第三章 连续转动群 2014..
群论-第三章 连续转动群 2011.12.7
O
(φ)
1 0 –1
Cz(φ)
9
反演: 反演:
, 由引理1, 由引理 , ∴ ◆含奇数个反演或镜面反射的操作对应的行列式为 –1。 。 正当操作: 正当操作: 非正当操作: 非正当操作: ; 。
10
引理2 引理2 证明: 证明:
的正交矩阵A对应一个定轴转动。 的正交矩阵 对应一个定轴转动。 对应一个定轴转动
所以 可作为SO(2)群不可约表示的基矢, 群不可约表示的基矢, 可作为 群不可约表示的基矢 的本征函数。 同时也是 和 的本征函数。 对某力学系统,先分析其对称性, 对某力学系统,先分析其对称性,若关于某轴旋转 对称,则角动量守恒, 对称,则角动量守恒,且态函数中必有因子项 。
22
θ
17
群的不可约表示和特征标系: 群的不可约表示和特征标系: 群是Abel群,不可约表示都是 维的。 维的。 群是 群 不可约表示都是1维的
两边对
求导: 求导:
18
(
)
即 而 ∴要求 不可约表示: 不可约表示: 特征标: 特征标:
19
SO(2)群:不同m值对应不同不可约表示,无穷多个。 群 不同 值对应不同不可约表示,无穷多个。 前面 但不能认为 ,这里 ,算符 ≠ 数。 ,
轴对称势场,能量也就具有轴对称性。 轴对称势场,能量也就具有轴对称性。 Cz(φ):φ是表征群元的一个连续参数。 : 是表征群元的一个连续参数。 与 , 类似, 类似,有 =?
ρ(φ) 为φ~ φ+∆φ范围内的群元密度。 范围内的群元密度。 范围内的群元密度
13
若
(无限小的
值)
是一个算符,称为无穷小算符。 是群元算符, 是一个算符,称为无穷小算符。 无穷小算符 是群元算符, 其一阶导数仍然对应一个算符( 其一阶导数仍然对应一个算符(该算符不一定是无穷 小量,起生成元作用)。 小量,起生成元作用)。 为有限值时, 为有限值时, 可写为 n为正整数 为正整数 当 时,
西工大教材-机械原理各章习题及答案
电动机所需的功率为
p = ρ • v /η = 5500 ×1.2 ×10−3 / 0.822 = 8.029(KW )
5-8 在图示斜面机构中,设已知摩擦面间的摩擦系数 f=0.2。求在 G 力作用下(反行程),此斜面 机构的临界自锁条件和在此条件下正行程(在 F 力作用下)的效率。 解 1)反行程的自锁条件 在外行程(图 a),根据滑块的平衡条件:
解 1 ) 取 比 例 尺 μ 1 = 1mm/mm 绘 制 机 构 运 动 简 图 ( 图 b )
(a)
2 )计算该机构的自由度
n=7
pι=9
ph=2(算齿轮副,因为凸轮与齿轮为一体) p’=
F’= F=3n-2pe-ph
=3x7-2x8-2 =1
G7
D 64 C
EF
3
9
B
2
8
A
ω1
b)
2-6 试计算如图所示各机构的自由度。图 a、d 为齿轮一连杆组合机构;图 b 为凸轮一连杆组合 机构(图中在 D 处为铰连在一起的两个滑块);图 c 为一精压机机构。并问在图 d 所示机构中, 齿轮 3 与 5 和齿条 7 与齿轮 5 的啮合高副所提供的约束数目是否相同?为什么?
C3 重合点继续求解。
解 1)速度分析(图 b)取重合点 B2 与 B3,有
方向 大小 ?
v vv vB3 = vB2 + vB3B2 ⊥ BD ⊥ AB // CD ω1lAB ?
