蓝牙(NXT)机器人编程指导
NXT编程培训

一、NXT软、硬件概述
NXT 伺服电机特性
当机器人运行时,可 以校准速度 控制精度可以精确到 1度 电机上的孔结构更容 易固定和安装
NXT 传感器特性
光电传感器
触动传感器
声音传感器
超声波传感器
NXT 控制器各个面板操作说明
– – – – – – –
My Files 该彩单内可以保存在NXT上编写的程序和从电脑 上下载的程序 Try Me 可以测试程序里传感器和电机的工作状态 NXT Program 不需要在电脑上编写程序来控制机器人,可以通 过在NXT控制器 上编写程序控制机器人
NXT 控制器各个面板操作说明
– – – – – – – –
Setting 该操作面版可以查看NXT不同设置,例如NXT扬声器、关机 模式、 NXT版本信息,还可以删除NXT内保存的程序 View 在查看菜单里,可以快速查看当前传感器和电机的工作状态 和数 据,能方便我们在程序设计中设置传感器和电机的参数值 Bluetooth 可以通过蓝牙无线技术使NXT与其他蓝牙设备进行连接。
二、NXT编程软件——常用面板
软件界面概述
常用面板
→ → → → → → →
运动模块 记录模块 声音模块 显示模块 等待模块 循环模块 判断模块
三、NXT编程软件——高级面板
数据中心简介
光电传感器模块
⒈显示光电传感器所连接端口。 可以通过配置面板来进行端口定 义。 ⒉显示所设置的触发点是多少。 颜色条越多,所设触发值越大。 ⒊显示“发光”特性是否打开。 ⒋将模块放置到编程区后会自动 打开光电传感器模块的数据中心。
比较模块
⒈打开比较模块的数据中心,将 会在其左侧看到两个输入端口, 在其右侧有三个输出端口。两个 输入端口将 要通过其它模块的数据线来连接 (除非某一端口被定义为常量) 。 比较之后的结果将从最底部的输 出端口输出;从该端口连接数据 线到其它模块的数据中心。和输 入端口 相对应的两个输出端口可以将输 入端口的数值传递给其它模块。
课题论文:乐高NXT机器人的编程软件的教学和实践

学科教育论文乐高NXT机器人的编程软件的教学和实践一、乐高NXT机器人的编程软件教学和实践的意义如果说,机器人的硬件决定机器人能够“做什么”,那么机器人的软件程序决定它能“怎样做”。
优秀的程序能够给予机器人丰富的指令,让机器人实现多样化的功能。
乐高机器人目前可用C语言、VB语言、JAVA语言编程,让乐高机器人完成各式各样的操作命令,可是这类的语言过于专业,如果不是专业的计算机工作人员,很难完成复杂的程序编辑。
为了让编程过程变得可视化和简单化,乐高机器人以ROBOLAB图形化为思路,开发出G语言,它能用简单的方式完成动作循环、条件选择等程序编程,这些编程过程均有一套批处理化的专门的图标负责完成,编程人员只需要将编程模块组合并设定动作参数。
丰富、简单、易用的G语言赋予了乐高机器人强大的生命力,乐高机器人的使用者和开发者若能学习好G语言,就能让乐器机器人发挥无穷的创意。
二、乐高NXT机器人的编程软件教学和实践的平台1.引导学生熟悉操作环境所谓的操作环境,就是指要完成编程和实现编程必须具有的工作平台,教师要引导学生了解到在开始编程以前,要先检查编程的工作平台是否齐备,以免在工作中发现无法顺利的完成编程过程。
一台乐高NXT机器人的编程环境如下:通过USB2.0,乐高NXT编程程序可与计算机PC端连接起来,程序员可在计算机中完成编程程序,然后导入乐高NXT机器人处理器中。
2.引导学生熟悉操作面板学生要学会编程,首先就要熟悉操作面版,教师可以让学生理解到乐高的编程软件分为两种版本,一种是玩具版本,一种是教育版本,其区别在于玩具版本只有英语版,而教育版自带汉化版本,然而两者的功能却是一样的。
学生只有熟悉了面板的分布,在编程的时候才能知道软件的功能应当如何使用。
(1)引导学生熟悉菜单分布图1为G语言菜单界面,教师可以引导学生观察菜单界面分布的规律,让学生以最快的速度了解如果自己需要操作一个功能时,要在菜单哪个范围中寻找这项功能。
乐高机器人用户手册NXTUserGuide

超声波传感器
通过超声波测量距离,常用于 避障、定位等场景。
触碰传感器
检测物体的接触或按压,常用 于触发特定动作或反应。
声音传感器
检测声音信号,可用于声控操 作或实现声音交互功能。
温度传感器
检测环境温度,可用于温度控 制或环境感知。
传感器连接与配置方法
连接步骤
将传感器线缆插入NXT主控器对 应的传感器端口,确保连接稳固。
组装前准备工作
01
02
03
04
仔细阅读说明书
了解套件内容、组装步骤和注 意事项。
准备工具
需要一把小十字螺丝刀和一把 平口螺丝刀,用于拧紧螺丝和
拆卸部件。
安排工作空间
确保组装过程中有足够的空间 摆放零件和工具,并保持整洁。
检查电源
确认电池盒已安装好电池,并 确保电池极性正确。
逐步组装指南
构建机器人底盘
乐高机器人用户手册 NXTUserGuide
目录
• 开箱与组装 • 编程与软件安装 • 传感器与输入设备应用 • 马达与输出设备控制 • 常见问题排查与解决方案 • 进阶技巧与拓展应用
01
开箱与组装
NXT乐高机器人套件内容
NXT智能砖
