基于单片机的PWM控制方法的精密温度控制设计
基于单片机的电阻炉温度控制系统设计

基于单片机的电阻炉温度控制系统设计一、引言电阻炉是一种广泛应用于工业生产中的加热设备,其温度控制的准确性对于工艺过程的稳定和产品质量的保证至关重要。
本文将基于单片机设计一个电阻炉温度控制系统,通过采集温度传感器的信号,用单片机控制加热器的工作状态,实现对电阻炉温度的精确控制。
二、系统结构设计本系统由四个模块组成:温度采集模块、温度控制模块、显示模块和控制模块。
1.温度采集模块:使用一个高精度的温度传感器,如PT100,将电阻炉内部的温度转化为电压信号。
该信号经过模拟转数字转换器(ADC)转换为数字信号,传输给单片机。
2.温度控制模块:根据温度采集模块传输的信号,单片机通过PID算法计算出控制值,并输出PWM信号控制加热器的工作状态。
PID算法可根据实际情况进行参数调整,以达到系统稳定的控制效果。
3.显示模块:采用数码管或液晶显示器显示当前电阻炉的温度值,方便操作员实时监测电阻炉的运行状态。
4.控制模块:可以通过按钮或者触摸屏等方式进行设定和调整控制参数,例如设定温度范围、PID参数调节等。
三、系统工作原理1.系统初始化:单片机启动后,进行相应的外设初始化和参数设定,包括温度采集模块的配置、PID参数的设定、显示模块的显示等。
2.温度采集与转换:通过温度传感器采集电阻炉内部的温度信号,将其转化为模拟电压信号。
利用ADC将模拟信号转换为数字信号,并传输给单片机进行处理。
3.PID算法计算:单片机根据采集到的温度值,通过PID算法计算出控制值。
PID控制算法通常包括比例系数(P)、积分系数(I)和微分系数(D)三个参数的调整,根据实际情况进行调节以达到控制精度和稳定性要求。
4.PWM输出控制:根据PID算法计算得到的控制值,单片机输出对应的PWM信号。
该信号通过驱动电路控制加热器的工作状态,调整和维持电阻炉的温度。
5.温度显示:单片机将当前的温度值通过显示模块进行显示,使操作员能够实时监测到电阻炉的温度。
基于STM32单片机的温度控制系统设计

基于STM32单片机的温度控制系统设计一、本文概述本文旨在探讨基于STM32单片机的温度控制系统的设计。
我们将从系统需求分析、硬件设计、软件编程以及系统测试等多个方面进行全面而详细的介绍。
STM32单片机作为一款高性能、低功耗的微控制器,广泛应用于各类嵌入式系统中。
通过STM32单片机实现温度控制,不仅可以精确控制目标温度,而且能够实现系统的智能化和自动化。
本文将介绍如何通过STM32单片机,结合传感器、执行器等硬件设备,构建一套高效、稳定的温度控制系统,以满足不同应用场景的需求。
在本文中,我们将首先分析温度控制系统的基本需求,包括温度范围、精度、稳定性等关键指标。
随后,我们将详细介绍系统的硬件设计,包括STM32单片机的选型、传感器和执行器的选择、电路设计等。
在软件编程方面,我们将介绍如何使用STM32的开发环境进行程序编写,包括温度数据的采集、处理、显示以及控制策略的实现等。
我们将对系统进行测试,以验证其性能和稳定性。
通过本文的阐述,读者可以深入了解基于STM32单片机的温度控制系统的设计过程,掌握相关硬件和软件技术,为实际应用提供有力支持。
本文也为从事嵌入式系统设计和开发的工程师提供了一定的参考和借鉴。
二、系统总体设计基于STM32单片机的温度控制系统设计,主要围绕实现精确的温度监测与控制展开。
系统的总体设计目标是构建一个稳定、可靠且高效的环境温度控制平台,能够实时采集环境温度,并根据预设的温度阈值进行智能调节,以实现对环境温度的精确控制。
在系统总体设计中,我们采用了模块化设计的思想,将整个系统划分为多个功能模块,包括温度采集模块、控制算法模块、执行机构模块以及人机交互模块等。
这样的设计方式不仅提高了系统的可维护性和可扩展性,同时也便于后续的调试与优化。
温度采集模块是系统的感知层,负责实时采集环境温度数据。
我们选用高精度温度传感器作为采集元件,将其与STM32单片机相连,通过ADC(模数转换器)将模拟信号转换为数字信号,供后续处理使用。
基于单片机的PWM控制方法的精密温度控制设计
基于单片机的PWM控制方法的精密温度控制设计惠州学院HUIZHOUUNIVERSITY毕业论文(设计)中文题目:基于单片机的PWM控制方法的精密温度控制系统设计英文题目:Design of Precise Temperature Control System Based on PWM Control Method ofMicroprocessor姓名:姚佑鹏学号: 090701224专业班级:09电气工程及其自动化2班指导教师:李卫平提交日期: 2013-05-15教务处制摘要本文设计了一种以单片机STC89C52为核心的精密温度控制系统。
它使用一线制数字温度传感器DS18B20采集温度,并通过四位数码管显示实时温度。
通过设置按键,设定恒温运行时的温度值,并显示在数码管上。
单片机采用PID控制算法对测量值和设定值进行处理,计算输出PWM波控制继电器调节发热电路的发热功率,最终控制被控对象温度。
通过原理分析,软硬件设计及实验调试,温度能够实时检测和自动控制,系统的温度控制精度可达到±0.5℃,表明该温度系统比较稳定并且精确,能够实现对温度的精密控制。
关键词:温度控制 MCS-52 DS18B20 PID PWMAbstractA precise temperature control system with the core of microprocessor STC89C52 is designed in this paper. In this system, one-wire digital thermometer DS18B20 is used to transform analog temperature signal to digital signal,through four real-time digital of a digital thermometer temperature.by setting the button,set the thermostat temperature at the time of operation, and digital display of the temperature.Single-chip Microcomputer used PID control algorithm to process the data measurement and data settings,and calculate the PWM signal, is outputted and magnified to drive a solid state relay so that the power of heat circuit is adjusted.Thus