ALIGN 亚拓 GPRO 三轴陀螺仪的安装与调试方法
陀螺仪的安装以及设定

陀螺仪的安装以及设定陀螺仪在模型直升机上扮演着相当重要的角色,尾舵的安定与否,就全看它的表现。
随着科技的进步,从机械式陀螺仪、压电式陀螺仪,一直演进到目前最流行的机头锁定(Heading Lock)压电式陀螺仪。
虽然设定的方法,因品牌及型号的不同而有所差异,但其基本的观念都是一样的。
所以只要观念正确,无论是使用哪一种陀螺仪,应该都可轻松上手。
㈠陀螺仪的种类1.由构造来区分机械式:感测器采用马达高速运转来产生陀螺效应,再利用电磁感应器来侦测偏向速度。
优点是价格低廉,缺点是反应慢、准确度低、耗电、寿命短、重量大、怕振动。
(例如Futaba 153 BB)压电式:感测器采用压电晶体。
优点是反应快、准确度高、耗电小、寿命长、重量轻,缺点是价格贵。
但近年来价格有愈来愈低廉的趋势。
温度是压电式陀螺仪的致命伤,会导致中立点偏移,所幸压电式陀螺仪内部都有温度自动修正的设计。
(例如JR NEJ-900、JR NEJ-3000、Futaba G-301、Futaba G-501) 锁定式:最新式的陀螺仪。
强调能使尾舵保持稳定不会偏向,没有"风标效应"(Weathercock Effect)。
适合3D花式特技使用,但却不适合F3C的飞行动作。
(例如JR 550T、JR 5000T、Futaba GY-501、CSM 360、CSM 540)2.由感度来区分单段式:只能设定一种感度,由控制盒上的旋纽来调整感度值。
优点是价格低廉,缺点是只有一种感度、无法同时适合静态飞行及上空飞行。
(例如JR G-400、GWS PG-01、CSM 180)二段式:能设定二种感度,您的遥控器必须具备切换感度的功能。
依调整感度值的方式不同,又可分为以下二种。
由控制盒上的旋纽来调整感度值。
H(high)旋纽控制高感度值,L(low)旋纽控制低感度值。
(例如Futaba G-501)控制盒无调整感度的旋纽,必须由遥控器来调整感度值,所以您的遥控器必须具备设定感度的功能。
陀螺仪

【规格】
1. 外形尺寸:26mm*24mm*9mm
2. 重量:12g
3. 工作电压和电流:DC 4.5-6.5V,工作电流≈50mA,最大电流<100mA
4. 适用舵机:模拟舵机(频率 50Hz)、数码舵机(频率 333Hz),舵机中点 1520us
1
User Manual of Gyro G3
Doc Ver. HW-100A-G3-091228 Page 2 of 7
2
User Manual of Gyro G3
【各种工作模式下 LED 的状态】
在不同模式下,陀螺仪面板上最右侧的 LED #S 的状态不同。如下表所示(LED 序号请
参见第 2 页的图示)。
【免责声明】 模型运动本身具有一定的风险,该运动要求玩家具有一定的专业知识和技能。本产品在
设计时已经采取多重安全保护措施,但设备的工作环境和条件差别很大,无法完全预计。我 们强烈建议您尽可能为设备提供良好的安装和运行条件, 确保供电以及控制信号的稳定可 靠, 确认飞行场地的安全。 本公司不承担因使用陀螺仪而造成的直接及间接损失。本产品 一经拆封使用,视同您已认可以上全部条款。
警告:陀螺仪通电前,请务必将遥控器置为方向锁定模式,否则陀螺仪无法正常工作。 4. 一些老款或者简易的遥控器上可能没有陀螺仪感度值设置的选项,此时可以通过调整感
度通道行程量(ATV)控制陀螺仪的敏感度。 以下范例使用 Futaba FF6 遥控器,进入通道行程量(ATV)的功能项,分别设定
CH5(感度通道)的 ATV 为一般飞行模式(陀螺仪处于方向锁定模式,陀螺仪敏感度 72%,CH5 开关扳向前方)及 Idle 飞行模式(陀螺仪处于普通模式,陀螺仪敏感度 54%, CH5 开关扳向后方)。使用 CH5 开关切换陀螺仪的敏感度。 注意: 使用 CH5 开关切换陀螺仪的敏感度时,无法同时将一般飞行模式和 Idle 飞行模 式设置为方向锁定模式,CH5 开关必须是一侧为方向锁定模式,一侧为普通模式,而且 方向逆转(REVERSE)功能项中的 CH5 需设置为 NORM (即 NORMAL)。
新手必读教材,亚拓450组装到调试全套图文详细讲解

亚拓450从零安装调试到完工,新手必读教材,全套图文详细讲解T REX 450 SE-组装方式/调整/设定参考第1步:首先将机身固定柱和主轴固定座及电池固定座左侧两颗螺丝拆下,方便服务器安装第2步:将第一颗服务器由内往外安装第3步:同样的由内往外安装第二颗服务器,并将讯号线排列整齐用速线带固定,切记,1.速线带头在机身内侧2.在固定于册版的地方用透明胶带包覆两圈,防止组装时讯号线破损第4步:将伺服机讯号线由内侧版经沟槽穿往机身外侧第5步,将服务器的讯号线整理后,再用蛇管包覆第6步:将机身固定柱和主轴固定座及电池固定座左侧两颗螺丝装回原来位置记得要上螺丝胶喔第7步:将中间的侧版固定柱套入,并对准螺丝孔.将马达固定座装上下侧版第8步:1.利用马达固定座将上.下侧版组合2.将中侧版固定柱锁上螺丝第9步:将服务器讯号线穿过上.下侧版并将左侧三颗螺丝锁上第10步:右侧版先锁上1的螺丝,其它两颗先不锁第11步:将所需的马达同齿固定后,在将马达固定在马达坐上第12步:将马达线穿过机身底板和组装好的脚架,并将脚架固定第13步:将皮带穿过尾管(注意皮带的方向性)并将尾服务器座套入尾管,然后跟机身组合,并将垂直/水平/支撑架装上,调整皮带的松紧度后上紧尾管固定座的螺丝第14步:金属尾传动轮座组固定前,需确认与尾管固定座呈平行状态第15步:陀螺仪的整线后用蛇管包覆第16步:将陀螺仪用双面胶固定在尾管固定座上后,将包覆好的讯号线穿过上.下侧版后再将右侧版的两颗螺丝上紧(陀螺仪安装在尾固定座的下方,以防炸机时被副翼打到)第17步:先抓出尾服务器的中点,并将球头固定在服务器的摆臂上(上下两个圈是行程终点),并将服务器固定在尾伺服座上第18步:装好尾服务器时,套上连杆后,注意,这是重点1,尾舵控制组需在尾主轴中央2.调整尾服务器座让连杆跟尾管平行3.尾服务器摆臂球头需在中点4. 尾连杆和尾管尽量跟尾管呈平行以上确定后在固定尾伺服座螺丝第19步:1.将主轴上的连杆按说明书上的长度组装,并套上摆臂平衡杆先量好两边相等长度后套入平衡杆重垂在装上平衡翼2.将主轴和机身组合第20步:组合好后请注意大齿盘于机身的间隙,不能摩擦到机身或尾传动轮第21步:调整马达铜齿的高度并将铜齿固定螺丝上紧,调整马达与大齿盘的间隙后再将马达固定螺丝上紧第22步:1.用2mm钻尾将欲锁球头的摆臂扩孔2.将球头利用螺母固定在摆臂上3.将多余的摆臂去掉.以免摆动时干涉4.将服务器连杆依说明书长度组装好第23步:将组装好的摆臂套上服务器,先不上服务器螺丝,以便调整时需拆下,此时连杆都是呈垂直状态第24步:接收的整理1.用热缩套管或由机的油管将接收线的前端包覆,以防接收线和侧版接触而出现干扰现象,相信很多人有这个经验2.用1mm的泡棉将接受包覆并用透明胶带在包覆,以防日久泡棉脱落,这可以防止摔机后的碰撞以以多一层的防干扰的作用第25步:1.