控制机器人的大脑,具备强大的计算能力和多 种传感器接口。
伺服马达
创意项目设计思路展示
自动寻迹小车
利用光线传感器和电机控制,实现小车自动寻迹 行驶。
智能搬运机器人
通过编程和传感器控制,实现机器人自动搬运物 品和避障功能。
人形机器人
利用NXT机器人的灵活性和可编程性,设计人形 机器人,实现各种动作和语音交互功能。
参加比赛和展示活动建议
了解比赛规则和评分标准 在参加比赛前,需要了解比赛规则和评
关于蓝牙 NXT LEGO 蓝牙协议总揽
一、NXT硬件规格LEGO MINDSTORMS NXT利用各种先进的电子设备以实现广泛的功能。
想了解各种细节的话,请参看LEGO MINDSTORMS NXT硬件开发工具包文档。
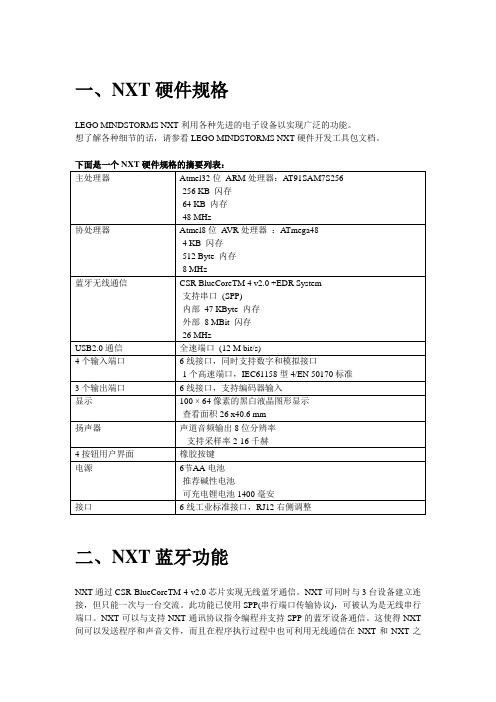
下面是一个NXT硬件规格的摘要列表:主处理器Atmel32位ARM处理器:A T91SAM7S256-256 KB 闪存-64 KB 内存-48 MHz协处理器Atmel8位A VR处理器:A Tmega48-4 KB 闪存-512 Byte 内存-8 MHz蓝牙无线通信CSR BlueCoreTM 4 v2.0 +EDR System-支持串口(SPP)-内部47 KByte 内存-外部8 MBit 闪存-26 MHzUSB2.0通信全速端口(12 M bit/s)4个输入端口6线接口,同时支持数字和模拟接口-1个高速端口,IEC61158型4/EN 50170标准3个输出端口6线接口,支持编码器输入显示100 × 64像素的黑白液晶图形显示-查看面积26 x40.6 mm扬声器声道音频输出8位分辨率- 支持采样率2-16千赫4按钮用户界面橡胶按键电源6节AA电池-推荐碱性电池-可充电锂电池1400毫安接口6线工业标准接口,RJ12右侧调整二、NXT蓝牙功能NXT通过CSR BlueCoreTM 4 v2.0芯片实现无线蓝牙通信。
NXT可同时与3台设备建立连接,但只能一次与一台交流。
此功能已使用SPP(串行端口传输协议),可被认为是无线串行端口。
NXT可以与支持NXT通讯协议指令编程并支持SPP的蓝牙设备通信。
这使得NXT 间可以发送程序和声音文件,而且在程序执行过程中也可利用无线通信在NXT和NXT之间发送和接收信息。
为了减小蓝牙功耗,这里用的是蓝牙2类设备,也就意味着有效距离最大10米。
NXT BRICK蓝牙功能NXT BRICK蓝牙功能被设置为主/从通信通道。
也就是说网络中需要有一台NXT作为主机,在需要时,其他NXT再通过它通信。
蓝牙(NXT)机器人编程指导

应用领域及前景
• 教育领域:蓝牙(NXT)机器人可以作为教育工具,帮助学生了解机器人技术和编程知识。通过搭建和编程蓝牙 (NXT)机器人,学生可以培养动手能力和创新思维。
• 研究领域:蓝牙(NXT)机器人可以作为研究平台,用于研究机器人技术、人工智能等领域的前沿问题。研究人 员可以通过对蓝牙(NXT)机器人的改进和优化,推动相关技术的发展。
优化算法实现
对所选算法进行优化,包 括改进算法逻辑、减少计 算复杂度、提高代码执行 效率等方面。
性能评估与调优
通过性能测试和评估,发 现程序中存在的性能瓶颈 ,并针对性地进行优化和 调整。
错误处理与调试技巧
错误处理机制
建立完善的错误处理机制,包括错误检测、错误报告和错 误恢复等方面,以确保程序在出现异常情况时能够及时处 理并恢复正常运行。
感谢您的观看
调试与测试方法
使用LEGO MINDSTORMS NXT软件进行调试
该软件提供了实时数据监控和调试功能,方便用户查看和修改机器人状态。
使用蓝牙进行远程调试
通过蓝牙连接,将程序下载到NXT机器人上,进行实际运行测试。
日志记录与分析
在程序中添加日志记录功能,将机器人运行状态和相关数据记录下来,以便后续分析和 优化。
03
使用Python语言编程,易于学习和使用,同时拥有强大的库支
持和跨平台兼容性。
基本语法和编程规范
01
02
03
04
程序结构
了解主程序、子程序和中断服 务程序的概念及其在组织程序
中的作用。
语法规则
学习并掌握所选编程语言的基 本语法规则,如语句、表达式
、控制结构等。
命名规范
采用有意义的变量名和函数名 ,提高代码可读性和可维护性
nxt机器人硬件及软件介绍

nxt硬件及软件介绍1、硬件介绍:1.1 NXT的外观及组成部分NXT是一种教育用,外观为方形,整体由多个部件组成。
包括主控制器(Brick),用于控制的运行和连接各种传感器和执行器;电机(Motor),用于驱动的运动;传感器(Sensor),如触摸传感器、光线传感器、声音传感器等,用于感知周围的环境。
1.2 NXT的电源及连接接口NXT使用可充电电池作为电源,并提供了与其他设备和传感器连接的接口。
主控制器上有多个端口,可以连接电机和传感器,并通过USB或蓝牙与计算机或其他外部设备进行通信。
2、软件介绍:2.1 NXT的编程环境NXT使用LEGO MINDSTORMS NXT软件作为编程环境。
该软件提供了图形化编程界面,使用户可以通过拖拽和连接代码块的方式编写程序。
同时,也支持使用文本编程语言(如C语言)进行高级编程。
