压电作动器
有源控制解耦中压电作动器位置优化
对 于解 耦 的控 制 系 统 , 组作 动器 之 问是相 互 各 独立工 作 , 互不 影 响, 以有 所 第 i 作动器 的输入 控制 功率可 以表示 为 组
P —i b 3 : O La A 3 L L
f
—
/ 7
T_ 0
一
\ 】 2 3 4 , , ,) /
5 5 Y4 的取值 范 围为 05 6 y4≤O.L ~ 0.L6。 . f L
.
其中 F 肼=C ( ~ Bl t , 皿 ) F( )
.
H 一 :C( . , )B2 )。对 于给 定的控 制系统 , ( f
F脏与初始 干扰力 有关 ;
是解 耦系统 的控 制输入
简 单 实 用 的位 置优 化 准 则 。文 献 [] 出四组 作 动 7提
器 的对 称布 置形式 , 但没 有优 化压 电作动 器 的位 置 , 解耦 声辐射 模 态。
本 文 在 文献 [] 7 的基 础 上 以输入 的控 制 信 号 功 率 最小 为 目标 , 对作 动器 的位 置进行 优化 , 解耦 声辐
利 用 压 电材 料进 行 主动 控 制 时 , 电作 动器 的 压 布 置位 置是 一个 关键 问题 。任 秀华 等 n 从解 析 的角 度对 智 能梁上 的压 电作动 器 的最 优布 局 点给 出了合
1 解 耦 控 制 时压电作动器位置优化准 则
张曙 谱 建 立 了解 耦 状态 空 间 模 型 , 在状 态 空
独 立 的控 制 电压 信 号 ] ( l ~4) 替 上面 9 代 个
控 制 电压 信号 , 别 控制 四组压 电作动 器 。在 实 际 分
应用 中, 每组压电作动器可利用 电极正负极对应连
指数型变幅杆螺旋驱动直线压电作动器

第23卷 第10期2015年10月 光学精密工程 Optics and Precision Engineering Vol.23 No.10 Oct.2015 收稿日期:2015-05-15;修订日期:2015-06-10. 基金项目:国家自然科学基金(No.51275467);浙江省自然科学基金(No.LY16E05009)文章编号 1004-924X(2015)增-0335-08指数型变幅杆螺旋驱动直线压电作动器李加林1,2,华顺明2*,李志强1,孟玉明1,楼应侯2(1.太原科技大学机械工程学院,山西太原030024;2.浙江大学宁波理工学院,浙江宁波315100)摘要:为实现微小型机电系统中驱动单元的小型化,设计了一种采用指数型变幅杆放大定子振幅的螺杆式直线压电作动器。
分析了作动器运行机理,设计了作动器定子基体内螺纹副和变幅杆。
然后,利用有限元软件仿真分析了定子基体的振动模态。
最后,确定了作动器尺寸并加工出样机;搭建实验平台,对作动器样机的机械性能进行了测试。
测试结果显示,在电压有效值为300V,激励频率为15.6kHz,两相激励电压之间的相位差为π/2时,作动器输出直线速度最大值达到3.392mm/s,最大输出力达到15.02N。
得到的结果表明:作动器具有良好的输出性能,具备了作为微小型机电系统直接驱动单元的能力,可满足微小型设备微量进给的要求。
关 键 词:直线压电作动器;指数型变幅杆;螺旋驱动;弯曲振动中图分类号:TM384 文献标识码:A doi:10.3788/OPE.20152313.0335Spiral-driving linear piezoelectric actuator based onexponential amplitude transformerLI Jia-lin1,2,HUA Shun-ming2*,LI Zhi-qiang1,MENG Yu-ming1,LOU Ying-hou2(1.College of Mechanical Engineering,Taiyuan University of Science andTechnology,Taiyuan030024,China;2.Ningbo Institute of Technology,Zhejiang University,Ningbo 