太空之吻--航天器对接装置图解
航天器的对接原理

航天器的对接原理
航天器的对接原理是指两个或多个航天器在太空中进行连接和协同工作的技术原理。
在太空中,航天器的对接需要克服多种困难,包括微重力环境、航天器间的相对运动、对接部件的精确匹配等。
目前,国际上已经开发出多种对接技术,包括机械对接、气动对接、磁力对接、电力对接等。
机械对接是最常用的对接方式,其原理是通过锁扣、卡环等机械零部件将两个航天器连接在一起。
气动对接是指利用航天器周围的气体气流控制航天器的相对运动,实现对接。
磁力对接则是利用航天器上的磁体与地面或空间站上的磁体相互作用,实现对接。
电力对接则是利用航天器上的电极和地面或空间站上的电极相互接触,实现对接。
不同的对接方式有其各自的优缺点,根据任务需求和航天器自身条件的不同,需要选择合适的对接方式。
航天器的对接技术是太空探索和空间站建设中的重要组成部分,也是探索深空的关键技术之一。
- 1 -。
神舟八号与天宫一号对接
唐荣制作
图片欣赏
详解神舟八号与天宫一号的交会对接
• 所谓“空间交会对接”,其实是轨道交会 和空间对接的总称。空间的两个航天器在 同一时刻以同样的速度到达同一个地点的 轨道控制过程及结果称作“轨道交会”; 在空间将两个航天器对接起来形成一个航 天器合体的事件称作“空间对接”。
那么,交会对接是怎样完成的?
• 通常空间交会对接涉及两个飞行器,一个是目标 飞行器,一个是追踪飞行器。空间交会与对接过 程一般是由地面发射追踪飞行器,由地面控制, 使它按比目进入与目标航天器高度基 本一致的轨道,并与目标航天器建立通信关系; 追踪飞行器调整自己与目标飞行器的相对距离和 姿态,向目标飞行器靠近;最后当两个飞行器的 距离为零时,完成对接合拢操作,结束对接过程。
以本次神舟八号的交会对接过程为例,我们来仔细看一下。
• 天宫一号目标飞行器自9月29日在酒泉卫星发射中心发射 升空后,在地面指令引导下,先后完成了多次轨道控制和 平台在轨测试工作,于10月30日进入距地面高度约343公 里的近圆形交会对接轨道。10月30日19时34分,在北京 航天飞行控制中心的精确控制下,天宫一号偏航180度, 建立倒飞姿态,这标志着天宫一号已为实施首次空间交会 对接做好了准备。截至30日19时30 分,天宫一号已在轨 运行30天22小时。根据各项遥测数据监视判断,天宫一号 飞行正常、姿态稳定、能源平衡,各项试验进展顺利,具 备执行首次交会对接的条件。
太空环境下神十七如何对接
太空环境下神十七如何对接神十七号是中国航天科技集团有限公司研制的载人飞船,旨在实现中国载人航天工程的发展目标。
在太空环境下,神十七号需要进行对接操作,确保与空间实验室等空间站设施的连接与协作。
本文将重点介绍太空环境下神十七号的对接过程及相关技术。
一、对接机构神十七号的对接机构是实现航天器间连接与脱离的关键设备,它承担着传递载荷、能量和数据的功能。
在太空环境中,对接机构需要保证稳定性、可靠性和耐用性,以确保对接的成功进行。
1. 机构结构对接机构主要由对接头、对接锁、对接传动机构和对接控制系统组成。