2.2 NXT的编程功能LEGO MINDSTORMS NXT软件提供了丰富的编程功能,用户可以通过编程实现的各种功能。
包括控制电机的转动速度和方向、读取传感器的数值、根据传感器的输入做出相应的决策等。
3、附件:本文档附带的附件包括:- LEGO MINDSTORMS NXT软件安装文件- NXT使用手册- NXT部件说明书- 相关编程案例和示例代码4、法律名词及注释:4.1 版权法:版权法是指保护作品的著作权人对其创作的作品享有的权利的法律。
根据版权法的规定,除非得到著作权人的许可,否则不得擅自复制、传播、展示或改编作品。
4.2 专利法:专利法是指保护发明者对其发明享有专有权利的法律。
根据专利法的规定,发明者可以通过申请专利来保护其发明,并获得在一定时期内对其发明的独占权。
4.3 商标法:商标法是指保护商标的法律。
商标是指用于区别商品或服务来源的标识,如商标名称、商标图案等。
根据商标法的规定,商标权人可以通过注册商标来保护其商标,并获得对该商标的独占使用权。
NXT编程指南入门
北京:010-58731385 西觅亚科技有限公司
LEGO MINDSTORMS Edu NXT
软 件 编 程 指 南
西觅亚科技有限公司 2006.09.12
北京:010-58731385 西觅亚科技有限公司
上海:021-64157585
深圳:0755-61617053 E-mail:moonbirdok@
尤于时间仓促,难免有错误和疏漏的地方,希望得到您的批评和指正。感谢 您多年来对贵公司的支持和帮助。
北京:010-58731385 西觅亚科技有限公司
上海:021-64157585
深圳:0755-61617053 E-mail:moonbirdok@
运动模块
使用这个模块控制机器人向前走或者向后走直线,还可以控制机器人走曲线。通过延续特性 确保机器人走多远。
⒈这个模块右上角的字母表示马达连接到 NXT 的哪个输出端口。 ⒉这个图标表示机器人运行的方向。 ⒊这个图标表示马达能量。机器人速度也可能受其他条件影响,比如地面的摩擦力或者机器 人是在上坡或者下坡。 ⒋这个图标表示你设置马达的延续特性是没有限制,角度,圈数,或者时间。
显示设置
⒈这个图标显示判断的条件是传感器还是其他条件。图中所表示的状态是触动传感器判断模 块。 ⒉当触动传感器被按下上面的模块将被执行。 ⒊当触动传感器松开则执行下面的支路。
⒈如果你选择数值条件来控制判断模块,一个数据线头将会显示在判断模块前端的下部;你 必须从另外一个模块连接一个逻辑或者数值才能控制判断模块。
2024版年度nxt机器人(乐高)中文教程

2024/2/2
31
17
循迹行驶与避障功能实现项目
项目目标
使NXT机器人能够沿特定轨迹行驶,并具备 避障功能。
软件编程
使用传感器检测轨迹与障碍物,编写相应控 制逻辑。
2024/2/2
硬件需求
NXT主机、电机、轮子、颜色传感器、超声 波传感器等。
调试与优化
调整传感器灵敏度、控制算法等提高行驶稳 定性与避障准确性。
18
自动搬运与分拣系统设计项目
创意项目3
音乐演奏机器人,能够演奏简单乐 曲并与观众互动。
03
2024/2/2
02
创意项目2
迷你足球机器人,能够模拟足球比 赛进行射门与防守。
创意项目4
……(更多创意项目等待你去发掘和 实现)。
04
20
05 NXT机器人竞赛 策略
2024/2/2
21
竞赛规则解读及应对策略制定
01
02
03
详细了解竞赛规则
传感器故障
确认传感器是否正确连接,若传感器无反应, 尝试重新插拔或更换传感器。
电池问题
检查电池电量是否充足,若不足,请使用合 适的充电设备为电池充电。
2024/2/2
线路连接问题
检查各部件线路连接是否稳固,若有松动或 脱落,请重新连接。
27
软件问题定位及解决方案提供
程序错误
检查程序编写是否正确,若有语法错误或逻 辑错误,请进行修改。
通过直观的图形化界面,用户可以方 便地拖拽和组合各种功能模块,为 NXT机器人编写程序。
2024/2/2
12
编程语言与基础语法
2024/2/2
01
NXT-G采用图形化编程语言,用户无需编写复杂的代码,只需 通过拖拽和组合图形模块即可实现编程。
最新nxt机器人硬件及软件介绍

USB线 连接电脑,可下载程序
___________________________ _______________________
机器人数据传输
2、蓝牙无线传输
___________________________ _______________________
蓝牙 (Bluetooth)
• 使用蓝牙,我们将开放给世界一个机会 -----这更多的将由LMS公司开发:
• 使您的电脑和您的机器人之间通过无线通信互相交流 • 几个机器人之间的无限通讯 • 使用您的流动电话作为一个先进的传感器 • 用您的移动电话来遥控您的机器人 • 在您的PDA和您的机器人之间设定通信
___________________________ _______________________
nxt机器人硬件及软件介绍
___________________________ _______________________
简易机器 人的组成