the temperature of the object can be control.Through many of theory, design and experiments, the temperature of real-time detection and automatic control test is reached,and the error of this system is ±0.2℃. It show that the system is precise and steady, and control precise temperature.Keywords: Temperature control MCS-52 DS18B20 PID PWM目录1 前言 (1)2 设计理论基础 (2)2.1 PWM控制技术 (2)2.2 数字PID算法 (2)3 系统的方案设计 (4)3.1系统设计内容及要求 (4)3.1.1设计内容 (4)3.1.2设计要求 (4)3.2方案设计的比较与论证 (4)4 系统硬件电路的设计 (6)4.1单片机最小系统模块 (7)4.1.1 单片机STC89C52的简介 (7)4.1.2 单片机系统模块的硬件设计 (10)4.2 功能实现模块 (11)4.2.1 采样模块 (11)4.2.2 按键模块 (12)4.2.3 显示模块 (13)4.4 温度控制模块 (14)5 系统软件设计 (15)5.1 主程序模块 (15)5.2 功能实现模块 (17)5.2.1 温度采样子程序 (17)5.2.2 显示子程序 (17)5.3 运算控制模块 (18)6 系统调试 (19)6.1 Keil软件的简介 (19)6.2 Proteus软件的简介 (19)6.3 软件仿真 (20)6.4 硬件调试 (21)6.5调试结果 (22)7 结论 (24)致谢 (25)参考文献 (26)附录 (27)1 前言温度是众多行业生产中的基础参数之一,也是与人们生活息息相关的一个重要物理量。
基于单片机的直流伺服电机PWM控制系统课程设计

成绩运动控制系统课程设计题目: 基于单片机的直流伺服电机PWM控制系统院系名称: 电气工程学院专业班级: xxx 学生姓名: xxx 学号: xxxx 指导教师: 石庆生评语:摘要单片机是应控制领域应用的要求而出现的,随着单片机的迅速发展,起应用领域越来越广。
尽管目前已经发展众多种类的单片机,但是应用较广、也是最成熟的还是最早有Intel开发的MCS-51系列单片机(51系列单片机)。
51系列单片机应用系统已经成为目前主流的单片机应用系统。
直流电机脉冲宽度调制(Pulse Width Modulation—简称PWM)调速产生于20世纪70年代中期,最早用于自动跟踪天文望远镜,自动记录仪表等的驱动,后来用于晶体管器件水平的提高及电路技术的发展,PWM技术得到了高速发展,各式各样的脉宽调速控制器,脉宽调速模块也应运而生,许多单片机也都有了PWM输出功能。
而MCS—51系列单片机作为应用最广泛的单片机之一,却没有PWM 输出功能,本课设采用配合软件的方法实现了MCS—51单片机的PWM输出调速功能,这对精度要求不高的场合时非常实用的。
目录1、前言 (1)1.1单片机的发展史 (1)1.2本设计任务 (1)2、总体设计方案 (2)3、硬件电路设计 (2)3.1硬件组成 (2)3.2主要器件功能介绍 (3)3.2.1直流伺服电机简介 (3)3.2.2 PWM简介及调速原理 (4)3.2.3 传感器选择 (5)3.3电路组成 (6)3.3.1 晶振电路 (6)3.3.2 复位电路 (6)3.3.3 单相桥式整流电路 (7)3.3.4 调制电路 (7)4、系统软件设计 (8)4.1系统简介及原理 (8)4.2系统设计原理 (8)4.3程序流程图 (10)5、建模 (11)5.1控制框图 (11)5.2参数计算 (12)5.3PWM变换器环节的数学模型 (14)5.4仿真结果图 (14)总结 (16)参考文献 (17)附件1:汇编设计 (18)附件2: (20)1、前言1.1 单片机的发展史单片机作为微型计算机的一个重要分支,应用面很广,发展很快。
基于单片机的水温控制系统设计毕设答辩

2 研 究 内 容 RESEARCH CONTENTS
该系统主要包括传感器温度采集、A/D模数转换、按钮操 作、单片机控制、数码管数字显示等。采用PID算法实现温度 控制功能,通过串行通信完成两片单片机信息的交互,实现 温度的设定、控制和显示。本设计还可以通过串口与上位机 连接,实现计算机控制。为了实现高精度的水温控制,这种 单片机系统采用PID算法控制和PWM脉宽调制相结合的技术, 通过控制双向晶闸管改变电炉和电源的通断来改变水温的加 热时间。该系统由两个模块组成:键盘显示和温度控制。通过 模块之间的通信,完成温度设定、实时温度显示、水温波动 等功能。
基于单片机的水温控制系统设计
答 辩 人: 学 号:C来自NTENTS1 研究意义 2 研究内容 3 调试分析 4 课题总结
1 研 究 意 义 RESEARCH SIGNIFICANCE
现代的发展,就控制器本身而言,控制电路可以采用应 急经典控制理论和常规模拟控制系统,实现水温的自动统一。 然而,随着计算机和超大规模集成电路的迅速发展,以现代 控制理论和计算机为基础,由数字控制、显示、A/D和D/A转 换、后配额执行机构和控制阀组成的计算机控制系统在过程 控制中得到了越来越广泛的应用。此外,单片机的使用也使 水温的智能控制成为可能,并提供完善的人机交互界面和多 机通信接口,这些在常规的数字逻辑道路上往往难以或不可 能实现。
硬件电路的调试要依次调试单片机的基本系统、前向通 道和后向通道。调试时,可利用仿真器读写各接口地址,静 态测试电路各部分连接是否正确;对于动态过程,可以编写 一个简短的调试程序来配合硬件电路的调试。
3 调 试 分 析 DEBUG ANALYSIS
软件的调试需要在仿真器提供的单步、断点、跟踪等功 能的支持下对各子程序分别进行调试.将调试完的工程序连 接起来再调试.逐步扩大调试范围。 调试的过程一般是: A)测试程序输入条件或设定程序输入条件; B)以单步、断点或跟踪方式运行程序; C)检查程序运行结果; D)运行结果不正确时查找原因。修改程序,重复上述过程。
《2024年基于8051单片机的温度控制系统》范文

《基于8051单片机的温度控制系统》篇一一、引言随着科技的飞速发展,人们对各类生产与生活设备的智能性和精度要求不断提高。
其中,温度控制系统作为一种关键的工业和家庭自动化技术,已成为当今科学研究与技术应用的重点。
在众多的单片机技术中,基于8051单片机的温度控制系统因其实时性强、性价比高以及适应性强等优点而得到了广泛的应用。
本文旨在深入探讨基于8051单片机的温度控制系统的设计与实现过程。