D
C
3 d3
ω3
4
ω3 90°
2
B(B1、B2、B3)
ω1
A1 ϕ = 90°
2014信号习题集 (1)

第一章选择题1.x[n]是一离散信号,其意义是指( ) A n 取离散的值,而x[n]可以取任何值 B n 取连续的值,而x[n]可以取任何值 C n 取离散的值,而x[n]取离散值 D n 取连续的值,而x[n]取离散值2.已知信号x(t)如图所示,其表达式是( ) A u (t )+2u(t-2)-u(t-3) B u(t-1)+u(t-2)-2u(t-3) C u(t)+u(t-2)-u(t-3)D u(t-1)+u(t-2)-u(t-3)⒊ 以下各关系式描述了系统输入输出之间关系,是因果稳定的LTI 系统的是( ) A [][]∑-∞==nk k x n y B ()()ττd x t y t⎰∞-= C ()()1-=t x t y D ()()1+=t x t y4.]2[*]3[-+n n x δ的正确结果是:( )A ]2[]5[-n x δB ]2[]1[-n x δC ]1[+n xD ]5[+n x 5. 下列信号,属非周期信号的是( )A . 2j neB.2j teC.cos3nπ D.cos3tπ6.积分dt )t ()t (⎰∞∞--+212δ等于( );A .1.25B .2.5C .3 D. 57.判系统()[cos(3)]()y t t x t =不具有性质( )A .无记忆;B .时不变;C .因果;D .稳定系统填空题1. 按照信号自变量取值的连续性和离散性,可将信号分为 信号和 信号。
2. 已知信号)821cos(2)8sin()4cos(2][πππ+-+=n n n n x ,该信号的基波周期是 3. 离散时间复指数信号nj e ω必须满足条件: 才能成为周期性信号,其基波周期可以表示为: ;4. 已知信号[]2cos()2cos()428x n n n πππ=++,该信号的基波周期是 ;计算题1. (10分)已知某连续时间信号如图1所示。
a.绘出信号)24()(1t x t x -=的波形;b.若)(t x 的频谱是()X j ω,试用()X j ω表示信号1()x t 的频谱1()X j ω2.(6)已知某连续时间信号()x t 如图1所示,请按时移、反转、尺度变换顺序,依次绘图,最终得到信号(12)x t -的波形,要求对坐标系进行标注。
机械原理 第七版西北工业大学课后习题答案(7-11章)

第7章课后习题参考答案7—1等效转动惯量和等效力矩各自的等效条件是什么?7—2在什么情况下机械才会作周期性速度波动?速度波动有何危害?如何调节?答: 当作用在机械上的驱动力(力矩)周期性变化时,机械的速度会周期性波动。
机械的速度波动不仅影响机械的工作质量,而且会影响机械的效率和寿命。
调节周期性速度波动的方法是在机械中安装一个具有很大转动惯量的飞轮。
7—3飞轮为什么可以调速?能否利用飞轮来调节非周期性速度波动,为什么?答:飞轮可以凋速的原因是飞轮具有很大的转动惯量,因而要使其转速发生变化.就需要较大的能量,当机械出现盈功时,飞轮轴的角速度只作微小上升,即可将多余的能量吸收储存起来;而当机械出现亏功时,机械运转速度减慢.飞轮又可将其储存的能量释放,以弥补能最的不足,而其角速度只作小幅度的下降。
非周期性速度波动的原因是作用在机械上的驱动力(力矩)和阻力(力矩)的变化是非周期性的。
当长时问内驱动力(力矩)和阻力(力矩)做功不相等,机械就会越转越快或越转越慢.而安装飞轮并不能改变驱动力(力矩)或阻力(力矩)的大小也就不能改变驱动功与阻力功不相等的状况,起不到调速的作用,所以不能利用飞轮来调节非周期陛速度波动。
7—4为什么说在锻压设备等中安装飞轮可以起到节能的作用?解:因为安装飞轮后,飞轮起到一个能量储存器的作用,它可以用动能的形式把能量储存或释放出来。
对于锻压机械来说,在一个工作周期中,工作时间很短.而峰值载荷很大。
安装飞轮后.可以利用飞轮在机械非工作时间所储存能量来帮助克服其尖峰载荷,从而可以选用较小功率的原动机来拖动,达到节能的目的,因此可以说安装飞轮能起到节能的作用。
7—5由式J F =△W max /(ωm 2 [δ]),你能总结出哪些重要结论(希望能作较全面的分析)?答:①当△W max 与ωm 一定时,若[δ]下降,则J F 增加。
所以,过分追求机械运转速度的均匀性,将会使飞轮过于笨重。
②由于J F 不可能为无穷大,若△W max ≠0,则[δ]不可能为零,即安装飞轮后机械的速度仍有波动,只是幅度有所减小而已。
第循环群

17
变换群
A上的一一变换群:设E(A)是A上的全体一一变换构 成的集合,E(A)={f|f:AA为双射},则E(A)关于 变换的乘法构成一个群。
证:任取f,gE(A),则fgE(A). 变换的乘法就是函数
的合成,满足结合律。A上的恒等变换IA是一一变 换,是关于变换乘法的单位元。fE(A),f-1也是一
[n,r]定义:n与r的最小公倍数
性质:
[n, r]
nr
(n, r)
© Peking University
3
欧拉函数
欧拉函数(n):小于等于n且与n互质的正 整数个数。
例:n=12,小于等于12且与12互质的正整 数是1,5,7,11,因此(n)=4
© Peking University
例: 两个Z上的一一变换 f:ZZ,f(x) = x g:ZZ,g(x) = -x
© Peking University
16
变换的乘法
定义17.10 设f,g是A上的两个变换, f和g的合成称为f与g的乘积, 记作fg。
如果f和g都是A上的一一变换,则fg也是A上的一一变换。
© Peking University
第3节 循环群
循环群的定义 循环群的分类 生成元 子群 循环群的实例
© Peking University
1
循环群的定义及其分类
定义: G = <a> = {ak | kZ}, aG 称 G 为循环群,a 为 G 的生成元.