机器人控制核心 传感器 电机
机械传动结构 机器人程序
______________
大脑:机器人控制核心
___________________________ _______________________
32位 ARM7 微处理机 8位协处理器 256K闪存 标准蓝牙无线通讯 USB 2.0 全速端口 [12 Mbit/秒] 4个输入端口, 6 线指状导线. 一个端口 包含了61158综合电子控制 型号4/EN 50 170 将来会允许拓展端口使用 3 个输出端口, 6 线指状导线 可编程的液晶显示 64 x 100映像点 扬声器: 8 千赫兹的声音质量. 声音线 路8位 以及 2-16千赫兹的简单比率 通过乐高的孔 来实现简单并快速的搭 建 可充电的蓄电池盒
nxt机器人(乐高)中文教程
nxt(乐高)中文教程一、教学内容本节课的教学内容选自《NXT(乐高)中文教程》第一章第四节,主要介绍如何使用NXT的传感器和执行器进行简单的编程控制。
具体内容包括:温度传感器的使用、触摸传感器的使用、电机的基本控制和传感器数据的读取与显示。
二、教学目标1. 学生能够理解NXT的基本组成部分及其功能。
2. 学生能够掌握温度传感器和触摸传感器的使用方法。
3. 学生能够通过编程控制电机实现基本运动。
三、教学难点与重点重点:NXT的基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
难点:传感器数据的读取与显示、编程控制电机实现复杂运动。
四、教具与学具准备教具:NXT套件、电脑、编程软件。
学具:每位学生一台NXT套件、每组一台电脑、编程软件。
五、教学过程1. 实践情景引入:让学生观察并描述NXT的外观和组成部分。
2. 知识点讲解:介绍NXT的基本组成部分及其功能,如电机、传感器、触摸屏等。
3. 例题讲解:示范如何使用温度传感器和触摸传感器进行编程控制。
4. 学生动手实践:让学生分组进行编程实验,使用温度传感器和触摸传感器控制NXT的运动。
5. 随堂练习:让学生编写程序,实现使用传感器数据控制NXT的运动。
6. 知识拓展:介绍如何使用编程软件进行电机控制和传感器数据的读取与显示。
六、板书设计板书内容:NXT基本组成部分及其功能、温度传感器和触摸传感器的使用方法、电机的基本控制。
七、作业设计1. 请用编程软件编写一个程序,实现使用温度传感器控制NXT的运动。
答案:根据温度传感器的数据,控制NXT的电机进行相应的运动。
2. 请用编程软件编写一个程序,实现使用触摸传感器控制NXT的运动。
答案:根据触摸传感器的状态,控制NXT的电机进行相应的运动。
八、课后反思及拓展延伸本节课学生掌握了NXT的基本组成部分及其功能,能够使用温度传感器和触摸传感器进行编程控制。
但在传感器数据的读取与显示方面,部分学生仍存在困难,需要在课后加强练习和指导。
蓝牙(NXT)机器人编程指导
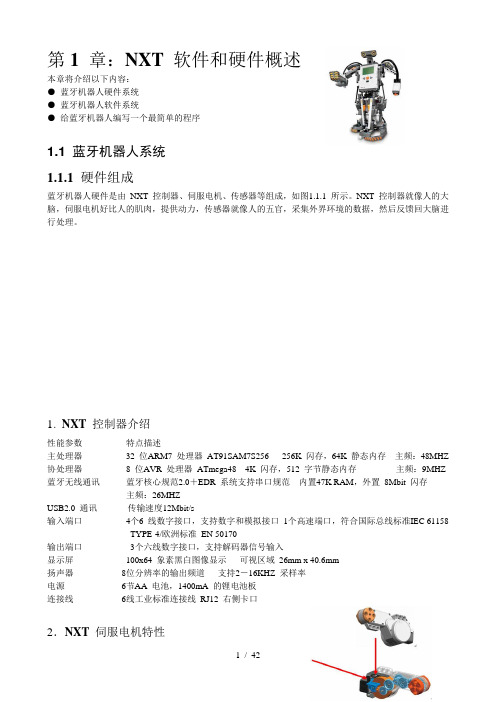
第1 章:NXT 软件和硬件概述本章将介绍以下内容:●蓝牙机器人硬件系统●蓝牙机器人软件系统●给蓝牙机器人编写一个最简单的程序1.1 蓝牙机器人系统1.1.1 硬件组成蓝牙机器人硬件是由NXT 控制器、伺服电机、传感器等组成,如图1.1.1 所示。
NXT 控制器就像人的大脑,伺服电机好比人的肌肉,提供动力,传感器就像人的五官,采集外界环境的数据,然后反馈回大脑进行处理。
1.NXT 控制器介绍性能参数特点描述主处理器32 位ARM7 处理器AT91SAM7S256 256K 闪存,64K 静态内存主频:48MHZ 协处理器8 位AVR 处理器ATmega48 4K 闪存,512 字节静态内存主频:9MHZ 蓝牙无线通讯蓝牙核心规范2.0+EDR 系统支持串口规范内置47K RAM,外置8Mbit 闪存主频:26MHZUSB2.0 通讯传输速度12Mbit/s输入端口4个6 线数字接口,支持数字和模拟接口1个高速端口,符合国际总线标准IEC 61158 TYPE-4/欧洲标准EN 50170输出端口3个六线数字接口,支持解码器信号输入显示屏100x64 象素黑白图像显示可视区域26mm x 40.6mm扬声器8位分辨率的输出频道支持2-16KHZ 采样率电源6节AA 电池,1400mA 的锂电池板连接线6线工业标准连接线RJ12 右侧卡口2.NXT 伺服电机特性内置角度传感器可以测量速度和距离可以精准控制:●当机器人运行时,可以校准速度●控制精度可以精确到 1 度●电机上的孔结构更容易固定和安装●每个电机内置一个角度传感器,这使你能准确的控制电机转动,角度传感器测量电机转动能精确到1 度电机转动1 圈等于360 度,因此如果你在程序里设定电机转动180 度,电机输出时将转动半圈。
3.NXT 传感器特性触动传感器性能上与RCX 触动传感器一样,但NXT 触动传感器4.NXT 蓝牙特性蓝牙(BlueTooth)是一种低成本大容量短距离无线通讯新规范,蓝牙规范采用微波频段工作,传输速率每秒1MB字节,最少传输距离10 米,通过增加发射功率可达到100米。
nxt机器人硬件及软件介绍解析

