500);EX0=1;}/*****外部中断1服务程序*****/void int1(void) interrupt 2{EX1=0; //关外部中断0 sign=1;if(SET==1) shangxian--;else xiaxian--;Delay(500);EX1=1;}/*****主函数*****/void main(void){uint z;IT0=1;IT1=1;EX0=1;EX1=1;EA=1;ReadTemperature();LING=0;for(z=0;z<100;z++){Disp_init();}while(1){Disp_Temperature();if(sign==1){for(z=0;z<300;z++)disptiaozheng();sign=0;}}}。
基于单片机的水温控制系统课程设计
基于单片机的水温控制系统第1节引言水温控制在工业及日常生活中应用广泛,分类较多,不同水温控制系统的控制方法也不尽相同,其中以PID控制法最为常见。
单片机控制部分采用AT89C51单片机为核心,采用软件编程,实现用PID算法来控制PWM波的产生,进而控制电炉的加热来实现温度控制。
然而,单纯的PID算法无法适应不同的温度环境,在某个特定场合运行性能非常良好的温度控制器,到了新环境往往无法很好胜任,甚至使系统变得不稳定,需要重新改变 PID 调节参数值以取得佳性能。
本文首先用PID算法来控制PWM波的产生,进而控制电炉的加热来实现温度控制。
然后在模型参考自适应算法 MRAC基础上,用单片机实现了自适应控制,弥补了传统 PID控制结构在特定场合下性能下降的不足,设计了一套实用的温度测控系统,使它在不同时间常数下均可以达到技术指标。
此外还有效减少了输出继电器的开关次数,适用于环境参数经常变化的小型水温控制系统。
1.1水温控制系统概述温度控制是无论是在工业生产过程中,还是在日常生活中都起着非常重要的作用,过低的温度或过高的温度都会使水资源失去应有的作用,从而造成水资源的巨大浪费。
特别是在当前全球水资源极度缺乏的情况下,我们更应该掌握好对水温的控制,把身边的水资源好好地利用起来。
在现代冶金、石油、化工及电力生产过程中,温度是极为重要而又普遍的热工参数之一。
在环境恶劣或温度较高等场合下,为了保证生产过程正常安全地进行,提高产品的质量和数量,以及减轻工人的劳动强度、节约能源,要求对加热炉炉温进行测、显示、控制,使之达到工艺标准,以单片机为核心设计的炉温控制系统,可以同时采集多个数据,并将数据通过通讯口送至上位机进行显示和控制。
那么无论是哪种控制,我们都希望水温控制系统能够有很高的精确度(起码是在满足我们要求的范围内),帮助我们实现我们想要的控制,解决身边的问题。
在计算机没有发明之前,这些控制都是我们难以想象的。
而当今,随着电子行业的迅猛发展,计算机技术和传感器技术的不断改进,而且计算机和传感器的价格也日益降低,可靠性逐步提高,用信息技术来实现水温控制并提高控制的精确度不仅是可以达到的而且是容易实现的。
温度控制系统设计
温度控制系统摘要 : 随着微机测量和控制技术的迅速开展与广泛应用,以单片机为核心的温度采集与控制系统的研发与应用在很大程度上提高了生产生活中对温度的控制水平。
本设计论述了一种以STC89C52单片机为主控制单元,以 DS18B20为温度传感器的温度控制系统。
该控制系统可以实时存储相关的温度数据并记录当前的时间。
系统设计了相关的硬件电路和相关应用程序。
硬件电路主要包括STC89C52单片机最小系统,测温电路、实时时钟电路、 LCD 液晶显示电路以及通讯模块电路等。
系统程序主要包括主程序,读出温度子程序,计算温度子程序、 LCD 显示程序以及数据存储程序等。
关键词:STC89C52, DS18B20,LCDAbstract:Along with the computer measurement and control technology of the rapid development and wide application,based on singlechip temperature gathering and control system development and application greatly improve the production of temperature in life level of control. This design STC89C52 describes a kind ofmainly by MCU control unit, for temperature sensor DS18B20 temperature control system. The