【CN109889982A】定位导航数据采集系统及方法【专利】
【CN109889778A】一种地理信息采集系统【专利】
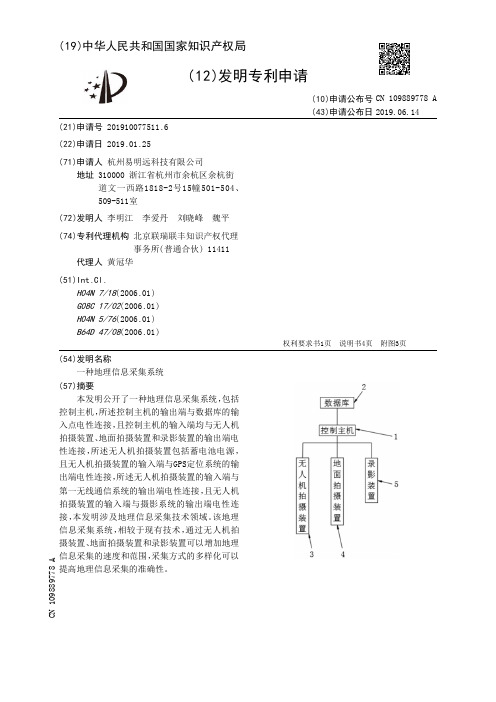
( 57 )摘要 本发明公开了一种地理信息采集系统 ,包括
控制主机,所述控制主机的输出端与数据库的输 入点电性连接,且控制主机的输入端均与无人机 拍摄装置、地面拍摄装置和录影装置的输出端电 性连接 ,所述无人机 拍摄装置包括蓄电 池电 源 , 且无人机拍摄装置的输入端与GPS定位系统的输 出端电性连接,所述无人机拍摄装置的输入端与 第一无线通信系统的输出端电性连接,且无人机 拍摄装置的 输入端 与摄影 系统的 输出端电 性连 接 ,本发明涉及地理 信息采集技术领域。该地理 信息采集 系统 ,相较于现有技术 ,通过无人机 拍 摄装置、地面拍摄装置和录影装置可以增加地理 信息采集的速度和范围 ,采集方式的多样化可以 提高地理信息采集的准确性。
( 19 )中华人民 共和国国家知识产权局
( 12 )发明专利申请
(21)申请号 201910077511 .6
(22)申请日 2019 .01 .25
(71)申请人 杭州易明远科技有限公司 地址 310000 浙江省杭州市余杭区余杭街 道文一西路1818-2号15幢501-504、 509-511室
发明内容 [0004] 针对现有技术的不足,本发明提供了一种地理信息采集系统,解决了现有的地理 信息采集系统的 采集手段单一 ,采集的效率低下 ,并且获取 信息单一 ,随 着科技的发展 ,无 人机的 技术也愈发成熟 ,地理 信息采集 系统可以 和无人机进行结合 ,利 用无人的 特点对地 理信息进行采集,以提高采集效率,降低工作人员的劳动强度的问题。 [0005] 为实现以上目的,本发明通过以下技术方案予以实现:一种地理信息采集系统,包 括控 制主机 ,所述控 制主机的 输出端与数据库的 输入点电 性连接 ,且控 制主机的 输入端均 与无人机拍摄装置、地面拍摄装置和录影装置的输出端电性连接,所述无人机拍摄装置包 括蓄电池电源,且无人机拍摄装置的输入端与GPS定位系统的输出端电性连接,所述无人机 拍摄装置的输入端与第一无线通信系统的输出端电性连接,且无人机拍摄装置的输入端与 摄影系统的输出端电性连接,所述第一无线通信系统的输出端与信号发射模块的输入端电 性连接 ,且第一无线通信系统的 输入端与信号接收 模块的 输出端电 性连接 ,所述摄影 系统 包括第一摄影模块 、第一数据储存模块 和数据转码模块 ,且摄影 系统的 输入端与第一摄影 模块、第一数据储存模块和数据转码模块的输出端电性连接。 [0006] 优选的,所述控制主机包括供电装置,且控制主机的输入端与有线通信系统和第 二无线通信系统的输出端电性连接,所述控制主机的输出端与数据转换模块的输入端电性 连接。 [0007] 优选的,所述地面拍摄装置包括第一供电电池,且地面拍摄装置的输出端与第一 数据传输模块的输入端电性连接,所述地面拍摄装置的输入端与第二摄影模块和第二数据 储存模块的输出端电性连接。
一种数据采集方法及系统[发明专利]
![一种数据采集方法及系统[发明专利]](https://img.taocdn.com/s3/m/9f931c2008a1284ac9504329.png)
专利名称:一种数据采集方法及系统专利类型:发明专利
