可自动校准的时钟(PC)
自动校准时钟操作方法

自动校准时钟操作方法
自动校准时钟通常需要通过接收无线信号来获取准确的时间。
以下是一般的自动校准时钟操作方法:
1. 打开自动校准功能:在时钟上找到设置按钮或者菜单,选择自动校准功能并打开。
2. 选择无线信号:时钟将自动搜索可用的无线信号,选择一个可用的信号源(例如无线电波、Wi-Fi或GPS)来校准时间。
3. 等待校准:时钟将开始接收信号并校准时间。
这可能需要几秒钟甚至几分钟的时间,取决于信号的强度和环境条件。
4. 验证校准结果:一旦时钟成功接收到信号并校准时间,可以通过查看时钟上的时间来验证校准结果。
值得注意的是,自动校准时钟的具体操作方法可能会因为不同品牌或型号的时钟而有所不同。
建议参考具体的产品说明书或者联系制造商获取更详细的操作指南。
uninx 时间校准命令 -回复

uninx 时间校准命令-回复"Unix时间校准命令"是Unix操作系统中用于校准系统时钟的命令。
时钟是操作系统中非常重要的组成部分,它用于跟踪系统时间,记录事件发生的顺序以及执行程序的计时等。
在Unix系统中,时钟的精度和准确性对于许多应用程序和系统任务的正确执行至关重要。
本文将介绍Unix系统中常用的时间校准命令,并提供一步一步的操作指南。
Unix系统中常用的时间校准命令主要包括"date"、"ntpdate"、"adjtime"和"hwclock"。
第一步:使用"date"命令设置或查看系统时间"date"命令是Unix系统中用于设置或查看系统时间的常用命令。
在命令行中输入以下命令,以查看当前系统时间:date该命令将输出当前时间和日期。
要设置系统时间,您可以使用以下命令格式:date MMDDHHMMYYYY.SS其中,MM代表月份,DD代表日期,HH代表小时,MM代表分钟,YYYY代表年份,SS代表秒。
例如,要将系统时间设置为2022年5月13日14点30分30秒,您可以使用以下命令:date 0513********.30请注意,为了更改系统时间,您需要root或超级用户权限。
第二步:使用"ntpdate"命令使用网络校准系统时间"ntpdate"命令允许您使用网络时间协议(NTP)服务器来校准系统时钟。
NTP是一种用于同步计算机时钟的协议,它可以从互联网上的时间服务器获取准确的时间信息。
要使用"ntpdate"命令,您可以在命令行中输入以下命令格式:ntpdate [NTP服务器地址]其中,[NTP服务器地址]是一个可选参数,用于指定要使用的NTP服务器。
如果不指定服务器地址,则命令将使用默认的NTP服务器。
ntp时间同步机制
NTP(Network Time Protocol)时间同步机制是一种用于同步计算机系统时钟的协议。
它通过互联网或其他网络环境,使计算机能够与指定的时间服务器进行通信,自动校准和同步系统时钟。
NTP时间同步机制在很多场景中都有广泛应用,如分布式系统、云计算、物联网等。
NTP时间同步机制的核心原理是利用时间戳和时间偏移来计算时间差,从而实现系统时钟的自动校准和同步。
具体来说,NTP客户端会向时间服务器发送请求,获取当前的时间值,并记录下发送请求的时间戳;时间服务器接收到请求后,会返回当前的时间值和收到请求的时间戳;NTP客户端根据这些信息计算出时间偏移和延迟,然后调整本地系统时钟,使其与时间服务器的时间保持一致。
NTP时间同步机制的特点如下:
1. 准确度高:NTP时间同步协议可以自动校准和同步系统时钟,使计算机系统的时间准确度达到毫秒级甚至更高。
2. 可靠性高:NTP协议具有很强的容错性和鲁棒性,即使在网络环境不稳定的情况下也能保证时间同步的可靠性。
3. 适用性强:NTP时间同步机制可以在各种操作系统和硬件平台上运行,通过配置不同的参数来满足不同的需求。
4. 可扩展性强:随着云计算、物联网等技术的发展,越来越多的设备和系统需要时间同步功能。