control system can real-time storage temperature data and recordrelated to the current time. System design related hardware circuit and related applications. STC89C52 microcontroller hardware circuit include temperaturedetection circuit smallest system, and real-time clock circuit, LCD displaycircuit, communication module circuit, etc. System programming mainly includemain program,read temperature subroutine,the calculation of temperature subroutines, LCD display procedures and data storage procedures, etc.Keywords: STC89C52, DS18B20,LCD目录1前言 (1)2总体方案设计 (2)方案设计 (2)方案论证 (3)方案选择 (3)3单元模块的设计 (4)单片机模块 . (4)18B20 温度模块 (5)显示器模块 . (6)4软件设计 (7)系统总框图 (7)温度采集子程序 (8)5系统功能与调试方法介绍 (9)系统功能 (9)系统指标 (9)系统调试 (9)6参考文献 (10)附录 1:相关设计图 (11)附录 2:元器件清单 (13)附录 3:源程序 (14)1前言工业控制是计算机的一个重要应用领域,计算机控制系统正是为了适应这一领域的需要而开展起来的一门专业技术,它主要研究如何将计算机技术、通过信息技术和自动控制理论应用于工业生产过程,并设计出所需要的计算机控制系统。
基于AT89C51的温度控制系统设计
基于AT89C51的温度控制系统设计冯晓锋西安翻译学院实验中心摘要:本系统是基于AT89C51单片机和DS18B20数字温度传感器的智能温度控制系统,根据要求可进行最高和最低温度的设定,通过RS-485总线标准实现与PC机的远程通信,实现PC机对采集温度的存储、处理、打印等功能。
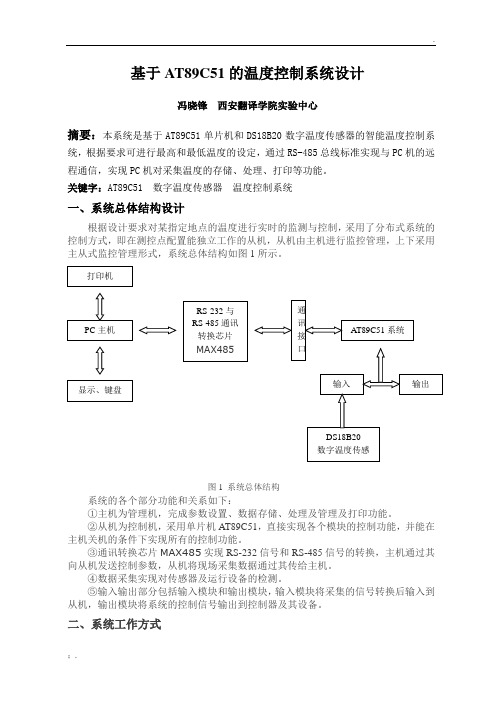
关键字:AT89C51 数字温度传感器温度控制系统一、系统总体结构设计根据设计要求对某指定地点的温度进行实时的监测与控制,采用了分布式系统的控制方式,即在测控点配置能独立工作的从机,从机由主机进行监控管理,上下采用主从式监控管理形式,系统总体结构如图1所示。
图1 系统总体结构系统的各个部分功能和关系如下:①主机为管理机,完成参数设置、数据存储、处理及管理及打印功能。
②从机为控制机,采用单片机AT89C51,直接实现各个模块的控制功能,并能在主机关机的条件下实现所有的控制功能。
③通讯转换芯片MAX485实现RS-232信号和RS-485信号的转换,主机通过其向从机发送控制参数,从机将现场采集数据通过其传给主机。
④数据采集实现对传感器及运行设备的检测。
⑤输入输出部分包括输入模块和输出模块,输入模块将采集的信号转换后输入到从机,输出模块将系统的控制信号输出到控制器及其设备。
二、系统工作方式系统以温度监控为核心,温度参数和设备运行状态由主机根据用户要求定时向从机查询,各控制模块的设置参数修改时,将新的参数发送到从机。
主机可以对从机进行参数设置及控制,从机也可以独立工作。
从机通过温度传感器不间断地采集温度数据,根据控制模块的设置参数做出控制决策,驱动设备运行,并随时准备接受主机的指令,当受到询问时,将各项数据编码通过串行通信方式传输到主机。
主机接收到数据后,进行数据处理,在监控界面上显示当前的状态信息,并将此信息实时地存储到数据库中,为用户维护和管理准备数据。
对数据可以进行查询,也可以将一段时期的数据信息汇集成报表,报表包括各项统计数据,还可以将数据处理绘制成图形曲线,实现对数据的分析与管理。
水温控制原理图

R? P 1.4
1 00
VCC U? B UZZER
Q? P NP
图7 当温度低于或高出给定的温度值后,蜂鸣器报警。
7.键盘与显示器的借口部分
1 2 3 4 5 6 7 8 190 11 12 13 14
D00 D01 D02 D03 D04 D05 D06 D07 CS7
RD WR AP38.2
Y0 Y1 Y2 Y3 Y4 Y5 Y6 Y7
15 14 13 12 11 10 9 7
7 4LS1 38
U?