发明人:王家海,国靖,祖佳征
申请号:CN202010848112.8
申请日:20200821
公开号:CN112000309A
公开日:
20201127
专利内容由知识产权出版社提供
摘要:本发明涉及数据采集领域,具体提供了一种数据采集方法,具有以下步骤:S1、制定需求;S2、生成采集脚本;S3、脚本验证;S4、脚本自动化生成工具优化;S5、脚本上线;S6、数据巡检及数据质量核查。
与现有技术相比,本发明的一种数据采集方法,可以解决数据分散、脏数据的问题,且能大大提升数据采集的效率,具有良好的推广价值。
申请人:浪潮卓数大数据产业发展有限公司
地址:214029 江苏省无锡市滨湖区高浪东路999号(软件研发大厦)707
国籍:CN
代理机构:济南信达专利事务所有限公司
代理人:姜鹏
更多信息请下载全文后查看。
【CN109981168A】一种地理信息自动采集的故障定位器及采集方法【专利】
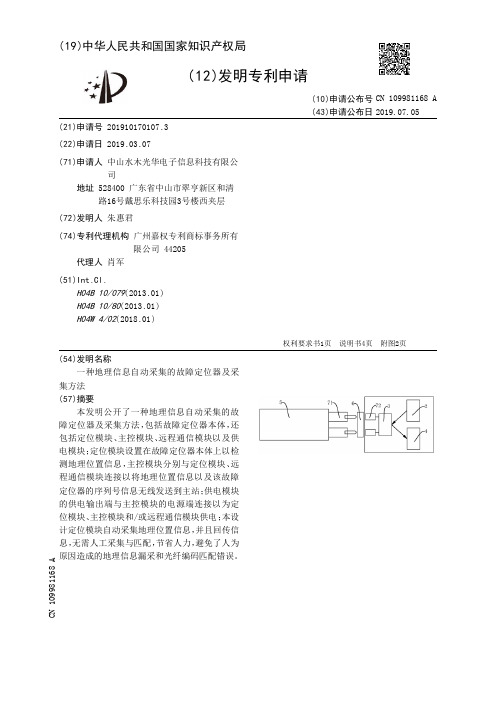
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910170107.3(22)申请日 2019.03.07(71)申请人 中山水木光华电子信息科技有限公司地址 528400 广东省中山市翠亨新区和清路16号戴思乐科技园3号楼西夹层(72)发明人 朱惠君 (74)专利代理机构 广州嘉权专利商标事务所有限公司 44205代理人 肖军(51)Int.Cl.H04B 10/079(2013.01)H04B 10/80(2013.01)H04W 4/02(2018.01)(54)发明名称一种地理信息自动采集的故障定位器及采集方法(57)摘要本发明公开了一种地理信息自动采集的故障定位器及采集方法,包括故障定位器本体,还包括定位模块、主控模块、远程通信模块以及供电模块;定位模块设置在故障定位器本体上以检测地理位置信息,主控模块分别与定位模块、远程通信模块连接以将地理位置信息以及该故障定位器的序列号信息无线发送到主站;供电模块的供电输出端与主控模块的电源端连接以为定位模块、主控模块和/或远程通信模块供电;本设计定位模块自动采集地理位置信息,并且回传信息,无需人工采集与匹配,节省人力,避免了人为原因造成的地理信息漏采和光纤编码匹配错误。
权利要求书1页 说明书4页 附图2页CN 109981168 A 2019.07.05C N 109981168A权 利 要 求 书1/1页CN 109981168 A1.一种地理信息自动采集的故障定位器,包括故障定位器本体,其特征在于,还包括:定位模块,设置在故障定位器本体上以检测地理位置信息;主控模块以及远程通信模块,主控模块分别与定位模块、远程通信模块连接以将地理位置信息以及该故障定位器的序列号信息无线发送到主站;供电模块,供电模块的供电输出端与主控模块的电源端连接以为定位模块、主控模块和/或远程通信模块供电。
【CN109885633A】一种地理信息系统数据采集升级系统【专利】
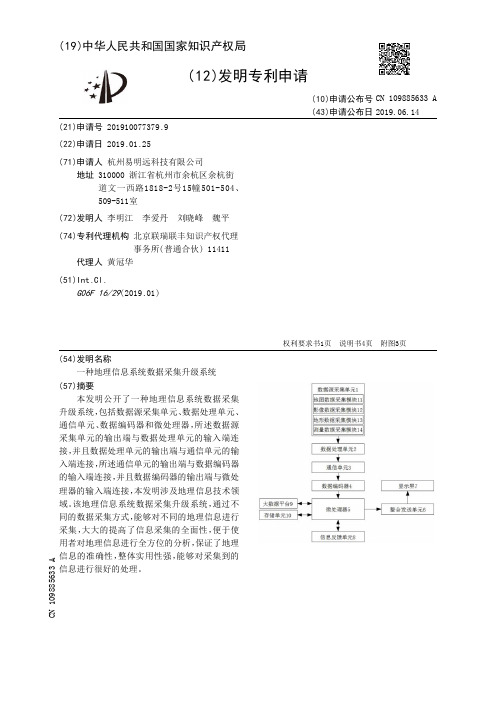
