四足机器人(课程标准)
四足运动控制课程设计

四足运动控制课程设计一、课程目标知识目标:1. 学生能够理解四足动物的运动原理,掌握四足机器人的基本结构及其功能。
2. 学生能够描述四足运动控制的基本算法,并了解其在实际应用中的优势。
3. 学生能够解释步态生成与调节的基本方法,并分析不同步态对运动性能的影响。
技能目标:1. 学生能够设计并搭建简单的四足机器人模型,进行基本的运动控制实验。
2. 学生通过编程实践,掌握四足运动控制的基本技巧,实现对四足机器人的速度、方向和步态的有效控制。
3. 学生能够运用所学知识,针对特定场景提出四足机器人的优化方案,解决实际问题。
情感态度价值观目标:1. 学生通过课程学习,培养对机器人科技的兴趣和好奇心,激发创新意识。
2. 学生在团队协作中学会沟通与交流,培养合作精神和集体荣誉感。
3. 学生能够认识到四足运动控制在灾害救援、环境监测等领域的应用价值,增强社会责任感。
课程性质:本课程为实践性较强的综合课程,结合了机械、电子、计算机等多学科知识。
学生特点:六年级学生具备一定的逻辑思维能力和动手能力,对新鲜事物充满好奇心。
教学要求:注重理论与实践相结合,关注学生个体差异,提高学生的动手实践能力和创新能力。
通过课程目标的分解与实现,使学生在知识、技能和情感态度价值观方面得到全面提升。
二、教学内容1. 四足动物运动原理:介绍四足动物的运动特点、步态分类及运动学参数。
- 教材章节:第二章“四足动物运动学基础”2. 四足机器人结构与功能:讲解四足机器人的基本结构、驱动方式和传感器应用。
- 教材章节:第三章“四足机器人结构与设计”3. 四足运动控制算法:学习四足运动控制的基本算法,如PID控制、模糊控制等。
- 教材章节:第四章“四足运动控制算法与应用”4. 步态生成与调节:分析四足机器人步态生成与调节的方法,以及不同步态对运动性能的影响。
- 教材章节:第五章“步态生成与优化”5. 编程实践:利用Arduino、Python等编程语言,实现四足机器人的运动控制。
四足行走机构说明书

四足行走机构说明书Revised on November 25, 2020机械创新设计课程设计2014-2015第 2 学期姓名:何燕飞、郑义、陈斌、周鹏、陈海云班级:机越一班指导教师:李军方轶琉成绩:日期:2015 年 6 月 4 日仿生四足行走机器人行走机构的研究摘要马相对于其它四足哺乳动物来说,躯体较大,四肢骨骼坚实有力,其运行步态稳健轻快,能在地面、坡地和凸凹不平的地表上自由灵活的快速行走,且可远距离行走。
因此,本课题研究了马在平地的步态运动方式,根据马步态设计的仿马四足行走机构为解决:在凹凸不平的路况上抢险救灾物资和装备的运输问题上将产生深远的影响。
本课题以马为研究对象,对其有障碍路况行走步态方式进行了研究。
马型四足行走机器人的运动学方程是一组非线性方程,没有通用的解法,通常很难求得运动学方程解的解析表达式。
采用几何解法,把空间几何问题分解成若干个平面几何问题,这样,不用建立运动学方程,而直接应用平面几何的方法进行运动轨迹规划,给出各个关节角给定量的计算方法。
本课题在分析总结了马的生理特性、运动步法和步态特点的基础上,从结构仿生角度出发,研究了行走机构的设计方案、运动原理、运动特点,确定了仿马四足行走机构,并应用 CATIA 软件建立了单腿和整机的三维模型。
关键词:马型四足行走机构、腿部结构、运动轨迹规划、三维建模The bionic quadruped walking robot mechanism researchABSTRACTComparing with other four feet mammals, Horses have many advantages including the bigger body, the stronger and the vibranter limb bones, long distance walking, so the horses can walk flexibly on the bumpy ground, the sloping fields, the mountains and the steep cliffs. Therefore, the motion pattern of goats gait on the upslope and downslope were researched. According to the horse gait, the bionic horse sloping walking mechanism was designed in order to solve the sloping walking problems of the agricultural machinery, which will have far-reaching effects on the design of the bionic mechanism.Horses were used as research object in the topic, and the sloping walking gait