用双面胶将接收固定在底板2.将讯号线接上接收第26步:1.用打火机熏烤将热缩套管定型你要的角度2.在用热缩套管将整理的接收线固定在线管上第27步:将电子变速器的讯号线穿过脚架和底板之间并接上接收(马达线先不要接,以便遥控器设定和调机)-----------------------------------以上是机械及电子部件的安装--------------------------第28步:控的设置,打开遥控器进入SWASH TYP,打开选项选择120度第29步:接上电池,将摆臂尽量以90度脚平行装上,并推油门游戏杆以确认伺服机的方向正确,如有反向,可进入REV.SW个别调整正确方向第30步:如摆臂有微些差距,可进入sub trim个别微调至所有摆臂至平行,调整好后记得看看十字盘是否平行,如没平行,调整十字盘连杆使起平行既可第31步:接下来先将主旋翼做好静态平衡后,装上直升机,并将服务器螺丝锁上第32步:进入遥控器选项里的PIT.CURV.1.并将油门游戏杆推至中点2.在NORM设定页面3.将EXP显至ON 的位置,这可以自行调整曲线较为顺畅第33步:已有贴配重贴纸的桨为主1.将螺距规套上,并以螺距规的上沿跟平衡杆呈平行2.此时应为0度,如没0度,可依差距大小调整连杆使其成为O度第34步:将油门游戏杆推至最高并记下为+11度第35步:将油门推至最低,并记下为-11度,对高手来说,这个螺距应该是可以的第36步:如想减少螺距行程,可进入swash mix的PIT降低%数(5%为一度左右),所以我降了10%,此时螺距为(-9 0 +9)这应该适合一般飞友第37步:接下来是在进入PIT. CURV设定NORM的螺距,第一点位置设定为-2度,此时数据为38%第38步:接着将油门游戏杆推至中点3的位置(约是停悬点),为+5度,此时该点数据为75%第39步:在来是将刚刚设定的38%和75%以及最高的100%三点中的曲线,设定调整一条顺畅的拋物线,这样一来,在操控的过程会顺畅许多,不会又高高低低的情况发生第40步:接下来进入THRO CHRV的NORM页面设定油门曲线,首先在第3点(中点)位置将数据设定为68%第41步:接下来是一般人常遇到也是最让你头痛的尾巴设定,如果你刚刚再组装的时候有按照图示安装,基本上尾服务器的中立点已经抓好了,所以不会有偏的问题发生,只要了解陀螺一的功能和调整就可以了,A.接上电源如果灯恒亮,就表示锁头模式,1数字/模拟的切换开关,如果你用的尾舵机不是数码的,必须将开关切至OFF的位置,如果是数码舵机择切换至ON的位置2.陀螺仪反向开关3.延迟开关,如果是数字服务器这个开关可以不用管他,在O的位置.如是用模拟服务器,感度以将很低仍有追踪现象,可调整此开关改善4.陀螺仪行程开关,如行程太大会产生操控尾舵时,定点会有抖几下的情况,可降低此行程来改善第42步:确认方向舵方向,通常尾舵控制组跟方向游戏杆是反方向移动,这才是正确的第43步:确认好后接下来进入遥控器GYRO SENS AUTO页面设定陀螺仪感度POS.0为一般飞行感度设定POS.1为3D飞行感度设定设定好感度后不要忘了也要进入由上角将POS.0和POS.1个别设定好如此一来,感度才会跟着你切换的飞行模式而改变第44步:设定好后,将电子变速器和马达的线依颜色接上,并将固定第45步:设定的过程中,有些飞友会利用这个页面调整服务器的行程,来达到所需的螺距,这是错误的,就算调整好了,+-数据不相等,这会产生打动作时,左右的速度不均现象第46步:还有一种错误的调整螺距的方式,如图示,降低/提高螺距曲线的%数来迎合所需的螺距,这也会让你在操控时,游戏杆上下不均匀,也缩短了螺距变化的空间,所谓一步错步步错!第47步:接下来是调整双桨,以量螺距的桨为机准桨(贴配重贴纸的桨),此桨不动视另一只桨高低作调整就可以了,完工!资料来源:亚拓台湾官网论坛编辑制作:5IMX之dtjj(欢迎传播,功德无量)。
全自动三轴仪的安装与调试过程

全自动三轴仪的安装与调试过程把试验机和压力控制器按放在稳固、平整的台面上,按以下的步骤连接。
1.管路的连接⑴压力室上孔压口,用三通阀一端连接压力传感器,另一端与排水口上的三通连接;⑵压力室的围压阀与排水阀,分别与压力控制器上围压输出端与反压输出端连接;(快速接头连接时直接插入;取出时将快速接头上的压环往里压,再将尼龙管拔出)⑶储水瓶洗净装入经排气处理的蒸馏水或纯净水,加上盖安放在压力控制器上或试验机旁,与压力控制器(水嘴在背面)用管路连接。
2.电路的连接⑴电源插座:将电源线与220伏交流电插座相连;(电源开关上红灯亮表示电源接通)⑵计算机:与计算机连接;⑶力:与轴向力传感器,或测力环上的位移传感器连接;⑷孔压:与孔压传感器连接。
3.信号连接压力控制器和试验机上的连接端口,如同采样盒一样,用导线与计算机或采样盒连接起来。
仪器的调试1. 排气处理的目的是,排除压力控制器中围压调压筒、反压调压筒,水泵与储水瓶、压力室、阀门,接头及管路组成的封闭系统内的气体(泡)。
初次使用或长期停用后启动时,尤其重要。
经常更换储水瓶里的排气水,防止围压水中已被土粒污染或其它腐蚀性介质的进入,保持水质洁净、维护系统性能、延长使用寿命。
长期停用应将压力控制器里的水全部排除。
通过压力控制器上液晶显示,进入相关操作视窗:⑴转入“自检”视窗,先后对围压调压筒、反压调压筒排气。
按注水键启动水泵、结合排水键,反复进行注水与排水操作,直至排向储水瓶里的水无气泡为止。
在此期间人不要离开,避免大量水溢出或水泵长时间工作。
通过围压、反压视窗,还可监控测试过程中的实测值与设定值的变化;⑵转入“容器”视窗,按功能键对应标注,分别向压力室作注水排气操作。
其中F2、F3、F4键对进水孔操作,F5、F6键通过反压力筒对排水孔操作。
操作键功能如下:注水/停止——启动水泵将储水瓶里的水注入压力室 / 注水终止。
排水/停止——(试验结束后)将压力室里的水排出 / 排水终止。
G3 陀螺仪说明书
G3陀螺仪使用说明书【特点】G3陀螺仪采用新一代MEMS (微电子机械系统)高级角度传感器件和先进的AVCS(Angular Vector Control System,角度向量控制系统)算法,内建温度补偿,具有高精度的方向控制能力。
此陀螺仪兼有普通和方向锁定(Head lock)两种工作模式,利用感度(Gain)通道进行两种模式的切换及感度值的设定。
G3陀螺仪采用全数字化的参数设定方式,避免了因电位器机械磨损所造成的工作不稳定现象。
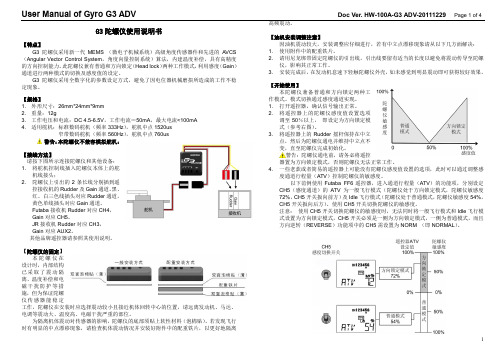
【规格】1. 外形尺寸:26mm*24mm*9mm2. 重量:12g3. 工作电压和电流:DC4.5-6.5V,工作电流≈50mA,最大电流<100mA4. 适用舵机:标准数码舵机(频率333Hz),舵机中点1520us窄带数码舵机(频率560Hz),舵机中点760us警告:本陀螺仪不兼容模拟舵机:【接线方法】请按下图所示连接陀螺仪和其他设备:1. 将舵机控制线插入陀螺仪本体上的舵机线接头;2. 陀螺仪上引出的2条长线分别插到遥控接收机的Rudder及Gain通道。