发明内容 [0004] 针对现有技术的不足,本发明提供了一种地理信息系统数据采集升级系统,解决 了数据采集升级系统数据采集不够全面且信息处理不是很好的问题。 [0005] 为实现以上目的,本发明通过以下技术方案予以实现:一种地理信息系统数据采 集升级系统,包括数据源采集单元、数据处理单元、通信单元、数据编码器和微处理器,所述 数据源采集单元的输出端与数据处理单元的输入端连接,并且数据处理单元的输出端与通 信单元的 输入端连接 ,所述通信单元的 输出端与数据编码器的 输入端连接 ,并且数据编码 器的输出端与微处理器的输入端连接,所述数据源采集单元包括地图数据采集模块、影像 数据采集模块 、地形数据采集模块 和测量数据采集模块 ,所述微处理器的 输出端与整合发 送单元的 输出端连接 ,并且整合发送单元的 输出端与显示屏的 输入端连接 ,所述微处理器 与信息反馈单元之间实现双向连接 ,所述数据处理单元包括 信息分析单元 、错误处理单元 和数据整理单元 ,所述数据分析单元的 输出端与错误处理单元的 输入端连接 ,并且错误处 理单元的输出端与数据整理单元的输入端连接。 [0006] 优选的,所述微处理器与大数据平台之间实现双向连接。 [0007] 优选的,所述微处理器与存储单元之间实现双向连接。 [0008] 优选的,所述地图数据采集模块包括普通地图和专题地图。 [0009] 优选的,所述影像数据采集模块包括卫星遥感模块和航信拍摄模块。
( 57 )摘要 本发明公开了一种地理信息系统数据采集
升级系统 ,包括数据源采集单元、数据处理单元、 通 信单元 、数 据编码器 和微处理器 ,所述数 据源 采集单元的输出端与数据处理单元的输入端连 接,并且数据处理单元的输出端与通信单元的输 入端连接,所述通信单元的输出端与数据编码器 的输入端连接,并且数据编码器的输出端与微处 理器的输入端连接,本发明涉及地理信息技术领 域。该地理 信息 系统数据采集升级系统 ,通过不 同的数据采集方式 ,能够对不同的地理信息进行 采集 ,大大的 提高了信息采集的 全面性 ,便于使 用者对地理信息进行全方位的分析,保证了地理 信息的 准 确性 ,整体实 用性强 ,能 够对采集到的 信息进行很好的处理。
【CN109859611A】地图数据的采集方法装置设备和存储介质【专利】
( 12 )发明专利申请
(21)申请号 201910038106 .3
(22)申请日 2019 .盖凡
(74)专利代理机构 北京同立钧成知识产权代理 有限公司 11205
2
CN 109859611 A
权 利 要 求 书
2/3 页
9 .根据权利要求7所述的方法,其特征在于,还包括: 若所述制图数据的完整性满足所述完整性预设条件,则所述车辆判断各个传感器采集 的制图数据是否满足对应的预设质量要求; 若存在至少一个传感器采集的制图数据不满足对应的预设质量要求,则所述车辆推送 第四提示信息,所述第四提示信息用于提示驾驶员通过不满足对应的预设质量要求的传感 器在所述当前位置重新采集数据。 10 .根据权利要求9所述的方法,其特征在于,所述车辆判断各个传感器采集的制图数 据是否满足对应的预设质量要求,包括: 所述车辆判断各个所述传感器的平均采集帧率或者瞬时采集帧率是否大于预设采集 帧率。 11 .根据权利要求9所述的方法,其特征在于,所述车辆判断各个传感器采集的制图数 据是否满足对应的预设质量要求,包括: 所述车辆判断各个所述传感器采集的制图数据是否满足预设的圈数条件。 12 .根据权利要求1或2所述的方法,其特征在于, 所述车辆为非专用的制图数据采集车辆;所述传感器的成本低于预设成本阈值。 