315100,China)*Corresponding author,E-mail:nithuasm@126.comAbstract:To miniaturize the driving unit in a micro-electro-mechanical system,a spiral-driving linearpiezoelectric actuator based on an exponential amplitude transformer was designed.the operationmechanism of the actuator was analyzed,and the screw pairs of stator and the exponential amplitudetransformer were designed.Then,the stator vibration modes were analyzed by finite element softwarein simulation.At last,the dimension of actuator was determined,the prototype was made,an experi-mental platform was established and the actuator output performance was tested.Under the condi-tions of an effective voltage of 300V,resonant frequency of 15.6kHz,the phase difference betweentwo driving voltages ofπ/2,the actuator reaches a maximum linear velocity of 3.392mm/s,and theoutput force of 15.02N.The test results indicate that the actuator has a good output performance,and it can be employed in MEMS driving unit to meet the demands of subminiature equipment for themicro feed.Key words:linear piezoelectric actuator;exponential amplitude transformer;spiral-driving;bendingvibration1 引 言 微小型机电系统可将电路与可动机械集成,组成具有独立完整功能的智能微型装置,成为近几十年来自然科学和工程技术的重要研究领域。
压电驱动器内部结构
压电驱动器内部结构压电驱动器是一种利用压电效应来产生机械运动的驱动器。
它由多个部分组成,每个部分都扮演着不同的角色。
本文将介绍压电驱动器的内部结构及其各个部分的作用。
1. 压电晶体片压电晶体片是压电驱动器的核心部件。
它是一个压电材料制成的薄片,在电场的激励下会产生机械运动。
其中比较常用的压电材料有铅锆钛酸钛(PZT)、铅镁铌酸钛(PMN)等。
压电晶体片的厚度通常只有几百微米,但长宽比可以非常大。
在许多应用中,压电晶体片需要尽可能地薄,以便在不影响整个系统的灵敏度的同时,能够尽可能地减小其质量。
2. 弹性杆弹性杆是与压电晶体片直接相连的一个棒状物体。
当压电晶体片在电场的激励下产生收缩或伸长时,弹性杆会沿着同一方向发生形变。
这使得机械运动可以被转换为物理运动,例如在液体中形成的压电声波。
弹性杆需要尽量的细长,以便将尽可能多的机械运动通过压电晶体片传递到外部。
此外,弹性杆也需要具有较高的弹性系数,以便在压电晶体片运动时,能够快速响应。
3. 机械负载机械负载指通过弹性杆产生的物理运动。
它可以是一个质量(例如液体),也可以是一个机械装置(如机械臂)。