K11 2 K12 3
4 5 6 7 8 9
A0 A1 A2 A3 A4 A5 A6 A7
B0 B1 B2 B3 B4 B5 B6 B7
18 17 16 15 14 13 12 11
B1 B2 B3 B4 B5 B6 B7 B8
AVcc
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
DVcc P6.3 /A3 P6.4 /A4 P6.5 /A5 P6.6 /A6/DAC0 P6.7 /A7/DAC1 /SVSIN VREF+ XIN XOUT/ TCLK VeR EF + VREF- /Ve REF P1.0 /TACLK P1.1 /TA0 P1.2 /TA1 P1.3 /TA2 P1.4 /SMCLK
1 2K
+12 V
7
U3
3
LM3 105
6
2
VOUT
8
1
4
-1 2V
R w3 +12 V
2 0k
图1
➢ 传感器部分
传感器 LM35 的使用电路非常简单,只需将其电源、地端与供电源相连, 将触点置于被测点处,而将输出端与放大电路的输入端相连就可以了。
基于单片机的温度控制系统设计

基于51单片机的水温自动控制系统沈统摘要:在现代化的工业生产中,温度是常用的测量机被控参数。
本水温控制系统采用AT89C51为核心控制器件,实现对水温在30℃到96℃的自动控制。
由精密摄氏温度传感器LM35D构成前置信号采集和调理电路,过零检测双向可控硅输出光电耦合器MOC3041构成后向控制电路,由74LS164和LED数码管构成两位静态显示用于显示实时温度值。
关键词:89C51单片机;LM35D温度传感器;ADC0809;MOC3041光电藕耦合器;水温自动控制0 引言在现代的各种工业生产中 ,很多地方都需要用到温度控制系统。
而智能化的控制系统成为一种发展的趋势。
本文所阐述的就是一种基于89C51单片机的温度控制系统。
本温控系统可应用于温度范围30℃到96℃。
1 设计任务、要求和技术指标1.1任务设计并制作一水温自动控制系统,可以在一定范围(30℃到96℃)内自动调节温度,使水温保持在一定的范围(30℃到96℃)内。
1.2要求(1)利用模拟温度传感器检测温度,要求检测电路尽可能简单。
(2)当液位低于某一值时,停止加热。
(3)用AD转换器把采集到的模拟温度值送入单片机。
(4)无竞争-冒险,无抖动。
1.3技术指标(1)温度显示误差不超过1℃。
(2)温度显示范围为0℃—99℃。
(3)程序部分用PID算法实现温度自动控制。
(4)检测信号为电压信号。
2 方案分析与论证2.1主控系统分析与论证根据设计要求和所学的专业知识,采用AT89C51为本系统的核心控制器件。
AT89C51是一种带4K字节闪存可编程可擦除只读存储器的低电压,高性能CMOS 8位微处理器。
其引脚图如图1所示。
2.2显示系统分析与论证显示模块主要用于显示时间,由于显示范围为0~99℃,因此可采用两个共阴的数码管作为显示元件。
在显示驱动电路中拟订了两种设计方案:方案一:采用静态显示的方案采用三片移位寄存器74LS164作为显示电路,其优点在于占用主控系统的I/O口少,编程简单且静态显示的内容无闪烁,但电路消耗的电流较大。
基于51单片机温度控制系统设计毕业答辩ppt课件

系统的结构框图:
AD590 温度采集
ADC0809 A/D转换
控制电路
AT89C51
光电耦合 器可控硅SC源自 电热丝显示电路温度控制系统设计
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
系统的硬件设计
系统工作原理:
在温控部分,选用AT89C51单片机为中央处 理器,通过AD590温度传感器进行温度采集, 将采集到的温度信号通过A/D转换再传输给单 片机,再由单片机控制显示器和执行单元。
执行单元是由单片机发出一个触发信号,
通过光电耦合器和双向可控硅来控制电热 丝的加热与停止。
温度控制系统设计
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
A/D转换器 (ADC0809)
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
系统控制方案的选择: 这个方案是采用AT89C51单片机系统来实现的,
单片机软件编程灵活、自由度大,可用软件编程实现 各种控制算法和逻辑控制。单片机系统可以用数码管 来显示水温的实际值,能用键盘输入设定值。本方案 选用的AT89C51芯片,不需要外扩展存储器,使系统 整体结构更为简单
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
DS18B20水温控制系统+电路图程序

水温控制系统摘要:该水温控制系统采用单片机进行温度实时采集与控制。
温度信号由“一线总线”数字化温度传感器DS18B20提供,DS18B20在-10~+85°C范围内, 固有测温分辨率为0.5 ℃。
水温实时控制采用继电器控制电热丝和风扇进行升温、降温控制。