NTP协议可以通过扩展和定制来满足不同规模和需求的时间同步应用。
总之,NTP时间同步机制是一种非常有效和可靠的时间同步协议,可以广泛应用于各种场景中,保证计算机系统的时间准确性和一致性。
用铷原子钟对PC进行时间校准及其误差分析

此, 综合考虑各种方案 , 采用外部校准时间 的方法提 高 P c时 间的准确度 。通过 时间间隔测量的方法获得 了作为校 准时间结果 的钟差值 , 并对实验结果做 了详细分析。测试结果 表明 ,c与 铷钟同步标 准偏差 小 于 1 s P m 。经过 时间 校准后 的 P c可 以作 为网络时间服务器 。
( a lt N vgtnR D C n r col f l t ncSineadeg er g S tle aiao & et ,Sho o Ee r i cec n ni e n , e i i e co n i
N t nl nvri f e neT cnlg , hnsa 103 ai a U i s y f s ehooy C agh 0 7 ) o e to D e 4
A s a t T e P r nlcm u r P b t c h es a o p t ( C)ss m t e i poie y teR C oc lt .I i e r o e yt i s rv d b T sia r t t e m d h lo s m
t a h t n a d d va in o v c r nia in e r r b t e he P a d t e r i um lc S l s h n h tt e sa d r e ito f s n h o z t ro e we n t C n h ubdi o c o k i e s t a 1 .Afe i ai r to ms tr t me c lb a in。t alb e s a newo k tme s r e . he PC c l e us d a t r i ev r Ke r s P ro a o u e Ti ai r to T me i tr a a u e n T me s r e y wo d e s n 】c mp tr me c lb a in i n e v lme s r me t i ev r
微电脑全自动打铃仪

KG3022T微电脑全自动打铃仪功能和用途本产品以高性能微电脑芯片为核心,可根据用户设定进行自动打铃,一天内最多可实现46次打铃,并为用户提供时钟自动校准功能,具有走时准确、操作方便等特点,广泛应用于学校企事业单位的自动打铃控制。
性能指标工作电源220V/50Hz适用电压范围 160V~240V消耗功率 <3W外形尺寸 179×139×66mm重量 1100g计时误差 <±0.5秒/天闹钟时间0~59秒工作模式:每日相同、每日不同、五天工作制、六天工作制有46组闹铃时间,手动、自动两用显示屏说明星期含义如下所示:Su Mo Tu We Th Fr Sa星期日星期一星期二星期三星期四星期五星期六其它说明1、若临时要求终止执行自动打铃程序,在时钟动行状态,按S键一次,“”静止,使打铃程序冻结,若要恢复执行自动打铃程序,再按S键一次使“”闪烁,表示打铃仪自动打铃程序开始工作;2、若临时需打铃,可在时钟运行状态下按“-”(减数键)手动打铃或按产品背面有“开/关”键;3、在打铃状太下需临时终止打铃,按任意键均可;4、若打铃仪发生意外故障(如死机等),不能正常打铃,可用产品背面的开关手动打铃,再按照“故障排除”中介绍的方法排除故障;5、长期不使用本产品,请将产品后面的锁调到“关”状态,以节约电源。