黑、红、白三色线插头对应Rudder通道,黄色单线插头对应Gain通道。
Futaba接收机Rudder对应CH4,Gain对应CH5。
JR接收机Rudder对应CH3,Gain对应AUX2。
其他品牌遥控器请参照其使用说明。
【陀螺仪的固定】本陀螺仪在设计时,内部结构已采取了震动隔离、温度补偿和电磁干扰防护等措施,但为保证陀螺仪传感器能稳定工作,陀螺仪在安装时应选择震动较小且接近机体回转中心的位置,请远离发动机、马达、电调等震动大、温度高、电磁干扰严重的部位。
为隔离机体震动对传感器的影响,陀螺仪的底部须贴上软性材料(泡棉贴)。
若发现飞行时有明显的中点漂移现象,请检查机体震动情况并安装好附件中的配重铁片,以更好地隔离高频震动。
【油机安装调整注意】因油机震动较大,安装调整应仔细进行,若有中立点漂移现象请从以下几方面解决:1. 使用附件中的配重铁片。
振动陀螺仪安装方法说明书
振动陀螺仪安装方法说明书一、准备工作在开始安装振动陀螺仪之前,请确保您具备以下所需物品:1. 振动陀螺仪设备及其附件;2. 安装支架或架子;3. 所需的工具,如螺丝刀、扳手等。
二、安装步骤1. 确定安装位置在安装振动陀螺仪之前,先要确定其最佳安装位置。
一般来说,振动陀螺仪应安装在稳固的表面上,避免与其他设备存在干扰。
同时,还需要考虑到安装位置是否方便维护和观察读数。
2. 安装支架或架子将振动陀螺仪的支架或架子安装在所选定的位置上。
确保支架或架子稳固可靠,并能够承受振动陀螺仪的重量。
根据实际需要,可以选择固定型支架或可调节角度的架子。
3. 连接附件将陀螺仪设备连接好所需的附件,包括电源线、数据线等。
确保连接牢固,并且线路不会造成其他设备的绊倒或搭乱。
4. 安装振动陀螺仪将振动陀螺仪设备放置在支架或架子上,确保安装牢固。
如果有固定螺丝孔,使用相应的螺丝将振动陀螺仪固定在支架上。
如果是可调节角度的架子,根据需要转动角度和方向,确保振动陀螺仪的感应轴正确对准目标。
5. 调整陀螺仪姿态根据实际需要,调整振动陀螺仪的姿态。
使用各种可调节部件,如支架角度、装置高度等,确保陀螺仪装置与目标设备平行且保持水平。
必要时,可以使用水平仪或其他工具帮助校准。
6. 确保固定稳固在安装完毕后,确保振动陀螺仪设备牢固地固定在支架或架子上。
检查螺丝和连接件是否牢固,避免松动或摇晃。
三、安全注意事项1. 在安装振动陀螺仪时,务必断开电源,以防电击事故发生。
2. 安装过程中避免将脚或手指放置在支架或架子下方,以免造成意外伤害。
3. 在操纵陀螺仪设备时,注意避免强烈冲击和振动,以免影响其工作效果和寿命。
4. 如果发现振动陀螺仪设备存在故障或异常情况,请及时停止使用,并联系专业人员进行检修或维护。
请在按照以上步骤完成振动陀螺仪的安装后,再开启电源,并配置相关软件进行使用。
如有其他问题,请参考设备说明书或咨询技术支持人员。
祝您顺利完成安装,愉快地使用振动陀螺仪!。
陀螺全站仪使用说明书
陀螺全站仪使用说明书目次1概述1.1功能和用途1.2主要性能参数2仪器组成3工作原理4使用方法4.1三脚架架设4.2陀螺全站仪主机架设4.3维度输入4.4测量程序4.5数据处理4.6仪器撤收5仪器常数标定5.1仪器常数标定方法5.2仪器常数修正方法6电源使用说明7典型故障及故障排除方法8使用注意事项9维护保养10仪器故障及解决方法1概述1.1功能和用途陀螺全站仪是全自动陀螺仪,其主要功能是提供北向方位基准,可为火炮、雷达提供初始方位基准,并可应用于大地测量、工程测量和矿山贯通测量等领域。
1.2主要性能参数仪器主要技术指标见表1。
表1 陀螺全站仪主要技术指标表2仪器组成产品配套情况见表2。
表2 陀螺全站仪产品配套表3工作原理陀螺全站仪的工作原理是用吊丝悬挂重心下移的陀螺灵敏部敏感地球自转角速度的水平分量,在重力作用下,产生一个北向进动的力矩,使陀螺敏感部主轴(即H向量)围绕子午面往复摆动,通过光电传感器将陀螺灵敏部往复摆动的光信号,转换为电信号,传送给控制系统,控制系统自动跟踪陀螺灵敏部的方位摆动,并对灵敏部进行加矩控制,解算出被测目标的北向方位角。
4使用方法陀螺全站仪主机的使用包括全站仪的使用,全站仪的详细使用方法参见相关全站仪的使用说明书。
4.1三脚架架设在测站架设三脚架,架设时应使三脚架的三个脚尖大致与测点标志中心基本等距,并注意脚架的张角和高度,伸缩脚架腿使圆水准器概略居中。
4.2陀螺全站仪主机架设陀螺全站仪主机架设按以下步骤进行操作。
a.取出陀螺全站仪主机。
三脚架架设完毕后,从包装箱中取出主机(切勿大角度倾斜或倒置),然后将其平稳置于三脚架上。
b.陀螺全站仪主机粗对北。
取出包装箱内的磁罗盘,按照其使用说明书规定的方法,确定当地大致北向;将陀螺寻北仪主机粗对北标记置于大致北向(北向可以借助磁罗盘确定,其使用方法见磁罗盘使用说明书);然后顺时针方向旋转锁紧三脚架上的三个对心手轮。
c.取出锂离子电池,放置在三脚架的固定位置上,然后将2芯电源电缆两端分别与主机和电池连接。
陀螺仪基本操作方法
陀螺仪基本操作方法陀螺仪是一种可以测量和检测物体角速度的设备,广泛应用于飞行器、导航设备、运动控制器和虚拟现实系统等领域。
正确操作和使用陀螺仪可以保证其测量结果的准确性和稳定性,以下是陀螺仪的基本操作方法:1. 放置和安装:在使用陀螺仪之前,首先应该选择一个稳定平整的表面放置陀螺仪。
确保陀螺仪的机械部分处于正常工作状态,并调整陀螺仪的位置和姿态,使其能够测量到所需的物体角速度。
2. 连接电源:将陀螺仪与电源连接,并根据陀螺仪的使用说明书来确定正确的电压和电源极性。
在连接电源之前,确保电压和电流能够满足陀螺仪的要求,以免损坏设备。
3. 校准:在使用陀螺仪之前,建议进行校准操作。
校准的目的是消除陀螺仪在安装和使用过程中可能引入的误差。
校准的方法和步骤可能因陀螺仪型号和制造商而有所不同,但通常包括静态校准和动态校准两种方式。
- 静态校准:将陀螺仪置于静止状态,通过设备菜单或按钮选择校准功能。
在校准过程中,陀螺仪会自动测量和记录当前的零偏值,并在测量过程中对其进行补偿,以提高测量精度。
- 动态校准:将陀螺仪固定在稳定的运动轨道上,通过设备菜单或按钮选择动态校准功能。
在校准过程中,陀螺仪会自动测量和记录在运动过程中产生的误差,并在测量过程中对其进行补偿,以提高测量精度。
4. 启动和停止测量:在校准完成后,可以启动陀螺仪进行测量。
通过设备按钮、软件界面或远程命令等方式启动陀螺仪的测量模式,开始记录物体的角速度。
在测量过程中,确保测量环境的稳定性,并尽量避免外界干扰,以保证测量结果的准确性。
- 启动测量:按下陀螺仪上的启动按钮或通过设备菜单等方式启动测量模式。
在启动之前,可以根据需求设置测量参数,如采样率、滤波器和输出格式等。
- 停止测量:按下陀螺仪上的停止按钮或通过设备菜单等方式停止测量模式。
在停止测量之后,可以导出或记录测量数据,并关闭设备以节省能源。
5. 数据处理和分析:陀螺仪测量得到的角速度数据可以进一步进行数据处理和分析。