对接头作为连接两个航天器的纽带,其结构需要满足高强度、轻量化和各种力学特性要求。
对接锁起到安全锁定航天器的作用,保证对接状态的稳固性。
对接传动机构负责传递载荷和力矩,以及实现两个航天器间的相对运动。
对接控制系统则实现对对接过程的精密操控和控制。
2. 技术要求对接机构在太空环境下需满足多项技术要求,包括低温抗性、空间辐射防护和真空环境适应能力等。
由于太空环境极端的物理条件,对接机构的材料需要具备良好的耐腐蚀性和耐高温性,同时在真空环境下保持稳定性。
二、对接过程神十七号与空间实验室的对接过程需要严格的计划和操作,确保安全、高效地进行。
1. 对接前准备在对接前,需进行多项准备工作。
包括飞船与空间实验室的相对定位与轨道调整,确保两者轨道一致。
此外,还需要确保对接机构的正常工作状态,检查锁定装置、传动机构和控制系统的运行情况。
同时,对接过程所需的能量和数据等供给也需要提前准备。
2. 精密对接精密对接是太空环境下对接过程的关键环节。
在预定的对接区域内,通过对接机构的控制系统精确控制,实现飞船与空间实验室的对接。
在此过程中,对接头需要进行精细调整,以保证两者間毫米级别的接触。
3. 校准和锁定对接完成后,需进行校准和锁定操作。
通过校准,可以确保两个航天器之间的轨道一致。
而锁定操作则保证对接状态的牢固性和稳定性,以应对太空环境中的振动和冲击等外界因素。
天宫神八太空“激吻”定“终身”

解锁 分离 ,神八 飞船 撤离至 相距 天 宫一号 1 O米 4
处 停 泊 ,并 于 当 天 又 成 功 地 进 行 了第 二 次 交 会 对
接试 验。ห้องสมุดไป่ตู้1 1月 1 日, 7 两者 再 次分离 , 飞船 撤 离至
目标 飞行器 5公里 以外 的安 全距 离 ,两 次空 间交
会对 接试验任 务 圆满结 束。1 7日晚神 舟八号 飞船
一
号 后 面 , 者 处 于 同 一 直 线 。 1月 3 目 O时 0 , 船 抵 两 1 3: 飞
按 照 工 程 计 划 ,0 6年 前 ,我 国 要 研 制 并 发 射 空 间 实 验 21
达 距 天 宫 约 5公 里 的 对 接 入 口点 。 后 神 八 船 载 发 动 机 再 次 室。 此 具体地说 , 就是要陆续发射天宫二号、 天宫三号两个空间 实 点火 , 续 飞 向天宫。 继 1时 O 2分 , 船 对 接 机 构 缓 缓 伸 出 。 飞 在 验室。建设空间 实验室是 为在轨道上组装空间站做准备的。
到最 后锁 紧 , 用 了 8分钟 。 仅 整个 对接过程 由安 装 在 天 宫 一 号 和 神 舟 八 号 上 的舱 外 摄像 机 拍 摄 下 来 , 时传 回地 面 , 晰地呈现 在人们 眼前 。 实 清 1时 4 3分 ,载 人 航 天工 程 总 指 挥 常万 全 宣 布 : 宫一号 、 天 神舟八 号 首次 交会对 接取 得圆 满成 功。在天 宫一号 与神舟 八号对 接之后 , 组合体 由天 宫一号 负责 飞行控 制 , 神八 飞船 处于 停靠状 态 。 体长 超过 1 8米 、 重超 过 1 体 6吨 的组合 体 , 经 过 1 2天的联 袂飞行 , 两个航 天器 已于 1 1月 1 日 4
