图像的邻域处理
【数字图像处理】M邻接克服8邻接的二义性(多重性)

【数字图像处理】M邻接克服8邻接的⼆义性(多重性)
数字图像处理中有3种邻接关系:4邻接、8邻接和M邻接。
M邻接的条件:
对于V假设要p,q两点是M邻接点,则满⾜下⾯两个条件之⼀即可
1、q在p的4邻域中;
2、q在p的对⾓邻域中,并且q的4邻域与p的4邻域相交为空集(交集⽆点属于V)
下图是⼀个例⼦:
上图中,8邻域中的中间的那个1可以有两条路到达右上⾓的那个1,这就是所说的⼆义性。
这种情况在边缘检测⾥是很不希望的。
⽽改成m 邻域以后,中间的1像素和右上⾓的1像素是8连通却不是m连通,这可以从m连通的定义得到。
因此,如果⽤m连通从中间的1到右上⾓的1就只有⼀条路。
视觉系统课件(9)Neighborhood operations

中心像素
中心像素( pixel) 中心像素(center pixel)是输入图像真正要进 行处理的像素。 行处理的像素。 中心像素的定位: 中心像素的定位:
若邻域的行和列都为奇数, 若邻域的行和列都为奇数,则中心像素为邻域最中心 位置的像素 若邻域的行或列有一维为偶数,设邻域为m 若邻域的行或列有一维为偶数,设邻域为m×n的,则 中心像素为: 中心像素为: floor(([m n]+1)/2)
Example
fun=inline('uint8(round(mean2(x)*ones(size(x))))'); B2=blkproc(A,[8 8],fun); imshow(B2)
邻域重叠
1×2重叠 × 重叠
Example
imshow(B2) C=imabsdiff(B3,B2); B3=blkproc(A,[8 8],[1 2],fun); imshow(C,[]) imshow(B3)
分离邻域操作
特点: 特点:
分离邻域从左上角开始覆盖整个图像矩阵。 分离邻域从左上角开始覆盖整个图像矩阵。 对邻域超出边界的像素自动填充零值。 对邻域超出边界的像素自动填充零值。 自动填充零值 以分离邻域为单位进行处理。 以分离邻域为单位进行处理。 进行处理 每次邻域操作返回一个与分离邻域相同大小的 每次邻域操作返回一个与分离邻域相同大小的 矩阵。 矩阵。 输出图像的大小与输入图像大小可以不一致。 输出图像的大小与输入图像大小可以不一致。 大小可以不一致
特点: 特点:
当邻域操作从图像矩阵的一个位置移动到另一 个位置时,滑动邻域也朝相同的方向移动。 个位置时,滑动邻域也朝相同的方向移动。 对邻域超出边界的像素自动填充零值。 对邻域超出边界的像素自动填充零值。 自动填充零值 以像素为单位进行处理(核心:中心像素)。 以像素为单位进行处理(核心:中心像素)。 每次邻域操作返回一个标量值。 每次邻域操作返回一个标量值。 标量值 输出图像的大小与输入图像大小一致。 输出图像的大小与输入图像大小一致。 大小一致
第七章-邻域运算-图像处理
x
i
m 2
1
,
y
j
m 2
1
演示
100 101 98 97 100 79 96 106 103 95 89 67 87 121 87 94 87 72 86 133 99 103 85 75 92 99 111 102 78 74 95 102 121 111 112 73
86 102 84 100 88 98 92 90 97 91 90 88
100 101 98 97 1010 792 96 106 103 95 892 673 87 121 87 94 871 722 86 133 99 103 85 75 92 99 111 102 78 74 95 102 121 111 112 73
861 102 842 100 881 98 92 90 97 91 90 88
是消除或尽量减少噪声的影响,改善图像的质量。
假设
在假定加性噪声是随机独立分布的条件下,利用邻 域的平均或加权平均可以有效的抑制噪声干扰。
从信号分析的观点
图像平滑本质上低通滤波。将信号的低频部分通过, 而阻截高频的噪声信号。
问题
往往图像边缘也处于高频部分。
2 平滑
1)邻域平均(矩形邻域和圆形邻域)
T2, 2f x 1, y 1
1 引言
4)相关与卷积的物理含义
相关运算是将模板当权重矩阵作加权平均; 而卷积先沿纵轴翻转,再沿横轴翻转后再加
权平均。 如果模板是对称的,那么相关与卷积运算结
果完全相同。 邻域运算实际上就是卷积和相关运算,用信
号分析的观点就是滤波。
2 平滑
图像平滑的目的