亚拓安装调试图解

亚拓450从零安装调试详细讲解T-REX 450 SE-组装方式/调整/设定参考第1步:首先将机身固定柱和主轴固定座及电池固定座左侧两颗螺丝拆下,方便服务器安装第2步:将第一颗服务器由内往外安装第3步:同样的由内往外安装第二颗服务器,并将讯号线排列整齐用速线带固定,切记(1.速线带头在机身内侧2.在固定于册版的地方用透明胶带包覆两圈,防止组装时讯号线破损)第4步:将伺服机讯号线由内侧版经沟槽穿往机身外侧第5步,将服务器的讯号线整理后,再用蛇管包覆第6步:将机身固定柱和主轴固定座及电池固定座左侧两颗螺丝装回原来位置记得要上螺丝胶喔第7步:将中间的侧版固定柱套入,并对准螺丝孔.将马达固定座装上下侧版第8步:1.利用马达固定座将上.下侧版组合2.将中侧版固定柱锁上螺丝第9步:将服务器讯号线穿过上.下侧版并将左侧三颗螺丝锁上第10步:右侧版先锁上1的螺丝,其它两颗先不锁第11步:将所需的马达同齿固定后,在将马达固定在马达坐上第12步:将马达线穿过机身底板和组装好的脚架,并将脚架固定第13步:将皮带穿过尾管(注意皮带的方向性)并将尾服务器座套入尾管,然后跟机身组合,并将垂直/水平/支撑架装上,调整皮带的松紧度后上紧尾管固定座的螺丝第14步:金属尾传动轮座组固定前,需确认与尾管固定座呈平行状态第15步:陀螺仪的整线后用蛇管包覆第16步:将陀螺仪用双面胶固定在尾管固定座上后,将包覆好的讯号线穿过上.下侧版后再将右侧版的两颗螺丝上紧(陀螺仪安装在尾固定座的下方,以防炸机时被副翼打到)第17步:先抓出尾服务器的中点,并将球头固定在服务器的摆臂上(上下两个圈是行程终点),并将服务器固定在尾伺服座上第18步:装好尾服务器时,套上连杆后,注意,这是重点1,尾舵控制组需在尾主轴中央2.调整尾服务器座让连杆跟尾管平行3.尾服务器摆臂球头需在中点4. 尾连杆和尾管尽量跟尾管呈平行以上确定后在固定尾伺服座螺丝第19步:1.将主轴上的连杆按说明书上的长度组装,并套上摆臂平衡杆先量好两边相等长度后套入平衡杆重垂在装上平衡翼2.将主轴和机身组合第20步:组合好后请注意大齿盘于机身的间隙,不能摩擦到机身或尾传动轮第21步:调整马达铜齿的高度并将铜齿固定螺丝上紧,调整马达与大齿盘的间隙后再将马达固定螺丝上紧第22步:1.用2mm钻尾将欲锁球头的摆臂扩孔2.将球头利用螺母固定在摆臂上3.将多余的摆臂去掉.以免摆动时干涉4.将服务器连杆依说明书长度组装好第23步:将组装好的摆臂套上服务器,先不上服务器螺丝,以便调整时需拆下,此时连杆都是呈垂直状态第24步:接收的整理1.用热缩套管或由机的油管将接收线的前端包覆,以防接收线和侧版接触而出现干扰现象,相信很多人有这个经验2.用1mm的泡棉将接受包覆并用透明胶带在包覆,以防日久泡棉脱落,这可以防止摔机后的碰撞以以多一层的防干扰的作用第25步:1.用双面胶将接收固定在底板2.将讯号线接上接收第26步:1.用打火机熏烤将热缩套管定型你要的角度2.在用热缩套管将整理的接收线固定在线管上第27步:将电子变速器的讯号线穿过脚架和底板之间并接上接收(马达线先不要接,以便遥控器设定和调机)------------------以上是机械及电子部件的安装---------------第28步:控的设置,打开遥控器进入SW ASH TYP,打开选项选择120度第29步:接上电池,将摆臂尽量以90度脚平行装上,并推油门游戏杆以确认伺服机的方向正确,如有反向,可进入REV.SW个别调整正确方向第30步:如摆臂有微些差距,可进入sub trim个别微调至所有摆臂至平行,调整好后记得看看十字盘是否平行,如没平行,调整十字盘连杆使起平行既可第31步:接下来先将主旋翼做好静态平衡后,装上直升机,并将服务器螺丝锁上第32步:进入遥控器选项里的PIT.CURV.1.并将油门游戏杆推至中点2.在NORM设定页面3.将EXP显至ON的位置,这可以自行调整曲线较为顺畅第33步:已有贴配重贴纸的桨为主1.将螺距规套上,并以螺距规的上沿跟平衡杆呈平行2.此时应为0度,如没0度,可依差距大小调整连杆使其成为0度第34步:将油门游戏杆推至最高并记下为+11度第35步:将油门推至最低,并记下为-11度,对高手来说,这个螺距应该是可以的第36步:如想减少螺距行程,可进入swash mix的PIT降低%数(5%为一度左右),所以我降了10%,此时螺距为(-9 0 +9)这应该适合一般飞友第37步:接下来是在进入PIT. CURV设定NORM的螺距,第一点位置设定为-2度,此时数据为38%第38步:接着将油门游戏杆推至中点3的位置(约是停悬点),为+5度,此时该点数据为75%第39步:在来是将刚刚设定的38%和75%以及最高的100%三点中的曲线,设定调整一条顺畅的拋物线,这样一来,在操控的过程会顺畅许多,不会又高高低低的情况发生第40步:接下来进入THRO CHRV的NORM页面设定油门曲线,首先在第3点(中点)位置将数据设定为68%第41步:接下来是一般人常遇到也是最让你头痛的尾巴设定,如果你刚刚再组装的时候有按照图示安装,基本上尾服务器的中立点已经抓好了,所以不会有偏的问题发生,只要了解陀螺一的功能和调整就可以了,A.接上电源如果灯恒亮,就表示锁头模式,1数字/模拟的切换开关,如果你用的尾舵机不是数码的,必须将开关切至OFF的位置,如果是数码舵机择切换至ON的位置2.陀螺仪反向开关3.延迟开关,如果是数字服务器这个开关可以不用管他,在O的位置.如是用模拟服务器,感度以将很低仍有追踪现象,可调整此开关改善4.陀螺仪行程开关,如行程太大会产生操控尾舵时,定点会有抖几下的情况,可降低此行程来改善第42步:确认方向舵方向,通常尾舵控制组跟方向游戏杆是反方向移动,这才是正确的第43步:确认好后接下来进入遥控器GYRO SENS AUTO页面设定陀螺仪感度POS.0为一般飞行感度设定POS.1为3D飞行感度设定设定好感度后不要忘了也要进入由上角将POS.0和POS.1个别设定好,如此一来,感度才会跟着你切换的飞行模式而改变资料来源:亚拓台湾官网论坛第44步:设定好后,将电子变速器和马达的线依颜色接上,并将固定第45步:设定的过程中,有些飞友会利用这个页面调整服务器的行程,来达到所需的螺距,这是错误的,就算调整好了,+-数据不相等,这会产生打动作时,左右的速度不均现象第46步:还有一种错误的调整螺距的方式,如图示,降低/提高螺距曲线的%数来迎合所需的螺距,这也会让你在操控时,游戏杆上下不均匀,也缩短了螺距变化的空间,所谓一步错步步错!第47步:接下来是调整双桨,以量螺距的桨为机准桨(贴配重贴纸的桨),此桨不动视另一只桨高低作调整就可以了,完工!。
固定翼专用3轴陀螺仪使用说明
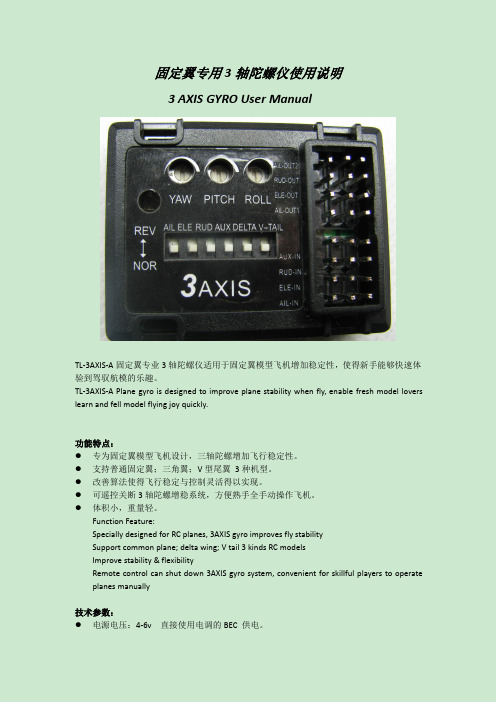
固定翼专用3轴陀螺仪使用说明3AXIS GYRO User ManualTL-3AXIS-A固定翼专业3轴陀螺仪适用于固定翼模型飞机增加稳定性,使得新手能够快速体验到驾驭航模的乐趣。
