西门子伺服驱动系统分析
808D数控车床电气控制系统设计说明书

摘要数控技术发展飞速的今天,数控技术在现代制造业发挥越来越重要的作用,数控机床是数控制造业的核心,本文主要介绍了对数控车床的电气系统设计的过程。
本设计以CK6140车床为载体,对其数控电气系统经行详细设计。
其内容包括强电设计、弱电设计、PLC输入输出及接口设计,本设计选用西门子808D数控系统。
最后绘制出整个机床的电气系统原理图等。
本设计给出了整个机床的原理图绘制过程,重点部分模块化,较详细地介绍了各个部分的功能及用途。
分为 380V强电回路,控制回路,PLC输入输出控制,主轴驱动模块和进给伺服驱动模块,并介绍了相关的电气知识。
通过本设计说明书可以基本上掌握数控车床的电气原理,以及基本的电气常识,使读者无论是从整体上还是各个模块中都能够了解到数控车床相关的一系列电气知识。
关键词:数控系统;数控车床;PLC控制1ABSTRACTThe numerical controls that the technique development fast today, the numerical controls technique at the modern manufacturing industry exertive more and more importance function, numerical control tool machine is number control a manufacturing industry of core, this text mainly introduced logarithms to control the processed that the electricity system of lather design.The design CK6140 lathe as the carrier, the detailed design of the its NC electrical system through the line. its contents includes a strong electrically design, weakness design, PLC importation output and Interface design. The design uses a Siemens 808D CNC system. Finally, to map out the whole machine electrical system schematic. This principle diagram which designs to the whole tool machine draws process and the point parts of mold piece turn and compared to in detail introduce each function and use of part. Is divided into the 380 Vs strong electricity back track, control back track, the PLC importation outputs a control, the principal axis drives a mold piece and enters to servo drive a mold piece, and introduced related electronic knowledge.Through this design system can basically control numerical control the electricity principle of lather, and basic electronic common sense, make the reader regardless can understand numerical control the lather related series of electricity knowledge from wholly the top still each mold piece.Key Words:NC system; NC lathe; PLC control2目录摘要------------------------------------------------------------------------------------------------------- 1 ABSTRACT ------------------------------------------------------------------------------------------- 2目录------------------------------------------------------------------------------------------------------ 3第一章绪论----------------------------------------------------------------------------------------- 61.1前言 ------------------------------------------------------------------------------------------ 61.2国外数控系统的发展趋势 ------------------------------------------------------------- 61.2.1新一代数控系统采用开放式体系结构 ------------------------------------ 61.2.2新一代数控系统控制性能大大提高---------------------------------------- 71.2.3数控系统向软数控方向发展 ------------------------------------------------- 71.3我国数控技术的发展-------------------------------------------------------------------- 81.4CK6140数控车床主简介 ---------------------------------------------------------------- 9第二章西门子808D数控车床系统 --------------------------------------------------------- 112.1 西门子808D系统简介 --------------------------------------------------------------- 112.2人机界面 ---------------------------------------------------------------------------------- 132.3进给系统 ---------------------------------------------------------------------------------- 132.4 主轴驱动系统--------------------------------------------------------------------------- 132.5刀架控制系统 --------------------------------------------------------------------------- 142.6电柜设计及电源选用------------------------------------------------------------------ 142.6.1在设计电柜时应注意以下事项:----------------------------------------- 142.6.2 24VDC电源选用---------------------------------------------------------------- 152.7数控系统各部分的连接及接口 ----------------------------------------------------- 152.7.1系统的接线---------------------------------------------------------------------- 152.7.2 接口布置 ------------------------------------------------------------------------ 15第三章CK6140数控车床的基本组成和工作原理 --------------------------------------- 173.1数控车床组成 --------------------------------------------------------------------------- 173.2数控车床工作原理 --------------------------------------------------------------------- 193.3 CK6140数控车床运动分析 ---------------------------------------------------------- 2033.4 CK6140数控车床电气系统简述 ---------------------------------------------------- 21第四章CK6140数控车床硬件系统设计及元件选型------------------------------------ 254.1主轴驱动系统 --------------------------------------------------------------------------- 254.1.1主轴电动机---------------------------------------------------------------------- 254.1.2主轴电动机选型 --------------------------------------------------------------- 254.2机床进给伺服系统 --------------------------------------------------------------------- 264.2.1 CK6140数控车床对伺服驱动进给系统的要求------------------------ 274.2.2 伺服电机的选型--------------------------------------------------------------- 284.3控制电路原理图设计------------------------------------------------------------------ 314.3.1 380V系统强电控制回路----------------------------------------------------- 314.3.2电源回路 ------------------------------------------------------------------------- 334.4常用电器元件的选型------------------------------------------------------------------ 344.4.1低压电器选型的一般原则 -------------------------------------------------- 344.4.2断路器的选型------------------------------------------------------------------- 344.4.3电动机保护用自动开关的选型 -------------------------------------------- 354.4.4 熔断器选型 --------------------------------------------------------------------- 354.4.5接触器的选型------------------------------------------------------------------- 354.4.6热继电器的选型 --------------------------------------------------------------- 364.4.7中间继电器---------------------------------------------------------------------- 364.5 CK6140数控车床控制面板 ---------------------------------------------------------- 37第五章PLC设计及参数设置------------------------------------------------------------------- 395.1 PLC的基本结构及工作原理 --------------------------------------------------------- 395.2 PLC与CNC机床的联接方式 -------------------------------------------------------- 405.3 CNC加工代码在PLC上的实现方法----------------------------------------------- 415.3.1 T功能代码的实现方法------------------------------------------------------- 425.3.2 M功能代码实现方法--------------------------------------------------------- 425.4 PLC程序的模块化设计---------------------------------------------------------------- 425.5 PLC输入输出地址分配---------------------------------------------------------------- 425.6参数设置 ---------------------------------------------------------------------------------- 4445.6.1 PLC参数设置-------------------------------------------------------------------- 445.6.2机床参数设置------------------------------------------------------------------- 45第六章结论--------------------------------------------------------------------------------------- 47致谢 -------------------------------------------------------------------------------------------------- 48参考文献 --------------------------------------------------------------------------------------------- 495第一章绪论1.1前言装备工业的技术水平和现代化程度决定着整个国民经济的水平和现代化程度,机床制造业是一个国家的基本装备工业,是工业生产的技术基础,数控技术在给机床制造业带来显著经济效益及广阔发展前景的同时,也是发展新兴高新技术产业和尖端工业(如信息技术及其产业、航空、航天等国防工业产业)的使能技术和最基本的装备,因此它已成为衡量一个国家制造业水平的重要标志之一。