操作说明(一)按键说明本产品的操作提供五个按键,分别是:M功能键:按此键转换显示屏显示内容,实现时钟运行状态、时钟设置状态、参数设置状态、定时设置状态的转换;S选择键:按此键选择某种功能中需要调整设置的各个参数;+加数键:对选中的项目向上加数(即实现递增变化);-减数键:对选中的项目向下减数(即实现递减变化),在时钟运行状态可实现手动打铃;复位键:清除所有设置,回到系统初始状态,即显示屏处于时钟运行状态,当前时间为10:00、星期日、打铃时长为10S、工作模式为每日相同、无打铃设置。
基于STC89C52多功能电子时钟系统程序+原理图

一、设计任务设计制作一台以控制器为核心的多功能电子时钟系统二、设计要求:①.系统具有3种工作模式状态(正常时钟显示模式、系统校准模式、秒表计时模式);系统所有功能,均能够通过上位PC机对其操作修改与实时动态显示。
(PC主机端可利用高级语言进行人机界面设计)②.在正常时钟显示模式时,时钟具有显示年、月、日、时、分、秒的功能。
③.在正常时钟显示模式时,系统具有整点报时的功能,在离整点前10秒时,自动发出鸣叫声,步长1秒,每间隔1秒鸣叫一次,前4响是低音,后1响为高音,共鸣叫5次,最后1响结束时为整点。
高音频率为1KHz;④.在系统校准模式时,系统具有快速校准时间的功能。
⑤.在秒表计时模式时,可兼做比赛时间记录表。
秒表记时的精度为0.1秒,由3个键分别控制秒表的启动、清零、记录功能,可连续记录3组时间,并能够显示记录时间。
⑥.系统显示器采用LCD液晶显示器1602或其它显示器件,并采用键盘对相关数据进行设置与操作。
原理图设计制作一台以控制器为核心的多功能电子时钟系统二、设计要求:①.系统具有3种工作模式状态(正常时钟显示模式、系统校准模式、秒表计时模式);系统所有功能,均能够通过上位PC机对其操作修改与实时动态显示。
(PC主机端可利用高级语言进行人机界面设计)(注:此三种模式可以通过SET键盘来回切换,在正常时钟模式,第二排显示S:time,校准模式显示S:adjst,秒表模式,是TN~T3:四个秒表模式);②.在正常时钟显示模式时,时钟具有显示年、月、日、时、分、秒的功能。
(注:这个已经全部显示了,含星期)③.在正常时钟显示模式时,系统具有整点报时的功能,在离整点前10秒时,自动发出鸣叫声,步长1秒,每间隔1秒鸣叫一次,前4响是低音,后1响为高音,共鸣叫5次,最后1响结束时为整点。
高音频率为1KHz;(注:这个都实现了,要验证的话就是将时钟调整到59分后验证即可)④.在系统校准模式时,系统具有快速校准时间的功能。
电波钟机芯工作原理
电波钟机芯工作原理一、引言电波钟是一种可自动与原子钟校准时间的时钟,它能通过接收无线电信号来同步时间,以确保精确度。
本文将详细介绍电波钟的机芯工作原理。
二、时钟机芯组成电波钟的机芯是时钟的核心组成部分,它包括以下几个主要构件:1. 指针:用于指示时、分、秒的位置。
2. 电源:提供能量给机芯运转,通常使用电池或者电源适配器。
3. 振荡器:产生稳定的频率,通常使用晶体振荡器。
4. 驱动装置:将振荡器的信号传输给指针,驱动指针进行转动。
三、电波锁定与同步电波钟通过接收无线电信号来同步时间,并锁定到最准确的时间来源。
它通常使用选用当地的国家标准时间信号,如日本的JJY、美国的WWVB等。
当电波钟接收到信号时,它会校准内部时钟与无线电信号之间的差异,以保持时间的准确性。
四、机芯工作原理电波钟的机芯工作原理如下:1. 振荡器工作:机芯中的晶体振荡器会产生一个固定频率的信号,通常为32,768赫兹。
这个频率高度稳定且准确,可以作为时钟的基准。
2. 分频器的作用:分频器将振荡器的信号分频为1赫兹,以便与秒针的运动保持同步。
分频器会将振荡器的频率除以32,768,即每32,768个振荡周期生成一个脉冲信号。
3. 驱动指针:机芯中的驱动装置会根据分频器的脉冲信号来驱动指针的转动。
脉冲信号会通过齿轮系统进行传递,从而以恒定的速度驱动指针进行旋转。
4. 无线电接收:机芯的另一个重要组成部分是无线电接收装置。