style was kinematics equations with nonlinear characteristic of horse type four legs walking robot have not been universal solutions. It is difficult to resolving express of robot kinematics geometrical method which space geometry problem is turned to some plane geometry problem is trajectory plan of motion can be made directly by plane geometrical method and kinematics equations need not set more method of calculation For Each Join Tangle Is simulation is researched for robot kinematics solutions and inverse of the design method is verified by virtue of experiment.KEY WORDS:Horse quadruped walking mechanism, the structure of the legs, trajectory planning, three-dimensional modeling目录第1章设计的目的随着科学技术的发展,仿生学与其他学科相互渗入,科学家对各类生物体的研究也越来越重视。
创意之星之四足机器人---精品管理资料

大学专业实践课题:四足追光机器人姓名:学院:机械工程学院专业:机械设计制造及其自动化班级:学号:指导教师:四足追光机器人一、实验目的用“创意之星"机器人套件组装可以进行追光行走的四足机器人;二、实验套件(创意之星)1。
机械结构:基本结构件、舵机动力关节、可转向轮子、机械爪等;2.控制系统:控制卡、舵机、直流电机、各类传感器、电源等;3。
控制软件:NorthSTAR 图形化开发环境三、实验步骤1、确定其基本功能基本功能:a.在平地上通过步态设计,可以正常迈步行走.同时头部传感器检测前方光源,便于及时调整运行动作,追光行走。
b.当左侧红外线传感器检测到光源强于右侧红外线传感器检测到的光源时,机器人运行步态会改变,控制机器人左转.右侧的光源强于左侧的光源时用同样的原理控制机器人右转。
c.当两侧均检测到光源亮度相等时,调整步态,追光机器人会向前走。
直至检测不到光源停止,再控制向后退.2、机构设计整个巡视机器人由大致三个模块组成:a。
由8个舵机组成四足机器人的4条腿模块;b。
由2个舵机组成四足机器人尾部部分;c。
由2个红外接近传感器和1个舵机组成的感应模块。
3、机构的装配整个四足避障机器人由1个控制板,1个舵机和两个红外接近传感器组成可转动头部,8个舵机组成主要的4条机械腿,由两个舵机构成尾部部分。
整个四足机器人共由11个舵机、两个红外接近传感器及“创意之星”机器人零部件组成。
安装可分为零件的安装,部件的组装以及最后的总装过程。
根据预先设计好的机器人结构方案,组装四条腿的部件、头部、尾部以及机器人主体部分,最后组装到一块,形成完整的整体结构.4、连接电线由于我们此次使用的是创意之星的标准套件,舵机接线、传感器模拟与数字端口的连接都及其方便简单.5、设置各个舵机的限制参数一方面保护所使用器件的性能,防止过载或错误操作而将其损坏;另一方面也为我们进行各种复杂的调试做良好的准备,能够顺利的完成设计任务。
pan四足仿生课程设计

pan四足仿生课程设计一、课程目标知识目标:1. 学生能理解仿生学的基本概念,掌握四足仿生机器人的结构和原理;2. 学生能了解四足仿生机器人在现实生活中的应用,并与所学知识进行关联;3. 学生能掌握与四足仿生机器人相关的物理、数学及工程学知识,为后续学习打下基础。
技能目标:1. 学生能通过小组合作,运用所学知识设计并搭建一个简单的四足仿生机器人模型;2. 学生能运用编程软件,实现对四足仿生机器人的基本控制;3. 学生能在实践中发现问题、解决问题,提高创新思维和动手能力。
情感态度价值观目标:1. 学生通过本课程的学习,培养对仿生学、机器人技术等领域的兴趣和热情;2. 学生在小组合作中,学会沟通、协作,培养团队精神和责任感;3. 学生能认识到科学技术在生活中的应用,增强对科技创新的信心和责任感。
课程性质:本课程为实践性、综合性课程,结合物理、数学、工程学等多学科知识,旨在培养学生的创新思维和动手能力。
学生特点:六年级学生具备一定的知识储备和动手能力,对新鲜事物充满好奇,喜欢探索和挑战。
教学要求:注重理论与实践相结合,充分调动学生的积极性,引导学生在实践中学习、思考,提高解决问题的能力。
教学过程中,关注学生的个体差异,激发学生的潜能,使每位学生都能在课程中收获成长。
二、教学内容1. 仿生学基本概念:通过课本第二章“仿生学的奥秘”,使学生了解仿生学定义、发展历程及研究方法。