天宫之吻 演示文稿

【分手】 神八17日晚单飞“回家” 据中央电视台报道,神八将于17日晚上返回内蒙古 中部地区阿木古郎草原着陆。与之前飞船返回不同的是, 此次神八返回最大看点是出现了第四个降落伞。而以往飞 船的降落伞只有3个,这第四个降落伞被称为“牵顶伞”。 “牵顶伞”使得返回舱的回收能力具有50%以上的余量, 进一步提高了整个回收系统的可靠性。 前日20时55分,神舟八号内蒙古主着陆场区圆满完 成系统第七次、也是最后一次综合演练。结果表明,主着 陆场区参试设备状态良好,物资器材保障到位,各项工作 准备就绪,具备了执行任务的能力。
迄今为止,全世界共进行航天器交会对接活动300多次,发生 故障17次,故障率超过8% ,交会对接也被称为航天安全“鬼门 关”。对我国的航天工作者来说,任务期间所承受的巨大压力,外 人难以想象。试验成功后,他们笑着、哭着、欢呼着,尽情地释放 着压力。
北京航天飞行控制中心副总工程师周建亮:应该说这整个试验 过程是非常精彩、非常完美的。因为我是从神舟一号到包括今天的 交会对接,还有嫦娥一号、二号,每一步都是中国航天的一个进步、 一个跨越!应该说,每一次成功之后都是像今天这么激动。
【分离】 非洲上空“小别”4分钟 昨晚7时24分,北京航天飞行控制中心向“神八”和“天宫一号”组合体发 送指令。 4分钟后,“天宫一号”与“神舟八号”交会对接机构顺利解锁,组合体成 功分离,神舟八号飞船缓缓撤离至140米停泊点。据悉,组合体分离时位于非洲 上空,正好处于日照区。 接到分离指令后,对接锁系执行分离指令。对接锁解开后,通过对接面上4 个被压缩的弹簧推杆的弹簧力,将两个8吨多重的航天器轻轻推开。 上海航天技术研究院研究员陶建中介绍,“这个弹簧力并不大,只有几百牛 顿,相当于几十公斤。两个航天器被推开后,将保持一定姿态,缓缓分离,直至 准备执行第二次交会对接任务。”
航天器的对接原理

航天器的对接原理
航天器对接是指两个或多个航天器在太空中进行接触并连接起来,以实现空间站、空间探测器和太空任务等多种目的。
航天器的对接原理主要涉及两个方面:对接机构和航天器姿态控制。
对接机构是航天器对接的核心部分,它由机械机构和电气控制系统组成。
机械机构主要包括锁扣机构、导向机构、胀管机构等,用于实现航天器之间的连接和定位;电气控制系统则包括传感器、执行机构、控制器等,用于控制对接机构的动作和状态。
航天器姿态控制是对接过程中的另一个重要方面。
由于航天器在太空中没有重力的作用,对接时航天器之间的相对位置和角度需要通过姿态控制来调整和稳定。
这通常涉及到推进器、陀螺仪、加速度计和星敏感器等设备的应用,以实现航天器的姿态控制和定位。
总的来说,航天器对接的原理主要涉及到对接机构的设计和航天器的姿态控制。
通过科学合理的设计和控制,航天器可以在太空中实现精准的对接,为人类的空间探索和发展带来更多可能。
