上海的交通信号控制及SCATS系统
浦东地区scats信号机覆盖要求

浦东地区scats信号机覆盖要求(实用版)目录1.背景介绍:浦东地区的重要性和 scats 信号机的作用2.scats 信号机的覆盖要求3.实施 scats 信号机覆盖的意义4.结论:对浦东地区交通管理的提升正文【背景介绍】浦东地区,作为上海市的重要组成部分,是我国改革开放和现代化建设的缩影。
在这个区域,有着密集的道路交通网络和众多的交通运输工具。
其中,scats 信号机作为交通管理中的重要设备,对于保障道路交通安全和畅通起着至关重要的作用。
scats 信号机,全称为“智能交通信号控制系统”,是一种集交通信号控制、实时监控、数据采集、信息处理等多种功能于一体的智能化交通信号设备。
它能够根据实时交通情况,灵活调整信号灯的时序和时长,以达到最佳的交通控制效果。
【scats 信号机的覆盖要求】在浦东地区,scats 信号机的覆盖要求主要包括以下几个方面:1.覆盖范围:要求覆盖所有主干道、次干道以及重要的支路,确保整个区域的交通状况都能得到实时监控和调控。
2.覆盖密度:要求在一定区域内,scats 信号机的布点数量要充足,以保证能够准确地反映出该区域的交通状况。
3.覆盖质量:要求 scats 信号机的设备质量和技术水平都要达到一定的标准,以保证其正常运行和有效调控。
【实施 scats 信号机覆盖的意义】实施 scats 信号机覆盖,不仅可以提高浦东地区的交通管理水平,还可以带来以下几方面的意义:1.提高交通运行效率:通过对交通信号的实时调控,可以有效地缓解交通拥堵,提高道路的通行能力。
2.保障交通安全:通过对交通信号的科学管理,可以减少交通事故的发生,保障人民群众的生命安全。
3.促进绿色出行:通过优化交通信号控制,可以引导市民选择公共交通、自行车等低碳出行方式,促进绿色出行。
4.提升城市形象:良好的交通秩序和优质的交通服务,可以提升浦东地区乃至整个上海市的城市形象。
【结论】总的来说,实施 scats 信号机覆盖对于提升浦东地区的交通管理水平,保障道路交通安全,促进绿色出行,提升城市形象都具有重要的意义。
SCATS系统架构图
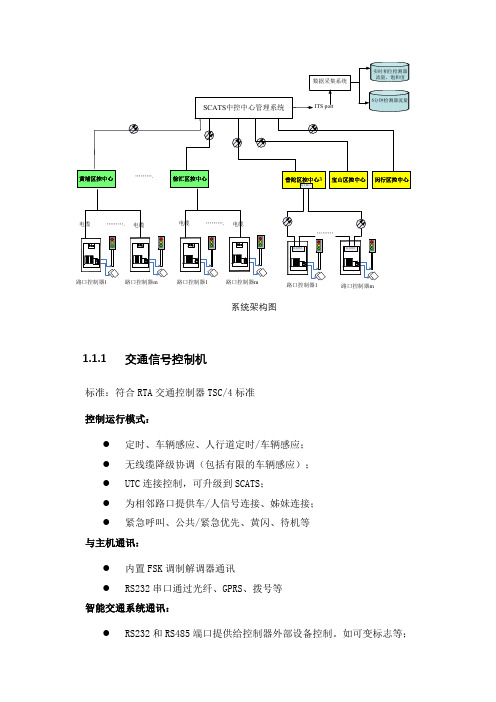
路口控制器1路口控制器m系统架构图1.1.1交通信号控制机标准:符合RTA交通控制器TSC/4标准控制运行模式:●定时、车辆感应、人行道定时/车辆感应;●无线缆降级协调(包括有限的车辆感应);●UTC连接控制,可升级到SCATS;●为相邻路口提供车/人信号连接、姊妹连接;●紧急呼叫、公共/紧急优先、黄闪、待机等与主机通讯:●内置FSK调制解调器通讯●RS232串口通过光纤、GPRS、拨号等智能交通系统通讯:●RS232和RS485端口提供给控制器外部设备控制。
如可变标志等;灯组驱动输出:●最大灯组数:32●所有灯组可编程定义为机动车灯、行人灯或其他需要输出;●定义为行人灯组的黄灯可作为行人等待输出;灯组负载:●每一输出额定功率:5A;●可接灯种类:白炽灯、石英卤素灯、LED灯等;●每一灯组每一颜色(红、黄、绿)均有保险熔丝降级黄闪:●独立的硬件黄闪器,不依靠CPU、软件黄闪,提高安全性;●可选择任何灯组进行红闪;●可在不同的灯组选择不同步的闪灯;信号灯监测:通过监测信号灯电压、功率来监视信号灯的状态检测器输入:●最大检测器输入通道:96●检测器输入包含:车辆感应线圈和干触点接入路口数据配置:●路口基本数据设置存储:两个PCMCIA槽的闪存记忆体或EPROM;●防错功能:路口数据设置必须与控制机箱路口号匹配;设置工具:兼容NGEN,DATGEN和WINTRAFF1.1SCATS应用软件升级方案针对本项目建设的必要性,从业务需求和发展角度,在不影响原有系统正常运行的基础上,实现对原有SCATS系统进行升级。
软件升级工作包括:SCATS应用软件升级成V6.9.2版本;对SCATS应用软件的许可证继续进行授权;对WINDOWS系统进行升级。
1.1.1SCATS系统增加功能1.新版本SCATS系统修正了20余项重大缺陷,主要修正了以下几项重大缺陷:1)V6.9.2版本较V6.5版本解决了 Access(关联数据库管理系统)报告作为“数据库无法访问”的问题;2)中心管理器重新与SCMS数据库连接时,如果重新启动SQL Server时不需要重新启动相关SCATS服务器,此功能同样适用于安装SCATS DR的服务。
交通信号智能控制系统-毕业论文正文
1引言1.1 本课题的意义城市交通控制系统主要是用于城市交通数据监测、交通信号灯控制与交通疏导的计算机综合管理系统,它已经成为现代城市交通监控指挥系统中最重要的组成部分。
因此,如何利用先进的信息技术改造城市交通系统已成为城市交通管理者的共识[1]。
高效的交通灯智能控制系统是解决城市交通问题的关键。
随着经济的快速发展,城市中的车辆逐渐增多,交通拥挤和堵塞现象日趋严重,引起交通事故频发、环境污染加剧等一系列问题。
本设计采用单片机控制,实现交通信号灯的智能控制。
系统根据东西和南北两个方向的车辆情况,自动进行定时控制和智能控制方式的切换,当某一方向没有车辆时,系统会自动切换使另一方向车辆通行。
当两个方向都有车辆时,按照定时控制方式通行。
本设计与普通的交通信号控制系统相比,其优点是可根据路口情况的不同,对交通灯进行差异化控制,从而达到使道路更为通畅的目的,最大限度的缓解交通拥挤情况[2]。
交通信号控制系统是现代城市交通控制和疏导的主要手段。
而作为城市交通基本组成部分的平面交叉路口,其通行能力是解决城市交通问题的关键,而交通信号灯又是交叉路口必不可少的交通控制手段。
随着计算机技术和自动控制技术的发展,以及交通流理论的不断发展完善,交通运输组织与优化理论、技术的不断提高,国内外逐步形成了一批高水平有实效的城市道路交通控制系统[3]。
1.2 国内外发展状况交通信号控制系统是现代城市交通控制和疏导的主要手段。
而作为城市交通基本组成部分的平面交叉路口,其通行能力是解决城市交通问题的关键,而交通信号灯又是交叉路口必不可少的交通控制手段。
随着计算机技术和自动控制技术的发展,以及交通流理论的不断发展完善,交通运输组织与优化理论、技术的不断提高,国内外逐步形成了一批高水平有实效的城市道路交通控制系统[4]。
国外现状1 澳大利亚SCAT系统SCATS采取分层递阶式控制结构。
其控制中心备有一台监控计算机和一台管理计算机,通过串行数据通讯线路相连。
SCATS系统在中国大陆的应用

•
SCATS使用个人计算机(PC)作为区域计算机,每台PC机可 以控制128个路口。当系统超过这个数量时,增加区域计算 机即可。
2013-8-16 17 国家精品课程:交通控制与管理
交通信号控制
区域机的作用
SCATS使用运行Windows 的PC机为区域计算机,用 异步串口接口和调制解调器(使用电话线)或ATM等网络 等为通讯手段,将区域计算机和路口控制器连接在一起。 这使得计算机硬件和操作系统软件的维护工作非常容易进 行。 在线控制
2013-8-16
14
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——中央管理控制级
SCATS中央管理控制级: • • 采用IBM兼容工业型计算机或服务器 要求极低: 最低要求:CPU 350MHZ 内存 256MB 硬盘 20G 每个中央管理级计算机可以管理64个 区域管理控制计算机 中央管理级安装在与系统中任何一个 区域管理控制计算机上
SCATS组成结构——SCATS工作站
SCATS工作站:
• •
采用IBM兼容计算机 要求极低: 最低要求:CPU 1GHZ 内存 256MB 硬盘 20G • 每个SCATS系统连接的管理控制工作站的数量 没有限制,用户200个,同时允许30个工作站对系 统操作
2013-8-16
19
国家精品课程:交通控制与管理
•
•
2013-8-16
15
பைடு நூலகம்
国家精品课程:交通控制与管理
交通信号控制
中央控制器的作用
SCATS是以模块化结构设计的,可以应用于小、中、 大规模的城市。
通常在多个区域计算机组成的系统中,需要一个管理计 算机,负责数据的输入、采集、监测、数据分析、系统 记录与备份等管理性工作,以简化大系统的运营管理。 SCATS可以将网络中的任何一台区域计算机定义为管 理计算机,从而无需单独设置独立的管理计算机。
交通信号控制与SCATS系统

2019/10/23
28
国家精品课程:交通控制与管理
交通信号控制
控制基本原理
SCATS系统
2019/10/23
29
国家精品课程:交通控制与管理
交通信号控制
系统控制的核心理念
通过系统的合理配时“均衡”路网交通流量,达 到对车辆、路网的“平衡”控制,提高整体效率!
在系统控制时综合考虑路网交通,如“绿波”设 置也是有条件的,如考虑到绿波的下游是否有“消 化”能力。
2019/10/23
27
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——通讯
SCATS的通讯
中央管理级、区域管理控制、用户端、与集成平台 等之间的通信是通过TCP/IP协议通讯;
区域控制计算机与路口控制器之间的通讯可以根据 条件通过多种方式实现:
1、FSK调制电话线通讯(沈阳、上海…) 2、点对点光纤RS232通讯(杭州、宁波、广州、合 肥…) 3、TCP/IP网络通讯(重庆、苏州、上海(部分)….) 4、无线(GSM)网络通讯(广州(部分)…) 5、以上多种形式并存