在许多情况下,机械负载不仅需要能承受压电驱动器产生的力,还需要能够快速响应并进行精确定位。
4. 电子控制器电子控制器是用于控制压电驱动器的电子设备。
它的作用是控制电压和电流,以便对压电晶体片进行精确的驱动。
电子控制器通常会采用负反馈控制技术,以保持压电驱动器的输出运动的稳定性和准确性。
在某些情况下,电子控制器还可以使用高精度的时钟和传感器,以便对压电驱动器的输出行为进行更精细的控制。
该技术特别适用于需要高精度控制的应用,如精确定位或高精度测量。
总之,压电驱动器由多个部分组成,每个部分都至关重要。
通过设计合理的压电驱动器内部结构,可以有效地将压电效应的机械运动转化为物理运动,提高产品的运动灵敏度和精度。
尺蠖式压电线性作动器设计及实验研究

第 43 卷第 3 期2023 年 6 月振动、测试与诊断Vol. 43 No. 3Jun.2023 Journal of Vibration,Measurement & Diagnosis尺蠖式压电线性作动器设计及实验研究∗柏德恩1,邓少龙1,李云涛2,沈刚1,朱真才1(1.中国矿业大学机电工程学院 徐州, 221116) (2.上海航天控制技术研究所 上海, 201109)摘要针对空间环境下小型抓取操作机构对新型作动器的使用需求,考虑压电作动器具有耐温范围宽、无电磁干扰及断电自锁等特点,仿照昆虫尺蠖的行走方式设计一种新型压电线性作动器。
首先,利用柔性铰链式位移放大机构放大压电陶瓷(Pb⁃Zr⁃Ti,简称PZT)叠堆的输出位移,以增大线性作动器的移动步长及对导轨的夹紧变形量,将多个压电陶瓷叠堆器件分为3组,分别作为尺蠖式压电线性作动器的2个夹持单元和1个推进单元的激励源,以获得较大的驱动力并进一步增大作动器的移动步长;其次,借助有限元仿真分析软件,研究压电陶瓷叠堆力电耦合行为的预测方法,并实验验证该方法的可行性;然后,简化柔性铰链式位移放大机构,提出放大倍数的数值分析方法,对位移放大机构在压电陶瓷叠堆作动方向上的刚度进行仿真分析,并验证放大倍数的数值分析方法的准确性;最后,基于设计的线性作动器开展实验研究。
结果表明:位移放大机构对压电陶瓷叠堆输出位移的放大倍数为7.3,处于理论值与仿真值之间;在激励电压频率为5 Hz时,作动器的最大空载移动速度为413 μm/s;作动器的最大推动力为16 N,对应的驱动速度为19 μm/s。
以上研究结果能为小型抓取操作机构的智能驱动提供技术支持。
关键词尺蠖式;压电作动器;压电陶瓷叠堆;位移放大;断电自锁中图分类号TH122引言压电作动器利用压电材料的逆压电效应将电能转化为机械能,实现运动的输出,广泛应用于机器人[1⁃2]、精密仪器[3⁃5]、纳米级定位台[6⁃7]、多自由度指向平台[8⁃9]及生物工程[10⁃11]等领域。
柔性板压电作动器的优化位置与主动控制实验研究
因而作动 器位置 的不 当放 置 有 可能 激 发起 未 控模 态 的 响应 , 而导致控 制溢 出 ; 传感 器 位 置 的不 当 选择 会 从 而 使得所 采集 的信 号 中包 含 有 过 多 未 出。 因此 , 动器/ 作 传感 器 的优 化位 置 是
t i r是一类基 于群智能 ( w r t l e c ) iz ) me S am I e i ne 的随机 优 n lg 化算法 , 该方法具 有简单 易 行 、 计算 效 率 高 、 收敛 速度
其, [A[0 ]=?。入 中 =]= M , [ ] 二 一一 输 , 三
众所 周知 , 性结 构 ( 系统 ) 柔 或 为分 布 参数 系统 , 具 有无 穷多 自由度 。柔 性结 构 的 主动 控 制 实质 上 是 采用
有 限数量 的作 动 器 对 无 穷 多 自由度 的系 统 进 行 控 制 ,
位置 进行 研究 , 出粒子 群 算 法 的计 算格 式 , 且 通 过 给 并 数值仿 真 验算 该优 化方法 的有 效性 。
矩阵 决 定 于 控 制力 向量 配 置矩 阵 L, 由作 动 器 的位 置和类 型 决定 。本 文 中采 用 压 电作 动 器 , 动 器 向结 作