2. 四足仿生机器人结构与原理:结合课本第三章“四足动物的运动原理”和第四章“仿生机器人的设计”,让学生掌握四足仿生机器人的结构组成、工作原理及关键部件。
3. 四足仿生机器人应用案例:参照课本第五章“仿生机器人在生活中的应用”,介绍四足仿生机器人在各领域的实际应用,提高学生的认知。
4. 机器人模型设计与搭建:依据课本第六章“动手制作四足机器人”,引导学生运用所学知识,分组设计并搭建四足仿生机器人模型。
5. 编程与控制:结合课本第七章“四足机器人的编程与控制”,教授学生使用编程软件,实现对四足仿生机器人的基本控制。
四足机器人设计方案书

浙江大学“海特杯”第十届大学生机械设计竞赛“四足机器人”设计方案书“四足机器人”设计理论方案自从人类发明机器人以来,各种各样的机器人日渐走入我们的生活。
仿照生物的各种功能而发明的各种机器人越来越多。
作为移动机器平台,步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人。
四足机器人在整个步行机器中占有很大大比重,因此对仿生四足步行机器人的研究具有很重要的意义。
所以,我们在选择设计题目时,我们选择了“四足机器人”,作为我们这次比赛的参赛作品。
一.装置的原理方案构思和拟定:随着社会的发展,现代的机器人趋于自动化、高效化、和人性化发展,具有高性能的机器人已经被人们运用在多种领域里。
特别是它可以替代人类完成在一些危险领域里完成工作。
科技来源于生活,生活可以为科技注入强大的生命力,基于此,我们在构思机器人的时候想到了动物,在仔细观察了猫.狗等之后我们找到了制作我们机器人的灵感,为什么我们不可以学习小动物的走路呢,于是我们有了我们机器人行走原理的灵感。
为了使我们所设计的机器人在运动过程中体现出特种机器人的性能及其运动机构的全面性,我们在构思机器人的同时也为它设计了一些任务:1. 自动寻找地上的目标物。
2. 用机械手拾起地上的目标物。
3.把目标物放入回收箱中。
4. 能爬斜坡。
图一如图一中虚线所示的机器人的行走路线,机器人爬过斜坡后就开始搜寻目标物体,当它发现目标出现在它的感应范围时,它将自动走向目标,同时由于相关的感应器帮助,它将自动走进障碍物中取出物体。
二.原理方案的实现和传动方案的设计:机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。
根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。
四足机器人扰动抑制及轨迹跟踪控制

跟踪控制2023-11-08contents •四足机器人概述•四足机器人的扰动抑制控制•四足机器人的轨迹跟踪控制•四足机器人控制系统的设计和实现•四足机器人实验和性能评估•四足机器人未来的发展趋势和挑战目录01四足机器人概述四足机器人是一种仿生机器人,其结构类似于四足动物,如狗或猫等。
定义四足机器人具有稳定性和灵活性,能够在复杂环境中进行行走、奔跑和跳跃等动作。
特点四足机器人的定义和特点国际发展四足机器人在国际上已经得到了广泛的研究和应用,许多公司和实验室都在开发和改进四足机器人的技术。
国内发展国内在四足机器人领域的研究和应用相对较少,但近年来也逐渐得到了重视和发展。
四足机器人的发展现状四足机器人在军事领域中有广泛的应用,如侦察、探测、排爆等任务。
军事应用民用应用科研领域四足机器人在民用领域也有很多应用,如救援、运输、服务等领域。
四足机器人也是科研领域中的重要研究对象,其研究涉及机械、电子、计算机等多个学科领域。
03四足机器人在各领域的应用020102四足机器人的扰动抑制控制扰动抑制的基本原理扰动抑制是通过调整系统的输入或输出,以减小扰动对系统性能的影响。
在四足机器人中,扰动可能来自外部环境(如风、地面冲击)或内部因素(如机器人的不平衡、部件磨损)。
扰动抑制控制器设计应基于对扰动类型和来源的深入理解,以确保有效性和鲁棒性。
由于机器人移动速度快,风速变化可能导致机器人偏离预定轨迹。
风扰动地面硬度、坡度、障碍物等变化可能导致机器人姿态失衡。
地形扰动不平衡力矩、惯性冲击、摩擦等内部因素可能导致机器人运行不稳定。
机器人内部扰动四足机器人的扰动类型和来源扰动抑制控制策略和方法通过传感器实时监测机器人的姿态和位置,根据偏差调整控制输入以减小扰动影响。
基于反馈的控制策略鲁棒控制自适应控制混合控制设计具有鲁棒性的控制器,以抵抗不同类型和强度的扰动。
根据环境变化动态调整控制策略,以适应不断变化的扰动情况。
结合多种控制方法以实现更优的扰动抑制效果。
XX项目四足机器人关键性能目标

只考虑空旷 平地摔倒后
M空R载S情1 况下,分别用10、20、30N的力对正常行
走机的器机马器开马机各静部止分站进立行,干在扰rec,o测ve试ry整(机A)抗,干分扰别能以以
1机0器、马20开、机30静、止4站0k立g,,1m在单站摆立4(5°X,)自,分由别冲以击以机1器0
★
、20、30、40kg,1m单摆45°,自由冲击机器马
跨越
跳跃
低趴
04-能量管理(续航、能耗、充电) √ 04.01 续航能力(时间、里程)
