智能寻迹避障小车完整电路原理图
寻迹避障小车原理

循迹避障小车原理一)小车功能实现利用光电传感红外对射管;红外发射与接收二极管组成检测黑白线;实现小车能跟着白线或黑线行走;同时也可避开障碍物;即小车寻迹过程中;若遇障碍物可自行绕开;绕开后继续寻迹..二)电路分析1.光电传感循迹光电传感器原理;利用黑白线对红外线不同的反射能力..然后通过光敏二极管或光敏三极管;接收反射回的不同光强信号;把不同光强转换为电流信号;最后通过电阻;转换为单片机可识别的高低电平..光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端;为高电平时;发光二极管不工作;传感器休眠;为低电平时;传感器启动..Signal端为检测信号输出;当遇到黑线;黑线吸收大量的红外线;反射的红外线很弱;光敏三极管不导通;signal输出高电平;当遇到白线;与黑线相反;反射的红外线很强;使光敏三极管导通;signal输出低电平..寻迹部分调整左右传感器之间的距离;两探头距离约等于白线宽度最合适;一般白线宽度选择范围为3 – 5 厘米比较合适..注意:该传感器的灵敏度是可调的;偶尔传感器遇到白线却不能送出相应的信号;通过调节传感器上的可调电阻;适当的增大或减小灵敏度..另外;循迹传感器的安放也算是比较有讲究的;有两种方法;一种是两个都是放置在白线内侧但紧贴白线边缘;第二种是都放置在白线的外侧;同样紧贴白线边缘..我们通常采用第二种方法..编写程序使小车遇白线时;小车跟着白线走..当小车先前前进时;如果向左偏离了白线..那么右边传感器会产生一个低电平;单片机判断这个信号;然后向右拐..回到白线后..两传感器输出信号为高电平..小车前进..如果小车向右偏离白线;左边传感器产生一个低电平;单片机判断这个信号;然后向左拐..如此如此;小车必不偏离白线..若小车的两对光电传感器同时输出的信号为高电平黑底或低电平白底;即单片机判断的都为高电平或低电平;小车向前直走;在此过程中直走小车若遇白线;小车又重复上面动作跟着白线走..避障部分当小车在寻迹沿着白线走或直走过程中遇障碍物;小车亦可自行转弯;转弯动作完成后;又继续寻迹..2.电机驱动电路电机驱动芯片采用L298N;是一款承受高压大电流的全桥型直流/步进电压驱动器;如下图电机控制芯片L298N的引脚排列引脚编号名称功能1 电流传感器A 在该引脚和地之间接小阻值电阻可用来检测电流2 输出引脚1 内置驱动器A的输出端1;接至电机A3 输出引脚2 内置驱动器A的输出端2;接至电机A4 电机电源端电机供电输入端;电压可达46V5 输入引脚1 内置驱动器A的逻辑控制输入端16 使能端A 内置驱动器A的使能端7 输入引脚2 内置驱动器A的逻辑控制输入端28 逻辑地逻辑地9 逻辑电源端逻辑控制电路的电源输入端为5V10 输入引脚3 内置驱动器B的逻辑控制输入端111 使能端B 内置驱动器B的使能端12 输入引脚4 内置驱动器B的逻辑控制输入端213 输出引脚3 内置驱动器B的输出端1;接至电机B14 输出引脚4 内置驱动器B的输出端2;接至电机B15 电流传感器B 在该引脚和地之间接小阻值电阻可用来检测电流L298N内部原理图电机驱动A/B的控制逻辑如下表所示输入信号电机运动方式使能端A/B 输入引脚1/3 输入引脚2/41 1 0 前进1 0 1 后退1 1 1 紧急停车1 0 0 紧急停车0 X X 自由转动电机驱动A/B的工作原理电机控制逻辑如下:以电机A为例;当使能端A为高电平是;如果输入端M1 Direction引脚为高电平;三极管导通;输入引脚1为低电平而输入引脚2为高电平;电机A反转;如果输入端M1 Direction引脚为底电平;三极管截止;输入引脚1为高电平而输入引脚2为低电平;电机A正转..电机驱动原理图3.中文液晶显示器128x64带中文字库的128X64是一种具有4位/8位并行、2线或3线串行多种接口方式;内部含有国标一级、二级简体中文字库的点阵图形液晶显示模块..其显示分辨率为128×64; 内置8192个16*16点汉字;和128个16*8点ASCII字符集..利用该模块灵活的接口方式和简单、方便的操作指令;可构成全中文人机交互图形界面..可以显示8×4行16×16点阵的汉字;也可完成图形显示..具有低电压低功耗特点..