构 施加 控制 力矩 , 此其 控 制 力 ( ) 因 矩 向量 配置 矩 阵与
结 构模 态 的偏 导 数 有 关 , 可 以通 过 对 离 散 模 态 进 行 这 拟 合而 得到 连 续 形 式 的 模 态 函数 , 而 得 到 模 态 函数 进
f GKZ D0l 8 7) 00
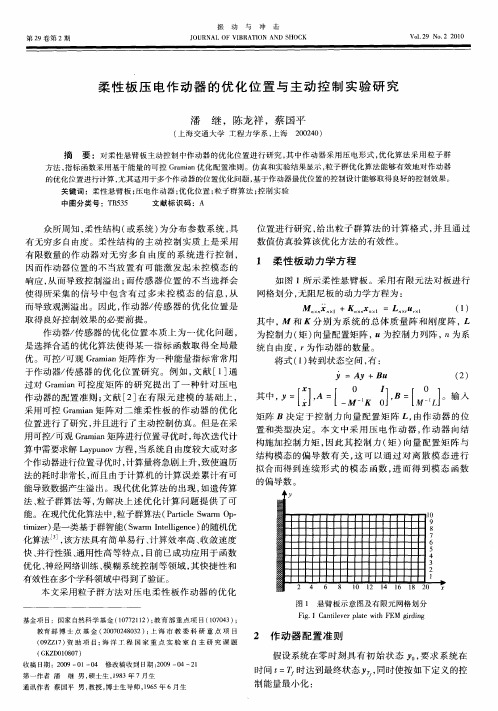
Fi 1 g. Ca ie e a e wih F nt v rplt t EM id n l gr i g
其 中 , 和 分 别 为 系 统 的 总 体 质量 阵 和 刚度 阵 , 为控制 力 ( ) 矩 向量 配 置矩 阵 , U为控 制力 列阵 , n为系 统 自由度 ,r 为作 动 器 的数 量 。 将式 ( ) 到状 态空 间 , : 1转 有
压电促动器的工作原理
一、引言随着科技的不断发展,电子设备的应用范围越来越广泛,而压电促动器也因其独特的工作原理和优越的性能,成为了电子设备中不可或缺的一部分。
本文将从压电促动器的工作原理入手,为大家详细介绍压电促动器的原理、特点和应用。
二、压电促动器的定义压电促动器是一种能够将电能转换为机械能的装置,它是由压电材料制成的。
压电材料是一种具有压电效应的材料,当施加电场时,它会产生机械应变,反之,当施加机械应力时,它也会产生电场。
压电促动器利用了这种特性,将电能转换成机械能,从而实现运动控制和精确定位。
三、压电促动器的工作原理压电促动器的工作原理基于压电效应。
压电效应是指在某些晶体中,当施加机械应力时,会产生电荷分布的变化,从而产生电场。
反之,当施加电场时,会产生晶体的形变,即机械应变。
这种效应被称为压电效应。
压电促动器通常由两个压电片组成,它们被夹在一起,中间放置一个金属片。
当施加电压时,压电片会产生机械应变,从而使金属片发生形变。
这种形变可以是线性的,也可以是旋转的,取决于压电片的排列方式。
通过改变电压的大小和极性,可以实现对金属片的控制,从而实现精确的运动控制和定位。
四、压电促动器的特点1.高精度:压电促动器具有高精度的特点,可以实现微米级的定位和控制。
2.快速响应:压电促动器的响应速度非常快,可以实现毫秒级的响应时间。
3.低噪音:压电促动器的工作过程中,没有机械接触,因此噪音非常低。
4.低功耗:压电促动器的功耗非常低,可以实现节能的效果。
5.可靠性高:压电促动器的结构简单,没有易损件,因此具有较高的可靠性。
五、压电促动器的应用1.精密仪器:压电促动器可以用于精密仪器中,如光学仪器、显微镜、精密测量仪器等。
2.精密机床:压电促动器可以用于精密机床中,如磨床、铣床、车床等。
3.医疗设备:压电促动器可以用于医疗设备中,如超声波探头、医用机器人等。
4.航空航天:压电促动器可以用于航空航天领域中,如卫星、导弹、飞机等。
5.电子设备:压电促动器可以用于各种电子设备中,如手机、平板电脑、电视等。
压电作动器概论
不能产生声辐射力的声场
• 不具有空间衰减和 梯度的行波
16
声辐射力
如何产生驻波声场?
声压分布 曲线
换能器 声压 声压 反节 声压 反节 声压 节面 面 节面 面
声反射面
17
声辐射力
驻波声场产生的声辐射力的一些重要特性
声压分布 曲线
D
3( s f ) 2 s f
换能器
声压 声压 反节 声压 反节 声压 节面 面 节面 面
29
单个压电元件的常用工作模态
切向振动模态
应用:单相超声电机
应用例: 超声电机
30
压电作动器中的夹心式换能器(Langevin Transducer)
纵向振动夹心式换能器
金属块
压电片
交流电压
极化方向 振动方向 螺杆结构
31
压电作动器中夹心式换能器的分类
• 纵向振动夹心式换能器(Langevin 换能器)
声反射面
f c2 f s cs2
(1)当 D+1-γ >0 (如水和空气中的固体颗粒), 声辐射力驱动 颗粒到声压节面; (2) 当 D+1-γ <0 (如水中气泡), 声辐射力驱动颗粒到声压反节 18 面。
声辐射力
如何获得具有空间衰减或梯度的行波来产生声辐射力?