原地踏步续航时间-(空载) 原地踏步续航时间-(满载、10、20、30kg) walk行走续航时间-空载 walk行走续航里程-空载 walk行走续航时间-(满载、10、20、30kg) walk行走续航里程-(满载、10、20、30kg) trot行走续航时间-空载 trot行走续航里程-空载 trot行走续航时间-(满载、10、20、30kg) trot行走续航里程-(满载、10、20、30kg) 骑乘续航时间-30kg 骑乘续航里程-30kg 综合场景路况续航时间-(空载、满载)
ET2
竞品机型
最大坡度(向上前进)-walk(空载+满载)
最大坡度(向上前进)-trot(空载+满载) 最大坡度(向下前进)-walk(空载+满载) 最大坡度(向下前进)-trot(空载+满载) 最大坡度(向上后退)-walk(空载+满载) 最大坡度(向上后退)-trot(空载+满载) 最大坡度(向下后退)-walk(空载+满载)
1)机器人额定负载,位于3°,6°或者10°坡的初 始位置; 2)机器人沿坡道直线行走,达到最大速度; 3)参考额定速度的测方法测试坡上最大速度; 4)测试条件同额定速度的测试。
四足机器人运动及稳定控制关键技术综述
四足机器人运动及稳定控制关键技术综述目录一、内容概览 (2)1. 四足机器人概述 (3)2. 研究背景与意义 (4)3. 研究现状和发展趋势 (5)二、四足机器人运动原理及结构 (7)1. 四足机器人运动原理 (8)1.1 动力学模型建立 (9)1.2 运动规划与控制策略 (10)2. 四足机器人结构组成 (11)2.1 主体结构 (13)2.2 关节与驱动系统 (14)2.3 感知与控制系统 (17)三、四足机器人运动控制关键技术 (19)1. 运动规划算法研究 (20)1.1 基于模型预测控制的运动规划算法 (21)1.2 基于优化算法的运动规划策略 (22)2. 稳定性控制策略研究 (23)2.1 静态稳定性控制策略 (25)2.2 动态稳定性控制策略 (26)3. 路径规划与轨迹跟踪控制技术研究 (27)3.1 路径规划算法研究 (28)3.2 轨迹跟踪控制策略设计 (29)四、四足机器人稳定控制实现方法 (31)1. 基于传感器反馈的稳定控制方法 (32)1.1 传感器类型与布局设计 (34)1.2 传感器数据采集与处理技术研究 (35)2. 基于优化算法的稳定控制方法应用探讨 (37)一、内容概览四足机器人运动机制:阐述四足机器人的基本运动模式,包括行走、奔跑、跳跃等,以及不同运动模式之间的转换机制。
稳定性分析:探讨四足机器人在运动过程中的稳定性问题,包括静态稳定性和动态稳定性,以及影响稳定性的因素。
运动控制关键技术:详细介绍四足机器人运动控制的关键技术,包括运动规划、轨迹跟踪、力控制等,以及这些技术在实现机器人稳定运动中的应用。
传感器与感知技术:介绍四足机器人运动及稳定控制中涉及的传感器与感知技术,包括惯性测量单元(IMU)、激光雷达、视觉传感器等,以及这些技术在机器人运动控制中的作用。
控制算法与策略:探讨四足机器人运动及稳定控制中常用的控制算法与策略,包括基于模型的控制、智能控制方法等,以及这些算法在实际应用中的效果。
四足机器人步态及运动控制

发展阶段
随着科技的进步,尤其是计算机技 术和机械设计的发展,四足机器人 在20世纪90年代进入快速发展阶 段。
创新阶段
近年来,随着人工智能和深度学习 技术的突破,四足机器人的智能化 程度越来越高,性能和应用领域也 得到了极大的拓展。
四足机器人的分类及特点
根据驱动方式
四足机器人可以分为液压驱动、气压驱动和电动驱动等类型。液压驱动具有负载能力强、精度高的优点,但易受 环境温度影响。气压驱动具有速度快、响应灵敏的优点,但易受气压波动影响。电动驱动具有节能环保、维护方 便的优点,但需要良好的电源管理系统。
步态选择的原则与影响因素
选择四足机器人的步态应根据具 体的应用场景和需求进行考虑。
原则上,应考虑机器人的运动效 率、稳定性、灵活性和适应性等
方面的需求。
影响因素包括机器人的重量、负 载、能源供应、环境条件等。
03
四足机器人的运动控制方 法基于模型ຫໍສະໝຸດ 控制方法模型预测控制(MPC)
利用机器人的动力学模型进行预测和控制,考虑了机器人运动的各种约束条件 ,如速度、加速度、关节角度等,以达到最优的控制效果。
基于学习的控制方法
深度学习控制
利用深度学习算法,通过对大量数据进行学习,让机器人能够自适应各种复杂的 未知环境。
强化学习控制
通过强化学习算法,让机器人在实际环境中通过自我试错进行学习,从而找到最 优的控制策略。
04
四足机器人的步态及运动 控制实验
四足机器人实验平台介绍
实验平台组成
四足机器人实验平台主要由机械系统、控制系统、感知系 统三部分组成。
混合步态则结合了静态和动态步态的 特点,以实现机器人的特定运动需求 。
四足机器人实验报告

四足机器人实验报告四足机器人实验报告--报告人:郑泽丰施定邦严肖朋 2014年9月13日目录一、实验目的 (1)二、实验设备 (1)三、实验原理 (2)四、实验步骤 (2)五、调试与改进 (3)六、实验总结 (3)七、专业规划 (4)附录 (5)一、实验目的将所给器材组装成四足机器人,然后对其进行调试(硬件和软件),使其能在尽可能短的时间内穿越曲线形赛道,到达终点。