交通信号控制
SCATS组成结构——路口控制器
SCATS路口控制器(ECLIPSE)
• RTA授权认证产品 • 针对路口特征的软件定义 • 多相位控制 • 特殊控制 • 高可靠性 • 高可维护性
2019/10/23
20
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——路口控制器
SCATS 区域控制器
区域交通信号控制—— 上海的SCATS系统
上海市交警总队高工:韩如文老师
2019/10/23
1
国家精品课程:交通控制与管理
基于scats系统信号控制方案的设计与优化

基于scats系统信号控制方案的设计与优化基于scats系统信号控制方案的设计与优化一、引言在城市交通管理中,信号控制是至关重要的一环。
而scats系统作为一种智能交通信号控制系统,能够对交通流量进行实时检测和优化调整,极大地提高了交通效率和路口通行能力。
本文将从设计与优化的角度出发,深入探讨基于scats系统的信号控制方案。
二、scats系统简介scats系统(Sydney Coordinated Adaptive Traffic System)是一种由澳大利亚悉尼大学研发的智能交通信号控制系统。
它利用传感器、相机和计算机技术,对路口交通流量实时进行监测和分析,根据实际情况自适应地调整信号灯的时长,从而实现交叉口的智能化控制。
三、scats系统信号控制方案的设计1. 传感器的布置和选择在设计scats系统的信号控制方案时,首先需要考虑传感器的布置和选择。
不同类型的传感器,比如车辆检测器、压感线圈等,能够提供不同的交通数据,因此合理选择和布置传感器对于系统的性能至关重要。
2. 数据的采集与分析scats系统通过收集传感器获取的交通数据,进行实时的数据分析和处理。
这一过程需要高效的算法和数据处理能力,以确保系统能够快速、准确地获取交通状况,并进行信号控制决策。
3. 信号灯的自适应调整根据实际交通情况,scats系统能够自主地调整信号灯的时长,以适应不同时间段和交通流量的变化。
这就要求系统能够准确地预测交通流量并作出合理的控制决策,以实现交叉口信号的自适应调整。
四、scats系统信号控制方案的优化1. 交通流量预测算法的优化为了使scats系统能够更好地进行信号控制,需要对交通流量预测算法进行优化。
通过引入机器学习、深度学习等技术,提高算法的准确度和智能化水平,从而提升系统的信号控制效果。
2. 多模式联合控制策略由于城市交通具有复杂性和多样性,scats系统的信号控制方案需要考虑到不同路口、不同时间段和不同交通流量情况下的适应性。
交通信号控制与SCATS系统

车辆信号灯组 车辆检测器
逻辑模块
检测 输入口
特征数据
8-32个输出
行人按钮 路口控制器
行人信号灯组
2016/11/29
21
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
主要特点: • RTA最新TSC4认证的SCATS控制 器 • 最大设计:32灯组输出+48通道检 测器输入+48路干触点输入 • 冲突监视 • 特殊用途输入、输出:12路 • 通讯:FSK、RS232 控制模式: – 手动、定时、感应控制; – 降级无线缆协调; – 黄闪; – 紧急呼叫优先; – 公交优先
•
SCATS使用个人计算机(PC)作为区域计算机,每台PC机可 以控制128个路口。当系统超过这个数量时,增加区域计算 机即可。
2016/11/29 17 国家精品课程:交通控制与管理
交通信号控制
区域机的作用
SCATS使用运行Windows 的PC机为区域计算机,用 异步串口接口和调制解调器(使用电话线)或ATM等网络 等为通讯手段,将区域计算机和路口控制器连接在一起。 这使得计算机硬件和操作系统软件的维护工作非常容易进 行。 在线控制
国家精品课程:交通控制与管理
•
控制模块机箱
– – – –
2016/11/29
23
交通信号控制
SCATS组成结构——信号机Eclipse
2016/11/29
24
国精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
2016/11/29
25
国家精品课程:交通控制与管理
交通信号控制
交通控制SCOOT系统与SCATS系统的比较讲解学习
系统研发和维 护
SCATS系统在国内没有研发 团队和维护队伍,无法对用户 的定制化需求及维护要求作出 及时响应
SCOOT系统在国内有专门的研 发力量和维护团队,可以及时 响应用户的定制化需求及维护 要求
系统实施效果
从控制效果来看,SCATS对 旅行时间改善效果有限,对停 车次数的减少大概是9%左右
SCOOT数据经过处理可以得到 超过十种交通数据
系统人机界面
采用较为传统的操作界面,大 多数为英文界面,且未采用标 准GIS矢量地图,人机友好性 有待提高
已针对国内应用专门开发,全 部采用中文界面,基于标准的GIS矢量地图,人机交互友 好,操作方便,易于维护
工程维护
系统结构不开放,需要事先为 每个路口定义控制方案,而且 需要定期更新,系统维护成本 较高
SCOOT每个阶段均做优化,而 且可以精确到秒级
比较项
SCATS系统
SCOOT系统
选择一次;
相位差优化
关于相位差的优化,SCATS系统同样是从事先确定的数值 中选择
SCOOT系统通过模型计算每个 路口针对各个方于米用事先定义好的若干方 案,系统对于突发性的交通流 缺之应对措施
交 通 控 制SCOOT系 统
与SCATS系 统的比较
交通控制系统模型
比较项
SCATS系统
SCOOT系统
控制模型
SCATS检测器安装在停车线 上,不建立交通模型,因些其 控制方案不是基于交通模型 的。正因为如此,其关于配时 的优化未使用交通模型,本质 上是一种实时方案选择系统, 因而限制了配时方案的优化过 程,灵活度不够;
反之由于SCOOT模型是实时 计算,系统内并没有事先定义 的方案,因而针对突发性的交 通情况同样能够应对
上海轨道交通ATC系统概述
1.ATC系统概述ATC系统是基于用于列车检测和传送机车信号的无绝缘音频数字轨道电路US&S AF -904产品上的,这种轨旁电路用来进行列车检测和机车信号的传送。
使用US&S MICROLOK II产品以安全微处理器和非安全NVLE来实现安全和非安全的轨旁逻辑,使用US&S MicroCab车辆组件来实现车载列车自动控制。
ATC系统由3个基本系统构成:·ATP—列车自动防护;·ATO—列车自动运行;·ATS—列车自动监控。
ATC系统的设备,按地点可划分为三类:·轨旁—现场设备、信号设备室、信号控制室;·车载—装在车辆上的设备和单元;·中央—位于中央控制室和ATS设备室的ATS设备。
西延伸段ATC系统保留既有2号线ATC系统性能指标,不再进行功能的增减。
下面章节提供在三类基本设备地点处的ATP,ATO和ATS的详细说明。
1.1轨旁ATC本章节说明地铁2号线西延伸段的轨旁信号系统。
同时还说明US&S设备及其安装。
1.1.1正线概况在轨旁指定集中站的信号设备室内,安装轨旁信号系统的控制设备。
由CRCC提供的固定式轨旁色灯信号机被安装在所有列车渡线和道岔(联锁区)范围内,信号机安装在列车运行方向的线路右侧,在SER中的点灯电源是220V交流电流,并且灯丝转换继电器安装在本身的信号机机构内。
点灯电路符合铁道部(MOR)标准。
通过正线ATC系统的列车检测电路,正线上所有列车的位置都被自动地监督。
列车被显示在位于信号设备室(SER)的NVLE监视器上和车站控制室(SCR)的监视器上。
通过数据传输系统(DTS),这类信息还送到控制中心并显示在计算机控制台上。
通过这类显示,控制中心调度员可以监视正线上所有列车的运行以及辅助设备、配电设备的状态。
1.1.1.1联锁区集中站西延伸段有2个联锁集中站,它们是威宁路站和虹桥临空园区站。
SCATAS系统信号机

SCATS 城市交通管理系统概述目录SCATS 概述 (4)新一代的SCATS系统 (4)自适应控制不断变化的交通 (4)无需更新配时方案 (5)SCATS提供实时响应 (5)四种控制模式 (6)两个层次的控制战略 (6)战略控制 (6)子系统 (7)子系统的自动连接 (7)饱和度 (7)周期的有效性 (8)绿信比的作用 (8)相位差 (9)交通流协调监测与调整 (9)战术控制 (10)战略与战术的结合 (11)操作员控制 (11)时间表控制 (11)特殊例程 (11)系统容量 (11)自动降级运行 (11)降级运行时的协调 (12)系统硬件-计算机系统平台 (12)分布式、分层次控制系统 (12)区域计算机 (14)用户界面 (14)监视及控制功能 (14)图形用户界面 (15)图形数据显示 (16)在线控制 (16)报警条件 (16)系统硬件:路口控制器 (17)控制器的四种运行模式 (17)黄闪 (18)相位顺序 (18)检测 (18)通讯 (20)智能交通 (ITS) 接口 (20)系统运行窗口图例 (21)附录1:SCATS系统在全球的安装 (29)附录2:泰科公司简介 (30)SCATS 概述SCATS是一个计算机交通管理系统,它包括硬件、软件和独有的控制理念。
系统采用实时运行模式,根据交通流量的变化调整信号配时,使系统运行在最佳状态。
SCATS系统的目的,是控制和协调区域范围的交通,而不是只注重单个路口的运行。