由该模块构成的液晶显示方案与同类型的图形点阵液晶显示模块相比;不论硬件电路结构或显示程序都要简洁得多;且该模块的价格也略低于相同点阵的图形液晶模块..基本特性: 低电源电压VDD:+3.0--+5.5V显示分辨率:128×64点内置汉字字库;提供8192个16×16点阵汉字简繁体可选内置 128个16×8点阵字符2MHZ时钟频率显示方式:STN、半透、正显驱动方式:1/32DUTY;1/5BIAS视角方向:6点背光方式:侧部高亮白色LED;功耗仅为普通LED的1/5—1/10通讯方式:串行、并口可选内置DC-DC转换电路;无需外加负压无需片选信号;简化软件设计工作温度: 0℃ - +55℃ ;存储温度: -20℃ - +60℃ 模块接口说明:PIN15 LED+ 背光正极;接4.8V-5VPIN116LED- 背光负极;接0V*注:1:如在实际应用中仅使用并口通讯模式;可将PSB接固定高电平;也可以将模块上的J8和“VCC”用焊锡短接;2:模块内部接有上电复位电路;因此在不需要经常复位的场合可将该端悬空;3:如背光和模块共用一个电源;可以将模块上的JA、JK用焊锡短接..引脚控制信号应用D/I;R/W的配合选择决定控制界面的4种模式:D/I R/W 功能说明L L MPU写指令到指令暂存器IRL H 读出忙标志BF及地址记数器AC的状态H L MPU写入数据到数据暂存器DRH H MPU从数据暂存器DR中读出数据E信号操作:E状态执行动作结果内部寄存器信号● 忙标志:BFBF标志提供内部工作情况;BF=1表示模块在进行内部操作;此时模块不接受外部指令和数据..BF=0时;模块为准备状态;随时可接受外部指令和数据..利用STATUS RD 指令;可以将BF读到DB7总线;从而检验模块之工作状态..●字型产生ROMCGROM字型产生ROMCGROM提供8192个此触发器是用于模块屏幕显示开和关的控制..DFF=1为开显示DISPLAY ON;DDRAM的内容就显示在屏幕上;DFF=0为关显示DISPLAY OFF..DFF 的状态是指令DISPLAY ON/OFF和D/IT信号控制的..●显示数据RAMDDRAM模块内部显示数据RAM提供64×2个位元组的空间;最多可控制4行16字64个字的中文字型显示;当写入显示数据RAM时;可分别显示CGROM与CGRAM的字型;此模块可显示三种字型;分别是半角英数字型16*8、CGRAM字型及CGROM的中文字型;三种字型的选择;由在DDRAM中写入的编码选择;在此阶段0000H—0006H的编码中其代码分别是0000、0002、0004、0006共4个将选择CGRAM的自定义字型;02H—7FH的编码中将选择半角英数字的字型;至于A1以上的编码将自动的结合下一个位元组;组成两个位元组的编码形成中文字型的编码BIG5A140—D75F;GBA1A0-F7FFH..●字型产生RAMCGRAM字型产生RAM提供图象定义造字功能;可以提供四组16×16点的自定义图象空间;使用者可以将内部字型没有提供的图象字型自行定义到CGRAM中;便可和CGROM中的定义一样地通过DDRAM显示在屏幕中..● 地址计数器AC地址计数器AC地址计数器是用来贮存DDRAM/CGRAM之一的地址;它可由设定指令暂存器来改变;之后只要读取或是写入DDRAM/CGRAM的值时;地址计数器的值就会自动加一;当D/I 为“0”时而R/W为“1”时;地址计数器的值会被读取到DB6——DB0中..●光标/闪烁控制电路此模块提供硬体光标及闪烁控制电路;由地址计数器的值来指定DDRAM中的光标或闪烁位置..指令操作模块控制芯片提供两套控制命令;基本指令和扩充指令如下:指令表1:RE=0:基本指令指令表2:RE=1:扩充指令注:当IC1在接受指令前;微处理器必须先确认其内部处于非忙碌状态;即读取BF标志时;BF需为零;方可接受新的指令;如果在送出一个指令前并不检查BF标志;那么在前一个指令和这个指令中间必须延长一段较长的时间;即是等待前一个指令确实执行完成..三、显示应用1、字符显示带中文字库的128X64-0402B每屏可显示4行8列共32个16×16点阵的汉字;每个显示RAM可显示1个中文字符或2个16×8点阵全高ASCII码字符;即每屏最多可实现32个中文字符或64个ASCII码字符的显示..