TL-3AXIS-A Plane gyro is designed to improve plane stability when fly,enable fresh model lovers learn and fell model flying joy quickly.功能特点:●专为固定翼模型飞机设计,三轴陀螺增加飞行稳定性。
●支持普通固定翼;三角翼;V型尾翼3种机型。
●改善算法使得飞行稳定与控制灵活得以实现。
●可遥控关断3轴陀螺增稳系统,方便熟手全手动操作飞机。
●体积小,重量轻。
Function Feature:Specially designed for RC planes,3AXIS gyro improves fly stabilitySupport common plane;delta wing;V tail3kinds RC modelsImprove stability&flexibilityRemote control can shut down3AXIS gyro system,convenient for skillful players to operate planes manually技术参数:●电源电压:4-6v直接使用电调的BEC供电。
●输出信号:普通模拟舵机信号输出。
●外形尺寸:●重量:Technical Parameters:Power voltage:4-6V BEC of ESC supply the power directly.Size:Weight:注意事项:Attention Items:●安装3轴陀螺仪之前需要先确认您的飞机已经正确安装。
Assemble your planes completely before assemble the3AXIS gyro.●关闭遥控器上的V尾混控功能及三角翼混控功能。
全自动三轴仪的安装与调试过程
全自动三轴仪的安装与调试过程把试验机和压力控制器按放在稳固、平整的台面上,按以下的步骤连接。
1.管路的连接⑴压力室上孔压口,用三通阀一端连接压力传感器,另一端与排水口上的三通连接;⑵压力室的围压阀与排水阀,分别与压力控制器上围压输出端与反压输出端连接;(快速接头连接时直接插入;取出时将快速接头上的压环往里压,再将尼龙管拔出)⑶储水瓶洗净装入经排气处理的蒸馏水或纯净水,加上盖安放在压力控制器上或试验机旁,与压力控制器(水嘴在背面)用管路连接。
2.电路的连接⑴电源插座:将电源线与220伏交流电插座相连;(电源开关上红灯亮表示电源接通)⑵计算机:与计算机连接;⑶力:与轴向力传感器,或测力环上的位移传感器连接;⑷孔压:与孔压传感器连接。
3.信号连接压力控制器和试验机上的连接端口,如同采样盒一样,用导线与计算机或采样盒连接起来。
仪器的调试1. 排气处理的目的是,排除压力控制器中围压调压筒、反压调压筒,水泵与储水瓶、压力室、阀门,接头及管路组成的封闭系统内的气体(泡)。
初次使用或长期停用后启动时,尤其重要。
经常更换储水瓶里的排气水,防止围压水中已被土粒污染或其它腐蚀性介质的进入,保持水质洁净、维护系统性能、延长使用寿命。
长期停用应将压力控制器里的水全部排除。
通过压力控制器上液晶显示,进入相关操作视窗:⑴转入“自检”视窗,先后对围压调压筒、反压调压筒排气。
按注水键启动水泵、结合排水键,反复进行注水与排水操作,直至排向储水瓶里的水无气泡为止。
在此期间人不要离开,避免大量水溢出或水泵长时间工作。
通过围压、反压视窗,还可监控测试过程中的实测值与设定值的变化;⑵转入“容器”视窗,按功能键对应标注,分别向压力室作注水排气操作。
其中F2、F3、F4键对进水孔操作,F5、F6键通过反压力筒对排水孔操作。
操作键功能如下:注水/停止——启动水泵将储水瓶里的水注入压力室 / 注水终止。
排水/停止——(试验结束后)将压力室里的水排出 / 排水终止。
陀螺仪器的操作步骤:

陀螺仪器的操作步骤一.仪器部分(开PDM再进行程序)1.连接好仪器。
2.检查电源电压为110V。
3.仪器工作前注意仪器面板(PDM)锁键要在关位,电压调节钮要在最小,电流钮要在4档。
4.打开仪器开关,PDM面板两块显示屏要是亮的。
5.调节电压钮,至红灯微亮,地面测试时应为±62,连接电缆值为±70,如果DATA灯不亮(不闪)。
按下RESEAT键进行复位,仪器正常工作,DATA灯应为连续闪动。
二.程序部分(地面测试)1.开机进行DOS系统,键入WELNAV 进行主菜单所有键入字母要大写。
2.测量时,选A4进行SRG.GYRO.SYS测量系统, 键入V进入新测量。
3.编辑并输入(1)公司名(2)公司地址(3)甲方名称(4)工作编号(5)井号(6)井位置(7)测量日期(8)测量工作师名(9)真值选择NO(10)选择2磁偏角不输在GYRO,REF中反映(及体现)。
4.两次输入加速度计修正编号.一次SRG输量其余三项选择,均选 NO 进入测量。
5.观察测量界面(1)时钟启动。
(2)GYRO FACE 为“0”。
(3)传感器温度。
(4)PDM电压>29V。
(5)重力和≈0.99。
(6)第一次数据记录应向参照物进行测量。
(7)参照物值要返回第一员输入要加上磁偏角。
F1-深度;F2-梯度深度;F3-为飘移率;F4-为飘移检查;F5-为编辑。
6.选择 F5用Page-VP返回第一页修正陀螺参照物值。
7.选择F1回到测量界面,CORR.T.F为参照物值。
(1)陀螺锁定,无数据记录。
(2)预热5分钟,解锁如果测量井,井斜过大(≧20º)且我们知道井眼大概方位,则我们将仪器对准该方位,再解锁。
(3)解锁后,看陀螺工具面,分析是否正常。
(4)陀螺继续预热>15分钟,对参照物,参照物为我们立好的标杆,在井口对正标杆测量时绞车计数器要归“0”,仪器显示要为“0”井深按空格键进行测量。
亚拓 3GX调试

1、DIR模式主要的目的是校(jiao)准摇杆对十字盘的控制方向,单个舵机的正反向,每个舵机中立点的水平,集体螺距的大小,循环螺距(无副翼对应的是翻滚速度分辨率,这一步设置很重要)的大小
2、从DIR模式切到ELE升降摇杆校准的时候,必须将油门螺距摇杆推到中间再按SET键
3,螺距曲线到最后再设置,DIR模式保持默认即可
4、尾舵机行程是两边都要打舵到最大不卡死点,每边都要等红灯闪烁才算记忆
5,延迟对DS520是非常有必要的,450、500要红灯模式,尾舵摇杆略打20-30%再按SET 键即可
6,3GX 1.2版尾舵设置有六项,延迟是第五项,第六项也非常重要,是自旋补偿方向,需要确认3GX安装面方向的,绿色是正面向上,红色是反面向下,必须设置正确。
陀螺仪最简单校准方法
陀螺仪最简单校准方法说实话陀螺仪校准这事,我一开始也是瞎摸索。
你知道吗,我当时就是想让陀螺仪更精准一些,结果搞了半天都没弄好。
我试过好多方法呢。
我先跟你说我第一次尝试的方法啊。
我就是按照设备的基本操作,在它的设置菜单里找到陀螺仪校准的选项,然后就按照提示做了。