新一代的SCATS系统自问世以来,SCATS应用最新的科技发展,不断地改进和加强其功能。
最新的SCATS6版本,更是体现了以用户的需求为导向的开发宗旨,为交通管理者的使用和决策提供更多和更灵活的手段。
更重要的是,新技术的使用,使系统造价不断地降低。
新的SCATS系统应用在PC基础上,增加了一台主机能够控制的路口数量。
在改进管理和监测功能的同时,还改进了数据采集和报表能力。
SCATS6可以根据用户的需要和财政预算,提供以下三种不同的配置:l完全交通自适应控制l固定配时控制l拨入式控制SCATS是一个具有广泛适应性的系统,世界各地的工程师根据道路应用环境的不同,对其做不同的配置,以满足本地的需求。
区域信号协调控制

PI值上升
PI值下降
向“-”方向 试调成功
三、SCATS控制系统
SCATS系统属于响应式联机操作系统, 70年代开始研究,80年代投入使用。该 系统把信号周期、绿信比和相位差作为 各自独立的参数分别进行优选,优选过 程所使用的“算法”以饱和度和综合流 量为主要依据。它的优化过程并没有利 用数学模型,而是再各种预定的方案钟 进行优选,方法简单但配时方案的数量 是有限的。
一、 概述
(二)分类(4)
3.按控制结构分 (1)集中式控制:多个区域由一个中心控制 优点:研制与维护方便; 所需设备较少,维修方便。 缺点:通信复杂,存储数量大。 考虑因素: 需要监视和控制的实时单元的数量; 分配数据和指令所需通信线路的费用; 可选用的控制方法和执行能力的灵活性。
一、 概述
一、 概述
(二)分类(3)
2.按控制方式分 (1)方案选择式(SCATS) 通常要根据不同的交通流,事先求解出各 种配时方案,存储在中心计算机内,系统运行 时按实时采集的交通量数据,选取最适用的配 时方案,实施交通控制。 (2)方案生成式(SCOOT) 根据实时采集的交通量数据,在线算出最 优控制参数从而形成配时方案。
二、固定式脱机控制系统
TRANSYT是一种用于定周期信号控制系 统的设计方法。在该系统中,信号周期 是共用的,而且在一个确定的配时方案 执行阶段内,每个交叉口上的各个信号 阶段起迄时间点(相对于一个周期长度 的比例)是固定不变的。为了适应交通 量随时间而变化的客观情况,就要拟定 适合于不同交通状况的配时方案,以供 不同时段使用。对于已有控制方案的路 口,TRANSYT利用自身的交通模型对已有 方案进行优化。
(二)分类(5)
3.按控制结构分 (2)分层式控制 第一层:(微观层)交叉口层,一般由信号机 控制 功能包括:监视设备故障;收集检测数据 (时间占有率、流量、速度等);上传分控 中心;接受下达的指令并执行(或人工干 预)。 第二层:(中观层)分控中心 功能包括:接受信号机上传数据并上报中控 中心;形成方案并下达信号机执行。
上海的交通信号控制与scats系统20101208
交通信号控制
SCATS组成结构——路口控制器
SCATS路口控制器(ECLIPSE)
• RTA授权认证产品 • 针对路口特征的软件定义 • 多相位控制 • 特殊控制 • 高可靠性 • 高可维护性
2024/1/3
18
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——路口控制器
SCATS 区域控制器
SCATS 中央管理
PC
其它 ITS 设备
解调器 & RAS connection
2024/1/3
LAN or WAN 遥远终端
11
SCATS 操作台 (PC’s) 国家精品课程:交通控制与管理
交通信号控制
SCATS系统结构纲要
▪ SCATS中央管理控制级 ▪ SCATS区域管理控制级 ▪ SCATS系统工作站 ▪ SCATS系统的路口控制器-Eclipse ▪ SCATS系统的通讯
✓每个城市应用后,系统都得到快速的扩展。
2024/1/3
9
国家精品课程:交通控制与管理
交通信号控制
结构
SCATS系统
2024/1/3
10
国家精品课程:交通控制与管理
交通信号控制
SCATS系统结构示意图
PSC
Video Wall
PSC
SCATS
PC 区域 1
SCATS
PC 区域 2
SCATS
PC 区域 3
SCATS系统基本原理
高效的“集装箱运输”原理: 1、交通信号最佳工作条件是把交通车流分配为一个个车队(集装箱式)
的通行
2、“红灯”可以起到“整理车流”的作用 3、“车间距”控制原理,与车型无关 4、协调功能
SCATS系统简介

泰科公司
15
SCATS 交通信号控制系统
如果区域计算机出现故障或通讯中断,本地控制器则实施以时间为基础的协调运行,该模式 称为离线模式。在该模式中,相邻的路口信号依时钟协调运行,控制方案按时段选择。同时,本地 车感控制功能参与运行。时钟是由电源频率或晶振实现的。
3 SCATS 结构及通讯......................................................................................... 18
3.1 分布式、分层次控制系统 ..............................................................................................................18 3.2 系统容量 ...................................................................................................................................19 3.3 SCATS 的通讯...........................................................................................................................19
6.1 路口机机箱结构 ........................................................................................................................28 6.2 电气指标 ...................................................................................................................................28 6.3 环境指标: ...............................................................................................................................28 6.4 微处理器 ...................................................................................................................................29 6.5 功能控制模块化 ........................................................................................................................29 6.6 现场控制、编程 ........................................................................................................................29 6.7 极高的可靠性............................................................................................................................29 6.8 PD200 系列车辆检测器 ............................................................................................................29
浦东地区scats信号机覆盖要求

浦东地区scats信号机覆盖要求浦东地区scats信号机的覆盖要求浦东地区作为上海市重要的城市经济发展区域,交通拥堵问题日益凸显。
为了提高交通流动性和安全性,浦东地区依托智能交通系统(ITS),实施了信号控制自适应交通系统(SCATS)。
SCATS系统通过智能化的信号控制算法,能够根据实时交通流量和需求,对信号灯进行智能优化控制,从而降低交通拥堵,提高车辆通过效率。
在SCATS系统中,信号机的覆盖范围至关重要。
良好的信号机覆盖可以保证系统的运行效果和可靠性,并且对于提供准确的交通数据也十分关键。
为了确保浦东地区SCATS信号机的覆盖要求,以下几点需要考虑:1.信号机的布设密度:根据道路特点和交通流量情况,合理确定信号机的布设密度是确保覆盖效果的关键。