声辐射点
声辐射线
声辐射面
2. 赵淳生,超声电机技术与应用,科学出版社,2007
5
质点椭圆运动引起的摩擦驱动力
振动引起的压力N
转子
摩擦 材料 定 子 定子 振动 转子 变形 定转子 之间的 压力N 摩擦驱动力 f = μN
6
质点椭圆运动引起的摩擦驱动力
动 子
压电作动器位移输出特性分析
压 电 作 动 器 位 移 输 出特 性 分 析
陶 帅 白鸿柏 何 建 设 侯 军 芳 , , ,
( .军 械 工 程 学 院 自行 火 炮 教 研 室 , 北 石 家 庄 0 0 0 ; .6 9 1部 队 , 北 武 汉 4 0 1 ) 1 河 50 3 2 3 3 湖 3 3 1
b t as a e s m e h n O d t h u u lo h v o t i g t o wih t en mb r ft s o h d e o t g n h r q e c ft ea d d v l g . e i ft ea d d v la e a d t ef e u n y o h d e o t e o me a Th u p tc r e a e c r an d i h r ce itc h s b i g o if u te o h c u a e mo e ig o h e o t u u v s h v e t i rf c a a t rs is t u rn s s me d fi l s f r t e a c r t d l ft e t c i n
TAO hu i S a ,BAIHo g i n ba ,HE i ns e ,HOU n a g Ja h 。 Ju f n
( .F c l f ef r p l d Gu Or n n eE gn e igCol e S ia h a g 0 0 0 , hn ; 1 a u t o l P o e e n, d a c n ie r l g , hj z u n 5 0 3 C i a y S l n e i
中 图 分 类 号 : 2 TP 1 文献标识码 : A
An l ss o he O u pu s l c m e tCha a t r s i s o e o l c r c Ac u t r a y i f t t tDi p a e n r c e itc f Pi z e e t i t a o
压电致动器工作原理
压电致动器工作原理压电致动器是一种常用的电力驱动装置,常用于各种机械设备中,如机器人、自动化生产线等。
它的工作原理是通过施加电场来改变其晶体结构,从而引起物理的形变或振动。
本文将详细介绍压电致动器的工作原理,并探讨其在实际应用中的一些特点。
1. 压电材料的基本原理压电致动器的核心是压电陶瓷材料,它具有压电效应。
压电效应是指某些晶体在受到外力或电场作用时,会发生形变或振动。
这是由于晶体内部存在正负电荷的不平衡,当外部力或电场施加到晶体上时,会引起正负电荷的重新排布,导致晶体的形状发生变化。
2. 压电致动器的结构和工作原理压电致动器通常由压电陶瓷片、电极、外壳和运动部件组成。
其中压电陶瓷片是核心部件,它充当了转换电能和机械能的媒介。
电极用于施加电场,外壳用于保护内部结构。
当施加电压到压电陶瓷片上时,由于压电效应的存在,陶瓷片的形状会发生变化,从而带动运动部件实现机械运动。
3. 压电致动器的工作模式压电致动器有两种基本的工作模式:位移模式和振动模式。
位移模式:在位移模式下,压电陶瓷片通过施加电场来实现线性位移。
当电场施加到陶瓷片上时,陶瓷片会发生相应的形变,并带动运动部件产生位移。
通过控制电场的大小和方向,可以精确控制致动器的位移量和速度。
振动模式:在振动模式下,压电陶瓷片通过施加电场来产生振动。
当电场施加到陶瓷片上时,陶瓷片会以高频率进行振动,从而产生声波或机械振动。
振动模式的压电致动器广泛应用于声波发射器、超声波清洗器等领域。
4. 压电致动器的特点和应用压电致动器具有以下几个优点:- 快速响应:由于压电致动器的工作原理简单,响应时间短,可以实时调节和控制。
- 较大的力量输出:压电陶瓷片的结构紧凑,可以产生较大的力矩或力量。
- 宽频率范围:压电致动器可以在不同的频率范围内进行工作,从几十赫兹到几千赫兹。
- 能量密度高:压电陶瓷片具有较高的能量密度,可以在小体积下实现较大力量输出。
基于以上特点,压电致动器在多个领域得到了广泛应用。
微动平台压电作动器低频模型