比如说,它让我把设备放在一个水平平稳的地方,我就随手放在桌子上,但是那个桌子有点晃,结果怎么校准都不对,这就是没注意小细节的错误,所以这个小细节一定要重视,找个特别平特别稳的地方才行,像那种地震来了都会纹丝不动的桌子或者地面才好。
后来我又试过一种方法,这个方法感觉稍微靠谱一点。
我先把设备静止放了大概三分钟,就像让它先歇一静一静似的,然后再去进行校准操作。
不过这个方法对我来说也不是每次都成功。
有时候校准完了还是有点偏差。
再后来我就和一些玩这种东西比较有经验的人交流了一下,他们给我出了个主意。
他们说在进行校准之前,还要先把设备四周都清理干净,因为有时候如果有磁场或者其他干扰物在附近,校准就不准确。
这我之前真没考虑过啊,我之前总是在电脑旁边还有一堆电线的地方校准,那些电线说不定就有磁场干扰呢。
我总结了一下我觉得比较靠谱的方法。
首先啊,找一个超级平超级稳的地方,像那种大理石做的茶几中间部分就不错,而且周围得打扫干净,一米范围内别有那些乱七八糟的电器或者金属物品啊。
然后把设备静静地放在那一会儿,差不多三分钟就可以,这就像是设备要做战前准备一样,平静下来才能校准好。
最后再按照设置里面的校准提示一步一步小心翼翼地操作,每一步都得认真不能着急。
我不确定这对所有的设备和所有情况都管用,但是我自己试了这么多回,这个方法相对来说成功的概率还是比较大的。
这就是我摸索陀螺仪最简单校准方法的那些事儿,希望能对你有一点帮助。
我还突然想起来一个事儿,在校准的时候,手千万不能抖动设备。
有一次我一边拿着设备一边去点校准,我的手就有点微微抖,那校准出来的结果,肯定是不对的。
所以这个手就像石头一样稳稳地攥着设备别乱动才行,就跟端着一杯满满的水还不能洒出来一样的道理。
亚拓 ALIGN T-REX 700 安装参考(大量图片)7-2

金属稳定控制摇臂(好长的名字),螺丝也是要拆下重新上胶固定锁这组螺丝的同时..我发现700N的金属零件重量都很轻造型上都做了设计,重量感觉都比600N要来的轻!十字盘,体积与600N差不多,但是重量感觉也比较轻!废话少说实际印证一下!700N十字盘53.9g700N剪型臂组24.3g用拔豆钳根不夹住连杆,这样比较省力然后用球头调整扳手将连杆锁入700N的球头比较厚一般市售的连杆扳手插进去会很紧小心的插入后慢慢转,太猛烈的插入可能会造成裂开(打这段文字时,我怎么在冒冷汗?)这次的连杆比较紧,拿出电动工具跟它拼了!不然手真的会起水泡!拿出游标卡尺测量长度连杆通常成双成对,仔细的比对两支连杆的长度吧!调整连杆其实挺烦人的,所以我把烦人的事情一次做完我的习惯是把所有连杆一次全部组装起来,然后成双成对的先用橡皮筋绑好,这样组装到后头会比较顺手这工具是我自己做的,所以买不到我只是比个大概而已,要准确还是用光标卡尺+锐利的双眼比较准!外头有卖铝合金的连杆长度工具,一支不便宜组装平衡翼控制框,依照这样的方式先固定其中一边,到时候组装起来时比较不会歪斜平衡杆上有个平面,平衡翼控制匡上的沈头螺丝先暂时固定在这个平面上将平衡杆与控制匡穿入平衡杆中心座后,分别将平衡杆框上的螺丝点上T43,并且依序逐渐锁紧!测量两边平衡杆的长度达到一致后,将方框上的两个固定螺丝锁紧然后将其中一颗退出、点上T43锁紧,再将另一颗退出点上T43锁紧,这样就完成了平衡杆的长度固定了在装上剪型臂之前,先测试一下剪型臂上的球头是不是顺畅,必要时得用钳子夹一下塑料的部分,让它松一点因为700N的球头比较大一点,所以市售的球头刨刀无法使用这是检查动作,亚拓的球头连杆制作的相当精良,组装时很紧,装入后很松无虚位,真的很棒!省下不少修改的功夫!将十字盘与剪型臂装入主轴(主轴末端有缺口的朝上)然后握住十字盘不动上下滑动剪型臂滑套看看顺不顺一定要保持很顺畅的滑动如果有不顺畅,请拆开剪型臂螺丝之后重新上锁将旋翼头锁上锁的步骤~旋翼头先将上面两根4mm螺丝左右锁入主轴(注意!先不能上紧喔!)再用一根4mm螺丝贯穿主轴,然后以先锁紧上面两颗螺丝再锁紧贯穿主轴螺丝~粉重要的要领!强度一流阿!将平衡翼连杆装入剪型臂中~试试看整个旋翼头的各摆臂摇动是否顺畅喔!旋翼头组装完成!…………………………………………………离合器、定速磁铁组装拆开700NB4零间包,取出离合器组工厂已经假组装完成我们自己必须拆下所有零组件重新上T43防松胶先将离合器组拆解下来可以徒手拆卸,表示这没上胶而且也没锁紧700N中很多零件是这样的假组装是为了便利玩家们了解组装好的模样避免一头雾水摸不着头绪!取下轴承后用去渍油清洗轴承安装面与螺牙的部分插花一下~T43跟R48有啥不同?只要有螺牙的,都是用T43来做为螺丝防松只要没有螺牙,是平面要互相接着的,就是用R48缺氧胶这个轴承随着引擎高达20000rpm 的转速,所以要确实的用R48接着固定在这里我们用绿色的R48缺氧胶先在光滑的安装面点上一部份接着用手指将R48平均的涂抹光滑面(螺牙部分不要涂到喔!!)将轴承确实的装入定位在轴承上方的细螺牙部分点上蓝色的T43防松胶用12mm套筒将铝螺帽锁至定位,然后稍微用点力锁紧即可逆时针旋转离合器齿轮发现这个与离合器接合的部分也没有锁紧一样点上T43后再一次的确实锁紧!将启动杆装上,套上最顶端的小轴承组装好的离合器放入离合器基座中拇指压住启动杆底部,套上启动头,食指或中指轻微压住,锁上沈头螺丝将启动头与启动杆确实固定我的习惯是这样,先将螺丝锁紧,确定各机件运作无误之后,然后退出后点上T43,然后再锁入锁紧这样的作法是因为有些螺丝不是只有锁紧即可,有时会碰到需要细微调整的,提前上螺丝胶,15分钟后螺丝胶硬化,只要重新卸下螺丝后这防松胶就失去效用所以我都是先采取调整好机件,然后再退出螺丝,点上T43防松胶后再锁入离合器基座组合后,先将原本要用来固定在侧板的螺丝先暂时固定在螺丝孔中,避免螺丝遗失往后有这样的单一零组件,我都会先将螺丝暂时固定住,避免遗失安装定速器感应磁铁700N的感应磁铁设计在离合器上,少了离合器打滑的误差,这样的转速感应控制更直接准确!铁汉要建议各位玩家,强烈建议安装定速器,引擎的调整并非一朝一夕可学习透彻(我也还在学),定速器可以避免引擎出现超转现象,也可维持一定的引擎转速,增加引擎寿命(我的意思不是引擎就不用调整,只是好处多多)RCE-G600定速器(另购)的感应磁铁都有做上红色的记号为了让各位看的更清楚,我重新做了记号先将感应磁铁吸取在金属物品上(我用的是剪刀)然后在其中一面涂上记号将划上记号的磁铁取下,把另一颗磁铁朝上的那一面也做上记号做上记号的磁铁是同极性有可能是两个S或两个N总之到最后两颗磁铁安装必须相反就对了!同样先用去渍油+棉花棒将离合器上固定磁铁的孔清洗干净涂上R48缺氧胶之后,用镍子或1.5mm六角起子将磁铁塞入到底固定固定好磁铁之后的样子磁铁一定要装两颗如果只装一颗的话在高速运转下将可能达到将近两公斤左右的偏摆误差!离合器组组装完成!………………………………………………………………………………ECCPM控制组,预先组合拆开700NB1开始组装机身的部分这零件包里头有很多螺丝在组装机身时会陆续使用到找个零件盒把这些螺丝装起来免得弄丢了这零件包里头有一组ECCPM十字盘控制臂依照目前组装进度来说这一组控制臂还没要组装但是看着这么多球头、螺丝等先把这一组控制臂组装起来免得到时候螺丝遗失时欲哭无泪阿!。
