德国研制Shefex-2飞行器自主飞行控制系统
[新版]htv-2
![[新版]htv-2](https://img.taocdn.com/s3/m/3f790509c4da50e2524de518964bcf84b9d52d17.png)
从天而降的美国猎鹰——简介HTV-2高超声速滑翔飞行器作者:陈功发展全球快速打击武器一直是美国军事装备发展的目标,早在2001年布什政府就提出了全球快速打击战略,当时提出的目标就是发展一种能够携带传统武器在一小时内对地球上任何目标进行打击的武器系统,以应对朝鲜等国的导弹威胁。
2010年4月,美国海军将领James Cartwright在解释发展全球快速打击武器的原因时说:“今天,面对现有威胁,除非你动用核武器,(常规的武器反应时间)长达数天甚至数星期。
”美军对全球快速打击能力的需求十分迫切,以至于一开始就有人提出了一种将传统“三叉戟D5”潜射洲际弹道导弹换装常规弹头进行快速打击的替代方案。
但是由于此种方案容易引起俄罗斯、中国等国家导弹预警系统的误判,可能会引发核大战,因此该方案很快便遭到美国国防部的否决。
在全球快速打击战略的指导下,2003年6月美国国防部高级研究计划局(DARPA)和美国空军提出了高超声速飞行器的发展计划,简称全球猎鹰(FALCON)计划。
该计划的目标是研发、演示、验证从美国本土实施全球快速打击以及快速空间发射所需的技术,计划分为近期(2003-2010)和远期(2011-2025)两个阶段。
近期,FALCON计划主要是发展一种用来发射高超声速武器平台或将小型载荷送入近地轨道的小型化运载火箭(SLV)和以无动力滑翔的高超声速技术飞行器HTV。
远期计划是发展一种与飞机类似且能以Ma6以上速度飞行的高超声速巡航飞行器HCV。
按照HTV的技术发展路线,DARPA 提出了三步走战略,即分阶段发展HTV-1、HTV-2、HTV-3X飞行器,其中HTV-3X 是为了降低技术风险而在2007年增加的“黑雨燕”计划飞行器,目的是在HTV-1/2技术成熟以后,发展一种能在常规跑道起飞的战斗机大小的无人驾驶高超声速飞行器。
本着竞争和节省成本的原则,第一期HTV飞行器的概念开发和同被同时授予安德鲁斯太空公司、波音公司、洛克西洛·马丁公司以及诺斯罗普·格鲁曼公司等四家美国航空工业的巨头。
AMM介绍

AMM手册介绍该介绍主要以空客手册为主,MD82和MD90飞机的手册与空客手册基本内容一致。
1.概述飞机维护手册(AMM)是按照ATA 100规范编制的。
飞机维护手册含有正常在停机坪或者在维护机库中完成的,对飞机设备和系统的保养,修理,调节,检验和检查所需信息。
飞机以外设备所需的信息包含在厂家或者制造厂的部件维护手册中。
飞机维护手册也含有关于飞机结构的检查和维护的信息。
当然,结构的修理包含在结构修理手册或短舱结构修理手册内。
用于排除故障所必需的信息被包含在排故手册中。
飞机维护手册含有完成维护评审委员会(MRB)文件和相应维护计划资料(MPD)规定的定期维护程序所必要的数据。
手册中使用公制和非-公制测量系统。
在原来的参考文件里使用的度量衡单位数值先列出,然后在括号中换算成另一单位的量值。
客户代码和修订日期出现在每页的底部,修订日期可以是原版日期,修订日期或者最新版日期。
2.手册划分飞机维护手册分成各章节飞机概述章时限/维护检查 (5)尺寸和区域 (6)顶起与支撑 (7)校水平和称重 (8)牵引和滑行 (9)停放和系留 (10)铭牌和标志 (11)勤务 (12)飞机机体系统标准实施-机身 (20)通讯 (23)电源 (24)设备/装饰 (25)防火 (26)飞行操纵 (27)燃油 (28)液压源 (29)防冰和防雨 (30)指示/记录系统 (31)起落架 (32)灯 (33)导航系统 (34)氧气 (35)气动系统 (36)水/废水 (38)机载辅助电源 (49)结构结构 (51)舱门 (52)机身 (53)短舱/吊架 (54)安定面 (55)窗 (56)机翼 (57)动力装置标准实施-发动机 (70)动力装置 (71)发动机 (72)发动机燃油和控制 (73)点火 (74)空气 (75)发动机操纵 (76)发动机指示.......................... . (77)起动 (80)2.1章节划分规则每个章/系统细分成节/子系统(结合功能/自然组)。
浴火凤凰——且看无人机的前世今生

浴火凤凰——且看无人机的前世今生作者:海翼来源:《科学24小时》2012年第10期无人机的诞生最早可以追溯到1917年,但无人机的发展远不如它的兄长——有人驾驶飞机那样轰轰烈烈,风风光光。
军事爱好者一提起有人驾驶飞机,诸多型号均可如数家珍,但无人机却一直鲜为人知,在近百年航空装备发展的历史长河中,它曾遭遇几起几落,历经坎坷。
无人靶机开创先河任何一种武器装备的发展都离不开战争这个舞台,都要为作战服务。
1917年,美国的斯佩里和寇缔斯一起对一架有人驾驶飞机进行了改装,目的是要将它改造为无人驾驶鱼雷攻击飞机。
经过改装后,该机在长岛空军基地进行了数次试飞,但由于军方提出的作战指标太高,就当时的航空技术发展水平而言根本达不到。
军方一看这种情况立即停止投资,所以这架无人驾驶鱼雷攻击机被搁置在襁褓之中。
这一放就是16年,期间再也无人问津。
1933年,英国费尔雷公司将一架“女王”双翼飞机改装成无人驾驶靶机并投入实际使用。
从此,无人驾驶飞机作为靶机被载入航空史册,并开始在靶场上担当重要角色。
英、美和前苏联等主要国家都研制了大量用做靶机的无人机,使它成为无人机家族中的一个重要成员。
此后不久,美国的航空专家雷金纳德·德里为美国陆军研制出了供打靶用的无线电遥控机。
1939年,美国又研制出了一种上单翼无人机,取名为RP—4。
1941年,珍珠港事件爆发。
因战事所需,美国陆、海军开始大批订购靶机,其中OQ—2A 靶机984架、OQ—3靶机9403架、OQ—13 靶机3548架。