二、实验设备硬件部分:老师所配的一套器材(一个AVR控制主板,一个下载器,八个数字舵机,一套Lego机器人组件,两个红外电子眼,若干螺丝螺帽,一把电工钳)软件部分:North-star和用于程序调试三、实验原理通过North-star对数字舵机进行编程,确定四足机器人各个脚的初末位置,然后使其循环往复,通过红外的传感功能使得机器人在遇上障碍物时能调整步伐并拐弯,实现避障功能,最终到达终点,完成任务。
四、实验步骤1.将所给Lego组件组装成四足机器人,在身体四周对称分布四只机器脚,在身体前方对称分布两只红外电子眼,组成四足机器人雏形。
之后自由发挥,对不满部分进行拆卸和重新安装。
2.先构想机器人的行进步态,然后上机用North-star对四足进行调试,取得合适的角度和速度,然后下载程序到主板上,拆除导线后接通电源观察其直行方式,反复试验后,取得较好步态。
3.之后在赛道上借助于红外眼调试拐弯步态,不断调整电子眼的识别最大距离,获得理想步态。
4.最后在实验赛道上测试走完全程的时间,根据机器人表现规范其动作方式,尽量缩短所用时长,达到最佳状态。
五、调试与改进1.由于接线顺序的不规范,导致烧毁一个舵机,损失较大,之后注意到接线的低级错误,舵机没有被再次烧毁。
2.在设计机器人行进步态时,我们设想的步态与实际步态相差过大。
我们预期想将机器人设计成为螃蟹的行走方式,但是步态难于调节,加上这样的步态会使电子眼一直对着赛道一侧,导致机器人经常碰撞赛道,所以不可取,最后采取两侧脚交替行进方式。
四足机器人综述课件
四足混合结构式
混合结构式机器人可在复杂地形条件下以多种行进步态和多种运动 方式完成特殊的机动任务。近些年来其研究得到国内外广泛的关注。
广濑实验室的Roller-Walker是一种轮腿式四足机器人,采 用被动轮驱动时其可以实现滑行步态。
Roller-Walker
国立台湾大学的轮腿式Quattroped机器人,轮腿之间 可实现相互变换以适应不同地形。
Patrush-II 四足机器人
Tekken IV 四足机器人
最具有代表性的四足机器人是美国卡耐基美隆大学的 Boston dynamics 实验室研制的BigDog和 LittleDog
最近Boston dynamics 实验室又正在研发wildcat机器人, 其时速度将可能达到50英里
意大利IIT 大学研制的HyQ 机器人,有一米高,重约 90kg,12个自由度,由液压和电机混合控制。
wildcat
HyQ
斯坦福大学研制的仿生Stickybot机器人,使用定向粘合 材料制成的脚掌可以垂直爬行墙壁,或是玻璃,塑料等。
美国范德堡大学研制的由12个气缸驱动的四足机器人。
韩国成均馆(Sungkyunkwan) 大学的MRWALLSPECT III机器人可以行走和爬壁。
Stickybot
MRWALLSPECT III
哈工大研制了一种轮足复合运动的四足智能移动机器人,该机器 人可以步行前进,原地转弯,楼梯爬越,也可在良好路面利用足底轮以 较高速度滚动前进。
Thank you!
常规四足式
➢Text ➢Text ➢Text
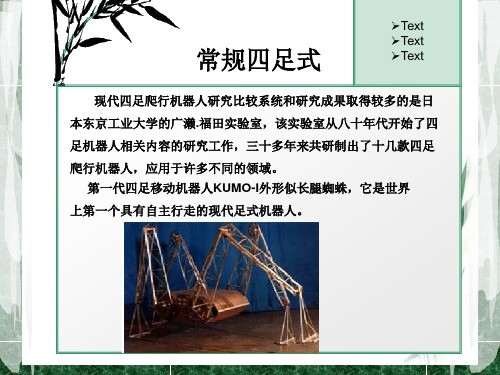
现代四足爬行机器人研究比较系统和研究成果取得较多的是日 本东京工业大学的广濑.福田实验室,该实验室从八十年代开始了四 足机器人相关内容的研究工作,三十多年来共研制出了十几款四足 爬行机器人,应用于许多不同的领域。
四足机器人

2
1.平面并联五杆机构
单足装配模型示意图
3
2.液压驱动足式机器人腿部
足式机器人腿部的机构简图 足式机器人的运动实质上是由EF,IG,JH之间的滑块机构和AE之 间的转动副,驱动AB杆绕A点转动,BC杆绕B点转动,CD绕C点转 动,AE绕Z轴转动,从而使D点相对地面运动,达到行走目的。
4
3.四足机器人1
步行腿结构示意图
四足步行机器人机械本体结构
弹性驱动式实施方案:步行腿中的并联驱动机构和串联驱动机构均采 用伺服电机弹性驱动器驱动,整个动力全部来自电机。
5
4.四足机器人2
四足机器人单腿结构图
机架组件 5、大腿组件 3 和弹性小腿组件 1。 机架组件与大腿组件之间通过髋关节 4 相连, 大腿组件与弹性小腿之间通过膝关节 2 相连。
6
5.仿马四足机器人
股关节由绕前后轴方向旋转的股横关节 和绕左右轴方向旋转的股纵关节构成; 膝关节仅设置绕左右轴方向旋转的股纵 关节。出于减少腿部关节数、简化机器 人结构模型的目的,该四足机器人的腿 部不设置足关节,而采用球形足趾。虽 然对其做了简化, 四足机器人的腿部仍 然能够以任意的角度接地。
液压驱动足式机器人腿部4足式机器人腿部的机构简图足式机器人的运动实质上是由efigjh之间的滑块机构和ae之间的转动副驱动ab杆绕a点转动bc杆绕b点转动cd绕c点转动ae绕z轴转动从而使d点相对地面运动达到行走目的
四足机器人
1.平面并联五杆机构
平面并联五杆机构
步行机构模型