不需要在电脑上编写程序来控制机器人,可以通过在 NXT 控制器 上编写程序控制机器人
该操作面版可以查看 NXT 不同设置,例如 NXT 扬声器、关机模式、 NXT 版本信息,还可以删除 NXT 内保存的程序
在查看菜单里,可以快速查看当前传感器和电机的工作状态和数 据,能方便我们在程序设计中设置传感器和电机的参数值
nxt机器人硬件及软件介绍
机器人控制核心 传感器
简易机器 人的组成
电机 机械传动结构 机器人程序
大脑:机器人控制核心
32位 ARM7 微处理机 8位协处理器 256K闪存 标准蓝牙无线通讯 USB 2.0 全速端口 [12 Mbit/秒] 4个输入端口, 6 线指状导线. 一个端口 包含了61158综合电子控制 型号4/EN 50 170 将来会允许拓展端口使用 3 个输出端口, 6 线指状导线 可编程的液晶显示 64 x 100映像点 扬声器: 8 千赫兹的声音质量. 声音线路 8位 以及 2-16千赫兹的简单比率 通过乐高的孔 来实现简单并快速的搭 建 可充电的蓄电池盒
NXT
输出端口
连接马达
USB端口
你可以上传或下载数据
电池剩余量 NXT名称 蓝牙 图标 进入/开始 选择 清除
输入端口
连接传感器
机器人连接线
6星线
导线转换
+ RCX 传感器
机器人数据传输
1、数据线传输
USB线 连接电脑,可下载程序
机器人数据传输
Hale Waihona Puke 2、蓝牙无线传输蓝牙 (Bluetooth)
教学区里对电机、传感器、灯泡、扩音器和显示屏 的操作都进行了讲解,通过教学区的学习,我们能 够更快 的了解电机和每个传感器的使用,其中还包 括了搭建技巧和编程指导的学习,是我们快速入门 的好渠道。
第二章 编写在NXT上运行的机器人程序

•
Behaviors模块
•TETRIX模块源自编写一个程序让机器人行走一段距离并停止。
• 机器人电机连接:
• 参考程序:
下载程序与更新控件:
• 制作一个机器人,当听到声音时会发出声音,受 到碰撞时都启动灯光(如无灯光也可启动电机)。
• 以下两程序哪个更好,请说明:
参考程序如图所示:
第二章
编写在NXT上运行的机器人程序
• 如果我们编写的程序 是要在NXT机器人上 运行,我们在运行软 件的时候就要选择 Blank VI Targeted to NXT
• 在前面板中增加了如下图所示的NXT模块:
• 在后面板中NXT模块显示如下:
• Programming模块
•
NXT I/O模块
乐高NXT机器人无线技术设计
对乐 高基于 3 2位芯片构成的新型 NX T机器人系统做 了一些 操作系统平台上运 行,极大地方便 了跨平台开发 以及对知识 初 步 的学 习 , 对 NXT机 器 人 系 统 中基 于 无 线 技 术 的蓝 牙 通 产 权 的 尊 重 。考 虑 到 跨 平 台 、 资源 开 放 性 以及 知 识 产 权 等 方 并
乐 高 “ 堂 机 器 人 ” 统 是 由美 国 麻省 理 工 大 学 、 国 T 课 系 美 U.
模型搭建和计 算机编程有效地 结合在 一起 ,使参与者能够设 最少传输距 离 1 , 0米 通过增加 发射 功率可达到 10米 。蓝牙 o 计 自己的机器人 。在 计算机上编 写程序下载到机器人的微型 技术有多个 版本,乐高 NX T机器 人采用蓝牙 V . 20以及通讯
讯 功 能进 行 了一 定 的研 究 , 文主 要 描 述 了构 建基 于 乐 高 NX 面的优势, 本 T 本文将采用 L J 软件系统进行 NXT机器人系统 eOS 机 器 人 的 无 线 网络 系统 设 计所 涉 及 到 的相 关技 术 。 的开发工作。
2乐 NX _ T机 器人 软 件 系 统组 成
2024年NXT机器人培训教案

NXT机器人培训教案教案NXT培训教案一、教学目标1.让学生了解NXT的基本结构和功能。
2.培养学生运用NXT进行编程和搭建的能力。
3.提高学生的团队合作意识和创新能力。
二、教学内容1.NXT基本结构介绍2.NXT编程软件的使用3.NXT搭建方法4.NXT项目实践三、教学方法和手段1.采用讲解、演示、实践相结合的教学方法。
2.运用多媒体教学手段,展示NXT的相关知识和操作过程。
3.引导学生进行团队合作,共同完成项目。
四、教学步骤1.导入新课:介绍NXT的背景和意义,激发学生的学习兴趣。
2.讲解NXT基本结构:介绍NXT的各个部件及其功能,让学生对NXT有整体的认识。
3.演示NXT编程软件的使用:现场演示编程软件的操作步骤,让学生了解如何编写程序控制NXT。
4.讲解NXT搭建方法:讲解NXT的搭建原理和步骤,让学生掌握搭建NXT的基本技能。
5.项目实践:将学生分成若干小组,每组负责完成一个NXT项目。
教师巡回指导,解答学生疑问。
6.作品展示与评价:各小组展示自己的NXT项目,进行自评、互评和教师评价,总结项目实践中的收获和不足。
7.课堂小结:回顾本节课所学内容,强调NXT编程和搭建的重要性,鼓励学生在课后继续探索和实践。
五、教学评价1.过程评价:观察学生在课堂上的参与程度、合作意识和创新能力,给予及时反馈。
2.作品评价:评价各小组的NXT项目,关注项目的完整性、创新性和实用性。