后两种靶机均安装上了大功率的发动机,飞行速度可达每小时225千米,飞行高度达3000米。
在第二次世界大战中,美国陆军航空队曾大量使用无人靶机,并在太平洋战场上使用过携带重型炸弹的活塞式发动机无人机对日军目标进行轰炸。
从上世纪50—70年代,世界上研制无人靶机的国家增加到20多个,发展了上百种基本型,生产数量超过2万多架。
一种导弹的研制与定型,需要多种无人靶机进行鉴定试验。
四旋翼无人机设计

3 四旋翼无人机硬件系统设计 ......................................................................................... 9
3.1 微惯性组合系统传感器组成 ............................................................................... 9
3.1.1 MEMS 陀螺仪传感器................................................................................ 9
3.4.2 电机和电机驱动模块 ............................................................................. 12
3.4.3 机架和螺旋桨的选型 ............................................................................. 13
4.1.2 PID 控制算法设计 ................................................................................... 17
5 飞行器试验 ................................................................................................................... 19IIFra bibliotek目 录
Su-27 DCS Flaming Cliffs Flight Manual CN

苏-27 的 41 项纪录................................................................................... 17
先进前线战斗机......................................................................................... 2
从 T-10 到 T-10S ..................................................................................... 10
简介 ........................................................................................................ VI
SU-27 历史 ............................................................................................... 2
开始服役 ................................................................................................ 19
总体设计 ................................................................................................. 22
亨舍尔 Hs129 B-2
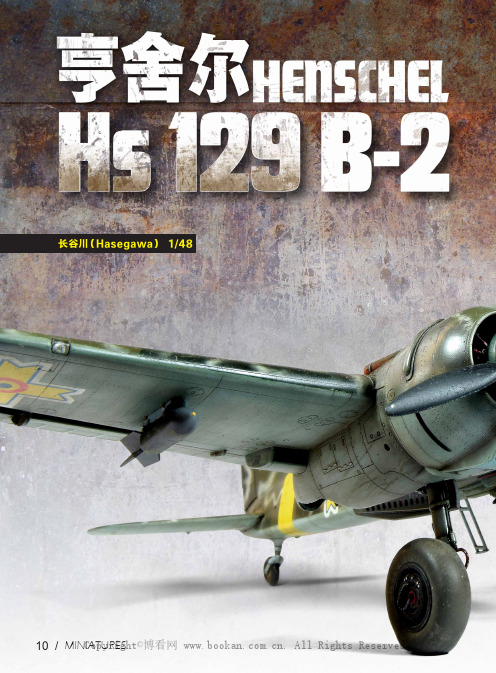
长谷川(Hasegawa) 1/48Copyright©博看网 . All Rights Reserved.10 / MINIATURESA n i s E lB i ed 罗马尼亚空军的力量。
1943年5月,部署在普洛埃斯蒂附近塔尔格索的罗马尼亚皇家空军(AAR)第8战斗机联队被改造成第8攻击机联队,并奉命装备亨舍尔Hs129B-2。
这支部队由三个中队(第41、42和60中队)组成。
1943年夏天,罗马尼亚人开始在乌克兰前线执行飞行任务。
本文还原的飞机是1944年1月11日在乌克兰莱佩蒂卡坠毁的第42中队的亨舍尔Hs129B-2,机身编号为Nr.140809,飞行员Alfred Conrad 上尉在事故中丧生。
值得一提的是,这架标记着“黄色120”的飞机在经其它飞行员驾驶时又发生了一次着陆事故,之后在1943年被修复完毕。
长谷川(Hasegawa)的套件并非最近的新品,事实上它已经有20年历史了。
但作为还原实机的基础套件,质量上仍旧可圈可点。
该模型需要一些自制工艺来改进。
我用一些废塑料和铜丝来加细发动机和起落架,用于装载和释放SC50炸弹的挂架也需要进行自制改造,原因是该套件并未提供安装在罗马尼亚空军飞机上的特殊挂架。
套件组合度堪称完美。
考虑到套件已颇有年头,表面细节也还算差强人意,不过还是要自行刻制成排的铆钉。
为此,我用小号手(TRUMPETER)出品的铆钉制作器来进行。
在这个过程中,我发现长谷川的塑料偏硬,导致制作过程比想象的更加困难。
对于迷彩样式的选择,我最后决定喷涂冬季伪装色,这是以标准的RLM65/70/71三色迷彩作为主色,机身上部覆盖着白色条纹,这种样式的涂装比较原始。
