浅谈倒车雷达工作原理及常见故障分析Word版

浅谈倒车雷达工作原理及常见故障分析
[摘要]本文简要的分析了超声波倒车雷达的原理,并对常见故障现象进行分析。[关键词]倒车雷达、工作原理,超声波,故障分析
引言
倒车雷达又称泊车辅助系统,一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松,预防事故的发生,保障行车安全.
一、工作原理
倒车雷达由超声波传感器(俗称探头),控制器和显示器(或蜂鸣器)等部分组成.倒车雷达一般采用超声波测距原理,在控制器的控制下由传感器发射超声波信号,当遇到障碍时,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出其他警示信号.从而达到安全泊车的目地.
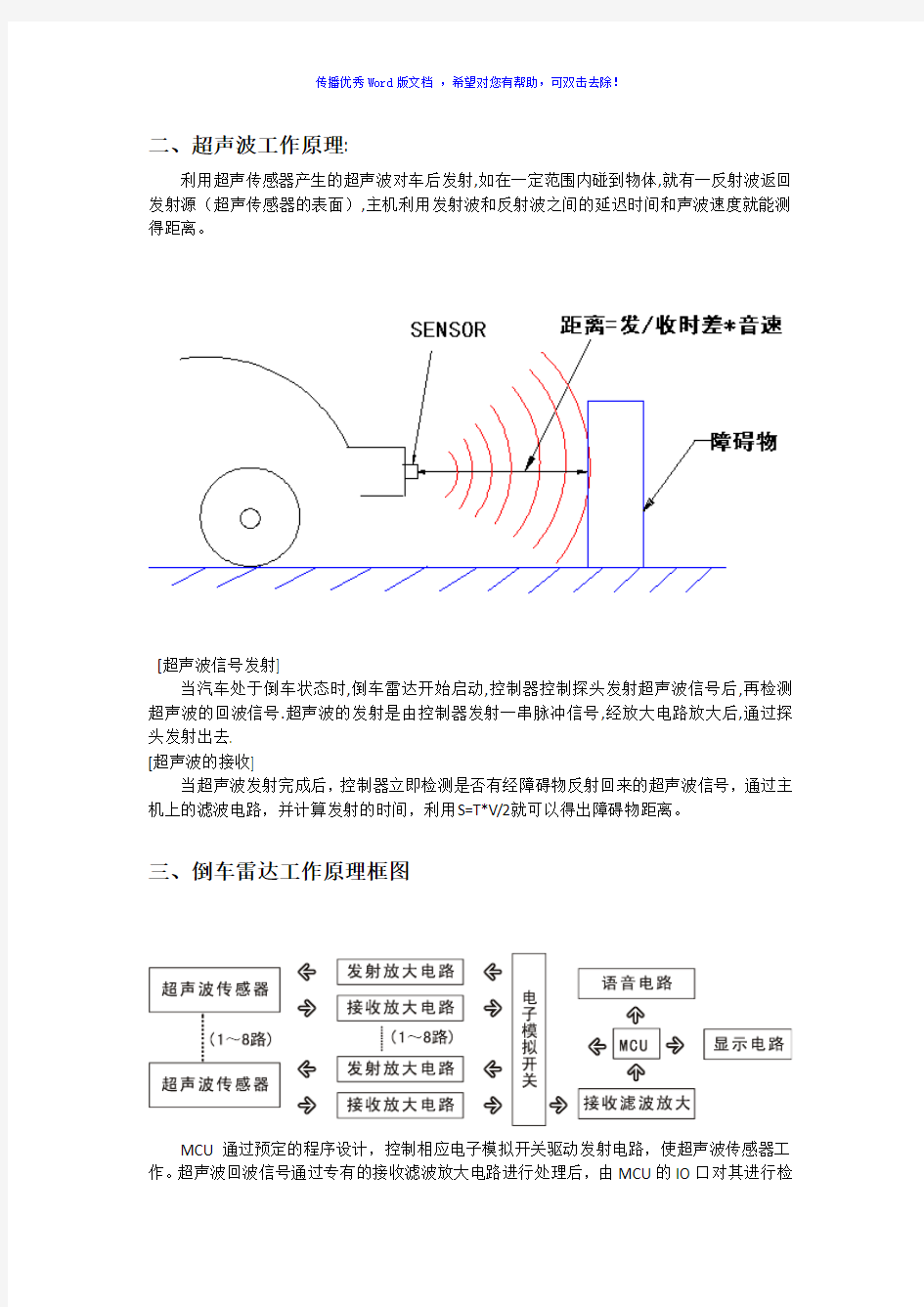
二、超声波工作原理:
利用超声传感器产生的超声波对车后发射,如在一定范围内碰到物体,就有一反射波返回发射源(超声传感器的表面),主机利用发射波和反射波之间的延迟时间和声波速度就能测得距离。
[超声波信号发射]
当汽车处于倒车状态时,倒车雷达开始启动,控制器控制探头发射超声波信号后,再检测超声波的回波信号.超声波的发射是由控制器发射一串脉冲信号,经放大电路放大后,通过探头发射出去.
[超声波的接收]
当超声波发射完成后,控制器立即检测是否有经障碍物反射回来的超声波信号,通过主机上的滤波电路,并计算发射的时间,利用S=T*V/2就可以得出障碍物距离。
三、倒车雷达工作原理框图
MCU通过预定的程序设计,控制相应电子模拟开关驱动发射电路,使超声波传感器工作。超声波回波信号通过专有的接收滤波放大电路进行处理后,由MCU的IO口对其进行检
测,
当全部传感器工作完成后,由系统通过完通过特定的算法得出最近的距离,并驱动显示电路工作,来提醒驾驶者最近的障碍物距离及方位。
四、超声波传感器介绍
整个倒车系统的最核心部件,其作用是发出超声波及接收超声波。影响其性能的主要参数有:外形尺寸与工作频率。
1.倒车雷达超声波传感器频率目前常用的有:40KHZ,48KHZ,58KHZ等等。
1.1 频率为40KHZ传感器侦测范围图
1.2.频率为48KHZ传感器侦测范围图
1.3.频率为58KHZ传感器侦测范围图
选用不同频率的传感器以满足不同车型的实际要求。
2.性能与高度、仰角关系
2.1 倒车雷达的性能与传感器的安装高度、安装位置的保险杆仰角关系最为密切.
2.2由上述传感器的原始特性:可以了解到其基本侦测角度水平垂直的比值为2:1而且
约为120°:60°.
2.3水平探测角度的示意图
照地