- 1 -。
图解世界载人航天发展史(二十一)
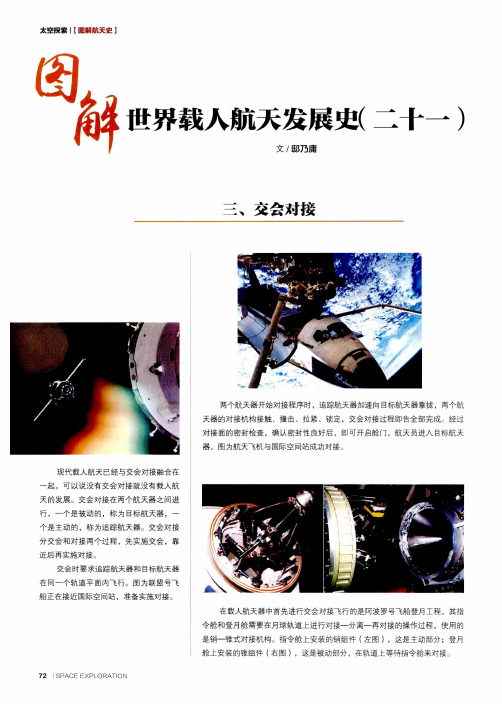
国际空 间站 上 的俄 罗斯 舱段 用 于 飞船停靠 的对接 口安装的是杆一锥式 对
接 机 构 的 锥 组 件 。 左 图 为 国 际 空 间站 内
的航天 员准备开启俄罗斯舱段内对接 口 的锥组件 ,迎接与国际空间站对接 的飞 船 中的航天员 ;右图为锥组件开 启后 , 移动到旁边固定,飞船 内的航天 员进入
【 图解航天史 】 l 太空探 索
俄 罗 斯 的联 盟 号 飞 船 和进 步 号 货 运飞 船 一 直 使 用杆 一 锥 式 对 接机 构 。 杆 组 俐 左
图中的左半部分 )安装在追踪航天器上 ,能够 由螺旋 杆转动而伸缩 ,中间还设置了 对中滑动装置 ,保证两个航天器对接过程 中不偏离 ;锥组件 ( 左图 中的右半部分 )
主 要 由 椎体 和 锁 定 装 置构 成 。
杆一锥式对接机构的对接过程 :杆组件 中的杆伸 出,杆端进入锥 内;锥面将杆
端逐渐 导入锥顶锁定 ,杆回缩 ,相互拉 紧;对接锁将对接面锁定 ,密封 ,完成对接。 右图为联盟号飞船正在靠近国际空 间站 ,可 以看到其前端 的杆 已经伸出到位,准备
来 的杆 组 件 。
SPACE EXPL ORATI ON 73 f
太空探索 l 【 图解航天史
美国航天飞机使用的就是导向器 内翻 的异体 同构周边式对接机 构 ,对接 构安装在轨道器货舱前端的气闸舱端头。 当不进行对接时, 导 向器不伸 出( 左 图 当航天飞机作 为追踪航天器 , 准备与其他航天器对接时, 三个导 向器向前伸出(
同一个轨道平面 内飞行。 图为联盟号飞 正在接近国际空间站 ,准备实施对接 。 在载人航天器 中首先进行交会对接飞 行的是阿波罗号飞船登月工程 ,其指 令舱和登月舱需要在月球轨道上进 行对 接一分离一再对接的操作过程 ,使 用的 是销一 锥式对接机构。指 令舱 上安 装的销组件 ( 左图 ),这是主动部 分;登月 舱上安装的锥组件 ( 右图 ),这是被动部分 ,在轨道上等待指令舱来对接
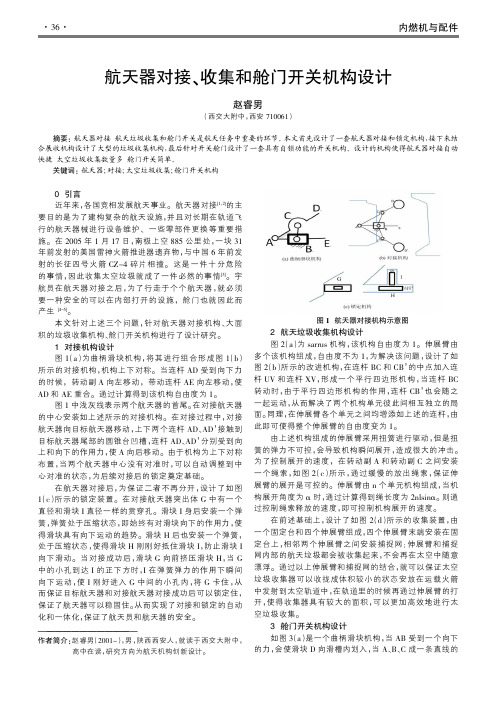
航天器连接分离机构设计的原理和常见的连接分离装置

解锁前
解锁后
十一、连接分离机构设计
2. 连接与分离装置
➢ 火工锁: 大承载、低冲击、污染小的火工装置。根据锁紧部
件的形状不同,可分为钢球锁、楔块锁、双啮合锁等。
✓
钢球锁
一般具有连接、
释放和分离三种功能。
连接能力主要与钢球
的尺寸、数量以及锁
杆、壳体的强度和硬
度有关。
十一、连接分离机构设计
3. 连接与分离机构分析
1) 连接的预紧力分析
对于部件连接分离机构而言,连接性能是一个重要的设计
要素;
在连接与分离机构产生释放动作之前,需要保证两个被连
接件之间的牢固连接关系;
依靠连接件预先对被连接的两个对接面施加相互压紧的适
当预紧力。
确定适当预紧力值非常重要!太小不足以保证运动部件
的可靠连接或压紧,太大影响连接件的强度!