曲轴平衡机S120驱动系统报文通讯分析

曲轴平衡机 S120驱动系统报文通讯分析摘要曲轴平衡机上的S120驱动系统采用西门子370#标准报文来与电源模块通讯,采用自由报文与CU320以及驱动器通讯。
通过对曲轴平衡机S120驱动系统与PLC系统的报文通讯具体分析,来分析报文通讯的应用方法,并在现有报文基础上修正报文BICO互连缺陷及对应的PLC程序,使设备功能更加合理。
关键词:S120驱动系统;报文通讯;控制字;状态字;引言西门子SINAMICS驱动系统是当前在机械加工设备上应用极为广泛的变频器系统,SINAMICS系列中的SINAMICS S120 是集V/F 控制、矢量控制、伺服控制为一体的多轴驱动系统。
要实现PLC控制S120驱动系统实现控制功能必须与其实现通讯, PLC与S120系统通过通讯协议(报文)来实现数据传输。
本文主要从2个方面进行分析S120报文通讯在曲轴平衡机上的实际应用及改进:1.S120报文通讯介绍:标准报文和自由报文规则;2.曲轴平衡机S120系统报文通讯应用分析及现有报文通讯缺陷问题改进优化分析。
1S120系统报文通讯方式介绍设备要实现相应的功能,必须有控制器(PLC)发出相应的指令,S120的控制模块(CU)接收到指令后控制电源模块和电机模块执行对应的运动控制,如电机启动、旋转等。
设备常借助于PROFIBUS-DP来实现SIMATIC S7-300 与SINAMICS S120之间的数据交换,用S7-300来控制S120的运转及读写所需的参数。
S7-300 与SINAMICS S120交换的数据字的数量及各字的含义。
根据不同的应用来选择相应的报文(此处的报文是指通讯过程中的通讯协议)。
S120 中的报文结构分为三类:1、标准报文(1#、2#、3#、4#、5#、6#、7#、20#报文)标准报文是根据Profidrive规范制定的常规报文,当选择标准报文时,内部的过程参数会自动链接。
选择报文在参数P0922中设定,或者在组态驱动时选择。
西门子伺服
西门子伺服西门子伺服系统是一种精密的控制系统,用于驱动工业机械和设备。
它采用先进的技术,提供高效、精确和可靠的运动控制解决方案。
西门子伺服系统被广泛应用于各种行业,包括制造业、汽车工业、航空航天等领域。
本文将介绍西门子伺服系统的工作原理、特点以及应用。
工作原理西门子伺服系统由伺服驱动器和伺服电机组成。
伺服驱动器接收来自控制器的指令信号,并控制伺服电机的转速和位置。
伺服电机是一种特殊的电动机,具有高精度、高速度和高扭矩的特点,适用于需要精密控制的工业应用。
在工作时,伺服系统通过不断地检测反馈信号(如位置、速度、加速度等),将其与目标值进行比较,然后调整电机的转速和位置,使其达到所需的控制效果。
这种闭环控制系统可以实现高精度、高可靠性的运动控制。
特点西门子伺服系统具有以下特点:•高精度:西门子伺服系统采用先进的控制算法和传感器技术,可以实现非常高精度的位置、速度和力控制。
•高效率:伺服电机具有高效率、高力矩密度,能够在短时间内实现快速的加减速。
•高可靠性:西门子伺服系统采用可靠的组件和设计,能够在恶劣的工业环境下稳定运行。
•灵活性:伺服系统支持各种运动控制模式,可以满足不同工业应用的需求。
应用西门子伺服系统被广泛应用于以下领域:1.制造业:西门子伺服系统可以驱动各类生产设备,如机床、激光切割机、注塑机等,实现高精度的加工和生产。
2.汽车工业:在汽车生产线上,西门子伺服系统可以控制机器人、传送带等设备,自动完成组装、焊接等工序。
3.医疗设备:西门子伺服系统用于驱动医疗设备的运动部件,如影像设备、手术机器人等,保证操作的精确性和稳定性。
4.航空航天:在航空航天领域,西门子伺服系统被用于控制飞机机翼、导航系统等部件,确保飞行安全和精准度。
综上所述,西门子伺服系统作为一种先进的运动控制技术,已经成为工业自动化领域的重要组成部分,为工业生产和制造提供了高效、精确和可靠的解决方案。
SINAMICS_Startdrive_V16功能在TIA博途的应用
第58卷0引言SI N A M I CS St ar t dr i ve 可以用来在TI A Por t al中进行西门子驱动的配置和参数设置。
可进行以下任务:将驱动嵌入项目,作为单个驱动或将驱动与上级控制系统进行联网;对所用功率部件、电机和编码器进行参数配置(包括最新的S210系列驱动产品);支持配置多种控方式来控制驱动;支持驱动专用功能(如自由功能块和工艺控制器)等扩展参数设置;通过驱动控制面板在线测试驱动参数设置;出现故障时执行诊断。
1概述1.1软件简介SI N A M I CS St ar t dr i ve 调试软件是将西门子驱动器硬件集成到TI A Por t al工程框架中的理想工具。
借助最新版本的SI N A M I CS St ar t dr i ve V 16,西门子正在扩展自动化平台上可用的驱动硬件产品组合。
该软件有两个版本:St ar t dr i ve Bas i c 和St ar t dr i ve A dvanced 。
Bas i c 版包括驱动设备的调试和诊断功能。
A dvanced 版除了包含Bas i c 版的所有功能外,还包含SI N A M I CS S120,G 120和S210的集成安全验收测试功能。
1.2新功能介绍SI N A M I CS St ar t dr i ve 调试工具是自动化设备调试的关键软件。
利用博途平台,驱动器和控制器之间的便捷交互使SI M A TI C 控制器和SI N A M I CS 驱动器轻松完成运动控制项目的调试。
从V 16版本开始,其功能得到了进一步增强。
在集成了SI N A M I CS S120多轴系统CU 320-2PN 之后,从V 16开始也支持组态和调试CU 310-2PN 及PM 240-2。
CU 310-2PN 是S120高端伺服驱动系统的单轴控制单元。
最新推出的SI M A TI C 驱动运动控制器(Si m at i c D r i ve Cont r ol l er )的驱动控制也集成在St ar t dr i ve 调试工具中。
数控设备调试与维修6-实验五 SIMODRIVE 611U伺服驱动的配置
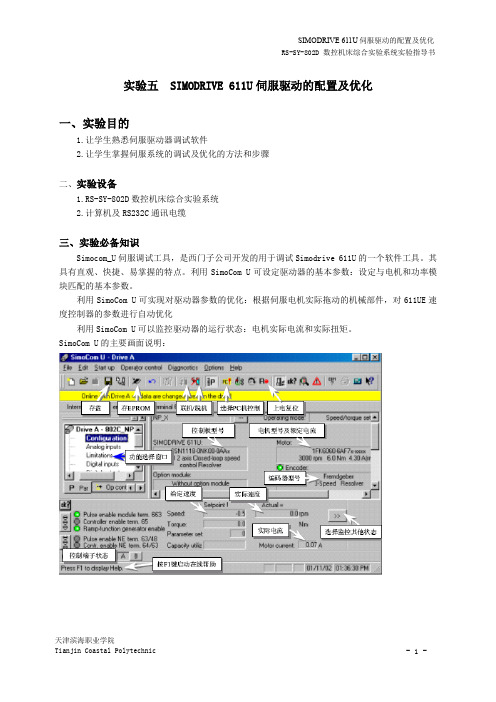
实验五 SIMODRIVE 611U伺服驱动的配置及优化一、实验目的1.让学生熟悉伺服驱动器调试软件2.让学生掌握伺服系统的调试及优化的方法和步骤二、实验设备1.RS-SY-802D数控机床综合实验系统2.计算机及RS232C通讯电缆三、实验必备知识Simocom_U伺服调试工具,是西门子公司开发的用于调试Simodrive 611U的一个软件工具。