希望大家喜欢这件作品并从中撷取一二有用的信息。
Jean-Baptiste Saillant 为本文提供的建议、帮助和各种资料。
MINIATURES / 11Copyright©博看网 . All Rights Reserved.散热器进气口的背板。
德国研制Shefex-Ⅱ锐边航天器
l
吝 0 4
脚
一
_ ■i 一 = - i :l I 一 l
_ _
..一
2 O
● _■ ! I ■ i ■ — ■ ● -
I I I 1
成化 。与传统 反作 用 飞轮 控制 器 相 比, 控 制器 的 该 电路体 积和 可靠性更 优 , 系统可灵 活配置 , 且 能在不
于澳大利 亚伍默 拉沙漠 发射场升 空 , 进行 首次返 回大气 层 的测试 。 ( 择) 肖
Js e o :Xin mp n ,2 0 . l xCo a y 0 4 i
辩9 翥 9 . 5
9 . 9O
[] Xin o a y i o l epoesr e rn eg i 2 l xC mpn .M c Ba rcso f ec ud i r z re e ( . ) M] a o ’ : in o ay 0 4 V4O [ .S nJ se Xl xC mpn ,20 . i [3 谭积 洲 ,郭 3
上 海 航 天 AE S A E S RO P C HANGHAI
21 0 0年第 3期
8 0 6 o
I
I
I
●
I 一 I
4 结 束 语
本文介 绍 了一 种 使 用 Mi o l e软 核设 计 的 c Ba r z 反作用 飞轮 控制器 , 在一 片 F G 内集 成 了多 片专 P A
图 7 反 作 用 飞 轮转 速
Fi . Ro a i p e fr a to e l g7 t ton s e d o e c i n wh e
[ ] 杨强浩.基于 E K的 F GA嵌入式系统开发[ .北 4 D P M]
德国研制Shefex-2飞行器自主飞行控制系统
S lt ] ̄l ' s J
更 强 的鲁 棒性 、更 好 的 实时性 以及 处 理参 数不 确定 性 的能 力 。导弹 在整 个 飞行 过程 中 ,无 需切 换 自动驾 驶 仪 的增 益 ,就 可 以实 现稳 定飞 行 且满 足一 定 的性能 指
图 5
综 合 自动 驾 驶 仪 时 的 过 载 阶 跃 响 应
D yeJ A a s ff d ak s s m i t cue n e a t sC . ol C. n l i o e b c t sw t s u trdu cn i i 【 ] ys e ye h r ne I E rc e ig a 1 8 . 2 ( )2 52 0 E E P o edn s nD. 9 2 1 96: 4 —5 . P
t n f r t n ,mu i i t e e n r s n d rxma i ess ] r s ma o s a o i lp c i smi m ,a a i t n re[ . t l av o o e v J
I E r sci s n tmai C nr l1 8 , C 2 () E E T a a t n o t o t , A 一 62. n o o Au c o 91
标。
参
考
文
献
陈 佳实 . 弹制 导控 制系统 分析 与设 计[ . 京 : 导 M] 北 宇航 出版 社, 99 18.
Z me G. F e b c a d o t a s n i v t a s edak n pi l e s ii m t y: mo e r f r n e d l e ee c ,
未来飞行器之回到未来
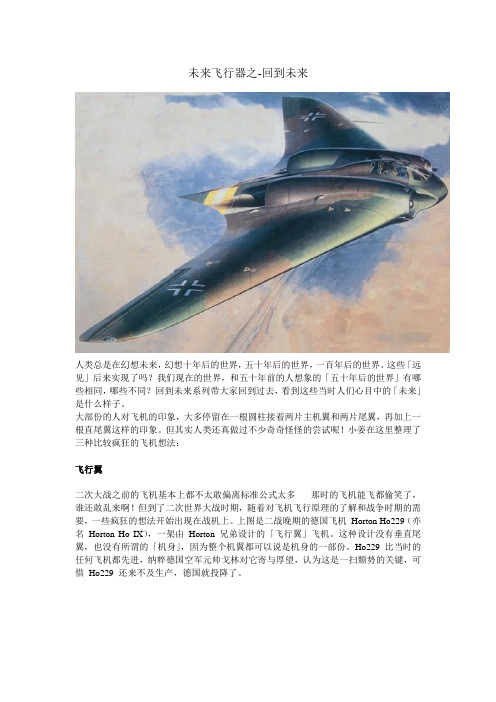
未来飞行器之-回到未来人类总是在幻想未来,幻想十年后的世界,五十年后的世界,一百年后的世界。
这些「远见」后来实现了吗?我们现在的世界,和五十年前的人想象的「五十年后的世界」有哪些相同,哪些不同?回到未来系列带大家回到过去,看到这些当时人们心目中的「未来」是什么样子。
大部份的人对飞机的印象,大多停留在一根圆柱接着两片主机翼和两片尾翼,再加上一根直尾翼这样的印象。
但其实人类还真做过不少奇奇怪怪的尝试呢!小姜在这里整理了三种比较疯狂的飞机想法:飞行翼二次大战之前的飞机基本上都不太敢偏离标准公式太多-- 那时的飞机能飞都偷笑了,谁还敢乱来啊!但到了二次世界大战时期,随着对飞机飞行原理的了解和战争时期的需要,一些疯狂的想法开始出现在战机上。
上图是二战晚期的德国飞机Horton Ho229(亦名Horton Ho IX),一架由Horton 兄弟设计的「飞行翼」飞机。
这种设计没有垂直尾翼,也没有所谓的「机身」,因为整个机翼都可以说是机身的一部份。
Ho229 比当时的任何飞机都先进,纳粹德国空军元帅戈林对它寄与厚望,认为这是一扫颓势的关键,可惜Ho229 还来不及生产,德国就投降了。
飞行翼阻力小,载重量大,但是出了名的不稳定。
二战期间,美国也有Northrop 公司在研究飞行翼的设计,并早在1942 年就提出了一架大型飞行翼轰炸机的设计(上图左)。
这架暂名为XB-35 的飞机从试飞之初就引擎问题不断,再加上当时喷射引擎看起来比较有前途,因此B-35 在生产两架后就停飞了。
此时美国对飞行翼仍保有相当程度的兴趣,因此其中两架B-35 的半成品被改装成使用喷射引擎的YB-49(上图中)继续测试。
B-49 的表现比B35 好很多,但这次是受限于机身设计的速度上限,也没办法发挥飞行翼的功效。
最后在一架测试机坠毁后,美国放弃了B49 的研发。
或... 真的放弃了吗?1979 年美国又重启了「先进科技轰炸机」的秘密计划,发展一台「隐形」的轰炸机。
2013年世界高超声速飞行器发展总结[1]