常转速电机提供机械系统所需要的大部分功率,以微机控制的伺服电 机作为机械系统的运动调节,调节其输出运动。二种形式的电机输入 运动经一个多自由度机械系统进行运动合成产生所需要的输出运动。 系统的柔性取决于混合机构的形式和尺度。
四足机械课程设计
四足 机械课程设计一、课程目标知识目标:1. 学生能够理解并掌握四足机械的基本结构及其功能,包括腿部机构、身体框架和驱动系统。
2. 学生能够描述四足机械在生物模仿学中的应用,并列举不同类型的四足机器人和其设计特点。
3. 学生能够解释四足机械行走原理,包括步态控制、平衡调节等关键概念。
技能目标:1. 学生能够运用基础的机械设计原理,通过小组合作设计一个简单的四足机械模型。
2. 学生能够运用所学的知识,对四足机械模型进行运动分析和优化,提升模型的运动性能。
3. 学生通过动手制作与测试,学会使用工具,培养解决问题的实践能力和团队协作能力。
情感态度价值观目标:1. 学生培养对机械工程领域的兴趣,增强对科技创新的认识,激发发明创造的欲望。
2. 学生在学习过程中培养耐心、细致的科学态度,学会面对困难和挑战时不轻言放弃。
3. 学生通过小组合作,培养集体荣誉感和团队合作精神,学会相互尊重与支持。
课程性质:本课程为实践性强的机械设计课程,旨在通过四足机械的设计与制作,让学生在实践中学习与应用相关知识。
学生特点:考虑学生年级特点,注重培养动手能力与团队协作精神,同时引导他们探索机械工程领域的奥秘。
教学要求:教师需提供明确的设计要求和指导,鼓励学生创新思维,同时确保学生在学习过程中的安全。
通过分解课程目标为具体的学习成果,为教学设计和评估提供明确的方向。
二、教学内容1. 引入四足机械的基本概念,介绍四足机械的发展历程及其在现实生活中的应用。
相关教材章节:第一章 机械设计与生活2. 讲解四足机械的基本结构,包括腿部机构、身体框架、驱动系统等组成部分。
相关教材章节:第二章 机械结构与功能3. 分析四足机械的行走原理,包括步态控制、平衡调节等关键知识点。
相关教材章节:第三章 机械运动原理4. 案例解析:介绍不同类型的四足机器人和其设计特点,分析其在实际应用中的优缺点。
相关教材章节:第四章 机器人设计与分析5. 动手实践:指导学生运用所学的四足机械设计原理,分组设计并制作一个简单的四足机械模型。
智能巡检四足机器人-2023最新标准

智能巡检四足机器人1范围本文件规定了电机行业巡检四足机器人(以下简称机器人)的分类、系统组成、技术要求、检验规则及标志、包装、运输、贮存。
本文件适用于电机行业巡检领域应用的四足机器人设计、制造、检验。
2规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,仅注日期的版本适用于本标准。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T191包装储运图示标志GB/T4208外壳防护等级(IP代码)GB/T5226.1机械电气安全机械电气设备第1部分:通用技术条件GB/T17626.2电磁兼容试验和测量技术静电放电抗扰度试验GB/T17626.3电磁兼容试验和测量技术射频电磁场辐射抗扰度试验GB/T17626.8电磁兼容试验和测量技术工频磁场抗扰度试验GB/T20138电器设备外壳对外界机械碰撞的防护等级(IK代码)GB/T26154-2010装配机器人通用技术条件GB/T27544-2011工业车辆电气要求GB/T37242-2018机器人噪声试方法3术语和定义本文件没有需要界定的术语和定义4系统组成机器人系统由电源管理系统、导航系统、电机驱动系统、运动控制系统、通信系统、人机交互系统、视觉检测系统等组成,见图1。
图1系统组成5技术要求5.1机器人本体5.1.1外观要求机器人外观应符合以下要求:a)表面不应有明显的凹痕、划伤、裂缝、变形和污渍;b)表面应色泽均匀,不应有起泡、龟裂、脱落和磨损现象;c)金属零部件不应有锈蚀;d)按钮、指示灯、插座等应有明确标志;e)应有标牌和/或产品铭牌;f)应有涉及安全相关的明确警示标志。
5.1.2结构要求机器人结构应符合以下要求:a)应按照制造商批准的设计图样和工艺文件进行制造;b)应布局合理,装配方便,易于维修保养;c)零部件配合可靠,紧固部分无松动。
关键紧固部位做划线标志;活动部位润滑良好;减振可靠;液压连接可靠;d)安全防护装置应连接可靠,功能正常;e)具有足够的强度,静载承受1.25倍额定负载,测试15min后,无永久性变形和损坏;f)不能有造成危险的锐边或棱角;g)开关、按钮、手柄等装置的位置合理、操作方便。
四足行走机构说明书

机械创新设计课程设计2014-2015第2 学期姓名:何燕飞、郑义、陈斌、周鹏、陈海云班级:机越一班指导教师:李军方轶琉成绩:日期:2015 年6 月4 日小组成员:何燕飞、郑义、陈斌、周鹏、陈海云:机器人的四足行走机构创新设计仿生四足行走机器人行走机构的研究摘要马相对于其它四足哺乳动物来说,躯体较大,四肢骨骼坚实有力,其运行步态稳健轻快,能在地面、坡地和凸凹不平的地表上自由灵活的快速行走,且可远距离行走。
因此,本课题研究了马在平地的步态运动方式,根据马步态设计的仿马四足行走机构为解决:在凹凸不平的路况上抢险救灾物资和装备的运输问题上将产生深远的影响。