二、系统概述基于8051单片机的温度控制系统是一种典型的自动化控制系统,该系统采用高精度的温度传感器进行实时检测,并将数据通过A/D转换器传输至8051单片机。
单片机根据预设的算法对数据进行处理,然后通过PWM(脉宽调制)或开关控制等方式对执行器进行控制,以达到调节温度的目的。
三、硬件设计1. 单片机选择:选用8051系列单片机作为核心控制单元,因其性能稳定、成本低、资源丰富等优点而成为行业内的主流选择。
2. 温度传感器:选择高精度的温度传感器进行实时检测,如DS18B20等。
3. A/D转换器:将传感器输出的模拟信号转换为单片机可以处理的数字信号。
4. 执行器:根据需要选择合适的执行器,如加热器、制冷器等。
四、软件设计软件设计是整个系统的核心部分,主要涉及单片机的编程和控制算法的实现。
1. 编程语言:采用C语言进行编程,因其具有代码可读性强、可移植性好等优点。
2. 控制算法:根据实际需求选择合适的控制算法,如PID (比例-积分-微分)控制算法等。
通过编程实现对温度的精确控制。
3. 人机交互:通过LCD显示屏等人机交互设备,实现对系统的实时监控和操作。
五、系统实现系统实现包括硬件连接、程序编写、调试与优化等步骤。
首先将硬件设备按照电路图进行连接,然后编写程序实现单片机的控制功能。
在调试过程中,需要不断优化控制算法和程序代码,以达到最佳的温控效果。
六、系统性能分析基于8051单片机的温度控制系统具有以下优点:1. 实时性强:能够实时检测温度并快速作出反应。
单片机PWM温度闭环控制系统设计
课程设计任务书目录1摘要 (3)2 引言 (4)3 设计内容与要求 (4)3.1设计内容 (4)3.2设计要求 (4)4 系统总体设计方案 (5)4.1 方案提出 (5)4.2 总体框图 (5)5 系统工作原理 (6)5.1 PID算法 (6)5.2 DS18B20 传感器工作原理 (8)6 系统硬件设计 (9)7 系统软件设计 (11)7.1程序设计组成 (11)7.2程序代码 (11)8 系统调试与测试结果 (21)9 测试结果分析 (21)10 结论和体会 (21)11 参考文献 (22)摘要:以温度控制系统为例研究嵌入式系统,实现了对工业现场的温度实时监测和控制。
以AT89C51单片机为控制核心,采用典型大惯性环节的PID 闭环控制装置,可自动控制恶劣环境下的温度,使被控对象温度保持在恒定范围内。
本系统温度信号由数字温度传感器DS18B20采集,送AT89C51单片机进行处理,并通过数码管显示。
当温度超过设定值范围后,单片机将发出控制信号启动升温装置或降温装置,使温度保持在一定的范围。
实验测试证明,设计的样机系统测温控温精度均为0.1℃,测温控温的范围可达-55~+125℃。
关键词:单片机;PID;工业控制;温度;DS18B202 引言温度的测量和控制在日常生活和工业领域中具有广泛的应用,随着人们生活水平的大幅提高,对温度测量控制的精度和范围也有着更高的要求。
在工业企业中,如何提高温度控制对象的运行性能一直以来都是控制人员和现场技术人员努力解决的问题,这类控制对象惯性大,滞后现象严重,存在很多不确定的因素,难以建立精确的数学模型,从而导致控制系统性能不佳,甚至出现控制不稳定、失控等现象。
PID控制方式控制稳定且精度高,但是控制对象的模型难以建立,并且当扰动因素不明确时,参数调整较复杂。
本文采用DS18B20数字温度传感器,该传感器具有微型化、封装简单、低功耗、高性能抗干扰能力、测量范围广、强易配处理器等优点,可使系统测量更加精确,电路更加简单。
温度控制单片机PWM输出设计
表1 LCD1602管脚功能
管脚
功能
1
VSS为电源地
2
VCC,5V电源正极
3
V0为液晶显示器对比度调整端
4
RS为寄存器选择,高电平1时选择数据寄存器、低电平0时选择指令寄存器。
5
RW为读写信号线,高电平(1)时进行读操作,低电平(0)时进行写操作。
6
E(或EN)端为使能(enable)端。
图3 主控芯片 STC12C5A60S2
2.4 LCD1602
1602液晶也叫1602字符型液晶,它是一种专门用来显示字母、数字、符号等的点阵型液晶模块。1602LCD是指显示的内容为16X2,即可以显示两行,每行16个字符液晶模块(显示字符和数字)。1602LCD微功耗、体积小、显示内容丰富、超薄轻巧,常用在袖珍式仪表和低功耗应用系统中。
2.6.2
温度的读取:
DS18B20在出厂时以配置为12位,读取温度时共读取16位,所以把后11位的2进制转化为10进制后在乘以0.0625便为所测的温度,还需要判断正负。前5个数字为符号位,当前5位为1时,读取的温度为负数;当前5位为0时,读取的温度为正数。
DS18B20的初始化:
1.先将数据线置高电平“1”。
DS18B20有4个主要的数据部件:
1.光刻ROM中的64位序列号是出厂前被光刻好的,它可以看作是该DS18B20的地址序列码。64位光刻ROM的排列是:开始8位(28H)是产品类型标号,接着的48位是该DS18B20自身的序列号,最后8位是前面56位的循环冗余校验码(CRC=X8+X5+X4+1)。光刻ROM的作用是使每一个DS18B20都各不相同,这样就可以实现一根总线上挂接多个DS18B20的目的。
基于PWM的温度控制器设计
(1)功能比较强、比较可靠,对外的干扰有很强的免疫能力
1.2 控温的现状
在实际的温度控制系统设计中温度测量和温度控制是我们必须要翻过去的两大座山无论你如何绕都绕不过去的,因而要提高温度控制系统的控温精准度就必须从这两个方面入手。
如今的温度检测设备多种多样也可以说五花八门发展趋势向多种手段、小体积、高精度等方面发展。但是如今新型的测温手段比如非接触式测温方法其测温精度不尽人意,它们只能应用在只是需要大概知道被测对象温度的场合。要想获得比较高的精度温度只能选择传统的较早出现的接触式测温方法比如热电阻、热电偶等,传统的测温手段技术比较成熟因而更加可靠价格可能也更低。但是传统的测温方法也不是没有缺陷的它往往会对被测对象产生或多或少的影响也就是人们所说的置入误差。应对置入误差各种不同的传感器都有自己相应的解决方法比如热电阻的引线接法、热电偶的冷端补偿,但这都会增加系统的复杂性和成本的上升。由此人们常常筛选温度传感器的时候要想的问题要比较全面要根据所要设计的系统要求价格考虑选择我们需要的测温传感器。
常规PID分为位置式和增量式,下面是介绍:
在应用单片机组建的系统中我们一般对测量值是采样采集信号的,所以这就要对信号做离散式处理。现将算式(3)化简为算式(4):
(3)
(4)
由此 可得:
(5)
(6)
其中: 为比例增益、 为积分增益、 为微分系数、Ki=(KcT)/Ti、Kd=(KcTd)/T
PID代表三个不同的环节这是大家都知道的,这也说明其容易被人们所认知、学习。介绍PID的书不是很高深比较被大家所理解,书中所讲的参数也很明了。再者PID算法适用的范围可以很广只需要有控制的领域它都能去占有自己的一席之地,对于过于简单或控制对象过于难的控制要求它不适用,也就是说对于一般的控制要求来说PID控制完全能胜任了。被测对象特性变化后用PID控制对其控制的效果也不会有什么影响。
PWM温控方案
PWM温控方案PWM温控方案(Pulse Width Modulation Temperature Control Scheme)是一种常见的温度调控方法,通过调节脉冲宽度来控制输出功率,从而实现对温度的精确控制。
本文将介绍PWM温控方案的原理、应用及其优缺点。
一、原理PWM温控方案的原理基于脉冲宽度调制技术,即通过改变脉冲的宽度来控制输出信号的占空比。
在温度调控中,PWM方案通过改变控制信号的占空比来控制加热器的工作时间。
占空比越高,加热器工作时间越长,温度上升越快;反之,温度下降速度会增加。
二、应用PWM温控方案在许多领域得到广泛应用,以下列举几个常见的应用场景:1. 电子设备散热控制:例如计算机、手机等电子设备,在高负荷运行时会产生大量热量,通过PWM温控方案可以实现精确的散热控制,避免设备过热而引发故障。
2. 温室控温:在温室种植中,温度对植物的生长非常重要。
PWM温控方案可以帮助维持恰当的温度,在不同的生长阶段提供适宜的温度环境,促进植物的生长发育。
3. 工业生产过程控制:许多工业生产过程需要在特定温度下进行,例如炼油、塑料加工等。
通过PWM温控方案,可以精确控制加热设备,确保生产过程稳定和产品质量。
三、优缺点PWM温控方案具有以下优点:1. 精确控制:通过改变脉冲宽度,PWM温控方案可以实现对温度的精确控制,适用于需要高度稳定的温度环境。
2. 节能高效:与传统的开关控制相比,PWM温控方案可以根据实时需求自动调整加热器的工作时间,从而提高能源利用效率。
3. 可靠性高:PWM温控方案具有较高的稳定性和可靠性,可以适应长时间运行的需求。
然而,PWM温控方案也存在一些缺点:1. 噪声干扰:PWM温控方案在调节过程中会产生脉冲信号,可能引起电磁干扰,对某些敏感设备或场景造成影响。
2. 电路复杂性:与传统的温度调控方法相比,PWM温控方案需要较为复杂的电路设计和控制算法,需要较高的技术要求。
3. 系统响应速度:由于PWM温控方案需要不断调整脉冲宽度,系统响应速度相对较慢,不适用于某些对温度快速变化要求较高的场景。
基于单片机的PWM调光控制系统的设计
中断服务程序编写
编写中断服务程序,实现定时器中断、外部中断等功能 。
ABCD
主程序编写
编写主程序,实现系统的初始化、PWM信号的输出等功 能。
算法设计
根据需求,设计相应的算法,如PID控制算法等,实现亮 度调节、平滑控制等功能。
05 实验与测试
实验环境与设备
单片机
采用常用的51单片机作为主控制器,如STC89C52。
系统总体设计
1 2
确定系统功能
根据需求,确定系统需要实现的功能,如调光控 制、亮度调节等。
选择单片机型号
根据系统规模和性能要求,选择合适的单片机型 号,如STM32、51单片机等。
3
设计系统架构
根据单片机型号和功能需求,设计系统的整体架 构,包括主控模块、PWM模块、输入输出模块 等。
硬件电路设计
[基于单片机的LED智能调光系统设计](https
///a/341150470_100110293)
[PWM调光原理及其在LED驱动中的应用](https
///xueyonggang/p/10753568.html)
THANKS FOR WATCHING
感谢您的观看
03
随着占空比的增加,LED灯的亮度逐渐增强;反之,随着占 空比的减小,LED灯的亮度逐渐减弱。
结果分析与讨论
3. 系统稳定性讨论
在长时间运行过程中,系统表现稳定,未出现异常发热或噪声问题。 这表明基于单片机的PWM调光控制系统设计合理,能够实现LED灯的稳 定调光控制。
06 结论与展望
结论总结
精度高
PWM调光具有高精度的调节能力, 能够实现光源亮度的精细调节。
稳定性好
由于PWM调光是通过调节脉冲宽 度来实现亮度调节的,因此能够保 持电流的恒定,从而使得光源亮度 更加稳定。
PWM温度自动控制系统的设计
《计算机控制技术》课程设计题目:PWM温度自动控制系统的设计学生姓名:学号:专业班级:指导教师:二○一○年十二月二十二日目录1. 课程设计目的…………………………………………………页码2. 课程设计题目的描述和要求…………………………………页码3. 课程设计报告内容……………………………………………页码4.结论……………………………………………………………页码1. 课程设计目的2. 课程设计题目的描述和要求2.1课程设计的要求和内容(包括原始数据、技术要求、工作要求)1. 要求设计温度控制系统,设定温度为230度,采用电阻丝作为加热器件,要求无余差,超调小,加热速度快。
2.硬件采用51系列单片机,采用固态继电器作为控制元件。
3采用keil c作为编程语言,采用结构化的设计方法2.2课程设计图纸内容及张数1.要求用protel设计出硬件电路图。
2画出系统控制框图。
3 画出软件流程图。
3. 课程设计报告内容3.1、设计概述3.1.1实现功能1、通过单片机实现温度控制系统,要求无余差,超调小,加热速度快。
2、给定可调节3.1.2系统控制框图程序模块3.1.3程序模块1、主程序2、AD转换程序3、pid计算程序4、延时程序5、定时器中断服务程序3.2 Protel硬件电路图3.3软件设计3.3.1设计流程图:主要程序流程说明:主程序首先进行初始化,包括pid参数设定,定时器设置,中断设置及赋初值。
然后循环做四件事:通过AD转换对反馈值采样,根据设定值减反馈值计算偏差进而计算输出值,根据输出值算出定时器初值,扫描给定按键刷新给定值。
通过不断循环改变定时器初值以改变占空比,实现PWM控制。
3.3.2程序#include <reg51.h>sbit A=P2^0;//模拟通道选择位sbit BB=P2^1;sbit C=P2^2;sbit ST=P2^4;sbit EOC=P2^5;sbit OE=P2^6;sbit P27=P2^7;//PWM脉冲输出sbit P10=P1^0;sbit P17=P1^7;void ad();//模数转换void pid();//pid计算int a=0,b=0,out=0;double p=0.4,i=0.1,d=0;//系数设定double s=0,e0=0,elast=0,in=200;void delay(long i)//延时{int j=255;while(i--){for(;j>0;j--);}}main(){A=BB=C=0;OE=1;TMOD=0x11;TH0=0xD8;TL0=0xF0;EA=1ET0=1;ET1=1;TR0=1;while(1){ad();//模数转换pid();a=(65535-out*39)/0x100;b=(65535-out*39)%0x100;//T1低8位 if(P10==0){ in++;delay(100);}if(P17==0){ in--;delay(100);}}}//模数转换void ad(){ST=0;ST=1;ST=0;//启动转换while(EOC==0); //等待转换结束}//pid计算void pid(){e0=in-P0;//偏差值out=p*(e0+i*s+d*(e0-elast));//由公式计算输出值s=s+e0;//累计偏差elast=e0;}void int0() interrupt 1 using 0//定时器0服务子程序 (interrupt 1 定时器0){TH0=0xD8;TL0=0xF0;//定时器0初值P27=1;//输出高电平TR1=1;//开定时器1TH1=a;//定时器1初值TL1=b;}void int3() interrupt 3 using 0//定时器1服务子程序{TR1=0;//关定时器1P27=0;//输出低电平}4、结论4.1、测试结果由于没有实物,只能进行仿真,但Proteus中找不到合适的模型,以下用电机代替加热器进行Proteus仿真,如下图:用Keil uVision3编写程序,经检查成功后,通过编译链接产生*.hex文件,并用Proteus 7.5设计绘制电路图,并将生成的*.hex文件导入芯片中,进行仿真。
一种基于单片机的PWM控制的温度控制器

一种基于单片机的PWM控制的温度控制器
余勇
【期刊名称】《中国仪器仪表》
【年(卷),期】1999(000)006
【摘要】本文介绍了基于单片机的PWM控制的温度控制器的设计和实现方法。
该温控系统采用8098单片机集中控制,具有调试方便,系统品质好,抗干扰性强等优点。
实验结果表明,温控精度可达±0.2℃。
【总页数】3页(P19-21)
【作者】余勇
【作者单位】东南大学仪器科学与工程系
【正文语种】中文
【中图分类】TK323
【相关文献】
1.一种基于单片机的抽油机SVPWM控制系统研究 [J], 高春侠;张磊;张加胜
2.一种量热恒温箱基于单片机的温度控制器 [J], 熊海林;陈香萍
3.基于单片机的PWM控制的温度控制器的研究 [J], 张春来
4.基于单片机实现的一种独特的PWM控制方法 [J], 平朝春;张加胜
5.一种微型高精度PWM温度控制器的设计 [J], 张华;龚义建
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机游泳池温度控制系统的设计

洛陽理工學院游泳池水温控制系统设计课程答辩王明超2014/12/29班级:B110411学号:B********姓名:***摘要随着人民生活的进步,恒温游泳池走进了我们的生活,而游泳池的保温控制器,它能自动控制游泳池的水温。
从而大大的方便了人们对游泳池水温恒温的需求。
本文对该测控仪系统进行了分析设计。
本游泳池恒温控制系统选用AT89C51单片机作为控制器,利用PID和PWM技术实现对游泳池的水温控制。
该控制系统主要由CPU主控制模块、主电源模块、键盘处理模块、温度采集模块、继电器控制模块及LED显示模块构成。
本游泳池恒温控制系统选用AT89C51单片机作为控制器,利用PID和PWM技术实现对游泳池的水温控制。
该控制系统主要由CPU主控制模块、主电源模块、键盘处理模块、温度采集模块、继电器控制模块及LED显示模块构成。
DS18B20用来采集温度信号,其体积小,精度高,适用电压宽,抗干扰能力强。
继电器控制两台电机的转动,分别对应控制热水阀和冷水阀,从而,实现水温的实时控制。
最后,采用共阳极数码管LG5641A动态显示水温。
关键词: AT89C51单片机,游泳池,温度控制,模糊控制。
Ⅰ目录第1章绪论 3 1.1选题的背景与意义 3 1.1.1自动控控系统可温度控制系统 3 1.2 温度控制系统的设计 3 第2章系统总体设计 4 2.1方案的选择 4 2.2系统总体设计 4 第3章硬件设计 5 3.1硬件选型 5 3.2硬件电路设计 5 3.2.1主电源电路 5 3.2.2温度采集模块 6 3.2.3按键输入电路 6 3.2.4继电器模块 7 3.2.5 显示模块 7 第4章软件设计 8 4.1系统程序设计 8 4.2各部分程序流程图 8 4.2.1. 计算温度子程序 9 4.2.2.按键处理子程序 9 4.2.3.计算温度子程序 10第5章仿真结果 12 5.2仿真结果 12 5.1本系统仿真 13 5.2仿真结果 13 结论 14 参考文献 15 附录 16第1章绪论1.1选题的背景与意义1.1.1自动控控系统可温度控制系统电子技术的发展,特别是随着大规模集成电路的产生,给人们的生活带来了根本性的变化,如果说微型计算机的出现使现代的科学研究得到了质的飞跃,那么单片机技术的出现则是给现代工业控制测控领域带来了一次新的革命。
基于单片机的PWM控制的温度控制器的研究
成 正 比) , 当温度达 到 7 5 ‘ C并大 于 7 5 ℃时 , 直 流 电动
机全速正转; 当 外部 温 度 小 于 等 于 1 0 l C时 , 加 速 反
时 钟 芯 片 DS 1 3 O 2是 美 国 DAL L AS公 司推 出 的一 种 高性 能 、 低功耗、 带 RA M 的实 时 时 钟 电路 , 它 可 以对 年 、 月、 日、 周 日、 时、 分、 秒进 行计 时 , 工作
1 温 度 控 制 器构 成
本 系 统 由单 片 机 芯 片 AT8 9 C 5 1 、 温 度 传 感 器
DS 1 8 B 2 0 、时 钟 芯 片 D S 1 3 0 2 、液 晶 显 示 屏
AT8 9 C 5 1是 一 种低 功 耗 、 高性能、 内含 4 K 字 节 闪 电存 储器 ( F l a s h Me mo r y ) 的 8位 C MOS微 控 制器 。 单 片 机工 作 的 时间 基 准 由时 钟 电路 提供 , 单 片 机 的
连 接方 便 等 优 点。采 用 单 总 线 数 据 传 输 方 式 , D S 1 8 B 2 0的数 据 I / O 口均 有 同一 条线 完 成 [ 1 ] , 其 引
脚 排列 如下 。
( 1 ) GND: 地信号 , 接地。 ( 2 ) D Q: 数 据输入/ 输 出引脚, 与 AT 8 9 C 5 1的
第 2 8卷第 2期 2 0 1 3年 2月
宿
州
学
院 学
报
Vo 1 . 2 8, No. 2
J o u r n a l o f S u z h o u Un i v e r s i t y
单片机指令的PWM信号生成和控制

单片机指令的PWM信号生成和控制PWM(Pulse Width Modulation)脉宽调制技术被广泛应用于单片机控制系统中。
PWM信号的生成与控制对于电机驱动、灯光调节、温度控制以及音频处理等应用起到了重要作用。
本文将重点探讨单片机指令的PWM信号生成和控制的原理、实现方法以及常见应用。
一、PWM信号生成原理PWM信号是一种以方波信号为基础的调制信号,信号的占空比(Duty Cycle)决定了信号的高电平和低电平时间比例。
单片机通过改变占空比来实现对设备的控制。
常见的PWM生成方式有两种:软件生成PWM和硬件生成PWM。
软件生成PWM是通过编程计算电平切换的时间来实现,适合频率较低的应用。
硬件生成PWM则是利用单片机内部的定时器/计数器模块来产生PWM信号,适合频率较高的应用。
二、软件生成PWM信号软件生成PWM信号的关键在于精确计算出高电平和低电平的时间,并进行相应的IO电平切换。
以下是软件生成PWM信号的基本步骤:1. 初始化计时器:选择合适的定时器,并设置计时器的计数模式、计数时间、时钟源等参数。
2. 设置占空比:根据实际需求,计算出高电平和低电平的时间比例,即占空比。
3. 确定周期:根据应用需求,确定PWM信号的周期,即一个完整的方波信号的时间长度。
4. 计算高电平和低电平时间:根据占空比和周期计算出高电平和低电平的时间。
5. 控制IO电平:根据计算得到的时间,控制IO引脚的高电平和低电平。
6. 循环生成PWM信号:根据设定的周期,循环生成PWM信号,以实现对设备的控制。
三、硬件生成PWM信号硬件生成PWM信号利用单片机内部的定时器/计数器模块来产生精确的PWM信号。
硬件生成PWM的好处在于能够减轻CPU的负担,提高系统的实时性和稳定性。
以下是硬件生成PWM信号的基本步骤:1. 选择合适的定时器:根据需求选择适合的定时器,通常定时器/计数器模块都支持PWM信号的生成。
2. 初始化定时器:设置定时器的计数模式、计数时间、时钟源等参数。
电热培养箱 c51单片机PWM温度控制系统
摘要本文设计了一个基于AT89S52单片机的电热培养箱温度控制系统,阐述了系统的工作原理、硬件电路以及软件设计。
详细论述了数字PID控制器的原理及其在温度控系统中的应用,将增量式PID和PWM脉宽调制技术相结合.此外本系统采用DS18B20 新型单总线数字温度传感器集温度测量和A/D 转换于一体,直接输出数字量,与单片机接口电路简单。
该系统经过实验,取得了较为满意的控制效果。
本系统由核心处理模块、温度采集模块、键盘显示模块、及控制执行模块等模块组成主要完成成对电热培养箱箱内的温度测量、显示;系统过热保护并报警;手动设置温度;温度智能调节等功能。
关键词:温度控制;AT89C51单片机; DS18B20;PID控制;PWM波ABSTRACTABSTRACTThis paper designed a microcontroller AT89S52-based electric incubator temperature control system, described the working principle of the system, the hardware circuit and software design. Discussed in detail the principles of digital PID controller and its application of temperature-control system will be incremental PID and PWM pulse width modulation techniques combined. Furthermore, this system uses DS18B20 new single-bus digital temperature sensor set of temperature measurement and A / D conversion in one, the direct output of digital with the microcontroller interface circuit is simple. The system is experimental, and achieved relatively satisfactory control effect.This system consists of the core processing module, the temperature acquisition module, keyboard display module, and control the implementation of modules modules Completed in pairs inside the main electric incubator temperature measurement, display; system over-temperature protection and alarm; manually set the temperature; temperature of intelligent regulation and other functions.Keywords: temperature control; AT89C51 microcontroller; DS18B20; PID control; PWM wave目录目录第一章引言 (1)1.1课题的背景和意义 (1)1.2 课题研究的内容 (1)第二章系统设计原理与方案论证 (2)2.1 系统设计总体框图 (2)2.2 总体方案的论证 (3)2.3 各部分电路方案的论证 (3)第三章核心处理模块 (5)3.1 A T89S52简介 (5)3.2 核心处理模块电路的整体设计 (5)3.3 I/O口的分配 (6)第四章键盘显示模块 (7)4.1 显示电路部分 (7)4.2 键盘电路部分 (10)第五章温度采集模块 (12)5.1 温度传感器DS18B20内部结构 (12)5.2 硬件连接 (13)5.3 软件实现 (13)第六章控制执行模块 (14)6.1 控制执行模块电路 (14)6.2 控制执行程序设计 (15)6.2.1 PWM波设计 (16)6.2.2 PID控制算法 (16)6.2.3 PID参数整定 (17)第七章其他电路设计 (19)7.1 电源电路 (19)7.2 系统过热保护电路 (19)7.3 报警控制电路 (19)结论 (20)参考文献 (21)致谢 (22)附录 (23)第一章引言第一章引言1.1课题的背景意义随着微电子技术和微型计算机的迅猛发展,微机测量和控制技术以其逻辑简单、控制灵活、使用方便及性能价格比高的优点得到了迅猛发展和广泛应用。
基于STM32的PID和PWM温度控制系统研究
精度电压稳压芯片 R F和电路调整 , E 使测温分辨率
能 够提 高到 0 1 0 0 C。 .0— .1o
集选用温度传感器 P 10 , T 00 好处为可做到高精度 ,
图 2 温度 采集 电路
2 1 年 3月 1 01 1日收 到
30 86
科
学
技
术
与
工
程
1 卷 1
1 2 升 温控 制 电路 .
@
2 1 SiT c. nn. 0 c. ehE g g 1
动 力 技 术
基 ቤተ መጻሕፍቲ ባይዱ
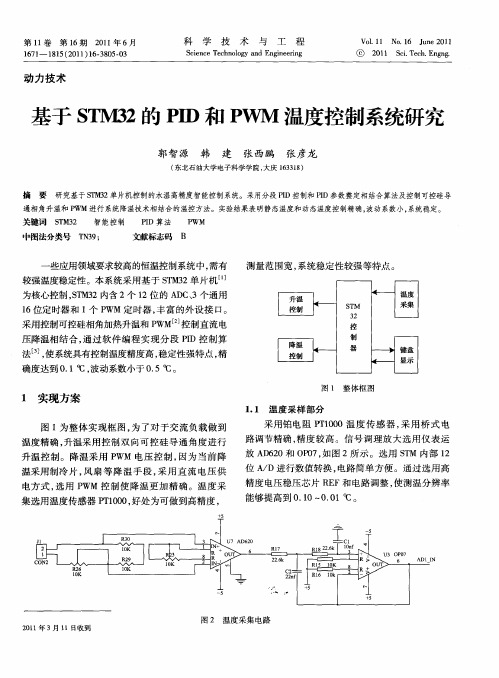
和P WM 温度控制系统研究
郭智源 韩 建 张 西鹏 张彦龙
( 东北石 油大学 电子科学学 院 , 大庆 13 1 ) 6 3 8
摘
要
研究基于 S M 2单片机控制的水温高精度智能控制系统。采用分段 PD控制和 PD参数整定相结合算法及控制可控硅导 T3 I I S M3 T 2 智能控制 PD算法 I P WM
采 用 MO 3 2 C 0 1和可控 硅 的功率 控制 电路 , 中 图 MO 32 C 0 1是 可控硅 输 出 的光 电耦 合 器 ,T 4 60 B A 10 B 是 双 向 可控 硅 , 热 设 备采 用 2 0V交 流供 电。在 加 2 MO 32 C 0 1内部 不 仅有 发光 二 极管 , 且 还 有 一个 小 而 功 率 双 向可控 硅 。控制 驱动 电路 如 图 3所 示 。
第 1卷 1
第 1 6期
2 1 年 6月 01
科
学
技
术
与
工
程
Vo. 1 N . 6 J n 0 1 1 1 o 1 u e2 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的PWM控制方法的精密温度控制设计惠州学院HUIZHOUUNIVERSITY毕业论文(设计)中文题目:基于单片机的PWM控制方法的精密温度控制系统设计英文题目:Design of Precise Temperature Control System Based on PWM Control Method ofMicroprocessor姓名:姚佑鹏学号: 090701224专业班级:09电气工程及其自动化2班指导教师:李卫平提交日期: 2013-05-15教务处制摘要本文设计了一种以单片机STC89C52为核心的精密温度控制系统。
它使用一线制数字温度传感器DS18B20采集温度,并通过四位数码管显示实时温度。
通过设置按键,设定恒温运行时的温度值,并显示在数码管上。
单片机采用PID控制算法对测量值和设定值进行处理,计算输出PWM波控制继电器调节发热电路的发热功率,最终控制被控对象温度。
通过原理分析,软硬件设计及实验调试,温度能够实时检测和自动控制,系统的温度控制精度可达到±0.5℃,表明该温度系统比较稳定并且精确,能够实现对温度的精密控制。
关键词:温度控制 MCS-52 DS18B20 PID PWMAbstractA precise temperature control system with the core of microprocessor STC89C52 is designed in this paper. In this system, one-wire digital thermometer DS18B20 is used to transform analog temperature signal to digital signal,through four real-time digital of a digital thermometer temperature.by setting the button,set the thermostat temperature at the time of operation, and digital display of the temperature.Single-chip Microcomputer used PID control algorithm to process the data measurement and data settings,and calculate the PWM signal, is outputted and magnified to drive a solid state relay so that the power of heat circuit is adjusted.Thus the temperature of the object can be control.Through many of theory, design and experiments, the temperature of real-time detection and automatic control test is reached,and the error of this system is ±0.2℃. It show that the system is precise and steady, and control precise temperature.Keywords: Temperature control MCS-52 DS18B20 PID PWM目录1 前言 (1)2 设计理论基础 (2)2.1 PWM控制技术 (2)2.2 数字PID算法 (2)3 系统的方案设计 (4)3.1系统设计内容及要求 (4)3.1.1设计内容 (4)3.1.2设计要求 (4)3.2方案设计的比较与论证 (4)4 系统硬件电路的设计 (6)4.1单片机最小系统模块 (7)4.1.1 单片机STC89C52的简介 (7)4.1.2 单片机系统模块的硬件设计 (10)4.2 功能实现模块 (11)4.2.1 采样模块 (11)4.2.2 按键模块 (12)4.2.3 显示模块 (13)4.4 温度控制模块 (14)5 系统软件设计 (15)5.1 主程序模块 (15)5.2 功能实现模块 (17)5.2.1 温度采样子程序 (17)5.2.2 显示子程序 (17)5.3 运算控制模块 (18)6 系统调试 (19)6.1 Keil软件的简介 (19)6.2 Proteus软件的简介 (19)6.3 软件仿真 (20)6.4 硬件调试 (21)6.5调试结果 (22)7 结论 (24)致谢 (25)参考文献 (26)附录 (27)1 前言温度是众多行业生产中的基础参数之一,也是与人们生活息息相关的一个重要物理量。