k — 连接的相对刚度系数
Cb — 连接件的刚度系数
Cm — 被连接件的直接受力
构件的刚度系数
十一、连接分离机构设计
3. 连接与分离机构分析
✓
预紧力的最大值
Fp Fu fkFy
Fu — 连接件的破坏载荷值
f — 对载荷添加的安全系数
✓
预紧力的最小值
Fp f m Fm 1 k Fy
1. 连接与分离机构设计
2. 连接与分离装置
3. 连接与分离机构分析
4. 典型应用
5. 在轨服务对接与分离机构
十一、连接分离机构设计
1. 连接与分离机构设计
1) 连接机构设计
➢ 对接面的载荷条件
发射时,纵向载荷产生拉压力,横向载荷产生弯矩和剪力;
航天器对接尧收集和舱门开关机构设计
0引言近年来,各国竞相发展航天事业。
航天器对接[1,2]的主要目的是为了建构复杂的航天设施,并且对长期在轨道飞行的航天器械进行设备维护、一些零部件更换等重要措施。
在2005年1月17日,南极上空885公里处,一块31年前发射的美国雷神火箭推进器遗弃物,与中国6年前发射的长征四号火箭CZ-4碎片相撞。
这是一件十分危险的事情,因此收集太空垃圾就成了一件必然的事情[3]。
宇航员在航天器对接之后,为了行走于个个航天器,就必须要一种安全的可以在内部打开的设施,舱门也就因此而产生[4-5]。
本文针对上述三个问题,针对航天器对接机构、大面积的垃圾收集机构、舱门开关机构进行了设计研究。
1对接机构设计图1(a )为曲柄滑块机构,将其进行组合形成图1(b )所示的对接机构,机构上下对称。
当连杆AD 受到向下力的时候,转动副A 向左移动,带动连杆AE 向左移动,使AD 和AE 重合。
通过计算得到该机构自由度为1。
图1中浅灰线表示两个航天器的首尾。
在对接航天器的中心安装如上述所示的对接机构。
在对接过程中,对接航天器向目标航天器移动,上下两个连杆AD 、AD ’接触到目标航天器尾部的圆锥台凹槽,连杆AD 、AD ’分别受到向上和向下的作用力,使A 向后移动。
由于机构为上下对称布置,当两个航天器中心没有对准时,可以自动调整到中心对准的状态,为后续对接后的锁定奠定基础。
在航天器对接后,为保证二者不再分开,设计了如图1(c )所示的锁定装置。
在对接航天器突出体G 中有一个直径和滑块I 直径一样的贯穿孔。
滑块I 身后安装一个弹簧,弹簧处于压缩状态,即始终有对滑块向下的作用力,使得滑块具有向下运动的趋势。
滑块H 后也安装一个弹簧,处于压缩状态,使得滑块H 刚刚好抵住滑块I ,防止滑块I 向下滑动。
当对接成功后,滑块G 向前挤压滑块H ,当G 中的小孔到达I 的正下方时,I 在弹簧弹力的作用下瞬间向下运动,使I 刚好进入G 中间的小孔内,将G 卡住,从而保证目标航天器和对接航天器对接成功后可以锁定住,保证了航天器可以稳固住。
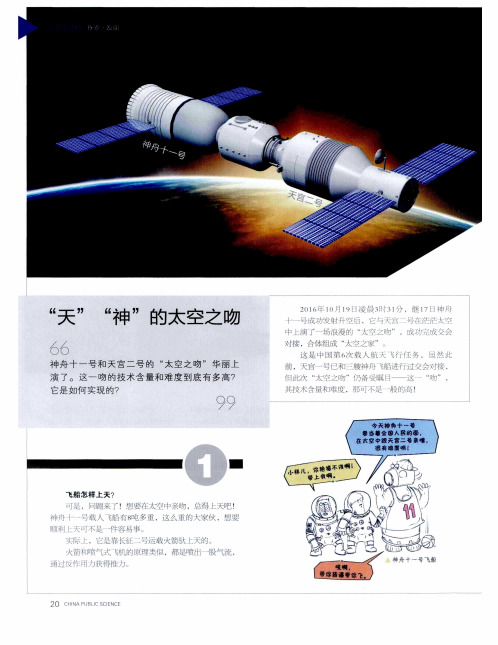
“天”“神”的太空之吻
溶
9
一 一
・
.
・
・
/ 马 上 l 扫 I _ } 了 = \
一
、 ‘
\
。
、
, .,
,
,
三
桐 一 \
… 一
一
I _ 。
住 克
0 囊 r 豫 0 尊 0
・
j ’ 上 墨 么 的 技 术 啦 题 后 ,
肘 f ‘・ ‘ 成 7 . 4 公 甲 的
船 准 确 进 入 预 定 轨道 。 我 国 载 人 航 天 工程 第
次无人 飞行试验取得 圆满成功。
神 舟 二 号 :2 0 01 年1 月1 O日1 点 ,神 舟
神舟五号 :2 0 0 3 年1 O F ] 1 5日 9 点,中国
第 一艘 载 人 飞 船 神 舟 五 号 成 功 发 射 , 中 国 首
二
、 、、
( / ,
\
22 C H I N A P U B L I C S C I E N C E
J 1 ) 筇 第1 1 排 j
探索
发现 I D l S C OV £ R Y
1 。 I 运 轨 道
一‘ 戊 对 接 ,
黪 .