TAo Sh ua i , BA I Ho ng b a i 。 LI U Zhe ng u a ng
( 1 . T h e S e c o n d I n s t i t u t e o f E n g i n e e r i n g C o r p s , Ge n e r a l E q u i p me n t He a d q u a r t e r s , B e i j i n g 1 0 0 0 9 6 , Ch i n a ; 2 . Te a c h i n g a n d R e s e a r c h S e c t i o n o f S e l f — P r o p e l l e d Gu n , Or d n a n c e E n g i n e e r i n g C o l l e g e , S h i j i a z h u a n g 0 5 0 0 0 3 , C h i n a ) Ab s t r a c t : A n e w k i n d o f p i e z o e l e c t r i c a c t u a t o r f o r l o w f r e q u e n c y i s o l a t i o n h a s b e e n d e s i g n e d a i mi n g a t t h e l o w
压电作动器的率相关迟滞建模与跟踪控制
1 0 0 Hz 以内 , 幅值为 1 1 I n的 单 一 频 率 信 号 和 扫 频 信 号 以 及 变 幅 值 的 复合 频率 信 号 和正 弦扫 描 信 号 时 , 均 方 根 误 差 为
0 . 2 8 0 8 ~O . 4 3 7 3 “ n, I 相 对误 差 为 0 . 0 1 6 5 t0 . 0 2 4 4 , 并 且 具 有 良好 的 实 时 性 能 。与基 于前 馈 逆 补 偿 和 P I 反 馈 的复 合 控制策略相 比, 提 出 的基 于前 馈 自适 应 逆 补 偿 和 P I 反 馈 的 复 合 控 制 策 略具 有更 高 的跟 踪 精 度 。
以改进的 P r a n d t l — I s h l i n s k i i ( MP I ) 模 型 表示 静态 非 线 性 部 分 ,以外 因输 入 自回归 模 型 ( A u t o r e g r e s s i v e Mo d e l wi t h E x o g e n o u s I n p u t A R X) 表 示 动 态 线 性 部 分 ,建 立 了 能 够 描 述 压 电 作 动 器 率 相 关 迟 滞 特 性 的 Ha mme r s t e i n模 型 。 基 于 所 建 Ha mme r s t e i n 模 型 ,设计 了 基 于前 馈 自适 应 逆 补 偿 和 P I 反 馈 的复 合 控 制 策 略 。最 后 , 设 计 并 实 现 了基 于前 馈 逆 补 偿 和 P I 反馈 的 复合 控 制 策 略 来 对 比和 验 证 所 设 计 的 控 制 策 略 的 有 效性 。验 证 实 验 显 示 : 采 用 文 中设 计 的 控 制 策 略 实 时 跟 踪
压 电作 动 器 的率 相关 迟 滞 建模 与跟 踪 控 制
压电驱动技术及压电驱动器的应用研究

压电驱动技术及压电驱动器的应用研究压电驱动技术是一门研究压电材料在电偶极转换过程中的物理过程和应用技术的领域。
压电材料是一种特殊的功能材料,具有压电效应,即在受到外力压缩时会产生电荷,或者在施加电场时会发生形变。
通过利用压电效应,可以将电能转化为机械能,或者将机械能转化为电能,从而实现动力传递和控制。
压电驱动器是利用压电效应驱动的装置,通过施加电场或外力,使压电材料发生形变,实现机械部件的运动。
压电驱动器可以分为电压驱动器和力驱动器。
电压驱动器通过施加电场,利用压电材料产生形变;力驱动器通过施加外力,使压电材料发生形变。
压电驱动器的种类很多,根据应用需求可以选择不同类型的压电材料和驱动方式。
压电驱动技术有着广泛的应用。
在机械工程领域,压电驱动技术可以用于各种类型的执行器和传感器。
例如,压电驱动器可以用于调节阀门、喷嘴和泵等控制系统,实现对流量、压力和速度等参数的调节。
在机器人领域,压电驱动技术可以用于各种类型的关节和动力装置,实现机器人的运动和抓取等功能。
此外,压电驱动技术还可以应用于医疗设备、无人机、汽车和航天器等领域。