密度过低将导致信号控制的不精准,密度过高则可能造成资源浪费。
因此,在浦东地区SCATS 信号机的布设过程中,应进行详细的道路交通流量调查和分析,以确定最合适的信号机布设密度。
2.信号机位置的选择:在确定信号机布设密度后,需要综合考虑道路交通情况、交叉口布局和交通参与者的通行需要来选择信号机的具体位置。
信号机应尽量布设在交通流量密集的路口或道路段上,以确保其覆盖范围的全面性和有效性。
3.信号机的通讯连接:信号机与SCATS系统的通讯连接也是覆盖要求的重要方面。
信号机需要能够实时传输交通数据给SCATS系统,并接收指令进行相应的信号控制。
因此,信号机的通讯设备和网络连接的稳定性和可靠性至关重要。
同时,还需要对信号机进行远程监控和管理,以保证其正常运行。
4.监测和评估信号机性能:为了确保信号机的覆盖效果和工作性能,需要建立科学的监测和评估体系。
可以通过实时监测信号机的工作状态、交通数据和信号控制方案的执行情况来评估其性能,并及时调整和优化信号机的布设和控制策略。
综上所述,浦东地区SCATS信号机的覆盖要求是一个综合而复杂的问题。
只有充分考虑交通流量、道路特点、通讯连接和性能监测等方面的因素,并采取科学合理的布设和管理措施,才能确保信号机覆盖的生动、全面和具有指导意义的效果,从而实现交通流动性和安全性的提升。
澳大利亚智能交通 SCATS和Vic Roads
澳大利亚智能交通 SCATS和Vic Roads澳大利亚是世界上较早从事智能交通控制技术研究的国家之一,著名的最优自动适应交通控制系统(SCATS)在澳大利亚几乎所有的城市都有使用,目前上海、深圳等城市也采用这一系统。
澳大利亚的智能交通建设包括先进的交通控制系统(SCATS)、远程信号控制系统(Vic Roads)和微机交通控制系统(BLISS)。
交通控制系统(SCATS)的优点是其自动适应交通条件变化的能力,通过大量设在路上的传感器以及视频摄像机随时获取道路车流信息。
ANTTS是其重要子系统,该系统通过几千辆出租车装有的ANTT S电子标签与设在约200个交叉路口处的询问器通话,通过对出租车的识别,SCATS系统能够计算旅行时间并对交通网的运行情况进行判断。
澳大利亚的先进系统合作研究中心目前正在开发一种名叫TRIR AM的系统,其主要的目的是通过模拟道路网来预测交通行为以及新的交通流量。
远程信号控制系统(Vic Roads)。
交通控制与通信中心(TCCC),不仅使用SCATS系统进行交通信号灯控制,而且还采用其它系统进行事故检测和信息的收集发布工作。
其中较重要的是交通拨号系统,该系统通过普通的电话线,TCCC能够连接到50个偏远的受控交通灯,可以监测这些信号灯的状态改变它们的参数,为偏远路口的信号控制提供了便利。
微机交通控制系统(BLISS)的最主要的优点是运行于普通微机上,并可控制63个交通灯,目前在布里斯班已超过500个信号灯采用BLISS系统进行控制。
除以上三大系统外,道路信号系统、车辆监控系统和公共信息服务系统对智能交通建设也起到重要作用。
道路信号系统道路信号系统是交通控制中心与机动车通信的基础。
通过该系统可实现交通管理中心运行车辆间的信息交流,该系统使用900MHz 的频率通过路旁询问器与车内电子标签进行通信,电子标签通常是简单的异频雷达收发机,当被询问时可返回一个可被识别的信号。
该系统最普通的应用是车辆的不停车收费。
交通信号控制系统——SCATS的结构

SCATS Adaptive Traffic SystemTRB Committee A3A18Adaptive Traffic Control WorkshopJuly 1998Note : Additional comments available on “Notes” page.For further information contact:Neil.R.Gross@Company: SCATS - Objectives and Installations •Minimize Stops( light traffic), delay (heavy traffic) and travel time.•SCATS is installed in many cities worldwide,•There are approximately 5000 intersection under SCATS control around the world,•Largest systems are: Sydney (2000 intersections), Melbourne (2000), Hong Kong (600) and, in the US, Oakland County MI (350).2SCATS System Architecture •Local Traffic Controllers - tactical control (calling, extension) and data collection,•Regional Computers - Strategic control,•Management Computer - Communications and Database functions.•Simplest configuration - single Regional Computer.•Operator Interface - Windows 95 or -NT Graphical user interface with point and click access to all parameters.89SCATS GUI ExampleSCATS Data Requirements •Loop Detectors or equivalent (video detection inOakland County MI) in each lane at the stop line.•Detectors used for calling and extension.•Controller collects number of spaces and total space time during green of each phase, each cycle for use by SCATS adaptive algorithm.•Actual movement data collected by stop line detectors allows accurate split determination.1011SCATS Data Requirements•Degree of Saturation (DS)and Car Equivalent Flow (VK) for each Approach lane .•DS used to vote for Cycle Length and Split Plan.•VK used to vote for OffsetPlanSCATS Data Requirements•An upstream approach can vote at downstream intersection (Engineer selectable). “Early” influence.•Tactical operation of controller can be enhanced by special detector logic in the controller personality.•Special functions include:–queue length detectors–detector combinations–turn/through discrimination for shared lanes, etc.12SCATS Data Requirements•No modeling required.•User defines:–subsystems–target cycle lengths and relationship to DS,–split plan strategy–linkages and offsets13SCATS Hardware Requirements •Management Computer - DEC VAX/ALPHA, OpenVMS•Regional Computer - Personal Computer (200 Mhz) with Windows NT and Digi serial communications interface modules,•Local Processor - Traffic Controller with SCATS functionality, available for NEMA and 170.16SCATS Traffic Controllers•AWA Delta 170 upgrades existing 170 controller to support SCATS.•Relay Module added for sense/control of cabinet status.•AWA Delta 3N controller replaces existing NEMA controller.•Connections are via existing A, B and C connectors.