分类: 生成元的阶无限,则 G 为无限循环群 生成元 a 为 n 阶元,则 G={e,a,a2,…,an-1}为 n 阶循环群
9
关于子群定理的证明
机械原理(第七版) 孙桓主编 第3章
二、平面机构运动分析1.图示平面六杆机构的速度多边形中矢量ed代表,杆4角速度ω4的方向为时针方向。
题1图题6图2.当两个构件组成移动副时,其瞬心位于处。
当两构件组成纯滚动的高副时,其瞬心就在。
当求机构的不互相直接联接各构件间的瞬心时,可应用来求。
3.3个彼此作平面平行运动的构件间共有个速度瞬心,这几个瞬心必定位于上。
含有6个构件的平面机构,其速度瞬心共有个,其中有个是绝对瞬心,有个是相对瞬心。
4.相对瞬心与绝对瞬心的相同点是,不同点是。
5.速度比例尺的定义是,在比例尺单位相同的条件下,它的绝对值愈大,绘制出的速度多边形图形愈小。
6.图示为六杆机构的机构运动简图及速度多边形,图中矢量cd代表,杆3角速度ω3的方向为时针方向。
7.机构瞬心的数目N与机构的构件数k的关系是。
8.在机构运动分析图解法中,影像原理只适用于。
9.当两构件组成转动副时,其速度瞬心在处;组成移动副时,其速度瞬心在处;组成兼有相对滚动和滑动的平面高副时,其速度瞬心在上。
10.速度瞬心是两刚体上为零的重合点。
11.铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,个是相对瞬心。
12.速度影像的相似原理只能应用于各点,而不能应用于机构的的各点。
13.作相对运动的3个构件的3个瞬心必。
14.当两构件组成转动副时,其瞬心就是。
15.在摆动导杆机构中,当导杆和滑块的相对运动为动,牵连运动为动时,两构件的重合点之间将有哥氏加速度。
哥氏加速度的大小为;方向与的方向一致。
16.相对运动瞬心是相对运动两构件上为零的重合点。
17.车轮在地面上纯滚动并以常速v前进,则轮缘上K点的绝对加速度αK=αk n=V K n/KP。
---------------------------------------( )18.高副两元素之间相对运动有滚动和滑动时,其瞬心就在两元素的接触点。
---( )19.在图示机构中,已知ω1及机构尺寸,为求解C 2点的加速度,只要列出一个矢量方程a C2=a B2+a n C2B2+a t C2B2就可以用图解法将a C2求出。
14.2 旋转(教学课件)-七年级数学上册考试满分全攻略同步备课备考系列(沪教版2024)
例如,在右图中,三角形ABC绕点O按顺时针方向
旋转一个角度成为三角形A1B1C1,点O是旋转中心,
∠AOA1是旋转角.在三角形ABC的旋转中,点A与
点A1是对应点;线段AB与线段A1B1是对应线段,
它们的长度相等;∠BAC与∠B1A1C1是对应角,这
两个角的大小也相等.
在右图中,你还能找出其他的对应线段和
图,关键是要确定表示图形的“关键点”,找出这些点在
旋转后的对应点,并按照原图形顺序连接这些对应点.这
里,图形三角形ABC的“关键点”是顶点A、B、C,只
需画出它们绕点O旋转后的对应点A1、B1、C1,就可得到
所求的图形.
课本例题
例2 如图,已知点O与三角形ABC,画出三角形ABC绕点O按逆时针方向旋转45°
沪教版(2024)七年级数学上册 第十四章 图形的运动
14.2 旋转
目录/CONTENTS
学习目标
情景导入
新知探究
分层练习
课堂反馈
课堂小结
学习目标
1. 掌握旋转的有关概念及基本性质;(重点)
2. 能够根据旋转的基本性质解决实际问题.(难点)
情景导入
在日常生活中,我们会遇到图形的转动
新知探究
如图,电扇的叶片从位置A绕点O按顺时针方向转动150°,转动到
这样的运动叫作图形的旋转
定点 O 叫做旋转中心.
O
对
应
旋转角 点
120
旋转中心
P′
转动的角α叫做旋转角.(0°<α<360°)
如果图形上的点 P 经过旋转变为点 P',那么这两个点叫做这个旋转的对
应点.
【练一练】下列物体的运动是旋转的有 ②③⑤ .
连续转动到往复摆动的运动变换与实现机构

3连续转动到王复摆动的运动变换与实现机构及其的工作机构部分是往复摆动的例子也是比较多的。
实现连续转动到往复摆动的运动变换机构主要有曲柄摇杆机构、曲柄摇块机构、摆动从动件凸轮机构等。
图2-27为简图,对其进行机构设计后,可得到多种执行机构。
特别是图2-28所示鄂式破碎机是一个曲柄摇杆机构,运动由电动机传给带轮5,带动与带轮固联在一起的偏心轴2绕回转中心A旋转,偏心轴2带动鄂3运动。
由于在鄂3与机架1之间装有肘板4,从而使动鄂作复杂的摆动,不断挫挤矿石,完成碎矿工作。
鄂式破碎机是一个由机架1、主动件偏心轴2、从动件鄂3和肘板4组成的曲柄摇杆机构,当曲柄2为主动件时,曲柄2转一周,可使摇杆3往复摇动1次,即将原动机输出的来连续转动变成了工作机的往复摆动。
鄂式破碎机简图如2-29所示。
4连续转动到往复直线移动的运动变换与实现机构有很多机器都是以电动机作动力源的,二电动机输出的运动形式是连续的转动,当执行机构要求作直线运动时,这就需要将转动变成直线运动。
如图2-30所示,实现连续转动到往复直线移动的运动变换机构有曲柄滑块机构、正弦机构、凸轮机构、代或链传动机构、齿轮条传动机构、螺旋传动机构以及一些机构的组合。
(1)螺旋传动机构如图2-30g所示螺旋传动由螺杆和螺母组成,螺杆置于螺母中。
当转动螺杆时,螺杆上的螺旋沿着螺母的螺旋槽运动,从而将旋转运动变换为直线运动,同时传递运动及动力。
螺旋传动按其用途可分为三类:1)传力螺旋。
传力螺旋以传递动力为主,通常的紧固螺钉、螺母属于这一种。
它要求用较小的转矩螺旋(或螺母),从而使螺母(或螺旋)产生轴向运动和较大的轴向力,这个轴向力可以把两个物体牢固地连接在一起,也可以用来做各种施力的工作,如图2-31所示的千斤顶和压力机都是传力螺旋。
2)传导螺旋。
传导螺旋以传递运动为主,要求具有较高的运动精度,如机床刀架或工作台的进给机构。
3)调整螺旋。
调整螺旋用以调整移动构件和固定零部件间的相对位置,如车床尾座螺旋、螺旋测微器等。
(大学数学)群论讲义:第三章 点群
x
1
3
4个一维不可约不等价表示, 一个二维表示.