3.学生自我评价:鼓励学生反思自己在项目实践中的表现,总结经验教训。
六、教学资源1.NXT套件2.编程软件3.多媒体课件4.搭建图纸七、教学建议1.针对不同学生的学习基础和兴趣,适当调整教学内容和难度。
2.鼓励学生动手实践,培养实际操作能力。
3.注重团队合作,培养学生的沟通能力和协作精神。
4.鼓励学生创新思维,提高解决问题的能力。
5.定期举办NXT竞赛和展示活动,激发学生的学习兴趣和动力。
本教案旨在培养学生对NXT的认识和兴趣,通过讲解、演示、实践相结合的教学方法,使学生掌握NXT的基本编程和搭建技能。
2024版nxt培训手册完整版二

NXT系统特点
分析NXT系统的特点、优 势和不足之处,以及与其 他系统的比较。
培训目标与课程安排
培训目标
明确本次培训的目标,包 括学员应掌握的知识和技 能,以及培训后的应用方 向。
课程安排
详细介绍本次培训的课程 设置、时间安排和教学方 法,以及每门课程的学习 目标和重点内容。
考核标准
说明本次培训的考核方式 和标准,以及合格与优秀 的评判标准。
法。
反思与总结
03
结合自身队伍情况,反思不足之处,总结提高的方法。
06
进阶技能提升方向指引
深入学习传感器原理及应用场景
掌握传感器基本工作原理
了解不同类型传感器的感应机制,如光电、压力、温度等。
学习传感器接口与通信协议
熟悉传感器与控制器之间的通信方式,如I2C、SPI等。
分析传感器应用场景
针对不同领域,研究传感器的应用案例,如智能家居、工业自动化 等。
探索复杂运动控制算法实现
学习PID控制算法
掌握比例、积分、微分控制原理,实现精确运动控制。
研究路径规划算法
了解基于栅格、采样或优化的路径规划方法,实现机器人自主导航。
探索动力学建模与仿真
学习机器人动力学建模方法,利用仿真软件进行性能分析。
拓展创新项目设计思路展示
创意项目构思
结合实际需求,提出具有创新性的项目设计思路。
数据类型
NXT-G支持多种数据类型,如整数、 浮点数、布尔值、字符串等。
02
变量与常量
变量用于存储程序中的数据,常量表 示固定不变的值。
01
数学函数
NXT-G提供了一些内置的数学函数, 如三角函数、对数函数等,用于进行 更复杂的数学运算。
LEGONXT机器人教学手册

实现远程控制与数据传
远程控制
借助网络通信技术,用户可以通过手机APP或电脑软件对 LEGONXT机器人进行远程控制,实现机器人的移动、转向、抓 取等操作,满足远程操控的需求。
数据传输
LEGONXT机器人可以实时采集环境数据、传感器数据等,并通 过无线网络将这些数据传输到云端或本地服务器,供用户进行 分析和处理,为机器人的智能化应用提供支持。
足球比赛 利用机器人的移动和传感器功能,进行足球比赛 的模拟,包括射门、防守和团队合作等策略。
3
自定义运动 结合多种传感器和运动控制,实现个性化的机器 人运动,如跟随音乐节奏、模拟动物行为等。
编程优化:提高代码效率与可读性
代码重用与模块化
将常用功能封装为函数或模块,方便调用和修改,提高代码 的可维护性。
测量法
软件诊断
使用万用表等测量工具,对电路中的电压、 电流、电阻等参数进行测量,以判断电路是 否正常。
通过机器人自带的诊断程序或外部编程软件, 对机器人进行在线或离线诊断,以定位故障。
维护保养建议及注意事项
定期清洁
定期清理机器人表面的灰尘和污垢,保持传感器和镜头的清洁,以确 保机器人的正常运行和延长使用寿命。
执行器
接收控制器的指令,驱动机器人 完成各种动作,如电机、舵机等。
结构件
构成机器人外观和结构的部件, 如乐高积木、连接件等。
LEGONXT机器人编程环境
图形化编程软件
提供直观的图形化编程界 面,用户可以通过拖拽和 组合图形块来编写程序, 无需复杂的文本编程。
编程语言支持
除了图形化编程, LEGONXT机器人还支持 多种编程语言,如Python、 C等,满足高级用户的需求。
超声波传感器
LEGO NXT 机器人教学手册

觸碰感應器
•接觸傳感器能夠感受到物體的擠壓、釋放和撞 擊。如下圖所示:
間的光線強度和根據 顏色來測量光線強度。
超音波感應器
•能夠讓機器人看見和檢測到物體。你可以使用它來防 止機器人碰到障礙物,測量距離,檢測移動。 •檢測距離的單位可以是公分或者英吋。可以檢測的距 離從0到255公分,精度是正負3公分。 •使用的技術和蝙蝠很像。它通過計算聲音返回使用的 時間來計算距離。大的表面堅硬的物體是最容易辨認 的。軟織物、表面彎曲的物體(比如球)或者很薄、 很小的物體比較難辨認。
動手做一個夾子
NXT 機器人介紹
主機
A B C:輸出Port(接馬達、燈泡)
螢幕畫面
揚聲器
1 2 3 4:輸入Port(接感應器)
主機、馬達與感應器-感應器
觸碰感應器
光源感應器
色彩感應器
聲音感應器
超音波感應器
主機、馬達與感應器-馬達
•馬達有一個內建的旋轉 傳感器,它可以讓你精 確的控制機器人的動作。 例如你可以控制它旋轉 指定的度數、圈數、秒 數或無限。 •內建角度感應器,可讀 出馬達轉了幾度