13 .根据权利要求12所述的方法,其特征在于,所述车辆为实际使用的自动驾驶车辆。 14 .一种地图数据的采集方法,其特征在于,包括: 服务器向多个车辆发送采集指令;所述采集指令用于指示多个所述车辆对当前位置进 行数据采集; 所述服务器接收多个所述车辆发送的通过多个传感器采集后的制图数据,并根据所述 制图数据进行制图。 15 .一种地图数据的采集装置,其特征在于,包括: 接收模块,用于接收服务器发送的采集指令; 处理模块,用于根据所述采集指令,通过车辆的多个传感器对当前位置进行数据采集, 并将采集后的制图数据发送给所述服务器。 16 .一种地图数据的采集装置,其特征在于,包括: 发送模块 ,用于向 多个车辆发送采集指令 ;所述采集指令 用于指示多个所述车辆对当 前位置进行数据采集; 接收模块,用于接收多个所述车辆发送的通过多个传感器采集后采集后的制图数据; 处理模块,用于根据所述制图数据进行制图。 17 .一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序 被处理器执行时实现权利要求1-13任一项,或权利要求14所述的方法。 18 .一种电子设备,其特征在于,包括: 处理器;以及 存储器,用于存储所述处理器的可执行指令; 其中 ,所述处理器配置为经由执行所述可执行指令来执行权利要求1-13任一项所述的 方法。 19 .一种服务器,求书3页 说明书8页 附图5页
定位数据采集方法及系统[发明专利]
![定位数据采集方法及系统[发明专利]](https://img.taocdn.com/s3/m/be405380011ca300a7c3905e.png)
专利名称:定位数据采集方法及系统
专利类型:发明专利
发明人:龚正,应忍冬,刘佩林,薛午阳,赵忆漠,缪瑞航申请号:CN202010042905.0
申请日:20200115
公开号:CN111263308A
公开日:
20200609
专利内容由知识产权出版社提供
摘要:本发明提供了一种定位数据采集方法及系统,包括:地图生成模式或任务模式;地图生成模式下:采集平台根据用户手动控制进行多传感器同步建图与定位;根据所建立的地图,采集平台进行地图数据优化后处理以及地图数据储存上传;任务模式下:根据用户选择的当前区域的地图,并在地图中选取标注起始位置辅助系统初始化;初始化完成后,采集平台通过多传感器融合定位算法确定自身位置;初始化完成后,用户向采集平台输入规划的目标路径点。
本发明利用基于图优化的多传感器定位算法提升了无人采集平台在复杂环境下的定位健壮性,使得数据采集平台在复杂场景下仍然可以进行鲁棒的定位而不失效。
申请人:上海交通大学
地址:200240 上海市闵行区东川路800号
国籍:CN
代理机构:上海汉声知识产权代理有限公司
代理人:胡晶
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910176664.6
(22)申请日 2019.03.08
(71)申请人 芋头科技(杭州)有限公司
地址 310000 浙江省杭州市余杭区五常街
道西溪艺术集合村莲公荡路10号101
室
(72)发明人 吕诚 霍志宇
(74)专利代理机构 北京中原华和知识产权代理
有限责任公司 11019
代理人 孙磊 寿宁
(51)Int.Cl.