系统具备较高的测量精度和控制精度,能完成升温和降温控制。
关键字: AT89C51 DS18B20 水温控制Abstract: This water temperature control system uses the Single Chip Microcomputer to carry on temperature real-time gathering and controling. DS18B20, digitized temperature sensor, provides the temperature signal by "a main line". In -10~+85℃the scope, DS18B20’s inherent measuring accuracy is 0.5 ℃. The water temperature real-time control system uses the electricity nichrome wire carring on temperature increiseament and operates the electric fan to realize the temperature decrease control. The system has the higher measuring accuracy and the control precision, it also can complete the elevation of temperature and the temperature decrease control.Key Words:AT89C51 DS18B20 Water temperature control目录1. 系统方案选择和论证 (2)1.1 题目要求 (2)1.1.1 基本要求 (2)1.1.2 发挥部分 (2)1.1.3 说明 (2)1.2 系统基本方案 (2)1.2.1 各模块电路的方案选择及论证 (2)1.2.2 系统各模块的最终方案 (5)2. 硬件设计与实现 (6)2.1系统硬件模块关系 (6)2.2 主要单元电路的设计 (6)2.2.1 温度采集部分设计 (6)2.2.2 加热控制部分 (8)2.2.3 键盘、显示、控制器部分 (8)3. 系统软件设计 (10)3.1 读取DS18B20温度模块子程序 (10)3.2 数据处理子程序 (10)3.3 键盘扫描子程序 (12)3.4 主程序流程图 (13)4. 系统测试 (14)4.1 静态温度测试 (14)4.2动态温控测量 (14)4.3结果分析 (14)附录1:产品使用说明 (15)附录2:元件清单 (15)附录3:系统硬件原理图 (16)附录4:软件程序清单 (17)参考文献 (26)1.系统方案选择和论证1.1题目要求设计并制作一个水温自动控制系统,控制对象为1L净水,容器为搪瓷器皿。
单片机的水温控制系统设计
数理与信息工程学院《单片机原理及应用》期末课程设计题目:基于单片机的水温控制系统专业:班级:姓名:学号:指导老师:成绩:目录摘要 (4)第1节课题任务要求 (5)第2节总体方案设计 (5)2.1 总体方案确定 (6)2.1.1 控制方法选择 (6)2.1.2 系统组成 (7)2.1.3 单片机系统选择 (7)2.1.4 温度控制 (7)2.1.5 方案选择 (7)第3节系统硬件设计 (8)3.1 系统框图 (8)3.2 程序流程图 (12)第4节参数计算 (16)4.1 系统模块设计 (16)4.1.1 温度采集及转换 (16)4.1.2 传感器输出信号放大 (17)4.1.3模数转换 (18)4.1.4 外围电路设计 (19)4.1.5 数值处理及显示部分 (19)4.1.6 PID算法介绍 (19)4.1.7 A/D转换模块 (20)4.1.8 控制模块 (21)4.2 系统硬件调试 (21)第5节 CPU软件抗干扰 (24)5.1 看门狗设计 (24)第6节测试方法和测试结果 (27)6.1 系统测试仪器及设备 (27)6.2 测试方法 (27)6.3 测试结果 (27)结束语 (29)参考文献 (30)基于单片机的水温控制系统设计摘要:本系统以AT89C51,AT89C2051单片机为核心,主要包括传感器温度采集,A/D模/数转换,按扭操作,单片机控制,数码管数字显示等部分。
本系统采用PID算法实现温度控制功能,通过串行通信完成两片单片机信息的交互而实现温度设定、控制和显示。
本设计还可以通过串口与上位机(电脑)连接,实现电脑控制。
系统设计有体积小、交互性强等优点。
为了实现高精度的水温控制,本单片机系统采用PID算法控制和PWM脉宽调制相结合的技术,通过控制双向可控硅改变电炉和电源的接通、断开,从而改变水温加热时间的方法来实现对水温的控制。
本系统由键盘显示和温度控制两个模块组成,通过模块间的通信完成温度设定、实温显示、水温升降等功能。
基于单片机的水温水位控制系统设计