其具有直观、快捷、易掌握的特点。
利用SimoCom U可设定驱动器的基本参数:设定与电机和功率模块匹配的基本参数。
利用SimoCom U可实现对驱动器参数的优化:根据伺服电机实际拖动的机械部件,对611UE速度控制器的参数进行自动优化利用SimoCom U可以监控驱动器的运行状态:电机实际电流和实际扭矩。
SimoCom U的主要画面说明:四、实验内容1.驱动器的调试2.驱动器的优化五、实验步骤1.驱动器的调试步骤一在断电的情况下(台式电脑要拔下电源插头!),用RS232电缆连接PC的COM口与611U 上的X471端口。
步骤二驱动器上电,在611UE的液晶窗口显示:“A1106”表示驱动器没有数据;R/F红灯亮;总线接口模块上的红灯亮步骤三从WINDOWS的“开始”中找到驱动器调试工具SimoCom U,并启动;步骤四选择连机方式步骤五进入连接画面后,自动进入参数设定画面:在软件的提示下进行参数的设定:1)定义驱动器的名称,通常可以用轴的名称来定义,如该驱动器用于X轴我们可以添入XK7124_X2)输入PROFIBUS总线地址:3)设定电机型号:4) 选择编码器,选择标准编码器( 2048 P sin/con信号,1Vpp) 如为其他编码器请选择Enter Data 并如实输入编码器数据。
5)选择运行模式6)直接测量系统的设定7)直接测量系统参数8)存储参数9)配置完成611UE的R/F红灯灭,液晶窗口显示“A0831”—表示总线数据通讯;总线接口模块上的红灯亮若PLC控制电源模块的端子48、63、64分别与端子9接通,电源模块的黄灯亮,表示电源模块已使能;坐标轴配置的不正确可导致驱动及电机出现故障,如数据未存储也会在伺服单元掉电后,在伺服驱动器上出现1106号报警。
西门子840D伺服系统控制参数优化分析与研究
西门子840D伺服系统控制参数优化分析与研究作者:刘端健阳春华来源:《计算技术与自动化》2013年第02期摘要:在分析现代机械加工制造行业中高精密数控机床伺服系统控制参数优化重要性的基础上,简要介绍应用普遍的西门子840D伺服系统,着重研究西门子840D伺服系统控制参数优化的原理与方法。
对使用840D伺服系统的圆柱齿轮加工机床的位置环、电流环与速度环进行优化,通过对比优化前后的加工效果和同步误差,证明伺服系统控制参数优化可以提高齿轮齿面加工精度和光洁度以及加工效率。
关键词:伺服系统;控制参数;840D中图分类号:TG659 文献标识码:A1引言现代高精度数控机床是实现各种复杂曲面零件的精密加工的最重要的关键设备,很多精密数控机床的直线轴都采用当今最先进的直接驱动(直驱)技术,由伺服电机直接驱动进给装置,通过多种方式的插补技术很好满足了加工高精度和高表面光洁度复杂工件的要求。
直驱技术其优点是动态响应特性好、运行速度快,精度高。
由于驱动部件跟负载间直接连接,无需做额外的硬件连接误差补偿。
因此直驱技术在各种中、高端的机床产品和模具生产机床中得到了广泛的应用[1]。
直驱技术虽然具有上述优点,但是由于省去了电机跟负载端的机械传动链,传动比近似为1:1,这也使得电机对负载变化显得格外敏感[2],同时负载的固有频率容易引起伺服电机驱动系统产生共振现象,引起机床在加工零部件过程中表现出震动和抖动以及加工噪声等现象。
因此需要对伺服系统的速度环、电流环、位置环控制参数进行优化[3]。
2西门子840D伺服系统简介西门子840D伺服系统是西门子公司于上世纪90年代推出的高档产品。
它保留了前两代产品高效的三CPU结构:人机通信CPU(MMCCPU)、数字控制CPU(NCCPU)和可编程逻辑控制器CPU(PLCCPU)。
840D伺服系统具有数字化驱动、可控制的轴多、操作系统视窗化、软件内容丰富、五轴联动模块化设计等优点。
西门子840D伺服系统控制框图如图1所示,主要包括:1)数字控制单元NCU,集成了SINUMERIK 840D 数控CPU 和SIMATIC PLC CPU 芯片,包括相应的数控软件和PLC 控制软件。
西门子V90伺服系统优势分析
SINAMICS V90伺服驱动和SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW到7.0kW以及单相和三相的供电系统使其可以广泛用于各行各业,如:定位,输送,收放卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合,实现丰富的例如凸轮/齿轮等运动控制功能,应用在横切、追剪等设备中。
SINAMICS V90 伺服驱动系统特点概述伺服性能优异1、先进的一键优化及自动实时优化功能使设备获得更高的动态性能2、自动抑制机械谐振频率3、1 MHz 的高速脉冲输入4、20 位分辨率的多圈绝对值编码器性价比高1、集成所有控制模式:外部脉冲位置控制、内部设定值位置控制(通过程序步或Modbus或PROFINET)、速度控制和扭矩控制2、集成内部设定值位置控制功能3、全功率驱动标配内置制动电阻4、集成抱闸继电器(400V 型),无需外部继电器使用方便1、集成了PTI, PROFINET, USS, Modbus RTU多种上位接口方式2、与控制系统的连接快捷简单3、西门子一站式提供所有组件4、快速便捷的伺服优化和机械优化5、简单易用的SINAMICS V-ASSISTANT 调试工具6、通用SD 卡参数复制运行可靠1、更宽的电压范围:200 V ... 240 V –15% / +10% (230V 型) 及380 V (480)V –15% / +10% (400V 型)2、高品质的电机轴承3、电机防护等级IP 65,轴端标配油封4、集成安全扭矩停止(STO)功能5、驱动与电机可靠组合Sinamcs V90集成了丰富的控制模式,如外部脉冲位置控制(PTI)、USS/Modbus 连接、内置定位(IPos)以及转速和转矩控制等,方便用户使用。
全功率集成的制动电阻也降低了用户成本。
此外,伺服驱动器还具有高达1MHz的高速脉冲输入,并支持20位分辨率的绝对编码器。
PLC控制伺服电机实例分析

PLC控制伺服电机实例分析PLC控制伺服电机是工业自动化领域中常见的一种应用,通过PLC控制器来实现对伺服电机的精准控制,使得生产线的运作更加高效和稳定。
在本文中,将以一个实际的应用案例来介绍PLC控制伺服电机的工作原理和实现过程。
一、系统结构本系统采用的是西门子PLC控制器和西门子伺服电机,系统主要由PLC控制器、伺服驱动器和伺服电机组成。
PLC控制器负责接收外部信号,进行逻辑控制,并向伺服驱动器发送控制指令,伺服驱动器则接收这些指令并控制伺服电机的运动。
二、PLC编程在PLC编程中,需要定义输入输出引脚、变量和逻辑控制程序。
首先需要定义输入引脚,用于接收外部传感器信号,比如光电传感器、开关等;然后定义输出引脚,用于控制伺服驱动器,实现对伺服电机的启停和速度调节;接着定义一些变量,用于存储中间状态和控制参数;最后编写逻辑控制程序,根据输入信号和变量状态来控制伺服电机的运动。
三、伺服电机控制伺服电机的控制主要包括位置控制、速度控制和力矩控制。
在PLC编程中,可以通过设定目标位置、目标速度和目标力矩来实现对伺服电机的控制。
通过调节PID控制器的参数,可以实现对伺服电机的精准控制。
四、系统调试在系统调试中,需要先进行参数设置和校准,确保伺服电机的运动符合预期。
然后通过PLC编程调试工具,监控伺服电机的运动状态和控制指令,发现问题并及时修复。
最后对整个系统进行测试,验证其性能和稳定性。
综上所述,PLC控制伺服电机是一种高效、稳定的控制方式,适用于各种需要精准位置和速度控制的场合。