温度的测量和控制在日常生活和工业领域中具有广泛的应用,随着社会的进步、工业的发展,温度控制技术的不断革新,人们生活水平的大幅提高,对温度测量控制的精度和范围也有着更高的要求。
因此,温度控制是生产工艺流程中极为重要的一个环节,尤其在电力、航天、交通、造纸、装备制造、食品加工等行业有广泛的应用。
利用单片机来对温度进行控制,不仅能够有效地提升控制能力与生产的自动化,而且还有可能尽早实现智能化的目标。
和传统的温度控制相比,基于单片机数字PID算法和PWM控制技术的温度控制系统不仅能保持系统稳定精确,还可以降低能源消耗。
因为传统的温度控制都是通过电阻限流的方式达到的温度控制,这类控制对象惯性大,滞后现象严重,从而导致控制系统性能不佳,甚至出现控制不稳定、失控等现象,而且其整体的功率并没有根本性的改变,造成了能源的浪费。
而PID控制方式控制稳定且精度高,能满足精密温度控制系统的稳定要求。
PWM控制技术则通过占空比的改变实现对加热电路发热功率的调节,不存在限流的损失,减少了能源的消耗。
本设计又采用DS18B20数字温度传感器,该传感器具有微型化、封装简单、低能耗、高性能抗干扰能力、测量范围广、强易配处理器等优点,可使系统测量更加精确,电路更加简单。
2 设计理论基础本设计系统以单片机STC89C52为核心,采用温度传感器DS18B20获取实时温度,结合数字PID控制算法和PWM控制技术,控制调节加热电路的发热功率,最终控制被控对象的温度。
本章将逐一介绍以上所涉及到的控制算法和控制技术。
2.1 PWM控制技术PWM是英文“Pulse Width Modulation”的缩写,即脉冲宽度调制,简称脉宽调制。
它是一种模拟控制方式,其根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
PWM是开关型稳压电源中的术语。
这是按稳压的控制方式分类的,除了PWM型,还有PFM型和PWM、PFM混合型。
脉宽宽度调制式(PWM)开关型稳压电路是在控制电路输出频率不变的情况下,通过电压反馈调整其占空比,从而达到稳定输出电压的目的。
其中方波高电平时间跟周期的比例叫占空比,例如1秒高电平1秒低电平的PWM波占空比是50% 。
PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换,PWM相对于模拟控制的另一个优点是增强对噪声抵抗的能力。
2.2 数字PID算法PID算法是本系统软件程序中的核心部分。
我们采用PID模糊控制技术,通过Pvar、Ivar、Dvar(比例、积分、微分)三方面的结合调整形成一个模糊控制来解决惯性温度误差问题。
其原理如下:本系统的温度控制器的电热元件是发热片。
发热片通过电流加热时,内部温度都很高。
当容器内温度升高至设定温度时,温度控制器会发出信号停止加热。
但这时发热片的温度会高于设定温度,发热片还将会对被加热的器件进行加热,即使温度控制器发出信号停止加热,被加热器件的温度还往往继续上升几度,然后才开始下降。
当下降到设定温度的下限时,温度控制器又开始发出加热的信号,开始加热,但发热片要把温度传递到被加热器件需要一定的时间,这就要视发热热与被加热器件之间的介质情况而定。
通常开始重新加热时,温度继续下降几度。
所以,传统的定点开关控制温度会有正负误差几度的现象,但这不是温度控制器本身的问题,而是整个热系统的结构性问题,使温度控制器控温产生一种惯性温度误差。
增量式PID算法的输出量为式中,e(k)、e(k-1)、e(k-2)分别为第n次、n-1次和n-2次的偏差值,Kp、Ki、Kd分别为比例系数、积分系数和微分系数,采样周期为T。
计算机每隔固定时间 T将现场温度与用户设定目标温度的差值带入增量式PID算法公式,由公式输出量决定PWM方波的占空比,后续加热电路根据此PWM方波的占空比决定加热功率。
现场温度与目标温度的偏差大则占空比大,加热电路的加热功率大,使温度的实测值与设定值的偏差迅速减少;反之,二者的偏差小则占空比减小,加热电路加热功率减少,直至目标值与实测值相等,达到自动控制的目的。
PID参数的选择是系统设计成败的关键,它决定了温度控制的准确度。
数字PID调节器参数的整定可以仿照模拟PID调节器参数整定的各种方法,根据工艺对控制性能的要求,决定调节器的参数。
各个参数对系统性能的影响如下:1.比例系数P对系统性能的影响:比例系数加大,使系统的动作灵敏,速度加快,稳态误差减小;P偏大,振荡次数加多,调节时间加长;P太大时,系统会趋于不稳定;P太小,又会使系统的动作缓慢。
P可以选负数,这主要是由执行机构、传感器以及控制对象的特性决定的。
如果P的符号选择不当对象测量值就会离控制目标的设定值越来越远,如果出现这样的情况P的符号就一定要取反。
2.积分控制I对系统性能的影响:积分作用使系统的稳定性下降,I小(积分作用强)会使系统不稳定,但能消除稳态误差,提高系统的控制精度。
3.微分控制D对系统性能的影响:微分作用可以改善动态特性,D偏大时,超调量较大,调节时间较短;D偏小时,超调量也较大,调节时间也较长;只有D合适,才能使超调量较小,减短调节时间。
3 系统的方案设计3.1系统设计内容及要求3.1.1设计内容1.温度信号采集与处理;2.PID算法的设计;3.PWM占空比的改变;4.设计电路并进行仿真;5.制作硬件电路并完成软件、硬件的联调及测试。
3.1.2设计要求1.温度控制范围:室温0℃~+100℃;2.温度控制精度:±0.5℃;3.温度设置:由按键设置控制温度;4.显示:四位有效值显示;5.报警装置:实时温度超过设置温度时蜂鸣器提示报警。