本次设计的控制系统是以单片机作为其主控芯片,因此是一种数字化的控制方式,通过传感器配合以模数转换器将水位水温信号转换为数字信号并通过单片机处理从而完成对水位水温的自动控制,利用数字式的温度传感器大幅度的提高了温度测量的精度,并且由于以单片机为控制芯片,可以通过编程方便地扩展其功能,能够满足不同的需求,因而具有巨大的现实意义。
1、单片机的选择
方案一:采用AT89C51单片机,它具4k的Flash闪存,128字节内部RAM,32个I/O口线,两个16位定时/计数器,一个5向量两级中断结构,一个全双工串行通信口,片内振荡器及时钟电路.具有低功耗模式,在空闲模式下CPU停止工作,但允许其他系统的正常工作。
方案二:采用AT89C2051单片机,它具有15个I/O口,2KB可重复编程的Flash并具有128byte的RAM,,两个16位定时器,一个五向量两级中断结构,一个全双工串行口,2.7V—6V的供电范围,全静态工作频率范围为0Hz-24MHz,并配备有2级程序存储器,精度较高的电压比较器。由于其I/O资源较少,不能满足系统的需求。
早期通过模拟电路实现的水位和温度参数控制上存在很多弊端,如电路复杂,成本较高,可靠性低,易受环境影响、扩展功能差等缺点。相比之下,如今数字控制对这一现状有了明显的改善,特别是传感器的发展与应用,使得这一技术的准确度也明显提高。
基于单片机的温度控制报警系统设计
基于单片机的温度控制报警系统设计摘要近年来随着计算机与控制技术的蓬勃发展与广泛应用,人们从中受益良多,生活中也随处可见电子产品,自动化,智能化成为发展趋势,而以单片机为核心的应用正在不断地走向深入,同时带动传统控制检测的日新月益。
本设计论述了一种以STC89C51单片机为控制单元,以DS18B20为温度传感器的温度控制系统。
该控制系统可以实时存储相关的温度数据并可设置温度上下限值,实现对环境温度测量并在超出范围的情况下发出警告。
系统设计了相关的硬件电路和相关应用程序。
硬件电路主要包括STC89C51单片机最小系统,测温电路、LCD液晶显示电路以及报警电路等。
系统程序主要包括主程序,读出温度子程序,计算温度子程序、按键处理程序、LCD显示程序以及数据存储程序等。
关键词:STC89C51单片机;DS18B20;LCD显示电路AbstractIn recent years, along with the computer of technology and control booming development and wide application, people benefit a lot from it, life also can be seen everywhere electronic products, automation, intelligent become development trend, and with the single chip processor as the core application is continuously to the deepening, and push the traditional control examination on the new victims. This design is discussed in STC89C51 micro control is a control unit, with the temperature sensor DS18B20 for the temperature control system. The control system can store related temperature data real-time and set up and down temperature limits, and to realize the environment temperature measurement and beyond the scope of the warning. The system design of the related hardware circuit and related applications. The hardware circuit STC89C51 mainly includes single chip minimize system, temperature measurement circuit, LCD display circuit, alarm circuit, etc. System program mainly includes the main program, read the temperature procedure, the calculation of temperature procedure, key processing program, LCD display procedures and data storage procedures, etc.key words:STC89C51 single-chip microcomputer ; DS18B20 ; LCD displaycircuitII目录摘要 (I)AbstractII (1)绪论 (1)1.1 课题的背景及其意义 (1)1.2 课题研究的内容及要求.................................................................................................... 