D4有三个三阶不变子群:
{E,C4,C42,C43}, {E,C42,C2(1) ,C2(3)}, {E,C42,C2(2) ,C2(4)}
D4有到二阶循环群的三个同态, 可得到D4的三个 一维非恒等不可约不等价表示
E
,
C4
,
C42
,
C43
,
C (1) 2
4. 第二类点群
■ 第二类点群可由第一类群构造。分为9类:
1) Cn∪I Cn= Cn{E,I},2n阶阿贝尔群,共有2n个 共轭类。
2)Dn∪I Dn = Dn{E,I} ,2n阶群。 3)T∪I T = T{E,I} ,24阶群,称为Th群。共有8个共
轭类。 4)O∪I O = O{E,I} ,48阶群,称为Oh群。共有10个
■ 由第一类点群可构造出第二类点群: 1) G=K∪IK=K{E,I} 2) G=K∪IK+
3. 第一类点群
■ 点群是群, 满足群的封闭性; 点群是有限群, 具有有限的元 素;第一类点群是SO(3)的子群, 群元具有SO(3)群元特点.
点群G的阶n和转动轴阶ni的关系.
l (1 1 ) 2(1 1),
i 1
ni
n
n ni 2
1) l是极点G轨道的个数, 同一轨道上的极点是具有相同阶数 ni的转动轴与球面的交点。
2)ni是第i条G轨道中极点对应的转动轴的阶。 3)n是点群G的阶数。
4)n/ni是第i条G轨道上点的个数。一个转动轴对应两个G轨 道点。
■ 第一类点群的分类. 5种可能情况:
1) l 2, n1 n2 n, n 2,3, 2) l 3, n1 n2 2, n3 n / 2, n 4,6, 3) l 3, n1 2, n2 3, n3 3, n 12 4) l 3, n1 2, n2 3, n3 4, n 24
3.3三维转动群的覆盖群
一、二维幺模幺正矩阵群SU(2) 二维幺模幺正矩阵群
二维幺模幺正矩阵(detR=1,R+R=RR+=1)的集合, 二维幺模幺正矩阵( )的集合, 按照普通矩阵的乘法,满足群的四个条件,构成群, 按照普通矩阵的乘法,满足群的四个条件,构成群,记 作SU(2)群 群 1. 群元素 对于群中任意元素u, 对于群中任意元素 ,它的矩阵元素满足
三、SO(3)与SU(2)同态关系 与 同态关系
1. 无迹厄米矩阵 无迹厄米矩阵X ♠泡利矩阵:无迹,厄米,幺正 泡利矩阵: 泡利矩阵 无迹,厄米, 泡利矩阵的实线性组合,仍是无迹,厄米矩阵 泡利矩阵的实线性组合,仍是无迹,
5
♠反之,任何二维无迹、厄米矩阵X,若只包含三个独立 反之,任何二维无迹、厄米矩阵 , 反之 实参数, 实参数,则可展开为泡利矩阵的实线性组合 ♠现取:组合系数为三维空间任一点 的三个直角坐标,即 现取: 的三个直角坐标, 现取 组合系数为三维空间任一点P的三个直角坐标
各相似变换之间差一个+1因此, 各相似变换之间差一个_ 因此,即所有相似变换矩阵为 因此 +u _ ♠ 将X、X’按泡利矩阵展开式代入它们的相似变换,则 、 ’按泡利矩阵展开式代入它们的相似变换,
uσ b u = ∑ σ a R ab
−1 a =1 3
^ 具体表达式代入 具体表达式代入, 将u(n,ω)具体表达式代入,通过直接计算 可得R矩阵 正是前面给出的形式) 矩阵( 可得 矩阵(正是前面给出的形式)
→ 其中, 的长度是ω,方向沿 方向沿n(θ,φ)方向 其中,ω 的长度是 方向沿^ 方向
ˆ n (θ, ϕ)
ω ω θω h 0 = cos , h1 = sin cos θ cos ϕ 2 2 ω ω h 3 = sin cos θ, h 2 = sin sin θ sin ϕ ϕ 2 2 ω ω r ˆ , ω) = 1⋅ cos − i (σ ⋅ n ) sin ˆ u (n 2 2 → 其中引入矢量σ代表 个泡利矩阵:无迹,幺正, 代表3个泡利矩阵 其中引入矢量 代表 个泡利矩阵:无迹,幺正,厄米 + + + 2 Trσ a = 0, σ a σ a = σ a σ a = 1, σ a = σ a , σ a = 1 r r 满足所有矢量的代数关系, 矢量 σ = ∑ ea σ a 满足所有矢量的代数关系,如矢量点乘
群论-三维转动群

物理学中的群论——三维转动群主讲翦知渐群论-三维转动群第四章三维转动群三维转动群的表示4.1 维转动群的表示§拓扑群和李群42§4.2轴转动群SO (2)§4.3 三维转动群SO (3)§4.4二维特殊幺正群SU (2)§4.1拓扑群和李群连续群的基本概念1拓扑群无限群分为分立无限群和连续无限群有关有限群的理论对于分立无限群来说几乎全部成立定义4.1 连续群的维数, a2, …, a n所标明连续群G的元素由一组实参数a1其中至少有一个参数在某一区域上连续变化,且该组参数对标明群的所有元素是必需的而且足够的则该组参数中连续参数的个数l 称为连续群的维数。