它会接收来自国家标准时间信号的无线电波,并将信号传递给机芯内部的接收电路。
5. 校准与锁定:机芯内部的接收电路会将接收到的无线电信号解码并校准内部时钟。
当信号强度弱或者无法接收到信号时,机芯会保持内部时钟的运行,直到接收到信号并进行校准。
一旦接收到信号,机芯就会锁定到最准确的时间来源。
五、优势和应用电波钟机芯的工作原理赋予其许多优势和应用,包括:1. 高精确性:电波钟能够通过锁定到国家标准时间信号来实现高度准确的时间显示,误差范围通常在数毫秒以内。
电脑时钟校准规程
电脑时钟校准是确保计算机系统时间准确性的重要步骤。
以下是一个常见的电脑时钟校准规程示例:1.选择时间源:确定计算机所使用的时间源,可以是互联网时间服务器、本地时间服务器、GPS等。
建议选择可靠并与标准时间同步的时间源。
2.校准频率:确定电脑时钟的校准频率,即多久进行一次校准。
通常情况下,每天进行一次校准已经足够满足大部分应用的需求。
3.校准方法选择:根据操作系统和计算机硬件的不同,选择适合的校准方法。
常见的方法包括手动校准、自动校准和通过网络时间协议(NTP)自动同步校准等。
4.手动校准:如果选择手动校准,按照以下步骤进行操作:●打开日期和时间设置界面。
●使用正确的日期和时间手动调整电脑时钟。
●确认调整后的时间是否准确。
5.自动校准:如果选择自动校准,按照以下步骤进行操作:●打开日期和时间设置界面。
●启用自动时间校准选项。
●选择合适的时间源和校准频率。
●确认自动校准功能是否正常工作。
6.NTP同步校准:如果选择使用NTP协议进行时间同步,按照以下步骤进行操作:●安装并配置NTP客户端软件或服务。
●设置NTP服务器地址和校准频率。
●启动NTP客户端并确保与NTP服务器建立连接。
●检查系统时间是否被正确同步。
7.监测和纠正:定期监测计算机时钟的准确性,并根据需要进行纠正。
如果发现时钟偏差较大,可以手动或自动重新校准。
8.记录和报告:记录每次校准的时间、方法和结果,并生成相应的校准报告。
这样可以帮助追踪时钟的准确性和校准历史。
请注意,以上仅为示例规程,实际的电脑时钟校准规程可能会因具体应用和环境而有所不同。
建议根据实际需求制定适合自己计算机系统的时钟校准规程,并确保校准过程的准确性和可靠性。
可校准的实时时钟原理与测试说明
“可校准的实时时钟”原理与测试说明1 程序设计目标及程序运行效果说明程序设计目标:通过DS1302芯片、晶振、电池和数码管实现实时时钟的数码管显示,并实现实时时钟的时间的准确校准。
程序运行效果说明:将程序下载至芯片,数码管会出现实时的时钟,通过按键key1以及导航键可以实现时间的精确校准。
2程序原理说明及相关电路2.1原理说明本实验在实时时钟的基础上,利用按键Key1以及导航键实现了时间的校准。
程序主要是利用导航按键和数字按键综合校准时钟,利用ADC口对来自导航按键不同方向的电压值进行采集,并将采集后的转换结果获取高三位值,将此值作为导航按键方向判断标准。
导航按键是通过ADC采集电压的改变从而判断按下的方向,而数字按键是通过电平的直接改变判断是否按下。
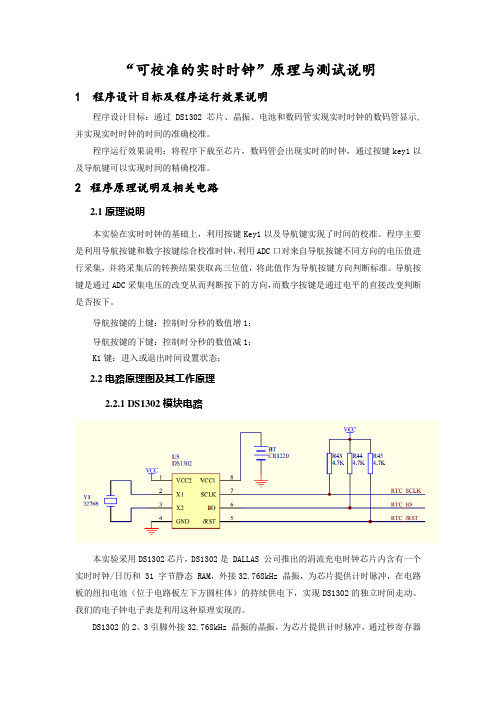
导航按键的上键:控制时分秒的数值增1;导航按键的下键:控制时分秒的数值减1;K1键:进入或退出时间设置状态;2.2电路原理图及其工作原理2.2.1 DS1302模块电路本实验采用DS1302芯片,DS1302是 DALLAS 公司推出的涓流充电时钟芯片内含有一个实时时钟/日历和 31 字节静态 RAM,外接32.768kHz 晶振,为芯片提供计时脉冲,在电路板的纽扣电池(位于电路板左下方圆柱体)的持续供电下,实现DS1302的独立时间走动。
我们的电子钟电子表是利用这种原理实现的。
DS1302的2、3引脚外接32.768kHz 晶振的晶振,为芯片提供计时脉冲,通过秒寄存器的最高位控制晶振的工作状态,当为高时,停止工作;当为低时,晶振开始工作,实时模块自动计时。