1.压电驱动器的设计与制造:研究如何选择适合的压电材料、设计合理的结构和控制电路,以及制造高性能的压电驱动器。
例如,可以研究不同类型的压电材料的性能特点和相互比较,以选择最合适的材料;通过改进结构设计和制造工艺,提高压电驱动器的输出效果和性能。
2.压电驱动器的控制与优化:研究如何实现对压电驱动器的精确控制和优化设计,提高其控制精度和响应速度。
例如,可以研究控制算法和方法,以实现对压电驱动器的高精度定位和力反馈控制;通过优化控制参数,提高压电驱动器的控制效率和性能。
3.压电驱动器的应用与系统集成:研究如何将压电驱动器应用于具体的系统和设备中,实现功能的扩展和集成。
例如,可以将压电驱动器与其他动力装置、传感器和控制系统相结合,构建复杂的多自由度机械系统;通过改进系统设计和集成方式,实现对压电驱动器的多参数控制和协同控制。
压电致动器的原理、选择和设计指南
压电致动器的原理、选择和设计指南文档下载说明Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document 压电致动器的原理、选择和设计指南can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!压电致动器是利用压电效应来产生位移或者力的一种器件。
压电效应是指在某些晶体(例如二铁矿石晶体)中,当受到外部电场作用时,晶体会产生形变;而反之,当晶体受到外部机械应力时,也会产生电荷。
压电致动器的工作原理就是利用这种压电效应。
当施加电压到压电致动器上时,晶体会产生形变,从而产生相应的位移或者力。
这使得压电致动器在各种应用中都有广泛的用途,例如用于精密仪器的定位控制、超声波发生器、声波传感器等。
一种新型直线压电作动器[发明专利]
![一种新型直线压电作动器[发明专利]](https://img.taocdn.com/s3/m/b12ec7997fd5360cbb1adb7d.png)
专利名称:一种新型直线压电作动器专利类型:发明专利
发明人:邵环宇
申请号:CN201711025925.1
申请日:20171027
公开号:CN107947448A
公开日:
20180420
专利内容由知识产权出版社提供
摘要:一种新型直线压电作动器,该作动器主要由丝杠、承载螺母、力矩电机及驱动螺母等组成,其特征在于:承载螺母、力矩电机和驱动螺母通过柔性联轴器依次连接在一起,置于外壳的内部,驱动螺母的另一侧设有压电叠堆,丝杠位于作动器的中心,穿过压电叠堆、驱动螺母、柔性联轴器、力矩电机和承载螺母,丝杠位于作动器内部的一端上设有滚珠花键,压电叠堆及滚珠花键均置于外壳的内部;本发明的优点是:该作动器螺旋箝位机构只需偏转扭矩,不需偏转力,可以方便地通过传统的电磁电机或者超声电机提供偏转扭矩,具有大行程、大推力、断电自锁和成本低等特点。
申请人:邵环宇
地址:225327 江苏省泰州市高港区永安洲镇明珠大道
国籍:CN
更多信息请下载全文后查看。
压电陶瓷微位移作动器
压电陶瓷微位移作动器压电陶瓷微位移作动器技术是一种新型的微纳米位移技术,它可以实现大范围的精密位移控制和高精度的空间时间控制。
压电陶瓷微位移作动器具有超低占用电路尺寸、高负载能力、高精度驱动和可靠高精度控制等特点,因此,它在精密定位、微机械、光学系统、微加工电机系统、高位移控制、精密检测、高分辨率微操作系统等领域具有重要的应用价值。
压电驱动器是压电驱动系统中的重要组成部分,其工作机理是使压电陶瓷片弯曲,产生位移的过程。
当压电陶瓷片被外部电场作用,压电陶瓷片的表面就会发生变形,使片内晶胞缩压、拉伸,产生弯曲现象并形成扭矩,这就是压电驱动器的原理。
压电驱动器具有低成本、轻量化、高动态性、节能环保等优点,这使得它们成为一种优良的位移控制元件。
压电陶瓷微位移作动器的设计原理是使用压电驱动器驱动压电陶瓷电梯以实现超精密位移控制,它能够满足大幅度位移需求而又具有超高的精度。
在微位移作动器中,利用压电驱动器的输出力和精密的控制系统,实现高精度的正反转、步进控制和宽范围的位移控制。
同时,压电陶瓷微位移作动器更加紧凑,使电路尺寸可以有效减小,这使得它可以用于多种精密控制系统中。
同时,压电陶瓷微位移作动器除了具有上述性能优异之外,它还具有良好的柔性驱动特性和稳定的压电机械特性,同时可以实现高精度的变形控制。
此外,压电陶瓷微位移作动器的安装及维护更加简单,更加方便快捷,在安装及维修过程中,可以省去拆解、清洁及安装的步骤。