![2013年世界高超声速飞行器发展总结[1]](https://img.taocdn.com/s3/m/582a086725c52cc58bd6be63.png)
础技术,而不像美国一般重点关注武器技术发展, 飞行器设计用来搭乘 300 名乘客,ZEHST 可以搭载
如图 3 所示。
60 名乘客,飞行器的质量、尺寸等远超美国当前高
欧洲长期以来在单 /双级入轨领域的研究是有 超声速飞行器水平。
目共睹的,进入二十一世纪,欧洲主要有 SKYLON、
与 LAPCAT 用途相似的 ZEHST 项目于 2011 年
该项目目前状况不明,仅在一些航展中展示过 飞行器模型。此外,俄罗斯与印度联合研制的布拉 莫斯-2 高超声速导弹与该飞行器外形有较多相似 点,因此,该项目的研究成果有可能用于支撑布拉 莫斯-2 的研究。 1. 4. 2 巴西 14-X 项目
俄罗斯在 2012 年夏天完成
了高超声速导弹与载机挂架的分
离试验,此次试验并非真正意义
上的发射试验,而是弹机分离试
验。试 验 中,导 弹 从 载 机 上 分 离,发动机点火,以亚声速飞行
图 3 欧洲高超声速飞行器项目与技术发展规划
数千米并着陆。试验的目的是验证导弹在飞行中的 程较小,不能携带乘客,目前有大飞机翼下挂载和
飞航导弹 2014 年第 2 期
本期特约
近 10 年。然而,随着俄罗斯国力
的衰落,当时的高超声速技术研
无人机传输系统用户手册说明书
多旋翼专业级无人机使用手册专注应急通信,持续引领创新版权所有不得复制目录一、免责声明 (3)二、无人机—飞行器 (4)2.1、无人机组成 (4)2.2、无人机接口图示 (6)2.3、挂载安装 (7)三、无人机—智能遥控器 (8)四、挂载介绍 (10)4.1无人机—变焦云台(30倍) (11)4.2无人机—机载喊话器 (14)4.3无人机—抛投器 (19)4.4无人机—探照灯 (21)4.5无人机—锂聚合物电池及电池充电器 (23)五、智能遥控器使用说明 (28)六、飞行安全 (36)七、起飞准备 (38)7.1.静态检查 (38)7.2.安装电池及起落架 (38)7.3.安装挂载 (40)7.4.安装机臂 (40)7.5.参数检查 (41)7.6.挂载控制 (45)八、无人机起飞 (46)九、飞机降落 (48)十、常见问题解答 (48)十一、法律法规 (49)售后服务 (50)一、免责声明危险首先感谢您使用慧明捷科技有限公司无人机设备。
它融合了高科技精华、外观精美、图传覆盖面积广。
希望它能给您的工作带来无限的便捷。
在使用无人机图传设备前,请仔细阅读本须知,一旦使用即被视为本声明内部已经全部认可与接受。
请严格遵守用户手册安装和使用该产品。
特别声明:由于本产品新手操作,十分危险。
飞行员必须经过慧明捷科技有限公司的培训,并且在考核通过之后才能操作。
在未通过考核便擅自操作的情况下所造成的损害或损伤,慧明捷科技有限公司将不承担相应的损失及赔偿责任。
警告请把电器部件放在儿童触及范围之外;确保飞行器飞行时远离人群及危险物品,建议您在专用的飞行场地飞行;切勿在饮酒、疲劳或其他精神状态不佳的情况下进行任何操作;请严格按产品手册进行操作;飞行前请确保供电系统及其他功能模块连接正确,否则可能造成设备的烧毁;遥控器通道校准、固件升级、参数设置前请关闭动力电源或取下螺旋桨,防止电机突然高速旋转;切勿在恶劣环境下飞行;请勿改变机架的结构,如改变,后果自负1.本产品为特殊控制物项,用户将为使用本产品的一切行为负全部责任,对于直接或间接使用本产品造成的后果厂家不承担任何责任。
基于STM32单片机的无人机飞行控制系统设计

最后,展开无人机的试验研究,验证了飞行控制系统硬件与捷联导航算法的可靠性和可行 性。 关键字:无人机,捷联导航,四元数,卡尔曼滤波器,飞行控制
(保密的学位论文在解密后适用本承诺书)
作者签名: 日 期:
南京航空航天大学硕士学位论文
摘要
本文从工程应用出发,将航模固定翼飞机作为研究平台,在总结国内外微小型无人机飞行 控制系统设计的基础上,提出了低成本飞行控制系统设计方案。
首先,提出飞行控制系统总体方案,对硬件系统进行了详细设计。无人机硬件系统总体分 为两个部分:机载飞控系统和地面测控系统,其中机载飞控系统以 STM32 微控制器为核心,集 成了数据采集系统、GPS 模块、遥控解码模块、舵机驱动模块、数传电台和电源模块;地面测 控系统包括测控计算机、数传电台、地面站软件、发射机等。
中图分类号:TP2-S177
硕士学位论文
基于 STM32 单片机的无人机飞行控制 系统设计
研究生姓名 学科、专业 研究方向 指导教师
胡
庆
飞行器设计
无 人 机飞行控制
宋彦国 副教授
南京航空航天大学
研究生院 航空宇航学院
二 О 一二年三月
Nanjing University of Aeronautics and Astronautics The Graduate School
Secondly, strapdown navigation algorithm is researched. It's the key technology to an UAV system. The error quaternion based attitude Kalman filter is developed in this paper. Considering influence of rigid acceleration, the combined filter is designed to improve the precision of estimation. The simulation test shows good performance of this navigation algorithm. The velocity and position Kalman filter is designed by using of GPS signal.