在具体的群中,参数的取法可能不唯一例子如下的线性变换T(a,b)x'= T(a,b)x = ax +b,a,b∈(-∞,+∞), a≠0构成的集合,定义其上的乘法为:T(a1,b1)T(a2,b2)x = T(a1a2, a1b2+b1)x,b b T封闭律是显然的逆元素为T-1(a,b) = T(1/a, -b/a) ,单位元是T(1,0)结合律也容易证明因此{T(a,b)}构成个连续群。
构成一个连续群。
由于群元素的连续性质,需要在群中引入拓扑由于群元素的连续性质需要在群中引入简单说拓扑是个集子集族简单地说,拓扑是一个集合以及它的子集族拓扑学研究的是某个对象在连续变形下不变的性质为简单起见,我们仅讨论其元素可与l 维实内积空间的某个子有对应关系的群有一一对应关系的群集Sl该子集称为参数空间定义4.2 拓扑群群元的乘法法则和取逆法则在群的所有元素处都连续的群,称为拓扑群定义4.3 简单群和混合群拓扑群G的任意两个元素x1和x2在参数空间中如果能用一条或者多条道路连接(道路连通),则该群的参数空间是连通的,该群称为连通群或简单群。
若群的参数空间形成不相连结的若干片,则该群称为混合群。
前者如三维转动群SO(3),后者如三维实正交群O(3)。
大学课程近世代数循环群与置换群讲义课件

(2)作映射 f : G → Z , f ( gk )=k ,
则 f 是同构,故 ( G,◦) ≅ (Z , + )。
大学课程近世代数循环群与置换群 讲义课件
二、置换群
定义7.3.3 设 S为集合,称映射τ : S →S 为 S上的
一个变换。变换即为集合S到S自身的一个映射。
而 1 2 1 2 4 3 4 3 5 5 1 2 1 2 3 3 4 4 5 5 1 1 2 2 4 3 4 3 5 5 (1)( 2 3) 4 (3)( 4 1)2
大学课程近世代数循环群与置换群 讲义课件
定理7.3.5 任意一个置换都等于若干个不含公共元 素的循环置换的复合。
例如, 1 32 63 44 18 52 65 77 8 (5)8 2 ()7 1 6 ()3 (1 4)3 2 ()4 5 6 ()8 7
大学课程近世代数循环群与置换群 讲义课件
例7.3.9 利用循环置换的方法,我们有 3次对称群 S3的元素可以表示为: (1), (12), (13), (23), (123), (132)。 4次对称群 S4的元素可以表示为: (1); (12), (13), (14), (23), (23), (34); (123), (132), (124), (142), (134), (143), (234), (243); (1234), (1243), (1324), (1342), (1423), (1432); (12)∘(34), (13)∘(24), (14)∘(23)。
通常还是用
1 2
2 3
3 1
来表示。
大学课程近世代数循环群与置换群 讲义课件
群论 第3章 转动群

相对于基点 C 的位移可以写成
定义映射
���⃗���������������(������) = ���⃗���������(������) − ���⃗���������(������) = ���⃗���������(���⃗���) − ���⃗���������(���⃗���)
���⃗���������(���⃗���) ≝ ���⃗���������(���⃗��� + ���⃗���) − ���⃗���������(���⃗���) 则
n1n2
n1n3
n1n2 n22 1 n2n3
n1n3
n2n3 。
n32 1
三维矩阵的恒等式
M3 trMM2 1 trM2 tr M2 M det M 1 0 , 2
trX n
0
,
t
rX
2 n
2 , det
Xn
0 ,给出
R* exp{T *} R ,
det R exp{trT} 1。 又 R 是幺正矩阵,可以用幺正相似变换对角化,
R Qdiag{1, ei , ei }Q1 ,
其中 Q 是幺正矩阵; R 的本征值模 1,又由于 R 是实矩阵,其本征值有一对互相复共轭,
另一个为 1。现在
2
转动的夏莱(Chasles)定理。 夏莱定理:刚体最一般位移可以分解为绕基点的转动和随基点的平移。
2. 角位移参数