神舟三号 飞船乘 长二F 火箭发射 升空并成 功
进八预定轨道 ,4 P J 1 日返 回地 面 神舟三号
是 在模 拟 载 人 状 态 下 的 第 一 次 飞行 试 验 。
神舟七号 :2 0 0 8 年9 月2 5 日,神舟七号
飞船载着航天 员翟 志刚、刘伯明 、景海鹏 飞
向太空。
神舟九号 :2 0 1 2 年6 月1 6 日,神舟九号
太空上演的浪漫之吻——航天器的交会对接技术

太空上演的浪漫之吻——航天器的交会对接技术
五轩
【期刊名称】《中国航天》
【年(卷),期】2011(000)011
【摘要】建设地球外的村庄,远比在地球上盖房子要复杂得多.它不像地面盖房子那样要用石头砖瓦来盖,也不能用钢筋水泥来浇注,而是要事先在地面上把各个房间(舱段)组装好,再用货运飞船或航天飞机送到太空,一个一个对接起来,这就需要掌握航天器交会对接技术.交会与对接是载人航天最基本的关键技术之一.交会对接对于组建空间站、大型空间设施、在太空中维修航天器和进行科学实验等都非常重要.如果没有交会对接,载人航天技术就不能发展,航天员长期在太空中生活和工作就无法进行,太阳系其它星球的探索就将受到影响.
【总页数】6页(P56-61)
【作者】五轩
【作者单位】
【正文语种】中文
【相关文献】
1.太空上演完美“之吻”,“神八”“天宫”成功对接 [J],
2.“太空之吻”有多难——专家详解“神八”与“天宫”的对接技术 [J], 丙宸
3.航天器空间交会对接技术的进展 [J], 周前祥;连顺国
4.《航天器交会对接技术》出版 [J],
5.《航天器交会对接技术》专著出版 [J], 如舟
因版权原因,仅展示原文概要,查看原文内容请购买。
太空之吻幻灯片
神舟八号成功发射并与天宫 一号成功对接新闻发布会
发言人:熊志伟
主持人:王樱润
制片人:王晓宇
口译员:付欢欢
王倩
2011年11月1日5时58分 神舟八 号发射
开始追逐天宫一号的漫漫行程
11月3日,“神八”与天宫一号进 行首次空间交会对接,一场浪漫的 “太空之吻”完美上演。
神舟八号不载人,此行肩负三项主 要任务
• 其首要任务便是,与天宫一号目标飞行器进行我国首次航天 器空间交会对接试验,突破和验证航天器自动交会对接技术。 • 第二,神舟八号飞行对自身也是一个考验,将考核改进后的 神舟飞船、改进型长征二号F运载火箭的功能和性能,以及 工程各系统间的协调性。 •
第三,交会对接后,两个航天器将组成组合体,因此验证组 合体工作模式,并开展空间科学实验,也是一项任务。
“神舟”三号飞船由中国航天科技集团公司所 属的中国空间技术研究院和上海航天技术研究 院为主研制,“长征二号F”运载火箭由中国 运载火箭技术研究院为主研制。这次发射是长 征系列运载火箭第66次飞行。自1996年 10月以来,我国运载火箭发射已经连续24 次获得成功。
这次发射是长征系列运载火箭第66次飞行,自 1996年10月以来,中国运载火箭发射已经连续24 次获得成功。“神舟三号”飞船发射成功后,中 国载人航天工程有关负责人在现场发表谈话说, 这次发射对我国全面掌握和突破载人航天技术具 有重要意义,向实现载人飞行迈出了重要的一步。
神舟七号载人航天飞船于2008年9月25日21点10分 04秒988毫秒从中国酒泉卫星发射中心载人航天发 射场用长征二号F火箭发射升空。飞船于2008年9 月28日17点37分成功着陆于中国内蒙古四子王旗主 着陆场。神舟七号飞船共计飞行2天20小时27分钟。
为了太空神奇的一“吻”——上海航天研制对接机构纪实
为了太空神奇的一“吻”——上海航天研制对接机构纪实游本凤
【期刊名称】《《军工文化》》
【年(卷),期】2012(000)002
【摘要】这是一个对中国载人航天来说最为辉煌的时刻,这是一个令全中国人民砰然心动的时刻。