12 4 6 4 2 21 2 3 2 1
图像处理 第七章 邻域运算
第七章 邻域运算目录1. 引言相关与卷积2. 平滑3. 中值滤波4. 边缘检测5.细化作业1.引言邻域运算是指当输出图象中每个象素是由对应的输入象素及其一个邻域内的象素共同决定时的图象运算,通常邻域是远比图象尺寸小的一规则形状,如正方形2x2、3x3、4x4或用来近似表示圆及椭圆等形状的多边形。
信号与系统分析中的基本运算相关与卷积,在实际的图象处理中都表现为邻域运算。
邻域运算与点运算一起形成了最基本、最重要的图象处理工具。
以围绕模板(filter mask, template )的相关与卷积运算为例,给定图象f(x,y)大小N×N,模板T(i, j)大小m ×m (m 为奇数),常用的相关运算定义为: 使模板中心T((m-1)/2,(m-1)/2)与f(x,y)对应,∑∑-=-=--+--+=•=101)21,21(),(),(),(m i m j m j y m i x f j i T y x f T y x g当m=3时,)1,1())2,2(),1()1,2(),1()0,2()1,()2,1(),()1,1()1,()0,1()1,1()2,0(),1()1,0()1,1()0,0(),(++++++++++-++-+-+--=y x f T y x f T y x f T y x f T y x f T y x f T y x f T y x f T y x f T y x g卷积运算定义为:∑∑-=-=-+--+-=•=101)21,21(),(),(),(m i m j m j y m i x f j i T y x f T y x g 当m=3时,)1,1())2,2(),1()1,2()1,1()0,2()1,()2,1(),()1,1()1,()0,1()1,1()2,0(),1()1,0()1,1()0,0(),(--+-++-+-++++-++++++=y x f T y x f T y x f T y x f T y x f T y x f T y x f T y x f T y x f T y x g可见,相关运算是将模板当权重矩阵作加权平均,而卷积与相关不同的只是在于需要将模板沿中心反叠(先沿纵轴翻转,再沿横轴翻转;即沿次对角线翻转)后再加权平均。
图像处理中的图像去噪算法使用方法
图像处理中的图像去噪算法使用方法图像去噪算法是图像处理领域的一个重要研究方向,它的主要目标是通过消除或减少图像中的噪声,提高图像的视觉质量和信息可读性。
图像噪声是由于图像信号的获取、传输和存储过程中引入的不可避免的干扰所致,例如传感器噪声、电磁干扰等,使图像中的细节模糊,影响图像的清晰度和准确性。
因此,图像去噪算法在许多应用领域中都具有重要的意义,如医学图像处理、计算机视觉、图像识别等。
现在,我们将介绍几种常见的图像去噪算法及其使用方法。
1. 中值滤波算法:中值滤波算法是一种简单而有效的图像去噪方法。
它的基本原理是对图像中的每个像素点周围的邻域进行排序,然后取中间值作为该像素点的输出值。
中值滤波算法适用于去除椒盐噪声和脉冲噪声,它能够保持图像的边缘和细节信息。
使用中值滤波算法时,需要设置一个邻域大小,根据该大小确定图像中每个像素点周围的邻域大小。
较小的邻域大小可以去除小型噪声,但可能会丢失一些细节信息,较大的邻域大小可以减少噪声,但可能会使图像模糊。
2. 均值滤波算法:均值滤波算法是一种基本的线性滤波技术,它的原理是计算图像中每个像素点周围邻域像素的平均值,并将平均值作为该像素点的输出值。
均值滤波算法简单易实现,适用于消除高斯噪声和一般的白噪声。
使用均值滤波算法时,同样需要设置邻域大小。
相较于中值滤波算法,均值滤波算法会对图像进行平滑处理,减弱图像的高频细节。
3. 降噪自编码器算法:降噪自编码器算法是一种基于深度学习的图像去噪算法。
它通过使用自编码器网络来学习图像的特征表示,并借助重建误差来去除图像中的噪声。
降噪自编码器算法具有较强的非线性建模能力,可以处理复杂的图像噪声。
使用降噪自编码器算法时,首先需要训练一个自编码器网络,然后将噪声图像输入网络,通过网络进行反向传播,优化网络参数,最终得到去噪后的图像。
4. 小波变换去噪算法:小波变换去噪算法是一种基于小波分析的图像去噪算法。
它将图像分解为不同尺度下的频域子带,通过对各个子带进行阈值处理来消除图像中的噪声。
matlab 邻域平均法