仿生扑翼飞行器
仿生扑翼式飞行器2013年9月7日摘要随着航空技术的发展,微型与小型飞行器以其灵活轻便、成本低廉等优点受到研发者的青睐。
相对于大型固定翼、旋翼飞行器,微、小型扑翼机在低空探测、突然袭击、认知搜救、城市作战等方面有着无法比拟的优势。
微、小型扑翼飞行器尚处于初期研发阶段,目前均以仿生学为基础,多数模仿蜻蜓、蜜蜂等昆虫的扑翼原理,而对仿鸟类扑翼飞行器的研究涉及甚少。
鸟类较昆虫有更强的环境适应能力,尤其是恶劣气候环境,且鸟类具有一定量的载重能力,方向调节性能更佳。
该项技术并没有进入实用化阶段,我们有幸成为探索者之一。
在这个项目中我们不一定能做出一架高性能的扑翼机来,但我相信这一定是一个很有启发意义的探索。
关键词:仿生,仿鸟,扑翼机,小型飞行器AbstractWith the development of aviation technology, the micro and small vehicle with the advantages of flexibility, portability and low costhasgained R &D’s pare to the large fixed wing aircraft androtorcraft, microandsmall ornithopter has incomparable advantages in terms of low altitude detection, surprise attack, cognitive search and rescue, andcity operation. Micro, small ornithopter is still in the initial stage of development, currently basesonbionics flapping theory. Most ornithopters imitate dragonfly, bees and other insects, with study of ornithoptersimitatingbirdslittle involved. Birds have a stronger ability to adapt to the environment, especially the harsh climate, andtheircontrol performance is betterthan insects. Moreover, the birds have a certain amount of load capacity.As the technology has not entered the practical stage, we are honored tobecome one of the explorers. In this project, we may beunable to make a high performance aircraft, but I believe that it must be a very instructive exploration.Key words:Bionics, Bird-imitation, Ornithopter, Small aircraft目录目录 (iii)第一章绪论 (1)1.1选题背景 (1)1.2研制重点难点 (2)第二章国内外研发状况 (6)2.1国外研发状况 (6)2.2国内研究情况 (12)第三章作品设计论述 (15)3.1创意构想及三维模型制作 (15)3.1.1概述 (15)3.1.2翅膀扑打运动的实现机构 (15)3.1.3二级齿轮减速器 (17)3.1.4翼型 (19)3.1.5翅膀的扭转 (20)3.1.6尾翼 (20)3.2内部电路 (21)3.2.1电源部分 (21)3.2.2直流电机 (21)3.2.3舵机 (22)3.2.4控制板 (22)第四章应用前景 (24)4.1特点 (24)4.2应用前景 (24)结论 (26)参考文献 (27)致谢词 (28)附录 (29)图1亚氏悬挂式滑翔机外观图 (6)图2亚氏悬挂式滑翔机人类进行飞行示意图 (7)图3亚氏悬挂式滑翔机机构简图 (7)图4史氏玩具飞机扑翼结构 (8)图5史氏玩具飞机机构简图 (8)图6D ELAURIER拍扑机 (9)图7昆虫胸腔剖面示意图 (9)图8麦氏扑翼机扑翼机构 (10)图9麦氏扑翼机机构简图 (10)图10肯式扑翼机扑翼机构 (11)图11肯式扑翼机机构简图 (11)图12M ADANGOPAL微扑翼机构 (12)图13詹秀玲飞鸟玩具整体构造图 (13)图14詹秀玲飞鸟玩具扑翼机构 (13)图15詹秀玲飞鸟玩具机构简图 (13)图16两自由度胸腔式扑翼驱动机构简图 (14)图17压电驱动的仿生微扑翼机构 (14)图18创意整体三维概念模型 (15)图19翅膀扑打运动的实现机构 (17)图20二级齿轮减速器 (18)图21齿轮减速局部视图 (19)图22翼型 (20)图23尾翼 (21)图24舵机控制板外形 (22)图25控制软件 (23)第一章绪论1.1 选题背景我们处在高科技时代,科技文明迅速发展,市面上诸多商品都朝轻、薄、短、小的目标迈进,如手机、随身听、电脑等等,当然应用于军事上的微型飞行器亦是如此。
鹰从夜间起飞:二战德国夜间防空战简介
鹰从夜间起飞:二战德国夜间防空战简介德国本土的防空工作,除了重要设施和大城市由专门的高炮部队负责外,其他的都交由夜间战斗机部队负责。
德国夜间战斗机兵种中将约瑟夫·卡姆胡伯建立起了一套夜间防空体系,被称为“卡姆胡伯防线”。
该防线约有1000公里长,北起丹麦,南至法国东部,主要构成是雷达、夜航飞行观察机、高炮群和夜间战斗机部队,整个系统由密布的电话网络并联,便于指挥调度。
德国夜间防空体系的指挥调度室夜间拦截模式亮带夜间拦截“Henaja(Helle Nachtjagd)”该模式适用于石勒苏易格-荷尔斯泰因州,经汉堡,不来梅,鲁尔区至梅茨一线夜间明亮的灯光带一线,通过与航向侦听器(Horchger?ten)并联的探照灯群发现目标,空中待命的夜间战斗机通过机载雷达或地面探照灯群的指示接近敌机群,攻击敌机。
由于工业区上空的云层覆盖很少会低于60%,因此亮带拦截的模式的拦截效率还是比较高的。
1940年10月,德国第一种雷达维尔茨堡A型服役,进一步降低了夜间防空拦截的难度。
因此盟军轰炸机群只有在距“亮带”35公里近处从高空俯冲,或从南、北方向迂回至该地区,才有可能避开亮带拦截网的拦截。
远程夜间拦截远程夜间拦截由两个(后增至三个)装备了Ju 88 C-2、C-4和Do 17 Z的夜间战斗机中队执行,这些夜间战斗机在尽可能避免被敌方发现的前提下接近英国本土机场或盟军方面认为相对安全的空域,在此对返航或来航的盟军轰炸机群进行攻击。