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1 章:NXT 软件和硬件概述本章将介绍以下内容:●蓝牙机器人硬件系统●蓝牙机器人软件系统●给蓝牙机器人编写一个最简单的程序1.1 蓝牙机器人系统1.1.1 硬件组成蓝牙机器人硬件是由NXT 控制器、伺服电机、传感器等组成,如图1.1.1 所示。
NXT 控制器就像人的大脑,伺服电机好比人的肌肉,提供动力,传感器就像人的五官,采集外界环境的数据,然后反馈回大脑进行处理。
1.NXT 控制器介绍性能参数特点描述主处理器32 位ARM7 处理器AT91SAM7S256 256K 闪存,64K 静态内存主频:48MHZ协处理器8 位AVR 处理器ATmega48 4K 闪存,512 字节静态内存主频:9MHZ 蓝牙无线通讯蓝牙核心规范2.0+EDR 系统支持串口规范内置47K RAM,外置8Mbit 闪存主频:26MHZUSB2.0 通讯传输速度12Mbit/s输入端口4个6 线数字接口,支持数字和模拟接口1个高速端口,符合国际总线标准IEC 61158 TYPE-4/欧洲标准EN 50170输出端口3个六线数字接口,支持解码器信号输入显示屏100x64 象素黑白图像显示可视区域26mm x 40.6mm扬声器8位分辨率的输出频道支持2-16KHZ 采样率电源6节AA 电池,1400mA 的锂电池板连接线6线工业标准连接线RJ12 右侧卡口2.NXT 伺服电机特性内置角度传感器可以测量速度和距离可以精准控制:●当机器人运行时,可以校准速度●控制精度可以精确到1 度●电机上的孔结构更容易固定和安装●每个电机内置一个角度传感器,这使你能准确的控制电机转动,角度传感器测量电机转动能精确到1 度电机转动1 圈等于360 度,因此如果你在程序里设定电机转动180 度,电机输出时将转动半圈。
3.NXT 传感器特性触动传感器性能上与RCX 触动传感器一样,但NXT 触动传感器前端带有十字孔,方便我们制作缓冲器4.NXT 蓝牙特性蓝牙(BlueTooth)是一种低成本大容量短距离无线通讯新规范,蓝牙规范采用微波频段工作,传输速率每秒1MB字节,最少传输距离10 米,通过增加发射功率可达到100米。
NXT 蓝牙一般特性●蓝牙V2.0(CLASS II)●支持SPP(串行埠定义)●传输范围至少10M,最大范围达到30M 或甚至更远●具有很强的安全性NXT 蓝牙的主要功能:●与带有蓝牙功能的设备通讯。
如:手机、电脑等●能同时可以与3 个设备连接●可以搜索其它蓝牙设备●能记住前一个连接的设备并快速连接●可以将NXT 隐藏●可以关闭蓝牙以节省电源1.1.2 软件组成The LEGO® MINDSTORMS® Education NXT Softwa r e 是使用“LabView™引擎开发的图形化编程软件,该软件入门起点低,拓展面广,具有循序渐进式的友好的用户界面,整个编程界面只使用了43 个命令图标,编程速度更快,功能更强大。
软件共分为”模块界面、编程区、控制面板、参数设置面板和教学区“五部分。
相比其它图形化编程软件,该软件在功能上做了很大提高,具体特点如下:1.基于Labview 图形化编程语言(G 语言)G 语言(Graphical Language)。
G 语言是一个划时代的高效用的图形化编程开发环境,提供了一种更快捷的程序编写方法,编程环境直观明了,它有几百个模块组成,用一个个图形模块代替传统的编程语句,例如循环、条件等都有相应的图标,可以完成所有C 语言和VB 等语言的功能,设计者只需要把所需的图标从功能模块中抓取下来进行连线即可实现程序编写,无需编写任何代码,与传统编程的表现形式有根本区别,但其编程的逻辑思维与传统编程一样,和C、VB 等一样都是计算机的编程语言。
所有这些特性使G 语言更易于学习,从而减少程序开发时间,提高编程质量。
2.循序渐进式的友好的用户界面交互式快速入门向导, 三等级编程模块区,从易到难,从基本模块到高级模块。
38 个编程模块,入门更加快方便、快捷。
3. 任务驱动式的学习环境-39 个活动案例1.2 软件安装1.2.1 系统配置要求在我们安装LEGO® MINDSTORMS® Education NXT Software 软件之前,要确信电脑系统配置满足最低要求。
PC 机配置要求●操作系统要求是Windows XP 专业版或者家庭版,并且要带有SP2 补丁●处理器要求是英特尔奔腾处理器或者最小为800MHZ 的处理器(推荐1.5G或者更高)●内存最小为256M(推荐512 兆M)要有大于300M 可用的硬盘空间●1 个可用USB 端口和CD-ROM 光驱●支持蓝牙适配器(可选)1.2.2 PC 机上安装步骤退出电脑上打开的程序窗口→将安装光盘插入光驱→如果你发现电脑没有自动安装软件→单击电脑屏幕左下角“开始”按钮,点击“运行”→并输入“G:\autorun.exe(G 为光驱的盘符) →接下来按照屏幕上提示的步骤安装就行了。
1.3 硬件快速入门1.3.1 安装电池NXT 控制器需要安装6 节AA 电池,推荐使用碱性电池,NXT 也可以使用AA/LR6 类可充电电池,但是,NXT 力量显示出来也许没使用碱性电池大。