matlab邻域平均法邻域平均法是图像处理中一种常用的平滑滤波方法,用于减小图像中噪声的影响。
在MATLAB中,你可以通过邻域平均法实现图像的平滑处理。
以下是一个简单的步骤:1.读取图像:```matlab%读取图像img=imread('your_image.jpg');```2.设定滤波器的大小:选择邻域平均法的滤波器大小,通常为一个正方形的区域,例如3x3、5x5等。
3.应用邻域平均法:```matlab%设置滤波器大小filter_size=3;%例如,3x3的滤波器%应用邻域平均法smoothed_img=imfilter(img,fspecial('average',[filter_size filter_size]));```上述代码中,`fspecial('average',[filter_size filter_size])`用于创建一个平均滤波器。
`imfilter`函数将滤波器应用于原始图像,得到平滑后的图像。
4.显示原始图像和平滑后的图像:```matlab%显示原始图像subplot(1,2,1);imshow(img);title('原始图像');%显示平滑后的图像subplot(1,2,2);imshow(smoothed_img);title('邻域平均法平滑后的图像');```这段代码将原始图像和经过邻域平均法平滑处理后的图像进行了对比显示。
5.调整参数:根据实际情况,你可能需要调整滤波器的大小以及其他参数,以获得最佳的平滑效果。
请注意,邻域平均法是一种简单的平滑方法,适用于一些简单的降噪需求。
在实际应用中,还有其他更复杂的滤波器和方法,可以根据具体情况选择。
数字图像处理题库

试题库的收集:直接打开百度文库,这样比较全面一些输入:数字图像处理试题习题名词解释:选择题1、数字图像的_____D___。
A空间坐标离散,灰度连续B灰度离散,空间坐标连续C两者都是连续的D两者都是离散的2、图像灰度量化用6比特编码时,量化等级为_____B___。
A 32个B 64个C128个 D 256个3. 下面说法正确的是:( B )A、基于像素的图像增强方法是一种线性灰度变换;B、基于像素的图像增强方法是基于空间域的图像增强方法的一种;C、基于频域的图像增强方法由于常用到傅里叶变换和傅里叶反变换,所以总比基于图像域的方法计算复杂较高;D、基于频域的图像增强方法比基于空域的图像增强方法的增强效果好。
1、采用幂次变换进行灰度变换时,当幂次取大于1时,该变换是针对如下哪一类图像进行增强。
(B)A 图像整体偏暗B 图像整体偏亮C图像细节淹没在暗背景中D图像同时存在过亮和过暗背景2、图像灰度方差说明了图像哪一个属性。
( B )A 平均灰度B 图像对比度C 图像整体亮度D图像细节3、计算机显示器主要采用哪一种彩色模型( A )A、RGBB、CMY或CMYKC、HSID、HSV4、采用模板[-1 1]T主要检测( A )方向的边缘。
A.水平B.45︒C.垂直D.135︒5、下列算法中属于图象锐化处理的是:( C )A.低通滤波B.加权平均法C.高通滤波D. 中值滤波6、维纳滤波器通常用于( C )A、去噪B、减小图像动态范围C、复原图像D、平滑图像7、彩色图像增强时, C 处理可以采用RGB彩色模型。
A. 直方图均衡化B. 同态滤波C. 加权均值滤波D. 中值滤波8、__B__滤波器在对图像复原过程中需要计算噪声功率谱和图像功率谱。
A. 逆滤波B. 维纳滤波C. 约束最小二乘滤波D. 同态滤波9、高通滤波后的图像通常较暗,为改善这种情况,将高通滤波器的转移函数加上一常数量以便引入一些低频分量。
这样的滤波器叫B 。
数字图像处理实验三(邻域平均法和中值滤波)
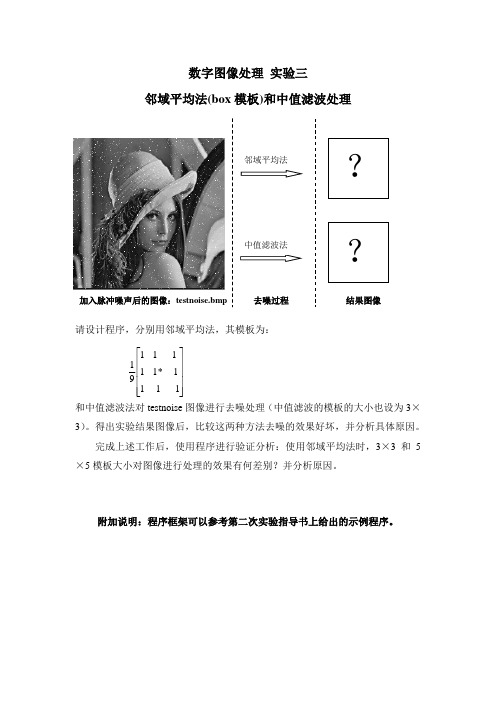
数字图像处理 实验三
邻域平均法(box 模板)和中值滤波处理
加入脉冲噪声后的图像:testnoise.bmp 去噪过程 结果图像
请设计程序,分别用邻域平均法,其模板为:
和中值滤波法对testnoise 图像进行去噪处理(中值滤波的模板的大小也设为3×3)。
得出实验结果图像后,比较这两种方法去噪的效果好坏,并分析具体原因。
完成上述工作后,使用程序进行验证分析:使用邻域平均法时,3×3和5×5模板大小对图像进行处理的效果有何差别?并分析原因。
附加说明:程序框架可以参考第二次实验指导书上给出的示例程序。
邻域平均法 中值滤波法
⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡1111*1111191。
12形态学图像处理介绍
腐蚀运算的示例
图(a)中的阴影部分为集合X,图(b)中的中的阴 影部分为结构元素S,而图(c)中黑色部分给出 了腐蚀结果。
由图可见,腐蚀将图如果B上 的所有点都包含在X的范围内,则该点保留, 否则删除。
matlab中与腐蚀相关的两个函数为 (1) imerode I2=imerode(I, SE) I为原始图像,对应为二值图像 SE为由strel函数返回的自定义或预设的结构元 素对象 (2) strel strel函数为形态学运算生成结构元素SE,当生 成供二值形态使用的结构元素时,调用形式为: SE= strel(shape, parameters)
第二种情形说明S+x与X不相关,
而第三种情形说明S+x与X只是部分相关
2. 二值图像中形态学运算
1、腐蚀及其实现
对于集合A和S,使用S对A进行腐蚀,记为A S, 定义为:
AS {z | (S ) z A}
如果当S的原点移到z点时S能够完全包含于A中, 则所有这样的z点构成的集合即为S对A的腐蚀 图像。 腐蚀运算的结果不仅与结构元素的形状(矩形、 圆形、菱形等)选取有关,而且还与原点位置的 选取有关。
形态学图像处理
形态学即数学形态学(Mathematical Morphology)主要用于从图像中提取对表达和描 绘区域形状有意义的图像分量。 基本思想:用具有一定形态的结构元素去度量 和提取图像中的对应形状以达到对图像分析和 识别的目的 形态学图像处理的数学基础和所用语言是集合 论
形态学图像处理表现为一种邻域运算形式;
一种特殊定义的邻域称之为“结构元素” (Structure Element),在每个像素位置上它与 二值图像对应的区域进行特定的逻辑运算,逻 辑运算的结果为输出图像的相应像素。 形态学运算的效果取决于结构元素的大小、内 容以及逻辑运算的性质。
图像处理锐化平滑.ppt
其它变换
类似傅立叶变换的其它离散线性变换, 如离散余弦变换、离散正弦变换、方波 型变换等等。
图像的线性操作及卷积
线性操作:主要是指图像处理操作中,
输出图像的像素值是输出图像的多像素 的线性组合。 可将线性操作看作是: 输入线性系统输出 的一个操作过程。 下面分析线性系统应具有的特性。
再将积函数作二维积分,得到卷积结果。
离散二维卷积:
对于一幅数字图像F和一个二维卷积模板 G,它们的二维卷积为:
H F *G
H (i, j) F(m, n)G(i m, j n)
mn
由于F和G仅在有限范围内非零,因此求 和计算只需在非零部分重叠的区域上进 行。
值为0,方差为
n 2
。
则原图像f(m,n)被噪声污染后为:
g(m, n) f (m, n) (m, n)
对上述图像求邻域平均得:
g(m, n) 1 g(i, j)
M i, jS
其中S为一个包含g(m,n)有M个像素的邻 域。
则
g(m, n) 1 f (i, j) 1 (i, j)
线性系统也称线性移不变系统,具有以 下性质:
1. 线性:
定义 T[] 为一个系统,即一种运算。
设输入信号 x(t) 经系统 T[] 输出信号 y(t)
即 y(t) T[x(n)]
令 y1(t) T[x1(t)] y2 (t) T[x2 (t)]
若 ay1(t) by2 (t) T[ax1(t) bx2 (t)]
二维卷积
二维卷积的表达式为:
h(x, y) f * g
图像邻域与块运算
摘要MATLAB7.0的工作环境包括当前工作窗口、命令历史记录窗口、命令控制窗口、图形处理窗口、当前路径选择菜单、程序编辑器、变量查看器、模型编辑器、GUI编辑器以及丰富的函数库和MATLAB附带的大量M文件。
在MATLAB图像处理中,有时并不需要对整个图像进行操作,而是对图像中的某一部分进行操作,即块操作。
比如许多线性滤波操作和二进制图像均按照块操作方式实现。
MATLAB的图像处理工具箱提供了多个专门用于图像块操作的函数,如dilate函数等。
此外,工具箱提供的大量通用函数也适用于块操作。
利用这些函数,用户可以进行各种块操作,包括滑动邻域操作和块处理操作。