•One back-panel link required.170NEMA17SCATS Control Variables •Tactical Control–presence (locked or non-locked) for phase call–non-occupancy for gapping and wasting (accumulated waste green) for phase termination.•Strategic Control–Number of spaces and total space time–Used to develop “Degree of Saturation” DS and Car“Equivalent Flow” VK18SCATS Degree of SaturationDS = [green-(unused green)]/available green •Green is phase time during data collection •Unused green is space time greater than or less than the saturation space time. i.e.–Total space time from controller, LESS–Number of spaces times the standard space time atmaximum flow•Unused green is a measure of efficiency (zero at saturation flow, +ve undersat, -ve oversat).19SCATS Degree of SaturationDS = [green-(unused green)]/available green •Standard space time at maximum flow is self calibrated daily•DS is the ratio of efficiently used phase time to available phase time,•DS can be >100% i.e. during oversaturation the used green can be negative - vehicles are closer than standard space time at maximum flow.20SCATS Car Equivalent Flow - VK •Derived from DS and the lane saturation flow for each lane,•Independent of vehicle types in traffic stream,•Allows valid comparisons of competing flows for offset selection.•VK= DS x green time x vehicles per second at maximum flow21SCATS Data Smoothing and Damping •DS and VK are used as weighted averages usually over three cycles,•SCATS uses smoothing, damping (i.e.reducing the gain of feedback control loops) and hysteresis extensively,•It is the calibration of these techniques over years of experience that is the key to effective performance.22SCATS DS Usage - Cycle Length •User defined equilibrium DS values used to determine relationship between measured DS and CL.•Objective to keep CL below user defined targets.•RL (target CL) determined for measured DS.•Compared with last CL•Difference and direction of change ⇒ RL’24SCATS DS Usage - Cycle Length •Weighted average of RL’(last three cycles) determines final RL•CL can move toward final RL by +/- 6 seconds.•CL can change by up to 9 seconds where RL for the last two cycles was > 6 seconds. (allows response to steep change in demand)•Subsystems at LCL(low CL) move to SCL (“Stopper”CL) based on flow per cycle parameters, not DS. (i.e. step change).25SCATS DS Usage - Split Plan •Possible split plans examined each cycle to determine the most “equisat” plan for the next cycle, i.e.minimal delay•Equisat: DS on critical approaches equal,.• Maximum projected DS for each possible plan calculated (using last cycle DS values). Plan with the lowest maximum selected.•Projected DS = DS (old split/new split)26SCATS DS Usage - Split Plan •For Incremental Split Selection: selection is from 7 possible “plans” for 2 phase (stage) intersection or 37 possible “plans” for 3 and 4 phase (stage) intersections (sample shown below)Plan2122232425Phase 1-422-40Phase 22022-4Phase 30-4022Phase 422-402(figures are percent change, i.e. plan 21 = 4 % off phase 1,2 % added to plans 2 and 4.)27SCATS Offset Selection •Offset plans are selected by comparing traffic flows on the links,•Directional Bias values (DB’s) are entered for each of four plans for each link•Weighted three-cycle average volumes (VK) are multiplied by the DB’s and the results summed for each plan,•The plan with the highest sum receives the vote.28SCATS Offset Selection•A new offset plan is adopted when 4 of the last 5 votes are for the same plan.•Two offset values, a and b, are entered for each offset plan, and a CL range, CL1 and CL2, is entered for each plan,•The offset adopted is a at CL1, b at CL2 and a linear interpolation for CL between CL1 and CL2 (can be disabled if “jump”desired)..29SCATS Coordination •Intersections are grouped in Sub-systems,•A sub-system comprises one or more intersections only one of which is “critical”i.e. requires dynamic split selection,•All cycle length and split plan voting is carried out at the critical intersection,•CL and Splits at “minor” intersections in the sub-system are controlled by the critical intersection.30SCATS Coordination•All intersections in a sub-system operate at the same CL and are coordinated via offsets.