通过合理的PLC编程和参数设置,可以实现对伺服电机的精确控制,提高生产效率和品质。
在实际应用中,需要根据具体情况进行调整和优化,确保系统的稳定性和可靠性。
基于S7-1200 PLC的伺服电机运动控制系统设计

4结语在大数据时代,信息安全要求不断提高,网络规模飞速扩展,使安全事件的监控和分析变得尤为重要。
本文通过构建安全防护日志管理系统,增强了安全监控的实时性,提升了网络安全感知能力。
未来还将收集应用系统、服务器日志等信息,通过更多维度的关联分析,结合科学算法,进一步完善分析手段和风险预警能力,为保障运营商网络信息安全提供支持。
[参考文献][1]饶琛琳.ELK Stack 权威指南[M].2版.北京:机械工业出版社,2017.[2]段娟.基于Web 应用的安全日志审计系统研究与设计[J].信息网络安全,2014(10):70-76.[3]冯立.基于粗糙集理论的安全日志分析模型[J].计算机工程,2002,28(11):164-166,182.[4]李晨光.UNIX/Linux 网络日志分析与流量监控[M].北京:机械工业出版社,2014.[5]杨秋翔.基于时间序列的多源日志安全数据挖掘仿真[J].计算机仿真,2019,36(2):297-301.收稿日期:2019-09-29作者简介:张延盛(1986—),男,江苏南京人,硕士研究生,工程师,研究方向:数据库与信息系统。
基于S7-1200PLC 的伺服电机运动控制系统设计李虹静(华中科技大学工程实训中心,湖北武汉430074)摘要:S7-1200作为西门子公司一款紧凑型PLC ,具有稳定性好、可靠性强的特点,同时还具备强大的运动控制功能。
现首先介绍了伺服电机运动控制系统的设计要求,然后针对台达B2系列伺服器工作特性,从台达B2系列伺服驱动器与西门子S7-1200PLC 的硬件设计入手,阐述了B2系列伺服驱动器参数调节的原理和步骤,最后通过在TIA 博途V15软件中对运动轴进行组态和编程,并利用S7-1200PLC 的PTO 功能实现了精准的运动控制。
关键词:S7-1200PLC ;伺服电机;运动控制;PTO1伺服电机运动控制系统概述1.1运动控制模型本伺服电机运动控制系统采用如图1所示的运动控制模型搭建,其中伺服电机由台达B2系列伺服器驱动,通过调节伺服驱动器参数以及编写PLC 程序,可实现包括距离控制、旋转角度控制、定位控制、路径控制以及闭环控制在内的多种运动控制实验[1]。
西门子840D数控系统参数优化分析与研究

西门子840D数控系统参数优化分析与研究发表时间:2018-08-22T11:11:40.733Z 来源:《电力设备》2018年第14期作者:宁家宝[导读] 摘要:随着工业生产技术的进步,复杂多平面、多曲面零件的精密性成为机械加工行业攻坚克难的关键技术,研制出高精度的数控机床是其最重要解决手段之一。
数控机床的数控系统控制参数的优化对机床的性能提高有着非常重大的意义,但系统参数优化一定要根据客观情况出发,尽可能最大限度的发挥机床的性能。
由于本公司搬迁且已投入使用的设备多为西门子840D数控系统,因此本文主要就西门子840D数控系统参数优化为课题进行分析探 (中国有色(沈阳)冶金机械有限公司沈阳市 110000) 摘要:随着工业生产技术的进步,复杂多平面、多曲面零件的精密性成为机械加工行业攻坚克难的关键技术,研制出高精度的数控机床是其最重要解决手段之一。
数控机床的数控系统控制参数的优化对机床的性能提高有着非常重大的意义,但系统参数优化一定要根据客观情况出发,尽可能最大限度的发挥机床的性能。
由于本公司搬迁且已投入使用的设备多为西门子840D数控系统,因此本文主要就西门子840D数控系统参数优化为课题进行分析探究,并提出一些个人观点,以供参考。
关键词:西门子840D;数控系统;参数优化; 1西门子840D数控系统的组成西门子840D是由数控及驱动单元(CCU或NCU)MMC,PLC模块三部分组成,由于在集成系统时总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起并用设备总线互相连接,因此在说明时将二者划归一处。
1.1人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:包括OP单元MMC,MCP三部分。
1.1.1MMC MMC实际上就是一台计算机有自己独立的CPU,还可以带硬盘带软驱;OP单元正是这台带有西门子MMC的控制软件的计算机的显示器。
我们常用的MMC有两种:MMC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾可以带硬盘。
基于西门子840Dsl系统的四轴同步运动控制实现
基于西门子840Dsl系统的四轴同步运动控制实现发布时间:2022-09-13T02:07:58.492Z 来源:《科学与技术》2022年第5月9期作者:张锦成杨万叶[导读] 在西门子840Dsl系统实现四轴同步运动控制的基础上,折边机滑块部件四轴曲柄连杆的位置-速度同步运动控制主要通过多轴龙门控制方案实现张锦成杨万叶广西玉柴机器股份有限公司广西玉林市 537000摘要:在西门子840Dsl系统实现四轴同步运动控制的基础上,折边机滑块部件四轴曲柄连杆的位置-速度同步运动控制主要通过多轴龙门控制方案实现。
本文结合西门子840Dsl系统的应用开发,对四轴龙门运动控制的实现进行了研究。
关键词:西门子840Dsl系统;四轴同步运动;控制当前,伺服同步控制技术是折边机和折弯机滑块控制领域的一个发展方向。
采用伺服电机通过减速器直接驱动滑块,与传统液压控制相比,具有更高的响应速度及控制精度,降低了传统液压系统的复杂性、能耗、噪声。
此外,由于常规电子齿轮运动控制的控制精度较低且难以实现,因此研究基于西门子840Dsl系统的四轴同步运动控制意义重大。
一、西门子840Dsl数控系统西门子840Dsl数控系统,采用一种开放式设计结构,不仅双乳应用于数控机床,也能应用于运动控制领域,通过系统本身强大的工业通讯网络,可设计成开环或闭,实现柔性生产。
840Dsl系统分成三部分: 1、HMI,人机交互。
主要由人机单元PCU、机床控制面板MCP,以及键盘鼠标、选配的触摸屏等组成,实现加工与仿真、数据管理、上位机通讯等。
2、控制、通讯系统。
主要有数控单元NCU、可编程控制器PLC,以及外围通讯模块、输入输出模块等,实现插补运算、运动控制、数字量模拟量控制等。
3、S120驱动系统。
主要由S120驱动系统、1FK系列伺服电机,具有节能、高动态、稳定可靠的进行轴向运动、插补等优点,另外,S120驱动系统可单独与其他西门子工业自动化产品组合,作为运动控制系统。
机电一体化第六章伺服驱动控制系统设计
钟。 F.体积小、自定位和价格低是步进电动机驱动控制的三大优势。 G. 步进电机控制系统抗干扰性好
上一页 下一页
二、 伺服驱动控制系统设计的基本要求
1. 高精度控制 2. 3. 调速范围宽、低速稳定性好 4. 快速的应变能力和过载能力强 5. 6.
闭环调节系统。
(4) ①
② 调节方法。
(5) ① 使用仪器。用整定电流环的仪器记录或观察转速实际值波形,电
② 调节方法。
上一页 下一页
六、 晶体管脉宽(PWN)直流调速系统
晶体管脉宽直流调速系统与用频率信号作开关的晶闸管系统相比,具 (1) 由于系统主电源采用整流滤波,因而对电网波形影响小,几乎不 (2) 由于晶体管开关工作频率很高(在2 kHz左右),因此系统的 (3) 电枢电流的脉动量小,容易连续,不必外加滤波电抗器也可平稳 (4) 系统的调速范围很宽,并使传动装置具有较好的线性,采用Z2
上一页 下一页