带中文字库的128X64-0402B内部提供128×2字节的字符显示RAM缓冲区DDRAM..字符显示是通过将字符显示编码写入该字符显示RAM实现的..根据写入内容的不同;可分别在液晶屏上显示CGROM中文字库、HCGROMASCII码字库及CGRAM自定义字形的内容..三种不同字符/字型的选择编码范围为:0000~0006H其代码分别是0000、0002、0004、0006共4个显示自定义字型;02H~7FH显示半宽ASCII码字符;A1A0H~F7FFH显示8192种GB2312中文字库字形..字符显示RAM在液晶模块中的地址80H~9FH..字符显示的RAM的地址与32个字符显示区域有着一一对应的关系;其对应关系如下表所示..80H81H82H83H84H85H86H87H 90H91H92H93H94H95H96H97H 88H89H8AH8BH8CH8DH8EH8FH 98H99H9AH9BH9CH9DH9EH9FH其中;C语言编译器具有直接把中文转换成ASCII码字符功能..对照下面原理图;编译程序示例;并下载到实验板上;观测现象..4.寻迹避障程序#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit RM1=P0^0;sbit RM2=P0^1;//右电机sbit LM1=P0^2;sbit LM2=P0^3;//左电机sbit bzh=P2^6;sbit RAD=P0^6;//红外接收右电机转sbit LBD=P0^7;//红外接收左电机转sbit rs=P3^5;// LCD的RSsbit rw=P3^6;// LCD的R/Wsbit en=P3^7;// LCD的Evoid lcd_stringuchar *strpoint;void delayuint a{ uint b;c;forb=a;b>0;b--forc=120;c>0;c--;}uchar i=0;void checkbusy//检查LCD忙{ uchar dat;rs=0; //rs=1为数据;=0为命令.rw=1; //rw=1为读;=0为写.do{P1=0x00;en=1; //E信号下降沿锁存DB7~DBOdat=P1; //读入P1的值en=0; //锁存dat=0x80 & dat; //BUSY:1内部在工作;0正常状态}whiledat==0x00;rw=0;}void sentcomuchar com{ checkbusy; //检查Busyrs=0;en=0;P1=com;delay5;en=1;delay5;en=0;}void sentdatauchar date //写数据{checkbusy;rs=1;en=0;P1=date;delay5;en=1;delay5;en=0;}//初始化LCMvoid lcd_init{sentcom0x38;//功能设置;一次送8位数据;基本指令集sentcom0x0C;//0000;1100 整体显示;游标off;游标位置offsentcom0x01;//0000;0001 清DDRAMsentcom0x02;//0000;0010 DDRAM地址归位sentcom0x80;//1000;0000 设定DDRAM 7位地址000;0000到地址计数器AC}void lcd_stringchar *strpoint//在当前显示位置显示LCD字符串{ register i=0;whilestrpointi=0{sentdatastrpointi;i++;}}void stop{lcd_init;sentcom0x80;lcd_string"现代创新实训室";//C编译系统本省也具有转换功能;所以也可以这样写sentcom0x90;lcd_string"寻迹避障一体小车";sentcom0x88;lcd_string"--指导:文方老师";sentcom0x98;lcd_string"--设计:刘志聪";}void tracing{sentcom0x80;lcd_string"现代创新实训室"; sentcom0x90;lcd_string"--指导:文方老师"; sentcom0x88;lcd_string"--设计:刘志聪"; sentcom0x98;lcd_string" 小车寻迹中---"; }void