•Sub-systems can “marry” to achieve coordination using a separate set of offsets,•“Married” sub-systems have the same CL,•“Marriage”and “Divorce” is controlled through voting based on CL and volume and occurs automatically.31SCATS Phasing Flexibility •Compatible phases (signal groups or displays) grouped into STAGES (e.g. main street through may be 2 and 6. These are grouped into Stage A).•Signal Group control within stages for conditional overlaps, green arrow vs ped. control etc. allowed.•SCATS has seven Stages, A to G,•Stages can be introduced in any order,•Any undemanded stage can be skipped,32SCATS Phasing Flexibility•In Isolated and Flexilink (fallback) modes the sequence is defined in controller “personality”. Several options are provided.•In Masterlink mode the sequence is determined by data in the Regional Computer.–Split plan features used to control gapping, stageselection and assignment of unused stage time (e.g. no gap, no gap for % of stage, time gain etc.).33SCATS Arterial/Network Capability •Normally arterial, i.e one coordination route,•Offset plans automatically arranged for low CL, Direction 1, “Business Peak” and Direction 2 use,•For a network the offset plans can be independent for use on multiple coordination routes. (SelectN1 subsystem key option).•Split plan features can be used to ensure stages run full length to ensure coordination.34SCATS Arterial/Network Capability •Offsets between subsystems are defined in the form LPn=ttppnn i.e. reference offset in this subsystem is offset by tt seconds from the end of Stage pp at intersection nn,•nn can be different on each of the four offset plans,•thus coordination decisions are not constrained by simple inbound vs outbound arguments.35SCATS Arterial/Network Capability •When SCATS is employed on a grid network,offsets are selected as dictated for the heavily trafficked routes through the network,•At all times, as many links as possible will be operating with defined offsets and these will be the links with the greatest flow,•The remaining links, for which offsets cannot be defined because it would close loops, are those with the lowest traffic flow.36SCATS Measures of Effectiveness •MOEs available from system include (per lane):–SCATS Degree of Saturation DS–VO/VK (actual/calculated vehicles during green)•MOEs should be measured independently:–SCATS in Sydney is equipped with ANTTS (Automatic Network Travel Time Subsystem-link travel times from 4000taxicabs collected and analyzed continuously).–Unusual Congestion Monitor37SCATS Priority Systems - Controller •Five priority inputs provided, one railroad and four vehicle,•Vehicle priority inputs accept steady or pulsed signal for different preemption display,•Preemption display (signal groups), ending overlaps and return stage can be selected,•Preemption is a function of the controller, SCATS knows preemption is active.38SCATS Priority Systems - System •SCATS Route Preemption Control (RPC) System provides automatic emergency route control from a single input (e.g. fire station pushbutton),•Route is defined as list of intersections with stage(s) to be held (dwelled), delay from previous I/S and dwell time.•Monitor is provided for up to 10 intersections.39SCATS and Oversaturation •SCATS DS can be >100% i.e. oversaturated,•“Stretch effect” i.e. all stages share extra CL up to XCL after which only the stretch (usually coordination) stage gets the benefit (i.e. a move away from equisat),•SCATS allows the traffic engineer to decide which route should be favored, by how much and where the queue can be tolerated.40SCATS Controls•SCATS provides many facilities for the traffic engineer to achieve “custom” control in special circumstances while still maintaining adaptive operation,•Variation routines at intersections allow special