但这种拦截方式成功率很低,因为德军无法预知盟军轰炸机群的确切位置和到达时间,并且1941年8月起德国空军已不堪重负,无法腾出油料和装备进行这种撞大运式的拦截,此后仅有I.N.J.G.2在西西里和北非继续这种作战方式,而在西线德国空军将注意力更多地集中在了攻击英国机场上。
由于战略上的转变,德国技术部门放弃了在机载雷达方面的研究,按照卡姆胡伯中将的个人观点,这是德国高层在战争期间“最致命的失误”之一。
高速飞行器气动热辐射效应分析与计算毕业设计论文
高速飞行器气动热辐射效应分析与计算摘要高速导弹光学窗口外存在激波层,为高度不均匀的梯度温度气体介质,针对其中的热辐射传递开展一种有效数值求解方法研究,基于离散传递法的思想,利用光线传输模型寻找导引头探测口径内的视线路径,推衍出激波层的热辐射强度计算模型,并且求出结果证明在一定红外波段内,激波层热辐射噪声在大气层内受飞行高度影响很小,与马赫数关系密切。
本文建立了物性分布高度不均匀高温气体介质的热辐射计算体系,可以为直接或间接需要此计算结果的工程军事场合提供参考。
关键词:红外成像制导,气动热辐射效应,辐射传递方程,分子原子光谱High-speed aerodynamic analysis and calculation of the thermalradiation effectsAbstractThe presence of foreign high-speed missile shock layer optical window for the highly uneven temperature gradients gaseous medium, for which the thermal radiation transfer research an efficient numerical solution method, based on the idea of discrete transfer method, the use of light transmission model looking seeker caliber within sight path detection, inferring the thermal radiation intensity of the shock layer model, and the results obtained prove that in a certain infrared wavelengths, the shock layer by thermal radiation noise has little effect altitude in the atmosphere, and Mach several closely related.This paper established a highly uneven distribution of physical properties of high temperature gas medium heat radiation calculation system, which can be directly or indirectly Then you need this military occasions engineering calculations provide a reference.Key words: infrared imaging guidance, pneumatic heat radiation effects, radiative transfer equation, molecular atomic spectroscopy目录摘要 (1)1研究的目的背景与意义 (5)1.1气动热辐射效应相关研究的发展现状及研究目的 (5)1.2国外发展现状 (6)1.2.1高温气体热辐射特性研究 (6)1.2.2高速飞行器气动热辐射效应 (7)1.3国内发展现状 (8)2 气动热辐射效应相关概念 (9)2.1 高速飞行器气动热辐射效应的概念 (9)2.2辐射传递方程的一般形式 (10)2.3几何光学光线追迹模型 (12)2.3.1 正入射光线传输 (12)2.3.2斜入射光线传输 (13)2.4量子热辐射的基本概念 (15)2.5气体中光的发射、吸收机制 (16)2.6气体吸收发射系数的计算 (18)3气动热辐射效应分析与计算 (19)3.1高温气体分子原子辐射吸收系数 (19)3.1.1多级温度模型建立 (20)3.2高温气体原子分子辐射吸收系数 (23)3.2.1高温气体原子辐射吸收系数 (23)3.2.2高温气体分子辐射吸收系数 (25)3.3光学传输模型 (25)3.3.1介质离散 (25)3.3.2光线追迹 (26)3.4辐射传递方程求解 (28)3.4.1辐射传递轨迹 (28)3.4.2离散传递法 (29)3.5计算结果与讨论 (30)4 结论 (32)参考文献 (33)致谢 (34)1 研究的目的背景及意义1.1高速飞行器气动热辐射效应相关研究的目的及意义自从上世纪六十年代,尤其是近二十年以来,激光技术和航空航天技术的发展,以及机载激光、战术高能激光武器、激光雷达、激光通讯、大气光学测量等大量技术应用展现出来,使人们开始关注光在大气、湍流层、附面层等复杂流场中传输的规律研究。
二战时期的一些黑科技(战斗机,轰炸机和直升机)
二战时期的一些黑科技(战斗机,轰炸机和直升机)战斗机:一、Me262喷气战斗机(德国)研发背景:Me-262“飞燕”是德国梅塞施密特飞机公司在二战末期为德国空军制造的一种喷气战斗机。
该机于1944年夏末首度投入实战,成为人类航空史上第一种投入实战的喷气机,与同一时期英国制造的流星式喷气战斗机(Gloster Meteor)齐名。
性能简介:由于德国被不断轰炸,所以Me262生产都被移到一些不起眼的工厂中进行,有时甚至在树林中生产。
德军也开始建设一座巨大和受到严密保护的地底工厂,让Me262生产能够不受轰炸影响,无间断地进行,但到战争结束时仍未建成。
除了德国以外,因为轴心同盟关系因此德国对日本提供了Me262的设计图,日本获得之后制造出“橘花”攻击机和“火龙”战斗机,但直到日本战败投降为止并未服役。
技术参数:空重:3800千克;类型:单发单座喷气战斗机;武器装备:30毫米MK108机炮×4;发动机:Jumo004B-1发动机;最大速度:870千米/时;最大航程:1050千米。
二、He162喷气战斗机(德国)研发背景:He162战斗机是德国于二战时第二架量产的喷射战斗机,期望以简单的设计大量生产,配合低飞行训练时间的飞行员拦截美国的轰炸机群,因此又有“国民战斗机”的昵称,参与了“火精灵”计划。
第一架原型机He162V1于1944年12月底以前试飞,而第一批1000架将于1945年4月生产完毕,同年5月时每个月的产量要提升至2000架。