三维欧氏空间 矢量内积 保内积不变的线性变换 三维实正交群O(3) ≝ {������|���̃��������� = ������3×3, ������������������ ∈ ������} 三维实特殊正交群SO(3) ≝ {������ ∈ O(3)| det ������ = 1},O(3) ≡ SO(3) ⊗ {1, −1} 自由度为 3。
(完整word版)组合数学第四版卢开澄标准答案-第四章

习题四4。
1。
若群G的元素a均可表示为某一元素x的幂,即a= x m,则称这个群为循环群.若群的元素交换律成立,即a , b G满足a b = b a则称这个群为阿贝尔(Abel)群,试证明所有的循环群都是阿贝尔群。
[证].设循环群(G,)的生成元是x0ÎG。
于是,对任何元素a ,b G,m,nÎN,使得a= x0m , b= x0n,从而a b = x0m x0n= x0m +n (指数律)= x0n +m (数的加法交换律)= x0n x0m(指数律)= b a故运算满足交换律;即(G, )是交换群.4.2。
若x是群G的一个元素,存在一个最小的正整数m,使x m=e,则称m为x的阶,试证:C={e,x,x2, ,x m—1}是G的一个子群。
[证].(1)非空性C :因为eÎG;(2)包含性C G:因为xÎG,根据群G的封闭性,可知x2, ,x m—1,(x m=)eÎG,故C G;(3)封闭性 a , b C a b C: a , b C,k,lÎN (0k〈m,0l〈m),使a = x k,b = x l,从而a b = x k x l = x(k+l)mod m C(因为0 (k+l) mod m〈m) ;(4)有逆元 a C a —1C: a C,kÎN (0k<m),使a = x k, 从而a -1= x m—k C(因为0 m-k < m)。
综合(1) (2)(3) (4),可知(C, )是(G, )的一个子群.4.3。
若G是阶为n的有限群,则G的所有元素的阶都不超过n。
[证]。
对任一元素xÎG,设其阶为m,并令C={e,x,x2,,x m-1},则由习题4.2.可知(C, )是(G, )的一个子群,故具有包含性C G。
因此有m = |C|£|G|= n所以群G的所有元素的阶都不超过n。
14代数系统-循环群12-7

例、设G是群 对于任意的a ∈G 令S={ an |n ∈Z } 证明S是G 的子群 证:按判定定理二来判断 对任意的an,am ∈S an(am)-1 = an(a-1)m =an-m n- m∈ Z 所以 an-m ∈S 如果a的阶是有限的(为r) 则 S={a,a2,a3,…ar} 由a的各次幂构成的子群称为由a生 成的子群,记为<a> 例:<Z,+>中由 <2>所生成的子群
例:有限阶<Z4,+4>是循环群 因为 0=10 1=11 2=12 3=13 0=30 1=33 2=32 3=31 生成元为1或3 设a是生成元 ∀ n∈ Z4 n=ak= ka mod 4 取n=1 有 1=ka mod 4 即 有s 使 4s+ka =1 可得出 a与4互质(a,4)=1 反之 (a,4)=1 互质 则有 4s+ta =1 1= ta mod 4 1=at mod 4 n∈Z ∀ n∈ Z4 n = 1n =(at)n = atn tn∈Z 在Z4中只有1、3与4互质 所以为生成元 Z20 的生成元为1、3、7、9、11、13、 17、19 得出的结论是否有一般的意义?
定理10.11 设G=<a>为循环群 1)若G是无限阶群,则G只有两 个生成元 a和a-1 2)若G是n阶循环群, 则G含有ψ(n)个生成元。 对于任何小于等于n且与n互素的 正整数r,ar是G的生成元 欧拉数:ψ(n)为 0…n-1中与n互质的数的个数 如n=9 与9互质的数有 ψ(9)={ 1,2,4,5,7,8} 推广:1、<Zn,+n>是循环群 其生成元的集合是: M={a | a ∈Zn 且(a,n)=1互质} 2、素数阶的群 <Zn,+n>中 除幺元以外的所有元素均为 生成元
大物习题答案第3章连续物体的运动

⼤物习题答案第3章连续物体的运动第3章连续物体得运动⼀基本要求1 理解描写刚体定轴转动得物理量,并掌握⾓量与线量得关系。
2 理解⼒矩与转动惯量概念,掌握刚体绕定轴转动得转动定律。
3理解⾓动量概念,掌握质点在平⾯内运动以及刚体绕定轴转动情况下得⾓动量守恒定律。
4理解刚体定轴转动得转动动能概念,能载有刚体绕定轴转动得问题中正确得应⽤机械能守恒定律。
5了解流体得特点,掌握理想流体得概念。
6掌握理想流体得连续性⽅程与伯努利⽅程。
7了解伯努利⽅程得应⽤。
⼆基本概念1连续介质在宏观⼒学得范围内如果能忽视物体内部得不连续性,把物体瞧作质量连续分布得质点系。
2刚体⼤⼩与形状得变化可以忽略得连续介质。