ALIGN T-REX 450L DOMINATOR组装介绍

上海FUNFLY回来,拿到了亚拓最新款的450L,开箱贴前面有模友发了不少了,这里就不再啰嗦了,直接装机,并同大家分享一下装机过程。
本人水平有限,如有错误,欢迎大家指正。
以下是装机可能会用到的工具,事先准备好,方便使用。
照片中的工具分别为502胶水,T22螺丝胶,润滑脂,电池(调试电子设备用),舵机测试仪,内六角螺丝刀,简易内六角螺丝刀,十字螺丝刀,小剪刀,数字螺距尺,十字盘调平器,球头钳。
拍完照片,发现忘记了还需要游标卡尺,呵呵呵!其中简易六角螺丝刀,十字螺丝刀,T22螺丝胶为套装内包含,其他需要自备。
打开旋翼头零件包装袋,里面所有零件如下拆散全部零件,照片中为单边桨夹及其零件,为方便大家更换零件,特地标注了一下配件编号,后面的装机照片中,标注了编号的零件都是同现在的450通用的。
没有标注的为450L的专用零件。
这里特别说明一下,亚拓原厂预装的零件全部为假组合,需要自行拆散重新安装打胶将横轴垫圈装入中联将润滑脂均匀的涂抹在止推轴承上组合好止推轴承,两边的垫片上分别标记有 IN和OUT,其中标记IN的那边朝向桨夹内侧安装横轴螺丝套上垫片,打一点T22,注意不要太多,螺丝前面3-4个丝口涂上螺丝胶即可。
新款的横轴螺丝为M2.5*6mm,安装时需要使用2.0mm的螺丝刀将滚珠轴承,止推轴承垫片,止推轴承,依此穿入横轴,并拧入横轴螺丝搞定把安装好轴承的横轴穿入大桨夹,不要遗漏大桨夹和中联之间的那个铝套将横轴穿入中联,在横轴表面涂抹适当润滑油将另一边的桨夹,按照上面的顺序,安装好轴承,并穿入横轴,拧入横轴螺丝。
使用两把螺丝刀,锁紧横轴螺丝将十字盘上的球头拆下,重新打上螺丝胶安装好。
450L的十字盘,主体和450DFC的相同,但是CCPM的3个球头长度不同于450DFC斜盘将DFC连杆打上螺丝胶,拧入大桨夹连杆,请注意DFC连杆的正反,不要装错把DFC球头扣拧入DFC连杆,注意球头扣比较紧,需要慢慢拧入。
三轴陀螺仪的零点校准方法及系统[发明专利]
![三轴陀螺仪的零点校准方法及系统[发明专利]](https://img.taocdn.com/s3/m/c7c81066e53a580217fcfeb8.png)
专利名称:三轴陀螺仪的零点校准方法及系统专利类型:发明专利
发明人:黄强盛,陈笑行,王群,戴萧何,赵越
申请号:CN201811006870.4
申请日:20180830
公开号:CN109186635A
公开日:
20190111
专利内容由知识产权出版社提供
摘要:本发明涉及运动导航技术领域。
本发明一实施例提一种三轴陀螺仪的零点校准方法及系统,其中所述三轴陀螺仪的零点校准方法包括:获取预定时间段内关于三轴陀螺仪的旋转控制量;确定所述预定时间段内关于所述三轴陀螺仪在平行重力方向的Z轴角速度变化率;基于所述Z轴角速度变化率和所述旋转控制量,补偿在平行重力方向的零点偏置。
由此,应用旋转控制量和轴角速度变化率来补偿平行重力方向的零点偏置,能够实现替代传统技术中的地磁传感器,实现了平行重力方向的零点偏差的精确补偿,并还降低了惯导设备的制作成本。
申请人:上海仙知机器人科技有限公司
地址:201203 上海市浦东新区郭守敬路498号8幢19206室
国籍:CN
代理机构:北京中济纬天专利代理有限公司
代理人:季永康
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.事前淮备1. 亚拓 GPro 三轴陀螺仪一组。
2. 电脑端设定软件。
可至这里下载, 目前最新的版本。
/Gpro/CH/3. mini USB 连接线。
4. 已组装好直升机一架,电装走线完成,如使用独立接收则接收事先跟遥控完成对频。
5. 安装好舵机,建议尾舵机信号线先不用连接至GPro。
6. 螺距规。
二.遥控器事前设定1. 建立一新模型。
2. 十字盘类型 (SWASH Plate) : 1 Servo90/H1/Normal。
3. 十字盘混控设定全部取消。
4. 升降,副翼,尾舵的大小舵(DR)/ 指数(Expo)为100/05. 最大行程量(ATV / Travel Adustment / Endpoint) 为1006. SUBTRIM, TRIM 全都为07. 螺距曲线JR为 0-50-100, FUTABA T14SG 为 -100,0,+1008. 飞行模式则依自己需要设定,在GPro 校正时可以在Hold,但在确认油门方向时要在Normal,建议马达线暂时断线,以防无预警启动。
三. 安装电脑软件在之前淮备事项里提供的下载点下载的GPro电脑端设定软件。
Win7/Win8请以管理者身份来安装。
在安装完后,桌面会有GPro软件的快捷方式。
特别感谢台湾模友lliu0130经验分享ALIGN 亚拓 GPRO 三轴陀螺仪的安装与调试方法四. 接收接线方式1.传统外接式接收传统接收的接线方式是用彩虹线连接接收及GPro。
建议可以预先在彩虹线上杜邦头标明:T:油门,A: 副翼,E: 升降,G:尾舵感度,R: 尾舵,P:螺距。
这样才不易接错。
2.FUTABA S-BUS/JR XBUS注: 使用 JR XBUS 接收时要使用 Mode A.3.外接卫星天线 (DSM2,DSMX, DMSS)4.BEC 供电建议如果是双输出的 BEC,1个接在 Battery,1个 Y 接接在 CH1,CH2,CH3 或 RUDD.2条接彩虹线端子不可带 BEC 电力,注意: 选用的Y接线径不可比 BEC 电调的线径细,大多在18-20AWG 上下.且如同一BEC本身具双输出OK,但不要不同2个 BEC电调轮出.这样会有差压回授问题.而 BATT OUT 则留给用来供电给接收.接着遥控器按照Gpro 说明书指示,建立一新的模型,并先跟接收对好频。
CCPM : H1, Normal, 1 Servo90度.螺距曲线JR为 0-50-100, FUTABA T14SG 为 -100,0,+100这时把接收到GPro的彩虹线和BEC供电线接好。
但舵机部分建议先接上CCPM舵机,尾舵机先不接上,等到设定好尾舵频率再接上。
不然万一频率不对就接上恐有锁死烧毁风险。
1. 开遥控器电源。
2. 电脑 Gpro 软件启动。
3. GPro USB接上电脑。
4. 直升机电调/BEC送电。
五. 直升机设定蓝牙密码是四位数,但也不建议跟你银行提款卡密码一样^_^".首次设定,选"直升机设定"后,选"建立全新设定"。
选择接收类型校遥控器各通道信号1.试打摇控器各通道,看是否正确对应到GPro的通道。
如有不对的对应,则按GPro通道对应按钮来调整。
2.试打各通道的方向,如有方向不同的则用遥控器的正反通道来设定。
3.用 Subtrim 调升降,副翼,集体螺距和尾舵四个通道的中立点直到显示0%。
4.最后调遥控器的Travel Adjustment / End Point 直到显示+-100%为止。