(2) ① A. 步进电动机型号:130BYG3100D (其他型号干扰大) B. 静转矩15 N·m C. 步距角0.3°/0 6°
D. 空载工作频率40 kHz E. 负载工作频率16 kHz ② A. 驱动器型号ZD-HB30810 B. 输出功率500 W C. 工作电压85~110 V D. 工作电流8 A E. 控制信号,方波电压5~9 V,正弦信号6~15 V ③ 控制信号源。
(3) ① 标准信号控制系统(如图6-16) ②检测信号控制系统 (如图6-17)
③ 计算机控制系统(如图6-18)
上一页 返 回
图6-16 标准信号控制系统图 图6-17 检测信号控制系统图 图6-18 计算机控制系统图
西门子840D SL安全集成功能在加工中心的应用

西门子840D SL安全集成功能在加工中心的应用吕刚【摘要】介绍了西门子840D SL数控系统外部触发的安全集成功能的基本知识和双通道概念.对其硬件单元Profisafe模块和S120驱动系统的功能描述、信号接入进行说明,利用框架流程图简介系统如何实现机床的安全集成功能.列举具体加工中心案例,设计机床应用外部触发的安全集成功能的实现步骤:硬件配置、参数说明、PLC与NC的SPL安全程序编程.【期刊名称】《柴油机设计与制造》【年(卷),期】2017(023)002【总页数】4页(P46-49)【关键词】安全集成功能;Profisafe模块;S120驱动系统;SPL程序【作者】吕刚【作者单位】上海柴油机股份有限公司,上海200438【正文语种】中文随着科学理论和应用技术的快速发展,机械产品外形越来越复杂精细,精度不断提高,性能越来越强,对其制造设备如加工中心的综合要求也是持续提升,加工中心的电气控制系统是其优劣的关键因素之一。
相比较而言,西门子公司840D SL数控系统是近年来综合性能最为先进优越的加工中心控制系统之一。
它能很好地满足机床用户的各种高标准要求,对生产现场的人机安全因素愈加重视的环境下,它更是有着良好的适应性和可靠性,西门子840DSL系统采用安全集成功能来实现人机的安全保障。
本文从便捷实用的角度,对安全集成功能的重点相关概念和在加工中心上的功能实现加以介绍。
本文讨论的安全集成系统包括硬件部分的Profisafe输入输出模块、S120伺服驱动单元,外围信号及接线,相关系列参数设置,NC程序和PLC程序的编程。
2.1 Profisafe输入模块F-DI输入模块安装在机床扩展单元ET200S插槽内,一般使用的都是4 F-DI模块,即4个信号输入点。
上文提过,安全集成功能的一个特征就是双通道信号状态监控:NC通道和PLC通道。
其在输入模块表现在每个信号输入分为NC输入点与PLC输入点,即每个信号分两路分别进入NC输入点与PLC输入点。
西门子611D驱动功能分析及故障诊断

如果 功率 模块 发生 故 障 , 那 么集 成在 内部 的半 导体 器件 ( 【 G B T ) 就 会有 反 应, 可 以通 过 电阻测 试很容 易地 检 测 出来 。 从 图0 4 可 以看 出驱 动模 块 中功率 单 元 的 工作原 理 , 功率 单元 实现 电源 逆变 主要靠 6 个I G B T晶体管 的导 通/ 关 断动 作 以及续 流二极 管的导 通 . 关闭驱动 的 电源 , 等 直流母 线放 电结束 , 断开 电机 的 连 接 端子 ( u2 、 v2 、 w2 ) 。 直流 母 线M6 0 0 、 P 6 0 0 上 把模 块 与其 他相 邻 的模 块 断 开。 用 万用 表的 正极 测试M6 o 0 端, 负极 测试 P 6 0 o 端, 如 图0 5 所示 。 万 用表 显示 的 两 个 二极管 的压 降值 大约 在0 . 7 V, 如 果 显示的 压 降值在 0 V或者大 于 2 . 2 V, 则 说 明模 块有 故 障 。 2 . 3 进驱 动模 块 常见故 障分析 2 . 3 . 1功 率模 块 故 障 公 司F KI I O  ̄控 机床 , 在 加工 的过 程 中出现 “ 2 5 2 0 1 ” 轴x 伺 服故 障报警 。 产 生故 障 的原 因有 多方 面的 , 如伺 服 电机 、 电缆 出现 问题 , 机 械 传动 部分 阻力过 大; 功率 模块 内部 故障等 等 。 首 先重启 机床 , 上 电完成后 没有 出现 报警 , 说 明模 块通过 了 自检 , 如有 报警 基本上 可 以肯 定是驱 动模 块损坏 。 第 二步 , 加上驱 动模 块 的使能 后 , 如果 马上产 生 报警 , 原 因主要 是伺 服 电机 、 动力 电缆 短路 或接地 ,
2 . 2 功率 单元 的检测 方 法
SINAMICS S210 伺服驱动系统样本
E86060-K4670-A101-B6-76001) SIMATIC HMI / 基于 PC 的自动化系统 操作与监控系统 基于 PC 的自动化系统 E86060-K4680-A101-C5-76001) 工业通信 SIMATIC NET IK PI ST 80/ST PC
E86060-K6710-A101-B8-76001) MD 10.1 SITRAIN 工业培训
E86060-K5710-A111-A5-76001) SIMOGEAR MD 50.1 减速电机 圆柱齿轮减速电机、平行轴减速电机、 锥齿轮减速电机、螺旋蜗轮减速电机以及 蜗轮减速电机 E86060-K5250-A111-A5-76001) 运动控制系统 SIMOTION 生产机械设备 E86060-K4921-A101-A4-5D00
Siemens D 32 · 12/2017 版
3
集成驱动系统
凭借集成驱动系统实现更快上市和更快盈利
SINAMICS 是西门子集成驱动系统的重要组件。SINAMICS 在提升工业生产 过程中的效率、生产率和可用性方面起着举足轻重的作用。 集成驱动系统是西门子对当今驱动与自动化技术所面临的极度复杂性挑战 而给出的指导性解答。全球唯一真正面向整套驱动系统的全面解决方案以 其三位一体的集成概念而著称:横向集成、纵向集成以及生命周期集成, 这些确保了每个驱动组件都能无缝集成到各个驱动系统、各类自动化环 境,甚至于设备的整个生命周期之中。 您将获得:一个从配置到服务的最佳工作流,达到更高的生产率、增效以 及更高的可用性。最终,集成驱动系统将显著缩短上市时间 以及盈利周期。
3
MOTION-CONNECT 接线系统
4
配置工具
5
服务与文档
6
西门子840D驱动系统使能控制及故障分析

脉 种使 能
控制使 能
电源控 制
图 3 外部使能控制 电路
或系统关闭按钮 ,在切断主电源前 ,应先操作这些 按钮 ,使系统 自动按规定的时序取消驱动使 能控 制 。不要 盲 目地 切 断 主 电源 ,否则 直 流 母线 能 量 可 能无法 释放 ,损 坏系 统硬 件 。
3 内部使能控制
l l
\ f 42、f 3I 64I 9
电 溽
厂_
KA3\I
48I 9
图4 电源模块使能控制端子 的连 接方 式
人制动状态 ,主轴和进给轴会迅速制动 ,并以最大 的加 速 度 停 止 ,延 时 一段 一定 的 时 间 t后 ,取 消 内 部控制使能 。当系统检测到所有轴均已经停止 , 就断开脉冲使能端子63,关断脉冲使能回路 ,再经 过一定时间 t时,断开控制端子 48,使直流母线进 入 放 电状 态 。如 果 在 轴 没 有 完 全 进 入 静 止 状 态 时 ,就断开端子 63和 48,取消使能信号 ,轴则 以自 由运动 的形式停车 ,就达不到理想 的制 动效果 。 直流母线完全放电大约需要几分钟 ,在安装或断 开 直流 母 线 时 ,一 定 要 确认 直 流 母线 是 否 完 全 放 完 电 。
16
机电技术