3对定轴得⼒矩:⼒得⼤⼩与点到⼒得作⽤线得垂直距离得(⼒臂)乘积。
或=r×F4转动惯量转动惯量就是描述刚体在转动中惯性⼤⼩得物理量。
对于质点系得转动惯量。
如果物体得质量就是连续分布得,上式可写为。
5 质点得⾓动量质点对固定点O得位⽮为,质点m对原点O得⾓动量为6冲量矩⼒矩与作⽤时间得乘积,记作。
7刚体定轴转动得⾓动量8⼒矩得功9⼒矩得功率10刚体得转动动能11流体处于液态与⽓态得物体得统称。
特点就是物体各部分之间很容易发⽣相对运动,即流动性。
12理想流体绝对不可压缩与完全没有黏性得流体。
13定常流动流体流经空间任⼀给定点得速度就是确定得,并且不随时间变化。
在流速较低时定常流动得条件就是能够得到满⾜得。
14流线为了形象地描述流体得运动,在流体中画出⼀系列曲线,使曲线上每⼀点得切线⽅向与流经该点流体质点得速度⽅向相同, 这种曲线称为流线。
15流管在定常流动中,通过流体中得每⼀点都可以画⼀条流线。
由流线围成得管状区域, 就称为流管。
16流量单位时间内流过某⼀截⾯得流体体积, 称为流体流过该截⾯得体积。
三基本规律1刚体定轴转动⾓量与线量得关系=R = R2转动定律刚体绕定轴转动时,刚体得⾓加速度与所受得合外⼒矩成正⽐,与刚体得转动惯量成反⽐,。
2024届湖南省株洲市高三下学期一模考试高效提分物理试题
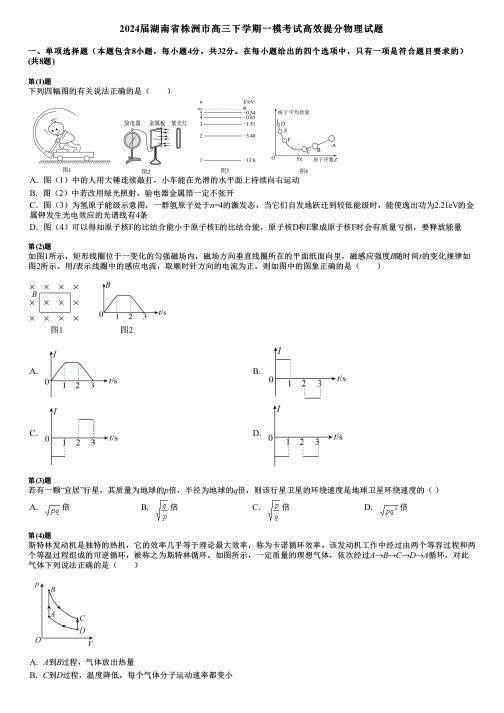
2024届湖南省株洲市高三下学期一模考试高效提分物理试题一、单项选择题(本题包含8小题,每小题4分,共32分。
在每小题给出的四个选项中,只有一项是符合题目要求的)(共8题)第(1)题下列四幅图的有关说法正确的是( )A.图(1)中的人用大锤连续敲打,小车能在光滑的水平面上持续向右运动B.图(2)中若改用绿光照射,验电器金属箔一定不张开C.图(3)为氢原子能级示意图,一群氢原子处于n=4的激发态,当它们自发地跃迁到较低能级时,能使逸出功为2.21eV的金属钾发生光电效应的光谱线有4条D.图(4)可以得知原子核F的比结合能小于原子核E的比结合能,原子核D和E聚成原子核F时会有质量亏损,要释放能量第(2)题如图1所示,矩形线圈位于一变化的匀强磁场内,磁场方向垂直线圈所在的平面纸面向里,磁感应强度B随时间t的变化规律如图2所示。
用I表示线圈中的感应电流,取顺时针方向的电流为正。
则如图中的图象正确的是( )A.B.C.D.第(3)题若有一颗“宜居”行星,其质量为地球的p倍,半径为地球的q倍,则该行星卫星的环绕速度是地球卫星环绕速度的()A .倍B.倍C.倍D.倍第(4)题斯特林发动机是独特的热机,它的效率几乎等于理论最大效率,称为卡诺循环效率。
该发动机工作中经过由两个等容过程和两个等温过程组成的可逆循环,被称之为斯特林循环。
如图所示,一定质量的理想气体,依次经过A→B→C→D→A循环,对此气体下列说法正确的是( )A.A到B过程,气体放出热量B.C到D过程,温度降低,每个气体分子运动速率都变小C.D到A过程,气体分子单位时间内与器壁单位面积碰撞的次数减少D.经过如图所示的一个斯特林循环过程,气体从外界吸收热量第(5)题一简谐机械横波沿x轴正方向传播,波长为λ,周期为T.t=0时刻的波形如图甲所示,a、b是波上的两个质点.图乙是波上某一质点的振动图像.下列说法中正确的是 ( )A.t=0时质点a的速度比质点b的大B.t=0时质点a的加速度比质点b的小C.图乙可以表示质点a的振动D.图乙可以表示质点b的振动第(6)题在一次训练中,甲、乙两消防员用图示装置提起救援箱,救援箱提升到与两消防员所处的平台等高后,两人保持位置不动,甲缓慢释放手中的绳子、乙用一始终水平的绳子将救援箱缓慢向左拉动,最后将救援箱拉至乙所在位置,拿到救援箱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
3. 圆球 绕过球心的任意转轴,旋转任意角度,均是对称 操作,全体操作构成 SO(3)群或 R(3)群。 (三维旋转群) 过球心平面镜面反射也是对称操作,与R(3)群操作 联合构成O(3)群。(三维全正交群,三维正交群,三维转动反演群) Ci = { E, I } I 与纯旋转操作对易,有 SO(3)⊗ Ci = O(3)
.
det ( A‒I0 ) = 0 ,有非零解。
11
设解为 x0,y0 ,z0 ,并定义
,
可见,矢量 为旋转操作A的转轴。
12
第二节 定轴转动群 SO(2)
一、群元表达式
SO(2) 群的群元:Cz(φ),φ是表征群元的连续参数。 φ → 0 时,
χ 称为无穷小算符(并非无穷小量,起生成元作用)。
A为正交矩阵:
;
.