2011年11月3日1点35分,天宫一号小型空间试验站与神舟八号飞船,这两个8吨多重的“大家伙”在距离地面343公里的太空轨道上,慢慢地靠近、靠近,咔嚓—下,交会对接成功。
【总页数】4页(P58-61)
【作者】游本凤
【作者单位】上海航天局
【正文语种】中文
【中图分类】V476.2
【相关文献】
1."太空之吻"缔造者王曙群:r练就"精、新、准、快"的航天工程绝技绝活 [J], 周烨
2.以精细化确保航天员生命安全——记中国航天科技集团公司八院149厂研制总装神十推进舱、对接机构分系统 [J], 罗京
3.微波雷达迢迢太空尽在掌控——中国航天科工二院25所交会对接微波雷达研制纪实 [J], 杨雯
4.它在太空促成『胜利之吻』——中国航天科工三院33所高精度加速度计组合研制侧记 [J], 唐新培
5.为托“神舟”遨太空──航天11所研制载人航天飞船火箭发动机纪实 [J], 吴忠民;杨军
因版权原因,仅展示原文概要,查看原文内容请购买。
太空舱对接原理
太空舱对接原理
太空舱对接是指将两个或多个太空舱连接起来,形成一个大型空间站或空间船。
对接的原理是通过对接机构将两个太空舱连接在一起,实现舱内空气、电力、数据等资源的共享。
对接机构主要包括对接环、对接锁和对接相关传感器等。
对接环是固定在太空舱上的一个环形结构,可以与另一个太空舱上的对接锁相连接。
对接锁则是固定在另一个太空舱上的一个锁状结构,可以通过机械手臂或舱内人员的操作与对接环相连接。
为了确保对接的准确性和安全性,对接机构还配备有多个传感器,包括温度、压力、加速度等传感器,用于监测连接过程中的状态。
在对接完成后,太空舱之间的空气、电力和数据资源可以相互共享,以满足宇航员在太空中的生活和工作需求。
同时,对接也可以实现舱内物品和人员的转移,为太空任务的执行提供了更多的灵活性和可靠性。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
太空之吻--航天器对接装置图解
赵洋发表于 2011-11-04
神舟八号已经追上了天宫一号,实现了我国航天器在太空中的首次交会对接。
除了精准的轨道控制以外,让两者能够亲密接触的对接装置才是真正的关键所在。
航天器对接装置是用来实现航天器之间对接、连接与分离的装置。
通过它,可以实现两个航天器机械、电气、液路的连接。
二者通过对接组成轨道复合体后,可实现人员、物资的转移。
目前已有的对接装置主要有“环-锥”式、“杆-锥”式、“异体同构周边”式和“抓手-碰撞锁”式4种对接装置。
[科幻插图中的非刚性对接装置]
根据使用要求,航天器对接装置可分为精确的刚性连接和在相对位移较大时的柔性连接。
在大多数情况下,特别是在载人飞行时,必须采用刚性连接,以保证两个航天器不会因相对运动发射碰撞或解锁。
“环-锥”式对接装置
[“双子星座”飞船采用的“环-锥”式对接装置结构]
“环-锥”式是最早采用的对接机构,它由内截顶圆锥和外截顶圆锥组成。
内截顶圆锥安装在一系列缓冲器上,能吸收冲击能量。
美国的“双子星座”飞船与“阿金纳”火箭;“双子星座”飞船之间都采用了这种方式。
“杆-锥”式对接装置
[“阿波罗”飞船采用的“杆-锥”式对接装置结构]
[“阿波罗”飞船指令舱头部可见“杆-锥”式对接装置结构] [苏联/俄罗斯的“杆-锥”式对接装置结构]
[“联盟TM”飞船头部可见“杆-锥”式对接装置]
“杆-锥”式对接装置由“杆”和“锥”两部分构成,前者装在追踪飞行器上,后者装在目标飞行器上。
对接时,杆插入锥内,然后锥将杆锁定,接着拉紧两个航天器,最终锁定两个对接面完成对接。
[“杆-锥”式对接装置对接过程示意图]