当NXT 显示电量低时,这个电量图象会不停的闪动注意!不能在NXT 内使用不同类型的电池,要及时将用完电池取出,NXT 长期不使用时要将里面电池取出,不能在NXT 内直接对AA/LR6 类充电电池充电1.3.2 NXT 控制器全貌1.NXT 输入、输出端口●NXT 控制器是LEGO® MINDSTORMS® 教育机器人的大脑,它有三个输出端口、四个输入端口和一个USB 端口。
●伺服电机通过连接线可以连接到NXT 控制器任意输出端口(A、B、C)上,也可以使用套装内转换线缆,将●灯泡和RCX 系列的电机连接到输出端口上,在NXT 上电机或灯泡默认设置如下:端口A:此端口上电机或灯泡起到扩展功能的作用端口B:当机器人由两电机驱动运动时,B 端口连接一个电机,通常是机器人左边的驱动部分端口C:当机器人由两电机驱动运动时,C 端口连接一个电机,通常是机器人右边的驱动部分●传感器通过连接线可以连接到NXT 控制器任意输入端口(1、2、3、4)上,也可以使用套装内转换线缆,将RCX 系列的传感器或第三方传感器连接到输入端口上,在NXT 上传感器默认设置如下:端口1:连接触动传感器端口2:连接声音传感器端口3:连接光电传感器端口4:连接超声波传感器2.NXT 控制器各个面板操作说明NXT 控制器包含6 个操作面版,分别为“My Files”、“Try Me”、“Settings”、“Bluetooth”、“View”、“NXTProgram”,下面简单介绍每个操作面版功能。
3.NXT 显示器上各标识的解释1.3.3 菜单详解1.NXT 主菜单-My Files2.NXT 主菜单-Try Me3.NXT 主菜单-NXT Program我们可以将在NXT 上编写的程序进行保存,程序将被自动保存在“NXT Files”中,以后可以在该文件夹中打开保存的程序。
现在来编写下以下程序,体会如何在程序中使用各种传感器4.NXT 主菜单-Settings5.NXT 主菜单-View6.NXT 主菜单-Bluetooth1.3.4 与电脑通讯1.使用USB 通讯(1)PC 机上连接NXT(2)MAC 机上连接NXT将NXT 连接到电脑之前要确信电脑上已经安装有LEGO® MINDSTORMS® Education NXT Softwa r e打开NXT 电源,用USB 连接线将NXT 与电脑进行连接。
2.使用蓝牙无线通讯3.蓝牙通讯的简单介绍(略)1.4 软件快速入门1.4.1 软件菜单介绍1.菜单和工具栏2.档案管理1.4.2 软件面板NXT 整个工作面板分为“模块面板”、“编程区面板”、“控制面板”、“参数设置面板”、“教学区面板”五个面板,下面对每个面板功能进行介绍。
1.模块面板介绍如图中所示“模块面板”又分为“基本面版”、“完整面板”和“自定义面板”三个面板。
“基本面板”包括常用的7 个功能模块,从上到下依次为“输出功能模块、记录功能模块、声音功能模块、显示功能模块、等待功能模块”、循环功能模块、分支功能模块”。
下面就每个图标功能作简单介绍:“完整面板”里面包括了所有编程模块,能完成VB 、C 语言所有的功能。
我们可以将“基本面板”比 作为ROBOLAB 编程里的“导航者”级别,那么“完整面板”就相当于“发明家”级别。
面板包括6 个功能模块,每个功能模块里包含了子模块,从上到下分别为“基本功能模块、输出功能模块、传感器设置模块、结构模块、数据运算模块、高级功能模块”。
“自定义面板”分为自己定义的模块和网上下载的模块,通过自定义模块,我们可以设置自己的功能模块,比如说修改功能模块的参数或将几个不同的功能模块做成一个新的模块,实现一个新的功能,模块将自动保存在“我的文档”默认的“LEGO Creations”文件夹中,可以方便我们以后调用。
2.控制面板3.编程区介绍编程区是我们完成程序编写的区域,可以关闭掉教学区域来增大编程区的窗口,方便我们编写和阅读。
左图为程序开始图标。
编写程序时直接将要使用的功能模块从“模块面板”中拖到编程区进行设置即可,可以用鼠标移动模块,能将模块拖拉到编程区的任意位置,操作简便。
4.参数设置面板NXT 软件中只有43 个功能模块(不包括自定义模块),但每个功能模块都有对应的参数面板,通过修改参数可以使模块实现不同的功能,相比ROBOLAB 软件中,NXT 软件中每个模块集成了多方面的功能,下面举个例子看下。
完成A、C 两电机输出,运行2 秒后停止。
在ROBOLAB 软件中程序编写如下:在NXT 软件中编写程序如下:我们来比较一下,完成同一任务,在ROBOLAB 软件中编写需要4 个功能图标来实现,而在NXT 软件中只需一个功能模块就能完成。
如上图①,模块对应的参数面板设置为图②,其中包括了电机输出端口设置、运行方向设置、转弯设置、电机能量级别设置、延续时间设置和停止设置,可以看出,在NXT 软件中编写程序会更方便和简洁,修改起来也非常容易,直接在参数面板里修改。
1.4.3 我的第一个程序-HELLO WORLD到这里,我们已经了解和学习了NXT 的硬件和软件,现在来编写一个简单的程序,理解程序是如何下载到NXT的。
第2 章:普通面板本章将介绍以下内容:●运动模块●判断模块●等待模块●声音模块●循环模块●显示模块●记录/学习模块●NXT 之间相互通讯2.1运动模块1. 模块功能使用这个模块控制机器人向前走或者向后走直线,还可以控制机器人走曲线。