由全体3维正交变换(矩阵)构成的群称为三维全 正交群,O(3)群。
SO(3)群是Special orthogonal group .
O(3) = SO(3) Ci , Ci = { e, I } . O(3):三维旋转反演群。 ⇨ n维全正交群 O(n)
7
旋转、反射在实空间中对应着正交算符 Â ,
以(ê 1, ê 2, ê 3)为基,有:
, (正交矩阵性质)
8
引理 1. 三维实空间中,纯旋转操作所对应正交矩阵 A 的行列式等于 1 。
z
φ
O
证明:Cz(φ) → A ,det A = ������(φ) . φ 连续变化,则 A的矩阵元和行列式 也应连续变化。 Cz(0) → I0 ,������(0) = 1 . 反证法:设在某 φ 处,������(φ) = –1, 则必有φm ∊ (0, φ) ,使 ������(φm) = 0 , 而这违反 det A = ±1 . ∴ ������(φ) = 1 .
第三章 连续转动群
第一节 基本概念和定理
对称操作: 使物质体系所占空间位置不变的空间变换。 对称操作需满足两个基本条件: ① 任意两点间距离不变; ② 任意两向量间夹角不变。( ②点可由①点导出)
对称操作群: 对于一个物质体系,由该体系的所有对称操 作构成的集合。
1
对称操作类型: ① 旋转(rotation):绕固定轴(有向直线 )转某个 角度α ∊[0 ~ 2������),记作Ck(α) . ② 镜面反射(或镜象、反映) (mirror reflection): 镜面记作σ ,以 为法向量的平面,记作 . σh , σv 分别为垂直和通过主轴的镜面。 ③ 反演(inversion):有定点O,使任一向量OP 变成 OP′ 的操作,记作I . 点O 称为反演中心。反演与 镜面反射相互关联,其中一个是基本操作。
(反演 = 绕含反演中心的轴转 ������角再做关于 σh 的镜面反射, )
④ 平移(translation):体系中所有点沿相同方向移动 相同距离的操作,用矢量 表示(指向表方向,长度 表距离)。
2
◇ 点操作(point operation): 体系中至少有一点不动的对称操作,称为点对称 操作,简称点操作。包括旋转和镜面反射。
17
方程的解为 而
要求 不可约表示:
特征标: SO(2)群: • 不同m值对应不同不可约表示,无穷多个; • 群元、群元算符形式: ; • 不可约表示、特征标: ; • 不能认为 (算符 ≠ 数)。
18
◆ 特征标正交性定理: 有限群:
SO(2)群: 应有
ρ(φ)为 φ 处群元密度
若设ρ(φ) = g/2π ,则有
力学系统中的某力学量,若存在轴旋转对称,则沿此轴的 角动量守恒,且态函数中必有因子项 .
21
(群元算符的导数仍是算符)
φ为有限值时, ,n为正整数。 取n → ∞ , .
13
◇ χ 是反厄米算符: χ = χ + 证:Cz(φ)是幺正算符, φ → 0 时,可忽略 φ2 项,有 ∴ χ = χ+ . 定义 ,有 ,
.
◇ 不同线性空间中 χ 算符有不同的矩阵形式。 1. 三维实空间:φ → 0 时,
φ
14
∴
由 ,∴ ; . ;
χ 的变换矩阵形式:
• 该矩阵虽然奇异,但 SO(2) 群元 Cz(φ) 的表示矩阵 I0(3) + χ φ 不奇异。
15
2. χ 算符的另一种形式
一维函数空间(基 φ → 0 时, ):
θ
16
二、不可约表示和特征标
SO(2) 群是Abel群,不可约表示均1维,无穷多个。 对β 求导:
5
◇ 点操作的特点
设不动点为坐标原点,则点操作
不改变任意两矢量 , 间的相对位 置(保长、保角变换)。
α α
点操作对应一个算符 Â : 内积
满足此关系的变换是保长、保角变换
O
由 有 变换算符Â 及对应矩阵A是幺正的。
6
三维实空间中,变换Â 不会将实矢量变成复矢量,
∴ Â是实变换,结合幺正性,表明Â是正交算符,
◇ 空间操作(space operation): 由平移操作实现,体系中所有点发生同方向同距 离的移动。 例: 1. C3v 群:仅含点操作。
3
2. 花瓶 • 有旋转对称轴; • 旋转任意角度不变,无限多个 对称操作; • 角度������旋转操作:Cz(φ)
所有Cz(φ)操作构成一个Abel群,称为SO(2)群或 R(2)群。
19
(1)经典力学中,物体处于二维势场 如果 具有绕 z 轴旋转对称性,
中, ,即
可见
= 常数,即
是守恒量。
20
(2)量子力学中: 算符在 作用下不变, 为本征函数, 两边乘以 : 是矩阵,也是本征值。
可见,旋转算符和哈密顿算符具有相同的本征函数。
所以
•
.
可作SO(2)群不可约表示的基(1维表示空间), 同时也是 和 的本征函数。
������(φ) φ 0
φm 1
Cz(φ)
–1
9
反演:
,
,
.
由引理1,
∴
,
.
◆含奇数次反演或镜面反射的操作对应行列式为 ‒1 .
正当操作: det A = 1; 非正当操作: det A = ‒1 .
10
引理 2. det A = 1 的正交矩阵A对应一个定轴转动。 证明:
∴
构造三元一次方程组: