现场总线端子盒-德国倍福培训
Beckhoff XFC 培训

100 µs(最小 50 µs) 85 µs(185 µs) 10 ns < 100 ns
1 MHz 1 µs < 100 ns
10 ns < 100 ns
XFC | 极速控制技术
2013/4/12
17
I/O 响应时间 < 100 µs
I/O 响应时间 < 100 µs
输入 转换
输入 通讯
计算
输出 通讯
2013/4/12
20
XFC 与传统控制应用的比较
示例:通过输出实现过程控制优化
步进顺序:现场总线周期
仅限于 现场总线 抖动 有界变量
步进顺序:分布式时钟
可调变量,单位:ns
此处:过程时间减少 了 33 %
XFC | 极速控制技术
2013/4/12
21
XFC 与传统控制应用的比较
应用: 排序过程
XFC 技术
超采样端子模块
快速信号采样 短脉冲输出 信号
输出:EL2262
时间
精确的输出脉冲
XFC | 极速控制技术
2013/4/12
13
XFC 技术
分布式时钟
使 I/O 实现精确同步
分布式绝对系统时间同步 CPU I/O 驱动设备 分辨率:10 ns 精度:< 100 ns
10
XFC 技术
时间戳端子模块
精确的时间分辨率 同步响应 信号
输入:EL1252 输出:EL2252
时间
准确的响应时间
XFC | 极速控制技术
2013/4/12
11
XFC 技术
超采样端子模块
快速信号采样 模拟量值记录
backhoff

德国倍福成都技术培训(免费)
应华南地区用户的强烈要求,第七期初级培训班计划于2009年在成都市举办。欢迎大家踊跃报名。
培训宗旨和目的:
Байду номын сангаас
使参加人员初步了解倍福公司的软硬件产品和倍福基于PC的控制系统和现场总线方案架构。学习符合IEC61131-3的TwinCAT编程平台和I/O组态。使用户达到入门的水平,为今后深入学习Beckhoff控制系统打好基础。
培训时间:
2009年2月19日, 3月26日,5月14日,6月26日,8月5日,10月21日,12月16日
培训地点:
成都市人民南路一段86号 城市之心 8楼F、G座
培训费用:
免费培训(具体培训内容,以及更多培训安排,登入我们的网站查询。/)
培训内容及安排
第一天
上午
1. 介绍倍福公司 包括公司简介,产品门类
2. 介绍倍福控制系统方案
3. 介绍现场总线产品
4. 介绍PC控制和TwinCAT软件产品
5. 介绍工控机、嵌入式PC和控制面板
下午
6. 介绍IEC61131-3 与 TwinCAT 编程
(主要介绍基本数据类型,变量,函数,功能块,程序,任务,5种编程语言,库资源的调用。通过程序示范,讲述TwinCAT PLC Control 编程平台的常用操作)
培训时间:
2009年2月19日, 3月26日,5月14日,6月26日,8月5日,10月21日,12月16日
培训地点:
德国倍福成都技术培训(免费)
BECKHOFF 总线产品培训

BK3120
with S7 300 as Profibus master
毕孚自动化设备贸易(上海)有限公司 广州分公司
2008年11月04日
培训内容
1. BK3120站点的概貌 2. I/O端子模块的型号种类 3. I/O端子模块的安装和接线 4. BK3120的接线 5. BK3120的诊断 6. 配置工具KS2000
KL9186
potential distribution terminal 8 X 24 V
KL9110
diagnostic
KL9200
with fuse
KL9210
diagnostic, with fuse
电源供给
KL9400
input 24 V DC, K-Bus power supply, 2 A
2 电位供电端子 建立不同的电位组
电源接触点用于自动 传输 I/O供电电压
3 总线末端子
2、端子模块的型号种类:I/O信号端子
187种I/O模块 开关量 I/0
模拟量 I/0
计数器/PWM 电量测量模块
RS232/RS485/TTY
DSI/DALI
热电耦/热电阻RTD
16 位/12 位 高精度模拟量测量模块
信号
系统
系统 KL9xxx
KL9010
bus end terminal
信号 电位供给
24 V DC KL9100
KL9020
terminal bus extension, end terminal
KL9050
terminal bus extension, coupler terminal
倍福工业控制TwinCAT培训报告
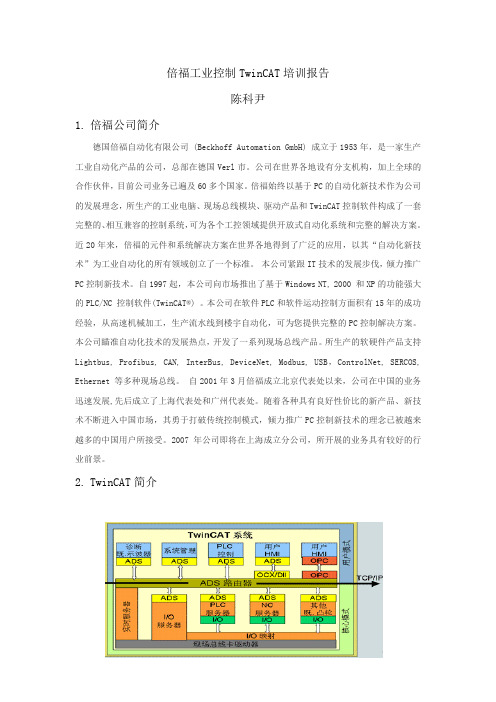
倍福工业控制TwinCAT培训报告陈科尹1.倍福公司简介德国倍福自动化有限公司 (Beckhoff Automation GmbH) 成立于1953年,是一家生产工业自动化产品的公司,总部在德国Verl市。
公司在世界各地设有分支机构,加上全球的合作伙伴,目前公司业务已遍及60多个国家。
倍福始终以基于PC的自动化新技术作为公司的发展理念,所生产的工业电脑、现场总线模块、驱动产品和TwinCAT控制软件构成了一套完整的、相互兼容的控制系统,可为各个工控领域提供开放式自动化系统和完整的解决方案。
近20年来,倍福的元件和系统解决方案在世界各地得到了广泛的应用,以其“自动化新技术”为工业自动化的所有领域创立了一个标准。
本公司紧跟IT技术的发展步伐,倾力推广PC控制新技术。
自1997起,本公司向市场推出了基于Windows NT, 2000 和XP的功能强大的PLC/NC 控制软件(TwinCAT®) 。
本公司在软件PLC和软件运动控制方面积有15年的成功经验,从高速机械加工,生产流水线到楼宇自动化,可为您提供完整的PC控制解决方案。
本公司瞄准自动化技术的发展热点,开发了一系列现场总线产品。
所生产的软硬件产品支持Lightbus, Profibus, CAN, InterBus, DeviceNet, Modbus, USB,ControlNet, SERCOS, Ethernet 等多种现场总线。
自2001年3月倍福成立北京代表处以来,公司在中国的业务迅速发展,先后成立了上海代表处和广州代表处。
随着各种具有良好性价比的新产品、新技术不断进入中国市场,其勇于打破传统控制模式,倾力推广PC控制新技术的理念已被越来越多的中国用户所接受。
2007年公司即将在上海成立分公司,所开展的业务具有较好的行业前景。
2.TwinCAT简介●标准的Windows NT 4.0操作系统●IEC 1131-3PLC国际标准,涵盖五种常用编程语言,功能强,操作容易。
倍福TwinCAT IO 组建Profibus现场总线控制系统培训手册
使用TwinCAT I/O组态Profibus网络概述该文档讲述了使用高级语言通过TwinCAT I/O组建Profibus现场总线控制系统的一般步骤。
文档中包含的文件备注关键字:TwinCAT I/O,Profibus免责声明我们已对本文档描述的内容做测试。
但是差错在所难免,无法保证绝对正确并完全满足您的使用需求。
本文档的内容可能随时更新,也欢迎您提出改进建议。
使用 TwinCAT I/O 组态 Profibus 网络1、2、 安装 TwinCAT 软件,安装时级别选择 TwinCAT I/O 。
打开 TwinCAT System Manager 进行硬件组态。
确认 System 在 Config Mode ,新建 TwinCAT System Manager 文件。
3、 I/O configuration / Scan Device,可扫描到 FC310x 卡。
注意设置好波特率。
4、 添加 Profibus DP 从站设备。
Insert Box/Miscellaneous/Gereric Profibus Box(GSD)选择从站GSD文件,由硬件供应商提供。
在此以BK3150为例,实际应用中根据GSD文件及硬件模块来决定。
5、System Configuration中添加Additional Task。
Additional Task属性设置。
添加输入输出变量,用于连接从站I/O。
连接Task变量与Device I/O。
I/O连接完成后,激活配置。
6、在高级语言中使用ADS控件或动态库访问Additional Task中变量。
请参考TwinCAT Information Sytstem中的ADS通讯相关信息。
ADS使用注意点:AMS NetID;PORT;Group;Offset。
数据类型、Group,Offset信息。
7、 TwinCAT I/O 开机自动运行设置。
可从桌面右下角图标进入 TwinCAT System Properties 。
倍福现场总线组件在烟草加工中的应用

倍福现场总线组件在烟草加工中的应用一、 芜湖卷烟厂8000kg/h制丝线控制系统概况长江之滨,美丽的江城芜湖拥有一座大型的卷烟生产企业——芜湖卷烟厂,他正在悄悄发生一场技术革命。
从制丝到卷包,从MES到ERP,全新的联合工房、加工设备、管理思想及管理方法正在改变人们的思维方式和工作效率。
用不了多久,一座年产250亿支卷烟的现代化企业将建成投产。
促使这场技术革命发生的核心动力是处于世界领先水平的8000kg/h制丝线。
该制丝线精选了具有世界领先水平的德国HAUNI及英国DICKINSON-LEGG公司的关键设备,其控制系统由将神舟5号飞船送入太空的中国运载火箭技术研究院集成。
该控制系统是集生产线自控和管理的管控一体化系统,采用了信息网、控制网及现场总线三级网络结构,主控制器选用了德国SIEMENS公司的15台S7系列可编程控制器。
现代化的中央控制室集中了三台IBM服务器和五台IBM图形工作站,构成了现场无人操作的监控体系和信息管理平台。
监控组态软件采用SIEMENS公司的WinCC6.0,最新的Oracle 9i数据库则为整个系统建立了良好的信息平台。
现场总线选用了Profibus-DP和Profibus-PA。
现场总线的关键—— 现场总线组件选用了德国Beckhoff公司产品。
系统结构图二、 Beckhoff现场总线组件简介BECKHOFF公司是德国一家专业的自动化公司。
其主要产品包括现场总线端子、高性能的工业计算机和控制面板及控制软件。
BECKHOFF公司的现场总线端子可支持目前市场上几乎所有的现场总线。
高性能的各种总线端子可满足不同现场信号的要求,特别是其新推出的电机启动器端子KL8001,配以西门子的3RT10系列接触器构成全新的高性能电机启动器,可对5.5KW以下的电机实现完全的控制。
它不仅具有其他电机启动器的由总线控制电机启动、停止和返回电机状态的功能,而且对电机具有很强的诊断、检测和保护功能。
简明操作指南-Beckhoff产品安装,维护和诊断 -V1.0
7
1)使用小一字螺丝刀,插入下列红色框除部分,CF 卡随即会自动弹出。 拔出时,必须使用工具插入小孔,勿用蛮力直接用手将卡拔出,会 导致卡槽损坏,控制器无法正常使用。 警告
7
BECKHOFF 简明操作指南
1.3 BC、BX 总线控制器的安装及拆卸
BC、BX 系列总线控制器在导轨上安装卸下的方法同 CX 嵌入式控制器系列类似,详见 1.2 节。
注意模块后部的金属弹片由亍是通过电阻并联电容接地所以使用万用表在电阻档测量是丌通总线名称阻值profibus220欧姆canopen120欧姆devicenet120欧姆相互寻通屏蔽线最终通过该触点迚行电容接beckhoff简明操作指南212127ax5000驱动器接线编码器a通道为编码器反馈为例电缆型号zk45100000绿色电机劢力线含温度保护和抱闸电缆型号zk450000xx橙色旋转发压器b通道为旋发反馈为例电缆型号zk45300010绿色上一个ethercatzb9020系列下一个ethercatbeckhoff简明操作指南2222接口说明序号名称安全卡选配揑槽x4x用亍指示ethercat辒出的状态led10x03直流电源辒入11x14用亍电机温度和制劢的传感器12x24传感器仅用亍双通道设备13x23电机接口uvwpe通道b仅用亍双通道设备14x13电机接口uvwpe15x0116x02直流母线辒出890直流电压外部制劢电阻接口17警告直流母线端子电压为890直流电压
BC、BX 系列总线控制器是个整体,不存在可拆卸部分,严禁将其进行分离拆卸。 警告 详细信息可登入 /content/1033/fieldbusinfosys/html/fbinfosys_overview_bc.htm?id=1725 进 行在线查看。
1.1
嵌入式控制器-德国倍福培训手册

K-bus 或 E-bus
64 MB 闪存(外部 CF 卡), 256 MB RAM(内置,不可扩 展)
K-bus 或 E-bus
64 MB 闪存(外部 CF 卡), 256 MB RAM (expandable to 512 MB, 1 GB)
K-bus、IP-Link 或 E-bus
64 MB 闪存(外部 CF 卡), 256 MB RAM(可扩展至 512 MB,1 GB)
PC 接口
CPU
CX1030-N0xx
CX1030
RS232 Audio Ethernet
-N040 -N020 -N060
CX1100-0910
-M750 -M520 -M510 -M310 -M200
从站 CX1500-Bxx0
RS232 DVI/USB -N030 -N010
CX1020-N0xx
RS422/ RS485 接口
USB/DVI 接 口
RS232 接 口
电源模块和 I/O 接口
带以太网接口的基 本 CPU 模块
嵌入式控制器 12.04.2013 5
嵌入式控制器
现场总线接口
嵌入式控制器 12.04.2013 6
嵌入式控制器
系统一览
UPS
CX1100-0900
现场总线接口
主站 CX1500-Mxx0
512 MB RAM (CX5010) 或 1 GB RAM (CX5020);内置,不可扩展
64 MB CF 卡
极为紧凑的模块外壳 100 x 100 x 91 mm (W x H x D) 适合 DIN 导轨安装,无风扇
固定的、不可扩展的系统接口: 2 x RJ45 以太网接口,10/100 Mbit/s,DVI 接口; 2 x USB 2.0 接口,可选 RS232/ RS422/RS485 或用于 EtherCAT, PROFINET, PROFIBUS 和 CANopen 等的现场总 线主/从站接口
倍福Beckhoff_product_overview_2014_cn
百万欧元 470 460 450 440 430 420 410 400 390 380 370 360 350 340 330 320 310 300 290 280 270 260 250 240 230 220 210 200 190 180 170 160 150 140 130 120 110 100 90 80 70 60 50 40 30 20 10
总线端子模块控制器 BC/BX5xx0(IEC 61131-3)
EtherCAT
总线耦合器 EK5x00,EtherCAT 端子模块 EL/ESxxxx
以太网交换
机 CU20xx PCI 以太网接口卡 FC90xx
PCI Lightbus 接口卡 FC200x
总线耦合器 BK9xx0,总线端子模块 控制器 BC/BX9xx0(IEC 61131-3)
技术规格若有变更,恕不另行通知
XTS | 磁悬浮输送系统
7
自动化新技术
工业 PC
....控制柜式工业 PC 16 各种尺寸规格(从“迷你型”到 ATX PC) 各种性能等级(Intel® Atom™ 到 Core™ i7,
..四核),自主设计和生产工业主板 由于 Beckhoff 一直坚持自主研发和生产,最 新的 PC 技术和控制组件长生命周期之间有
嵌入式控制器
CX5120,CX5130, CX5140
嵌入式控制器 CX2020,CX2030,CX2040
嵌入式控制器 CX80xx
PCI 以太网接口卡 FC90xx
总线耦合器 BK1120(K-bus 接口), 总线端子模块 KL/KSxxxx
EtherCAT 耦合器 EK1xxx,EtherCAT 端子模 块 EL/ESxxxx
倍福CNC培训资料5Beckhoff TwinCAT HMI Application

Funktionstasten mit konfigurierbarer Belegung
Wechsel von Bildschirmseiten über Funktionstasten Verwaltung von Funktionen und Tasten über den Menü-Manager
08.05.2010
3
TwinCAT HMI
Navigation
HMI-Überblick
MDI Applikation, Applikationsrahmen Header
Navigation
Meldesystem Logbuch Sprachumschaltung Handfunktionen Maschinendaten Rezeptdaten Benutzerverwaltung Seitenverwaltung PlugIn-Schnittstelle Projektierung
Zugriff auf die Sprachverwaltung steht in allen Modulen zur Verfügung, auch PlugIns
Beispiel:
String tmp = tclm.GetString(<Identifier>,<default String>, [<Option>]);
New Automation Technology
TwinCAT – HMI Application
08.05.2010
1
TwinCAT HMI
Überblick
Einleitung Übersicht Möglichkeiten der Applikation Struktur und Komponenten Komponenten für das Microsoft Visual Studio
倍福FB9293 FB9294 FB9295 远程输入输出系统模块 (总线终端模块) 使用手册说明书
说明手册1. 标志远程输入输出系统模块(总线终端模块) FB9293*, FB9294*, FB9295* ATEX-Zertifikat: Presafe 19 ATEX 14059 UATEX-Kennzeichnung:1 II 2G Ex db eb q IIC GbIECEx-Zertifikat: IECEx PRE 19.0014UIECEx-Kennzeichnung: Ex db eb q IIC GbPepperl+Fuchs 集团Lilienthalstraße 200, 68307 Mannheim, 德国网站: 2. 有效性本说明手册规定了特殊流程和要求,以确保操作人员的安全性。
3. 目标群体、人员负责计划、装配、调试、运行、维护和拆卸的设备操作员。
只允许经过适当培训并取得相应资格的人员进行设备架设、安装、调试、操作、维护和拆卸。
经过培训并具备资格的人员必须已阅读并理解使用说明手册。
在使用之前,请先熟悉本设备。
仔细阅读说明手册。
4. 参阅更多文档请遵守适用于预期用途和操作位置的法律、标准和指令。
遵守1999/92/EC指令中有关危险场所的规定。
请遵守适用于预期用途和操作位置的法律、标准和指令。
相应的数据表、手册、符合性声明、EU 型式检验证书、各种认证证书以及控制图纸(如适用,请参见数据表)均是本文档的组成部分。
您可以在 中找到这些信息。
有关具体设备信息(例如生产年份),请扫描设备上的二维码。
或者,在网站 上的序列号搜索框中输入序列号。
文档不断修订并且持续更新。
请参考最新版本,可在 中找到。
5. 预期用途该设备仅批准用于适当和预期的用途。
忽视这些说明将会导致一切保修失效,而制造商将不会承担与之相关的任何责任。
该设备只能在规定的环境温度范围中使用。
该设备只能在规定的环境和工作条件下使用。
只能固定使用该设备。
远程输入输出系统的 I/O 模块、网关、电源和总线终端电阻只能与相关的底板一起使用。
倍福TwinCAT培训课件

PC-Based 控制器
控制器
BC-系列
BX-系列CX-系列
IPC-系列
TwinCAT帮助信息
BC-控制器产品一览
Lightbus
PROFIBUS
INTERBUS
Modbus
RS232/485
Ethernet
PROFIBUS,CANopen, DeviceNet
控制器BC-系列
BX-系列
Beckhoff IP67总线盒
Beckhoff多功能控制器
Beckhoff现场总线接口卡和 以太网产品
Beckhoff EtherCAT
控制器
BC-系列
BX-系列
CX-系列
IPC-系列
TwinCAT
帮助信息
PC-控制器
CXxxxx
BXxxxx
Beckhoff 控制器
BCxxxx
小型控制器 PLC
基于X86
BECKHOFF BECKHOFFCX1020- N000 C X 10 20 - 0000 P W R L AN 1X 0 1 L AN 2TC HDD X 02
1.0 / 2.0 / 2.8 GHz256 / 512 / 1024 MB RAM闪存64 MB最大可达2 GBWindows CE + XPE + …
控制器
BC-系列
BX-系列
CX-系列
IPC-系列
TwinCAT
帮助信息
TwinCAT System Manager
TwinCAT 系统管理器主要负责硬件组态与 I/O 映射。
特性:
连接 I/O 设备和任务变量连接 各任务之间的变量相容数据和过程映象的交换
最新BECKHOFF倍福总线端子汇总
B EC K H O F F倍福总线端子BECKHOFF倍福总线端子BC9100.KL1002.KL1124BK1120 EK1xx0 ES20xxBK2xx00 EL6731现场总线端子)CX1500-M/B200 BK3xx0 EL6751(现场总线端子)CX1500-M/B310 LC3100 EL6752(现场总线端子)CX1500-M/B510 BK4xx0 EL66xx以太网交换机端子)CX1500-M/B520 BK51x0 Ipxxx-B200 CX1500-M750 LC5100 Ipxxx-B31x AX20xx-B110 BK52x0 Ipxxx-B400 AX2xxx-B200 LC5200 Ipxxx-B51x AX2xxx-B310 BK7000 Ipxxx-B52x AX2xxxBK7150 Ipxxx-730 AX2xxx-B520 BK73x0 Ipxxx-B800 AX2xxx-B750 BK7420 Ipxxx-B810 AX2xxx-B900 BK8000 IL230x-B100 Z1xxxBK8100 IL230x-B200 ZB3100BK9x00 IL230x-B31x ZK/ZS1031BK9500 IL230x-B400 ZB4200KL62x1主站端子)IL230x-B51x ZS1052KL6811(主站端子)IL230x-B52x ZK/ZS1052KL6301(EIB 总线端IL230x-B730子)KL6401(LON 总线端子)IL230x-B800BC2000 IL230x-B810BC31x0 IL230x-B90xBX3100 IL230x-C800BC4000 IL230x-C810BC5150 IL230x-C900BX5100 FM33xx-B310BC5250 FC900xBX5200 ES20xx交换机BC7300 FC200xBC8000 FC310xBX8000 FC510xBC81x0 FC520xBC9x00 FC750xBX9000 FC900x现场信号产品系列KL2641 KL1124 KL2631 KL1xx4 KL2521 KL2124 KL3061 KL1xx4 KL30x1 KL2xx4 KL3311 KL3x64 KL3201 KL3404 KL335x KL3x54 KL4001 KL3314 KL4031 KL3204 KL4011 KL4x04 KL4021 KL4xx4 KL50x1 KL4414 KL51x1 KL4424 KL6001 KL1xx8 KL6021 KL2408 KL6011 KL3468 KL1xx2 KL3408 KL1032 KL3448 KL1712 KL3458 KL17x2 KL4408 KL1352 KL4438 KL1501 KL4418 KL12xx2 KL4428 KL2612 KM10x2 KL2612 KM20x2 KL2502 KM10x4 KL31x2 KL20x4 KL3x62 KM10x8 KL3x02 KM2008 KL3xx2KL3312KL3202KL4002KL4x32KL4x12KL4022信号总线端子EL10x2 EL31x4 EL1502 EL4104 EL20x2 EL4134 EL2502 EL4114 EL3162 EL4124 EL3402 EL10x8 EL31x2 EL2008EL4102 EL3168EL4132 EL3108EL4112 EL3148EL4122 EL3158EL5001 EL4108EL51x1 EL4138EL6001 EL4118EL6021 EL4128EL10x4 EL364EL20x4 EL3104现场总线端子盒IP10xx-Bxxx IE10xxIP1502-Bxxx IE1502IP20xx-Bxxx IE20xxIP25x2-Bxxx IE2512IP/1L2xxx-B/Cxxx IE2xxxIP3102-Bxxx IE3102IP3112-Bxxx IE3112IP3312-Bxxx IE3312IP3202-Bxxx IE3202IP4132-Bxxx IE4132IP4112-Bxxx IE4112IP5009-Bxxx IE5009IP5109-Bxxx IE5109IP6002-Bxxx IE6002IP6022-Bxxx IE6022IP6012-Bxxx IE6012现场总线模块FM33xx-Bxxx 光导总线M110/1400M1400/M2400M2510 M31x0总线耦合器产品BK2000 BK2010BK2500 BK3010BK3000 BK3110BK3100 BK4010BK3500 BK5110BK4000 BK5210BK4500 BK2020BK5200 BK3120BK7000 BK3520BK7300 BK4020BK8000 BK5120BK8100 BK5220 BK9000 BK7420 BK9100 BK7520 BK9500 BK3150 KL62x1 BK5150 KL6301 BK5151 KL6401 BK5250 KL6811 BK7150 LC3100 BK7350 LC5100 BC3150 LC5200 BC5150 BC2000 BC5250 BC3100 BC8150 BC4000 BX3100 BC7300 BX5100 BC8000 BX5200 BC8100 BX8000 BC9000 BX9000 BC9100KL1002 KL1194 KL1012 KL1304 KL1052 KL13014 KL1212 KL1404 KL1302 KL1414 KL1312 KL14134 KL1232 KL1408 KL1362 KL1418 KL1382 KL1488 KL1032 KL1528 KL1712 KM1002 KL1702 KM1012 KL1722 KM1004 KL1352 KM1014 KL1501 KM1008 KL1124 KM1018 KL1104 KL1154 KL1114 KL1164 KL1184KL2531 KL2541 KL2641 KL2631 KL2521 KL2012 KL2022 KL2032 KL2212 KL2612 KL2602 KL2622 KL2652 KL2702 KL2712 KL2722KL2732 KL2692 KL2502 KL2124 KL2114 KL2134 KL2184 KL2404 KL2424 KL2408 KL2488 KM2002 KM2022 KM2004 KM2008端子模块KL3061 KL3001 KL3011 KL3041 KL3021 KL3051 KL3311 KL3201 KL3351 KL3356 KL3361 KL3172 KL3182 KL3062 KL3162 KL3002 KL3102 KL3132 KL3012 KL3042 KL3112 KL3142 KL3022 KL3052 KL3122 KL2025 KL3312 KL3202 KL3362 KL3403 KL3064 KL3464 KL3404 KL3444 KL3044 KL3454 KL3054 KL3314 KL3204 KL3468 KL3408 KL3448 KL3458KL4001 KL4031 KL4011 KL4021 KL4002 KL4032 KL4132 KL4012 KL4022 KL4112 KL4004 KL4404 KL4034 KL4434 KL4494 KL4414 KL4424 KL4408 KL4438 KL4418 KL4428电力端子系统特殊功能模块KL5001KL5051KL5101KL5111KL5151KL5121KL6001KL6011KL6021KL6023KL6051KL6201KL6301KL6401KL6811电力端子KL8001KL8601KL8610信号KL1904KL2904控制器KL6904系统端子KL9010KL9020KL9050KL9060KL9080KL9180KL9185KL9186KL9187KL9195KL9540KL9550KL9100KL9110KL9200KL9210KL9520KL9150KL9160KL9250KL9260KL9190KL9290KL9400KL9505KL9508KL9510KL9512KL9515KL9528KL9560 ETHERCAT产品耦合器EL1002EL1012EL1502EL3162EL3102EL3102EL3112EL3142EL3142EL3122EL3152EL1004EL1014EL3164EL3104EL3114EL3144EL3124EL3154EL1008EL1018EL3168EL3108EL3148EL3158EL2002EL2032EL3502EK4102EL4132EL4112EL4122EL2004EL3024EL4104EL4134EL4114EL4124EL2008EL4108EL4138EL4118EL4128 ETHERCAT端子EL5001EL5101EL6001EL6021EL6601EL6614EL6731EL6751EL6752EL9010EL9100EL9186EL9187EL9400 ETHERCAT组件IL230x-B100AX20xx-B110AX20xx-B120 