本课题以马为研究对象,对其有障碍路况行走步态方式进行了研究。
马型四足行走机器人的运动学方程是一组非线性方程,没有通用的解法,通常很难求得运动学方程解的解析表达式。
采用几何解法,把空间几何问题分解成若干个平面几何问题,这样,不用建立运动学方程,而直接应用平面几何的方法进行运动轨迹规划,给出各个关节角给定量的计算方法。
本课题在分析总结了马的生理特性、运动步法和步态特点的基础上,从结构仿生角度出发,研究了行走机构的设计方案、运动原理、运动特点,确定了仿马四足行走机构,并应用 CATIA 软件建立了单腿和整机的三维模型。
关键词:马型四足行走机构、腿部结构、运动轨迹规划、三维建模2/ 322013届工程机械专业(机越一班)机械创新设计The bionic quadruped walking robot mechanism researchABSTRACTComparing with other four feet mammals, Horses have many advantages including the bigger body, the stronger and the vibranter limb bones, long distance walking, so the horses can walk flexibly on the bumpy ground, the sloping fields, the mountains and the steep cliffs. Therefore, the motion pattern of goats gait on the upslope and downslope were researched. According to the horse gait, the bionic horse sloping walking mechanism was designed in order to solve the sloping walking problems of the agricultural machinery, which will have far-reaching effects on the design of the bionic mechanism.Horses were used as research object in the topic, and the sloping walking gait style was studied.The kinematics equations with nonlinear characteristic of horse type four legs walking robot have not been universal solutions. It is difficult to resolving express of robot kinematics equations.A geometrical method which space geometry problem is turned to some plane geometry problem is researched.So trajectory plan of motion can be made directly by plane geometrical method and kinematics equations need not set up.Further more method of calculation For Each Join Tangle Is puter simulation is researched for robot kinematics solutions and inverse solutions.Feasibility of the design method is verified by virtue of experiment.KEY WORDS:Horse quadruped walking mechanism, the structure of the legs, trajectory planning, three-dimensional modeling3/ 32小组成员:何燕飞、郑义、陈斌、周鹏、陈海云:机器人的四足行走机构创新设计目录第1章 (6)1.1设计的目的 (6)1.2设计的意义 (6)1.3设计应达到的技术要求 (7)1.4简述本课题在国内(外)发展概况及存在的问题 (7)1.4.1国外仿生四足机器人 (7)1.4.2国内仿生四足机器人 (8)1.5本设计的指导思想 (9)1.6阐述本设计应解决的主要问题 (9)1.7本设计采用的研究(计算)手段方式方法 (10)1.8本设计的技术路线: (11)第2章 (12)2.1设计方案论证 (12)2.1.1行走机构的运动原理 (12)2.1.2方案设计 (12)2.2机构的创新点 (16)2.3四足行走机构稳定性分析 (17)2.4静态稳定性 (17)2.4.1静态稳定性的一般描述 (17)2.4.2重心偏移对静态稳定性的影响 (17)2.5四足机器人的步态规划 (18)2.5.1步态的概念 (18)2.5.2步态规划及时序分析 (19)2.5.3步态的稳定性分析 (20)2.5.4步态的选择 (21)2.6理论计算 (21)4/ 322013届工程机械专业(机越一班)机械创新设计2.6.1动力学分析 (21)2.6.2足端轨迹分析 (22)1.6.3.