bypass{sentcom0x80;lcd_string"现代创新实训室"; sentcom0x90;lcd_string"--指导:文方老师"; sentcom0x88;lcd_string"--设计:刘志聪"; sentcom0x98;lcd_string" 小车避障中---"; }void find{tracing;whilebzh==1{ ifLBD&&RAD==1{RM1=1;LM1=1;RM2=0;LM2=0;}ifRAD==0{RM1=0;LM1=1;RM2=0;LM2=0;ifLBD==0{RM1=1;LM1=1;RM2=0;LM2=0;delayi;}}ifLBD==0{RM1=1;LM1=0;RM2=0;LM2=0;ifRAD==0{RM1=1;LM1=1;RM2=0;LM2=0;delayi;}}}}void bizhan{ bypass;ifbzh==0{RM1=1;LM1=0;RM2=0;LM2=1;delay100;}}void main{ stop;delay2000;while1{find;bizhan;}}。
三维电子-SFC-JCAR智能小车电路原理图说明

三维电子-SFC-JCAR智能小车电路原理图说明一、小车主控板1、小车主控板实物图图1、小车主控板实物图2、小车主控板电路原理图图2、小车主控板电路原理图3、电路原理图说明程序下载电源电路H2接口为程序下载接口对应实物图1区,1-4号引脚分别电源正极、电源负极、TXD、RXD,电源正极与负极与电源插座通过带锁开关给整个控制板提供电源,下载程序时USB下载器为单片机提供下载程序所需要的电源,使用时外接电池提供工作电源。
经过带锁开关有一个VS接口,该接口主要给电机电源引脚提供,二极管与H7和H6接口连接的470UF的电容起隔离的作用,H8和H9接口为电源扩展引脚对应于实物图的4区与VCC和GND连接在一起为单片机及外设电路提供电源,带锁开关释放的时候电源指示灯熄灭,带锁开关闭合时电源指示灯点亮。
红外遥控传感器的中间引脚2号引脚为数据传输口与单片机P3.2引脚连接。
蜂鸣器电路的控制引脚与单片机P3.7引脚连接。
按键电路的两个按键信号输出引脚分别与与单片机P3.1和P3.3引脚连接。
LED电路3个控制引脚分别于单片机P3.4 P3.5 P3.6引脚连接。
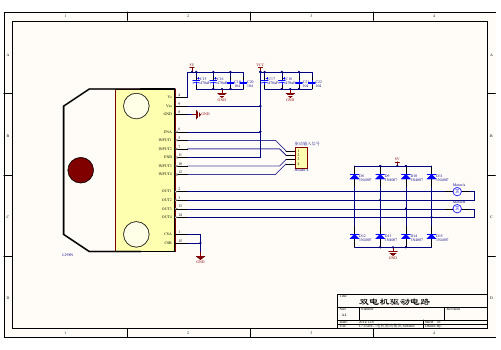
二、L298N电机驱动模块1、L298N电机驱动模块实物图图3、L298N电机驱动模块实物图2、L298N电机驱动模块电路原理图图4、L298N电机驱动模块电路原理图2、电路原理图说明电路原理图左边H0接口1号-10号引脚对应实物图标号1区从下到上(从A到B)的十个引脚,其中1号和9号引脚接地,2号引脚为VS(给电机供电的电源),10号引脚为VSS表示逻辑电压正极(与控制芯片正极连接在一起)。
3-5号控制一号电机输入端,6-8号控制二号电机的输入端。
电路原理图右边H3和H2为两个电机控制输出端。
三、寻迹避障电路1、寻迹避障电路实物图图5、寻迹避障电路实物图2、寻迹避障电路电路原理图图5、寻迹避障电路电路原理图2、电路原理图说明电源同上电以后7个红外发光二极管同时点亮,接收二极管根据前面物体的距离和演示接收不同程度的放射回来的红外线。
智能寻迹避障小车寻迹系统设计说明

第二章智能寻迹避障小车寻迹系统设计1.任务任务一:产生智能寻迹避障小车沿黑线转圈的控制程序;任务二:产生智能寻迹避障小车带状态显示沿黑线转圈的控制程序;2.要求(1)能控制智能寻迹避障小车沿黑线实现转圈功能;(2)行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之;(3)智能寻迹避障小车可以从小于90度的任意方向寻找到黑线圆圈;2.1 项目描述该项目的主要容是:在智能寻迹避障小车电机控制系统之上扩展寻迹电路,然后运用C 语言对系统进行编程,使智能寻迹避障小车实现沿黑线转圆圈的功能,并且在行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之;当人为将小车拿开,再从小于90度的任意方向放置小车,小车应能重新找回轨道,并沿黑线继续转圈。