RTC_SCLK 引脚作为输入引脚,用于在串行接口上控制数据的输入与输出 RTC_IO 引脚作为输入输出引脚,为实时时钟的数据线。
RTC_/RST 引脚作为输入引脚,在读、写数据时必须置为高电平。
该引脚有两个功 能:第一,CE 开始控制字访问移位寄存器的控制逻辑;其次,CE 提供结束单字节或多字节数据传输的方法,即如图所示: 开始在上升沿按位传输相关地址字读取或者写入相关地址对应的数据字置RTC_/RST 为高置RTC_/RST为低结束DS1302对应的时序:单个字节读:在前8个SCLK 时钟周期内,上升沿写入控制字,在后8个SCLK 时钟周期内,下降沿读取数据字;均从最低位开始。
网络中的时间同步与时钟校准技术

网络中的时间同步与时钟校准技术随着互联网的迅猛发展,时间同步和时钟校准技术在网络中起着至关重要的作用。
准确的时间同步和时钟校准不仅对于确保各个网络设备之间的协作和数据的准确性至关重要,还对于各种网络应用和服务的正常运行具有重要意义。
本文将介绍网络中常用的时间同步与时钟校准技术,并探讨其在网络中的重要性。
一、网络中时间同步的意义在网络中,若各个设备的时间不一致,会导致很多问题。
例如,在分布式系统中,设备之间需要进行协作和数据交换,若设备的时间差异较大,则会导致数据的不一致和错误。
此外,有些网络应用和服务,如金融交易、电子邮件等,对时间的准确性有着极高的要求。
因此,实现网络设备之间的时间同步具有重要的意义。
二、网络中常见的时间同步技术1. NTP(Network Time Protocol)NTP是一种用于在Internet上同步计算机时钟的协议。
它基于分层的客户-服务器架构,并使用时间服务器分发网络上的准确时间。
NTP使用时间戳方式同步时钟,既能够同步服务器和客户端之间的时间,也能够调整时钟的漂移。
NTP广泛应用于各类网络设备和操作系统,是保证网络时间同步的重要技术之一。
2. PTP(Precision Time Protocol)PTP是一种用于实时系统中进行时间同步的协议。
它旨在提供更高的时间精度和更低的时延。
PTP使用同步消息和延迟请求/响应消息来进行时间同步。
它适用于对时间精度要求较高的领域,如工业自动化、电力系统等。
PTP的精度可以达到亚微秒级别,可以满足高精度时间同步的需求。
三、网络中常见的时钟校准技术1. SNTP(Simple Network Time Protocol)SNTP是NTP的简化版本,旨在提供基本的时间同步功能,对时间精度和稳定性要求不高。
SNTP一般用于对时间同步要求不高的设备,如部分网络摄像头、路由器等。
相比于NTP,SNTP的实现简单、轻量化,占用资源较少。
2. GPS(Global Positioning System)GPS是一种基于卫星的全球定位系统,也可用于时钟校准。
时钟自动校准电路及方法

时钟自动校准电路及方法时钟自动校准电路及方法是一种用于自动调整时钟精度的系统,它可以通过各种传感器和算法来确保时钟的准确性,并在需要时进行自动校准。
以下是关于时钟自动校准电路及方法的50条描述:1. 时钟自动校准电路可以通过GPS接收器来自动获取准确的时间信号,以确保时钟的精度。
2. 可以使用无线信号(如无线电波)来同步时钟,以便校准时钟并保持精度。
3. 时钟自动校准电路可以配备温度传感器,以便监测环境温度对时钟精度的影响,并相应地进行校准。
4. 光传感器也可以用于时钟自动校准电路,以侦测光线条件对时钟的影响,并进行相应的调整。
5. 时钟自动校准电路可以通过加速度传感器监测设备的加速度变化,从而调整时钟以适应不同的运动状态。
6. 可以使用气压传感器来监测大气压力变化,以进一步提高时钟的准确性。
7. 时钟自动校准电路通常包括一个微控制器,用于处理传感器数据并进行相应的调整。