operation based on detection of a parameter value (CL, volumes, stage or phase active, next stage to run etc.) including calling of an operator keystroke “macro”.42SCATS Management System•Inventory System•Extended Alarm Monitor and log•Extended System Event log•Extended System Monitor/Volume Monitor •Unusual Congestion (Incident) Monitor •Flow Database System (Count Station Data)43SCATS Management System •Flexigen System (auto generation of time based fallback plans from SCATS data)•Maintenance Management System•Vehicle Location System•Bus Passenger Information System•“Tidal Flow”Intersection Control System •VMS Control44End Thank You。
SCATS调控质量评估系统的设计和实现

悉尼协调自适应交通控制系统(Sydney Coordinated Adaptive Traffic System,简称SCATS),由澳大利亚新南威尔士州道路交通局(RTA)研究开发,是目前世界上少有的几个先进的城市交通信号控制系统之一。
国内已经应用SCATS 系统的城市有上海、沈阳、苏州、广州、石家庄、杭州等十几个城市,SCATS 在这些城市智能交通信号控制方面,发SCATS 调控质量评估系统的设计和实现徐 勇 广州市高科通信技术股份有限公司 广州 510663挥了巨大的作用。
最理想的情况下,SCATS 系统会自动调节各个路口信号机的运行参数,比如周期、相位、绿信比等,以达到各路口最佳的配时方案。
但由于交通具有偶然性,难免在个别时段交通流量出现大的变化或突发事故,这时全部依赖于SCATS 系统的自适应能力已经不够,必须进行人工干预。
目前各城市交警支队及下辖部门经常进行人工干预,实时调节交通信息,比如锁定长周期、长相位等。
但人工干预又会反过来影响系统的自适应能力和SCATS 系统的运行效率,比如不合理的参数调节,可能导致交通拥堵等情况。
所以人工干预的质量变得很重要,但SCATS 系统本身并不提供足够的手段分析和统计人工调控的效果,也没有量化的方法评估各调控部门以及人员的水平,导致人工调控的质量无法提高。
本项目基于SCATS 系统接口,实现了一套获取和评估SCATS 系统调控质量的软件系统。
1网络结构和SCATS 接口SCATS 系统本身包括SCATS 中央控制机和区域控制机,区域控制机用于控制各个路口的信号机,并将路口数据发送至SCATS 中央控制机,各SCATS 系统调控人员可以通过SCATS 系统的客户端,实时或计划调节各路口信号参数。
SCATS 系统中央控制机支持专用的数据接口,允许第三方程序交互数据,调控质量评估系统就通过这个接口从SCATS 系统获取数据。
SCATS 系统和调控质量评估系统的网络结构如图1所示。
上海的交通信号控制与scats系统

智能化
能够根据实时交通流数据进行自动调整信号 灯配时,实现智能化控制。
灵活性
能够适应不同交通场景和路况,灵活调整信 号灯配时方案。
高效性
能够显著提高道路通行效率,缓解交通拥堵 问题。
SCATS系统在上海的应用情况
应用范围
SCATS系统在上海得到了广泛应用,包括市中心区、郊区和高速公路等区域。
实施效果
上海的交通信号控 制与SCATS系统
目录
• 引言 • 交通信号控制系统 • SCATS系统介绍 • SCATS系统与交通信号控制系统的比
较 • 上海交通信号控制与SCATS系统的未来发展01来自CATALOGUE引言
主题介绍
上海作为中国最大的城市之一,其交 通状况一直备受关注。交通信号控制 是缓解城市交通拥堵、提高道路通行 效率的重要手段之一。
SCATS系统能够实现自动化控制和智能调度,提高交通效率;传统交通信号控制系统智能化程度较低, 主要依靠人工调度和管理。
SCATS系统相对于其他系统的优势
高度自动化
SCATS系统采用计算机技术实现高度 自动化控制,减少了人工干预和误差 。
智能调度
SCATS系统能够根据实时交通情况智 能调整信号灯的配时,提高道路通行 效率。
04
CATALOGUE
SCATS系统与交通信号控制系统的比较
两者之间的相似之处
目的相同
都是为了提高道路交通的效率和安全性,减少交通拥 堵和事故。
信号灯控制
两者都通过信号灯来控制交通流量,包括红绿灯、黄 灯和绿灯。
实时监控
两者都具备实时监控交通流量的能力,能够根据实时 交通情况调整信号灯的配时。
两者之间的差异
THANKS
SCATS数据采集系统的设计与实现
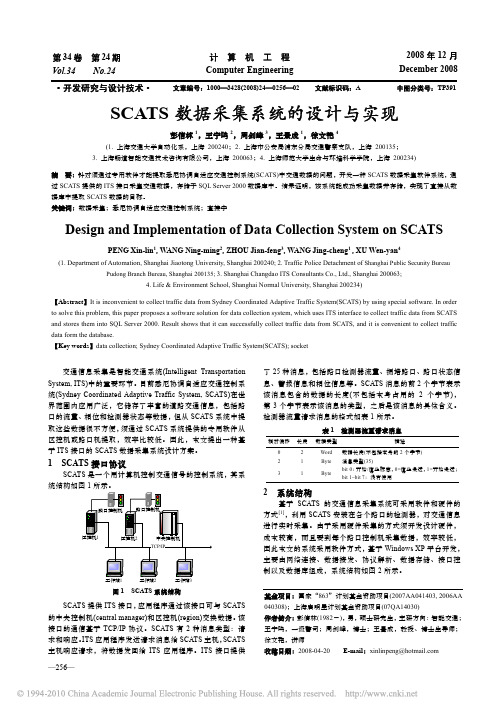
FINT_FLOW 0 2 2 62
4 系统实现的关键技术
为确保该方案能准确、高效地完成任务,本系统的实现 采用了如下关键技术。 4.1 并行程序设计模型
由于交通数据的大数据量以及处理数据的实时性要求, 因此应用程序采用并行程序设计模型。并行程序设计将应用 程序划分成多个独立的任务,并确定这些任务之间的相互依 赖关系。分解问题的方式主要有 3 种:任务分解,数据分解 和数据流分解[2]。任务分解的依据是不同的程序行为采用不 同的线程实现,常用于 GUI(用户界面)应用程序;数据分解 是多个线程对不同的数据执行相同的操作,常用于音频、图 像处理;数据流分解是一个线程的输出作为另一个线程的输 入,适用于处理生产者/消费者问题。
【Abstract】It is inconvenient to collect traffic data from Sydney Coordinated Adaptive Traffic System(SCATS) by using special software. In order to solve this problem, this paper proposes a software solution for data collection system, which uses ITS interface to collect traffic data from SCATS and stores them into SQL Server 2000. Result shows that it can successfully collect traffic data from SCATS, and it is convenient to collect traffic data form the database. 【Key words】data collection; Sydney Coordinated Adaptive Traffic System(SCATS); socket
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/9/18
10
国家精品课程:交通控制与管理
交通信号控制
结构
SCATS系统
2020/9/18
11
国家精品课程:交通控制与管理
交通信号控制
SCATS系统结构示意图
PSC
Video Wall
PSC
SCATS
PC 区域 1
SCATS 区PC域
2
SCATS
饱和流量时的协调控制更偏重疏导路口排队堵塞 等。
2020/9/18
30
国家精品课程:交通控制与管理
交通信号控制
系统主要控制原理
利用收集的交通情况实时全自动地优化以下交通控制参数
周期
Cycle Length
C 30%
A 45%
B
25%
C 30%
A 45%
B
25%
灵活子系统连锁 LINKS
Dynamic Marriage
交通信号控制
SCATS组成结构——SCATS工作站
SCATS工作站:
• 采用IBM兼容计算机 • 要求极低:
最低要求:CPU 1GHZ 内存 256MB 硬盘 20G
• 每个SCATS系统连接的管理控制工作站的数量 没有限制,用户200个,同时允许30个工作站对系 统操作
2020/9/18
19
国家精品课程:交通控制与管理
2
国家精品课程:交通控制与管理
交通信号控制
简介
SCATS系统
2020/9/18
3
国家精品课程:交通控制与管理
交通信号控制
SCATS系统的历史背景
▪ 澳大利亚新南威尔士州公路局(RTA)开发; ▪ 早在30年代初期, 进行了交通控制的研发; ▪ 1969年,首次将计算机应用于交通控制系统 ; ▪ 1973年,应用于在澳大利亚主要城市; ▪ 通过30多年的不断实践、完善发展形成目前世界
2020/9/18
28
国家精品课程:交通控制与管理
交通信号控制
控制基本原理
SCATS系统
2020/9/18
29
国家精品课程:交通控制与管理
交通信号控制
系统控制的核心理念
通过系统的合理配时“均衡”路网交通流量,达 到对车辆、路网的“平衡”控制,提高整体效率!