美国“阿波罗”登月舱与指令舱之间;苏联/俄罗斯“联盟”飞船与“礼炮”号空间站之间;“联盟TM”飞船与“和平”号空间站之间,都曾采用这种对接装置。
“环-锥”式与“杆-锥”式在本质上是相同的。
这两种对接装置虽然结构简单可靠、质量轻,但缺陷也是明显的:•两艘对接航天器上的对接装置不同,一艘是主动的杆,另一艘是被动的锥,二者不能通用。
形象地说,二者类似于螺杆和螺母的关系。
杆相当于“螺杆”、锥相当于“螺母”。
带有“杆”的航天器只能主动去“追”带有“锥”的航天器并与之对接,反过来则不行。
所以不利于实施太空营救。
•对接杆和锥都位于对接口中央,占据了部分通道空间,影响了航天员的进出。
“异体同构周边”式对接装置
[苏联“联盟-19”飞船与美国“阿波罗-18”飞船对接使用的装置]
[“联盟-19”与“阿波罗-18”成员组在飞船模型前合影,对接装置清晰可见。
]
为使航天员和货物能够直接通过对接通道实现转移,苏联和美国在1975年共同研制出异体同构周边式对接装置。
当两个航天器接近时,三块导向瓣分别插入对方的导向瓣空隙处。
对接框上的锁紧机构使两个航天器保持刚性连接。
“异体同构周边”式对接装置有效克服了“杆-锥”式机构的缺点,这是因为:
•对接装置是异体同构的(也就是“雌雄同体”,又可以做螺杆、又可以做螺母),航天器既可作主动方,也能作被动方,这一点对实施太空救援尤其重要;
•对接装置是沿周边分布的,所有定向和动力部件都安装于舱口的四周,从而保证对接装置的中央成为来往通道空间。
[航天飞机与“和平”号空间站、航天飞机与国际空间站等对接采用的装置]
随着航天器的尺寸和质量不断增加,苏联又研制出可供100吨以上航天器对接使用的异体同构周边式对接装置。
对接通道直径增大后,两个航天器连接刚度也得到提高。
航天飞机与“和平”号空间站、航天飞机与国际空间站的对接都采用了这种装置。
[俄罗斯APAS-89对接装置]
[中国的对接装置]
神舟八号和天宫一号所采用的对接装置,也是“异体同构周边”式对接装置。
有网友分析称,中国可能向俄罗斯借鉴了APAS-89对接装置。
这种装置原本打算用在“暴风雪”号航天飞机与“和平号”空间站的对接上。
“抓手-碰撞锁”式对接装置
[欧洲空间局的十字形对接装置]
欧洲空间局研制的十字形对接装置与日本研制的三点式对接装置均属于“抓手-碰撞锁”式。
二者只是布局上的差别。
十字形对接装置是欧洲空间局研制的非密封、无通道的对接装置,仅用于无人航天器之间的对接。
因其撞锁和连接器呈十字交叉分布而得名。
日本的三点式对接装置则在周边布置三个抓手与撞锁,也只适用于无人航天器的对接。
国际通用标准
[新近在国际空间站上使用的“国际低冲击对接装置”(iLIDS)结构图]
鉴于上述对接装置结构各异、标准不一,可能对未来的国际太空合作形成阻碍。
美国国家航空航天局(NASA)宣布,国际空间站多边协调委员会批准了一项太空对接标准,为未来的载人飞船、无人飞船、以及低轨道和深空探测任务飞行器,提供一种通用的对接规范。
该委员会成员包括了NASA、俄罗斯联邦航天局、日本宇宙航空研究开发机构辅助的日本文部科学省、欧洲航天局和加拿大航天局。
其目标是创建一个标准的接口,让两种不同的飞行器在太空中对接,减轻新兴国际合作空间任务开发进程中的难度,使得各国之间的太空救援成为可能。
此刻,神舟八号已经与天宫一号成功实现了对接,由于采用了“异体同构周边”式对接装置,神舟八号与天宫一号亲密接触的“部位”在构造上是一样的。
从这个角度来看,把这次交会对接称为太空之吻,确实相当“科学”呀。
参考资料:
•巡天神舟——揭秘载人航天器,中国宇航出版社,2011.6
•载人飞船工程概论,国防工业出版社,2000.8
•
•/thread-1159078-1-1.html
本文已发表于果壳网创意科技主题站《神舟八号如何与天宫一号亲密接触》。