8. 温度补偿电路可以用于校准时钟,以抵消温度对时钟振荡器频率的影响。
9. 时钟自动校准电路还可以包括振荡器自动校准电路,用于自动调整振荡频率以保持时钟的准确性。
10. 在无法获得外部时间信号的情况下,时钟自动校准电路可以通过内部算法来估算时间漂移,并进行相应的校准。
11. 可以使用声音传感器来检测环境噪音水平,以调整时钟以适应不同的声音条件。
12. 采用无线网络连接的时钟可以通过网络时间协议(NTP)自动获取准确的时间信息并进行校准。
13. 可以利用地磁传感器来补偿磁场对时钟的影响,以保证时钟在不同地点的准确性。
14. 时钟自动校准电路可以包括电源管理模块,用于确保电源波动对时钟的影响不会导致时钟失准。
15. 可以通过同步脉冲信号来校准时钟,以确保时钟在需要时始终与其他设备同步。
16. 时钟自动校准电路还可以包括故障检测模块,用于监测各种传感器和电路的故障,并进行相应的处理。
17. 局域网中的时钟可以通过网络同步协议(NTP)实现自动校准,以确保与其他设备的时间一致。
时钟自动校准电路及方法
时钟自动校准电路及方法时钟自动校准电路及方法是一种用于确保时钟准确性和稳定性的系统,通常应用于各种电子设备中。
以下是关于时钟自动校准电路及方法的50条详细描述:1. 时钟自动校准电路基本原理是利用外部参考信号或者内部振荡器信号,通过反馈控制来调整时钟频率,以保持时钟的准确性。
2. 该电路通常包括一个比较器,用于将参考信号与时钟信号进行比较,并产生一个误差信号。
3. 误差信号会被传递给一个数字控制电路,根据误差信号的大小和方向来调整时钟的频率。
4. 最常见的自动校准方法是通过PLL(锁相环)技术来实现,其中反馈控制信号会调整振荡器的频率,使其与参考信号保持同步。
5. 该电路还可以包括一个数字-模拟转换器(DAC),用于将数字控制信号转换为模拟电压信号,从而调整振荡器的频率。
6. 时钟信号的频率调整可以通过微调频率合成器的控制电压实现。
这样可以在精确度和稳定性之间进行权衡。
7. 在某些情况下,外部参考信号可能是GPS信号或者其他可靠的时钟源,以确保系统时钟与外部参考保持同步。
8. 除了频率校准,电路还可以进行相位校准,确保时钟的相位与参考信号保持一致。
9. 自动校准电路通常会包括一个反馈环路,用于动态地调整时钟频率和相位,以应对温度变化、老化和其他外部干扰因素。
10. 电路还可以包括一个温度传感器,用于监测环境温度变化,并根据温度变化来调整时钟频率,以确保在不同温度下时钟的准确性。
11. 时钟自动校准电路的设计需要考虑对系统的干扰最小化,以确保在调整时钟频率时不会引入额外的噪音或抖动。
12. 特定的校准算法或逻辑可以应用于数字控制电路,以确保校准的稳定性和快速响应性。
13. 电路设计应考虑功耗和成本等因素,以确保在保持时钟准确性的不会引入过多的额外开销。
14. 时钟自动校准电路还应具有自我诊断的功能,以实时监测时钟的性能,并在发现异常情况时进行自动修正。
15. 对于某些特殊应用,时钟自动校准电路还可以具有多通道输入和输出,以确保对多个时钟信号进行同步校准。
关于STM32中RTC的校准方法
关于STM32中RTC的校准方法STM32微控制器系列中的RTC(Real-Time Clock,实时时钟)模块是一个用于提供实时时间和日期的硬件模块。
RTC的主要目的是在系统掉电后仍能持续运行并保持时间的准确性。
RTC的校准对于确保时间的准确性非常重要,特别是在长时间运行的应用中。
下面将介绍STM32中RTC的校准方法。
1.温度测量校准法(TM)RTC的精度受温度的影响,因此STM32的RTC模块提供了温度测量校准法来校准RTC的误差。
该方法需要在特定温度下测量RTC与基准时钟的误差,并将结果作为温度补偿参数存储在RTC寄存器中。
然后,STM32会使用这些参数来自动调整RTC的误差,并提供更准确的时间。