在系统控制时综合考虑路网交通,如“绿波”设 置也是有条件的,如考虑到绿波的下游是否有“消 化”能力。
其他业绩:
▪ 天津: 80+个路口; ▪ 余姚:50+个路口; ▪ 合肥: 40+个路口; ▪ 宜昌:60 +个路口; ▪ 温州:20+个路口; ▪ 重庆:30+个路口;
2020/9/18
9
国家精品课程:交通控制与管理
交通信号控制
SCATS在中国的应用
综上:
✓SCATS在中国拥有16个城市,控制超过 6500个路口,这是在国内应用的其他系统 不可比拟的。
– 取得辉煌成绩, 增强美国对智能运输系统的兴趣, 确保ITS技术继续开发与应用。
2020/9/18
8
国家精品课程:交通控制与管理
交通信号控制
SCATS在中国的应用
超过100个路口的城市:
▪ 上海(包括浦东): 15个区域控制中心,超过2000个路口; ▪ 香港:控制超过1400个路口;(香港岛300个路口取代SCOOTS); ▪ 沈阳:5个区域控制中心,超过600个路口,ITS接口; ▪ 苏州:控制150个路口,视频检测器应用、ATM通讯传输 ▪ 广州: 8个区域控制中心,控制1000个路口; ▪ 石家庄:控制300+个路口,视频检测器应用、 ITS接口 ▪ 杭州:控制500+个路口; ▪ 东莞:控制200+个路口; ▪ 宁波:控制200+个路口; ▪ 海口:100 +个路口;
7
国家精品课程:交通控制与管理
交通信号控制
澳大利亚的智能运输系统的地位 得到国际性确认
美国的第一个智能运输系统示范工程 1st ITS Demonstration Project in USA
– FAST-TRAC Project (1992) in Oakland County,Michigan (奥克兰,密歇根州) • 采用澳大利亚的 SCATS 自适应交通控制系统作为它的 主干-先进交通管理系统 (ATMS). • 使用视频检测器技术
• 中央管理级安装在与系统中任何一个 区域管理控制计算机上
2020/9/18
15
国家精品课程:交通控制与管理
交通信号控制
中央控制器的作用
▪ SCATS是以模块化结构设计的,可以应用于小、中、 大规模的城市。
▪ 通常在多个区域计算机组成的系统中,需要一个管理计 算机,负责数据的输入、采集、监测、数据分析、系统 记录与备份等管理性工作,以简化大系统的运营管理。
➢ 是一个交通管理系统 ➢ 设备管理及故障报告 ➢ 数据采集及分析
➢ SCATS 适用环境广泛 ➢ 对不同的道路系统做不同的配置 ➢ 采用PC机,操作与维护方便 ➢ 超过30年历史及悉尼奥运会的实践检验
➢ 是智能交通系统(ITS)平台 ➢ 可集成公交优先和车辆行驶时间系统 ➢ 与其他ITS系统集成
2020/9/18
– 地址板 – 黄闪单元 – 输出端子 – 通讯隔离 – 电源过滤 – 电源开关及空开输出 – 现场插座
• 控制模块机箱
– CPM-中央处理板 – LCM-灯组控制板(8SG) – PSM-电源板 – LDM-车辆检测板
23
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
线圈车辆检测器
– 这种设计能非常有效的适应交通路口的变化,能对路口 的情况的变化自身作出调整。
– 无须管理人员经常性对系统干预。
– 因此,非常适合交通发展迅速的中国城市。
视频与其他 车辆检测器
F
+ 控制
最佳效果 时间
有效的反馈参 数-DS
2020/9/18
32
国家精品课程:交通控制与管理
交通信号控制
2020/9/18
27
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——通讯
SCATS的通讯
中央管理级、区域管理控制、用户端、与集成平台 等之间的通信是通过TCP/IP协议通讯;
区域控制计算机与路口控制器之间的通讯可以根据 条件通过多种方式实现:
1、FSK调制电话线通讯(沈阳、上海…) 2、点对点光纤RS232通讯(杭州、宁波、广州、合 肥…) 3、TCP/IP网络通讯(重庆、苏州、上海(部分)….) 4、无线(GSM)网络通讯(广州(部分)…) 5、以上多种形式并存
• 冲突监视 • 特殊用途输入、输出:12路 • 通讯:FSK、RS232 控制模式: – 手动、定时、感应控制; – 降级无线缆协调; – 黄闪; – 紧急呼叫优先; – 公交优先
22
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——信号机Eclipse
2020/9/18
控制器构造 • 全铝合金设计 • 控制模块化组合 主要部件 • 机箱
区域信号控制中心
区域信号控制 区域控制中心 新增区控中心
中心
1
路口控制器l 路口控制器n 路口控制器l 路口控制器m 路口控制器l 路口控制器m
2020/9/18
13
国家精品课程:交通控制与管理
交通信号控制
SCATS系统结构纲要
▪ SCATS中央管理控制级 ▪ SCATS区域管理控制级 ▪ SCATS系统工作站 ▪ SCATS系统的路口控制器-Eclipse ▪ SCATS系统的通讯
最成功最先进的城市智能交通控制系统之一; ▪ SCATS目前是唯一的由使用者开发的成熟先进
的系统
2020/9/18
4
国家精品课程:交通控制与管理
交通信号控制
SCATS 是先进城市理想的交通管理系统 (智能运输系统主干部分)
事件检测 与处理
互联网信息
2020/9/18
可变标志
电子可变 车道系统
收音机/电台 提供现时交通信息
2020/9/18
14
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——中央管理控制级
SCATS中央管理控制级:
• 采用IBM兼容工业型计算机或服务器 • 要求极低:
最低要求:CPU 350MHZ 内存 256MB 硬盘 20G
• 每个中央管理级计算机可以管理64个 区域管理控制计算机
• 每个区域管理控制计算机可以管理控 制250个路口信号控制器
SCATS使用个人计算机(PC)作为区域计算机,每台PC机可 以控制128个路口。当系统超过这个数量时,增加区域计算 机即可。
2020/9/18
17
国家精品课程:交通控制与管理
交通信号控制
区域机的作用
SCATS使用运行Windows 的PC机为区域计算机,用 异步串口接口和调制解调器(使用电话线)或ATM等网络 等为通讯手段,将区域计算机和路口控制器连接在一起。 这使得计算机硬件和操作系统软件的维护工作非常容易进 行。
SCATS系统基本原理
高效的“集装箱运输”原理: 1、交通信号最佳工作条件是把交通车流分配为一个个车队(集装箱式)
的通行
2、“红灯”可以起到“整理车流”的作用 3、“车间距”控制原理,与车型无关 4、协调功能
2020/9/18
33
国家精品课程:交通控制与管理
可变 时速标志
5
国家精品课程:交通控制与管理
交通信号控制
SCATS是什么?
SYDNEY
悉尼
COORDINATED 协调