1.1.3 课题的研究方案.................................................................................................................. 2 .2 电路设计的理论基础 (3)2.1 系统设计的框架..................................................................................................................3.2.2 单片机发展史 (3)2.3 STC89C51系列单片机介绍 (4)2.3.1 STC89C51特性......................................................................................................... 4 .2.3.2 STC89C51系列引脚功能 (5)3 硬件电路设计................................................................................................................................... 8. 3.1 电源电路.. (8)3.2 温度传感器电路.................................................................................................................. 9.3.3 显示电路 (12)3.4 报警电路 (13)3.5 复位电路 (13)4 软件设计 (15).4.1 按键处理子程序................................................................................................................ 15 .5 系统调试及结论分析 (17)5.1 硬件调试 (17)5.1.1 硬件电路故障及解决方法 (17)5.1.2 硬件调试方法 (17)5.2 软件调试 (18)6 总结与展望 (19)6.1 总结 (19)6.2 展望 (19)参考文献 (21)附录 (22)1:系统原理图 (22)2:实物图 (23)3:系统相关程序....................................................................................................................... . 24致谢1 ...........................................................................................................................................................1 绪论1.1 课题的背景及其意义二十一世纪是科技高速发展的信息时代,电子技术、单片机技术更是得到广泛的应用,伴随着科学技术的发展,需要对仪器设备的各种参数进行测量。
51单片机设计数字温度计(流程图+源码+实物图片)
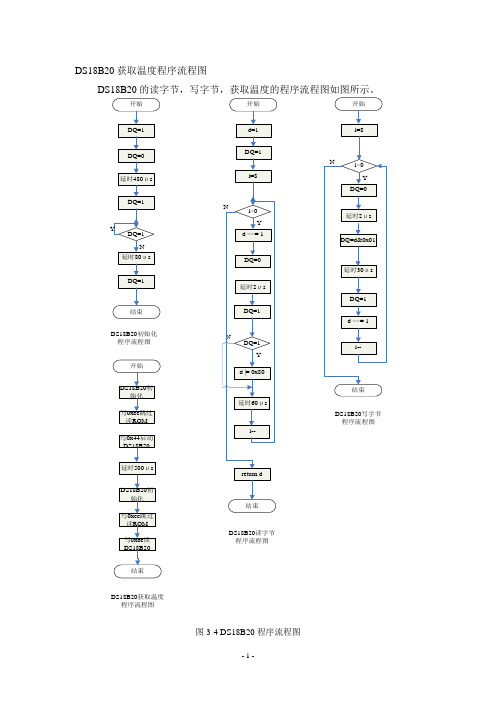
DS18B20获取温度程序流程图DS18B20的读字节,写字节,获取温度的程序流程图如图所示。
DS18B20初始化程序流程图DS18B20读字节程序流程图DS18B20写字节程序流程图DS18B20获取温度程序流程图图3-4 DS18B20程序流程图显示程序设计显示电路是由四位一体的数码管来实现的。
由于单片机的I/O 口有限,所以数码管采用动态扫描的方式来进行显示。
程序流程图如图所示。
图显示程序流程图按键程序设计按键是用来设定上下限报警温度的。
具体的程序流程图如图所示。
N图按键程序流程图附1 源程序代码/********************************************************************* 程序名; 基于DS18B20的测温系统* 功能:实时测量温度,超过上下限报警,报警温度可手动调整。
K1是用来* 进入上下限调节模式的,当按一下K1进入上限调节模式,再按一下进入下限* 调节模式。
在正常模式下,按一下K2进入查看上限温度模式,显示1s左右自动* 退出;按一下K3进入查看下限温度模式,显示1s左右自动退出;按一下K4消除* 按键音,再按一下启动按键音。