2.外部时钟校准法(EC)RTC模块可以通过外部时钟源进行校准。
在这种方法中,外部时钟源将与RTC的基准时钟进行比较,并通过调整RTC的预分频器和分频器参数来校准RTC的误差。
外部时钟源可以是一个精确的频率信号源,例如陶瓷谐振器或外部晶振。
3.自动校准调整法(ACA)STM32的RTC模块还提供了自动校准调整法。
该方法利用自带的时钟源对RTC进行周期性校准。
STM32会利用周期性的准确时间源与RTC进行比较,并通过调整RTC的预分频器和分频器参数来校准RTC的误差。
这种方法非常适用于长时间运行的应用,可以保持RTC的准确性。
除了上述方法外,还可以通过以下附加步骤来提高RTC的校准精度:1.外部参考时钟源:使用精确的外部参考时钟源,如GPS或网络时间协议(NTP),可以提供更准确的时间校准。
2.温度补偿:根据测量到的温度与RTC的准确度之间的关系,可以为RTC实现温度补偿。
这样,在温度变化时,RTC的准确度会得到调整。
3.周期性校准:定期进行RTC的校准,以确保其准确性。
可以根据应用的要求选择适当的校准时间间隔。
总结起来,STM32中RTC的校准方法包括温度测量校准法、外部时钟校准法和自动校准调整法。
常用时钟芯片
常用时钟芯片
时钟芯片是一种用于计时、控制电子设备时间的电子元器件。
在现代电子产品中,时钟芯片广泛应用于各种计时、同步、调整时钟等方面。
下面介绍几种常用的时钟芯片。
1. DS1302时钟芯片
DS1302是一种低功耗的实时时钟芯片,具有时钟、日历、定时器等功能。
该芯片采用2线串行接口,非常容易与微控制器进行通信。
DS1302还具有电池备份功能,即使在断电情况下,它也能保持计时功能。
2. DS3231时钟芯片
DS3231是一种高精度的实时时钟芯片,具有比DS1302更高的精度和稳定性。
它可以实现1秒以内的精确计时,而且具有自动校准功能,可以校准温度偏移和晶体振荡器频率漂移。
此外,DS3231还具有电池备份功能、温度传感器和掉电检测功能。
3. PCF8563时钟芯片
PCF8563是一种低功耗实时时钟芯片,具有高精度和稳定性。
它采用I2C接口,容易与微控制器进行通信。
该芯片可以实现从年份到秒的计时,并具有电池备份功能,即使在断电情况下,它也能保持计时功能。
4. MCP7940N时钟芯片
MCP7940N是一种低功耗实时时钟芯片,具有高精度和稳定性。
它采用I2C接口,容易与微控制器进行通信。
该芯片可以实现从年份
到秒的计时,并具有电池备份功能、掉电检测功能和256字节的EEPROM存储器。
总结:时钟芯片是现代电子产品中不可或缺的一部分,它们能够提供高精度的计时和稳定的时钟信号,使电子设备更加可靠和实用。
常用的时钟芯片有DS1302、DS3231、PCF8563和MCP7940N等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
timeinfo=localtime(&rawtime);
timeArray[6]='a';
timeArray[5]=(timeinfo->tm_hour)/10;
timeArray[4]=(timeinfo->tm_hour)%10;
timeArray[3]=(timeinfo->tm_min)/10;
return 0;
setDCB(dcb);
if (!SetCommState(hCom, &dcb)) //DCB绑定失败返回
return 0;
if (!SetupComm(hCom,1024,1024))//设置串口读写缓冲区[1024]byte 失败返回
return 0;
timeouts.ReadTotalTimeoutMultiplier=500;
timeouts.ReadTotalTimeoutConstant=5000;