关键词: MATLAB图像处理滑动邻域操作块处理操作目录1课程设计目的 (1)2课程设计要求 (2)3 MATLAB 及其图像处理工具箱 (3)3.1 MATLAB的广泛应用 (4)3.2 MATLAB软件系统构成 (5)3.3 MATLAB语言 (5)3.4 MATLAB中的傅里叶变换函数[2] (6)3.5 MATLAB GUI设计工具简介 (7)3.6 GUI开发环境 (9)3.7 GUIDE菜单编辑工具 (9)4 图像邻域与块处理 (10)4.1 块处理操作 (10)4.2 滑动邻域操作 (11)4.3 分离块操作 (13)4.4 滑动邻域操作程序 (15)4.5 分离块处理操作程序 (16)5 总结和体会 (19)参考文献 (20)1课程设计目的1)掌握matlab的基本操作和函数的实用2)掌握二值图像滑动邻域操作、分离块操作的基本方法3)编程实现滑动邻域操作、分离块操作2课程设计要求1) 使用nlfilter函数进行图像滑动邻域操作,并观察操作后图像的变化。
2) 使用blkproc函数进行图像分离块操作,观察操作后的图像变化情况。
3) 在程序开发时,必须清楚主要实现函数目的和作用,需要在程序书写时做适当注释说明,理解每一句函数的具体意义和使用范围。
图像处理课程设计感想
图像处理课程设计感想一、教学目标本课程的教学目标是使学生掌握图像处理的基本原理、方法和技巧,培养学生对图像处理技术的兴趣和创新能力,提高学生在实际应用中解决问题的能力。
具体分为以下三个部分:1.知识目标:学生需要掌握图像处理的基本概念、常用算法和图像处理软件的使用方法。
2.技能目标:学生能够运用图像处理技术解决实际问题,如图像滤波、边缘检测、图像增强、图像分割等。
3.情感态度价值观目标:学生通过课程学习,培养对图像处理技术的热爱和探索精神,提高审美观念,增强创新意识。
二、教学内容本课程的教学内容主要包括图像处理的基本原理、常用算法和图像处理软件的使用。
具体安排如下:1.图像处理的基本概念:图像的表示、图像的文件格式、图像的数字化等。
2.图像处理的基本运算:图像的点运算、图像的邻域运算、图像的图像运算等。
3.图像处理的高级算法:边缘检测、图像滤波、图像增强、图像分割等。
4.图像处理软件的使用:Photoshop、ImageJ、MATLAB等图像处理软件的基本使用方法。
三、教学方法为了提高学生的学习兴趣和主动性,本课程将采用多种教学方法,如讲授法、讨论法、案例分析法、实验法等。
1.讲授法:通过讲解图像处理的基本原理和算法,使学生掌握图像处理的基本知识。
2.讨论法:引导学生针对实际问题进行讨论,培养学生的创新能力和解决问题的能力。
3.案例分析法:分析典型的图像处理案例,使学生了解图像处理技术在实际应用中的重要性。
4.实验法:通过实验操作,使学生掌握图像处理软件的使用方法,提高学生的实际操作能力。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,我们将选择和准备以下教学资源:1.教材:选用权威、实用的图像处理教材,如《数字图像处理》、《图像处理与分析》等。
2.参考书:提供相关的图像处理参考书,如《数字图像处理教程》、《图像处理技术》等。
3.多媒体资料:制作课件、教学视频等多媒体资料,以便学生课后复习和自学。
光电图像处理 第二章 图像处理基础知识
第二章§2.1 数字图像的表示关键词图像坐标系§2.2 数字图像的空间分辨率及灰度级分辨率空间分辨率分别用1024x1024、512x512、256x256、128x128、64x64、32x32的网格对原图进行数字化的结果空间分辨率采样数目由1024×1024 逐次减至32×32 像素原图256级128级64级32级16级8级4级2级§2.3 像素间的基本关系(2)邻接性与连通性3 2 14 3 2 10 1 3 2 2 3 43 3 2 1 0 1 1(3)像素间的距离是一个度量函数,并满足:]三种距离的定义本节小结作§2.4 数字图像文件格式矢量图与位图的比较数字图像文件格式常用的图像文件格式BMP文件格式BMP文件格式详解文件信息头数据结构文件信息头数据结构调色板的数据结构BMP图像文件使用中的注意事项2、GIF格式GIF图像文件演示3、TIFF格式4、JPEG格式图像格式小结作§2.5 Matlab图像处理简介3、4Matlab5、Matlab 软件启动后的画面指令窗口(Command Window)指令历史记录窗口(Command History)工作空间窗口(Workspace )指令窗口(Command Window)工作空间窗口(Workspace)指令历史记录窗口(Command History)Matlab二、Matlab。
计算机图像处理空间域图像平滑
g(x,y)1 f(i,j)
M i,j s
(4.21)
• 式中x,y=0,1,…,N-1; • s为(x,y)邻域内像素坐标的集合; • M表示集合s内像素的总数。
• 可见邻域平均法就是将当前像素邻域内各像素的灰度平 均值作为其输出值的去噪方法。
例如,对图像采用3×3的邻域平均法,对于像素 (m,n),其邻域像素如下:
5、用窗口像素分别与相应位置上的权重因子相乘, 积之和即为平滑输出;
6、依次确定下一个待处理像素,重复2-5。 注意:图像中的四边缘不作处理。
权重矩阵的计算
w(j1,k1) w(j1,k) w(j1,k1)
W w(j,k1)
w(j,k)
w(j,k1)
w(j1,k1) w(j1,k) w(j1,k1)
m1n1m1nm1n1mn1mn1m1n1m1nm1n1邻域如线状方形十字形圆形菱形等见图噪声消除法举例添加椒盐噪声椒盐噪声白图像上的黑点和黑图像上的白点使用噪声消除法去除噪声需要确定窗口形状确定门槛值t实例a原图像b对a加椒盐噪声的图像55噪声消除法t48邻域平均法邻域平均法是一种直接在空间域上进行平滑处理的技术
噪声消除法举例
给定一幅图像 添加椒盐噪声
椒盐噪声--白图像上的黑点和黑图像上的白点
使用噪声消除法去除噪声
需要确定窗口形状 确定门槛值T
实例
(a)原图像 (b)对(a)加椒盐噪声的图像
(c) 3×3噪声消除法(T=64) (d) 5×5噪声消除法(T=48)
邻域平均法
邻域平均法是一种直接在空间域上进行平 滑处理的技术。
当m 3时
fx,y T0,0f x1,y 1 T0,1f x 1,y T0,2f x1,y 1 T1,0f x,y 1 T1,1f x,y T1,2f x,y 1 T2,0f x1,y 1 T2,1f x 1,y T2,2f x1,y 1
超分辨邻域嵌入法

超分辨邻域嵌入法超分辨邻域嵌入法是一种利用局部邻域信息来提高图像分辨率的图像处理方法。
它通过将低分辨率图像嵌入到高分辨率图像中,通过学习邻域信息来进行插值,从而得到高分辨率图像。
本文将介绍超分辨邻域嵌入法的原理、实现方法以及应用场景。
一、原理超分辨邻域嵌入法的主要原理是通过学习邻域信息来进行插值。
具体而言,给定一个低分辨率图像I_l,我们需要生成一个高分辨率图像I_h。
I_l和I_h之间的关系可以表示为I_h=f(I_l,S),其中f为一个映射函数,S为邻域信息。
邻域信息指的是I_l中每个像素周围相邻的像素。
超分辨邻域嵌入法的核心是学习这个映射函数f。
通常采用深度学习的方法,使用已有的高分辨率图像与低分辨率图像的对应关系进行训练。
通过训练,我们可以得到一个映射函数f,从而得到高分辨率图像I_h。
二、实现方法超分辨邻域嵌入法的实现方法包括以下几个步骤:1.数据准备首先,需要准备高分辨率图像和低分辨率图像的数据集。
可以从图像库中获取高分辨率图像,然后使用插值算法生成对应的低分辨率图像。
2.网络结构设计接下来,需要设计网络结构,通常采用深度卷积神经网络来实现。
这个网络可以是一维、二维或三维的,具体的选择可以根据需求来进行。
3.训练深度神经网络使用已有的高分辨率图像与低分辨率图像的对应关系进行训练。
训练过程通常采用梯度下降法来实现。
4.测试训练完成后,需要测试模型的性能。
可以用新的低分辨率图像来测试模型的性能,同时也可以使用已有的高分辨率图像进行比较。
三、应用场景超分辨邻域嵌入法在图像处理和计算机视觉中有着广泛的应用。
它可以应用在高清视频的解码和压缩中,也可以应用在医学图像处理和地震图像处理中。
此外,超分辨邻域嵌入法也可以用来提高图像识别和人脸识别的准确率。
总之,超分辨邻域嵌入法是一种基于深度学习的图像处理方法,通过学习邻域信息来提高图像分辨率,具有广泛的应用前景。
超分辨邻域嵌入法在实际应用中具有很高的价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五点平均卷积模板矩阵Operator
0
1 1
九点平均卷积模板矩阵Operator
1
1 1
1
1 1
0
1 0
1
1 1
1
1 1
Embossment算子卷积模板矩阵Operator
2 0 0 0 0 0 0 0 2
10
void CImageView::OnSmoothByAverage5() 五点平均卷积模板矩阵Operator { 0 1 0 …//清除屏幕 …//显示工作画布中的原始图象 1 1 1 //设置五点平均算子 1 1 0 SetOperatorOfAverage5(Operator); //卷积图像 AddImageOneEdge(&Image1,&WorkCanvus);//图像加边 Convolution(&Image2,&Image1,Operator,5,0,3,3);//图像与算子卷积 SubtractImageOneEdge(&SaveCanvus,&Image2);//图像去边 …//画五点平均平滑后图象 } void SetOperatorOfAverage5(char Operator[5][5]) { Operator[0][0]=0; Operator[0][1]=1; Operator[0][2]=0; Operator[1][0]=1; Operator[1][1]=1; Operator[1][2]=1; Operator[2][0]=0; Operator[2][1]=1; Operator[2][2]=0; } 11
五点平均
12
7.2.3 中值滤波
中值是指将奇数个窗口中的数据按大小顺序排序后处于中间 位置的那个数 中值滤波是指将窗口里的中值作为新图象的像素
窗口
1 1 1 1 1 1 1 1 1 3 4 5
输入图像
5 7 2 2 2 3 2 1 1 2 1 3 2 1 5 3 2 5
窗口中奇数个数据 窗口中奇数个数据 2 7 4 2 7 1 2 2 5 3 2 1 3
图像去边 在图像上下方向各去除一行,在左右方向各去除一列 Program 第七章图象邻域处理.cpp- SubtractImageOneEdge ()
3
7.1.2 图像卷积运算
卷积后图像中(x,y)处的像素g(x,y)是原图像(x,y)处的像素f(x,y) 的一个邻域Ω中像素值根据某种卷积算子模板的线性组合
梯度法(水平垂直梯度)
▽g(x,y)=| Gx | + | Gy | Gx与Gy分别为水平梯度与垂直梯度 水平方向与垂直方向的梯度之和
0 0 1
1
2
-1 1
2
1
nNewPixel=abs(nNeighbor[1][2]-nNeighbor[1][1]) nNeighbor +abs(nNeighbor[2][1]-nNeighbor[1][1]); 演示程序:邻域处理/一阶边缘检测:梯度法 Program 第七章图象邻域处理.cpp-OnEdgeDetectByGradientMethod()
第7章 图像的邻域处理
1
7.1 邻点与邻域处理
4邻点
当前像素的上、下、左、右4点称为它的4邻点
8邻点
4邻点再加上当前像素对角线方向上的4个邻点总共8个点称为8邻点
输出的像素值由包含当前像素的一个邻域中的几个像素的像素值决定 一般采用奇数行和奇数列的矩形来构成邻域,如3×3与5×5邻域
4邻点 * * 8邻点 * *
0 1 0
卷积模板矩阵Operator
1 1 1 0 1 0 *0 *1 *0 *1 *1 *1 *0 *1 *0
扩展行列后的输入图像f
扩展行列后的输出图像g
输入图像
3
4 5
3 *0 3 *1 5 *0 2 2
1 1
*1 *1 3 *0 3 *1 5 *0 2
2 2
1 1 1
2 2
1 1 1
5
7 2
void Convolution(CImage *pNewImage,CImage *pOldImage,char Operator[5][5],int nScale,int nOffset,int nOperatorWidth,int nOperatorHeight) { … CopyImage(pNewImage,pOldImage); nWidth=pOldImage->GetWidth(); nHeight=pOldImage->GetHeight(); for (y=nOperatorHeight/2;y<nHeight-nOperatorHeight/2;y++) for (x=nOperatorWidth/2;x<nWidth-nOperatorWidth/2;x++) { nNewPixel=0; for(i=0;i<nOperatorHeight;i++) for(j=0;j<nOperatorWidth;j++) nNewPixel+=(int)Operator[i][j]* (BYTE)GetPixelValue(pOldImage,(x-nOperatorWidth/2)+j,(y-nOperatorHeight/2)+i); nNewPixel=nNewPixel/nScale+nOffset; if (nNewPixel>0xff) nNewPixel=0xff; else if (nNewPixel<0) nNewPixel=0; SetPixelValueInIndexImage(pNewImage,x,y,(BYTE)nNewPixel); } 7 }