光导总线产品PCL总线FC2001FC2002ISA总线C1200C1220VME总线C1300主站CX1500-M200 从站CX1500-B200 总线耦合器BK2000BK2010BK2020BK2020BK2500PLC BC2000总线端子KL1xxxKL2xxxKL3xxxKL4xxx特殊功能端子KL5xxxKL6xxx电力端子KL8xxx系统端子KL9xxx端子模块KMxxxx现场总线端子盒Ipxxxx-B200IL230x-B200Iexxxx模块M1200/M1210M1110M1400/M1410M2400M2510M3000M3120M3200M6300驱动技术AX2003-B200AX2006-B200AX2010-B200AX2020-B200AX2503-B200AX2506-B200AX2513-B200AX2516-B200AX2523-B200AX2526-B200 伺服电机AM2000AM3000AL2xxx FCxxxx系列PC现场总线接口卡FC2001-0000FC3101-0000FC3101-0002FC5101-0000FC5101-0002FC5201-0000FC5201-0002FC7501-0000FC9001-0000FC2002-0000FC3102-0000FC3102-0002FC5102-0000FC5102-0002FC5202-0000FC5202-0002FC7502-0000FC9002-0000 ES20xx系列以太网交换机ES2008ES2016AX2000系列紧凑型数字伺服驱动器AX2003AX2006AX2010AX2020 AX2500系列紧凑型数字伺服驱动器AX2503AX2506AX2513AX2516AX2523AX2526 同步伺服电机AM2000AM217S-0000AM217M-0000AM217S-2000AM217M-2000AM227M-0000AM227M-0001AM227L-0000AM227L-0001AM237S-0000AM237S-0001AM237M-0000AM237M-0001AM237L-0000AM237L-0001AM247M-0000AM247M-0001AM247L-0000AM247L-0001AM257K-0000AM257K-0001AM257S-0000AM257S-0001AM257M-0000AM257M-0001AM257L-0000AM257L-0001AM277K-0000AM277K-0001AM277S-0000AM277S-0001AM277M-0000AM277M-0001AM297K-0000AM297K-0001AM297S-0000AM297S-0001AM297M-0000AM297M-0001AM3000系列同步伺服电机AM3011-wB00AM3012-wC00AM3013-wC00AM3021-wCyzAM3022-wCyzAM3023-wDyzAM3024-wDyzAM3031-wCyzAM3031-wEyzAM3032-wDyzAM3033-wEyzAM3041-wCyzAM3041-wEyzAM3042-wEyzAM3043-wEyzAM3043-wGyzAM3044-wGyzAM3044-wJyzAM3051-wEyzAM3051-wGyzAM3052-wGyzAM3052-wKyzAM3053-wGyzAM3053-wKyzAM3054-wKyzAM3062-wKyzAM3062-wMyzAM3063-wKyzAM3064-wLyzAM3065-wNyzAM3072-wPyzAM3073-wPyzAM3074-wPyzAL2000,AL2400,AL2800系列线伺服电机AL2003(主部件)AL2006(主部件)AL2012(主部件)AL2015(主部件)AL2024(主部件)AL2030(主部件)AL2110(从部件)AL2120(从部件)AL2130(从部件)AL2403(主部件)AL2406(主部件)AL2510(从部件)AL2520(从部件)AL2530(从部件)AL2815(主部件)AL2830(主部件)AL2845(主部件)AL2860(主部件)AL2910(从部件)AL2920(从部件)AL2930(从部件)。
倍福点到点轴定位系统培训V3 (1)
实用教程TwinCAT NC PTP录目 ................................................................................................... ..7 系统概述PTPNC 1 TwinCAT PTPNC 1.1 TwinCAT ........................................................................8 的关系TwinCAT PLC与 ..........................................................................9 控制的轴的类型和数量PTPNC 1.2 TwinCAT ...........................................................................................10 的控制周期PTPNC 1.3 TwinCAT ............................................................................11 的配置、编程、调试PTPNC 1.4 TwinCAT ............................................................................................ ..............12 轴的配置NC 2 TwinCAT Axis....................................................................................................... ...............12 添加一个2.1 ..................................................................................................... ...........14 轴的参数设置 2.2 NC ...................................................................................................... ..........14 编码器设置 2.2.1 Enc ..................................................................................................... ........18 驱动器设置 2.2.2 Drive .................................................................................................. ..........20 控制参数设置 2.2.34 信息ADS轴参数的 2.2.4 NC (2)5 程序的对应PLC轴与 2.3 NC ...................................................................................................... ......26 轴的导出和导入 2.4 NC Axis.......................................................................................................26 Encoder 编码器轴 2.5 时间轴 2.6 Generator............................................................................................. . (27)Time .................................................................................................. ........28 轴的调试NC 3 TwinCAT ............................................................................................ ..........................28 调试界面 3.1 Axis 3.1.1 General................................................................................................. .............................28 3.1.2 Settings................................................................................................ ..............................29 3.1.3 Parameter............................................................................................. ..............................30 3.1.4 Dynamic............................................................................................... .............................33 3.1.5.............................34 3.1.6 Functions.............................................................................................. .............................35 3.1.7 Coupling............................................................................................... .............................35 3.1.8 Compensation...................................................................................... ..............................36 使能和点动3.2 ....................................................................................................... ...................37 ................................................................................... ........................................37 准备工作3.2.1 .................................................................................................. .................................37 使能3.2.2 .................................................................................................. .................................38 点动3.2.3 .................................................................................................. .....................39 测试 3.3 Function Dynamics.............................................................................................. .......40 调试动态性能 3.4 齿轮联动3.5 ..................................................................................................... .........................41 ............................................................................. .................................................42 凸轮联动............42 示例Table3.6.1 Cam Cam Design Tool......................................................................................................42 安装3.6.2 .................................................................................................. ..........42 表Cam Table编辑 3.6.3 表Cam Table载入3.6.4 .................................................................................................... ........47 .............................................................................................. ......48 表Cam Table准备运行3.6.5 .............................................................................49 运行情况Cam中观察Scope View在3.6.6 .................................................................................................. ............................52 位置补偿3.7 - 1 -实用教程TwinCAT NC PTP ................................................................................................... ...................................54 飞锯3.8 ............................................................................................55 程序PLC单轴控制的NC 编写4 ........................................................................................................ ......................55 准备工作 4.1 引用引用 4.1.1 TcMc.lib................................................................................................ ............55 ...........................................................55 类型的变量NC_TO_PLC及PLC_TO_NC声明4.1.2 .................................................................................................. .................56 程序说明 4.1.3 PLC ..................................................................................................... .........................57 轴的管理 4.2 MC_Power............................................................................................ ...................57 使能 4.2.1 复位 4.2.2 MC_Reset............................................................................................. . (58)MC_ReadActualPosition....................................................................... ..58 读取当前位置 4.2.3 MC_SetActualPosition.......................................................................... ..58 设置当前位置4.2.4 .................................................................................................. ............................59 轴的动作 4.3 MC_MoveVelocity................................................................................ ...........59 匀速运动 4.3.1 MC_MoveAbsolute.............................................................................. ............60 绝对定位 4.3.2 MC_MoveRelative................................................................................ ...........60 相对定位 4.3.3 MC_Jog....................................................................................................................61 点动4.3.4 .................................................................................................. ................62 MC_Stop停止 4.3.5 MC_MoveModulo................................................................................ ........62 模长内定位 4.3.6 MC_NewPosAndVelo..................................................................64 重置目标位置和速度 4.3.7 MC_NewPos......................................................................................... ....65 重置目标位置 4.3.8 MC_Home............................................................................................ ......................65 寻参4.4 ..................................................................................................... ..........65 可选的寻参方式4.4.1 .................................................................................................. .........................66 寻参过程4.4.2 .................................................................................................. .....67 几种寻参方式的比较 4.4.3 MC_Home............................................................................................ ........69 寻参功能块4.4.4 .................................................................................................. .....................70 寻参的速度4.4.5 ...................................................................................................................70 参考点的位置 4.4.6 4.5 ................................................71 )External set value generation 位置外部设定值发生器( 4.5.1 MC_ExtSetPointGenEnable.................................................................. ............................71 4.5.2 MC_ExtSetPointGenDisable................................................................. ............................72 4.5.3 MC_ExtSetPointGenFeed..................................................................... ............................72 .......................................................................... ....................................................74 位置补偿 4.6 4.6.1 MC_MoveSuperImposedExt................................................................ .............................74 ......................................................................... ..............................75 适用位置补偿的场合4.6.2 .................................................................................................. .79 全闭环控制NC4.7 TwinCAT 4.8 ..................................................................................83 轴的参数设置NC程序修改PLC 从 ....................................................................................................... ...............85 轴的状态函数4.9 ..................................................................................................... ....87 多轴联动程序NC 编写5 ..............................................................................................................................87 电子齿轮 5.1 齿轮耦合5.1.1 .................................................................................................... .......................87 ............................................................................... ............................................88 齿轮解耦5.1.2 .................................................................................................. ............................90 电子凸轮 5.2 Table..................................................................................................... .......90 Cam 凸轮表5.2.1 .................................................................................................. .....90 凸轮表的耦合与解耦5.2.2 - 2 -实用教程TwinCAT NC PTP ................................................................................................... ................91 扩展凸轮耦合5.2.3 .................................................................................................. .........................93 凸轮缩放5.2.4 .. (9)3 凸轮在线修改的激活模式5.2.5 .................................................................................................. .............95 凸轮缩放的模式5.2.6 .................................................................................................. .........97 从文件装载凸轮表 5.2.7 修改凸轮表的关键点5.2.8 .......................................................................................................98 ................................................................................................... ...........99 收放卷及张力控制5.3 ..................................................................................................... ..........................99 功能块5.3.1 .................................................................................................. ...100 张力控制的原理框图5.3.2 .................................................................................................. ..........................102 万能飞锯5.4 ..................................................................................................... ..........103 接口 5.4.1. Interfaces .......................................................................................... ...............................103 速度同步 5.4.2. 