H04W 4/02(2018.01)
H04W 4/024(2018.01)
H04W 64/00(2009.01)
(54)发明名称定位导航数据采集系统及方法(57)摘要本发明涉及一种定位导航数据采集系统及方法,该系统包括:一个或多个机器人,所述机器人用于获取场所的坐标信息,以及遍历所述场所中的多个关键点,其中,所述坐标信息包括所述关键点的坐标值;一个或多个数据采集设备,设置于所述机器人上,用于在所述机器人到达所述关键点后、和/或在所述机器人移动过程中采集定位导航数据;数据存储模块,用于记录所述定位导航数据、和与所述定位导航数据的采集位置对应的所述坐标信息。
利用本发明的定位导航数据采集系统及方法,实现了自动采集数据,能够极大地节省数据采集的时间和成本、提高效率,
并能够大规模推广。
权利要求书4页 说明书17页 附图4页CN 109889982 A 2019.06.14
C N 109889982
A
权 利 要 求 书1/4页CN 109889982 A
1.一种定位导航数据采集系统,其特征在于,所述系统包括:
一个或多个机器人,所述机器人用于获取场所的坐标信息,以及遍历所述场所中的多个关键点,其中,所述坐标信息包括所述关键点的坐标值;
一个或多个数据采集设备,设置于所述机器人上,用于在所述机器人到达所述关键点后、和/或在所述机器人的移动过程中采集定位导航数据;
数据存储模块,用于记录所述定位导航数据、和与所述定位导航数据的采集位置对应的所述坐标信息。
2.根据权利要求1所述的定位导航数据采集系统,其特征在于,所述机器人具体用于:
利用基于视觉惯性里程计的即时定位与地图构建技术对所述场所建图得到所述坐标信息;
利用基于视觉惯性里程计的即时定位与地图构建技术进行自动导航并遍历所述关键点。
3.根据权利要求1所述的定位导航数据采集系统,其特征在于:
所述机器人包括第一建图单元和第一遍历单元;
所述第一建图单元用于通过对设置于所述场所中的关键点标记进行自动寻找和识别,自动地对所述场所建图得到所述关键点的坐标值;其中,所述关键点标记是用于标识出所述关键点的视觉标记、红外标记或电磁标记;
所述第一遍历单元用于根据所述关键点的坐标值,自动导航并遍历所述关键点。
4.根据权利要求1所述的定位导航数据采集系统,其特征在于,所述系统还包括:
远程终端,与所述机器人和所述数据采集设备通信连接,用于展示所述机器人和所述数据采集设备的状态、展示采集到的数据、对所述机器人的运动和所述数据采集设备的数据采集进行远程监控、在出现故障时接管所述机器人和所述数据采集设备的控制、以及遥控所述机器人建图。
5.根据权利要求4所述的定位导航数据采集系统,其特征在于:
所述机器人包括第二建图单元、第二遍历单元的一个或多个;
所述第二建图单元用于根据所述远程终端的控制指令所指定的所述关键点的位置,对所述场所建图得到所述关键点的坐标值;
所述第二遍历单元用于根据所述远程终端的控制指令所指定的所述关键点的位置,在所述场所中移动并遍历所述关键点;
所述数据采集设备具体用于根据所述远程终端的控制指令,在所述机器人到达所述关键点后、和/或在所述机器人移动过程中采集定位导航数据。
6.根据权利要求1到5中任意一项权利要求所述的定位导航数据采集系统,其特征在于:
所述数据采集设备包括无线信号采集单元、运动参数采集单元、视觉数据采集单元的一个或多个;
所述无线信号采集单元用于在所述机器人到达所述关键点后、和/或在所述机器人移动过程中,采集无线信号数据;
所述运动参数采集单元用于在所述机器人到达所述关键点后、和/或在所述机器人移动过程中,采集所述数据采集设备的运动参数;
2。