通过该项目的学习与实践,可以让读者获得如下知识和技能:继续掌握单片机I/O端口的应用;掌握红外线收、发对管的工作原理与控制方法;掌握数码管的工作原理与控制方法;掌握单片机C语言的编程方法与技巧;能够编写出智能寻迹避障小车沿黑线实现转圈功能的控制函数;2.1 必备知识2.1.1 关于红外线传感器红外线定义:在光谱中波长自0.76至400微米的一段称为红外线,红外线是不可见光线。
所有高于绝对零度(-273.15℃)的物质都可以产生红外线。
现代物理学称之为热射线。
医用红外线可分为两类:近红外线与远红外线。
红外线发射器:红外线发射管在LED封装行业中主要有三个常用的波段,如下850NM、875NM、940NM。
根据波长的特性运用的产品也有很大的差异,850NM波长的主要用于红外线监控设备,875NM主要用于医疗设备,940NM波段的主要用于红外线控制设备。
如:红外线遥控器、光电开关、光电计数设备等。
红外线对管应用:本项目中,小车的寻迹功能采用红外线收、发对管实现。
具体工作过程如下:两对红外线收、发对管安装在智能寻迹避障小车底盘正前方,红外发射管一直发射信号,接收管时刻准备接收信号。
智能循迹避障小车设计
目录摘要 (2)绪论 (2)2方案设计与论证 (3)2.1 主控系统 (3)2.2 电机驱动模块 (4)2.3 循迹模块 (5)2.4 避障模块 (6)2.5 机械系统 (7)2.6电源模块 (7)3硬件设计 (7)3.1总体设计 (7)3.2驱动电路 (8)3.3信号检测模块 (9)3.4主控电路 (10)4 软件设计 (12)4.1主程序模块 (12)4.2电机驱动程序 (12)4.3循迹模块 (13)4.4避障模块 (15)结束语 (19)致谢 (19)参考文献 (19)智能循迹避障小车李庆滨(德州学院物理系,山东德州253023)摘要利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。
其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM 波控制。
关键词智能小车;STC89C52单片机;L298N;红外对管1 绪论自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。
人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。
视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。
视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。
但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是一种实用有效的方法。
机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能。
避障控制系统是基于自动导引小车(AVG—auto-guide vehicle)系统,基于它的智能小车实现自动识别路线,判断并自动避开障碍,选择正确的行进路线。
智能寻迹避障小车按键与显示程序设计(7-31)

#include<at89x52.h> #define uint unsigned int #define uchar unsigned char #define out P2 //定义头文件 //定义 uint 就是 unsigned int //同上 //定义 out 代表单片机P2口
(a)引脚分布图
(b)共阴数码管 (c)共阳数码管 图2 八段数码管显示块
湖南创博龙智信息 科技有限公司
1.1.2 数码管显示原理
2、工作原理
LED显示器又称为数码管,它主要由8 段发光二极管组成,如图2(a)所示。图2 (a)中,a~g为数字或字符显示段,h段 为小数点显示,通过a~g为7个发光段的不 同组合,可以显示0~9和A~F共16个数字 和字母。例如,当a、b、g、e、d段亮时 ,显示数字“2”,当a、f、e、g段亮时, 则显示字母“F”。
void delayms(uint x) { uchar i; while(x--) for(i=0;i<123;i++); }