3×3邻域中的十字邻域 方形邻域 3点邻域,3点邻域可消除视频图像中常见的水平条纹干扰
模板内各因子之和除以相应的衰减因子的结果为1
3 3 5 2 2 *0 2 *1 3 *0 3 2 2 1 1 1 2 2 1 1 1 9
十字邻域 0 1 0 1 1 1 0 1 0 1 1 1
方形邻域 1 1 1 1 1 1 0 0 0
2
2 3
18 22 13 23 20 15
21 19 11
9
4 *0 4 *1 7 *0 2 *1 *1 *1
*1 *1 5 *1 2 *0 3
5
图像处理中卷积的特点
3 3 4 5 5
3 *0 5 3 *1 5 4 *0 7 5 5 2 2
*1 *1 *1
排序后的窗口中奇数个数据
2 3 2 3 2 4 2 5 3 5 7
2
13
中值滤波特点
对于一些细节多,特别是点、线、尖顶细节多的图像不宜采 用中值滤波 常用的几种采样窗口 演示程序:邻域处理/图像平滑:五点中值滤波
Program 第七章图象邻域处理.cpp-OnFilterByMiddle5() Program 第七章图象邻域处理.cpp-OnFilterByMiddle9()
g ( x, y )
( m,n )
Operator( x m, y n) f (m, n)
原图像f 卷积后图像g
五点平均算子卷积模板Operator
0 1 0 1 1 1 0 1 0
f(x,y)
g(x,y)
4
图像卷积计算过程
设nScale衰减因子=1 nOffset为偏移值=0
3点邻域 1 1 1 0 0 0
3 4 5 5
3 *0 5 *1 4 *1 7 *1 5 *0 2 *1 5 2
图像平滑-平滑模板法
演示程序:邻域处理/图像平滑:五点平均
Program 第七章图象邻域处理.cpp-OnSmoothByAverage5() (作业)开发“邻域处理/图像平滑:九点平均”程序 (作业)开发“邻域处理/Embossment算子”程序
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
(留作作业)邻域处理/图像平滑:九点中值滤波
图 7-5 中值滤波的几种常用窗口
14
void MedianFilteringOf5Points(CImage *pNewImage,CImage *pOldImage) { int y,x,nWidth,nHeight; BYTE Neighbor[20],cNewPixel; nWidth=pOldImage->GetWidth(); nHeight=pOldImage->GetHeight(); if (!pNewImage->IsNull()) pNewImage->Destroy(); //如果画布pNewImage非空,则清除原有图像(原位图) pNewImage->Create(nWidth,nHeight,pOldImage->GetBPP()); CopyColorTables(pNewImage,pOldImage);//复制调色板 for (y=1;y<nHeight-1;y++) for (x=1;x<nWidth-1;x++) { //取本点和4邻点数据 Neighbor[0]=(BYTE)GetPixelValue(pOldImage,x,y-1); Neighbor[1]=(BYTE)GetPixelValue(pOldImage,x,y); Neighbor[2]=(BYTE)GetPixelValue(pOldImage,x,y+1); Neighbor[3]=(BYTE)GetPixelValue(pOldImage,x-1,y); Neighbor[4]=(BYTE)GetPixelValue(pOldImage,x+1,y); //排序取中值,BubbleSort cNewPixel=SortAndGetMiddle(Neighbor,5,2); SetPixelValueInIndexImage(pNewImage,x,y,cNewPixel); } } 15