在调节上下限温度模式下,K2是实现加1功能,* K1是实现减1功能,K3是用来设定上下限温度正负的。
* 编程者:ZPZ* 编程时间:2009/10/2*********************************************************************/#include<AT89X52.h> //将AT89X52.h头文件包含到主程序#include<intrins.h> //将intrins.h头文件包含到主程序(调用其中的_nop_()空操作函数延时)#define uint unsigned int //变量类型宏定义,用uint表示无符号整形(16位)#define uchar unsigned char //变量类型宏定义,用uchar表示无符号字符型(8位)uchar max=0x00,min=0x00; //max是上限报警温度,min是下限报警温度bit s=0; //s是调整上下限温度时温度闪烁的标志位,s=0不显示200ms,s=1显示1s左右bit s1=0; //s1标志位用于上下限查看时的显示void display1(uint z); //声明display1()函数#include"ds18b20.h" //将ds18b20.h头文件包含到主程序#include"keyscan.h" //将keyscan.h头文件包含到主程序#include"display.h" //将display.h头文件包含到主程序/***********************主函数************************/void main(){beer=1; //关闭蜂鸣器led=1; //关闭LED灯timer1_init(0); //初始化定时器1(未启动定时器1)get_temperature(1); //首次启动DS18B20获取温度(DS18B20上点后自动将EEPROM中的上下限温度复制到TH和TL寄存器)while(1) //主循环{keyscan(); //按键扫描函数get_temperature(0); //获取温度函数keyscan(); //按键扫描函数display(temp,temp_d*0.625);//显示函数alarm(); //报警函数keyscan(); //按键扫描函数}}/********************************************************************* 程序名; __ds18b20_h__* 功能:DS18B20的c51编程头文件* 编程者:ZPZ* 编程时间:2009/10/2* 说明:用到的全局变量是:无符号字符型变量temp(测得的温度整数部分),temp_d* (测得的温度小数部分),标志位f(测量温度的标志位‘0’表示“正温度”‘1’表* 示“负温度”),标志位f_max(上限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位f_min(下限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位w(报警标志位‘1’启动报警‘0’关闭报警)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
引言
在现代化的工业生产中,电流、电压、温度、压力、流量、流速和开关量都是常用的主要被控参数。
例如:在冶金工业、化工生产、电力工程、造纸行业、机械制造和食品加工等诸多领域中,人们都需要对各类加热炉、热处理炉、反应炉和锅炉中的温度进行检测和控制。
采用MCS-51单片机来对温度进行控制,不仅具有控制方便、组态简单和灵活性大等优点,而且可以大幅度提高被控温度的技术指标,从而能够大大提高产品的质量和数量。
因此,单片机对温度的控制问题是一个工业生产中经常会遇到的问题。
本文以它为例进行介绍,希望能收到举一反三和触类旁通的效果。
1硬件电路设计
以热电偶为检测元件的单片机温度控制系统电路原理图如图1所示。
温度检测和变送器
温度检测元件和变送器的类型选择与被控温度的范围和精度等级有关。
镍铬/镍铝热电偶适用于
0℃-1000℃的温度检测范围,相应输出电压为。
变送器由毫伏变送器和电流/电压变送器组成:毫伏变送器用于把热电偶输出的变换成4mA-20mA的电流;电流/电压变送器用于把毫伏变送器输出的4mA-20mA电流变换成0-5V的电压。
为了提高测量精度,变送器可以进行零点迁移。
例如:若温度测量范围为500℃-1000℃,则热电偶输出为,毫伏变送器零点迁移后输出4mA-20mA范围电流。
这样,采用8位A/D转换器就可使量化温度达到℃以内。
接口电路
接口电路采用MCS-51系列单片机8031,外围扩展并行接口8155,程序存储器EPROM2764,模数转换器ADC0809等芯片。
由图1可见,在=0和=0时,8155选中它内部的RAM工作;在=1和=0时,8155选中它内部的三个I/O端口工作。
相应的地址分配为:
0000H - 00FFH 8155内部RAM
0100H 命令/状态口