//延时函数 12兆晶振 1000为一秒 11.0592兆晶振 922为一秒 (会有一定误差)
湖南创博龙智信息 科技有限公司
1.1 任务一:数码管循环管显示0-9
任务及要求
按键与显示模块共设置了三个任务,分别如下: 任务二:按键加、减数显示 要求:绘制程序流程图,并编写程序, 要求做到每按一次S1,数码管都加1,当 加到第10时回到0;每按一次S2,数码管 都减1。
湖南创博龙智信息 科技有限公司
任务及要求
按键与显示模块共设置了三个任务,分别如下: 任务二:按键加、减数显示 要求:绘制程序流程图,并编写程序, 要求做到每按一次S1,数码管都加1,当 加到第10时回到0;每按一次S2,数码管 都减1。
智能寻迹避障小车寻迹系统设计

智能寻迹避障小车寻迹系统设计文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]第二章智能寻迹避障小车寻迹系统设计1.任务任务一:产生智能寻迹避障小车沿黑线转圈的控制程序;任务二:产生智能寻迹避障小车带状态显示沿黑线转圈的控制程序;2.要求(1)能控制智能寻迹避障小车沿黑线实现转圈功能;(2)行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之内;(3)智能寻迹避障小车可以从小于90度的任意方向寻找到黑线圆圈;项目描述该项目的主要内容是:在智能寻迹避障小车电机控制系统之上扩展寻迹电路,然后运用C语言对系统进行编程,使智能寻迹避障小车实现沿黑线转圆圈的功能,并且在行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之内;当人为将小车拿开,再从小于90度的任意方向放置小车,小车应能重新找回轨道,并沿黑线继续转圈。
通过该项目的学习与实践,可以让读者获得如下知识和技能:继续掌握单片机I/O端口的应用;掌握红外线收、发对管的工作原理与控制方法;掌握数码管的工作原理与控制方法;掌握单片机C语言的编程方法与技巧;能够编写出智能寻迹避障小车沿黑线实现转圈功能的控制函数;必备知识2.1.1 关于红外线传感器红外线定义:在光谱中波长自至400微米的一段称为红外线,红外线是不可见光线。
所有高于绝对零度(℃)的物质都可以产生红外线。
现代物理学称之为热射线。
医用红外线可分为两类:近红外线与远红外线。
红外线发射器:红外线发射管在LED封装行业中主要有三个常用的波段,如下850NM、875NM、940NM。
根据波长的特性运用的产品也有很大的差异,850NM波长的主要用于红外线监控设备,875NM主要用于医疗设备,940NM波段的主要用于红外线控制设备。
如:红外线遥控器、光电开关、光电计数设备等。
红外线对管应用:本项目中,小车的寻迹功能采用红外线收、发对管实现。
具体工作过程如下:两对红外线收、发对管安装在智能寻迹避障小车底盘正前方,红外发射管一直发射信号,接收管时刻准备接收信号。
循迹避障智能小车设计ppt课件
电 位 器
6
红外传感器
当检测方向遇到障碍物(反射面)时,红外线反射 回来被接 收管接收,经过比较器电路处理之后,绿 色指示灯会亮起,同时信号输出接口输出数字信号 (一个低电平信号0),可通过电位器旋钮调节检 测距离,有效距离范围 2~30cm,工作电压为 3.3V-5V。
顺时针调电位器,检测距离增加;逆时针调电位器 ,检测距离减少。
17
连接剩余排线
将所有vcc高电平连一排 所有Gnd低电平连一排
18
Hale Waihona Puke 固定完成19软件部分
避障程序 .docx
避障.mp4
避障程序
20
循迹程序框图
循迹程序 .docx
循迹.mp4
21
2
总体设计
智能小车采用两轮驱动,左右轮各用一个直 流电机驱动。在车体前部装有用于检测距离 的红外传感器和底部装有用于检测黑白线的 灰度传感器。通过主控芯片对小车的电机驱 动进行控制,实现两个电机不同功能(前进 、停止、后退)组合运行。达到避障、循迹 的目的
3
硬件部分
4
智能小车结构
5
传感器
基于单片机的智能小车设计
指导老师: 班级:
制作:
1
智能小车介绍
智能小车是一种能够通过编程手段完成特定任务的 小型化机器人, 它具 有制作成本低廉,电路结构简单, 程序调试方便等优点.由于具有很强的趣味性,智能 小车深受广大机器人爱好者以及高校学生的喜爱.