timeouts.WriteTotalTimeoutMultiplier=500;
timeouts.WriteTotalTimeoutConstant=2000;
if(buf[0]==52)
{
getSysTime();
sendTime();
}
//printf("%s",buf);
}
HANDLE openCom()
{
HANDLE hCom;
hCom=CreateFile("COM1",
GENERIC_READ|GENERIC_WRITE,
WriteFile(hCom,c,1,&dwWrite,NULL);
}
void sendTime()
{
//sendData(&timeArray[6]);
for(int i=0;i<6;i++)
{
sendData(&timeArray[i]);
//printf("%d ",timeArray[i]);
while (1)
{
readData();
}
}
}
printf("Send time success!\n");
}
void readData()
{
unsigned char buf[128]={0};
DWORD dwRead;
if(!ReadFile(hCom,buf,1,&dwRead, NULL))
return;
timeArray[2]=(timeinfo->tm_min)%10;
timeArray[1]=(timeinfo->tm_sec)/10;
timeArray[0]=(timeinfo->tm_sec)%10;
}
void sendData(unsigned char* c)
{
DWORD dwWrite;
//PurgeComm(hCom, PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR);
//DWORD ComWriteReturn;
//WriteFile(hCom,buf,32,&ComWriteReturn,NULL); //将buf内的数据写入串口32字节
return timeouts;
}
void setDCB(DCB dcb)
{
dcb.BaudRate = CBR_9600; //波特率设置19200
dcb.ByteSize = 8; //数据位8位
dcb.Parity = NOPARITY;
dcb.StopBits = ONESTOPBIT; //1个停止位
{
return 0;
}
COMMTIMEOUTS timeouts=getTimeout(); //串口超时结构体设置
if(!SetCommTimeouts(hCom,&timeouts)) //与串口绑定 失败返回
return 0;
DCB dcb;
if(!GetCommState(hCom,&dcb)) //获取当前DCB
dcb.fBinary=1;
dcb.fParity=0;
}
int main()
{
getSysTime();
hCom=openCom();
unsigned char buf[128]; //要传输串口数据缓冲区
if(hCom==(HANDLE)-1)//打开串口失败返回
#include "windows.h"
#include "stdio.h"
#include <time.h>
HANDLE hCom;
unsigned char timeArray[7];
void getSysTime()
{
time_t rawtime;
struct tm* timeinfo;
0,
NLL);
return hCom;
}
COMMTIMEOUTS getTimeout()
{
COMMTIMEOUTS timeouts; //串口超时结构体设置
timeouts.ReadIntervalTimeout=1000; //填充TimeOuts