压电陶瓷微位移作动器的应用前景非常广阔,在机械、微机械、光学、智能机器人等领域有着重要的应用价值,它可以替代传统的机械式操作,更加精确地控制位移,实现更加精准的工作。
压电陶瓷微位移作动器的发展,有助于推动技术的进步,提高人类的生活品质。
总而言之,压电陶瓷微位移作动器的发展是将受到投资者和工程师的越来越多的关注,其发展前景十分乐观。
压电陶瓷微位移作动器将在未来精密定位、精密检测、微机械、高位移控制、高分辨率微操作系统等领域发挥重要作用,带来重大的技术突破和创新。
压电致动器原理
压电致动器原理
压电致动器是一种利用压电效应(或反压电效应)产生位移或力的装置。
压电效应是指某些晶体材料在受到外力作用时会发生尺寸变化,而反压电效应是指当施加电场时,晶体材料会产生形变。
压电致动器的原理就是利用压电效应或反压电效应来产生位移或力。
一般而言,压电致动器由压电陶瓷和电极组成。
当施加电压到电极上时,电极周围的压电陶瓷会发生尺寸变化或形变,从而产生位移或力。
压电致动器的工作原理可以分为两种情况:压电致动器的力产生和压电致动器的位移产生。
对于力产生的压电致动器,当施加电压时,电极周围的压电陶瓷会发生形变,形成力。
这种力可以用于推动机械部件的运动或产生其他需要力的应用。
对于位移产生的压电致动器,当施加电压时,电极周围的压电陶瓷以及与之连接的机械部件会发生形变,从而产生位移。
这种位移可以用于精确控制机械部件的位置或产生其他需要位置控制的应用。
压电致动器由于具有快速响应、高精度、高负载能力等特点,广泛应用于医疗设备、精密仪器、机械自动化等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对压电作动器用于振动噪声控制的原理和控制方法进行分析讨论,并举例说明。
原理:压电材料是种具有力一电耦合性质的智能材料,能靠材料的正、逆压电效应实现能量转换。
压电材料的正压电效应是指,当对压电材料施加力使之产生变形时,它会产生电荷;压电材料的逆压电效应是指,当给压电材料施加电场时,材料会产生应变。
压电材料的这种特性使得它能很好地同时承担起感应器和作动器的功能。
压电主动控制的基本原理是以压电材料作为受控结构的传感器和作动器,由传感器感受因振动产生的结构应变,将其转变为响应的电信号,并通过一定控制规律产生控制信号,经放大后施加于作动器,由作动器将电能转换为机械能,从而实现智能结构的振动控制。
控制方法:
控制方法即设计控制律所采用的控制理论及控制器分析和综合方法, 是振动主动控制的核心环节, 其最终任务是在满足各种实际约束的条件下, 使结构目标位置的振动水平达到最小。
(1)特征结构配置法。
特征结构包括特征值和特征向量, 闭环系统的特征值决定了系统的动态特性, 特征向量则影响着扰动输入对结构的激励能力以
及结构上目标点或目标区域的响应水平。
通过同时配置系统的特征值和特征向量,可以增加结构阻尼,在一定范围内改变结构频率以避开扰动的主
频段, 以及改善系统性能, 并降低控制能量消耗。
该方法可采用状态反馈或直接输出反馈, 首先将控制目标直接或间接地以理想的特征结构来表
征, 构造适当的优化问题来求解最优反馈矩阵,控制器设计就体现在优化
目标函数的构造方法上。
(2)线性二次最优控制。
它以控制输入和性能输出的加权二次型为优化指标, 兼顾了控制能量和控制性能, 理论形式简单, 物理意义清晰, 可以比较
容易地求得解析形式的控制律, 因此在振动控制中被广泛应用。
王宗利等提出了一种状态相关方法, 针对模态坐标下的方程, 在控制过程中每隔
一定时间根据各模态的响应动态调整优化指标中状态加权矩阵, 并在线
重新求解反馈矩阵, 以加强对主要模态的控制能力。
(3)独立模态空间控制是用于结构振动控制的一种有效策略, 它利用了结构动力学方程可以模态解祸的特性, 在模态坐标下将高维的动力学方程分
解为一系列并联的二阶系统, 选择其中的少数主要模态称为受控模态分
别控制, 大大降低了控制器分析设计的难度和工作量。
Mirovitch采用先
由离散传感器输出插值得到结构的连续振型再由模态正交性计算模态位
移或速度的方法。
(4)其他方法,如自适应控制、神经网络控制、模糊控制、滑模控制等等, 以及两种或几种方法复合派生的一些方法。
参考文献:[1] 邢峰,张让辉,王敦富,支晓华,压电智能结构振动控制技术的研究与展望,机械管理开发,2011(3)
[2] 王锋,压电结构建模、优化与振动控制,国防科学技术大学博士论文,2006。