循迹小车电路图
COR16 R16 1K COU5 U5
2
PIR1602
VCC_1
Header 6
1K
LED0
PISTC1029 30 PISTC1030
COR15 R15
PIR1502 PIR1501
29 31
PISTC1018 PISTC1019
18 19
1K
PIU204 PIU201
PIC1202 PIC1201
双电机驱动电路
Number 2014/12/6 C:\Users\..\电机驱动模块.SchDoc Sheet of Drawn By: 4 Revision
D
1
2
3
4 8V
COD1 D1
VCC_1
PID101 COµçÔ´½Ó¿Ú1 电源接口 1 PID102
COLM7805 LM7805
1 PILM780501
PISTC1021 PISTC1022
11 PIU3011 12 PIU3012 13 PIU3013 14 PIU3014 15 PIR1101 PIR1102 PIU3015 NLGNDPIU3016 16 GND COR11 10 R11
10 PIU3010
E DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 BLA BLK
Header 4
PIL298N012
PID802
PID801
COD8 D8 1N4007
PID902
PID901
COD9 D9 1N4007
PID10 2
PID10 1
COD10 D10 1N4007
PID1 02
PID1 01
COD11 D11 1N4007 COMotorA MotorA
循迹避障智能小车

智能车可行性方案实现功能:小车自动测距,避障,寻迹。
技术关键:小车的测距需要用到传感器来测量距离障碍物超声波的距离;小车避障则需要注意当小车与障碍物之间距离小于某一数值时,车通过电动机转向;寻迹则需要通过车底部的光电传感器检测行驶方向是否偏离黑线,在通过电动机调整运行方向。
一.结构框图二.具体电路分析,1寻迹电路技术关键:在小车底部前部并排安置3各个光电传感器。
当小车沿直线形式是,三个接收器中两边为高电平,中间低电平,小车直行(如图1);黑线转弯时,中间和一边为高电平,另一边为低电平,则小车向低电平一端旋转,直到回到1状态(如图2,3)。
方案1:用红外发射管和接收管作为寻迹传感器。
红外发射管发出红外线,当发出的红外线射到白纸的平面后反射,若红外接收管能接受到反射回的光线则能检测出白纸继而输出低电平;若接受不到发射管发出的光线则输出高电平。
但是红外对管工作不稳定,且容易受外界光线的影响。
方案2:用RPR220型光电对管,它是一种反射性光电探测器。
使用光电传感器,当接收管收到二极管发出光的反射,三级管导通。
电压送入比较器的一端,比较起的另一端输入基准电压。
当光敏二极管产生电压时,比较器输出高电平,反之输出低电平给I/O端口。
所以,为了避免外界干扰,选择第二种方案。
电路图如下2,振荡电路的设计技术关键:超声波发射器发射波时须输入40KHz的正弦信号或方波。
所以在在发射器之前应有一个信号触发电路,确保发射器正常工作。
方案1:用软件产生。
使用Atmega16中的PWM产生40KHz的方波,输出给超声波发射器,但程序较为复杂。
方案2:用硬件产生。
使用555多谐振荡器,构成单稳态触发电路,产生40KHZ方波信号由于555内部比较器灵敏度高,而且采用差分电路形式其振荡频率受电源电压何温度变化影响很小。
有频率公式f=1.43/(R1+2R2)C确定R1= R2=119 C= 0.1uF方案3:硬件产生,由自激振荡电路产生40KHz的正弦信号,选用RC自激振荡电路。
循迹小车原理

寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
寻迹避障小车原理

循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。