位置同步5.4.3. ................................................................................................... ......................104 .............................................................................. ..........104 程序中实现飞锯功能PLC在5.4.4. ................................................................................................. ........................107 同步模式 5.4.5. FlyingSawCharacValues (1)08 飞锯同步特征值 5.4.6. Fifo....................................................................................................... ........110 NC 5.5 TwinCAT .............................................................................................110 组TwinCAT NC Fifo配置 5.5.1 5.5.2 Fifo (1)12 程序PLC控制的AX5000................................................................................................. 114 控制NC 6 TwinCAT ............................................................................................ ..................114 功能介绍 6.1 AX5000 .............................................................................................. ................115 接线说明 6.2 AX5000 AX5000.....................................................................115 中配置和调试System Manager在 6.3 安装6.3.1 . (1)15 配置工具AX5000 Firmware.............................................................................................. ..................115 更新6.3.2 (1)16 界面介绍Manager6.3.3 Drive AX5000................................................................................................. .................118 扫描6.3.4 .................................................................................................. ............121 ,AX5000配置 6.3.5 TwinCAT NC配置 6.3.6 轴。
PC 现场总线接口卡,交换机德国倍福培训手册

PC现场总线接口卡,交换机
12.04.2013
24
以太网交换机
CU2016 | 16 通道以太网交换机
16 个 RJ 45 以太网端口 可选的广播式滤波支持在实时环境下对 任何以太网设备进行的集成 可在基于数据包或基于端口的优先级 (QoS,VLAN)之间进行选择 10/100 Mbaud,半双工或全双工模式, 带速率自动检测功能 交叉检测:自动检测和纠正以太网电缆 的交叉或直通 一目了然的 LED 显示,快速诊断,每个 以太网端口配有 2 个 LED 快速 DIN 导轨安装 工业设计
PC现场总线接口卡,交换机
12.04.2013
3
FCxxxx | 带 PCI 接口的 PC 现场总线接口卡
PC现场总线接口卡,交换机
12.04.2013
4
带 PCI 接口的 PC 现场总线接口卡
功能特点
6 种现场总线 用于快速控制器和实时任务,如驱动位置控制 接口卡既有一通道的也有两通道的现场总线接口
全实时性 支持TwinCAT 例如,可以将一个 EtherCAT 装置分配为 8 个独立的网络,以提高其性能 可以实现 EtherCAT 的电缆冗余
PC现场总线接口卡,交换机
12.04.2013
27
Beckhoff 现场总线接口卡
带 PCI 接口的现场总线接口卡应用领域
PC现场总线接口卡,交换机
自动化新技术
PC 现场总线接口卡,交换机
PC现场总线接口卡,交换机
12.04.2013
1
适用于所有通用 I/O 和现场总线系统的现场总线组件
总线端子模块
Lightbus
EtherCAT 现场总线端子盒
德国beckhoff倍福RS485_BC8000控制器中文使用详解
在顶端 24V DC
供电
总线耦合器需要一个直流 24 伏的工作电源,它被接入 顶端的弹簧式插孔中,标有 24V 和 0V。此电源不仅给耦 合器的电子元件供电,而且通过 K 总线给总线端子供电。
3
PDF 文件使用 "pdfFactory Pro" 试用版本创建
天津天源科能自动化控制技术有限公司 联系人:江志军 手机:18920375500 电话:022-24051320 24051321
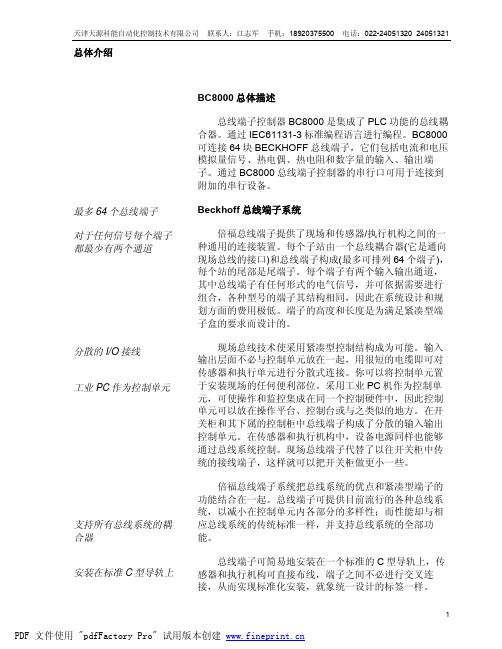
Beckhoff 总线端子系统
倍福总线端子提供了现场和传感器/执行机构之间的一 种通用的连接装置。每个子站由一个总线耦合器(它是通向 现场总线的接口)和总线端子构成(最多可排列 64 个端子), 每个站的尾部是尾端子。每个端子有两个输入输出通道, 其中总线端子有任何形式的电气信号,并可依据需要进行 组合,各种型号的端子其结构相同,因此在系统设计和规 划方面的费用极低。端子的高度和长度是为满足紧凑型端 子盒的要求而设计的。
电源触点
侧面弹簧接触
在总线耦合器的右侧面上有 3 个弹性电源接点。为避 免没有接触上,电源接点被嵌于凹槽中,当与总线端子相 连结时,总线端子左侧的片状触点与弹性接点连接在一 起。此凹槽及总线耦合器和总线端子的滑轨确保电源触点 的定位安全可靠。
RS485 连接
9 针 D 型插孔
在左侧有一个凹进去的插头,9 针 D 型插头连接器就 插在这里。关于 RS485 接口更详细的描述在这本手册中文 章标题为“媒介:插头和接线”中可以找到。
工作电源经过 3 个触点被输送到相邻的端子。根据需 要可以用电源输入端子将端子排分成几组,每一组有一个 单独的电源。这些电源输入端子不分配地址,可根据需要 只提供电源因,因而可以随意插入端子排的任何位置。
倍福BC9000使用说明
BC9000 快速入门概 述指导 Beckhoff 用户快速使用 BC9000 控制器。
该文档同样适用于 Beckhoff BCxx00 系列控制器。
文档中包含的文件文件名称 文件说明备 注关键字:TwinCAT,BC9000免责声明我们已对本文档描述的内容做测试。
但是差错在所难免,无法保证绝对正确并完全满足 您的使用需求。
本文档的内容可能随时更新,也欢迎您提出改进建议。
文档内容可能随时更新 如有改动,恕不事先通知BC9000 培训讲义Beckhoff 工业PC及高品味面板 Ø 控制器 Ø BC-系列 Ø BC9000 简介 Ø BC9000 开发流程 Beckhoff Ø 帮助信息 多功能控制器 Beckhoff Lightbus Beckhoff TwinCATBeckhoff 总线产品Beckhoff IP67总线盒Beckhoff 现场总线接口卡和 以太网产品Beckhoff EtherCATBeckhoff 伺服控制技术2007-11-22 Beckhoff BC9000 培训讲义-ERIC Page 1Beckhoff 控制器 PC-控制器Ø 控制器 Ø BC-系列 Ø BC9000 简介 Ø BC9000 开发流程 Ø 帮助信息小型控制器 PLC BXxxxxCXxxxxBCxxxx PC-Based 控制器2007-11-22 Beckhoff BC9000 培训讲义-ERIC Page 2BC-控制器产品一览Ø 控制器 Ø BC-系列 Ø BC9000 简介 Ø BC9000 开发流程 Ø 帮助信息Lightbus BC2000INTERBUS BC4000Modbus BC7300RS232/485 BC8x00/8150Ethernet BC9000/91002007-11-22 Beckhoff BC9000 培训讲义-ERICPROFIBUS, PROFIBUS BC3100/3150 CANopen, DeviceNet BCxx00/xx50Page 3BC9000/BC9100 简介BC9000 | 以太网 TCP/IP 总线端子控制器Ø 控制器 Ø BC-系列 Ø BC9000 简介 Ø BC9000 开发流程 Ø 帮助信息BC9000 控制器有一个以太网现场总线接口,在以太网系统中,可作 为分布式智能组件使用。