1945年3月26日1架由飞行员格哈德驾驶的He162遇上1架落单的英军“台风式”战斗机,但由于方向舵故障而未能把其击落。
性能简介:飞机的重量很轻、结构简单、尺寸较小。
机身为钢管构架,外蒙铝皮;机翼除以55度下反的翼梢外,均为木质结构,垂直尾翼和水平尾翼也为木质结构;但装备了当时罕见的弹射座椅,以避开发动机进气口逃生;采用前三点式起落架。
技术参数:空重:1750千克;类型:单发单座喷气战斗机;武器装备:20毫米MK151机炮×2;发动机:BMW003E-1发动机;最大速度:890千米/时;最大航程:620千米。
德国投资研发宇宙飞船返航技术

德国投资研发宇宙飞船返航技术
作者:暂无
来源:《创新科技》 2012年第4期
科学家们几十年来为各种不同的意图研发空间运输系统。
未来的宇宙飞船不仅可以安全进
入轨道,也能够顺利返回地球。
宇宙飞船、载人探测器等返回的前提是再入技术的发展。
德国赫姆霍茨研究联合会为此向
联合课题“SHEFEX/REX”投资900万欧元,用来扩展再入技术的研究,同时也为欧洲与德国航
天工业的创新建立基础。
再入技术研究需要综合运用空气动力学、材料科学、热保护系统、导航、航空电子设备、
飞行控制、系统分析、飞行操作方面的专业知识,而赫姆霍茨研究联合会下属的德国航天航空
中心具备所有的条件。
试飞的飞行器来自“REX FREE Flyer”规划,其飞行器的外壳与宇宙飞船传统的圆润型相反,呈有棱角的多平面式。
这种形状的外壳据称有两大优势:能大大降低成本和改善空气动力;通常的弧形隔热板须全部采用曲面磁瓦,而针对平面只需铺设平面磁瓦,这样自然要简单很多,而多平面式还可改善空气动力性能;另外REX飞行器具有新型热保护与控制技术,这些技术正
是再入飞行器所需要的。
“REX FREE Flyer”规划的核心是研发新型、返回式航天器技术,德国航天航空中心在此
中承担着研发任务。
中心拥有一架小型航天器,自2020年始将用于失重状态下的返回试验。
在下一次试飞中,REX 式样的飞行器将以缩小的形状进行试飞。
《多旋翼飞行器:从原理到实践》ch02系统基本组成 教学课件

系统基本组成
工业和信息化部“十四五”规划教材 多旋翼飞行器:从原理到实践
01 总 体 介 绍
(1)信息流动
多旋翼系统的信息流动如图2.2中浅色虚线所示。动作指令一般由谣控器(如图2.1中标 号1所示)发出,然后通过接收机传递给自驾仪;或通过地面站发出,通过数传模块(如图 2.1 中标号2所示)传递给自驾仪。 多旋翼上挂载的照相机、摄像机等设备通过图传模块(如图2.1中标号3所示)也可以将 图像、视频信号发送给遥控或地面站对手持遥控器的操控人员来说,当拨动摇杆时,遥 控器发射机发送控制指令,被固定在多旋翼上的接收机接收,然后输出油门、俯仰、滚 转、偏航等信号给自驾仪。 读取信号后,自驾仪将每个电机所需的速度控制信号传递给电调,驱动电机达到期望转 速,实现控制多旋翼完成俯仰、滚转或偏航等相应动作。对于地面站,用户可以在图形 界面中自行选定多旋翼期望目标位置,确定指令后,地面站通过数传模块发送期望位置 坐标,飞行器数传模块接收后将信号传递给自驾仪。
1.机身
02 脚架
05 材料
表2.1列出了几种材料的特性。从表中可以看出,碳纤维密度小,刚度和强度都较大,但 加工困难,价格也较贵,因此该材料多用于需要较大承重的工业多旋翼上。相比起来, 塑料密度小,易加工而且价格便宜,但刚度和强度较小,因此该材料多用于玩具或小型 航模。玻璃钢等玻璃纤维增强材料与碳纤维材料相比,重量更重且刚度更差,但该材料 易加工且更耐摔,因此目前被广泛用于中小型多旋翼。
(1)信息流动
自驾仪则可以通过 GPS 接收机模块读取当前飞行器所 在位置及速度,进而与自身其他传感器进行滤波估计, 然后根据控制算法和策略产生控制信号,进一步将控制 信号传递给电调,驱动电机达到期望转速并逐步控制飞 行器飞往指定目标。 自驾仪(如图2.1中标号4所示)作为系统中的核心单元, 通过内置加速度计、陀螺仪、磁罗盘等传感器以及外置 差分定位导航模块(如图2.1中标号5所示)光流模块(如图 2.1中标号6所示)等外接设备感知多旋翼的位置、高度 、速度等各种系统状态信息,进而根据收到的指令产生 控制信号发送至电调,驱动申机完成指定动作或航线。 自驾仪还可以接收激光雷达模块(如图2.1中标号7所示) 、ADS-B模块(如图2.1中标号8所示)等设备的信息来实 现多旋翼的避障。
德国-Me262“燕子”喷气式战斗机

梅塞施米特Me262是第一种投入实战的喷气式战斗机,一种有可能改变战局的飞机,给盟军造成巨大的心理压力和损失的飞机,同时标志着人类航空技术向前迈进一大步的飞机。
研制过程虽然被视为纳粹德国最后的秘密武器,但其实Me262早在二战前就已经开始研发,名为P.1065计划。
该计划于1939年4月首飞,原型机与最后投入实战的Me262非常相似。
但由于缺乏经费而拖慢了研发进度,当时空军的高层都认为使用传统战斗机就能够打赢战争,于是把经费投放去研发其他机种。
后掠翼的概念早于1935年由德国气动力学家阿道夫·布斯曼提出,1940年威利·梅塞施密特开始研究这个概念。
1941年4月威利·梅塞施密特提议把一对35度后掠的机翼安装到Me262上。
然而提议并没有被采纳,1944年提出的两个高速版本HGII和HGIII分别有35度和45度的后掠翼。
投产的Me262有一对前缘后掠18.5度的机翼,以维持飞机的重心。
Me262V1到V4原型机都是以后三点式(前2后1)机轮支撑,后来发觉在起飞时水平尾翼受到主翼和引擎遮挡而失效,无法拉起飞机。
於是在第5架原型机改用前三点式机轮(前1后2),问题迎刃而解。
首次试飞于1941年4月展开,但由于BMW003喷气式引擎尚未研制成功,Me262V1只能在机鼻装上容克的Jumo210活塞引擎试飞。
BMW003装上Me262V1后机鼻的活塞引擎仍然被保留着,万一两具BMW003引擎同时熄火,试飞员都能够转用活塞引擎着陆。
1942年3月25日,试飞员弗里茨·温德尔驾驶着有3具引擎的Me262V1升空,升空不久后两具BMW003引擎突然熄火,温德尔发动备用的Jumo210引擎,把原型机从失速的险境救出,安全着陆。
1942年7月18日,V3原型机只带着两具喷射引擎由试飞员弗里茨·温德尔驾驶在德国京茨堡附近的利佛海姆升空。
BMW003引擎已经证实不太可靠,V3换装了新的容克Jumo004喷气式引擎。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S lt ] ̄l ' s J
更 强 的鲁 棒性 、更 好 的 实时性 以及 处 理参 数不 确定 性 的能 力 。导弹 在整 个 定飞 行 且满 足一 定 的性能 指
标。
参
考
文
献
陈 佳实 . 弹制 导控 制系统 分析 与设 计[ . 京 : 导 M] 北 宇航 出版 社, 99 18.