2014年 4月
西 门子 840D驱动 系统 使能控制及 故障分析
范 芳 洪
(湖南铁道职业技术学院 ,湖南 株 洲412001)
摘 要 :驱动系统是数控 机床的一个重要 的组成 部分 ,只有 驱动 系统上各 种使能信号正 常 ,数控机 床才能正常工作 。 文 中详细介绍 了西 门子 840D驱动系统使 能控 制的原理及外 、内部使 能的 PLC控 制逻 辑 ,在此基础上 阐述 了常见使能故障 的现象分析及解决方法 ,对 同行有一定 的参考价值 。
2024西门子S120驱动器入门教程CU320

西门子S120驱动器入门教程CU320•驱动器简介与基本概念•硬件安装与接线指导•软件配置与参数设置详解•运动控制功能实现目•维护与保养建议•总结与展望录01驱动器简介与基本概念它提供了广泛的功率范围和模块化设计,可灵活适应不同的机械和控制需求。
S120驱动器采用了先进的控制算法,确保了精确、快速和稳定的运动控制。
西门子S120是一款高性能的驱动器,专为满足现代工业应用而设计。
西门子S120驱动器概述CU320是S120驱动器的控制单元,负责驱动器的控制和通信任务。
它具有强大的处理能力和丰富的接口,可连接多种编码器和传感器。
CU320还支持多种控制模式,包括速度控制、位置控制和力矩控制等。
CU320控制单元特点西门子S120驱动器广泛应用于机械制造、印刷、包装、纺织等领域。
其主要优势在于高精度控制、快速响应、高可靠性和易于维护等方面。
此外,S120驱动器还支持多种现场总线协议,方便与上位机或PLC进行通信。
应用领域及优势分析驱动器控制单元编码器传感器相关术语解释一种电力电子设备,用于控制电机的速度、位置和力矩等参数。
一种测量装置,用于检测电机的位置和速度等参数。
驱动器的核心部件,负责处理控制信号和通信任务。
一种检测装置,用于检测电机的电流、电压、温度等状态参数。
02硬件安装与接线指导西门子S120驱动器CU320外观紧凑,结构坚固,适应各种工业环境。
接口丰富,包括电源接口、编码器接口、通讯接口等,满足各种连接需求。
驱动器面板上配有LED显示屏和按键,方便用户进行参数设置和故障诊断。
驱动器外观及接口介绍电源连接注意事项确保电源电压与驱动器额定电压相匹配,避免过压或欠压对驱动器造成损坏。
电源线应使用符合规格的电缆,并确保接线牢固、可靠。
对于大功率驱动器,应考虑电源线的线径和长度,以减小压降和温升。
编码器电缆连接方法01编码器电缆应使用屏蔽电缆,以减小电磁干扰对编码器信号的影响。
02电缆长度不宜过长,一般不超过50米,以减小信号衰减和干扰。
611U伺服报警说明
SIEMENS SIMODRIVE 611 伺服驱动系统故障诊断说明★下列故障与警告的说明对于“SIMODRIVE 611 universal”的所有软件版本都有效。
001驱动器没有操作系统原因:存储模块内没有驱动器操作系统排除:-通过SimoCom U加载驱动器操作系统-插装带有驱动器操作系统的存储模块确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)002计时溢出,Suppl. info:\%X原因:驱动处理器的时间计算不能再充分满足选用功能规定的循环时间。
补充信息:仅限于西门子系统内部错误的诊断。
排除:不使用如下大量费时的功能:-可变通讯功能(P1620)-追踪功能-以FFT方式启动或分析步进响应-速度前馈控制(P0203)-最小/最大存储(P1650.0)-DAC输出(最多1个频道)增加循环时间:-电流控制器循环(P1000)-速度控制器循环( P1001)—位置控制器循环(P1009)-嵌入循环(P1010)确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)003NMI预期监控,Suppl. info:\%X原因:控制模块上的监控计时器已经期满,其原因是控制模块在时间基准方面的硬件错误所导致。
补充信息:仅限于西门子系统内部错误的诊断。
排除:更换闭环控制模块。
确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)004堆栈溢出。
Suppl. info:\%X原因:违反了内部处理器硬件堆栈的限制或数据存储在软件堆栈的限制,其原因很可能是控制模块的硬件错误所导致。
补充信息:仅限于西门子系统内部错误的诊断。
排除:—驱动模块断电后通电—更换控制模块。
确认:接通电源反应:停止、STOPⅡ(SRM,SLM) STOPⅠ(ARM)005 非法操作程序编码、非法扫描,SWI,NMI(DSP)。
Suppl. info:\%X原因:处理器在程序存储器中发现非法命令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
135中国设备工程Engineer ing hina C P l ant中国设备工程 2019.08 (上)多年来,西门子公司一直在满足产品高品质需求的同时追求卓越,希望通过更优化的成本与更快速的产品投放速度占据机械设备市场,成为顶级机械设备制造商。
在当今机械设备制造产业中,兼具直观操作与高效组态系统建设已经成为大势所趋,所以结构紧凑、功能强大且易用的SINAMICS S210伺服驱动系统应运而生。
1 西门子SINAMICS S210伺服驱动系统简介1.1 产品基本情况西门子公司在2017年全新开发的SINAMICS S210伺服驱动器与SIMOTICS S-1FK2电机共同组成了一套完整的伺服驱动系统。
系统中就涵盖了5个功率等级,分布于50~750W 功率范围。
SINAMICS S210伺服驱动器整体集成了大量丰富的安全功能内容,能够实现快速工程组态,它主要通过Profinet 连接到上位控制器部分,较好地结合Web 服务器与一键优化功能实现了调试工作优化简化,可与Simotics 伺服电机配合使用,实现小负载状态下的高动态相应运动与中高负荷超精密运动。
在整个设计结构中,SINAMICS S210伺服驱动器与SIMOTICS S-1FK2电机相互之间只通过一根电缆连接,真正做到了简单连接结构承载丰富功能。
目前,西门子的这一全新伺服驱动服务系统已经被广泛应用于机械包装、物料抓取、木材陶瓷加工、数字印刷等重要加工服务领域。
1.2 产品外观图1为西门子SINAMICS S210伺服器驱动系统产品外观,其中左边为SINAMICS S210伺服驱动器,右边为SIMOTICS西门子伺服驱动系统分析周文(上海振华重工电气有限公司,上海 200125)摘要:在2017年4月的德国汉诺威工业博览会上,西门子公司发布推出了全新款的伺服驱动系统——适用于中高端应用的全新伺服驱动系统SINAMICS S210。
该系统同时搭载了SIMOTICS S-1FK2电机,具有集成安全功能强、工程调试快速的优势特点。
本文中将从产品外观、基本功能、技术参数以及典型应用等4个方面展开分析,全面剖析西门子的这一全新伺服驱动系统。
关键词:伺服驱动系统;西门子;SINAMICS S210;功能;典型应用中图分类号:TM921.541 文献标识码:A 文章编号:1671-0711(2019)08(上)-0135-02S-1FK2电机,整个产品外观造型与结构样式基本上与当前市面上的大部分同类产品类似,属于典型的单轴独立型伺服驱动器,其中每台驱动器都拥有自己相对独立的AC 电源输入接口和输出轴。
同时,它的正面接口布局中规中矩,上方黑色翻盖部分为显示操作面板,下方为系统的电机动力输出与编码器反馈部分,中部偏左位置为动力与控制电源输入部分,而中部偏右为通讯及I/O 信号端口。