水平电机和竖直电机运动方程的设计 (23)第3章结论及展望 (25)3.1 主要结论 (25)3.2未来展望 (25)谢辞: (26)参考文献 (26)5/ 32小组成员:何燕飞、郑义、陈斌、周鹏、陈海云:机器人的四足行走机构创新设计第1章1.1设计的目的随着科学技术的发展,仿生学与其他学科相互渗入,科学家对各类生物体的研究也越来越重视。
四足机器人课程设计

实验目的
·进一步了解“创意之星”标准版套件;
·初步学习足式机器人的不太规划;
·深入学习AVR控制器的使用方法;
·深入学习模拟量传感器的使用方法。
实验要求
·模仿四腿生物的行走方式,四条腿交替前进;
·能感知光源,并能转向光源,朝光源前进。
实验过程
1.任务分析与规划
·了解腿式机器人
·步态规划
·任务规划
2.搭建机器人
3.让四足机器人走起来
·四足机器人步态分析
设计前进、后退步态
设计转向步态
·编写步态
·让舵机跟踪光源
建立工程
添加变量
程序逻辑设计
等待延迟
最终的程序流程及对应源码
·让四足机器人跟踪光源
、
实验小结
本次试验我们进一步熟练的掌握了机器人ID的设置方法,并且通过对四足机器人的动作设计使其达到行走的效果,我们进行了小组讨论等形式,进一步掌握了机器人行走的工作原理,为编写程序提供了更清晰的思路,通过本次试验,我们更加熟练的掌握了NorthSTAR软件的应用,加深了对机器人学习的兴趣。
控制四足一个手臂
一、教材与学生情况分析
本课是《四足机器人》的第五节课。
学生再此之前了解四足机器人组装,但对四足的控制还是不熟,下面我们继续来控制四足机器人的手臂。
二、教学目的
1.了解四轴机器人的手臂的控制程序编写。
2. 温习ArduBlock程序编写控制舵机。
三、教学重难点
教学重点:ArduBlock控制手臂的程序编写,了解控制四足机器人的手臂动作分析。
教学难点:ArduBlock程序讲解,比较难理解和分析,所以就需要讲解的通俗易懂。
四、教学流程
1.引入新课
师:通过上节课同学们了解了机器人的组装我们知道如何去组装一个四足机器人,在此我们只是学会了组装,还没有控制四足机器人,那本课则是通过Arduino板控制四足机器人的一个手臂。
2.教学新课
(1)任务描述
1.利用已经组装好的四足机器人编写控制抬起手臂四足机器人,需要讲解控制思路,如何去编写代码,程序的编写思路,再来编写代码。
4.课堂总结
通过这节课的学习,我们基本掌握了多个舵机控制,和控制舵机在任意角度之间运动,那如何控制四足机器人前进呢?我们下节课继续学习。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《四足机器人的设计与制作》课程标准
一、课程名称
四足机器人的设计与制作
二、适用年龄范围
二年级以上
三、课程定位
《四足机器人的设计与制作》是一门将3d打印设计、舵机的单片机控制与仿生学动力原理相互结合的一门综合课程。
本课程以培养学生知识的综合运用能力为目的,在实践中发现问题并解决问题。
同时为后续创客课程打下坚实的基础。
1.这是一门综合运用机械、电子和数学知识的课程。
学生需要学会从顶层到底层的思考模式,即由最终爬行的四足机器人,拆分到每个环节应该如何去实现。
这是掌握任务设计思维的基础课程,同时对后续课程的进行起到至关重要的作用。
四、课程目标
1.知识与技能的目标
3D打印设计的学习与巩固
仿生动力学原理的了解与运用
舵机单片机控制原理的了解
2.个人素养的目标
空间思维能力与耐心的提高
观察能力与动手实践能力的提高
培养主动学习和深入学习的习惯
发现问题和解决问题能力的提升
五、课程设计
《四足机器人的设计与制作》课程主要以学生自行参与动手时间为主,在教学过程中,重点应该放在学生课堂的实践,采用实践与理论一体化的教学方式,使学生能够在做中学,学中玩。
课程设计思路如下:
(1)以课堂任务为载体,将教学内容融入其中,实现理论与实践一体化教学。
在基于项目式的教学过程中,学生是主要的行为者,全程实现小班化教学,学生以个体或者小组的形式,在老师的指导下完成任务。
老师需要根据学生每堂课的课堂表现和完成任务情况给予评价。
(2)基于项目式教学的基本方法如下:
引入:使用视频、游戏、图片等方式引出课程,明确教学任务,培养学生从顶层到底层思考问题的能力。
设计制作:根据四足所涉及到的知识点进行教学任务的分解安排,首先使用3D打印设计制作机器人的机械部分,其次使用舵机控制板控制多个舵机联合运动,最后进行调试与运动。
拓展与运用:结合开源硬件Arduino和超声波传感器制作智能避障四足机器人。
学习结果评价:根据每堂课的表现和最终任务完成情况给予结果的综合评价。
并颁发
奖状。
六、具体课程安排如下:1.
2.课程具体描述。