Z me G. F e b c a d o t a s n i v t a s edak n pi l e s ii m t y: mo e r f r n e d l e ee c ,
飞行器制 造商斯凯 尔德复合 材料 公司对此事 发表 了简短声 明, 声
明中称飞机 受损是 小事 件 , 且无 人员伤亡 。目前 , 国联邦航 空局正 美 在对 该 事件展 开调 查,其 发言 人称 受损 的部分 是飞机 的左 侧主 起落 架, 飞机其他 部位是否 受损 尚不明确 。
行中 , 空船 2号将 由白骑 士 2 太 喷气 式飞机携 带至空 中高空释放 , 随
后依靠 自身动力装 置进入太 空 。8 1 月 9日的试 飞是 白骑士 2自20 08 年 开始试 飞 以来 的第 3 次 试飞 目 ,搭乘 太空船 2 旅游的 费用 7 前 号
为每人 2 万 美元 ,迄今 已有 30 0 3 余人 预定 。 ( 晓芳 解 供稿 )
太 空 船 2号 载 机 试 飞 时 意 外 受损
21 8 1 00年 月 9曰, 用亚轨 道太空旅游 飞行器 太空船 2号 的载 商 机 白骑士 2 试飞 中意外受损 , 在 最后 降落在加 利福尼 亚州 的莫哈维航
天发 射场 。
按照计划,太空船 2号将于 2 1 年开始商业太空旅游。实际飞 02
t n f r t n ,mu i i t e e n r s n d rxma i ess ] r s ma o s a o i lp c i smi m ,a a i t n re[ . t l av o o e v J
I E r sci s n tmai C nr l1 8 , C 2 () E E T a a t n o t o t , A 一 62. n o o Au c o 91
从 图 4可 以看 出 ,基 于特 征 点I Ⅱ设计 的 P D 自动 I 驾驶 仪, 仅在 特征 点I 处满 足设 计要 求 ,当模 型参 数变 I I 化 时 ,其 控 制精 度很 差 ,存 在着 较 大 的稳 态误 差 ,难
钱 杏芳 .导弹 行力 学[ . 京:北 京理 工大学 t M社 , 0 0 M】 北 P , 20 . 建华 . 棒 控制 理 论在倾 斜 转 弯导 弹 中的应 用 【 .北 京:国防工 业 出 鲁 M]
版 社 0 1 20 .
以控制 导弹 在全 弹道 内稳 定 飞行 。图 5为所 设计 的 自
德 国研 制 S ee 一 行 器 自 主 飞 行 控 制 系 统 hfx2飞
德 国航 空航天 中心 ( L D R)研 制 的 See- 高超声速试 验飞行 hfx 2
心是 在 S e x2 前部尖 缘设 计 的鸭式控 制面 。 目前,D R 已完 成 hf - e L See- hf 2飞行器 自 飞行控制 系统 的地面 试验 , x 主 正准 备将 子模块 集成
图 5
综 合 自动 驾 驶 仪 时 的 过 载 阶 跃 响 应
D yeJ A a s ff d ak s s m i t cue n e a t sC . ol C. n l i o e b c t sw t s u trdu cn i i 【 ] ys e ye h r ne I E rc e ig a 1 8 . 2 ( )2 52 0 E E P o edn s nD. 9 2 1 96: 4 —5 . P
前 面 基 于一 个特 征 点弹 体 名 义模 型 ,通 过双 回 路 控 制方法 设 计 了防 空 导弹 俯仰 通 道 的 综合 自动 驾 驶 仪 ,下面 在 飞行 包 线范 围 内不 同特 征 点 飞行 条件 下 , 对所 设计 的 自动 驾驶 仪进 行 仿真分 析 。
4 结 论 本 文通 过 分析 导 弹模 型 的不确 定 性 因素 ,建立 了 导 弹 的状态 空 间数 学 模型 ,采 用双 回路设 计思 想 ,基 于 某 一特 征 点飞 行条 件 下 的名义 模 型 ,利用 综合 方 法 对 自动驾驶 仪进 行 了设计 。 真表 明 , 仿 与传 统 的 PD I 控 制器 相 比, 综合 设 计方 法 减小 了参 数 不确 定性 和
到飞行器 中作进一 步的试验 。
( 云翔 杨 供稿 )
器将于 2 1 0 1年 3 月在澳大 利亚伍 默拉发射 场进行 首次 飞行试验 。
Se x2 hf . 将使用 自主 飞行 控制系 统返 回地 而 。 e
这种 自主飞行控 制系统 为鸭式控 制系统 (aa n oss m) cnrc l l t , d o r e y 能 够像 飞机 的控 制面一 样 自主调整 飞行器 的位置和 流动条 件 , 其核
釜 塑
3 仿 真 结 果
生笠 茎王 佥 堕窒曼弹自 边驾驶仪设计
3 7
动 驾驶 仪条 件 下 4个特 征 点 的过 载 阶跃 响应 ,可 以看
出 ,在不 同特 征 点下 ,实现 输 出过 载对 指令 过载 的 良 好 跟 踪 ,其 上升 时 间 、调节 时 间及超 调 都很 小 ,完全 满 足 设计要 求 。