整体来看,该伺服器驱动系统的设计布局相对平淡,但它其中只通过一根电缆连接系统中两大设备则相对特别,这是之前的伺服器驱动系统设计中所没有的设计尝试。
1.3 产品技术参数在发布SINAMICS S210伺服驱动系统以后,西门子也随即发布了该产品的系统技术参数。
首先是功率范围,系统中SINAMICS S210 S210伺服驱动器的功率范围包括2种,分别为1AC 230V,0.1~0.75kW ;SIMOTICS S-1FK2电机的功率范围为0.05~0.75kW 以及0.4~7kW 。
表1 六种颗粒阻尼减振效果类别减振效果类别减振效果颗粒A 1颗粒D 0.5颗粒B 1.2颗粒E 0.5颗粒C1.5颗粒F2从表1可以看出,试验结果表明,颗粒阻尼可以有效地降低泵组振动,其中颗粒F 减振效果最明显,可降低2dB ,最终机脚振级为111.8dB 。
4 结语综上所述,将原方案底座的上环和底环加厚,将支撑筋数量设计为5根,并将筋设计为空心圆柱结构,内部填充颗粒阻尼可以有效地降低泵组振动,其中选用3mm 钢丸减振效果最好,可以降低2dB ,最终机脚振级为111.8dB 。
参考文献:[1]陈世亮,董为勇等. 屏蔽泵的结构特点及关键技术[J].通用机械,2005(7):22-24.[2]郭昕. 屏蔽泵激励源与传递途径特性分析[D].哈尔滨:哈尔滨工程大学,2014.[3]鲁正,吕西林等. 颗粒阻尼技术研究综述[J].振动与冲击,2013,32(7):1-7.图1 西门子SINAMICS S210伺服驱动系统产品外观136研究与探索Research and Exploration ·工艺与技术中国设备工程 2019.08 (上)其次是扭矩方面,分别为1AC 230V 0.16~2.4Nm 以及3AC 400V 1.3~50Nm。
再者是通讯方面,该系统可被应用于PROFINET IRT、PROFisafe 以及PROFlenergy 等多个领域中,整体表现为通讯功能强大易用。
同时它目前还可被应用于Web server 以及Startdrive 调试工程中。
最后,该系统拥有电磁波过滤器,其中集成了1AC 230V class C2以及3AC 400V class C3两种形式。
在电机设计方面,系统采用了SPEED-CONNECT 快速锁定紧固件与紧凑可旋转插头设计,其中连接电缆可允许连接最长长度达到50m 。
电机设计中还采用到了典型控制器SIMATICS S7-1500T-CPU,其中就包含了高动态型地转子惯量(电机轴高20~63mm)以及紧凑型低等转子惯量(电机轴高30~100mm )。
另外,在电机选件方面采用到了抱闸、滑键、旋转轴封以及单圈及多圈编码器系统。
1.4 产品功能优势SIMATICS S210伺服驱动系统之所以能够获得德国设计大奖“红点”殊荣,是因为它在基础功能方面表现出了诸多惊艳之处。
(1)便捷化连接。
如上文所述,连接SIMATICS S210伺服驱动器与SIMOTICS S-1FK2电机的仅为一根OCC 电缆,该OCC 电缆中为动力电缆,同时兼顾编码器信号电缆与抱闸电缆功能,整条动力电缆直径仅为9mm ,并附带一个连接插头。
OCC 电缆横截面较小,相比之前西门子推出的伺服驱动系统的电缆更轻、更细、更灵活,这为整个系统的布线过程简化提供了较大便利。
相比传统牵引链导体,该系统的紧凑型单电缆连接将弯曲半径彻底缩小50%左右。
同时,它的连接插头采用到了坚固耐用设计,高度为25mm ,易转动且操作简便。
在电缆插头部分该系统专门设置了用户友好型自锁插头,该插头位于伺服驱动器正面的推进式终端位置,方便日常检修维护与拆卸,所以整体来看,其系统布线极其简单。
(2)简易化调试。
SIMATICS S210伺服驱动系统的整体调试简便,其中的电机与驱动器两部分都借助Webserver 与一键优化来实现系统调试过程简化。
具体来说,首先通过Webserver 调试无须安装任何软件,大幅度减少1/3调试时间。
而其调试界面则相当友好人性化,不但可显示内容丰富,易于轻松上手,而且还专门配置了一键优化功能,可实现控制参数自动优化,满足系统运行的诸多动态性能要求。
(3)安全性优化。
SINAMICS S210伺服驱动器集成了较为强大且多元的安全功能内容,它其中就包含了STO (安全转矩关断)、SS1(安全停止1)、STO 以及SS1等安全功能模块,它们都能通过PROFIsafe 执行模块功能内容,而其中的STO 更能通过端子启动,非常方便。
目前系统安全功能体系还在研发升级准备阶段,预计在以后还会展示更多的功能。
(4)高度动态控制。
SINAMICS S210伺服驱动器系统的电机轴部分可实现高度动态控制,它能够与系统中的典型控制器系统相互连接,完成从简单定位到复杂运动的整个控制过程,这一系列操作所采用的正是集成Web 服务器,在实现对驱动伺服器的动态调试以后,再通过一键自动优化功能展现不同机械负载状态下的动态系数,满足系统自动优化控制参数要求。
目前在系统中,它已经展示的集成安全功能就包括“安全扭矩断开”与“安全停止SS1”两项重要动态控制功能。
系统的高度动态控制,再配合伺服驱动器的快速采样功能、智能控制算法、高级编码器控制、低转子惯量与高过载操作等就能大幅度提高系统整体运动精度与动态性能。
目前系统可配置的电机类型较多,其中就包含了拥有20mm 、30mm、40mm 3种中心高度的伺服驱动系统电机。
2 西门子SINAMICS S210伺服驱动系统的典型应用简析SINAMICS S210伺服驱动系统是可投入于诸多典型应用生产工作环境中的,例如,它在包装机械、三坐标机械手搬运抓取、陶瓷、木工加工以及数字印刷等等领域都有广泛应用,这表现了它极强的生产应用功能兼容性。
2.1 集成运动控制与安全控制功能应用就以陶瓷、木工加工生产为例,SINAMICS S210伺服驱动系统就采用了集成总线通讯端口PROFINET IRT 中的以太网时钟同步功能进行加工作业实时动态控制,再配合上位运动控制器满足某些复杂动态同步控制功能。
在这里,西门子公司采用了相当成熟的SIMOTION CU 控制单元,可完美地配合兼容SIMATIC S7-1500典型控制器的T-CPU 核心控制部分。
除了合理运用到PROFINET 集成运动控制功能以外,系统还同时集成了安全控制PROFlsafe 与能源管理PROFlenergy 功能,两项功能可实现系统安全控制组件与系统本身的安全联锁连接,为提高陶瓷及木工生产加工安全水平。
对整个系统的运营及维护时间成本节约也大有帮助。
另外,借助系统所继承的PROFlenergy 功能,各个伺服轴的运控能耗分析数据也可得以有效整合,确保功能自然合理融入企业生产工厂与生产设备能源管理系统中,它可以帮助对企业生产设备一线运行底层产品元器件的能源使用状况集中分析、动态监控与精细化管理。
2.2 “一键式”整定功能应用SINAMICS S210伺服驱动系统的另一生产功能应用就是“一键式”整定功能应用,它基于整定运动控制系统特性合理调控复杂控制环参数,有效减少手动控制操作流程,只通过调试界面动态性操作技能形成一整套生产运动控制策略,确保系统在各项典型应用中都能自动完成控制环调整与运控特性参数有效优化。
在以前的西门子家伺服驱动系统中,是不具备“一键式”整定功能的,所以此次新系统加入该功能实属一大突破,它提高了伺服驱动系统在工业生产中的产品运控易用性,也相应提高了木工、陶瓷加工的生产安全性。
3 结语相比之下,这款SINAMICS S210伺服驱动系统与西门子公司所发布的V90 PN 在外观、功率段等方面极为类似,但在基本功能应用与典型应用方面有所强化,这为该产品给出了更高的市场定位。
目前,它已经被各个工业生产领域所广泛应用,体现了较高的系统功能应用价值,成为西门子家在机械设备市场的又一成功典范。