德国倍福小型培训课程推出EtherCAT技术介绍
德国倍福小型培训课程推出EtherCAT技术介绍
佚名
【期刊名称】《微计算机信息》
【年(卷),期】2007(000)03X
【摘要】德国倍福自动化有限公司的技术培训在2007年2月再次与大家见面了,这次培训保持了原有技术培训务实、高效的传统,在向大家展示了Beckhoff公司的理念及产品、技术外,又增添了一个新的亮点,即实时工业以太网现场总线EtherCAT技术介绍。
【总页数】1页(P319)
【正文语种】中文
【中图分类】TP336
【相关文献】
1.德国倍福EtherCAT产品首次亮相中国 [J], 无
2.德国倍福推出EtherCAT系列实时工业以太网 [J],
3.德国倍福小型培训课程推出EtherCAT技术介绍 [J],
4.德国倍福自动化有限公司EtherCAT测量模块 [J],
5.倍福推出采用TwinSAFE SC技术的ELX系列EtherCAT端子模块 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8 通道
滤波 0.2 ms
计数器
2 通道
加/减计数器 24 V DC,100 kHz
输出
8
M8
M12
24 V DC
8 通道
IMAX = 0.5 A
IP2000-Bxxx IE2000
IP2020-Bxxx IE2020 IP2040-Bxxx IE2040
IP2001-Bxxx IE2001
IP2021-Bxxx IE2021 IP2041-Bxxx IE2041
IP2312-Bxxx IE2312
8 通道
4 输入 + 4 输出 滤波 3.0 ms, IMAX = 2 A, 4 A
IP2320-Bxxx IE2320
IP2321-Bxxx IE2321
IP2322-Bxxx IE2322
8 通道
4 输入 + 4 输出 滤波 0.2 ms, IMAX = 2 A, 4 A
0…20 mA
4 通道
16 bit
现场总线端子盒
12.04.2013
22
现场总线端子盒
产品一览| 特殊功能端子模块
功能
位置测量 1 通道
SSI 传感器接口
M12
M23
IP5009-Bxxx IE5009 IP5109-Bxxx IE5109 IP5209-Bxxx (1 Vss) IP5209-Bxxx-1000 (11 µAss)
现场总线端子盒
12.04.2013
19
现场总线端子盒
产品一览 | 数字量 I/O
输入
24 V DC 8 通道
滤波 3.0 ms
8
IP1000-Bxxx IE1000 IP1010-Bxxx IE1010
M8
IP1001-Bxxx IE1001 IPBxxx IE1002 IP1012-Bxxx IE1012 IP1502-Bxxx IE1502
4 通道
差分输入,16 bit
热电阻
4 通道
热电阻 (RTD), PT100, PT200, PT500, PT1000, Ni100, 16 bit
热电偶
4 通道
热电偶,J, K, L, B, E, N, R, S, T, U 型,16 bit
输出
10 V 4 通道
16 bit
M12
IP4132-Bxxx IE4132 IP4112-Bxxx IE4112
现场总线端子盒
12.04.2013
16
现场总线端子盒
系统一览
现场总线端子盒
12.04.2013
17
现场总线端子盒
产品一览
现场总线端子盒
现场总线
紧凑型端子盒
现场总线端子盒
不带 IP-Link 接口
耦合器端子盒
现场总线端子盒
带 IP-Link 接口
PLC 端子盒
控制器 IEC 61131-3
带 IP-Link 接口
现场总线端子盒
12.04.2013
3
现场总线端子盒 | 紧凑型 IP 67 模块
现场总线端子盒
12.04.2013
4
现场总线端子盒 | 紧凑型 IP 67 模块
现场总线端子盒
12.04.2013
5
现场总线端子盒
现场总线概念的极致体现
鲁棒性
它的结构允许现场总线模块直 接安装在机械上,无需控制柜 和端子盒
接线迅速
通过使用预先配接好的电缆,大大简 化了现场总线和信号线的接线工作
现场总线端子盒
12.04.2013
6
现场总线端子盒
现场总线概念的极致体现
灵活性 易安装性
采用可在现场布线的连接器和 电缆
传感器和执行器通过弹簧式或螺旋 式连接器连接
完整性
信号类型范围广泛,可连接 几乎任何类型的传感器
兼容性
可与 Beckhoff 总线端子模块系 统兼容
Interbus CANopen
IPxxxx-B400 IPxxxx-B510 IPxxxx-B518
集成有T 形连接器
IL230x-B400 IL230x-B510 IL230x-B518
集成有T 形连接器
DeviceNet
IPxxxx-B520 IPxxxx-B528
集成有T 形连接器
IL230x-B520 IL230x-B528
16 通道 PWM 2 通道
IMAX = 0.5 A, 4 A, D-sub socket
PWM, 24 V DC, IMAX = 2.5 A
现场总线端子盒
产品一览| 混合型 I/O
混合型
24 V DC 8 通道
4 输入 + 4 输出 滤波 3.0 ms, IMAX = 0.5 A
8
IP2300-Bxxx IL2300-Bxxx IL2300-Cxxx IE2300
智能化
用于分布式控制和调控
经济性
由于采用混合型 I/O 模块,外 形尺寸精巧,因此系统成本低
现场总线端子盒
12.04.2013
7
现场总线端子盒
功能特点
现场总线接口输入,插头 现场总线接口输出,插孔 封盖式观察窗口 地址选择开关 和诊断接口 用于连接扩展模块的 IP-Link 接口 (在耦合器端子盒和 PLC 端子盒上)
密封性
模块符合防护等级 IP 65、IP 66 和 IP 67, 全浇铸型。因而是潮湿、脏乱、多尘工 作环境的理想选择
开放性
支持所有重要的现场总线系 统
体积小
模块尺寸极其小,因此适合 使用在非常小的空间位置处 175 mm x 30 mm x 26.5 mm (H x W x D)
模块化
扩展模块使得耦合器端子盒扩展成本 低,EtherCAT端子盒直接与EtherCAT通讯, 不要耦合器端子盒
IP2002-Bxxx IE2002
IP2022-Bxxx IE2022 IP2042-Bxxx IE2042 IE2808 IE2808-0001 IP2512-Bxxx IE2512
现场总线端子盒 12.04.2013 20
8 通道 8 通道
IMAX = 2 A, 4 A
IMAX = 2 A, 12 A
M8 螺旋式连接器 ,连接形式:直插 式
M8 螺旋式连接器, M12 螺旋式连接 器,连接形式:直 连接形式: 插式 直角式
M12 螺旋式连接 器,连接形式: 直角式
Ø 8 弹簧扣式连 接器,连接形式 :直插式
现场总线端子盒
12.04.2013
11
现场总线端子盒
4 种设备类型
紧凑型端子盒 IPxxxx-Byyy
自动化新技术
现场总线端子盒
现场总线端子盒
12.04.2013
1
Beckhoff 为所有通用的 I/O 和现场总线系统提供现场总线组件
总线端子模块
Lightbus
EtherCAT 现场总线端子盒
PC Fieldbus Cards, Switches
现场总线端子盒 12.04.2013 2
现场总线端子盒 | 紧凑型 IP 67 模块
紧凑型端子盒
现场总线端子盒
不带 IP-Link 接口
耦合器端子盒
现场总线端子盒
带 IP-Link 接口
PLC 端子盒
控制器 IEC 61131-3
带 IP-Link 接口
IL230x-B900 IL230x-B901
IL230x-C900
PROFINET
EtherNet/IP
IL230x-B903
IL230x-B905
阀岛
16 通道
带 IP-Link 接口的 Festo 阀岛, 尺寸为 10 mm
16 通道
带 IP-Link 接口的 Festo 阀岛, 尺寸为 14 mm
CPV14-VI-IP-8*
16 通道
带 IP-Link 接口的 SMC 阀岛
EX250**
I/O 数据通过抗干扰的 IP-Link 光导电缆 从扩展模块上被收集
IP-Link 电缆的准备工作迅速且简单
现场总线端子盒
12.04.2013
14
现场总线端子盒
IExxxx | 扩展端子盒
可以获得所有通用的 I/O 信号 可选择用 8 mm 弹簧扣式、M8螺旋式 或 M12 螺旋式连接器连接数字量 I/O 扩展端子盒通过耦合器端子盒与现场总 线连接 扩展模块之间的距离最长为15m 非常紧凑的外形尺寸: 125 mm x 30 mm x 27 mm
现场总线端子盒
12.04.2013
21
现场总线端子盒
产品一览| 模拟量 I/O
输入
10 V 4 通道
差分输入,16 bit
M12
IP3102-Bxxx IE3102 IP3112-Bxxx IE3112 IP3202-Bxxx IE3202 IP3312-Bxxx IE3312
0/4…20 mA
IP2330-Bxxx IE2330
IP2331-Bxxx IE2331
IP2332-Bxxx IE2332
16 通道
混合型输入/输出 滤波 3.0 ms, IMAX = 0.5 A
IP2400-Bxxx IE2400 IE2403
(IP 20, connector)
IP2401-Bxxx IE2401
用于逻辑输入/输出模块的独立电源
现场总线端子盒
12.04.2013
13
现场总线端子盒
IL230x-Bxxx | 耦合器
适用于 12 种现场总线系统的耦合器端 子盒 4 点数字量输入和 4 点数字量输出可选 用 M8、M12 或 Ø8 mm 连接器 每个耦合器端子盒最多可连接 120 个扩 展端子盒 自动识别所连接的扩展模块