这步骤只要调升降,副翼,集体螺距和尾舵。
油门及感度通道信号在电脑上要确认方向对即可,中立点及边界值不用调整。
此部分为校正遥控器,GPro跟直升机舵机,螺距和尾轴滑套行程等之间的相对关系。
此步骤很重要,没有完成之前不能进行飞行参数设定。
而在此步骤中,每一参数都是即时写入GPro,所以在完成第一次校正后,您可以选定要调整的项目单独进行调整。
电调/BEC送电,电脑上就会显示已连接的画面,建议不管你有没有选购蓝牙配件,首先先更新蓝牙密码,预设是0000。
选择接收的种类,如果是以GPro+卫星天线方式(DSM2/DSMX/DMSS),并选好对频方式后,则这时BEC断电再重新送电,GPro就会进入对频模式,对好频再回到这画面。
陀螺仪安装方式及主旋翼旋转方向选择正螺距方向及十字盘种类选择舵臂,十字盘水平及集体螺距零度调整接着在这里调"三平".1.舵机的舵臂水平。
2.十字盘水平。
3.集体螺距0度。
先用左边伺服机微调的CH1,CH2,CH3微调舵臂到水平,同时间利用十字盘配平器调整十字盘水平。
再来调整集体螺距0度,但不建议用集体螺距微调功能。
建议调 Pitch拉杆来调整至集体螺距0度。
接下来选择GPro的安装方向,不用管是在主轴前后,只要管正反装及信号线朝机首或机尾即可;而亚拓机的主旋翼都为顺时针。
在这里选择正螺距时,十字盘是往上或往下,亚拓机选往上。
而十字盘种类为HR-3,当然在配线时,123号舵机的相对位置要注意喔。
在选择十字盘种类后,轻推油门(往正螺距方向),这时如有往下移动的舵机则要用右下角CH123正反向来调整。
直到推正螺距时,CCPM三个舵机都同时往上即可。
正负最大集体螺距及循环螺距调整调整集体螺距正负最大值。
这时把油门收到0,调整负集体螺距最大值,同时间利用下方微调功能调整十字盘水平。
调好后油门推到100%,调整正螺距最大值。
而在循环螺距调整则调整至8度为基准尾舵频率,正反向及行程边界设定注: 调好机后,电调的油门行程也要再重新校正,油门信号经过 GPro后略有不同。
下一篇为GPro飞行特性调整篇...按下设定在8度螺距按钮,再调整至螺距规显示8度为止在这里调整尾舵相关设定,在选好尾舵机频率后才把尾舵机接上。
接着轻打一点点尾舵不可太大,因为左右边界尚未调好,来试正反向。
而尾舵行程中立点还是建议调拉杆的方式来进行,并且维持2-3度的右自旋尾螺距为行程中立点。
接着轻打尾舵来调左右边界,一开始打一点点,不然万一有干涉对舵机不好,在不干涉前提调整至最大边界。
到这里直升机基本设定算告一段落。
接着是飞行特性的调整,建议先用预设值再选择大小直升机级别进行试机。
新手则建议载入初学者设定再来经验微调。
1、 新手可使用初学者建议参数,可按右下角的套用。
我一开始试新手参数,舵量大一点才有反应,机体反应很稳定,很适合新手。
一般已入门可使用预设值没有问题。
在完成GPro直升机设定后,接下来就是到飞场进行最后的飞行参数设定,可依据每人手感不同来调整机体的反应。
在试机前:2、 建议把十字盘里的“十字盘摇杆Expo%”及尾舵里的“尾舵摇杆Expo%”取消为0, 改由遥控器的ELEV/AILE/RUDD 中的Expo来控制。
但建议 ELEV/AILE Expo% 不要大于20%,以免影响信号线性度。
RUDD 尾舵可由20-30%开始再视个人手感调整。
建议使用飞行风格来调“黏手度”, 用滚转速率调整滚转速度,在信号维持线性度下,体验那种稳定中带力度的手感,这部分等 下文章会说明。
这些细微的调校会让直升机来适应你的手感,当然有许多的小技巧。
在这里列出较为常用的调校法,而在进行下列调校前,直升机须已可在排除地面效应的高度能够稳定的停悬,尾舵可稳定的锁尾。
1、尾舵感度调校先进行下列动作来调整尾舵感度,可藉由调整控的尾舵锁定感度值来调整至有点追踪再回调动 3-5%,这部分会因为做的动作、直升机的动力不同而要调整,一开始可以先做A跟B即可。
或按照您个人的飞行技巧来调整,未必要全部动作都完成。
如果有做到动作B,可同时感受一下左右横移时副翼的反应速度是否合宜。
A、顺、逆、侧风停悬。
B、左右横移。
C、高速航道急弯。
D、前后滚翻。
2、自旋速度及煞车顿点调整试打左右自旋的速度,看速度上是否可以配合你的手感。
如果自旋速度太慢或太快,可调整“尾舵自旋速率”来提高或减缓自旋速度。
而在测试自旋的过程中,同时测试尾舵煞停的力道是否合乎要求,如果太硬或顿点不明显,可调整“尾舵左右自旋停止感度”来调整煞车的力道。
3、十字盘风格及滚转速率调整GPro风格如数值调越大是越“滑溜”,数值越小是反应是越扎实,你动一点它就动一点,你手停它就停。
4、集体螺距升降舵补偿停悬后保持水平,开始慢慢垂直拉升,逐次加快拉升的速度(加大集体螺距).在过程中是否有机首抬头或后退,前进现象,而没有保持水平? 如是,则调整如下方画面中左下角红框的"集体螺距升降舵补偿"值。
另外,在拉升过程中在最大正螺距拉升机体的倾斜度大于在中角度螺距拉升时,则要检测十字盘在最大正负螺距是否有保持水平。
而如果在最大集体螺距拉升时,如果有失速状况,则要检视是否转速提供足够升力,是否电池C数不足,还在上一动作在调整尾舵感度时,如有做左右横移感觉遥控器舵量要打到一定才有反应或者觉舵量打一点机体就反应过度,这时可以调整十字盘里的滚转速率。
而不要去调整遥控器的 EXPO% 。
建议遥控器的 ELEV,AILE EXPO%可以设为15%-20%去调整。
要3D的人也可以用 0% 为基准去调滚转率。
在调整滚转率过程中,同时也可以感受到机子的跟手度。
跟手度是指当你手一打十字盘时,机子多快反应你的动作。
5、十字盘在最大正负集体螺距水平调校在拉升过程中在最大正螺距拉升机体的倾斜度大于在中角度螺距拉升时,则要检测十字盘在最大正负螺距是否有保持水。
如果没有水平,则可再进直升机设定里的正负集体螺距调整页面,并把集体螺距打到最大/最小再调整下方的微调功能来配平十字盘。
但这时问题来了,在飞场调机要拆旋翼头再上十字盘配平器实在太不方便了。
幸好,彩虹飞场士权兄分享他的束带调整大法,只要利用束带跟便利贴,就可以在不拆旋翼头组状况下进行十字盘的配平了。
是不是很方便啊^^。
建议束带可顶住旋翼头下方,基准点才不会跑。
6、大螺距拉升时尾巴会右偏再回来尾舵相关参数说明:尾舵总感度:尾舵正比感度:P尾舵锁定感度:I7、十字盘感度调校为整体感度,基本上大多固定一个值,再用控来微调调整。
控的感度是整体感度, 会跟尾舵总感度一起作用。
P 主要在任何干扰施以较大的力道来回馈, 譬如在动力足够下,感度已到一定,但拉升时,尾仍会向右偏,这时应先提高正比感度(加大力道) ,再利用尾舵对集体螺I 增益愈大, 会对干扰反抗愈强烈,如遇到风吹,增益愈大,愈想把直升机维持在原来位置.这个值是儘可能调高,但过大的尾锁定感度会造成回弹。
在高速航道中急速迴转, 如果感觉机体有点变反应迟缓或桨有点失速.可调把十字盘感度提高,但如果会速度略快小幅的摇晃则应调低。
进行大集体螺距拉升动作时如果尾舵在拉升过程中或在正负螺距转换时,尾旋翼会略为右偏再回来时。