0101H A 口
0102H B 口
0103H C 口
0104H 定时器低8位口
0105H 定时器高8位口
8155用作键盘/LED显示器接口电路。
图2中键盘有30个按键,分成六行(L0-L5)五列(R0-R4),只要某键被按下,相应的行线和列线才会接通。
图中30个按键分三类:一是数字键0-9,共10个;二是功能键18个;三是剩余两个键,可定义或设置成复位键等。
为了减少硬件开销,提高系统可靠性和降低成本,采用动态扫描显示。
A口和所有LED的八段引线相连,各LED的控制端G和8155C口相连,故A口为字形口,C口为字位口,8031可以通过C口控制LED是否点亮,通过A口显示字符。
图1 单片机温度控制系统电路原理图
图2 8155用作键盘/LED显示器接口电路
2764是8K EPROM型器件。
8031的PSEN和2764的OE相连,和CE相连,所以2764的地址空间为:0000H---1FFFH,ADC0809的0通道(IN0 其他输入端可作备用)和变送器的输出端相连,所以从通道0(IN0)上输入的0V--+5V范围的模拟电压经A/D转换后可由8031通过程序从P0口输入到它的内部RAM单元,在=0和WR=0时,8031可使ALE和START变为高电平而启动ADC0809工作;在=0和RD=0时,8031可以从ADC0809接收A/D转换后的数字量。
也就是说ADC0809可以视为8031的一个外部RAM单元,地址为03F8H (地址重复范围很大),因此,8031执行如下程序可以启动ADC0809工作。
MOVDPTR,#03F8H
MOVX@DPTR,A
若8031执行下列程序:
MOVDPTR,#03F8H
MOVXA,@DPTR
则可以从ADC0809输入A/D转换后的数字量。
温度控制电路
8031对温度的控制是通过双向可控硅实现的。
如图一所示,双向可控硅管和加热丝串接在交流220V、50Hz 市电回路。
在给定周期T内,8031只要改变可控硅管的接通时间即可改变加热丝的功率,以达到调节温度的目的。
可控硅接通时间可以通过可控硅控制极上触发脉冲控制。
该触发脉冲由8031用软件在引脚上产生,在过零同步脉冲同步后经光电耦合管和驱动器输出送到可控硅的控制极上。
3. 温度控制的算法和程序框图
图3 主程序框图
温度控制算法
通常,电阻炉炉温控制都采用偏差控制法。
偏差控制的原理是先求出实测炉温对所需炉温的偏差值,然后对偏差值处理获得控制信号去调节电阻炉的加热功率,以实现对炉温的控制。
在工业上,偏差控制又称PID 控制,这是工业控制过程中应用最广泛的一种控制形式,一般都能收到令人满意的效果。
温度控制程序框图
温度控制程序的设计应考虑如下:1)键盘扫描、键码识别和温度显示;2)炉温采样、数字滤波;3)数据处理;4)越限报警和处理;5)PID计算、温度标度转换
主程序框图
主程序包括8031本身的初始化、并行接口8155初始化等等。
大体说来,本程序包括设置有关标志、暂存单元和显示缓冲区清零、T0初始化、CPU开中断、温度显示和键盘扫描等程序。
中断服务程序框图
T0中断服务程序是温度控制系统的主体程序,用于启动数/模转换器、读入采样数据、数字滤波、越限温度报警和越限处理、PID计算和输出可控硅的触发脉冲等。
引脚上输出的该同步触发脉冲宽度由T1计数器的溢出中断控制,8031利用等待T1溢出中断的空闲时间(形成输出脉冲顶宽)完成把本次采样值转换成显示值而放入显示单元缓冲区和调用温度显示程序。
8031从T1中断服务程序返回后即可恢复现场和返回主程序。
主要子服务程序框图
主要服务子程序包括温度检测采样及数字滤波子程序、带符号双字节乘法子程序和标度转换子程序目的是把实际采样取得的二进制值转换成BCD码形式的温度值,然后存放到显示缓冲区中,供显示子程序调用。
图4中断服务程序框图
对于一般线性仪表来说,标度转换公式为:
Tx=A0 + (Am-A0)
其中,A0为一次测量仪表的下限;Am为一次测量仪表的上限;Vx 为实际测量值(工程量);Vm为仪表上限对应的数字量;V0为仪表下限对应的数字量。
4 其它控制算法
不同的控制对象,所采用的算法有所不同。
例如对于热惯性大、时间滞后明显、耦合强、难于建立精确数学模型的大型立式淬火炉,可以采用人工智能模糊控制算法,通过对淬火炉电热元件通断比的调节,实现对炉温的自动控制,也可以采用仿人智能控制(SHIC)算法和PID控制算法的联合控制方案,实际应用时应灵活运用。
5结束语
MCS-51单片机,体积小,重量轻,抗干扰能力强,对环境要求不高,价格低廉,可靠性高,灵活性好,即使是非电子计算机专业人员,通过学习一些专业基础知识以后也能依靠自己的技术力量,来开发所希望
的单片机应用系统。
本文的温度控制系统,只是单片机广泛应用于各行各业中的一例,相信读者会依靠自己的聪明才智,使单片机的应用更加广泛化。
参考文献
[1] 陈明荧.8051单片机课程设计实训教材北京:清华大学出版社2004
[2] 胡汉才.单片机原理及其接口技术北京:清华大学出版社1995
[3] 徐淑华程退安姚万生.单片机微型机原理及应用哈尔滨工业大学出版社1994。